MC0201U中文资料
Moxa MC-1200系列 Industrial Computer 产品介绍说明书

MC-1200系列為IIOT/AI/機械學習應用的極輕巧耐用之Intet Core i7的專用機特色與優點•適用於Wi-Fi、3G、LTE、GPS和mSATA擴充模組的3個Mini-PCIe插槽•第7代Intel®Core™處理器(Kaby Lake U)•2個內建DDR4記憶體插槽;總計容量高達32GB•內建TPM2.0模組•各種介面:2個串列埠、2個Giga LAN、3個USB3.0(類型A)連接埠認證簡介MC-1200系列電腦是以第7代Intel®Celeron®或Intel®Core™i3、i5或i7處理器為基礎所打造,並且隨附1個HDMI顯示器埠、3個USB3.0連接埠、2個gigabit LAN連接埠,以及2個三合一RS-232/422/485串列埠。
MC-1200配備有2.5吋硬碟/固態硬碟插槽,以及內建TPM2.0模組。
此系列電腦採用模組化設計,配備三個獨立插槽,提供附加價值與便利性。
使用者可以選擇新增各種不同的通訊模組,包括Wi-Fi、3G、LTE、GPS和mSATA擴充模組。
由於符合UL Class1Division2標準,MC-1200無疑能夠為石油天然氣應用提供穩定可靠的系統運作。
Class1Division2(C1D2)是發給產品的認證,證明產品能夠在潛在危險的環境中使用。
危險工作環境的例子包括存在易燃或易爆炸氣體、特定化學物質、空氣傳播的纖維,或是在異常情況下蒸汽可能過量的場所。
MC-1200旨在於極端條件的情況下可靠地操作,例如持續曝露在低溫或是高溫、潮濕、高振動以及電力突波,從而使它們非常適合應用於重工業、太陽能電網、水/廢水、石油與天然氣,以及運輸等產業。
主動式監控功能Moxa Proactive Monitoring是一款低能耗、低資源耗用且易於使用的公用程式,可允許使用者追蹤一些系統參數。
使用者只需按一下使用者介面參數中的相應圖示,即可查看這些關鍵零件目前的參數值。
PRC0201资料

15V 25V
0.390 ±0.002
(1.00±0.05) (1.60±0.10) (2.00±0.15)
0.020 ±0.002
(0.50±0.05) (0.08±0.10) (1.25±0.15)
0.014 ±0.002
(0.35±0.05) (0.50±0.10) (0.50±0.15)
0.008 ±0.004
Data subject to change without notice
Resistance Tolerance Resistance Value Temperature Coefficient Case Size Type
Continued on reverse side REV C 9/19/01
TEMPERATURE CYCLE
HIGH TEMPERATURE
RANDOM VIBRATION
MECHANICAL SHOCK
RESISTANCE TO SOLDERING HEAT
SOLDERABILITY
SHORT TIME OVERLOAD
HUMIDITY
LOAD LIFE
100 Ω 10 KΩ 100 KΩ 100 Ω 10 KΩ 100 KΩ 100 Ω 10 KΩ 100 KΩ 100 Ω 10 KΩ 100 KΩ 100 Ω 10 KΩ 100 KΩ 100 Ω 10 KΩ 100 KΩ 100 Ω 10 KΩ 100 KΩ 100 Ω 10 KΩ 100 KΩ 100 Ω 10 KΩ 100 KΩ 100 Ω 10 KΩ 100 KΩ
0.098 ±0.006
(2.50±0.15)
0.022 ±0.006
(0.56±0.15)
proteus元件名称中英文对照表

元件名称中英文名说明7407 驱动门1N914 二极管74Ls00 与非门74LS04 非门74LS08 与门74LS390 TTL 双十进制计数器7SEG 4针BCD-LED 输出从0-9 对应于4根线的BCD码7SEG 3-8译码器电路BCD-7SEG转换电路ALTERNATOR 交流发电机AMMETER-MILLI mA安培计AND 与门BA TTERY 电池/电池组BUS 总线CAP 电容CAPACITOR 电容器CLOCK 时钟信号源CRYSTAL 晶振D-FLIPFLOP D触发器FUSE 保险丝GROUND 地LAMP 灯LED-RED 红色发光二极管LM016L 2行16列液晶可显示2行16列英文字符,有8位数据总线D0-D7,RS,R/W,EN三个控制端口(共14线),工作电压为5V。
没背光,和常用的1602B功能和引脚一样(除了调背光的二个线脚)LOGIC ANAL YSER 逻辑分析器LOGICPROBE 逻辑探针LOGICPROBE[BIG] 逻辑探针用来显示连接位置的逻辑状态LOGICSTATE 逻辑状态用鼠标点击,可改变该方框连接位置的逻辑状态LOGICTOGGLE 逻辑触发MASTERSWITCH 按钮手动闭合,立即自动打开MOTOR 马达OR 或门POT-LIN 三引线可变电阻器POWER 电源RES 电阻RESISTOR 电阻器SWITCH 按钮手动按一下一个状态SW-SPDT-mom 二选通一按钮触发开关BUTTONVOLTMETER 伏特计VOLTMETER-MILLI mV伏特计VTERM 串行口终端Electromechanical 电机Inductors 变压器Laplace Primitives 拉普拉斯变换Memory IcsMicroprocessor IcsMiscellaneous 各种器件AERIAL-天线;ATAHDD;ATMEGA64;BATTERY;CELL;CRYSTAL-晶振;FUSE;METER-仪表;Modelling Primitives 各种仿真器件是典型的基本元器模拟,不表示具体型号,只用于仿真,没有PCBOptoelectronics 各种发光器件发光二极管,LED,液晶等等PLDs & FPGAsResistors 各种电阻Simulator Primitives 常用的器件Speakers & SoundersSwitches & Relays 开关,继电器,键盘BUTTON 触发开关Switching Devices 晶阊管Transistors 晶体管(三极管,场效应管)TTL 74 seriesTTL 74ALS seriesTTL 74AS seriesTTL 74F seriesTTL 74HC seriesTTL 74HCT seriesTTL 74LS seriesTTL 74S seriesAnalog Ics 模拟电路集成芯片Capacitors 电容集合CMOS 4000 seriesConnectors 排座,排插Data Converters ADC,DACDebugging Tools 调试工具7SEG 数码管ECL 10000 Series 各种常用集成电路1.电阻固定电阻:RES半导体电阻:RESSEMT电位计;POT变电阻;RV AR可调电阻;res1可变电阻pot2.电容定值无极性电容;CAP定值有极性电容;CAP半导体电容:CAPSEMI可调电容:CAPV AR3.电感:INDUCTOR4.二极管:DIODE.LIB发光二极管:LED5.三极管:NPN16.结型场效应管:JFET.lib7.MOS场效应管8.MES场效应管9.继电器:PELAY. LIB10.灯泡:LAMP11.运放:OPAMP12.数码管:7-SEG_DP (MISCELLANEOUS DEVICES.LIB)13.开关;sw_pb原理图常用库文件:Miscellaneous Devices.ddbDallas Microprocessor.ddbIntel Databooks.ddbProtel DOS Schematic Libraries.ddbPCB元件常用库:Advpcb.ddbGeneral IC.ddbMiscellaneous.ddb部分分立元件库元件名称及中英对照AND 与门ANTENNA 天线BA TTERY 直流电源BELL 铃,钟BVC 同轴电缆接插件BRIDEG 1 整流桥(二极管) BRIDEG 2 整流桥(集成块) BUFFER 缓冲器BUZZER 蜂鸣器CAP 电容CAPACITOR 电容CAPACITOR POL 有极性电容CAPV AR 可调电容CIRCUIT BREAKER 熔断丝COAX 同轴电缆CON 插口CRYSTAL 晶体整荡器DB 并行插口DIODE 二极管DIODE SCHOTTKY 稳压二极管DIODE V ARACTOR 变容二极管DPY_3-SEG 3段LEDDPY_7-SEG 7段LEDDPY_7-SEG_DP 7段LED(带小数点) ELECTRO电解电容FUSE 熔断器INDUCTOR 电感INDUCTOR IRON 带铁芯电感INDUCTOR3 可调电感JFET N N沟道场效应管JFET P P沟道场效应管LAMP 灯泡LAMP NEDN 起辉器LED 发光二极管METER 仪表MICROPHONE 麦克风MOSFET MOS管MOTOR AC 交流电机MOTOR SERVO 伺服电机NAND 与非门NOR 或非门NOT 非门NPN NPN三极管NPN-PHOTO 感光三极管OPAMP 运放OR 或门PHOTO 感光二极管PNP 三极管NPN DAR NPN三极管PNP DAR PNP三极管POT 滑线变阻器PELAY-DPDT 双刀双掷继电器RES1.2 电阻RES3.4 可变电阻RESISTOR BRIDGE ? 桥式电阻RESPACK ? 电阻SCR 晶闸管PLUG ? 插头PLUG AC FEMALE 三相交流插头SOCKET ? 插座SOURCE CURRENT 电流源SOURCE VOLTAGE 电压源SPEAKER扬声器SW ? 开关SW-DPDY ? 双刀双掷开关SW-SPST ? 单刀单掷开关SW-PB 按钮THERMISTOR 电热调节器TRANS1 变压器TRANS2 可调变压器TRIAC ? 三端双向可控硅TRIODE ? 三极真空管V ARISTOR 变阻器ZENER ? 齐纳二极管DPY_7-SEG_DP 数码管SW-PB 开关其他元件库Protel Dos Schematic 4000 Cmos .Lib (40.系列CMOS管集成块元件库)4013 D 触发器4027 JK 触发器Protel Dos Schematic Analog Digital.Lib(模拟数字式集成块元件库)AD系列DAC系列HD系列MC系列Protel Dos Schematic Comparator.Lib(比较放大器元件库)Protel Dos Shcematic Intel.Lib(INTEL公司生产的80系列CPU集成块元件库)Protel Dos Schematic Linear.lib(线性元件库)例555Protel Dos Schemattic Memory Devices.Lib(内存存储器元件库)Protel Dos Schematic SYnertek.Lib(SY系列集成块元件库)Protes Dos Schematic Motorlla.Lib(摩托罗拉公司生产的元件库)Protes Dos Schematic NEC.lib(NEC公司生产的集成块元件库)Protes Dos Schematic Operationel Amplifers.lib(运算放大器元件库)Protes Dos Schematic TTL.Lib(晶体管集成块元件库74系列)Protel Dos Schematic Voltage Regulator.lib(电压调整集成块元件库)Protes Dos Schematic Zilog.Lib(齐格格公司生产的Z80系列CPU集成块元件库)元件属性对话框中英文对照Lib ref 元件名称Footprint 器件封装Designator 元件称号Part 器件类别或标示值Schematic Tools 主工具栏Writing Tools 连线工具栏Drawing Tools 绘图工具栏稳压二极管ZENER DIODE肖特基二极管SCHOTTKY DIODE二极管DIODE变容二极管V ARIODE三极管TRANSISTOR电感INDUCTOR磁环EMIFIL电阻RESISTOR电容CAPACITY晶振CRYSTAL涤纶电容MYLAR CAP电解电容ELECT CAP瓷片电容CERAMIC CAP安规电容FILM CAPProtel 99 se的元件中英文PcbRe: [分享] protel99se 元件名系表--分立元件库中英文对照电阻AXIAL 无极性电容RAD 电解电容RB- 电位器VR 二极管DIODE 三极管TO 电源稳压块78和79系列TO-126H和TO-126V 场效应管和三极管一样整流桥D-44 D-37 D-46 单排多针插座CON SIP 双列直插元件DIP 晶振XTAL1电阻:RES1,RES2,RES3,RES4;封装属性为axial系列无极性电容:cap;封装属性为RAD-0.1到rad-0.4电解电容:electroi;封装属性为rb.2/.4到rb.5/1.0电位器:pot1,pot2;封装属性为vr-1到vr-5二极管:封装属性为diode-0.4(小功率)diode-0.7(大功率)三极管:常见的封装属性为to-18(普通三极管)to-22(大功率三极管)to-3(大功率达林顿管)电源稳压块有78和79系列;78系列如7805,7812,7820等79系列有7905,7912,7920等常见的封装属性有to126h和to126v整流桥:BRIDGE1,BRIDGE2: 封装属性为D系列(D-44,D-37,D-46)电阻:其中指电阻的长度,一般用AXIAL0.4瓷片电容:。
广东美西科技有限公司牙刷说明书

7
8
下 列情况不属于保修范畴: 1. 因认为使用不当或缺乏合理的保养造成的产品损坏。 2. 因火灾、地震、水灾、雷击、其他自然灾害、公害等造成的产品故障 及损坏。 3. 保修期内终止保修的情况: 。1 产品经非美的授权人员的修理或拆装。 。2 产品使用了非本公司的零件。 。3 产品非家庭使用(如工业用、商业用等)引起的损坏。在保修期内替换的 零件或整机,享有的免费保修服务与本产品免费保修服务期同时终止, 除非确有相关法律规定,本公司对其它任何要求概不负责。 4. 在保修期内,对于因材料或生产引起的各类瑕疵,公司予以更换零件或 产品。申请保修时,请务必将瑕疵产品以及能够证明购买日期的单据(购 买发票)一并送至美的授权的客服中心。 5. 在保修期内所替换的零件或整机为本公司所有。 6. 有关维修服务方面的任何问题,请咨询美的授权的客服中心。 7. 服务及保修内容可咨询: 4008609663
配件明细
编号
名称
主体
防吞咽配件
刷头
AAA干电池
数量
1
1
2
1
注:请仔细核对您的产品配件及数量。
1
2
使用步骤
建议使用BASS科学刷牙法,每天刷牙2次,每次不少于2分钟。掌握正确 刷牙步骤,保持口腔健康。
1
2
向左旋转打开电池盖取出绝缘片。 请按正确方向安装刷头。
3
4
为防止牙膏飞溅,请先将牙膏挤 在刷头上,放入口中后再启动牙 刷。
请认真填写您的信息 请将此卡连同需维修产品一起寄回我公司维修中心。
6
保修说明
承蒙惠购美的产品,谨致谢意! 美的为了切实保护消费者放心满意地使用本公司的优质产品,将严格遵守 国家颁布的有关法律遵照《中国消费者权益保护法》、《中国产 品质量法》 的具体条款以及“三包”的相关规定,规范我公司售后服务制度。现对您所 享受的保修权益作如下说明: 1. 购买下订单时,请留下您的真实联系信息,如因联系方式不准确导致 本公司无法实际履行免费保修服务义务,购买者自行承担责任。 2. 凡属在正常使用情况下,由于产品本身质量问题引起的故障,在保修 期内,我公司将负责给予免费的维修服务。自购买本产品之日起,享有 两年的免费保修服务。 注:保修范围包括牙刷主体(不包含刷头等易耗品)
[电子电路]蒂森电梯MC1资料
![[电子电路]蒂森电梯MC1资料](https://img.taocdn.com/s3/m/9d15cc12cd1755270722192e453610661fd95a50.png)
MC-1序号内容页数第一章MC1概述 21 介绍 22 CAN BUS 23 门系统 3第二章控制柜 41 控制系统 42 PC板介绍 5 (1)MC1主板 5 (2)MZ1 7 (3)MW1 9 (4)MQ1 11 (5)MB2.1 13 (6)MN3 13 (7)MH2 14 (8)TF 14 (9)MP 15 (10)ESA 21 (11)MV6 243 驱动系统26第三章轿厢和井道271 轿厢和井道概述272 轿厢PC板28 (1)MF3 28 (2)MF4 32 (3)LMS1 343 井道MS2 35第四章门机371 SELCOM 372 F5 56第五章调试801 MC1软件设置802 慢车和快车873 LMS1称重装置105 附录电器线路图125第一章MC1 概况1.介绍MC1是TCM基础上新开发的产品。
CPU电路板MC1专门配在TCM控制上使用。
它带一个16位微处理器,集合了当前所知的所有功能。
最终的扩展还将包括路径计算机电路板MW1和接口电路板MD1(用于CPI驱动,API-S和Isostop16M)的功能。
来自旋转脉冲发生器的脉冲槽道A和B能够被写入,而且直接由MC1处理。
两项基本改动会对井道导入(AF10)产生影响。
此外MC1带一个所谓的瞬时存储EPROM,其存储容量为1Mbyte, 通过电梯工作程序中可用二种不同的装入方式对它进行编程。
MC1 控制柜2.CAN BUSMC1通过CAN BUS线进行串行通信。
其特点有:各通信系统连线少,通信速度快,可靠性好,抗干扰强。
The copyright of this book is reserved by3.门系统MC1可选择F2;F3;F4;F5;SELCOM 等门系统。
4.驱动系统MC1可选择API ,CPI ,ISOSTOP 16M ,液压驱动系统。
API 变频器第二章 控制柜1. 控制系统控制柜简图The copyright of this book is reserved 2. PC 板介绍(1).MC1 板(6510078680)电路板MC1 –元件端运行位置:MC1前端5VDC电压供应至MC1:通过来自MH2或MN3的MV6接线板The copyright(2)MZ1板(65 100 59 680)H2 H6 S1 S2H1 H5H3MZ1电路板-硬件中心 MZ1前视图用于启动端头电阻(此电阻必须总是要连上)的跳线。
CMC01资料
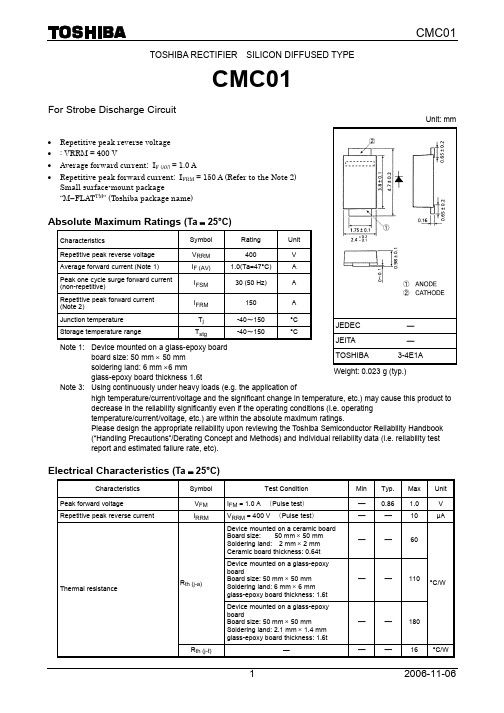
TOSHIBA RECTIFIER SILICON DIFFUSED TYPECMC01For Strobe Discharge Circuit• Repetitive peak reverse voltage • : VRRM = 400 V• Average forward current : I F (AV) = 1.0 A• Repetitive peak forward current : I FRM = 150 A (Refer to the Note 2)Small surface-mount package“M −FLAT TM ” (Toshiba package name)Absolute Maximum Ratings (Ta = 25°C)CharacteristicsSymbol Rating Unit Repetitive peak reverse voltage V RRM400 VAverage forward current (Note 1) I F (AV) 1.0(Ta =47°C) APeak one cycle surge forward current (non-repetitive)I FSM30 (50 Hz) ARepetitive peak forward current (Note 2)I FRM 150A Junction temperature T j -40~150 °C Storage temperature rangeT stg-40~150 °CNote 1: Device mounted on a glass-epoxy boardboard size: 50 mm × 50 mmsoldering land: 6 mm ×6 mmglass-epoxy board thickness 1.6tNote 3: Using continuously under heavy loads (e.g. the application ofhigh temperature/current/voltage and the significant change in temperature, etc.) may cause this product to decrease in the reliability significantly even if the operating conditions (i.e. operating temperature/current/voltage, etc.) are within the absolute maximum ratings.Please design the appropriate reliability upon reviewing the Toshiba Semiconductor Reliability Handbook (“Handling Precautions”/Derating Concept and Methods) and individual reliability data (i.e. reliability test report and estimated failure rate, etc).Electrical Characteristics (Ta = 25°C)Characteristics Symbol Test Condition Min Typ. Max UnitPeak forward voltageV FM I FM = 1.0 A (Pulse test ) ⎯ 0.86 1.0 V Repetitive peak reverse currentI RRMV RRM = 400 V (Pulse test ) ⎯ ⎯ 10 μA Device mounted on a ceramic boardBoard size: 50 mm × 50 mm Soldering land: 2 mm × 2 mm Ceramic board thickness: 0.64t ⎯⎯ 60Device mounted on a glass-epoxy boardBoard size: 50 mm × 50 mm Soldering land: 6 mm × 6 mm glass-epoxy board thickness: 1.6t ⎯ ⎯ 110R th (j-a)Device mounted on a glass-epoxy boardBoard size: 50 mm × 50 mmSoldering land: 2.1 mm × 1.4 mm glass-epoxy board thickness: 1.6t⎯ ⎯ 180°C/WThermal resistanceR th (j-ℓ)― ⎯ ⎯ 16 °C/WUnit: mmJEDEC―JEITA― TOSHIBA 3-4E1A Weight: 0.023 g (typ.)Note 2 Repetitive peak forward current waveformMarkingAbbreviation CodePart No.C1 CMC01Standard Soldering Padτ=1ms 、 C M =1000μF、 1pu lse/4secI 0.368×I FRMUnit: mmHandling PrecautionThe absolute maximum ratings denote the absolute maximum ratings, which are rated values and must not be exceeded during operation, even for an instant. The following are the general derating methods that we recommend when you design a circuit with a device.V RRM: We recommend that the worst case voltage, including surge voltage, be no greater than 80% of the absolute maximum rating of V RRM for a DC circuit and be no greater than 50% of that of V RRM for an AC circuit.V RRM has a temperature coefficient of 0.1%/℃. Take this temperature coefficient into account designing a device at low temperature.I F(AV): We recommend that the worst case current be no greater than 80% of the absolute maximum rating of I F(AV).Carry out adequate heat design. If you can’t design a circuit with excellent heat radiation, please set the margin by using an allowable Tamax-I F (AV) curve.This rating is only applied for a strobe flash circuit. We recommend that the worst case current be controlled less than the absolute maximum rating of I FRM. The total number of repetitive currents must be less than 5000 times within the lifespan of the device.This rating specifies the non-repetitive peak current in one cycle of a 50-Hz sine wave, condition angle 180. Therefore, this is only applied for an abnormal operation, which seldom occurs during the lifespan of the device.We recommend that a device be used at a Tj of below 120℃under the worst load and heat radiation conditions. Thermal resistance between junction and ambient fluctuates depending on the device’s mounting condition. When using a device, design a circuit board and a soldering land size to match the appropriate thermal resistance value. Please refer to the Rectifiers databook for further information.10203040501101000204060801001201401600.00.20.40.60.81.01.20.111010010000.0010.010.111010010000.00.20.40.60.81.01.20.00.20.40.60.81.01.20.11101000.20.40.60.8 1.0 1.2 1.41.6 1.82.0Ta max – I F (AV)i F – v FI n s t a n t a n e o u s f o r w a r d c u r r e n t i F(A )Instantaneous forward voltage v F (V)P F (AV) – I F (AV)A v e r a g e f o r w a r d p o w e r d i s s i p a t i o n P F (A V ) (W )Average forward current I F (AV) (A)M a x i m u m a l l o w a b l e a m b i e n t t e m p e r a t u r e T a m a x (°C )Average forward current I F (AV) (A)Surge forward current (non-repetitive)P e a k s u r g e f o r w a r d c u r r e n t I F S M (A )Number of cyclesr th (j-a) – tT r a n s i e n t t h e r m a l i m p e d a n c e r t h (j -a ) (°C /W )Time t (s)Device mounted on a glass-epoxy boardRESTRICTIONS ON PRODUCT USE20070701-EN •The information contained herein is subject to change without notice.•TOSHIBA is continually working to improve the quality and reliability of its products. Nevertheless, semiconductor devices in general can malfunction or fail due to their inherent electrical sensitivity and vulnerability to physical stress. It is the responsibility of the buyer, when utilizing TOSHIBA products, to comply with the standards of safety in making a safe design for the entire system, and to avoid situations in which a malfunction or failure of such TOSHIBA products could cause loss of human life, bodily injury or damage to property.In developing your designs, please ensure that TOSHIBA products are used within specified operating ranges as set forth in the most recent TOSHIBA products specifications. Also, please keep in mind the precautions and conditions set forth in the “Handling Guide for Semiconductor Devices,” or “TOSHIBA Semiconductor Reliability Handbook” etc.• The TOSHIBA products listed in this document are intended for usage in general electronics applications (computer, personal equipment, office equipment, measuring equipment, industrial robotics, domestic appliances, etc.).These TOSHIBA products are neither intended nor warranted for usage in equipment that requires extraordinarily high quality and/or reliability or a malfunction or failure of which may cause loss of human life or bodily injury (“Unintended Usage”). Unintended Usage include atomic energy control instruments, airplane or spaceship instruments, transportation instruments, traffic signal instruments, combustion control instruments, medical instruments, all types of safety devices, etc.. Unintended Usage of TOSHIBA products listed in his document shall be made at the customer’s own risk.•The products described in this document shall not be used or embedded to any downstream products of which manufacture, use and/or sale are prohibited under any applicable laws and regulations.• The information contained herein is presented only as a guide for the applications of our products. No responsibility is assumed by TOSHIBA for any infringements of patents or other rights of the third parties which may result from its use. No license is granted by implication or otherwise under any patents or other rights of TOSHIBA or the third parties.• Please contact your sales representative for product-by-product details in this document regarding RoHS compatibility. Please use these products in this document in compliance with all applicable laws and regulations that regulate the inclusion or use of controlled substances. Toshiba assumes no liability for damage or losses occurring as a result of noncompliance with applicable laws and regulations.。
CC0201CRNPO9BN2R7中文资料

物料编号:CC0201CRNPO9BN2R7细参数_易容网
MLCC即是多层陶瓷电容片式,是电子信息产品不可或缺的基本组件之一。
我国MLCC的生产起步在80年代初,行业早期主要是在外资企业的带动下发展起来的,近年来国内企业在技术上实现突破,行业国产化成效显著,并推动了MLCC产量迅速增长。
目前,MLCC的应用领域已从手机、电脑、电视机等消费电子领域,逐步拓展到新能源发电、新能源汽车、节能灯具、轨道交通、直流输变电、三网融合、高清电视、机顶盒、手机电视等多个行业。
对于这个悄悄活跃在人们生活中的元件你又知道多少呢.
本次易容网为大家推荐比较常用的MLCC村田 | Murata品牌的料号CC0201CRNPO9BN2R7的相关参数
易容网是深圳市易容信息技术有限公司独自研发的全球最大的MLCC搜索采购服务网站,2014年创立于深圳市南山区,全国首家电子元器件行业电容元件的搜索引擎及o2o商务服务平台。
易容网()现已建成全球最大的MLCC电容搜索引擎数据库,包含全球25家电容生产厂商超过28万组MLCC产品数据,用户可根据行业应用、物料编号、规格参数等信息快速的找到所有相关的MLCC电容数据。
易容网在搜索服务的前提下还提供村田、TDK、国巨、太阳诱电、风华高科等常见品牌产品的o2o商务服务,让企业客户实现询价、报价、在线订单、出库、实时物流、签收、账期服务等在线一站式商务服务体验。
NUC120中文手册

5.2 系统管理器 .................................................................................................................... 34
5.2.1 概述.................................................................................................................................34 5.2.2 系统复位..........................................................................................................................34 5.2.3 系统电源分配 ..................................................................................................................35 5.2.4 系统内存映射 ..................................................................................................................37 5.2.5 系统定时器(SysTick) .......................................................................................................39 5.2.6 嵌套向量中断控制器(NVIC).............................................................................................40
MC403 Power System及相关配件说明说明书

USA/ CanadaNEMA 5-15P AC male plugIEC 60320 C13 AC female connector SJT 18AWG*3C, 2m/78.7in (L)EuropeCEE 7/7 AC male plugIEC 60320 C13 AC female connector H05VV-F 0.75*3C, 2m/78.7in (L)JapanJIS C 8303 AC male plugIEC 60320 C13 AC female connector VCTF 0.75*3C, 2m/78.7in (L)AustraliaSAA power cord, AS3112 AC male plug, 10A IEC 60320 C13 AC female connector2m/78.7in (L)UKNEMA 5-15P AC male plugIEC 60320 C13 AC female connector H05VV-F 0.75*3C, 2m/78.7in (L)HARDWARE CHECKLISTUnpack the contents of the box and check that the following was included:One (1) MC403 Power SystemOne (1) MC403 instruction manualOne (1) 19” rack front panelTwo (2) pedalboard mounting bracketsTwenty (20) cables:F o u r (4) 2.1 x 5.5m m b l a c k r i g h t a n g l e t o s t r a i g h t, 1’ l o n gEight (8) 2.1 x 5.5mm black right angle to straight, 2’ longFour (4) 2.1 x 5.5mm black right angle to straight 3’ longTwo (2) 2.5 x 5.5mm red right angle to straight 4’ longOne (1) 2.1 x 5.5mm to 3.5mm black straight 2’ longOne (1) 2.1 x 5.5mm to 3.5mm black straight 3’ longOne (1) AC cord with appropriate connector for region of operation:DIRECTIONS(1) Set the red AC 115/230 input selector to your local AC voltage.(2) Plug the included AC power cord into the AC IN jack.(3) Connect the AC cord into a wall outlet.(4) Flip the ON/OFF switch to the ON position. A red LED on the rear panel will lightup to indicate the unit is active.(5) Read the OUTPUT GUIDE on the following pages to make sure you are using thecorrect output jacks and cables.(6) Connect pedals to the MC403 using supplied cables. The red LED aboveeach output jack will light to indicate that power is being supplied to theconnected pedal.(7) An AC THRU jack is located next to the AC IN jack to provide auxiliary powerto another device. DO NOT EXCEED 200 WATTS on AC THRU device!OUTPUT GUIDEBefore plugging anything into the MC403 Power System, check that the powerrequirements of the device match the output capabilities of the MC403.Specifically, you should check:(1) The device’s voltage requirement to match the MC403 output voltage.(2) Whether the device uses AC or DC.(3) The current requirement to not exceed the MC403’s MAX CURRENT spec.(4) The polarity when using DC power.The cables provided with the MC403support the industry standard positive (+)barrel and negative (-) center polarity.If you are unsure about what power your device requires,DO NOT PLUG THE DEVICE INTO THE MC403! The following list provides usageexamples for each of the output types available on the MC403.ADJUSTABLE DC OUTPUTS – Use 2.1 x 5.5mm black cables.Push the red button IN for the high voltage (10.5-15V) setting.Push the red button OUT for the low voltage (6.5-10.5V) setting.Rotate the black adjustment knob to fine tune the value.To simulate a dying battery tone on a transistor based distortion/fuzz/overdrive,set the red button OUT and rotate the adj. knob until desired tone is achieved.Radial™ Tonebone™ pedals requiring 15VDC, 400mA can be used with the redbutton IN and the adjustment knob rotated fully clockwise.9VAC OUTPUTS– Use 2.5 x 5.5mm red cables.Line 6® Stomp Modeler and POD® units (excluding Pocket POD®)9VDC OUTPUTS – Use 2.1 x 5.5mm black cables.MXR®, Crybaby®, Way Huge® Electronics pedals requiring Dunlop ECB-003Dunlop® UV1SC Stereo Chorus, JD4S RotovibeBoss® pedals requiring PSA-series adaptersElectro-Harmonix® pedals requiring 9DC-100 adapterMaxon® pedals requiring AC210N adapterIbanez® pedals requiring AC109 adapterRadial™ pedals requiring 9VDC, 40mA negative center adaptersLine6® ToneCore® series pedalsDigiTech® pedals requiring PSR200R18VDC OUTPUTS – Use 2.1 x 5.5mm black cables.MXR®, Crybaby® pedals requiring Dunlop ECB-004Dunlop® UV1 UnivibeFRONT PANEL & PEDAL BOARD BRACKET ASSEMBLYRemove the four screws on front of unit as indicated in Figure A for rack mountingor as in Figure B for pedalboard mounting. Place the brackets on the unit, line upthe holes, and replace screws to secure brackets. Use M3.0x0.5, L=8mm (max)screws if factory screws are lost.Figure B – Pedalboard MountFigure A – Rack Mount92503008461R E V CWARNING: READ THIS FIRST BEFORE OPERATING!(1)(2)(3)(4)(5)(6)(7)(8) (9) (10) (11)(12)(13) (14)。
MCP201中文资料
power transients (see Figure 1-2).This protection is optional, but should be considered as good engineering practice.
1.1.2
REVERSE BATTERY PROTECTION
An external reverse battery blocking diode can be used to provide polarity protection (see Figure 1-2). This protection is optional, but should be considered as good engineering practice.
2003 Microchip Technology Inc.
1.0
DEVICE OVERVIEW
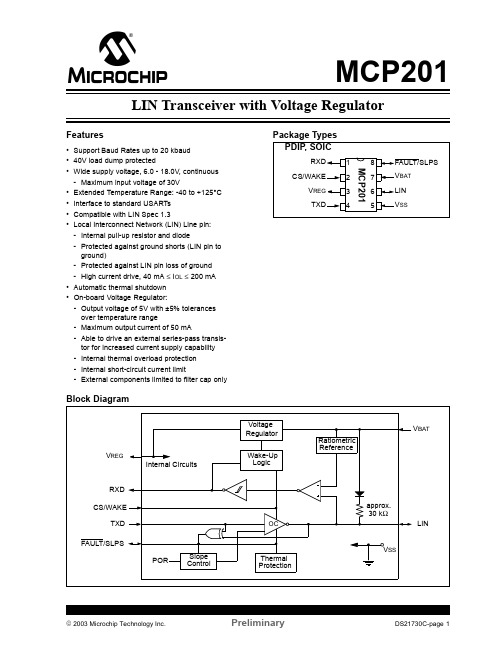
The MCP201 provides a physical interface between a microcontroller and a LIN half-duplex bus. It is intended for automotive and industrial applications with serial bus speeds up to 20 kbaud. The MCP201 provides a half-duplex, bidirectional communications interface between a microcontroller and the serial network bus. This device will translate the CMOS/TTL logics levels to LIN level logic, and vice versa. The LIN specification 1.3 requires that the transceiver of all nodes in the system be connected via the LIN pin, referenced to ground and with a maximum external termination resistance of 510Ω from LIN bus to battery (510Ω is the maximum load of the LIN bus, which corresponds to one Master and 16 Slave nodes). The MCP201 provides a +5V 50 mA regulated power supply. This function is short-circuit-protected and it can generate a thermal shutdown. The regulator has been specifically designed to operate in the automotive environment and will survive reverse battery connections, +40V load dump transients, and double-battery jumps (see Section 1.6, “Internal Voltage Regulator”).
MAX5490MC02000-T中文资料

General DescriptionThe MAX5490 precision resistor-divider consists of two accurately matched resistors with access to the ends and center of the divider. This device offers excellent resistance matching of 0.035% (A grade), 0.05% (B grade), and 0.1% (C grade). The MAX5490 provides an extremely low resistance-ratio temperature drift of 1ppm/°C (typ) over -55°C to +125°C, and has an end-to-end resistance of 100k Ω. Resistance ratios from 1:1 to 100:1 are available. Five standard ratios are available (see Table 1), and custom ratios are also available upon request. The MAX5490 is ideal for precision gain-setting applications where tight resistance matching and low temperature drift are necessary.The MAX5490 is available in a space-saving 3-pin SOT23 package, and is guaranteed over the military -55°C to +125°C temperature range.ApplicationsIndustrial Process Control Instrumentation Precision Gain Setting Medical Equipment Automatic Test Equipment Base StationsFeatures♦Resistance Ratios from 1:1 to 100:1♦Custom Ratios Available Upon Request ♦Tight Initial Ratio Accuracy0.035% (MAX5490A)0.05% (MAX5490B)0.1% (MAX5490C)♦Low 1ppm/°C (typ) Resistor-Ratio-Drift♦Up to 80V Operating Voltage Across Sum of R1and R2♦Tiny 3-Pin SOT23 PackageMAX5490100k ΩPrecision-Matched Resistor-Divider inSOT23________________________________________________________________Maxim Integrated Products 1Pin ConfigurationOrdering Information*Block Diagram19-3337; Rev 2; 3/05For pricing, delivery, and ordering information,please contact Maxim/Dallas Direct!at1-888-629-4642, or visit Maxim’s website at .*See the How to Order section for more details.M A X 5490100k ΩPrecision-Matched Resistor-Divider in SOT232_______________________________________________________________________________________ABSOLUTE MAXIMUM RATINGSDC ELECTRICAL CHARACTERISTICS(T= -55°C to +125°C, unless otherwise noted. Typical values are at T = +25°C.) (Note 1)Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.Voltage Between P1 and P2.................................................100V Maximum Current into Any Pin......................................±1.00mA Continuous Power Dissipation (T A = +70°C)3-Pin SOT23 (derate 7.1mW/°C above +70°C).........571.4mW 3-Pin SOT23 (θJ-A ).....................................................141°C/WOperating Temperature Range.........................-55°C to +125°C Junction Temperature......................................................+150°C Storage Temperature Range.............................-65°C to +150°C Lead Temperature (soldering, 10s).................................+300°CNote 1:The MAX5490 is 100% production tested at T A = +25°C. Specifications over -55°C to +125°C are guaranteed by designand characterization.Note 2:Testing conditions: T A = +25°C, V P1-P2= 10V and 80V.Note 3:For ratios from 25:1 to 100:1, contact factory.Note 4:Absolute TCR is defined asand is guaranteed by design, not production tested.and is tested at 10V and 80V.MAX5490100k ΩPrecision-Matched Resistor-Divider inSOT23_______________________________________________________________________________________39565-25535-20-1001020304050-30-55125NORMALIZED RESISTANCE-RATIO DRIFTvs. TEMPERATURETEMPERATURE (°C)R A T I O D R I F T (p p m )-80-4004080120160-1209565-25535-55125NORMALIZED RESISTANCE-RATIO DRIFTvs. TEMPERATURETEMPERATURE (°C)R A T I O D R I F T (p p m )9565-25535-150-100-50050100150200-200-55125NORMALIZED RESISTANCE-RATIO DRIFTvs. TEMPERATURETEMPERATURE (°C)R A T I O D R I F T (p p m )-0.04-0.03-0.02-0.0100.010.020.030.0402040607010305080RESISTANCE-RATIO ACCURACYvs. VOLTAGEVOLTAGE (V)R A T I O A C C U R A C Y (%)0.11011001000FREQUENCY RESPONSEFREQUENCY (kHz)RE S P O N S E (d B )6-18-12-9-33-15-60Typical Operating Characteristics(V P1-P2= 10V, TA = +25°C, unless otherwise noted.)Note 5:Resistance-ratio voltage coefficient is defined asand is guaranteed by design, not production tested.Note 6:where C = C P3and DC ELECTRICAL CHARACTERISTICS (continued)(T A = -55°C to +125°C, unless otherwise noted. Typical values are at T A = +25°C.) (Note 1)M A X 5490100k ΩPrecision-Matched Resistor-Divider in SOT234_______________________________________________________________________________________Detailed DescriptionAs shown in the Block Diagram , the MAX5490 consists of two precision, low-ratio-drift resistors with an end-to-end resistance of 100k Ω(R 1+ R 2). P3 is the set point of the divider. The maximum working voltage of the MAX5490 is 80V. This device offers a wide range of resistance ratios (R 1/R 2) from 1:1 to 100:1 and is ideal for precision operational amplifier gain/attenuation con-trol. A maximum initial ratio accuracy of 0.035% and a low 1ppm/°C ratio drift enhance system accuracy.Applications InformationSelf-Heating and ErrorApplying a voltage across terminals P1 and P2 causesthe device to heat up due to power dissipation. In high-voltage applications, consider the error in resistance-ratio temperature coefficient caused by self-heating.The worst-case self-heating occurs when the operating voltage attains its maximum value. Approximate the result of power dissipation under this condition as:The thermal resistance from junction to ambient, θJ-A ,for a 3-pin SOT23 package is 141°C/W. Calculate the resulting temperature rise as:∆T = 64mW x 141°C/W = 9.02°CIf the ratio temperature coefficient is 1ppm/°C (typ), the total error introduced by self-heating is:9.02°C x 1ppm/°C = 9.02ppmPin Description10001011001k100FREQUENCY (Hz)N O I S E (n V /√H z )10SPECTRAL NOISE DENSITYM A X 5490 t o c 061001010.10.010.0010.0001101k 10k 100100kTOTAL HARMONIC DISTORTIONPLUS NOISE RESPONSEFREQUENCY (Hz)T H D +N (%)Typical Operating Characteristics (continued)(V P1-P2= 10V, T A = +25°C, unless otherwise noted.)MAX5490100k ΩPrecision-Matched Resistor-Divider inSOT23_______________________________________________________________________________________5Figure 3. Buffered Attenuator Figure 1. Inverting Amplifier Configuration Figure 4. Attenuator with BufferFigure 2. Noninverting Amplifier ConfigurationTypical ApplicationsM A X 5490100k ΩPrecision-Matched Resistor-Divider in SOT236_______________________________________________________________________________________Example Part NumbersMAX5490100k ΩPrecision-Matched Resistor-Divider inSOT237Table 2. Ratio RangesChip InformationTRANSISTOR COUNT: 0PROCESS: BiCMOS*Standard ratios are available for ordering in any quantity. Nonstandard ratios are also available for values between 1:1 to 100:1. A minimum order quantity of 10,000 units is required for nonstandard ratios. Please contact factory for more information.M A X 5490100k ΩPrecision-Matched Resistor-Divider in SOT23Maxim cannot assume responsib ility for use of any circuitry other than circuitry entirely emb odied in a Maxim product. No circuit patent licenses are implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.8_____________________Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600©2005 Maxim Integrated ProductsPrinted USAis a registered trademark of Maxim Integrated Products, Inc.Package Information(The package drawing(s) in this data sheet may not reflect the most current specifications. For the latest package outline information,go to /packages .)。
0201制程简介

0.5 1.3 0.5 1.3 0.5 1.3
擦拭频率
無 無 每5片印刷 每5片印刷 每片印刷 每片印刷
平均厚度 (um)
118.5 115.5 113.5 115.4 112.4 115.5
標準偏差 (um)
15.6 14.5 15.2 16.6 15.5 14.2
缺陷描述
產品參數: 1. 尺寸: 64.8mm×36.6mm ×0.5mm 2. 最小間距: 0.6mm 3. 0201用量: 34
㈣ 0201的工藝導入
錫膏印刷
錫膏
刮刀
設備
鋼板
印刷參數
設備: MPM UP2000
刮刀: 金屬刮刀
錫膏: Type IV錫膏
成份Sn 95.5% Ag 3.8% Cu 0.7%,顆粒10~25um
業界尚沒有制定出統一的 0201工藝標準
㈡
認識0201
業界所面臨的現 實是零件變的越來越 小, 0201片狀電容比 0402小75%,在電 路板上所占的面積少 了66%. 它的尺寸 為:0.6mm×0.3mm ×0.3mm.
㈢ 產品介紹
技術難點: 1. 0201的印 刷 2. 0201的拾 取和貼裝的可靠 性 3. 0201的回 流焊接
當颗粒大于20µ m時,元件偏 斜是可能的,因為顆粒在焊 盤上分布不均。因為元件貼 裝時間是幾毫秒,所以在任 何不平的表面中能造成零件 偏斜或運動,所以我們選用 Type IV的錫膏
Acceptable Under Travel Nozzle
Excess Over Travel
Drag
Solder Particle Flux
ZM32-U 系列 ZigBee 模块数据手册说明书
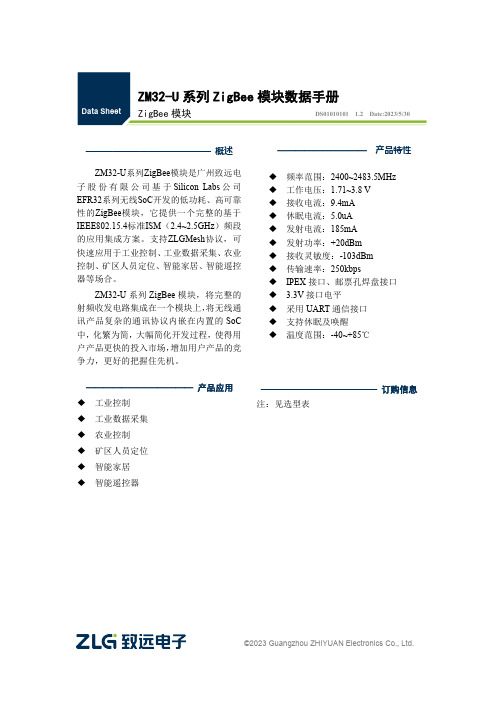
©2023Guangzhou ZHIYUAN Electronics Co.,Ltd.ZM32-U 系列ZigBee 模块数据手册ZigBee 模块DS01010101 1.2Date:2023/5/30——————————————概述ZM32-U 系列ZigBee 模块是广州致远电子股份有限公司基于Silicon Labs 公司EFR32系列无线SoC 开发的低功耗、高可靠性的ZigBee 模块,它提供一个完整的基于IEEE802.15.4标准ISM (2.4~2.5GHz )频段的应用集成方案。
支持ZLGMesh 协议,可快速应用于工业控制、工业数据采集、农业控制、矿区人员定位、智能家居、智能遥控器等场合。
ZM32-U 系列ZigBee 模块,将完整的射频收发电路集成在一个模块上,将无线通讯产品复杂的通讯协议内嵌在内置的SoC 中,化繁为简,大幅简化开发过程,使得用户产品更快的投入市场,增加用户产品的竞争力,更好的把握住先机。
————————————产品应用◆ 工业控制◆ 工业数据采集◆ 农业控制◆ 矿区人员定位◆ 智能家居◆ 智能遥控器—————————————订购信息注:见选型表——————————产品特性◆频率范围:2400~2483.5MHz ◆工作电压:1.71~3.8V ◆接收电流:9.4mA ◆休眠电流:5.0uA ◆发射电流:185mA ◆发射功率:+20dBm ◆接收灵敏度:-103dBm ◆传输速率:250kbps◆IPEX 接口、邮票孔焊盘接口◆ 3.3V 接口电平◆采用UART 通信接口◆支持休眠及唤醒◆温度范围:-40~+85℃修订历史目录1.产品简介 (1)1.1概述 (1)1.2产品命名规则 (1)1.3产品选型 (2)2.外观尺寸 (3)3.引脚定义 (4)4.电气参数 (7)4.1工作条件 (7)4.2工作环境 (7)4.3产品功耗 (7)5.射频参数 (8)6.生产指导 (9)6.1推荐生产回流温度曲线 (9)6.2推荐生产回流温度时间对照表 (9)7.硬件设计参考 (10)7.1最小系统 (10)7.2推荐系统 (10)7.3电源设计 (11)7.4RF设计 (11)7.4.1外接天线使用指导 (11)7.4.2邮票孔天线接口设计指导 (11)7.4.3外接连接器参考尺寸图 (12)7.4.4PCB布板注意事项 (12)8.包装信息 (14)9.免责声明 (15)1.产品简介1.1概述ZM32-U系列ZigBee模块是广州致远电子股份有限公司基于ZM32系列ZigBee模块推出的升级版本,具备更优异的综合性能。
摩菲控制器MC系列说明书

说明MC 系列 Millennium 控制器是一种以微机为基础的监视、控制和数据采集系统。
MC 系列适用于机动压缩机及其它多种工业设备控制。
MC 系列作为成套控制设备的核心,可无间断地监视输入信号和设置点,并相应控制输出,以保持设备正常运行。
如果输入发生超限,控制器会显示关键的设备运行参数或停机故障信息。
除监视,停机和控制功能外,MC 系列控制器还可进行重要的设备及操作数据的本地以及远程通信。
此高级系统提供了多种远程通信选择。
对于可编程逻辑控制器、PC 和 SCADA 系统均提供了一个串行链接。
无线电和卫星通信通过 MODBUS RTU 协议提供。
设备运行时间和历史数据趋势记录为运行分析和保养提供了有效的工具。
此外,停机快照功能能让操作人员全面了解系统停机时的完整状况。
摩菲公司 (Murphy) 可为您定制设计成套控制设备,以满足您的具体规格要求。
此外,还可提供多种非常经济实惠的预设计系统。
基本组件MC 系列由一个显示模块、一个带有连接电缆的电源,以及各种扩展模块和相应电缆组成。
控制器显示 PC 模块MCH-V-M :586 兼容处理器、100 MHz ;8MB RAM ;VFD 显示屏电源MCPS-A2:带两路模拟输出。
I/O 扩展模块C267:8 路数字输入、7 路模拟输入、电源监视、8 路数字输出。
9 – 28 伏直流,2.25 – 11.2 瓦,不包括最大 18 安的额外输出。
C277:18 路热电偶或 4 – 20 毫安电流输入。
9 至 28 伏直流,0.6 瓦C287:9 至 28 伏直流,3 – 5 瓦,包括4 – 20 毫安输出。
电缆部件MCCA72:电源线部件。
MC 系列通用规格电源输入:10 – 32 伏直流,最大 26 瓦。
操作温度:-40 至 85°C (-40 至 185°F )底座装置及VFD 显示 -40 至 85°C (-40 到185°F )。
GP1UM26RK00F;GP1UM261RK0F;GP1UM281QK0F;GP1UM287RK;GP1UM277RK0F;中文规格书,Datasheet资料
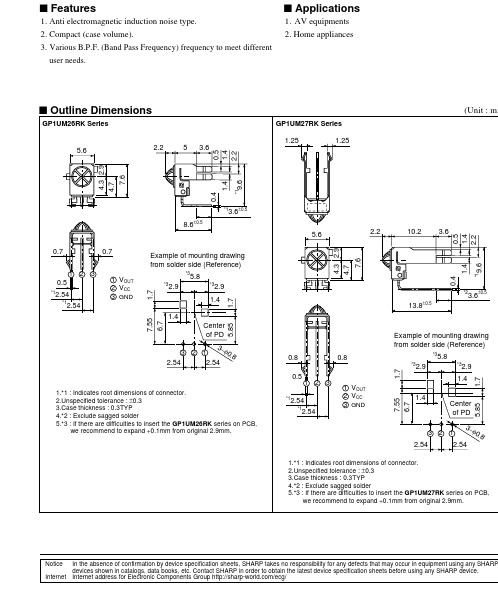
NOTICEG The circuit application examples in this publication are provided to explain representative applications of SHARPdevices and are not intended to guarantee any circuit design or license any intellectual property rights. SHARP takes no responsibility for any problems related to any intellectual property right of a third party resulting from the use of SHARP's devices.G Contact SHARP in order to obtain the latest device specification sheets before using any SHARP device. SHARPreserves the right to make changes in the specifications, characteristics, data, materials, structure, and other contents described herein at any time without notice in order to improve design or reliability. Manufacturing locations are also subject to change without notice.G Observe the following points when using any devices in this publication. SHARP takes no responsibility for damagecaused by improper use of the devices which does not meet the conditions and absolute maximum ratings to be used specified in the relevant specification sheet nor meet the following conditions:(i)The devices in this publication are designed for use in general electronic equipment designs such as:--- Personal computers--- Office automation equipment--- Telecommunication equipment [terminal]--- Test and measurement equipment--- Industrial control--- Audio visual equipment--- Consumer electronics(ii)Measures such as fail-safe function and redundant design should be taken to ensure reliability and safety when SHARP devices are used for or in connection with equipment that requires higher reliability such as:--- Transportation control and safety equipment (i.e., aircraft, trains, automobiles, etc.)--- Traffic signals--- Gas leakage sensor breakers--- Alarm equipment--- Various safety devices, etc.(iii)SHARP devices shall not be used for or in connection with equipment that requires an extremely high level of reliability and safety such as:--- Space applications--- Telecommunication equipment [trunk lines]--- Nuclear power control equipment--- Medical and other life support equipment (e.g., scuba).G If the SHARP devices listed in this publication fall within the scope of strategic products described in the ForeignExchange and Foreign Trade Law of Japan, it is necessary to obtain approval to export such SHARP devices.G This publication is the proprietary product of SHARP and is copyrighted, with all rights reserved. Under the copyrightlaws, no part of this publication may be reproduced or transmitted in any form or by any means, electronic or mechanical, for any purpose, in whole or in part, without the express written permission of SHARP. Express written permission is also required before any use of this publication may be made by a third party.G Contact and consult with a SHARP representative if there are any questions about the contents of this publication. /分销商库存信息:SHARP-MICROELECTRONICSGP1UM26RK00F GP1UM261RK0F GP1UM281QK0F GP1UM287RK GP1UM277RK0F GP1UM271RK0F GP1UM272RK0F GP1UM282RK0F GP1UM282RK GP1UM282QK0F GP1UM28RK00F GP1UM27RK00F GP1UM272RK GP1UM287QK GP1UM281RK0F GP1UM262RK0F GP1UM260RK0F GP1UM281QK GP1UM27RK GP1UM277RK GP1UM28QK00F GP1UM261RK GP1UM267RK GP1UM26RK GP1UM271RK GP1UM282QK GP1UM28QK GP1UM28RK GP1UM267RK0F GP1UM287QK0F GP1UM287RK0F GP1UM280RK0F GP1UM270RK0F GP1UM280QK0F。
MC1201A资料

Advanced Brushless MotorControl ChipsetMC1231A MC1131ASupports 3-phase as well as 2-phase brushless motorsPerforms trajectory generation, servo loop closure, and commutationUltra-smooth sinusoidal commutation Open or closed loop operationSoftware and feature-compatible with other 1st generation PMD chipsets Available in 1 or 2 axis configurations 32-bit position, velocity, acceleration and jerk trajectory profile registersChoice of S-curve, trapezoidal, or contoured velocity profile modes Electronic GearingTwo travel-limit switches per axis Choice of PWM or DAC motor output signalsEasy-to-use packet-oriented command protocol FeaturesGeneral DescriptionThe MC1231A is a dedicated motion processor which functions as a complete chip-based motor controller. Packaged in a 2-IC chipset, this device performs trajectory generation, servo loop closure, and sinusoidal commutation. The chipset inputs incremental encoder signals and outputs PWM orDAC-compatible motor command signals. The MC1231A is available in a one, or a two-axis configuration.The MC1231A is functionally similar to other members ofPMD's 1st generation chipset family however it adds the ability to perform sinusoidal commutation of brushless motors. All of these devices provide sophisticated motion control capabilities allowing the creation of complex profile sequences with very low tracking errors.Both two and three-phase brushless motors are supported by the MC1231A. When used with two-phase brushless motors each phase is separated by 90 degrees. When used with 3-phase brushless motors each phase is separated by 120 degress. The commutation angle is continuously calculated using the encoder position. User-programmable commutation parameters allow a very wide range of encoders and motors to be controlled.The chipset is controlled by a host processor which interfaces with the chipset via an 8-bit, bi-directional port. Communications to/from the chipset consist of packet-oriented messages.The chipset is packaged in 2 68-pin PLCC packages. Both chips utilize CMOS technology and are powered by 5 volts.Doc. Rev. 10.05, Nov 1997Commutation WaveformsPhase APhase BPhase CPhase APhase B3-Phase Brushless2-Phase BrushlessTable of ContentsProduct Family Overview.......................................Page 3 Introduction...........................................................Page 3 Family Summary...................................................Page 3 Electrical Characteristics.......................................Page 4 Absolute Maximum Ratings..................................Page 4 Operating Ratings.................................................Page 4 DC Electrical Characteristics................................Page 5 AC Electrical Characteristics................................Page 5 I/O Timing Diagrams.............................................Page 7 Pinouts....................................................................Page 12 MC1231A, MC1131A............................................Page 12 Pin Descriptions....................................................Page 13 Theory of Operations.............................................Page 17 Operational Parameters.......................................Page 18 Trajectory Profile Generation................................Page 18S-curve Point to Point.......................................Page 19Trapezoidal Point to Point.................................Page 20Velocity Contouring...........................................Page 20Electronic Gear.................................................Page 21 Trajectory Control.................................................Page 21Halting the Trajectory.......................................Page 21Motion Complete Status...................................Page 22 Digital Servo Filtering...........................................Page 22Motor Bias........................................................Page 23Motor Limit........................................................Page 23 Parameter Loading & Updating............................Page 23Manual Update.................................................Page 24Breakpoints.......................................................Page 24External Breakpoints and Homing....................page25 Disabling Automatic Profile Update..................Page 25 Travel Limit Switches............................................Page 25 Motion Error Detection..........................................Page 26Recovering From a Motion Error......................Page 26 Servo Loop Control & Timing...............................Page 26 Host Communications..........................................Page 27Electrical Interface............................................Page 27Packet Format..................................................Page 27Packet Checksum.............................................Page 28Illegal Commands.............................................Page 28Command Errors..............................................Page 28Axis Addressing................................................Page 29 Axis Status............................................................Page 29Status Word......................................................Page 29Miscellaneous Mode Status Word.....................Page 29 Host Interrupts.......................................................Page 30 Encoder Position Feedback..................................Page 31 Encoder FIltering...............................................Page 31 High Speed Position Capture............................Page 31 Index Pulses and Commutation........................Page 31 Motor Outputs.......................................................Page 31 Motor Output Control.........................................Page 32 Sinusoidal Commutation.......................................Page 31 Commutation Waveforms..................................Page 33 Commutation Parameters.................................Page 33 Index Pulse Referencing...................................Page 33 Commutation Error Detection............................Page 34 Phase Initialization............................................Page 34 Phase Initialization Programming......................Page 35 Adjusting The Commutation Angle....................Page 36 Encoder Pre-Scalar...........................................Page 37 Velocity-Based Phase Advance........................Page 37 Phase Info Status Word....................................Page 37 Commutation Command Summary...................Page 38 Motor Output Configuration...............................Page 38 Motor Output Signal Interpretation....................Page 38 DAC16 Decoding...............................................Page 39 PWM Decoding.................................................Page 39 Host Commands.....................................................Page 40 Command Summary.............................................Page 40 Command Reference............................................Page 42 Axis Control.......................................................Page 42 Profile Generation.............................................Page 43 Digital Filter.......................................................Page 46 Parameter Update.............................................Page 49 Interrupt Processing..........................................Page 51 Status/Mode......................................................Page 52 Encoder.............................................................Page 53 Motor.................................................................Page 54 Miscellaneous...................................................Page 55 Commutation.....................................................Page 57 Application Notes...................................................Page 62 Interfacing to ISA bus............................................Page 62 PWM Motor Interface............................................Page 64 16-Bit Parallel DAC Motor interface......................Page 66Performance Motion Devices, Inc. does not assume any responsibility for use of any circuitry described in this manual, nor does it make any guarantee as to the accuracy of this manual. Performance Motion Devices, Inc. reserves the right to change the circuitry described in this manual, or the manual itself, at any time.The components described in this manual are not authorized for use in life-support systems without the express written permission of Performance Motion Devices, Inc..Product Family OverviewMC1401 series MC1231 series MC1241 series MC1451 series # of axes4, 2, or 1 2 or 1 2 or 14, 2, or 1 Motors Supported DC Servo Brushless Servo Stepper StepperEncoder Format Incremental (no dash version)and Parallel ('-P' version)Incremental Incremental Incremental*Output Format DC servo SinusoidallycommutatedMicrostepping Pulse and Direction S-curve profiling Yes Yes Yes YesElectronic gearing Yes Yes Yes YesOn-the-fly changes Yes Yes Yes Yes Limit switches Yes Yes Yes Yes PID & feedforward Yes Yes--PWM output Yes Yes Yes-DAC-compatible output Yes Yes Yes-Pulse & direction output---Yes Index & Home signal Yes Yes Yes Yes*Chipset p/n's MC1401A, MC1401A-P (4 axes)MC1201A, MC1201A-P (2 axes)MC1101A, MC1101A-P (1 axis)MC1231A (2 axes)MC1131A (1 axis)MC1241A (2 axes)MC1141A (1 axis)MC1451A, MC1451A-E (4 axes)MC1251A, MC1251A-E (2 axes)MC1151A, MC1151A-E (1 axis)Developer's Kit p/n's:DK1401A, DK1401A-P DK1231A DK1241A DK1451A * optional using third I.C. ('-E' version)IntroductionThis manual describes the operational characteristics of the MC1231A, and MC1131A Motion Processors. These devices are members of PMD's 1st generation motion processor family, which consists of 16 separate products organized into four groups.Each of these devices are complete chip-based motion controllers. They provide trajectory generation and related motion control functions. Depending on the type of motor controlled they provide servo loop closure, on-board commutation for brushless motors, and high speed pulse and direction outputs. Together these products provide a software-compatible family of dedicated motion processor chips which can handle a large variety of system configurations.Each of these chips utilize a similar architecture, consisting of a high-speed DSP (Digital Signal Processor) computation unit , along with an ASIC (Application Specific Integrated Circuit). The computation unit contains special on-board hardware such as a multiply instruction that makes it well suited for the task of servo control.Along with a similar hardware architecture these chips also share most software commands, so that software written for one chipset may be re-used with another, even though the type of motor may be different. This manual describes the operation of the MC1231A andMC1131A chipsets. For technical details on other members of PMD's 1st generation motion processors see the corresponding product manual.Family SummaryMC1401 series (MC1401A, MC1201A, MC1101A, MC1401A-P, MC1201A-P, MC1101A-P) - These chipsets take in incremental encoder signals (standard version) or parallel word encoder signals (-P version) and output a motor command in either PWM or DAC-compatible format. These chipsets come in 1, 2 or 4 axis versions and can be used with DC brushed motors, or brushless motors using external commutation.MC1231A series (MC1231A, MC1131A) - These chipsets take in incremental quadrature encoder signals and output sinusoidally commutated motor signals appropriate for driving brushless motors. They are available in one or two axis versions. Depending on the motor type they output two or three phased signals per axis in either PWM or DAC-compatible format.MC1241 series (MC1241A, MC1141A) - These chipsets provide internal microstepping generation for stepping motors. They are available in a one or a two-axis version. Two phased signals are output per axis in either PWM or DAC-compatible format. An incremental encoder signal can be input to confirm motor position.MC1451 series (MC1451A, MC1251A, MC1151A, MC1451A-E, MC1251A-E, MC1151A-E) - These chipsets provide very high speed pulse and direction signal output appropriate for driving step motor-based systems. They are available in a one, two, or four-axis version and are also available with quadrature encoder input.Each of these chipsets has an associated Chipset Developer's Kit available for it. For more information contact your PMD representative.Electrical CharacteristicsOverviewThe MC1231A consists of two 68 pin PLCC's both fabricated in CMOS. The Peripheral Input/Output IC (I/O chip) is responsible for interfacing to the host processor and to the position input encoders. The Command Processor IC (CP chip) is responsible for all host command, trajectory, servo, and commutation computations, as well as for outputting the PWM and DAC signals.The following figure shows a typical system block diagram, along with the pin connections between the I/O chip and the CP chip.Encoder(1-2 axis)Host Processor CPI/OData4-11I/OAddr0-3I/OWriteI/OCntrl0-3ClkOutAmplifier(1-2 axis) Motor(4 axis)Hall Sensors(1 - 2 axis)The CP and I/O chips function together as one integrated motion processor. The major components connected to the chip set are the Encoder (2, or 1 axes), (optionally) the motor Hall-sensors (2 or 1 axes), the motor amplifier (2, or 1 axes), and the host processor.The encoder signals are input to the I/O chip in quadrature format. Two signals encode the position, and an optional index signal contains a once-per-rotation locating signal.Hall sensors may be connected to the chipset to provide phase initialization information, although this is not required. Three Hall sensor signals are input per axis.The chipset's motor output signals are connected to the motor amplifier. Two types of output are provided; PWM (pulse width modulation), and DAC-compatible signals used with an external DAC (digital to analog converter). Because the output signals are commutated, more than one motor output signal will be output per axis. See Theory of Operations section on sinusoidal motor commutation for details.The host processor is interfaced via an 8-bit bi-directional bus and various control signals. Host communication is coordinated by a ready/busy signal, which indicates when communication is allowed.Interconnections between the two chips consist of a data bus and various control and synchronization signals. The following table summarizes the signals that must be interconnected for the chipset to function properly. For each listed signal the I/O chip pin on the left side of the table is directly connected to the pin to the right.I/O Chip SignalNameI/O ChipPinCP ChipSignal NameCP ChipPinCPData418Data450CPData55Data549CPData66Data646CPData77Data743CPData88Data840CPData917Data839CPData103Data1036CPData111Data1135CPAddr068I/OAddr028CPAddr127I/OAddr19CPAddr229I/OAddr26CPAddr312I/OAddr35CPCntr020I/OCntr016CPCntr136I/OCntr118CPCntr222I/OCntr268CPCntr363I/OCntr367CPWrite2I/OWrite15CPClk46ClkOut19For a complete description of all pins see the 'Pin Descriptions' section of this manual.Absolute Maximum RatingsUnless otherwise stated, all electrical specifications are for both the I/O and CP chips.Storage Temperature, Ts.....................-55 deg. C to +150 deg. C Supply Voltage, Vcc.............................-0.3 V to +7.0 VPower Dissipation, Pd..........................650 mW (I/O and CPcombined)Operating RatingsOperating Temperature, Ta.................0 deg. C to +70 deg. C Nominal Clock Frequency, Fclk...........25.0 MhzSupply Voltage, Vcc.............................4.75 V to 5.25 V* Industrial and Military operating ranges also available. Contact your PMD representative for more information.DC Electrical Characteristics(Vcc and Ta per operating ratings, Fclk = 25.0 Mhz)Symbol Parameter Min.Max.Units Conditions Vcc Supply Voltage 4.75 5.25VIdd Supply Current100mA open outputs Input VoltagesVih Logic 1 input voltage 2.0Vcc + 0.3VVil Logic 0 input voltage-0.30.8V3.0Vcc+0.3VVihclk Logic 1 voltage for clock pin(ClkIn)Vihreset Logic 1 voltage for reset pin4.0Vcc+0.3V(reset)Output VoltagesVoh Logic 1 Output Voltage 2.4V@CP Io = 300 uA@I/O Io = 4 mA Vol Logic 0 Output Voltage0.33V@CP Io = 2 mA@I/O Io = 4 mA Iout Tri-State output leakage current-2020uA0 < Vout < Vcc Iin Input current-5050uA0 < Vi < Vcc Iinclk Input current ClkIn-2020uA0 < Vi < VccAC Electrical Characteristics(see reference timing diagrams)(Vcc and Ta per operating ratings; Fclk = 25.0 Mhz)(~ character indicates active low signal)Timing Interval T#Min.Max.Units Encoder and Index Pulse TimingMotor-Phase Pulse Width T1 1.6uSDwell Time Per State T20.8uSIndex Pulse Setup and HoldT30uS (relative to Quad A and Quad B low)Reset TimingStable Power to Reset0.25SecReset Low Pulse Width 1.0uSClock TimingClock Frequency (Fclk) 6.725.6MhzClock Pulse Width T419.575 (note 2)nSClock Period T539149 (note 2)nSTiming Interval T#Min.Max.Units Command Byte Write Timing~HostSlct Hold Time T6152000 (note 3)nS~HostSlct Setup Time T710nSHostCmd Setup Time T810nSHost Cmd Hold Time T925nSHostRdy Delay Time T1370nS~HostWrite Pulse Width T1450nSWrite Data Setup Time T1535nSWrite Data Hold Time T1630nSData Word Read Timing~HostSlct Hold Time T6152000 (note 3)nS~HostSlct Setup Time T7 (read only)- 20nSHostCmd Setup Time T8 (read only)- 20nSHostCmd Hold Time T925nSRead Data Access Time T1050nSRead Data Hold Time T1110nS~HostRead high to HI-Z Time T1250nSHostRdy Delay Time T1370nSRead Recovery Time T1760nSData Word Write Timing~HostSlct Hold Time T6152000 (note 3)nS~HostSlct Setup Time T710nSHostCmd Setup Time T810nSHostCmd Hold Time T925nSHostRdy Delay Time T1370nS~HostWrite Pulse Width T1450nSWrite Data Setup Time T1535nSWrite Data Hold Time T1630nSWrite Recovery Time T1860nSDAC Interface TimingI/OAddr Stable to ~I/OWrite setup time T1935nS~I/OWrite Pulse Width T205695nSData Hold Time After ~I/OWrite T2117nSClkOut Low to I/OAddr stable T221040nSClkOut Low to ~I/OWrite Low T237592nSClkOut Low to Data Valid T2492nSClkOut Cycle Time T25160 typical (note 4)nSI/OAddr Stable to DACSlct High T2666nS~I/OWrite Low to DACSlct High T2744.5nSPWM Output TimingPWM Output Frequency24.5Khznote 1~HostSlct and HostCmd may optionally be de-asserted if setup and hold times are met.note 2Chip-set performance figures and timing information valid at Fclk = 25.0 only. For timing information & performance parameters at Fclk <25.0 Mhz, call PMD.note 3Two micro seconds maximum to release interface before chip set responds to commandnote 4ClkOut from CP is 1/4 frequency of ClkIn (CP chip).I/O Timing DiagramsThe following diagrams show the MC1231A electrical interface timing. T#' values are listed in the above timing chart.Quad A Quad B T1T1T2T2T3T3Index = ~A * ~B * ~IND~IndexQuadrature Encoder Input TimingClock TimingT4T4T5 ClkInT7T6T9T14T15T16T8Command Byte Write TIming~HostSlctHostCmd~HostWriteHostData0-7HostRdyT13Data Word Read TIming~HostSlctT7T8T17T6T9T13Note 1Note 1T11HostCmdHostData0-7HostRdy~HostReadT12T10High-ZHigh-ZHigh-ZHigh ByteLow ByteData Word Write TIming~HostSlctT7T8T18T6T9T15T15T14T14T13Note 1Note 1T16T16HostCmdHostData0-7HostRdy~HostWriteHigh ByteLow ByteDAC Interface TimingT25ClkOutT22T19I/OAddrT23T20~I/OWriteT24T21 Data 0-11,DACAddr0,1T27T26DACSlctPinouts19102627436044611910262743604461I/O(Top view)CP(Top view)MC1231A PinoutsCPCntrl2CPCntrl3HostCmd HostRdy HostRead HostWrite HostSlct HostIntrpt HostData0HostData1HostData2HostData3HostData4HostData5HostData6HostData7CPData4CPData5CPData6CPData7CPData8CPData9CPData10CPData11CPAddr0CPAddr128422413263092340351939341633465245291222036QuadA1QuadB1Index1Home1QuadA2QuadB2Index2Home2Hall1A Hall1B Hall1C Hall2A Hall2B Hall2C DACSlct CPClk I/OClkIn I/OClkOut CPAddr2CPAddr3CPWrite CPCntrl0CPCntrl12263413751474844506153656762646018567817316827VCC4, 21, 25, 38, 55GND14, 15, 32, 49, 54, 66I/OCPData0Data1Data2Data3Data4Data5Data6Data7Data8Data9Data10Data11I/OAddr0I/OAddr1I/OAddr2I/OAddr3I/OWrite PosLimit1PosLimit2NegLimit1NegLimit28721666530292419171618686764636261PWMMag1PWMMag2PWMMag3PWMMag4PWMMag5PWMMag6DAC16Addr0DAC16Addr1ClkIn ClkOut Reset I/OCntrl0I/OCntrl1I/OCntrl2I/OCntrl3DACLow0DACLow1DACLow2DACLow3605958575049464340393635289651552455144VCC4, 22, 33GND3, 34MC1131A PinoutsHostCmd HostRdy HostRead HostWrite HostSlct HostIntrpt HostData0HostData1HostData2HostData3HostData4HostData5HostData6HostData7CPData4CPData5CPData6CPData7CPData8CPData9CPData10CPData11284224134035193346524529122203622636827QuadA1QuadB1Index1Home1Hall1A Hall1B Hall1C DACSlct CPClk I/OClkIn I/OClkOut CPAddr2CPAddr3CPWrite CPCntrl0CPCntrl1CPCntrl2CPCntrl3CPAddr0CPAddr141375147484450615365676264601856781731VCC4, 21, 25, 38, 55GND 14, 15, 32, 49, 54, 66I/OCPData0Data1Data2Data3Data4Data5Data6Data7Data8Data9Data10Data11I/OAddr0I/OAddr1I/OAddr2I/OAddr3I/OWrite PosLimit1NegLimit187230292419171618686764636261PWMMag1PWMMag2PWMMag3DAC16Addr0DAC16Addr1ClkIn ClkOut Reset I/OCntrl0I/OCntrl1I/OCntrl2I/OCntrl3DACLow0DACLow1DACLow2DACLow360595857504946434039363528965155251VCC4, 22, 33GND3, 34Pin DescriptionsThe following tables provide pin descriptions for the MC1231-series chipsets.IC Pin Name Pin #Description/Functionality I/O Chip PinoutsI/O QuadA1QuadB1QuadA2QuadB228422630Quadrature A, B channels for axis 1 - 2 (input). Each of these 2 pairs of quadrature (A, B)signals provide the position feedback for an incremental encoder. When the encoder ismoving in the positive, or forward direction, the A signal leads the B signal by 90 degs.NOTE: Many encoders require a pull-up resistor on each of these signals to establish aproper high signal (check the encoder electrical specifications)NOTE: For MC1231A all 4 pins are valid. For MC1131A pins for axes 1 only are valid. Invalidaxis pins can be left unconnectedI/O~Index1~Index2249Index encoder signals for axis 1-2 (input). Each of these 2 signals indicate the index flagstate from the encoder. A valid index pulse is recognized by the chip set when the index flagtransitions low, followed by the corresponding A and B channels of the encoder transitioninglow. The index pulse is recognized at the later of the A or B transitions. If not used this signalmust be tied high.NOTE: For MC1231A both pins are valid. For MC1131A pins for axes 1 only are valid.Invalid axis pins can be left unconnected.I/O~Home1~Home21323Home signals for axis 1-2 (input). Each of these signals provide a general purpose input tothe hardware position capture mechanism. A valid home signal is recognized by the chipsetwhen the home flag transitions low. These signals have a similar function as the ~Indexsignals, but are not gated by the A and B encoder channels. For valid axis pins, If not used,this signal must be tied high. See below for valid pin definitions for the MC1231A andMC1131A.NOTE: For MC1231A both pins are valid. For MC1131A pins for axes 1 only are valid.Invalid axis pins can be left unconnected.I/O DACSlct33DAC Select (output). This signal is asserted high to select any of the available DAC outputchannels. For details on DAC decoding see description of DAC16Addr0-1 signals.I/O CPClk46I/O chip clock (input). This signal is connected directly to the ClkOut pin (CP chip) andprovides the clock signal for the I/O chip. The frequency of this signal is 1/4 the user-providedClkIn (CP chip) frequency.I/O I/OClkIn52Phase shifted clock (input). This signal must be connected to I/OClkOut (I/O chip), and inputsa phase shifted clock signal.I/O I/OClkOut45Phase shifted clock (output). This signal must be connected to I/OClkIn (I/O chip), andoutputs a phase shifted clock signal.I/O CPAddr0CPAddr1CPAddr2CPAddr368272912I/O chip to CP chip communication address (input). These 4 signals are connected to thecorresponding I/OAddr0-3 pins (CP chip), and together provide addressing signals tofacilitate CP to I/O chip communication.I/O~CPWrite2I/O chip to CP chip communication write (input). This signal is connected to the ~I/OWrite pin(CP chip) and provides a write strobe to facilitate CP to I/O chip communication.I/O CPCntrl0CPCntrl1CPCntrl2CPCntrl320362263I/O chip to CP chip communication control (mixed). These 4 signals are connected to thecorresponding I/OCntrl0-3 pins (CP chip), and provide control signals to facilitate CP to I/Ochip communication.I/O HostCmd41Host Port Command (input). This signal is asserted high to write a host command to the chipset. It is asserted low to read or write a host data word to the chipsetIC Pin Name Pin #Description/FunctionalityI/O HostRdy37Host Port Ready/Busy (output). This signal is used to synchronize communication betweenthe DSP and the host. HostRdy will go low (indicating host port busy) at the end of a hostcommand write or after the second byte of a data write or read. HostRdy will go high(indicating host port ready) when the command or data word has been processed and thechip set is ready for more I/O operations. All host port communications must be made withHostRdy high (indicating ready).Typical busy to ready cycle is 67.5 uSec, although it can be longer when host port traffic ishigh.I/O~HostRead51Host Port Read data (input). Used to indicate that a data word is being read from the chip set(low asserts read).I/O~HostWrite47Host Port Write data (input). Used to indicate that a data word or command is being written tothe chip set (low asserts write).I/O~HostSlct48Host Port Select (input). Used to select the host port for reading or writing operations (lowassertion selects port). ~HostSlct must remain inactive (high) when the host port is not in use. I/O~HostIntrpt44Host Interrupt (output). A low assertion on this pin indicates that a host interrupt conditionexists that may require special host action.I/O HostData0HostData1HostData2HostData3HostData4HostData5HostData6HostData75061536567626460Host Port Data 0-7 (bi-directional, tri-stated). These signals form the 8 bit host data port usedduring communication to/from the chip set. This port is controlled by ~HostSlct, ~HostWrite,~HostRead and HostCmd.I/O CPData4CPData5CPData6CPData7CPData8CPData9CPData10CPData111856781731I/O chip to CP chip data port (bi-directional). These 8 bits are connected to the correspondingData4-11 pins on the CP chip, and facilitate communication to/from the I/O and CP chips..I/O Hall1AHall1BHall1CHall2AHall2BHall2C 403519393416Hall Sensor A, B, and C commutation inputs for axis 1 and 2 (input). Each set of the threesignals for one axis (A, B and C) encodes 6 valid signal states as follows: A on, A and B on,B on, B andC on, C on, C and A on. An on state is defined as a high signal.NOTE: These signals should only be connected to Hall sensors that are mounted 120-degoffset from each other. Schemes which provide Hall signals 60-deg apart will not work.NOTE: For MC1231A all 6 pins are valid. For MC1131A pins for axis 1 only are valid. Invalidaxis pins can be left unconnected.I/O Vcc4, 21, 25, 38, 55I/O chip supply voltage pin. All of these pins must be connected to the supply voltage. Supplyvoltage = 4.75 to 5.25 VI/O GND14, 15, 32, 49, 54,66I/O chip ground pin. All of these pins must be connected to the power supply return.。
毛玛MC-1200系列极小型强壮边缘计算机说明书

MC-1200SeriesUltra-compact rugged edge computers with Intel®Core™i7processor,designed for IIoT, AI,and machine learning applicationsFeatures and Benefits•3Mini-PCIe sockets for Wi-Fi,3G,LTE,GPS,and mSATA expansion modules•7th Gen Intel®Core™processor(Kaby Lake U)•2built-in DDR4memory slots;total capacity up to32GB•Built-in TPM2.0module•Variety of interfaces:2serial ports,2Giga LANs,3USB3.0(type A)portsCertificationsIntroductionThe MC-1200Series computers are built around a7th Gen Intel®Celeron®or Intel®Core™i3,i5,or i7processor and come with1HDMI display port,3USB3.0ports,2gigabit LAN ports,and23-in-1RS-232/422/485serial ports.The MC-1200is equipped with a2.5”HDD/SSD slot and a built-in TPM2.0module.Additional value and convenience is provided through a modular design with three independent slots for flexible system integration and expansion. Users have the option to add a variety of different communications modules,including Wi-Fi,3G,LTE,GPS,and mSATA expansion modules.With UL Class1Division2compliance,the MC-1200is sure to deliver stable and reliable system operation for oil and gas applications.Class1 Division2(C1D2)is a certification issued to products that allow them to be used in potentially hazardous environments.Examples of hazardous work settings include locations where flammable or explosive gasses,certain chemicals,airborne fibers,or vapors could be excessive under abnormal circumstances.The MC-1200is designed to operate reliably in extreme conditions,such as continuous exposure to low or high temperatures,humidity,high vibration,and power surges,making them perfect for heavy industry,solar grid,water/wastewater,oil and gas,and transportation applications. Proactive Monitoring FunctionMoxa Proactive Monitoring is a small-footprint,resource-friendly,easy-to-use utility available with some Moxa computers to track a number of system parameters.You can view the current values for key parts by simply clicking on the icons corresponding to the parameters in a Windows-based user er-defined key part indicators(KPIs)are used to monitor the computer’s key parts.Visible and/or audio alerts are triggered automatically via relays and SNMP traps when these KPIs exceed their preset threshold values,making it extremely convenient for operators to avoid system downtime by setting up predictive maintenance tasks well in advance.The Proactive Monitoring tool is currently available with the following:•DA-820C Series•DA-720Series•MC-1200Series•MC-7400SeriesAppearanceSpecificationsComputerCPU MC-1220-KL7-T-S:Intel®Core™i7-7600U Processor(4M Cache,up to3.90GHz)MC-1220-KL5-T-S:Intel®Core™i5-7300U Processor(3M Cache,up to3.50GHz)MC-1220-KL1-T-S:Intel®Celeron®Processor3965U(2M Cache,2.20GHz)MC-1220-KL5-T:Intel®Core™i5-7300U Processor(3M Cache,up to3.50GHz) Storage Slot mSATA slots x1,SATA3.0,internal mini-PCIe socketSystem Memory Slot SODIMM DDR4slot x2,up to32GB max.Supported OS Linux Debian9,64-bit,kernel4.9(optional via CTOS)Windows10Enterprise LTSC180964-bit(optional via CTOS)Graphics Controller MC-1220-KL7-T-S:Intel®HD Graphics620MC-1220-KL5-T-S:Intel®HD Graphics620MC-1220-KL1-T-S:Intel®HD Graphics610MC-1220-KL5-T:Intel®HD Graphics620Computer InterfaceVideo Input HDMI x1,up to3840x2160resolution at30HzUSB3.0USB3.0hosts x3,type-A connectorsButtons Reset buttonSerial InterfaceConnector DB9maleSerial Standards RS-232/422/485(software selectable)Serial Ports2x RS-232/422/485Flow Control RTS/CTS,XON/XOFFBaudrate50bps to115.2kbpsESD Protection4kV contact,8kV airEthernet InterfaceMagnetic Isolation Protection 1.5kV(built-in)10/100/1000BaseT(X)Ports(RJ45connector)2LED IndicatorsSystem Power x1Serial2per port(Tx,Rx)Serial SignalsRS-232TxD,RxD,RTS,CTS,GNDRS-485-4w Tx+,Tx-,Rx+,Rx-,GNDRS-422Tx+,Tx-,Rx+,Rx-,GNDRS-485-2w Data+,Data-,GNDPhysical CharacteristicsInstallation Wall mounting(with optional kit),DIN-rail mounting Housing MetalDimensions134x60.4x120mm(5.28x2.38x4.72in)Weight Product only:1.40kg(0.63lb)DeclarationGreen Product RoHS,CRoHS,WEEEPower ParametersPower Button ON/OFF(rear panel)Reset buttonInput Voltage9to36VDCInput Current8A@9VDC,2A@36VDCPower Consumption72WEnvironmental LimitsOperating Temperature-40to70°C(-40to158°F)Storage Temperature-40to75°C(-40to167°F)Ambient Relative Humidity5to95%(non-condensing)Shock IEC60068-2-27Standards and CertificationsSafety UL60950-1,UL62368-1,EN60950-1,EN62368-1EMC EN55032/35,CISPR32,FCC Part15B Class A Hazardous Locations ATEX Zone2,IECEx Zone2,Class I Division2 ReliabilityAlert Tools Built-in RTC(real-time clock)with lithium battery backupMTBFTime510,913hrs Standards Telcordia (Bellcore),GBWarrantyWarranty Period3years Details See /warrantyPackage ContentsDevice1x MC-1200Series computer Installation Kit1x DIN-rail kit Documentation 1x quick installation guide1x warranty card DimensionsOrdering InformationModel Name CPU Memory TPM 2.0Optional OS Storage(mSATA)LAN/Serial Ports SSD/HDD Slots USB 3.0Ports Interface Expansion Operating TempMC-1220-KL7-T-S Intel®Core™i7-7600U8GB ✓16GB 2/2133x mPCIe -40to 70°C MC-1220-KL5-T-S Intel®Core™i5-7300U8GB ✓16GB 2/2133x mPCIe -40to 70°C MC-1220-KL1-T-S Intel®Celeron®3965U8GB ✓16GB 2/2133x mPCIe -40to 70°C MC-1220-KL5-T Intel®Core™i5-7300U 8GB –16GB 2/2133x mPCIe -40to 70°CAccessories(sold separately)Power AdaptersPWR-24250-DT-S1Desktop power supply(requires power cord),24VDC,2.5A,100to240VAC,0to40°C operatingtemperatureWi-Fi Wireless ModulesMC-1220-WLAN11-AC Wireless package for the MC-1200Series with WPEQ-261ACNI(BT)802.11ac/a/b/g/n Wi-Fi moduleand mPCIe moduleLTE Wireless ModulesMC-1220-LTE Cat4-EU Wireless package for the MC-1200Series with LE910C4-NF4G module and mPCIe module for the EUregionMC-1220-LTE Cat4-US Wireless package for the MC-1200Series with LE910C4-NF4G module and mPCIe moduleMC-1220-LTE Cat4-AP Wireless package for the MC-1200Series with LE910C4-NF4G module and mPCIe module for theAsia-Pacific region©Moxa Inc.All rights reserved.Updated Oct04,2022.This document and any portion thereof may not be reproduced or used in any manner whatsoever without the express written permission of Moxa Inc.Product specifications subject to change without notice.Visit our website for the most up-to-date product information.。
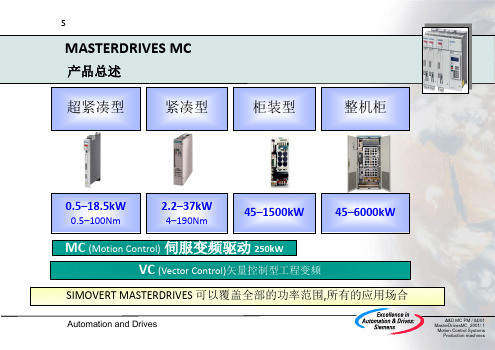
MasterDrivesMC_2001_chinese_formal
DC DC
M
M
M
M
M
M
M
M
单轴配置
多轴系统, 例如. 多轴系统, 例如. 3 轴系统有一台伺服 变频器带2 变频器带2台逆变器
整流装置加逆变器组成的多轴系统
结构紧凑, 结构紧凑, 价格可以接受的伺服产品
Automation and Drives
A&D MC PM / 04/0 MasterDrivesMC_2001/ Motion Control System Production machine
带制动控制电路的一体化伺服驱动( 带制动控制电路的一体化伺服驱动 整流加逆变) 此类型装置除自身驱动标称功率电机外还可以作为整流单元通过直流母 线带动总功率与之相等的逆变装置,且数目不限. 只是超过两个逆变装置 线带动总功率与之相等的逆变装置 时需外接24V电源 结构设计为多轴组合结构 5.5kW 以上装置带停车安全保护 以上装置带停车安全保护(选项) 可装入 300mm 深的电柜
共用直流母线结构可节省空间和降低成本 自带过流保险元件 所有逆变器可以带安全停车功能 整流单元 (RU) 带制动控制电路 多轴组合结构设计 OP1S 操作面板可以安装于共用整流单元上对逆变器进行监控 可安装于 300mm 深电柜
逆变器 输入电压 额定电流 2A 额定功率 宽度 高度 深 0.75kW 45mm 4A 1.5kW 6.1A 2.2kW DC 510–620V ± 15 % 10.2A 4.0kW 90mm 13,2A 5.5kW 17.5A 7.5kW 135mm 360mm 260mm at PMU or 220mm terminals mm 25.5A 11kW 34A 15kW 37.5A 18.5kW 41 15kW 90mm 整流单元 3 AC 380–480V 120A 50kW 135mm 230A 100kW 180mm
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 Operation at or near full rated power (especially >1W) involves consideration of mounting geometry (solder pad and trace area/thickness, etc.). Request FA2623 for suggested mounting pad layouts.2Extended resistance range available . Most sizes available down to 0.01Ω 1%. 3 Up to 25A available. 4 Dim. t on MC2512B is .094[2.4] maximum.TYPICAL PERFORMANCETHICK FILM CHIP RESISTORS AND JUMPERSMC SERIES 50mW (0201) to 3W (2040)ZC SERIES Zero-ohm chip (1A - 25A)Industry’s widest selection & lowest prices- 0.1Ω to 22M , 50mW to 3W, 0.25% to 5%, TC’s to 50ppm 0402, 0603, 0805, 1206 sizes heavily stocked in 1% & 5% (other sizes available from stock in many popular values) Option V: +175° operating temperature Option U: User-trimmable chips Option P: Increased pulse capabilityMilitary screening, custom values & TC, microwave design, etc.offering inherently low inductance, exceptional reliability and superior performance. Heavy plating with NO LEACH TMnickel barrier assures superb solderability and long shelf life. State-of-the-art production line enables the industry’s most precise accuracies (0.25% & 50ppm!)thereby replacing more costly thin-film chips in many applications.RCD offers low cost offshore assembly of SM and leaded PCB’s (refer to RCD’s Assembly Services p.114 for more information).LtWTPulse capability is dependent on res. value, waveform, repetition, etc.Chart is a general guide for Opt. P version, single or infrequent pulses,with peak voltage levels not exceeding 150V for 0402 & 0603 size, 300V for 0805, 400V for 1206 & 1210, 450V for 2010 & 2512. Max pulse wattage for standard parts (w/o Opt.P) is 50% less, max pulse voltage is 50V less. Increased pulse levels available. For improved performance and reliability, pulse derating factor is recommended (30-50% typ., refer to #R-42). Verify selection by evaluating under worst-case conditions.C R TD e p y C Z ,C M e g a t t a W g n i t a R 1C T d t S 2,C °/m p p .p y t eg n a R .s i se R l o T %5.0±2d r a d n a tS e g n a R .s i s e R l o T %1±2d r a d n a t Se g n a R .s i s e R l o T %5±2C M e g a t l o V g n i t a R 2C Z E P Y T r e p m u J 3s n o i s n e m i D ]m m [h c n I LWTt1020W50.00101ΩK 22o t ΩV52.x a M p m A 1m 05Ω.x a M 200.±420.]30.±6.0[200.±210.]30.±3.[200.±010.]30.±52.[200.±600.]50.±51.[002M 1o t K 1.22Ω01ΩM 1o t Ω0041.9-1ΩM 2.2-M 1.1,2040m e t i k c o t S W 360.00101ΩM 1o t ΩV05.x a M p m A 1m 05Ω.x a M 400.±040.1.±00.1[]400.±020.]1.±5.[400.±410.]1.±53.[400.±010.]1.±52.[00201ΩM 1o t Ω0041Ω67.9o t Ω1.9-1ΩM 7.4-M 1.1,3060m e t i k c o t S W 1.00101ΩM1o t 01ΩM 1o t ΩV05pm A 5.1.x a M m 05Ω.x a M 500.±160.]21.±55.1[400.±130.]1.±8.[600.±610.]51.±04.[600.±010.]51.±52.[00201ΩM 1o t Ω0041Ω67.9o t Ω1.9-1ΩM01-M 1.1,5080m e t i k c o t S W 521.00101ΩM1o t 01ΩM 1o t Ω15V0.x a M p m A 2m 05Ω.x a M 500.±970.]51.±0.2[600.±050.]51.±52.1[600.±020.]51.±05.[800.±610.]2.±4.[00201ΩM 1o t Ω00467.9-1.0ΩM 01-M 20.1,1.9-1.0ΩM02-M 1.1,6021m e t i k c o t S B 6021W 52.W 05.00101ΩM1o t 01ΩM 1o t ΩV002.x a M p m A 2m 05Ω.x a M 800.±621.]2.±2.3[600.±160.]51.±55.1[600.±420.]51.±16.[800.±020.]2.±15.[002M 6.5o t M 20.101ΩM 6.5o t Ω00467.9-1.0,ΩM 01-M 26.51.9-1.0ΩM22-M 2.6,0121W33.00101ΩM1o t 01ΩM 1o t ΩV 002.x a M p m A 3m 05Ω.x a M 800.±621.]2.±2.3[800.±890.]2.±5.2[800.±420.]2.±6.[010.±020.]52.±5.[002M 6.5o t M 20.101ΩM 6.5o t Ω00467.9-1.0,ΩM 01-M 26.51.9-1.0ΩM22-M 2.6,0102W 57.00101ΩM1o t 01ΩM 1o t ΩV 002(V 052)P .t p O .x a M p m A 3m 05Ω.x a M 800.±791.]2.±0.5[800.±201.]2.±6.2[800.±420.]2.±6.[010.±020.]52.±05.[002M 6.5o t M 20.101ΩM 6.5o t Ω00467.9-1.0,ΩM 01-M 26.51.9-1.0ΩM22-M 2.6,2152B 2152W 0.1W 0.200101ΩM1o t 01ΩM 1o t ΩV 05253(V 0)P .t p O .x a M p m A 4m 05Ω.x a M 10.±052.]52.±53.6[010.±521.]52.±2.3[800.±420.]2.±6.[210.±620..[63.±5]4002M 6.5o t M 20.101ΩM 6.5o t Ω00467.9-1.0,ΩM 01-M 26.51.9-1.0ΩM22-M 2.6,0402*0.3/0.200101ΩM 1o t ΩV053A/N 800.±102.]2.±1.5[800.±204.]2.±2.01[800.±420.]2.±6.[550.810.±]64.±4.1[00201ΩM 1o t Ω0041.9-1Ω)C °521+o t °55-(k c o h S l a m r e h T %2.0∆R )V d e t a r x 2E T N ,S 5,W x 5.2(d a o l r e v O %1∆R )C °55-(n o i t a r e p O .p m e T w o L %2.0∆R )s r h 001,C °521(e r u s o p x E .p m e T h g i H %5.0∆R t a e H r e d l o S o t e c n a t s i s e R %2.0∆R e c n a t s i s e R e r u t s i o M %5.0∆R ).s r h 0001(e f i L d a o L %0.1∆R .p m e T g n i t a r e p O )V .t p O C °571+(C°551+o t 55-)C °07e v o b a (g n i t a r eD C°/%81.1y b V &W e t a r e D Pulse DurationP e a k P o w e r (W a t t s )FA033F Sale of this product is in accordance with GF-061. Specifications subject to change without notice.Term.W is RoHS compliant & 260°C compatibleOptional TC RCD Type : MC or ZC Chip Size:Resis. Code (R100= .1Ω, 1R00=1Ω, 5% T 101=100Ω, 102=1K ΩTolerance Packaging Options: U, P Termination: RCD Components Inc, 520 E.Industrial Park Dr, Manchester, NH, USA 03109 Tel: 603-669-0054 Fax: 603-669-5455 Email:sales@RESISTORS CAP ACITORS C OILS DELAY LINES16元器件交易网。