Nontrivial fixed point in nonabelian models
Nonlinear Sigma Models in (1+2)-Dimensions and An Infinite Number of Conserved Currents
Γ is parametrized by σ ∈ [0, 2π ], so we parametrized Σ as follows. We scan Σ with loops passing through x0 and being parametrized by τ ∈ [0, 2π ] such that τ = 0 is the infinitesimal loop around x0 and τ = 2π is Γ. We want to identify a surface Σ in SΓ M with such a parametrization by τ ∈ [0, 2π ]. Here we introduce a gauge field Aµ and an anti-symmetric tensor field Bµν . Then a two-dimensional “holonomy” operator V : SΓ M → G is defined by the differential equation (8) where (9) T (B, A; τ ) ≡
arXiv:hep-th/9802105v1 14 Feb 1998
Nonlinear Sigma Models in (1 + 2)-Dimensions and An Infinite Number of Conserved Currents
Kazuyuki FUJII∗ and Tatsuo SUZUKI†
∂xµ ∂xν λ δx × ∂σ ∂τ (10) where Dλ Bµν ≡ ∂λ Bµν + [Aλ , Bµν ]. If the R.H.S. of (10) vanishes, then δV (2π ) = 0. Namely V becomes surfaceindependent or V becomes a local function on Σ. A comment is in order. The R.H.S. of (10) is identified with the curvature of a principal G-bundle on the loop space ΩG. See the appendix in [3]. Now we can construct conserved charges from V . This is the main story of [3]. Next we must study the vanishing conditions of the R.H.S. of (10). First we restrict a Lie group G. Let g be its Lie algebra. Here we assume g is non-semisimple. If we set p be the radical of g, then g is decomposed into g = h ⊕ p by the Levi’s theorem [4]. Now we assume (11) Aµ ∈ g and B µν ∈ p. dxµ ν δx ] = 0. dσ −[T (B, A; τ ),
Critical curves of the non-Newtonian polytropic filtration equations coupled with nonlinear
Critical curves of the non-Newtonian polytropic filtration equations coupled with nonlinear boundary conditions
pi k k Then a series of standard computations give that det A = i =1 (m i + 1) − i =1 ( pi −1 qi ). We shall see that det A = 0 is the critical global existence curve. Next, let (α1 , α2 , . . . , αk )T be the solution of the following linear algebraic system:
3202
Z. Cui / Nonlinear Analysis 68 (2008) 3201–3208
where qi > 0, k ≥ 1 and u k +1 := u 1 . We consider the initial data, u i (x , 0) = u i 0 (x ) (i = 1, 2, . . . , k ), x > 0, (1.3)
(1.1)
where m i ≥ 1, pi ≥ 2. The particular feature of Eq. (1.1) is their power- and gradient-dependent diffusivity. Such equations (and their N -dimensional version) arise in some physical models such as population dynamics, chemical reactions, heat transfer, and so on. In particular, Eq. (1.1) may be used to describe the nonstationary flow in a porous medium of fluids with a power dependence of the tangential stress on the velocity of displacement under polytropic conditions. In this case, the expressions in Eq. (1.1) are called the non-Newtonian polytropic filtration equations, which have been intensively studied (see [5,10,12,15] and references therein). These equations are complemented with nonlinear coupled boundary conditions −
管制员OPI问题汇总
民航管制员OPI面试问题汇总同批次阅卷时,若两份录音答案完全一致,被挂概率很高。
故该汇总答案大部分仅提供核心词汇句型,以及逻辑框架,避免考生所背答案完全一致。
希望大家日常根据框架和单词,多做自我发挥练习,尤其是报考人工OPI的伙伴。
本汇总集中了新老OPI中疑难题,排除了warm up和简单内容1.How much do you know about PBN?……learn about PBN from books and trainings……it is short for perform ance based navigation……it is a advanced concept in civil aviation……the operational criteria of PBN depends on the accuracy of navigation……2.Could you tell something about the advantages of PBN?……lots of advantages compared with the old navigational method…………cut off the excessive economy cost…………allow for more efficient use of airspace…………meet the noise abatement procedure…………improve the fuel efficiency……3.Do you have any PBN procedures in your area?Yes……there are……international flight routes with PBN procedures……however, the design of the procedure is not efficient as we expected……it is the exact copy of the original procedure……as so far……do not improve efficient use of airspace……do not expedite the air flow4. What is the difference between Non-precision approach and precision approach?……learn some expertise concerning Non-precision approach and precision approach from relevant material. There are many differences between them.Precision approach:vertical guidance, horizontal guidance……Non-precision approach:does not have……In addition……The minimum criteria of Non-precision approach:MDA, cloud celling , and visibility.……the minimum criteria of precision approach :DA and RVR……DA is short for decision altitude. At this altitude, if the pilot can establish visual reference, he will continue approach; otherwise he must commence missed approach without hesitation.MDA is short for minimum descent altitude. At this altitude, if the pilot can n ot establish visual reference, he must maintain present level until reaching the specific point; then he can execute missed approach.5. Since the precision approach is advanced, why do some airports use non-precision approach as well?………especially small airports.Many reasons contribute to it.One of my classmates works at an small airport that also uses Non-precision approach.He told me that the huge economy cost of precision approach is one of the reasons.It is widely known to us that VOR/DME, or NDB is much cheaper than ILS.In addition , the meteorological condition of that airport is always CAVOK.The MDA, cloud celling, and visibility ……Besides, the number of flight in this airport is only ……all day.Therefore, the airport authority believes that there is no need ……6. If the pilot insists on commencing Non-precision approach in the marginal weather condition, what should you do ?There are many steps that…………inquire of the meteorological forecast unit about weather trend.……inform the pilot of the details.……tell our supervisor and relevant units ,such as……, about the adequate information, especially the pilot's intention.the captain has the final say about decision regarding flight safety.……if the pilot continue insisting on Non-precision approach, we must issue the clearance.In my eyes……each airline has its own regulations involving such event.different companies have different criteria.the responsibility of controller is to provide adequate information for pilots.7. Do you know what is RVSM ?……is short for " Reduced Vertical Separation Minimum "the range……from 8900 meters to 12500 metersmoreov er, the vertical separation ……600 meters to 300 meters8.What would you do if a non-RVSM aircraft enters RVSM airspace?tell a storya military A/C ……IL76……have not the qualification of RVSMbut its assigned level ……9500 meters…………provide ……600 meters or above……inform the adjacent control unit…………keep close watch……9. Why should RVSM be carried out ?as of now, the surging number of A/C ……limited capacity of airspace ……long-standing problemwith the development of technology……accuracy of height-keeping ……RVSM is the effictive method to sort out ……on one hand, ……improve the capacity of airspace……on the other hand, ……expedite air flow……10. Do you know what is CDM?……stands for " Collaborate Decision Making System "……advanced system…………specific FAA program…………cutting-edge technology…………widely used in many control units……recently, ……put into use ……in our unit11 .Could you list some benefits of CDM ?as you know, our unit do not have CDMtherefore, I do not have a good knowledge of itbut ……learn from some relevant material……improve the overall efficiency of airport operations……cut down the excessive traffic delay caused by multiple reasons……relieve the workload of air traffic management units……has a strong foot in accelerating steps of automatic……12.What does ATIS consist of?……Automatic Terminal Information Services…………continuous broadcast facility…………weather information,including temperature, dew point, wind direction, visibility, tye of precipitation……runway in-userunway lightingground activitieswork in progressunserviceable equipment……13. Will the artificial intelligence be capable of replacing the air traffic controllers? Why?……cutting-edge technology……many people take it for granted that……. However, I don't think so.AI has lots of advantages compared with human.Such as:……cut much salary cost ;……complete task without any minor mistakes;……can not be badly affected by fatigue .In my eyes, I think the role of controllers would change if AI was involved in ATC.……may be surveillance and help update the program of AI.especially, when unexpected abnormal occurrence happen……Thus, I don't think AI will take the place of controllers.14.What affect the growth of civil aviation in China and the development of air traffic controllers?According to recent investigations,there are many factors that limit ……Most of them are long-standing problems.the national airspace is controlled by the military leaving a very small portion for civil aviationthe separation standard is excessive partly due to management and partly due to equipment limitation……lack of studying and communication chances with…….……contributes to the limited horizon.……badly affected by fatigue and stress.……always sleeping and playing handset games after work……no interest in the latest ATC technology.many leaders regard controllers as machine.……take it for granted that the detailed and complicate regulations could rule all the actions of controllers.15. Have you ever encountered the parachute jumping or dropping activity in your work?no, ……but , ……heard of it from my friend who works at……(tell a story)one day, when he was a trainee controller,……the airforce dropping activity was in progress in……the flight level 9500 or below was forbidden……all the A/C should deviate 10NM from the assigned route when passing…………do their utmost to complete ……16. Do you think dropping activity would jeopardize the scheduled flights' safety?of course,……my friend told me a story involving dropping activity ……he was in charge of coordination positionthe flight level 8900 or below was forbidden due to airforce dropping activity……both of my friend and his partner forgot the aircraft occupying 8100 meters……luckily, the dropping activity was finished in advanceotherwise, it was very likely that the carelessness would contribute to a tragedy.……there is no margin for error in our work17. Is there any regulations regarding dealing with general aircraft activity in your unit? What are they?of course,……before approval of the general aircraft,……have relevant document and the permission from militarywhen general aircraft activity is in progress,……have a good knowledge of its flight level, working area, end time……keep close watch …………sort out potential conflicts between scheduled flight and general aircraftwhen the activity is completed,military should be notified of the end timesupervisor should take the details on note book18. Have you ever encountered or heard of the pilot's temporary disability ?I have not …….m aybe, with the increasing experience, I will ……h owever, I have heard of it from my friend who works in…….and he told me about some expertise regarding it19 . What may the pilot's temporary disability result in?it is widely known to us that…… very likely results in lots of terrible accidents.…… miserable tragedy.the pilots have final say about decision regarding flights' safety.so when the pilots suffered temporary disability, the aircraft would lose the soul on board. ……can not comply with the instructions of ATC,…… can not control the flight's instruments .there is great potential risk that……accident.therefore, it is a challenge for…….20 .If the pilots sustain temporary disability, what should you do as a controller?……take lots of steps.the accurate answer to this question depends on current situation.I prefer to cite one example that my friend told me.……the captain fainted on board.…… intended to land at the nearest airport.…… ask the copilot "which medical assistance do you need?" .…… told the related departments about the detailed information.…… order the other conflict flights to give way to the emergency aircraft.……try our best to meet the pilots' requirments and provide clean airway for them.21. Have you ever received the pilots' report of unlawful interference in cockpit or cabin?no…………heard of it from my classmate who works at ……he was on duty…………a passenger suspected with mental disease attacked flight attendants……use a pencil as weapon…………7500…………request to land at the neareast airport……request police and first-aid upon arrival……smooth out……22. What may cause the unlawful interference in cockpit or cabin?……pose danger to flight safety……pose stress to flight crew and controllers……the detailed answers depend on current situation……in cabin……passengers or flight attendants get hurt……in cockpit……difficult to control the A/C……if situation deteriorated, miserable tragedy would happen23. Which action would you take if unlawful interference on board happened?……many steps need to take……when……ask pilot’s intention……it is often said that the pilots intend to land as soon as possible……inform supervisor and relevant units about detailed information……order other A/C which ……give way to …………if ……smooth out, ……ask whether there are injured people on board……inquire pilot……medical or police assistance24. What should you do when an aircraft contacted with you, but you couldn't find the radar label on radar screen?………should take some steps to sort out the problem.……prefer to share my experience regarding it.one day , I was in charge of control position. There were many aircrafts in the area.…… firstly established contact with me, and the pilot told me his callsign was …………could not pick up the radar label on radar screen.……suspected that there was something wrong with its transponder.……asked the pilot to check the transponder and press SPI for indentification.…… did not work.……ordered him to change the other transponder.……informed the radar unit of the details……check our radar equipment.…… proved that the aircraft transponder malfunctioned.Most importantly, I should provide procedural separation between this aircraft and the other aircraft.25. Do you know what is the general flight ?……include many kindsflight training, aerial photography, electricity line checking, air show and son onin recent years, lots of policy regarding general flight ……carry outwith development of economy,……will become more and more26. When the general flight has potential risk with the scheduled flight , what should you do ?……many measures must be taken…………require the general flight to return to land…………order ……to give way to the scheduled flight……inform ……and ……of the traffic information……keep close watch…………if not,……TCAS alert27. Could you name some dangerous goods that can not be taken on board?……are plentifulliqui d……posionous, radioactive or explosive thingsmatches, lighter, weaponskinds……continue to increase28 .Have you ever encountered dangerous goods on board?I have not ……, but have heard of such case from …………a military A/C, carring some special liquid…………in case of sth. unexpected……intend to maintain 8100 meters or below…………instruct the other A/C to climb or descend to give way…………meet pilots' requirement……tell the adjacent units about the detailed information……29. Could you tell me something about the airspace structure in your unit?……have a good knowledge of our airspace structure.…… domestic flight routes, and …… international flight routes.Our airspace is divided into ……. , different sectors have different characteristics.The most complex sector is……,because it contains lots of conflicts between take-off and landing flights.Most importantly, the fourth sector does not have the parallel flight routes.therefore, it is a challenge for our controllers.In order to expedite the air flow and cut off the potential risk ,the modification of our airspace structure is taken into account recently.30. How to optimize the airspace under your control? Can you give some suggestions?this question is so complexI prefer to share my suggestion, although it may not be correct……establish more parallel flight routes……divide the busiest control sector into two sectors……change the routes that are adjacent to the military area……establish more holding area31. What factors should you take into consideration before issuing holding instructions? ……each control unit has series of regulation about it.In our operation manual, there are three factors that we must take into consideration. ……ensure there is not potential conflict between ………… inquiring the fuel endurance……some widely known civil aviation tragedies resulted from fuel exhaustion during holding. …… shall apply to military department for the holding area before issuing instructions. After all , we shall not go against the operation manual ,and make the holding orderly and smoothly.32. What should you do when you encountered the traffic congestion?…… a long-standing problem.With the surging number of aircraft, traffic congestion is a big challenge for us.…… should take the following steps to sort out the problem.…… request the supervisor to issue ………… should use various methods to tackle the conflicts of flights,such as holding , short-cut, adjusting airspeed and so on.keeping composed and cool-headed is of vital importance…… suffer traffic congestion ,……suffer too much pressure.Moreover, any lapse can results in accident33. Could you tell me what is human factor?Yes……,As we know, human error is safety's enemy.Human errors include "error , omission, oversight ".Each of them can adversely affect flights' safety.……any lapse in controllers' daily work would contribute to miserable tragedies.34. Could you give me some examples of human error?……cause lots of unsafe events , even accidents.Many widely known civil aviation tragedies result from human error.(tell a story)One day , I was in charge of control position.There were ten aircrafts in my area.Moreover, all of them are take-off and landing flights. Many conflicts existed.Suddenly, ……intend to climb to 8900m from 8100m due to severe turbulence.I cleared him to climb without hesitation .However, I forgot the opposite traffic which occupied 8400m.Luckily, I found the potential near-miss in good time.And I carried out traffic avoidance procedure as soon as possible.At last, the separation met the minimum criteria.Although human error is a long-standing problem , I think we can overcome it. 35. What should you do to reduce the risk of human error?According to my expertise,……many methods to…….……have series of regulations regarding how to avoid human error.……double-check is an effective method.……ask yourself whether the instruction is correct for the second time.……before you pass your message,you must get your partner's agreement , who is in charge of coordination.After issuing your instruction, you shall aslo listen pilots' read-back carefullyin order to ensure make youself understood.In a word, we must develop good work habits.In China, most of control units use punishment as a measure,hoping that controllers will not make similar mistakes in future.I don't think it is a very effective method, although it has been used for years.36. As a controller, how do you deal with fatigue?……many step can be taken to …………p lay basketball……watch movie with …………chat with colleagues…………have a good sleep……read a interesting book……cut off excessive stress……37. What should you do if there are similar callsigns in your airspace?……the similar callsign adversely affects the flight safety.…… long-standing problemMany steps should be taken…………tell pilots that there are …………ask pilots to pay more attention……press the strong intonation upon the different letter or digitalbefore issuing instructions, ……double-checking…………listen readback carefully……38. What is RNAV? What is the difference between RNAV and conventional navigation?……stands for Regional Navigation.……cutting-edge technology application……use GPS to provide navigation functions.…… uses satellite- based signal. ……doesn't require a land-based station.on the contrary,…………would improve the capacity of airspace……expedite air flow39. What is the difference between emergency fuel and minimum fuel?…… means its fuel is not so adequate to make much maneuvering,but it can land normally.While ……implies no more delay can be accepted.Its endurance time is below 30min.……need priority or immediate landing,otherwise it will have the danger to crash due to fuel shortage.Therefore, …… is more urgent than …….40. Why is the fuel quantity of the flight which declares minimum fuel checked after landing?Because minimum fuel is a urgent situation.Once the pilot declares minimum fuel,all control units along its airway will pay much attention on it.And other aircraft will give way to it.Therefore, …… to verify whether their claim is true,just in case the crew falsely declare minimum fuel or do this for their own benefit.41. What may lead to endurance problem?……many factors can contribute to …………miscalculation of fuel ……when dispatchers …………hold for a long time due to flow control……fuel leakage42. Could you tell me something about TRM?……is short for team resource management…… the supervisor should utilize all the resource,including controllers, equipment and environment,to ensure the flight safety and improve efficiency.43. What should the supervisor do to commence TRM?……hub of TRM…… manage his team members ………… is responsible for all his management decision.After receiving the instruction from the senior leaders,the supervisor has to carry out the instruction without complaintand explain the reasons of the measurement to his team-members.…… assign the appropriate controllers to do the job with a suitable co-ordinator,bearing in the mind the personal conflict in the pairing.……maintain a good team spirit…… provide counseling to team members in times of personal difficulties.44. Do you think TRM is necessary? Why?of course……recent investigations reveal:……reduce the risk of human error……improve the efficiency of work……team-work spiritwith the development of ATC,……more and more important……leaders shall do their utmost ……45. If your controllers are arguing, as a supervisor, what should you do ?I will stop the argument,try separating their working position to avoid further trouble.Then, I will try to understand what happened, and let them focus on the job.After work, I will have a briefing,try to find a way to stop this problem from happening again.46. Do you know what is aircraft breakdown?of course…………means that there is a system failureelectrical system, mechanical system, hydraulic system ……for pilot, ……challenge……for controller, ……great pressure……47. As a controller, what should you do when you experience aircraft breakdown?……answer depends on the reason which resulted in ……for example, if the hydraulic system failed and the landing gear could not extend…………notify relevant units including…………low pass……visual check……instruct the other A/C to hold …………do our utmost to meet pilots' requirement……48.Do you know the checklist? What is the use of checklist?Of course, I have a good knowledge of checklist.When I was a trainee controller, I had learnt about it.The use of checklist has been wrote into our operation manualThe checklist in our unit has two kinds.The one is used in the shifting of duty,the other one is used in handling abnormal situation,such as radio failure, depressurization and so on.The message in the checklist contains the most important steps that we shall take or check. It is an effective method to avoid ' error, omission, oversight' in our daily work , especially in the shifting of duty.49. When should low- pass be carried out?it is widely known to us …… emergency methodespecially landing gear(undercarriage)……not extended……hydraulic problem or electrical system malfunction……visual check …… utilize gravity to extend……useful method to sort out ……50. What shall controllers do when low-pass is in progress?when ……controller shall exert lots of procedures to safeguard……firstly, ……close observation ……tell flight crew about accurate information……secondly,……inform A/P authority and related departments of detailed information……thirdly, ……order other A/C which plan to land to hold ……or divert to ……captain has the final say about decision regarding flight safety, ……51. Do you know which assistance controllers can provide during belly landing? during belly landing , controller's assistance will be crucial to the emergency A/CMost importantly, ……gather some significant information,……number of people, the damage position of A/C, whether fire spread over……then, order the other approach A/C to divert to ……give way to the emergency A/C……lastly, do our utmost to meet pilots' requirements,……foamed carpet……relay detailed and accurate information to ……as a controller , keeping composed and cool-headed is important ……52. If one flight enters a controlled airspace without your clearance, what should you do to solve the problem?First, I will verify this situation with the pilot, confirm his intention.If he tries to detour bad weather or encounters an emergency without timely report,I will give him convenience as I could.If he just misunderstands the instruction,I will vector him to the right route as soon as possible.53. What consequences would there be if you didn’t realize the mistakes you made in a clearance?After the clearance is delivered,the pilot will read back the safety-critical information in the clearance.If I can detect the mistake during hearback, I can still correct the mistake.However, if the mistake goes undetected, the pilot may engage in a wrong maneuver,resulting in traffic conflicts or even mid-air collision.54. As a controller, how can you ensure the clearances you issue to the flight crew are proper and correct?Most important of all, get focused when speaking and avoid slip of the tongue.Second, have the instructions in mind before you say.Besides, enhance the proficiency of radio telephony.Also, check your instruction by listening to the read back carefully.In a word, this requires us to form a good working habit.55. What is the separation minima for radar control or procedure control in your control area?In Approach unit, our horizontal radar separation minimum is 10km,which is larger than 6km regulated by CAAC.Also, it should meet the wake turbulence separation standard.The horizontal separation minimum for procedure control is 10min.And the vertical separation minimum in both control methods is 300m.But in our control area, we call it “dynamic300m”, and we usually use 600m for safety redundancy.56. When you discover the risk of air miss between two aircraft, what should you do immediately to avoid near-miss?If the situation is not so urgent,I will ask one of the aircraft to change its altitude before the condition gets worse.But if the two aircraft have been too close to each other,I will instruct both of them to turn right immediately, assuming they are in opposite directions.At the same time, ask them to climb or descend according to their present altitude.57. What personality should an air traffic controller have when dealing with abnormal or emergency situations?In my opinion,the most important personality for dealing with emergency situations is the ability to stay calm.A controller should never panick no matter what happens.Otherwise, he is likely to make the wrong judgement and the wrong decision.58. Have you ever had trouble in communicating with foreign pilots when dealing with abnormal situations? If yes, how did you overcome the trouble to ensure flight safety?Yes. When abnormal situation occurs,pilots are likely to use plain language to describe the situation on board.This makes it difficult to understand especially when they speak fast.In order to ensure good communication,we could ask pilots to use standard phrases and expressions,and try to speak a little bit slowly.In addition, we should get to know some common abnormal situationsand improve our comprehensive English skills,so that we can communicate better with pilots.59. After a long delay on the ground because of flow control, pilots are likely to be anxious, how do you deal with their complaints and quarrels on your frequency?On the one hand,the controller should show understanding about the pilots’ situationand patiently explain the causes for flow control.On the other hand, the controller should not be too soft.Otherwise, the pilots would get the upper hand,and the situation might get out of control.60. What information should an air traffic controller relay to other aircraft flight crew before fuel dumping begins?Before fuel dumping begins,the controller should advise the flight crews of other aircraft about the trackand altitude of the fuel dumping aircraftand the estimated time for commencing and completing fuel dumping.61. How would fuel dumping affect other aircraft near the fuel dumping area?If other aircraft are too close to the fuel dumping area,the fuselage is likely to becontaminated by the fuel.The more serious consequence is the fuel might be ingested by enginesand causes engine fire even losing both engines.Besides, if the fuel adheres to some measuring instruments outside of the fuselage,it may influence the accuracy of those instruments.62. Have you ever received any bomb threat training in a simulator?In simulator training, there was an exercise about bomb threat.An aircraft had lined up and was ready for takeoffwhen the controller received an anonymous phone call about a bomb threat.The controller had to handle the situation according to the procedures for bomb threat.63. In your opinion, what are some important pieces of information you should gather when a bomb threat occurs?The controller should gather information aboutthe pilot’s intention,the number of people on boardand whether there are any hazardous goods on board.If possible, the controller should learn about the type, location and description of the bomb.64. If the flight with the bomb threat is going to divert to your airport, how would you handle it?。
Non-Linear Dimensionality Reduction

David DeMers&Garrison CottrellDept.of Computer Science&Engr.,0114Institute for Neural ComputationUniversity of California,San Diego9500Gilman Dr.La Jolla,CA,92093-0114AbstractA method for creating a non–linear encoder–decoder for multidimensional datawith compact representations is presented.The commonly used technique ofautoassociation is extended to allow non–linear representations,and an objec-tive function which penalizes activations of individual hidden units is shownto result in minimum dimensional encodings with respect to allowable error inreconstruction.1INTRODUCTIONReducing dimensionality of data with minimal information loss is important for feature extraction,compact coding and computational efficiency.The data can be tranformed into“good”representations for further processing,constraints among feature variables may be identified,and redundancy eliminated.Many algorithms are exponential in the dimensionality of the input,thus even reduction by a single dimension may provide valuable computational savings.Autoassociating feedforward networks with one hidden layer have been shown to extract the principal components of the data(Baldi&Hornik,1988).Such networks have been used to extract features and develop compact encodings of the data(Cottrell,Munro& Zipser,1989).Principal Components Analysis projects the data into a linear subspaceHidden layer‘‘bottleneck’’InputOutputEncoding layerDecoding layerAuto-associatorNon-Linear‘‘Principal Components’’ NetFigure 1:A network capable of non–linear lower dimensional representations of data.with minimum information loss,by multiplying the data by the eigenvectors of the sample covariance matrix.By examining the magnitude of the corresponding eigenvalues one can estimate the minimum dimensionality of the space into which the data may be projected and estimate the loss.However,if the data lie on a non–linear submanifold of the feature space,then Principal Components will overestimate the dimensionality.For example,the covariance matrix of data sampled from a helix in 3will have full–rank and thus three principal components.However,the helix is a one–dimensional manifold and can be (smoothly)parameterized with a single number.The addition of hidden layers between the inputs and the representation layer,and between the representation layer and the outputs provides a network which is capable of learning non–linear representations (Kramer,1991;Oja,1991;Usui,Nakauchi &Nakano,1991).Such networks can perform the non–linear analogue to Principal Components Analysis,and extract “principal manifolds”.Figure 1shows the basic structure of such a network.However,the dimensionality of the representation layer is problematic.Ideally,the dimen-sionality of the encoding (and hence the number of representation units needed)would be determined from the data.We propose a pruning method for determining the dimensionality of the representation.A greedy algorithm which successively eliminates representation units by penalizing variances results in encodings of minimal dimensionality with respect to the allowable reconstruction error.The algorithm therefore performs non–linear dimensionality reduction (NLDR).2DIMENSIONALITY ESTIMATION BY REGULARIZATION The a priori assignment of the number of units for the representation layer is problematic. In order to achieve maximum data compression,this number should be as small as possible; however,one also wants to preserve the information in the data and thus encode the data with minimum error.If the intrinsic dimensionality is not known ahead of time(as is typical), some method to estimate the dimensionality is desired.Minimization of the variance of a representation unit will essentially squeeze the variance of the data into the other hidden units.Repeated minimization results in increasingly lower–dimensional representation. More formally,let the dimensionality of the raw data be.We wish tofind and its approximate inverse such that1where.Let denote the–dimensional vector whose elements are the univalued functions which make up.If one of the component functions is always constant,it is not contributingto the autoassociation and can be eliminated,yielding a function with1components.A constant value for means that the variance of over the data is zero.We add a regularization term to the objective function penalizing the variance of one of the representation units.If the variance can be driven to near zero while simultaneously achieving a target error in the primary task of autoassociation,then the unit being penalized can be pruned.LetΣ1net net2where net is the net input to the unit given the th training pattern,net is the activation of the th hidden unit in the representation layer(the one being penalized)and E is the expectation operator.For notational clarity, the superscripts will be suppressed hereafter.can be estimated as¯,the mean activation of over all patterns in the training data.net1There is no reason to suppose that the encoding and decoding layers must be of the same size. In fact,it may be that two encoding or decoding layers will provide superior performance.For the helix example,the decoder had two hidden layers and linear connections from the representation to the output,while the encoder had a single layer.Kramer(1991)uses information theoretic measures for choosing the size of the encoding and decoding layers;however,only afixed representation layer and equal encoding and decoding layers are used.2Unbounded weights will allow the same amount of information to pass through the layer with arbitrarily small variance and using arbitrarily large weights.Therefore the weights in the network must be bounded.Weight vectors with magnitudes larger than10are renormalized after each epoch.000.250.50.7510.20.40.60.800.250.50.7510.110.120.130.140.150.160.170.180.190.20.210.220.230.240.250.260.270.280.290.30.310.320.330.340.350.360.370.380.390.40.410.420.430.440.450.460.470.480.490.50.510.520.530.540.550.560.570.580.590.60.610.620.630.640.650.660.670.680.690.70.710.720.730.740.750.760.770.780.790.80.810.820.830.840.850.860.870.880.890.90.91Figure 2:The original 3–D helix data plus reconstruction from a single parameter encoding.3RESULTSWe applied this method to several problems:1.a closed 1–D manifold in 3.2.a 1–D helix in 3.3.Time series data generated from the Mackey–Glass delay–differential equation.4.16064by 64pixel,8-bit grayscale face images.A number of parameter values must be chosen;error threshold,maximum magnitude of weights,value of when increased,and when to “give up”training.For these experiments,they were chosen by hand;however,reasonable values can be selected such that the method can be automated.3.1Static Mappings:Circle and HelixThe first problem is interesting because it is known that there is no diffeomorphism from the circle to the unit interval.Thus (smooth)single parameter encodings cannot cover the entire circle,though the region of the circle left unparameterized can be made arbitrarily small.Depending on initial conditions,our technique found one of three different solutions.Some simulations resulted in a two–dimensional representation with the encodings lying on a circle in 2.This is a failure to reduce the dimensionality.The other solutions were both 1–D representations;one “wrapping”the unit interval around the circle,the other “splitting”the interval into two pieces.The initial architecture consisted of a single 8-unit encoding layer and two 8-unit decoding layers.was set to 0.01,∆to 0.1,and the error threshold,,to 0.001.The helix problem is interesting because the data appears to be three–dimensional to PCA.NLDR consistently finds an invertible one–dimensional representation of the data.Figure 200.10.20.30.40.50.60.70.80.91200220240260280300320340360380400Signal Reconstructed signal, 3D encoding Reconstructed signal, 2D encoding Figure 3:Data from the Mackey–Glass delay–differential equation with 17,correlation dimension 2.1,and the reconstructed signal encoded in two and three dimensions.shows the original data,along with the network’s output when the representation layer was stimulated with activation ranging from 0.1to 0.9.The training data were mapped into the interval 0.213–0.778using a single (sigmoidal)representation unit.The initial architecture consisted of a single 10-unit encoding layer and two 10-unit decoding layers.was set to 0.01,∆to 0.1,and the error threshold,,to 0.001.3.2NLDR Applied to Time SeriesThe Mackey–Glass problem consists of estimation of the intrinsic dimensionality of a scalar signal.Classically,such time series data is embedded in a space of “high enough”dimension such that one expects the geometric invariants to be preserved.However,this may significantly overestimate the number of variables needed to describe the data.Two different series were examined;parameter settings for the Mackey–Glass equation were chosen such that the intrinsic dimensionality is 2.1and 3.5.The data was embedded in a high dimensional space by the standard technique of recoding as vectors of lagged data.A 3dimensional representation was found for the 2.1dimensional data and a 4dimensional representation was found for the 3.5dimensional data.Figure 3shows the original data and its reconstruction for the 2.1dimensional data.Allowing higher reconstruction error resulted in a 3dimensional representation for the 3.5dimensional data,effectively smoothing the original signal (DeMers,1992).Figure 4shows the original data and its reconstruction for the 3.5dimensional data.The initial architecture consisted of a two 10-unit encoding layers and two 10-unit decoding layers,and a 7-unit representation layer.The representation layer was connected directly to the output layer.was set to 0.01,∆to 0.1,and the error threshold,,to 0.001.3.3FacesThe face image data is much more challenging.The face data are 6464pixel,8–bit grayscale images taken from (Cottrell &Metcalfe,1991),each of which can be considered to be a point in a 4,096dimensional “pixel space”.The question addressed is whether NLDR can find low–dimensional representations of the data which are more useful than principal components.The data was preprocessed by reduction to the first 50principal0.20.30.40.50.60.70.80.9200250300350400450500550600Mackey-Glass signal 4D Reconstruction, error bound 0.0024D Reconstruction, error bound 0.0004Figure 4:Data from the Mackey–Glass delay–differential equation with 35,correlation dimension 3.5,and the reconstructed signal encoded in four dimensions with two different error thresholds.components 3of the images.These reduced representations were then processed further by NLDR.The architecture consisted of a 30-unit encoding layer and a 30-unit decoding layer,and an initial representation layer of 20units.There were direct connections from the representation layer to the output layer.was 0.05,∆was 0.1and was 0.001.NLDR found a five–dimensional representation.Figure 5shows four of the 160images after reduction to the first 50principal components (used as training)and the same images after reconstruction from a five dimensional encoding.We are unable to determine whether the dimensions are meaningful;however,experiments with the decoder show that points inside the convex hull of the representations project to images which look like faces.Figure 6shows the reconstructed images from a linear interpolation in “face space”between the two encodings which are furthest apart.How useful are the representations obtained from a training set for identification and classification of other images of the same subjects?The 5–D representations were used to train a feedforward network to recognize the identity and gender of the subjects,as in (Cottrell &Metcalfe,1991).120images were used in training and the remaining 40used as a test set.The network correctly identified 98%of the training data subjects,and 95%on the test set.The network achieved 95%correct gender recognition on both the training and test sets.The misclassified subject is shown in Figure 7.An informal poll of visitors to the poster in Denver showed that about 2/3of humans classify the subject as male and 1/3as female.Although NLDR resulted in five dimensional encodings of the face data,and thus super-ficially compresses the data to approximately 55bits per image or 0.013bits per pixel,there is no data compression.Both the decoder portion of the network and the eigenvectors used in the initial processing must also be stored.These amortize to about 6bits per pixel,whereas the original images require only 1.1bits per pixel under run–length encoding.In order to achieve data compression,a much larger data set must be obtained in order to find the underlying human face manifold.Figure 5:Four of the original face images and their reconstruction after encoding as five dimensional data.Figure 6:The two images with 5–D encodings which are the furthest apart,and the reconstructions of four 5–D points equally spaced along the line joining them.Figure 7:“Pat”;the subject whose gender a feedforward network classified incorrectly.4CONCLUSIONSA method for automatically generating a non–linear encoder/decoder for high dimensional data has been presented.The number of representation units in thefinal network is an estimate of the intrinsic dimensionality of the data.The results are sensitive to the choice of error bound,though the precise relationship is as yet unknown.The size of the encoding and decoding hidden layers must be controlled to avoid over–fitting;any data set can be encoded into scalar values given enough resolution.Since we are using gradient search to solve a global non–linear optimization problem,there is no guarantee that this method willfind the global optimum and avoid convergence to local minima.However,NLDR consistently constructed low dimensional encodings which were decodeable with low loss. AcknowledgementsWe would like to thank Matthew Turk&Alex Pentland for making their facerec software available,which was used to extract the eigenvectors of the original face data.Thefirst author was partially supported by Fellowships from the California Space Institute and the McDonnell–Pew Foundation.ReferencesPierre Baldi and Kurt Hornik(1988)“Neural Networks and Principal Component Analysis: Learning from Examples without Local Minima”,Neural Networks2,53–58.Garrison Cottrell and Paul Munro(1988)“Principal Components Analysis of Images via Backpropagation”,in Proc.SPIE(Cambridge,MA).Garrison Cottrell,Paul Munro,and David Zipser(1989)“Image Compression by Backprop-agation:A Demonstration of Extensional Programming”,In Sharkey,Noel(Ed.),Models of Cognition:A review of Cognitive Science,vol.1.Garrison Cottrell and Janet Metcalfe(1991)“EMPA TH—Face,Emotion and Gender Recognition using Holons”in Lippmann,R.,Moody,J.&Touretzky,D.,(eds),Advances in Neural Information Processing Systems3.David DeMers(1992)“Dimensionality Reduction for Non–Linear Time Series”,Neural and Stochastic Methods in Image and Signal Processing(SPIE1766).Mark Kramer(1991)“Nonlinear Principal Component Analysis Using Autoassociative Neural Networks”,AIChE Journal37:233-243.Erkki Oja(1991)“Data Compression,Feature Extraction,and Autoassociation in Feedfor-ward Neural Networks”in Kohonen,T.,Simula,O.and Kangas,J.,eds,Artificial Neural Networks,737-745.Shiro Usui,Shigeki Nakauchi,and Masae Nakano(1991)“Internal Color Representation Acquired by a Five–Layer Neural Network”,in Kohonen,T.,Simula,O.and Kangas,J., eds,Artificial Neural Networks,867-872.。
nontrivial solution数学
非平凡解(nontrivial solution)是数学中一个重要的概念,它在许多不同的领域和学科中都有着广泛的应用。
在代数、微积分、微分方程、数论等领域,非平凡解都扮演着至关重要的角色。
本文将从不同角度来探讨非平凡解的含义、性质、应用以及个人理解。
1. 非平凡解的定义在数学中,对于一个方程或者问题,如果它存在解,而且这个解不是显而易见的、不是平凡的,那么我们就称这个解为非平凡解。
非平凡解通常是指与问题本身相关联的、不容易被直接观察或者推导出来的解。
在许多情况下,非平凡解往往意味着问题的复杂性和深度。
2. 非平凡解在代数中的应用在代数学中,非平凡解常常与方程、群论、交换环、域等概念相关联。
在群论中,对于一个群的正规子群,如果存在非平凡的商群,那么我们就称这个正规子群为非平凡子群。
非平凡的子群和非平凡的商群往往具有重要的代数性质,它们可以帮助我们更深入地理解群的结构和性质。
3. 非平凡解在微分方程中的意义在微分方程的研究中,非平凡解往往对于描述问题的复杂性和多样性起着重要的作用。
许多微分方程模型都存在非平凡解,这些非平凡解反映了问题的多种可能性和丰富性。
通过研究微分方程的非平凡解,我们可以深入理解问题的动态特性和稳定性。
4. 非平凡解在数论中的应用在数论中,非平凡解通常与数的分解、素数、同余等问题相关。
在同余方程中,非平凡解往往对于描述不同余类的结构和性质起着关键的作用。
而在解析数论中,对于一些特定的数论函数或者方程,存在非平凡解往往意味着数论函数的复杂性和多样性。
5. 个人观点和理解对于非平凡解的理解和研究,我认为它不仅仅是数学领域的一个概念,更是一种对于问题复杂性的认识和探索。
非平凡解反映了问题的多样性和深度,它们使我们能够更加全面、深刻地理解问题的本质和内在结构。
在实际问题中,寻找一个问题的非平凡解往往需要创新思维和深入挖掘,这对于我们解决现实生活中的复杂问题具有重要的指导意义。
总结回顾非平凡解是数学中一个重要而且深刻的概念,它在代数、微积分、微分方程、数论等多个领域都有着重要的应用和意义。
非一致格子上离散分数阶差分与分数阶和分
收稿日期:2020-11-25基金项目:福建省自然科学基金(2016J01032)作者简介:程金发(1966-),男,江西省乐平市人,博士,教授,博士生导师.*通信作者.E-mail :***************.cn非一致格子上离散分数阶差分与分数阶和分程金发*(厦门大学数学科学学院福建厦门,361005)摘要:众所周知,一致格子上分数阶和分与分数阶差分的思想概念也是最近几年才兴起的,并且在该邻域得到了很大的发展.但是在非一致格子x ()z =c 1z 2+c 2z +c 3或者x ()z =c 1q z +c 2q -z +c 3上,分数阶和分与分数阶差分的定义是什么,这是一个十分复杂和有趣的问题.本文首次提出非一致格子上分数阶和分与Riemann-Liouville 分数阶差分、Caputo 分数阶差分的定义以及非一致格子上广义Abel 积分方程的求解等基础性结果.关键词:超几何差分方程;非一致格子;分数阶和分;分数阶差分;特殊函数中图分类号:33C45;33D45;26A33;34K37文献标志码:A文章编号:2095-7122(2021)01-0001-013On the fractional sum and fractional difference on nonuniform latticesCHENG Jinfa *(School of Mathematical Sciences,Xiamen University,Xiamen,Fujian 361005,China )Abstract:As is well known,the idea of a fractional sum and difference on uniform lattice is more current,and gets a lot of development in this field.But the definitions of fractional sum and fractional difference of f ()z on nonuniform lattices x ()z =c 1z 2+c 2z +c 3or x ()z =c 1q z +c 2q -z +c 3seem much more complicated andinteresting.In this article,for the first time we propose the definitions of the fractional sum and fractional difference on nonuniform lattices.The solution of the generalized Abel equation is obtained etc.Key words:special function;orthogonal polynomials;adjoint difference equation;difference equation of hy-pergeometric type;nonuniform lattice第34卷第1期2021年3月闽南师范大学学报(自然科学版)Journal of Minnan Normal University (Natural Science )Vol.34No.1Mar.20211背景回顾及问题提出正如我们在本文序言指出的,分数阶微积分的概念几乎与经典微积分同时起步,可以回溯到Euler 和Leibniz 时期.经过几代数学家的努力,特别是近几十年来,分数阶微积分已经取得了惊人的发展和广阔的应用,有关分数阶微积分的著作层出不穷,例如文献[1-4],但是在一致格子x ()z =z 和x ()z =q z 或者q -z ,z ∈C 上关于离散分数阶微积分的思想,仍然是最近才兴起的.虽然关于一致格子x ()z =z 和x ()z =q z 的离散分数微积分出现和建立相对较晚,但是该领域目前已经做出了大量的工作,且取得了很大的发展[5-8].在最近十年的学术著作中,程金发[9],Goodrich 和Peterson [10]相继出版了两本有关离散分数阶方程理论、离散分数微积分的著作,其中全面系统地介绍了离散分数微积分的基本定义和基本定理,以及最新的参考资料.有关q -分数阶微积分方面的著作可参见Annaby 和Mansour [11].非一致格子的定义回溯到超几何型微分方程[12-13]:σ()z y ′′()z +τ()z y ′()z +λy ()z =0,(1)的逼近,这里σ()z 和τ()z 分别是至多二阶和一阶多项式,λ是常数.Nikiforov 等[14-15]将式(1)推广到如下最一般的复超几何差分方程σˉ[]x ()s ΔΔx ()s -12éëêùûú∇y ()s ∇x ()s +12τˉ[]x ()s éëêùûúΔy ()s Δx ()s +∇y ()s ∇x ()s +λy ()s =0,(2)这里σˉ()x 和τˉ()x 分别是关于x ()s 的至多二阶和一阶多项式,λ是常数,Δy ()s =y ()s +1-y ()s ,∇y ()s =y ()s -y ()s -1,并且x ()s 必须是以下非一致格子.定义1[16-17]两类格子函数x ()s 称之为非一致格子,如果它们满足x ()s =-c 1s 2+-c 2s +-c 3,(3)x ()s =c 1q s +c 2q -s +c 3,(4)这里c i ,-c i 是任意常数,且c 1c 2≠0,-c 1-c 2≠0.当c 1=1,c 2=c 3=0,或c 2=1,c 1=c 3=0或者-c 2=1,-c 1=-c 3=0时,这两种格子函数x ()s :x ()s =s ,(5)x ()s =q s 或x ()s =q -s(6)称之为一致格子.给定函数F ()s ,定义关于x γ()s 的差分或差商算子为∇γF ()s =∇F ()s ∇x γ()s ,且∇k γF ()z =∇∇x γ()z ()∇∇x γ+1()z ⋯()∇()F ()z ∇x γ+k -1()z .()k =1,2,⋯关于差商算子,命题1是常用的.命题1给定两个复函数f ()s ,g ()s ,成立恒等式Δυ()f ()s g ()s =f ()s +1Δυg ()s +g ()s Δυf ()s =g ()s +1Δυf ()s +f ()s Δυg ()s ,Δυ()f ()s g ()s =g ()s +1Δυf ()s -f ()s +1Δυg ()s g ()s g ()s +1=g ()s Δυf ()s -f ()s Δυg ()s g ()s g ()s +1,Δυ()f ()s g ()s =f ()s -1Δυg ()s +g ()s Δυf ()s =g ()s -1Δυf ()s +f ()s Δυg ()s ,(7)Δυ()f ()s g ()s =g ()s -1Δυf ()s -f ()s -1Δυg ()s g ()s g ()s -1=闽南师范大学学报(自然科学版)2021年2g ()s Δυf ()s -f ()s Δυg ()s g ()s g ()s -1.我们必须指出,在非一致格子式(3)或者式(4),即使当n ∈N ,如何建立非一致格子的n -差商公式,也是一件很不平凡的工作,因为它是十分复杂的,也是难度很大的.事实上,在文献[14-15]中,Nikiforov 等利用插值方法得到了如下n -阶差商∇()n 1[]f ()s 公式:定义2[12-13]对于非一致格子式(3)或式(4),让n ∈N +,那么∇()n 1[]f ()s =∑k =0n ()-1n -k[]Γ()n +1q[]Γ()k +1q[]Γ()n -k +1q×∏l =0n∇x []s +k -()n -12∇x []s +()k -l +12f ()s -n +k =∑k =0n()-1n -k[]Γ()n +1q[]Γ()k +1q[]Γ()n -k +1q×∏l =0n ∇x n +1()s -k ∇x []s +()n -k -l +12f ()s -k ,(8)这里[]Γ()s q 是修正的q -Gamma 函数,它的定义是[]Γ()s q=q -()s -1()s -24Γq ()s ,并且函数Γq ()s 被称为q -Gamma 函数;它是经典Euler Gamma 函数Γ()s 的推广.其定义是Γq ()s =ìíîïïïï∏k =0∞(1-q k +1)()1-q s -1∏k =0∞(1-q s +k),当||q <1;q -()s -1()s -22Γ1q ()s ,当||q >1.(9)经过进一步化简后,Nikiforov 等在文献[14]中将n 阶差分∇()n 1[]f ()s 的公式重写成下列形式:定义3[14]对于非一致格子式(3)或式(4),让n ∈N +,那么∇()n 1[]f ()s =∑k =0n ()[]-n qk[]k q ![]Γ()2s -k +c q[]Γ()2s -k +n +1+c qf ()s -k ∇x n +1()s -k ,这里[]μq=γ()μ=ìíîïïïïq u2-q -u 2q 12-q -12如果x ()s =c 1q s +c 2q -s +c 3;μ,如果x ()s =-c 1s 2+-c 2s +c 3,(10)且c =ìíîïïïïïïïïlog c 2c 1log q ,当x ()s =c 1q s +c 2q -s +c 3,-c 2-c 1,当x ()s =-c 1s 2+-c 2s +c 3.程金发:非一致格子上离散分数阶差分与分数阶和分第1期3现在存在两个十分重要且具有挑战性的问题需要进一步深入探讨:1)对于非一致格子上超几何差分方程式(2),在特定条件下存在关于x ()s 多项式形式的解,如果用Rodrigues 公式表示的话,它含有整数阶高阶差商.一个新的问题是:若该特定条件不满足,那么非一致格子上超几何差分方程式(2)的解就不存在关于x ()s 的多项式形式,这样高阶整数阶差商就不再起作用了.此时非一致格子超几何方程的解的表达形式是什么呢?这就需要我们引入一种非一致格子上分数阶差商的新概念和新理论.因此,关于非一致格子上α-阶分数阶差分及α-阶分数阶和分的定义是一个十分有趣和重要的问题.显而易见,它们肯定是比整数高阶差商更为难以处理的困难问题,自专著[14-15]出版以来,Nikiforov 等并没有给出有关α-阶分数阶差分及α-阶分数阶和分的定义,我们能够合理给出非一致格子上分数阶差分与分数阶和分的定义吗?2)另外,我们认为作为非一致格子上最一般性的离散分数微积分,它们也会有独立的意义,并可以导致许多有意义的结果和新理论.本文的目的是探讨非一致格子上离散分数阶和差分.受文章篇幅所限,本文我们仅合理给出非一致格上分数阶和分与分数阶差分的基本定义,其它更多结果例如:非一致格子离散分数阶微积分的一些基本定理,如:Euler Beta 公式,Cauchy Beta 积分公式,Taylor 公式、Leibniz 公式在非一致格子上的模拟形式,非一致格子上广义Abel 方程的解,以及非一致格子上中心分数差分方程的求解,离散分数阶差和分与非一致格子超几何方程之间联系等内容,请参见笔者新专著[16].2非一致格子上的整数和分与整数差分设x ()s 是非一致格子,这里s ∈ℂ.对任意实数γ,x γ()s =x ()s +γ2也是一个非一致格子.让∇γF ()s =f ()s .那么F ()s -F ()s -1=f ()s []x γ()s -x γ()s -1.选取z ,a ∈ℂ,和z -a ∈N .从s =a +1到z ,则有F ()z -F ()a =∑s =a +1zf ()s ∇x r()s .因此,我们定义∫a +1z f ()s d ∇x γ()s =∑s =a +1zf ()s ∇xγ()s .容易直接验证下列式子成立.命题2给定两个复变函数F ()z ,f ()z ,这里复变量z ,a ∈C 以及z -a ∈N ,那么成立1)∇γéëêùûú∫a +1zf ()s d ∇x γ()s =f ()z ;2)∫a +1z∇γF ()s d ∇x γ()s =F ()z -F ()a .现在让我们定义非一致格子上的广义n -阶幂函数[]x ()s -x ()z ()n 为[]x ()s -x ()z ()n =∏k =0n -1[]x ()s -x ()z -k ,()n ∈N +,当n 不是正整数时,需要将广义幂函数加以进一步推广,它的性质和作用是非常重要的,非一致格子上广义幂函数[]x γ()s -x γ()z ()α的定义如下:闽南师范大学学报(自然科学版)2021年4定义4[17-18]设α∈C ,广义幂函数[]x γ()s -x γ()z ()α定义为[]x γ()s -x γ()z ()α=ìíîïïïïïïïïïïïïïïïïïïïïΓ()s -z +a Γ()s -z ,如果x ()s =s ,Γ()s -z +a Γ()s +z +γ+1Γ()s -z Γ()s +z +γ-α+1,如果x ()s =s 2,()q -1αq α()γ-α+12Γq ()s -z +αΓq ()s -z ,如果x ()s =q s ,12α()q -12αq -α()s +γ2Γq ()s -z +αΓq ()s +z +γ+1Γq ()s -z Γq ()s +z +γ-α+1,如果x ()s =q s +q -s 2.(11)对于形如式(4)的二次格子,记c =-c 2-c 1,定义[]x γ()s -x γ()z ()α=-c 1αΓ()s -z +a Γ()s +z +γ+c +1Γ()s -z Γ()s +z +γ-α+c +1;(12)对于形如式(3)的二次格子,记c =logc 2c 1log q,定义[]xγ()s -x γ()z ()α=éëùûc 1()1-q 2αq -α()s +γ2Γq()s -z +a Γq()s +z +γ+c +1Γq()s -z Γq()s +z +γ-α+c +1,(13)这里Γ()s 是Euler Gamma 函数,且Γq ()s 是Euler q -Gamma 函数,其定义如式(9).命题3[17-18]对于x ()s =c 1q s +c 2q -s +c 3或者x ()s =-c 1s 2+-c 2s +-c 3,广义幂[]x γ()s -x γ()z ()α满足下列性质:[]x γ()s -x γ()z []x γ()s -x γ()z -1()μ=[]x γ()s -x γ()z ()μ[]xγ()s -x γ()z -μ=(14)[]xγ()s -x γ()z ()μ+1;(15)[]xγ-1()s +1-x γ-1()z ()μ[]xγ-μ()s -x γ-μ()z =[]x γ-μ()s +μ-x γ-μ()z []x γ-1()s -x γ-1()z ()μ=[]x γ()s -x γ()z ()μ+1;(16)ΔzΔx γ-μ+1()z []xγ()s -x γ()z ()μ=-∇s∇x γ+1()s []x γ+1()s -x γ+1()z ()μ=(17)-[]μq []x γ()s -x γ()z ()μ-1;(18)∇z∇x γ-μ+1()z {}1[]xγ()s -x γ()z ()μ=-ΔsΔx γ-1()s ìíîïïüýþïï1[]x γ-1()s -x γ-1()z ()μ=(19)[]μq[]xγ()s -x γ()z ()μ+1(20)这里[]μq 定义如式(10).程金发:非一致格子上离散分数阶差分与分数阶和分第1期5现在让我们详细给出非一致格子x γ()s 上整数阶和分的定义,这对于我们进一步给出非一致格子x γ()s 上分数阶和分的定义是十分有帮助的.设γ∈R ,对于非一致格子x γ()s ,数集{}a +1,a +2,⋯,z 中f ()z 的1-阶和分定义为y 1()z =∇-1γf ()z =∫a +1z f ()s d ∇x γ()s ,(21)这里y 1()z =∇-1γf ()z 定义在数集{}a +1,mod ()1中.那么由命题2,我们有∇1γ∇-1γf ()z =∇y 1()z ∇x γ()z =f ()z ,(22)并且对于非一致格子x γ()s ,数集{}a +1,a +2,⋯,z 中f ()z 的2-阶和分定义为y 2()z =∇-2γf ()z =∇-1γ+1[]∇-1γf ()z =∫a +1z y 1()s d ∇x γ+1()s =∫a +1z d ∇x γ+1()s ∫a +1s f ()t d ∇x γ()t =∫a +1z f ()t d ∇x γ()t ∫tz d ∇x γ+1()s =∫a +1z []x γ+1()z -x γ+1()t -1f ()s d ∇x γ()s .(23)这里y 2()z =∇-2γf ()z 定义在数集{}a +1,mod ()1中.同时,可得∇1γ+1∇1γ-1y 1()z =∇y 2()z ∇x γ+1()z =y 1()z ,∇2γ∇-2γf ()z =∇∇x γ()z ()∇y 2()z ∇x γ+1()z =∇y 1()z ∇x γ()z =f ()z .(24)更一般地,由数学归纳法,对于非一致格子x γ()s ,数集{}a +1,a +2,⋯,z 中函数f ()z ,我们可以给出函数f ()z 的n -阶和分定义为y k ()z =∇-kγf ()z =∇-1γ+k -1[]∇-()k -1γf ()z =∫a +1z y k -1()s d ∇x γ+k -1()s =1[]Γ()k q∫a +1z []xγ+k -1()z -x γ+k -1()t -1()k -1f ()t d ∇x γ()t ,()k =1,2,⋯(25)这里[]Γ()k q=ìíîïïq -()k -1()k -2Γq ()k ,如果x ()s =c 1q s +c 2q -s +c 3;Γ()α,如果x ()s =-c 1s 2+-c 2s +c 3,这满足下式[]Γ()k +1q=[]k q []Γ()k q ,[]Γ()2q =[]1q []Γ()1q =1.那么成立∇kγ∇-k γf ()z =∇∇x γ()z ()∇∇x γ+1()z ⋯()∇y k ()z ∇x γ+k -1()z =f ()z .()k =1,2,⋯(26)需要指出的是,当k ∈C 时,式(25)右边仍然是有意义的,因此自然地,我们就可以对非一致格子x γ()s 闽南师范大学学报(自然科学版)2021年6给出函数f ()z 的分数阶和分定义如下:定义5(非一致格子分数阶和分)对任意Re α∈R +,对于非一致格子式(3)和式(4),数集{}a +1,a +2,⋯,z 中的函数f ()z ,我们定义它的α-阶分数阶和分为∇-αγf ()z =1[]Γ()αq∫a +1z []xγ+α-1()z -x γ+α-1()t -1()α-1f ()s d ∇x γ()s ,(27)这里[]Γ()αq=ìíîïïq -()s -1()s -2Γq ()α,如果x ()s =c 1q s +c 2q -s +c 3;Γ()α,如果x ()s =-c 1s 2+-c 2s +c 3,这满足下式[]Γ()α+1q=[]αq []Γ()αq .3非一致格子上的Abel 方程及分数阶差分非一致格子x γ()s 上f ()z 的分数阶差分定义相对似乎更困难和复杂一些.我们的思想是起源于非一致格子上广义Abel 方程的求解.具体来说,一个重要的问题是:让m -1<Re α≤m ,定义在数集{}a +1,a +2,⋯,z 的f ()z 是一给定函数,定义在数集{}a +1,a +2,⋯,z 的g ()z 是一未知函数,它们满足以下广义Abel 方程∇-αγg ()z =∫a +1z []x γ+α-1()z -x γ+α-1()t -1()α-1[]Γ()αqg ()t d ∇x γ()t =f ()t ,(28)怎样求解该广义Abel 方程式(28)?为了求解方程式(28),我们需要利用重要的Euler Beta 公式在非一致格子下的基本模拟.定理1[16](非一致格子上Euler Beta 公式)对于任何α,β∈C ,那么对非一致格子x ()s ,我们有∫a +1z []x β()z -x β()t -1()β-1[]Γ()βq[]x ()t -x ()αα[]Γ()α+1qd ∇x 1()t =[]x β()z -x β()α()α+β[]Γ()α+β+1q.(29)定理2(Abel 方程的解)设定义在数集{}a +1,mod ()1中的函数f ()z 和函数g ()z 满足∇-αγg ()z =f ()z ,0<m -1<Re α≤m ,那么g ()z =∇m γ∇-m +αγ+αf ()z (30)成立.证明我们仅需证明∇-m γg ()z =∇-m +αγ+αf ()z ,即∇-()m -αγ+αf ()z =∇-()m -αγ+α∇-αγg ()z =∇-m γg ()z .事实上,由定义5可得程金发:非一致格子上离散分数阶差分与分数阶和分第1期7∇-()m -αγ+af ()z =∫a +1z []xγ+m -1()z -x γ+m -1()t -1()m -α-1[]Γ()m -αqf ()t d ∇x γ+α()t =∫a +1z []x γ+m -1()z -x γ+m -1()t -1()m -α-1[]Γ()m -αqd ∇x γ+α()t ⋅∫a +1z []xγ+α-1()t -x γ+α-1()s -1()α-1[]Γ()αqg ()s d ∇x γ()s =∫a +1zg ()s ∇x γ()s ∫sz []xγ+m -1()z -x γ+m -1()t -1()m -α-1[]Γ()m -αq⋅[]xγ+α-1()t -x γ+α-1()s -1()α-1[]Γ()αqd ∇x γ+α()t .在定理1中,将α+1替换成s ;α替换成α-1;β替换成m -α,且将x ()t 替换成x γ+α-1()t ,那么x β()t 替换成x γ+m -1()t ,则我们能够得出下面的等式∫sz []xγ+m -1()z -x γ+m -1()t -1()m -α-1[]Γ()m -αq[]xγ+α-1()t -x γ+α-1()s -1()α-1[]Γ()αqd ∇x γ+α()t =[]xγ+m -1()z -x γ+m -1()s -1()-m -1[]Γ()m q,因此,我们有∇-()m -αγ+af ()z =∫a +1z []x γ+m -1()z -x γ+m -1()s -1()-m -1[]Γ()m qg ()s d ∇x γ()s =∇-mγg ()z ,这样就有∇m γ∇-()m -αγ+a f ()z =∇m γ∇-m γg ()z =g ()z .由定理2得到启示,很自然地我们给出关于f ()z 的Riemann-Liouville 型α-阶()0<m -1<Re α≤m 分数阶差分的定义如下:定义6(Riemann-Liouville 分数阶差分)让m 是超过Re α的最小正整数,对于非一致格子x γ()s ,数集{}α,mod ()1中f ()z 的Riemann-Liouville 型α-阶分数阶差分定义为∇αγf ()z =∇m γ()∇α-mγ+αf ()z .(31)形式上来说,在定义5中,如果α替换成-α,那么式(27)的右边将变为∫a +1z []xγ-α-1()z -x γ-α-1()t -1()-α-1[]Γ()-αqf ()t d ∇x γ()t =∇∇x γ-α()t ()∇∇x γ-α+1()t ⋯()∇∇x γ-α+n -1()t ⋅∫a +1z[]xγ+n -α-1()z -x γ+n -α-1()t -1()n -α-1[]Γ()n -αqf ()t d ∇x γ()t =∇n γ-α∇-n +αγf ()z =∇αγ-αf ()z .(33)闽南师范大学学报(自然科学版)2021年8从式(33),我们也可以得到f ()z 的Riemann-Liouville 型α-阶分数阶差分如下:定义7(Riemann-Liouville 型分数阶差分2)对任意Re α>0,对于非一致格子x γ()s ,数集{}a +1,a +2,⋯,z 中f ()z 的Riemann-Liouville 型α-阶分数阶差分定义为∇αγ-αf ()z =∫a +1z x γ-α-1()z -x γ-α-1()t -1()-α-1[]Γ()-αqf ()t d ∇x γ()t ,(34)将∇γ-α()t 替换成∇γ()t ,那么∇αγf ()z =∫a +1z []x γ-1()z -x γ-1()t -1()-α-1[]Γ()-αqf ()t d ∇x γ+α()t ,(35)这里假定[]Γ()-αq ≠0.4非一致格子上Caputo 型分数阶差分在本节,我们将给出非一致格子上Caputo 型分数阶差分的合理定义.定理3(分部求和公式)给定两个复变函数f (s ),g (s ),那么∫a +1z g (s )∇γf (s )d ∇x γ(s )=f (z )g (z )-f (a )g (a )-∫a +1z f (s -1)∇γg (s )d ∇x γ(s ),这里z ,a ∈C ,且假定z -a ∈N .证明应用命题1,可得g (s )∇γf (s )=∇γ[f (z )g (z )]-f (s -1)∇γg (s ),这样就有g (s )∇r f (s )=∇r [f (z )g (z )]-f (s -1)∇r g (s ).关于变量s ,从a +1到z 求和,那么可得∫a +1z g (s )∇γf (s )d ∇x γ(s )=∫a +1z ∇γ[f (z )g (z )]∇x γ(s )-∫a +1z f (s -1)∇γg (s )d ∇x γ(s )=f (z )g (z )-f (a )g (a )-∫a +1z f (s -1)∇γg (s )d ∇x γ(s ).与非一致格子上Riemann-Liouville 型分数阶差分定义的思想来源一样,对于非一致格子上Caputo 型分数阶差分定义思想,也是受启发于非一致格子上广义Abel 方程式(28)的解.在本文第3节,借助于非一致格子上的Euler Beta 公式,我们已经求出广义Abel 方程∇-αγg (z )=f (z ),0<m -1<α≤m ,是g (z )=∇αγf (z )=∇m γ∇-m +αγ+αf (z ).(36)现在我们将用分部求和公式,给出式(36)的另一种新的表达式.事实上,我们有∇a γf (z )=∇m γ∇-m +aγ+a f (z )=∇mγ∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α-1)[Γ(m -α)]qf (s )d ∇x γ+α(s ).(37)应用恒等式∇(s )[x γ+m -1(z )-x γ+m -1(s )](m -α)∇x γ+α(s )=∇(s )[x γ+m -1(z )-x γ+m -1(s -1)](m -α)∇x γ+α(s -1)=-[m -α]q [x γ+m -1(z )-x γ+m -1(s -1)](m -α-1),那么以下表达式程金发:非一致格子上离散分数阶差分与分数阶和分第1期9∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α-1)[Γ(m -α)]qf (s )d ∇x γ+α(s ),可被改写成∫a +1zf (s )∇(s ){-[x γ+m -1(z )-x γ+m -1(s )](m -α)[Γ(m -α+1)]q}d ∇s =∫a +1z f (s )∇γ+α-1{-[x γ+m -1(z )-x γ+m -1(s )](m -α)[Γ(m -α+1)]q}d ∇x γ+α-1(s ).应用分部求和公式,可得∫a +1zf (s )∇γ+α-1{-[x γ+m -1(z )-x γ+m -1(s )](m -α)[Γ(m -α+1)]q}d ∇x γ+α-1(s )=f (a )[x γ+m -1(z )-x γ+m -1(a )](m -α)[Γ(m -α+1)]q+∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α)[Γ(m -α+1)]q∇γ+α-1[f (s )]d ∇x γ+α-1(s ).因此,这可导出∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α-1)[Γ(m -α)]q}f (s )d ∇x γ+α(s )=f (a )[x γ+m -1(z )-x γ+m -1(a )](m -α)[Γ(m -α+1)]q+∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α)[Γ(m -α+1)]q∇γ+α-1[f (s )]d ∇x γ+α-1(s ).(38)进一步,考虑∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α)[Γ(m -α+1)]q∇γ+α-1[f (s )]d ∇x γ+α-1(s ),(39)利用恒等式∇(s )[x γ+m -1(z )-x γ+m -1(s )](m -α+1)∇x γ+α-1(s )=∇(s )[x γ+m -1(z )-x γ+m -1(s -1)](m -α+1)∇x γ+α-1(s -1)=-[m -α+1]q [x γ+m -1(z )-x γ+m -1(s -1)](m -α),表达式(39)能被改写成∫a +1z∇γ+α-1[f (s )]∇(s ){-[x γ+m -1(z )-x γ+m -1(s -1)](m -α+1)[Γ(m -α+2)]q}d ∇s =∫a +1z∇γ+α-1[f (s )]∇γ+α-2{-[x γ+m -1(z )-x γ+m -1(s -1)](m -α+1)[Γ(m -α+2)]q}d ∇x γ+α-2(s ).由分部求和公式,我们有∫a +1z ∇γ+α-1[f (s )]∇γ+α-2{-[x γ+m -1(z )-x γ+m -1(s -1)](m -α+1)[Γ(m -α+2)]q}d ∇x γ+α-2(s )=∇γ+α-1f (a )[x γ+m -1(z )-x γ+m -1(a )](m -α+1)[Γ(m -α+2)]q +∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α+1)[Γ(m -α+2)]q[∇γ+α-2∇γ+α-1]f (s )d ∇x γ+α-2(s )=闽南师范大学学报(自然科学版)2021年10∇γ+α-1f (a )[x γ+m -1(z )-x γ+m -1(a )](m -α+1)[Γ(m -α+2)]q+∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α+1)[Γ(m -α+2)]q∇2γ+α-2f (s )d ∇x γ+α-2(s ).因此,我们得到∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α)[Γ(m -α+1)]q∇γ+α-1[f (s )]d ∇x γ+α-1(s )=∇γ+α-1f (a )[x γ+m -1(z )-x γ+m -1(a )](m -α+1)[Γ(m -α+2)]q+∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α+1)[Γ(m -α+2)]q∇2γ+α-2f (s )d ∇x γ+α-2(s ).(40)同理,用数学归纳法,我们可得∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α+k -1)[Γ(m -α+k )]q∇kγ+α-k [f (s )]d ∇x γ+α-k (s )=∇kγ+α-kf (a )[x γ+m -1(z )-x γ+m -1(a )](m -α+k )[Γ(m -α+k +1)]q+∫a +1z[x γ+m -1(z )-x γ+m -1(s -1)](m -α+k )[Γ(m -α+k +1)]q∇k +1γ+α-(k +1)f (s )d ∇x γ+α-(k +1)(s ).(k =0,1,⋯,m -1)(41)将式(38),(40)和(41)代入式(37),则有∇αγf ()z =∇m γìíîïïf ()a []x γ+m -1()z -x γ+m -1()a ()m -α[]Γ()m -α+1q +∇γ+α-1f ()a []xγ+m -1()z -x γ+m -1()a ()m -α+1[]Γ()m -α+2q+∇kγ+α-kf ()a []x γ+m -1()z -x γ+m -1()a ()m -α+k []Γ()m -α+k +1q+⋯+∇m -1γ+α-()m -1f ()a []x γ+m -1()z -x γ+m -1()a ()2m -α-1[]Γ()2m -αq+üýþïï∫a +1z []xγ+m -1()z -x γ+m -1()s -1()2m -α-1[]Γ()2m -αq∇m γ+α-mf ()s d ∇x γ+α-m ()s =∇m γ{}∑k =0m -1∇kγ+α-kf ()a []x γ+m -1()z -x γ+m -1()a ()m -α+k []Γ()m -α+k +1q+∇α-2m γ+α-m ∇mγ+α-m f ()z =∑k =0m -1∇kγ+α-kf ()a []x γ-1()z -x γ-1()a ()-α+k []Γ()-α+k +1q+∇α-m γ+α-m ∇mγ+α-m f ()z .总之,我们有下面的程金发:非一致格子上离散分数阶差分与分数阶和分第1期11定理4(广义Abel 方程解2)假设定义在数集{}a +1,a +2,⋯,z 上的函数f ()z 和g ()z 满足∇-αγg ()z =f ()z ,0<m -1<Re α≤m ,那么g ()z =∑k =0m -1∇k γ+α-kf ()a []xγ-1()z -x γ-1()a ()-α+k []Γ()-α+k +1q+∇α-m γ+α-m ∇mγ+α-m f ()z .受到定理4的启示,我们很自然地给出函数f ()z 的α-阶()0<m -1<Re α≤m Caputo 分数阶差分如下:定义8(Caputo 分数阶差分)让m 是Re α超过的最小整数,非一致格子上定义在数集{}a +1,a +2,⋯,z 函数f ()z 的α-阶Caputo 分数阶差分定义为C∇αγf ()z =∇α-m γ+α-m ∇mγ+α-m f ()z .最后,本文再强调指出:对于非一致格子上超几何差分方程式(2),在特定条件下存在关于x ()s 多项式形式的解,如果用Rodrigues 公式表示的话,它含有整数阶高阶差分.一个重要的问题是:若该特定条件不满足,那么非一致格子超几何差分方程的解就不存在关于x ()s 的多项式形式,这样高阶整数阶差分将不再起作用了,这就迫切需要我们引入一种非一致格子上分数阶差分的新概念和新理论.因此,关于非一致格子上阶分数阶差分及阶分数阶和分的定义是一个十分有趣和重要的问题.有关非一致格子超几何差分方程与离散分数阶差和分的联系,更深入的内容参见笔者著作[16]及文献[19-21].(42)(43)参考文献:[1]Kilbas A A,Srivastava H M,Trujillo J J.Theory and applications of fractional differential equations[M].Holland:North-Hol-land Mathatics Studies,Elsevier,2006.[2]Miller S,Ross B.An introduction to the fractional calculus and fractional differential equations[M].NewYork:JohnWiley andSons,1993.[3]Podlubny I.Fractional Differential Equations[M].San Diego,CA:Academic Press,1999.[4]Samko S G,Kilbas A A,Marichev O I.Fractional integrals and derivatives:theory and applications[M].London:Gordon andBreach,1993.[5]Anastassiou G A.Nabla discrete fractional calculus and nalba inequalities[J].Mathematical and Computer Modelling,2010,51:562-571.[6]Atici F M,Eloe P W.Discrete fractional calculus with the nable operator[J].Electronic Journal of Qualitative Theory of Differ-ential Equations,Spec.Ed.I,2009(3):1-12.[7]Atici F M,Eloe P W.Initialvalue problems in discrete fractional calulus[J].Pro.Amer.Math.Soc,2009,137:981-989.[8]Ferreira A C,Torres F M.Fractional h-differences arising from the calculus of variations[J].Appl Anal Discrete Math,2011(5):110-121.[9]程金发.分数阶差分方程理论[M].厦门:厦门大学出版社,2011.[10]Goodrich C,Peterson A C.Discrete fractional discrete fractional discrete fractional calculus[M].Switzerland:Springer Inter-national Publishing,2015.[11]Annaby M H,Mansour Z S.q-Fractional Calculus and Equations[M].NewYork:Springer-Verlag,2012.[12]Andrews G E,Askey R,Roy R.Special functions.Encyclopedia of Mathematics and its Applications[M].Cambridge:Cam-bridge University Press,1999.[13]Wang Z X,Guo D R.Special Functions[M].Singapore:World Scientific Publishing,1989.闽南师范大学学报(自然科学版)2021年12[14]Nikiforov A F,Suslov S K,Uvarov V B.Classical orthogonal polynomials of a discrete variable[M].Berlin:Springer-Verlag,1991.[15]Nikiforov A F,Uvarov V B.Special functions of mathematical physics:a unified introduction with applications[M].Basel:Birkhauser Verlag,1988.[16]程金发.非一致格子超几何方程与分数阶差和分[M].北京:科学出版社,2021.[17]Atakishiyev N M,Suslov S K.Difference hypergeometric functions,in:progress in approximation theory[M].New York:Springer-Verlag,1992:1-35.[18]Suslov S K.On the theory of difference analogues of special functions of hypergeo-metric type[J].Russian Math Surveys,1989,44:227-278.[19]Cheng J F,Jia L K.Generalizations of rodrigues type formulas for hypergeometric difference equations on nonuniform[J].Journal of Difference Equations and Applications,2020,26(4):435-457.[20]Cheng J F,Dai W Z.Adjoint difference equation for a Nikiforov-Uvarov-Suslov difference equation of hypergeometric typeon non-uniform Lattices[J].Ramanujan Journal,2020,53:285-318.[21]Cheng J F.On the complex difference equation of hypergeometric type on non-uniform lattices[J].Acta Mathematical Sinica,English Series,2020,36(5):487–511.[责任编辑:钟国翔]程金发:非一致格子上离散分数阶差分与分数阶和分第1期13。
Bull. London Math. Soc. 39 (2007) 447–452 C 2007 London Mathematical Society doi10.1112bl

e2007London Mathematical Society Bull.London Math.Soc.39(2007)447–452Cdoi:10.1112/blms/bdm021 HAMILTONIAN EMBEDDINGS FROM TRIANGULATIONSMIKE J.GRANNELL,TERRY S.GRIGGS and JOZEFˇSIR´AˇNAbstractA Hamiltonian embedding of K n is an embedding of K n in a surface,which may be orientable or non-orientable, in such a way that the boundary of each face is a Hamiltonian cycle.Ellingham and Stephens recently established the existence of such embeddings in non-orientable surfaces for n=4and n 6.Here we present an entirely new construction which produces Hamiltonian embeddings of K n from triangulations of K n when n≡0or1 (mod3).We then use this construction to obtain exponential lower bounds for the numbers of nonisomorphic Hamiltonian embeddings of K n.1.IntroductionA Hamiltonian embedding of K n,the complete graph of order n,is an embedding of K n in a surface,which may be orientable or non-orientable,in such a way that the boundary of each face is a Hamiltonian cycle.The recent paper by Ellingham and Stephens[5]established the existence of such embeddings in non-orientable surfaces for n=4and n 6.In this paper we present an entirely new construction which,by surgery on a surface triangulation of K n, generates a Hamiltonian embedding of K n on a surface of higher genus.This novel construction may be used to establish the existence of2an−o(n)nonisomorphic Hamiltonian embeddings of K n for n≡0or1(mod3),where a>0is a constant.For certain residue classes of n this lower bound may be improved to2an2−o(n2).Ringel,Youngs and others established the existence of triangulations of K n for n≡0or1 (mod3)in the course of proving the Heawood map colouring conjecture[12].To elaborate briefly:if n≡0,3,4or7(mod12)then there is a triangulation of K n in an orientable surface,while if n≡0or1(mod3)and n=3,4or7,then there is a triangulation of K n in a non-orientable surface.In a triangulation,each face is as small as possible.At the opposite extreme,for every n there exists an embedding of K n having a single face(see,for example, [10]).Around this single face every vertex appears n−1times.The problem of constructing Hamiltonian embeddings of K n is intermediate between the two extremes–the face lengths are as large as possible subject to the restriction that no vertex is repeated on the boundary of any face.In a Hamiltonian embedding of K n,the number of faces is n−1.In the non-orientable case, Euler’s formula gives the genus asγ=(n−2)(n−3)/2.In the orientable case,the genus is g=(n−2)(n−3)/4,which implies that n≡2or3(mod4)is a necessary condition for the embedding.We assume that the reader is familiar with the basic terminology and methods of topological graph theory,such as may be found in[10,12],in particular the representation of embeddings by rotation schemes.Received20April2006;published online4May2007.2000Mathematics Subject Classification05C10.This work was supported by the Leverhulme Trust under grant number F/00269/E.448MIKE J.GRANNELL,TERRY S.GRIGGS AND JOZEFˇSIR´AˇN2.The constructionAs remarked above,for n≡0or1(mod3),there exists a triangulation of K n in a surface. Our construction starts with any such triangulation of K n;whether the triangulation is in an orientable or non-orientable surface is immaterial.To avoid trivial cases we assume that n 4. Construction 2.1.Take a triangulation of K n on the vertex set{∞,a1,a2,...,a n−1} and,without loss of generality,take the rotation scheme to have the following form.∞:a1a2a3a4...a n−2a n−1a1:∞a2b1,1b1,2...b1,n−4a n−1a2:∞a3b2,1b2,2...b2,n−4a1.. .......a i:∞a i+1b i,1b i,2...b i,n−4a i−1.. .......a n−1:∞a1b n−1,1b n−1,2...b n−1,n−4a n−2where,for each i=1,2,...,n−1,(b i,1b i,2...b i,n−4)is some permutation of{a1,a2,...,a n−1}\ {a i−1,a i,a i+1},with subscript arithmetic modulo n−1.From the n lines of the rotation scheme,create n−1Hamiltonian cycles by discard-ing thefirst line and,for each i,replacing the line corresponding to a i by the cycle A i=(∞a i a i+1b i,1b i,2...b i,n−4a i−1).It is easy to see that these cycles form a Hamiltonian decomposition of2K n.The Hamiltonian face corresponding to A i is formed from the triangular faces that comprise the rotation at a i in the original triangulation,with the triangle(∞a i a i+1) removed.It remains to show that these Hamiltonian faces may be sewn together along common edges to produce a Hamiltonian embedding of K n.In order to prove this,it is only necessary to prove that the resulting rotation about any vertex comprises a single cycle of length n−1, rather than a set of shorter cycles with total length n−1.Note that a section of a cycle boundary(...a b c...)gives rise to a part of the rotation about b having the form b:...c a... (of course,the direction of the rotation at b is not determined).Considerfirst the point∞.The rotation about this point obtained from the Hamiltonian cycles is∞:a1a2...a n−1which is a single cycle of length n−1.Consider next any of the remaining points,say a i.In the original triangulation,the rotationa i:∞a i+1b i,1b i,2...b i,n−4a i−1implies that,in this triangulation,the rotations about a i+1,b i,1,b i,2,...,b i,n−5,b i,n−4,a i−1 contain the following sequences.a i+1:...b i,1a i∞...b i,1:...b i,2a i a i+1...b i,2:...b i,3a i b i,1..... ... .b i,n−5:...b i,n−4a i b i,n−6...b i,n−4:...a i−1a i b i,n−5...a i−1:...∞a ib i,n−4...HAMILTONIAN EMBEDDINGS FROM TRIANGULATIONS449 These sequences for a i+1,b i,1,b i,2,...,b i,n−4appear in the corresponding Hamiltonian cycles, while for A i−1and A i we haveA i−1=(...a i−1a i b i−1,1...)=(...a i−1a i b i,n−4...),A i=(...∞a i a i+1...).These sequences enable us to construct the rotation about a i in the embedding of the Hamiltonian cycles.For n even it isa i:a i+1∞b i,1b i,3b i,5...b i,n−5a i−1b i,n−4b i,n−6...b i,2,while for n odd it isa i:a i+1∞b i,1b i,3b i,5...b i,n−4a i−1b i,n−5b i,n−7...b i,2.In either case,this is a cycle of length n−1,and this completes the verification of the construction.To consider the question of orientability,delete the point∞and the edges incident with∞from the embedding to obtain a single face embedding of K n−1with boundary(a1a2b1,1b1,2...b1,n−4a n−1a1b n−1,1b n−1,2...b n−1,n−4a n−2a n−1...b2,n−4).If,in the order given,any subsequence of the form a j a j+1appears twice in this boundary then the embedding of K n−1,and hence that of K n,must be non-orientable.When the original triangulation of K n is orientable this will happen for every j=1,2,...,n−1.This is because each directed edge a j a j+1must appear precisely once in one of the rotations a i:∞a i+1b i,1b i,2...b i,n−4a i−1.Thus an orientable triangulation of K n will,by this construction,produce a non-orientable Hamiltonian embedding of K n.Although it appears conceivable that a non-orientable triangulation might produce an orientable Hamiltonian embedding of K n for n≡3,6,7or10(mod12),we have no examples of this and such situations seem likely to be rare.3.Exponential lower boundsIn this section we establish lower bounds for the numbers of nonisomorphic Hamiltonian embeddings of K n for n lying in certain residue classes.The supporting surface may be either orientable or non-orientable.We start with a lemma.Lemma3.1.A Hamiltonian embedding of K n,n≡0or1(mod3),can be obtained from at most2n distinct triangulations of K n by means of Construction2.1.Proof.Given a Hamiltonian embedding of K n on afixed set of n points,we check each point in turn to see if it can play the role of the point∞in the construction,and we show that,for each point,this can happen in at most two ways.Take a point h∗and suppose that the rotation at h∗in the Hamiltonian embedding ish∗:h1h2...h n−1.Then the Hamiltonian cycles may be taken asH i=(h∗h i j i,1j i,2...j i,n−3h i−1)where(j i,1j i,2...j i,n−3)is some permutation of{h1,h2,...,h n−1}\{h i,h i−1}.In order to be derived from the construction,we must either have j i,1=h i+1for every i=1,2,...,n−1,or j i,n−3=h i−2for every i=1,2,...,n−1.In the former case,the450MIKE J.GRANNELL,TERRY S.GRIGGS AND JOZEFˇSIR´AˇNrotations in the triangulation(assuming it exists)are determined ash∗:h1h2...h n−1h i:h∗h i+1j i,2j i,3...j i,n−3h i−1(i=1,2,...,n−1).In the latter case the rotations in the triangulation(assuming it exists)must beh∗:h1h2...h n−1h i:h∗h i−1j i+1,n−4j i+1,n−5...j i+1,1h i+1(i=1,2,...,n−1).The result now follows.We now prove a result from which lower bounds may easily be deduced.Theorem3.1.If there exist M nonisomorphic triangulations of K n,n≡0or1(mod3), then there exist at least M/4n2(n−1)nonisomorphic Hamiltonian embeddings of K n. Proof.From M nonisomorphic triangulations of K n,it is possible to construct at least Mn!/2n(n−1)distinct triangulations of K n on a common point set by applying all possible n!permutations of the points and noting that the largest possible order of an automorphism group of such a triangulation is2n(n−1).From each of these distinct triangulations we may construct a Hamiltonian embedding of K n using Construction2.1.By Lemma3.1,each such embedding can be obtained from at most2n distinct triangulations.Hence there are at least Mn!/4n2(n−1)distinct Hamiltonian embeddings on a common point set.The largest possible size of an isomorphism class for such an embedding is n!.Hence there are at least M/4n2(n−1).nonisomorphic Hamiltonian embeddings of KCorollary 3.1.For n≡0or1(mod3)there are at least2n/6−o(n)nonisomorphic Hamiltonian embeddings of K n.Proof.For n≡0or1(mod3),Korzhik and Voss[11]established that there are at least 2n/6−o(n)nonisomorphic triangulations of K n.The result follows immediately from this and Theorem3.1.Corollary3.2.For n≡1,7or9(mod18)there are at least2n2/54−o(n2)nonisomorphic Hamiltonian embeddings of K n.Proof.Firstly,we note that for each n≡3(mod6)there is a face2-colourable triangulation of K n having a parallel class of faces(that is,a set of faces covering all n vertices,each precisely once)in each colour class.The orientable triangulations of K n,n≡3(mod12),given by Ringel[12]are face 2-colourable because the current graphs employed to construct these embeddings are bipartite. The Steiner triple systems involved in these embeddings are those produced by the Bose construction(see,for example,[3])from the group(Z n/3,+),and indeed a direct construction of the embeddings from these Steiner systems is given in[8].The Bose construction produces Steiner triple systems having a parallel class,and so these orientable triangulations each contain a parallel class of faces in each colour class.Similarly,the non-orientable triangulations of K n, n≡9(mod12),also given by Ringel[12]are face2-colourable since the cascades used to construct them are bipartite.As shown in[1],the Steiner triple systems involved here are also copies of Bose systems and hence the embeddings again have a parallel class of faces in each colour class.In fact,Ducrocq and Sterboul[4]also give a direct construction producing faceHAMILTONIAN EMBEDDINGS FROM TRIANGULATIONS451 2-colourable triangulations of K n in non-orientable surfaces for all n≡3(mod6),n 9,with the Steiner triple systems involved being copies of Bose systems.Secondly,we note that for n≡1(mod6),Grannell and Korzhik[7]proved that there is a face2-colourable triangulation of K n in a non-orientable surface.We also remark that for all n≡7(mod12),Youngs[13]gives a variety of embeddings,including face2-colourable triangulations.Having made these preliminary observations,we can now use two recursive constructions to produce our lower bounds.Applying the n→3n−2construction for triangular embeddings given in[2]establishes that for n≡1or7(mod18)there are at least2n2/54−o(n2)nonisomorphic triangulations of K n. The paper[9]gives an n→mn construction for orientable triangulations but,as remarked in that paper,the method is easily extended to the non-orientable case.In the case m=3 it requires a face2-colourable triangulation of K9and a parallel class of faces in one of the colour classes of the original K n triangulation.This construction then establishes the same lower bound(2n2/54−o(n2))on the number of triangulations of K n for n≡9(mod18).Again the result follows immediately from these estimates and Theorem3.1.Corollary3.3.The constant1/54that appears in the exponent in Corollary3.2may be improved to2/81for n≡1,19,25or27(mod54).Proof.This follows by reapplying the n→3n−2and n→3n recursive constructions for triangulations as indicated in[2]and[9].Remark3.1.A new recursive construction for triangulations by two of the present authors [6]takes a face2-colourable triangulation of K n and produces a face2-colourable triangulation of K3n without the need for the original triangulation to have a parallel class.This enables us to extend the result of Corollary3.2to include n≡3(mod18)and,by reapplication,to extend the result of Corollary3.3to include n≡3,7,9and21(mod54).It is also possible to use some of the other constructions given in[9]to obtain lower bounds of the form2an2−o(n2)for the number of Hamiltonian embeddings of K n for certain values of n within the remaining residue classes.References1.G.K.Bennett,‘Topological embeddings of Steiner triple systems and associated problems in designtheory’,PhD Thesis,The Open University,2004.2. C.P.Bonnington,M.J.Grannell,T.S.Griggs and J.ˇSir´aˇn,‘Exponential families of nonisomorphictriangulations of complete graphs’,bin.Theory Ser.B78(2000)169–184.3. C.J.Colbourn and A.Rosa,‘Triple systems’(Clarendon Press,1999).4.P.M.Ducrocq and F.Sterboul,‘On G-triple systems’,Publications du Laboratoire de Calcul del’Universit´e des Sciences et Techniques de Lille,No.103(1978).5.M.N.Ellingham and C.Stephens,‘The nonorientable genus of joins of complete graphs with largeedgeless graphs’,bin.Theory Ser.B,to appear.6.M.J.Grannell and T.S.Griggs,‘Designs and topology’,Surveys in combinatorics2007,LondonMathematical Society Lecture Note Series(Cambridge University Press,to appear).7.M.J.Grannell and V.P.Korzhik,‘Nonorientable biembeddings of Steiner triple systems’,DiscreteMath.285(2004)121–126.8.M.J.Grannell,T.S.Griggs and J.ˇSir´aˇn,‘Surface embeddings of Steiner triple systems’,bin.Des.6(1998)325–336.9.M.J.Grannell,T.S.Griggs and J.ˇSir´aˇn,‘Recursive constructions for triangulations’,J.Graph Theory39(2002)87–107.10.J.L.Gross and T.W.Tucker,Topological graph theory(John Wiley,New York,1987).11.V.P.Korzhik and H.-J.Voss,‘Exponential families of nonisomorphic nonorientable genus embeddingsof complete graphs’,bin.Theory Ser.B91(2004)253–287.452HAMILTONIAN EMBEDDINGS FROM TRIANGULATIONS12.G.Ringel,Map color theorem(Springer,New York,1974).13.J.W.T.Youngs,‘The mystery of the Heawood conjecture’,Graph theory and its applications(ed.B.Harris,Academic Press,1970)17–50.Mike J.Grannell,Terry S.Griggs and JozefˇSir´aˇnDepartment of MathematicsThe Open UniversityWalton HallMilton Keynes MK76AAUnited Kingdomm.j.grannell@t.s.griggs@j.siran@。
数学词汇
附4.GOGO的数学词汇mapimagefixed pointcomposite functionone to one / injectiveonto / surjectivebijectiveinverse functionreciprocaldenominatorsymmetric with respect to the y axis / the origin / the line y=xabscissax/y interceptordinateanalytic geometryparabolahyperbolaconic sections 二次曲线系coefficientspoint-slope formuladirectrix 准线 vertex focuslatus rectum 过焦点平行于准线的弦radius, centertangent linedegenerate 退化major axis / minor axiseccentricity e=c/adifference 差branch 支asymptotes 渐近线focal axispolynomial equationsquadratic polynomial 二次多项式quadratic formuladiscriminant判别式division algorithm / remainder theorem quotientfundamental theorem of algebra multiplicity 重根conjugate radical 共轭根the complex conjugate 共轭复数‘monic (an=1)the rational roots theoremlogarithm 对数GRE用log x表示lnx trigonometry 三角几何complementary 互余cos = complementary sinetangent / cotangent / secant / cosecant terminal side 终边quadrant 象限arbitrary angle 钝角trig function 三角函数periodicity 周期性periodequidistant 等距sequence 序列convergent / divergent(minus) infinitymonotonic 单调bounded 有界the sandwich (or squeeze) theorem approach A from above (右逼近A) continuous functionThe Intermediate Value Theorem 中值定理derivative 导数secant line 割线tangent line 切线normal line 法线differential 微分的linear appropriationimplicit differentiation 隐函数求导concave up (convex) f’’>0concave down (concave) f’’<0inflection point 拐点local minimum / absolute minimum critical point / stationary point (f’=0)nth-derivative test fn>0 极小,反之极大adjacent sides 毗连的边relate rates dy/dt= r dx/dtindefinite integration 不定积分intersect 曲线相交rectangular (or Cartesian) coordinates polar coordinatescardioids 心形线r=2a(1+cos(sita)) solids of revolution 旋转体infinite series 无穷极数harmonic seriesp-seriesalternation seriespower seriesthe radius of convergencethe interval of convergencearccosine functionarcsine functiondomainadjoint 伴随阵determinantexpected valueprobability density functionderivativeinflection pointrankeigenvalueeigenvetoreigenspacesubsetpolyhedron 多面体vertices / vertexinverse of the matrixorthogonal 正交height 多项式系数绝对值和+最高次tracepolynomialidempotent 幂等A2=Anilpotent 幂零scalar 数量阵fixed pointthe qth roots of unitycoset 陪集dot/scalar product 点积projAB B在A的投影cross producttriple scalar product (A*B)•Cmagnitude 模parametric equation 参数方程symmetric equation (直线)对称式generator, elements cracking p111arbitrarylevel curve of height 等高线contour curve 轮廓线(被平面截的截面)hyperboloid 双曲面circular poraboloidcylindrical coordinatesspherical coordinatespartial derivativedirectional derivativesgradientsaddle point cracking p131 Hessian matrixline integralThe Fundamental Theorem of Calculus for Line Integral 势场内线积分只与起止点有关gradient field My=Nx conservative 值与路值无关Green Theorem cracking p152ordinary/partial differential equation (ODE/PDE)homogeneous of degree n n阶齐次exact differentialintegrating function 积分因子inconsistent (线性方程组)无解commutative 交换的invertible 可逆的associative 传递性coefficient matrixaugmented matrix 增广矩阵Gaussian Eliminationechelon formparameter 参数nullspacelinear combinationspan 几个向量的所有线性组合trivial combination即linearly independent basis a minimal spanning set for avector spacedimension 基中向量数normal vector 法向量column space / row spaceLaplace expansions 即按某行/列展开adjugate matrix 共轭矩阵Cramer’s Rule克莱莫法则scalar 数乘linear operation=linear transformation kernel / nullity / range / rankRank plus Nullity TheoremCayley-HamiltonTheorem p(A)=0 divisibility, factor, multipleprime number, compositegreatest common divisor (gcd)least common multiple (lcm)the congruence equation ax=b(mod n)the Euclidean Algorithm 欧氏算法cracking p222congruence 余数binary operation on S S*S S associate :a•(b•c)=(a•b)•c semigroup条件identity 单位元semigroup+identity=monoidmonoid+inverse=groupabelian groupgeneral/special linear groupSn symmetric group对称群(阶为n!)S3为最小的6阶非阿贝尔对称群alternating group 置换群(同上)polygon 多边形equilateral triangle 等边三角形isosceles triangle 等腰三角形Dn nth dihedral group :order(Dn)=2n additive group of integers modulo n multiplicative group of integers modulo p cyclic groupKlein four-group, or viergruppeproper subgroupnontrivial subgroupgenerators 生成元finitely generatedisomorphism 同构homomorphism 同态monomorphism 单同态epimorphism 满同态endomorphism 自同态automorphism 自同构direct product (a, b) cracking p237 direct sum 同上if abelian elementary divisors/ invariant factors cracking p238normal subgruoup 正规子群inner automorphism induced by aunity 环乘法单位元unit 存在乘法逆的非零元素ring with unity 幺环commutative ringsubringcharacteristicring of integersr ing of integers modulo n (Zn, +, •)ring of Gaussian integers Z(i)ring of polynomials in x over R R[x] ring of real-valued functions on R RR 交换幺环evaluation (or substitution) homomorphism at a cracking p249Frobenius endomorphism f(a)=app is a prime numberbinomial theorem 二项式定理integral domain 整环left/right zero divisor 零因子cancellation law a!=0, ac=ab, them c=bdivision ring 无零因子的环field= commutative division ring又,有限整环是域strictly-skew field= noncommutative division ring体real quatenion 四元素体Boolean ring 该环中元素idempotentsubset > supersetuniversal setcomplement of B relative to A A-Bunion / intersectionsymmetric difference (A-B)U(B-A) Cartesian product 笛卡尔积open / closed intervalcardinality (cardinal number) 元素数countably infinitealgebraic numbers cracking p267power set of Alevels of infinitycardinal number of continuum transcendental numberscombination, permutationbinomial coefficientpigeonhole principle 抽屉原理probabilityBoolean algebra (or algebra) of sets on S: E 指the power set of S 的子集probability measure on E cracking p274 distribution functionvariance, standard deviationthe normal distribution 正态分布standard normal distributionbinomial distribution 二项分布imaginary unit iprinciple argument 幅角主值sample space (S), outcomes (S中元素), events(E中元素,S的子集)independent独立, mutually exclusive相斥Bernoulli trialspolar form, exponential formprincipal logarithmprincipal value of zwhyperbolic function 双曲函数Laplace equation / harmonic uxx+uyy=0 entire function 在复平面内解析disk of convergencepunctured open disk cracking p312 singularity, isolated singularitypole of order nsimple pole (n=1) double pole (n=2) essential singularityannulus 环面singular (or principal ) part / analytic part residueHausdorff spaceindiscrete / trivial topologyinterior, exterior, boundary, limit point, closureinterior+boundary=closurelower-limit topology B=[a,b) connectedcovering, open coveringcompactnessnorm of a point cracking p290 Euclidean metric 欧氏度量square metricopen map != continuous 一来一去,方向反homeomorphism = continuous + open map upper bound, bounded abovelub=suremum (sup)glb=infimum (inf)complete space = no holesLebesgue measurable setssingletonLebesgue measurable function Lebsegue integrablestep function cracking p296 index of a group 子群中元素的最小公共阶tangent 相切loop 循环inradius 内径trajectory 轨迹centroid 重心clusterpartial fraction expansionsufficient / necessary condition。
Trace anomalies and chiral Ward identities

a r X i v :h e p -p h /0403173v 2 2 J u n 2006Trace anomalies and chiral Ward identitiesJi-Feng YangDepartment of Physics,East China Normal University,Shanghai 200062,China In a simple abelian spinor field theory,the canonical trace identities for certain axial-vector and axial-scalar operators are reexamined in dimensional regularization,some disagreements with previous results are found and an interesting new phenomenon is observed and briefly discussed.It is well known that chiral anomaly has direct physical and topological connections [1]and similarly for trace anomaly [2–4],such anomalies are often termed as quantum mechan-ical violation of classical symmetries,specifically,via the regularization effects in quantum field theories.That is,the quantization procedure is incompatible with such symmetries.In ’t Hooft’s seminal interpretation,chiral anomaly has also been shown to arise from the decoupling of heavy fermions [5],namely,chiral anomaly is closely related to dynamical contents.Therefore,chiral and other anomalies have become the key concern for model construction both in field theories [6]and string theories [7].Thus anomalies in canonical relations are very important in field theories and high energy physics,their appearances are often helpful in deepening our understanding of the quantum theories.In this letter,we examine the trace anomalies with an emphasis on the relation between the trace and the chiral identities for certain axial operators,as they are important in modern particle physics,especially in the supersymmetric field theories [8].Specifically,we examinethe trace and chiral relations satisfied by the two-and three-point functions of operators j 5µ≡¯ψγµγ5ψ,j 5≡2im ¯ψγ5ψ,θ≡m ¯ψψ,and σ≡4m ¯ψψcomputed in dimensional regularization.The non-abelian ones have been examined in Ref.[4]through partial calculation.Here we carry out all the one loop calculations which are in fact very simple and then examine explicitly the relations satisfied by these quantities.The objects to be calculated are listed as follows,Π5µν(p,−p )≡i FT { 0|T (j 5µj 5ν)|0 },(1)∆5µν(0,p,−p )≡FT { 0|T (θj 5µj 5ν)|0 };(2)Π5ν(p,−p )≡i FT { 0|T (j 5j 5ν)|0 },(3)∆5ν(0,p,−p )≡FT { 0|T (θj 5j 5ν)|0 };(4)Π5(p,−p )≡i FT { 0|T (j 5j 5)|0 },(5)∆5(0,p,−p )≡FT { 0|T (θj 5j 5)|0 };(6) σ ≡FT {4m ¯ψψ},(7)Πθσ(0,0)≡−i FT { 0|θσ|0 },(8)where FT {···}denotes the Fourier transform and m refers to the fermion mass.The canonical identities for trace relation and chiral symmetry that should be satisfied by the above vertex functions [4]are as follows,∆5µν(0,p,−p )=(2−p∂p )Π5µν(p,−p ),(9)∆5ν(0,p,−p )=(2−p∂p )Π5ν(p,−p ),(10)∆5(0,p,−p)=(2−p∂p)Π5(p,−p);(11)−ipµ∆5µν(0,p,−p)=∆5ν(0,p,−p)+Π5ν(p,−p),(12)ipν∆5ν(0,p,−p)=∆5(0,p,−p)+Π5(p,−p)+Πθσ(0,0),(13)−ipµΠ5µν(p,−p)=Π5ν(p,−p),(14)ipνΠ5ν(p,−p)=Π5(p,−p)+ σ .(15) Thefirst three are canonical trace identities and the rest are canonical chiral Ward identities.After some calculations in dimensional regularization we obtain the following one-loop results for the interested objects:Π5µν(p,−p)=2gµν4πµ2−Γ(ǫ)−1)]−2m2[∆0+lnm24π2{2 10dx(1−x)2[ln D2π2{2Γ(ǫ)−lnm2∆}+m2pµpν∆);(17)Π5ν(p,−p)=im2pν2π2(∆0−Γ(ǫ)+2m22π2{2m2(lnm2π2{2(lnm2∆};(21)σ =m44πµ2),(22)Πθσ(0,0)=3m44πµ2),(23)with D=m2+p2(x2−x),∆0= 10dx ln D∆= 10dx6π2(gµνp2−pµpν)−m2π2pν,(25)∆5(0,p,−p)=(2−p∂p)Π5(p,−p)−m2π2(26)Now anomalies appear in all the three trace identities.That means in dimensional regular-ization,the chiral Ward identities are preserved in these three-and two-point functions forthe axial operators considered,but the trace identities are quantum mechanically violated. The above results are obtained without use of the chiral Ward identities,unlike the proce-dures taken in Ref.[4].To compare our results with previous ones and to check if the chiral Ward identities are consistent with these anomalous trace identities,we follow the proce-dures of Ref.[4].We should also note that these anomalous identities still hold even after minimal-like subtraction,that is,they are valid for both unrenormalized and renormalized vertex functions.That is,we apply the relations Eq.s(12,13,14,15)to thefirst of the anomalous equation to derive the other two.Noting that2m46π2(gµνp2−pµpν)−m2π2pν,(29)∆5(0,p,−p)=(2−p∂p)Π5(p,−p)−m28π2while here in Eq.(28)it is1π2p2and3 σ −Πθσ(0,0)are anomalies.However,the latter is required by andexplicable within the chiral Ward identities and its existence is independent of regularizationor short distance physics,thus wefind an interesting phenomenon:the canonical terms in chiral identity become anomalies in trace identity.To our knowledge,this phenomenon has not yet been reported infield theory and high energy physics literature.It is knownthat in supersymmetricfield theories,the gaugefield components from the trace anomalies (∼tr(F2))and from chiral anomalies(∼tr(F F))comprise a supermultiplet and hence share the same coefficient[9],thus chiral’symmetry’and scale’symmetry’are closely related insupersymmetric contexts.Here we encountered another phenomenon between the trace identities and chiral identities,in the axial scalar sectors as the’current’density j5couples to axial scalarfields.The deeper implications of this interestingfinding is not clear for us yet.We refrain from making speculations about it before further investigation is carried out.Whilst we believe that it is worthwhile to pay attention to this stly we mention that this phenomenon is independent of regularization scheme,for we have also calculated all the vertex functions in a general parametrization of regularization schemes and reobtained Eq.(30),for details see[10].In summary,we have investigated the trace identities and chiral identities for certain vertex functions of axial operators,by one loop calculations in dimensional regularizationdirectly.Some disagreements with previous publications and an interesting phenomenon were found.ACKNOWLEDGEMENTThe author is grateful to W.Zhu for his continuing supports and helpful conversations on the topics related to scaling.This work is supported in part by the National Natural Science Foundation of China under Grant No.s1*******and10205004.。
Nonlinear dynamics in one dimension On a criterion for coarsening and its temporal law

a r X i v :c o nd -m a t /0512055v 2 [c o n d -m a t .s t a t -me c h ] 22 F e b 2006Nonlinear dynamics in one dimension:On a criterion for coarsening and its temporal lawPaolo Politi 1,∗and Chaouqi Misbah 2,†1Istituto dei Sistemi Complessi,Consiglio Nazionale delle Ricerche,Via Madonna del Piano 10,50019Sesto Fiorentino,Italy 2Laboratoire de Spectrom´e trie Physique,CNRS,Univ.J.Fourier,Grenoble 1,BP87,F-38402Saint Martin d’H`e res,France(Dated:February 2,2008)We develop a general criterion about coarsening for a class of nonlinear evolution equations de-scribing one dimensional pattern-forming systems.This criterion allows one to discriminate between the situation where a coarsening process takes place and the one where the wavelength is fixed in the course of time.An intermediate scenario may occur,namely ‘interrupted coarsening’.The power of the criterion on which a brief account has been given [P.Politi and C.Misbah,Phys.Rev.Lett.92,090601(2004)],and which we extend here to more general equations,lies in the fact that the statement about the occurrence of coarsening,or selection of a length scale,can be made by only inspecting the behavior of the branch of steady state periodic solutions.The criterion states that coarsening occurs if λ′(A )>0while a length scale selection prevails if λ′(A )<0,where λis the wavelength of the pattern and A is the amplitude of the profile (prime refers to differentiation).This criterion is established thanks to the analysis of the phase diffusion equation of the pattern.We connect the phase diffusion coefficient D (λ)(which carries a kinetic information)to λ′(A ),which refers to a pure steady state property.The relationship between kinetics and the behavior of the branch of steady state solutions is established fully analytically for several classes of equations.An-other important and new result which emerges here is that the exploitation of the phase diffusion coefficient enables us to determine in a rather straightforward manner the dynamical coarsening exponent.Our calculation,based on the idea that |D (λ)|∼λ2/t ,is exemplified on several nonlinear equations,showing that the exact exponent is captured.We are not aware of another method that so systematically provides the coarsening exponent.Contrary to many situations where the one dimensional character has proven essential for the derivation of the coarsening exponent,this idea can be used,in principle,at any dimension.Some speculations about the extension of the present results are outlined.PACS numbers:05.70.Ln,05.45.-a,82.40.Ck,02.30.JrI.INTRODUCTIONPattern formation is ubiquitous in nature,and espe-cially for systems which are brought away from equi-librium.Examples are encountered in hydrodynam-ics,reaction-diffusion systems,interfacial problems,and so on.There is now an abundant literature on this topic [1,2].Generically,the first stage of pattern for-mation is the loss of stability of the homogeneous solu-tion against a spatially periodic modulation.This gen-erally occurs at a critical value of a control parameter,µ=µc (where µstands for the control parameter)and at a critical wavenumber q =q c .The dispersion rela-tion about the homogeneous solution (where perturba-tions are sought as e iqx +ωt ),in the vicinity of the critical point assumes,in most of pattern-forming systems,the following parabolic form (Fig.1,inset)ω=δ−(q −q c )2(1)δcorresponding to unstable modes (Fig.1),so that infinitesimal perturbations grow exponentially with time until nonlinear effects can no longer be ignored.In the vicinity of the bifurcation point (δ=0)only the princi-pal harmonic with q =q c is unstable,while all other har-monics are stable.For example,Rayleigh-B´e nard convec-tion,Turing systems,and so on,fall within this category,and their nonlinear evolution equation is universal in the vicinity of the bifurcation point.If the field of interest (say a chemical concentration)is written as A (x,t )e iq c x ,where A is a complex slowly varying amplitude,then A obeys the canonical equation∂t A =A +∂xx A −|A |2A(2)where it is supposed that the coefficient of the cubic term is negative to ensure a nonlinear saturation.Because the band of active modes is narrow and centered around the principal harmonic,no coarsening can occur,and the pat-tern will select a given length,which is often close to that of the linearly fastest growing mode.However,the ampli-tude equation above exhibits a phase instability,known under the Eckhaus instability [1],stating that among theband ofallowed states,|∆q|=√δ/3are stable withrespect to a wavelength modulation.There are many other situations where the bifurca-tion wavenumber q c→0and therefore a separation ofa slow amplitude and a fast oscillation is illegitimate.Contray to the case(1),where thefield can be writtenas A(x,t)e iq c x with A being supposed to vary slowly inspace and time,if q c→0the supposed fast oscillation,e iq c x,becomes slow as well and a separation of A doesnot make a sense anymore.In this case,a generic formof the dispersion relation is(Fig.2,main)ω=δq2−q4.(3)A third situation is the one where the dispersion relationtakes the form(Fig.2,inset)ω=δ−q2.(4)In both cases,Eqs.(3,4),the instability occurs forδ>0,and the band of unstable modes extends from q=0toq=√1In case(4)an equation similar to(2)may arise,but it describesthe fullfield and not just the envelope.is c(dotted line).Forδ>0,the unstable band extends fromq=q1to q=q2(full line).With increasingδthe unstableregion widens(dashed line).The parabolic shape ofω(q)isan approximation,valid close to its maximum.This applies,e.g.,to the dispersion curve(38)of the Swift-Hohenberg eq.(see the mainfigure):ω=δ−(1−q2)2[q c=1].Whenδ=1(dashed line)the unstable band extends down to q=0andω(q)resembles the dispersion curve of the Cahn-Hilliard eq.(see(3)and Fig.2).(δ<0).Full line:just above threshold.Dashed line:wellabove threshold.The vanishing ofω(0)for anyδis a con-sequence of the traslational invariance of the CH eq.in the‘growth’direction.Inset:The Ginzburg-Landau eq.is onecase where such invariance is absent and the dispersion curvehas the form(4):ω=δ−q2.which leads to spatio-themporal chaos.Note that by set-ting u=∂x h we obtain an equivalent form of this equa-tion,namely∂t h=−∂xx h−∂xxxx h+(∂x h)2/2.Thisequation arises in several contexts:liquidfilmsflowingdown an inclined plane[5],flame fronts[7],stepflowgrowth of a crystal surface[3].Complex dynamics such as chaos,coarsening,etc...,are naturally expected if modes of arbitrarily large wave-length are unstable.However,these dynamics may occurfor systems characterized by the dispersion relation(1)3as well,if the system is further driven away from the critical point(i.e.,if q2≫q1,see Fig.1)because higher and higher harmonics become active.We may expect, for example,coarsening to become possible up to a total wavelength of the order of2π/q1.For systems which are at global equilibrium the nonlin-earity u∂x u is not allowed,and a prototypical equation having the dispersion relation(3)is the Cahn-Hilliard equation∂t u=−∂xx[u+∂xx u−u3].(6) The linear terms are identical to the KS one,and the dif-ference arises from the nonlinear term.Note that if dy-namics is not subject to a conservation constraint,(−∂xx) on the right hand side is absent,and the dispersion rela-tion is given by Eq.(4).The resulting equation is given by(2)for a real A and it is called real Ginzburg-Landau (GL)equation or Allen-Cahn equation.The KS equation,or its conserved form(obtained by applying∂xx on the right hand side),was suspected for a long time to arise as the generic nonlinear evolution equation for nonequilibrium systems(the quadratic term is non variational in that it can not be written as a func-tional derivative)whenever a dispersion relation is of type (3).Several recent studies,especially in Molecular Beam Epitaxy(MBE),have revealed an increasing evidence for the occurrence of completely new types of equations,with a variety of dynamics:besides chaos,there are ordered multisoliton[8,9]solutions,coarsening[10],freezing of the wavelength accompanied by a perpetual increase of the amplitude[11].Moreover,equations bearing strong resemblance with each other[12]exhibit a completely different dynamics.Thus it is highly desirable to extract some general criteria that allow one to discriminate be-tween various dynamics.A central question that has remained open so far, and which has been the subject of a recent brief expo-sition[13],was the understanding of the general condi-tions under which dynamics should lead to coarsening, or rather to a selection of a length scale.In this paper we shall generalize our proof presented in[13]to a larger number of classes of nonlinear equations,for which the same general criterion applies:the sign of the phase dif-fusion coefficient D is linked to a property of the steady state branch.More precisely,the sign of D is shown to be the opposite of the sign ofλ′(A),the derivative of the wavelengthλof the steady state with respect its ampli-tude A.Therefore,coarsening occurs if(and only if)the wavelength increases with the amplitude.Another important new feature that constitutes a sub-ject of this paper,is the fact that the exploitation of the phase diffusion coefficient D(λ)will allow us to derive an-alytically the coarsening exponent,i.e.the law according to which the wavelength of the pattern increases in time. For all known nonlinear equations whose dispersion rela-tion has the form(3)or(4)and display coarsening,we have obtained the exact value of the coarsening expo-nent,and we predict exponents for other non exploited yet equations.An important point is that this is expectedto work at any dimension.Indeed,the derivation of the phase equation can be done in higher dimension as well.If our criterion,based on the idea that|D(λ)|∼λ2/t, remains valid at higher dimensions,it should become aprecious tool for a straightforward derivation of the coars-ening exponent at any dimension.II.THE PHASE EQUATION METHODA.GeneralityCoarsening of an ordered pattern occurs if steady state periodic solutions are unstable with respect to wave-lengthfluctuations.The phase equation method[14]al-lows to study in a perturbative way the modulations ofthe phaseφof the pattern.For a periodic structure of periodλ,φ=qx,where q=2π/λis a constant.If weperturb this structure,q acquires a space and time de-pendence and the phaseφis seen to satisfy a diffusion equation,∂tφ=D∂xxφ.The quantity D,called phasediffusion coefficient,is a function of the steady state so-lutions and its sign determines the stable(D>0)orunstable(D<0)character of a wavelength perturba-tion.A negative value of D induces a coarsening process,2whose typical time and length scales are related by |D(λ)|∼λ2/t,as simply derived from the solution of the phase diffusion equation:this relation allows tofindthe coarsening lawλ(t).Therefore,the phase equation method not only allows to determine if certain classes of partial differential equations(PDE)display coarsen-ing or not;it also allows tofind the coarsening laws, when D<0.In the rest of this section,we are going to offer a short exposition of the phase equation method without referring to any specific PDE.Explicit evolution equations will be treated in the next sections,with some calculations relegated to the appendix.Let us consider a general PDE of the form3∂t u(x,t)=˜N[u](7)where˜N is an unspecified nonlinear operator,which is assumed not to depend explicitly on space and time. u0(x)is a periodic steady state solution:˜N[u0]=0and u0(x+λ)=u0(x).When studying the perturbation of a steady state,it is useful to separate a fast spatial variable from slow time and space dependencies.The stationary solution u0does4 not depend on time and it has a fast spatial dependence,which is conveniently expressed through the phaseφ=qx.Once we perturb the stationary solution,u=u0+ǫu1+...,(8)the wavevector q=∂xφgets a slow space and time de-pendence:q=q(X,T),where X=ǫx and T=ǫαt.Because of the diffusive character of the phase variable,the exponentαis equal to two.Space and time deriva-tives now read∂x=q∂φ+ǫ∂X(9a)∂t=ǫ(∂Tψ)∂φ(9b)where the second order term in the latter equation(ǫ2∂T)has been neglected.Finally,along with the phaseφit isuseful to introduce the slow phaseψ(X,T)=ǫφ(x,t),sothat q=∂Xψ.Replacing the u−expansion(8)and the derivates(9)with respect to the new variables in Eq.(7),wefind anǫ−expansion which must be vanished term by term.Thezero order equation is trivial,˜N0[u0]=0:this equation isjust the rephrasing of the time-independent equation interms of the phase variableφ(the subscript in˜N0meansthat Eqs.(9)have been applied at zero order inǫ,i.e.∂x=q∂φ).Thefirst order equation is more complicated,becauseboth the operator˜N and the solution u areǫ−expanded.On very general grounds,we can rewrite∂t u(x,t)=˜N[u]asǫ(∂Tψ)∂φu0=(˜N0+ǫ˜N1)[u0+ǫu1](10)where˜N1comes fromfirst order contributions to thederivatives(9).If we use the Fr´e chet derivative[15],˜L0,defined through the relation˜N0[u0+ǫu1]=˜N0[u0]+ǫ˜L0[u1]+O(ǫ2)(11)we get˜L0[u1]=(∂Tψ)∂φu0−˜N1[u0]≡g(u0,q,ψ).(12)Atfirst order,therefore,we get an heterogeneous linearequation(the Fr´e chet derivative of a nonlinear operatoris linear).The translational invariance of the operator˜N guarantees that∂φu0is solution of the homogeneousequation:according to the Fredholm alternative theo-rem[16],a solution for the heterogeneous equation mayexist only if g is orthogonal to the null space of the ad-joint operator˜L†.In simple words,if˜L†[v]=0,v and gmust be orthogonal.This condition,see Eq.(12),readsv,∂φu0 ∂Tψ= v,˜N1[u0] ,(13)where4 f,g =(2π)−1 2π0dφf∗g.5 If we define w=vG(u0),the equation˜L†0[v]=0is iden-tical to˜L0[w]=0,so that we can choose w=∂φu0andv=∂φu0/G(u0).The orthogonality condition between v and g reads(∂Tψ) v,∂φu0 −(∂X Xψ) v,G(u0)(2q∂q+1)∂φu0 =0(22)and replacing the explicit expression for v,we get thephase diffusion equation∂Tψ=D∂X Xψ(23)withD=∂q q(∂φu0)2G(u0)≡D12π λ0dx(u′0)2=J2π∂J4π2 ∂λ4π2B(A)∂A−1(26)where A is the amplitude of the oscillation,i.e.the(pos-itive)maximal value for u0(x).If G(u)≡1,a compact formula for D isD=−λ2B(A)2,called the most unstable wavevector.The linear regime corresponds to an exponential unsta-ble growth of such mode,with a rateω(q u),followed by a logarithmic coarsening.5The above equation can be made of wider application by considering the following generalized Cahn-Hilliard (gCH)equation∂t u=−C(u)∂xx[B(u)+G(u)u xx].(29)In Sec.III D we will discuss thoroughly the coarsening of this class of models,because of its relevance for the crystal growth of vicinal surfaces.6In that case,the local height z(x,t)of the steps satisfies the equation∂t z=−∂x{B(m)+G(m)∂x[C(m)∂x m]}(30) where m=∂x z.If we pass to the new variable u(m)= m0dsC(s)and take the spatial derivative of the above equation,we get the gCH equation(29).It is worthnoting that steady states are given by the equa-tion B(u0)+G(u0)u′′0=j0,where j0is a constant de-termined by the condition u0 =m0that imposes the (conserved)average value of the order parameter.If steps are oriented along a high-symmetry orientation, m0=0=j0.In the following we are considering this case only,so the equation determining steady states, B(u0)+G(u0)u′′0=0,is the same as for the gGL equa-tion.If we proceed along the lines explained in Sec.II A and keep in mind notations used in Sec.II B1,thefirst order equation in the small parameterǫreads−q2∂φφ˜L0[u1]=(∂Tψ)∂φu0C(u0) (∂Tψ)(33) +q2 v,∂φφ[G(u0)(2q∂q+1)∂φu0] (∂X Xψ)=0.6The quantity multiplying(∂X Xψ)can be rewritten as v,∂φφ[G(u0)(2q∂q+1)∂φu0 =∂φu0v,∂φu0˜D2.(35) In App.B we prove that the denominator˜D2is always positive.If C and G are(positive)constants the proof isstraightforward,because− v∂φu0 = (∂φv)u0 = u20 . The diffusion coefficient(35)for the gCH equation istherefore similar to the diffusion coefficient(24)for the nonconserved gGL equation:their sign is determined by the increasing or decreasing character ofλ(A),the wave-length of the steady state,with respect to its amplitude. The q2term in the numerator of(35)is evidence of the conservation law,i.e.,of the second derivative∂xx in Eq.(29).The denominators D2and˜D2differ:this is irrelevant for the sign of D,but it is relevant for the coarsening law.If C(u)≡G(u)≡1,formulas simplify:D1=−λ3B(A)/4π2(∂Aλ)and˜D2= u20 =I/λ,where I= u20(x)has the same role as J= (∂x u0)2in the non-conserved model.Putting everything together we obtain D=−λ2B(A)1−√1+√2).The most unstable wavevector is q u=1for anyδ.For smallδthe unstable band is narrow;in fact,forδ<0.36,q1>q2/2and period doubling is not allowed.In other words study-ing coarsening for the Swift-Hohenberg equation close to the thresholdδ=0is not very interesting:nonetheless we will write the phase diffusion equation for anyδand for a generalized form of the Swift-Hohenberg equation as well.The zero order equation is easy to write˜N0[u0]≡−q4∂4φu0−2q2∂2φu0−(1−δ)u0−u30=0(39) and thefirst order equation has the expected form ˜L0[u1]=g,where˜L0≡−q4∂4φ−2q2∂2φ−(1−δ)−3u20(40) is the Fr´e chet derivative of˜N0andg≡(∂Tψ)∂φu0(41)+2(∂X Xψ)[(2q3∂q+3q2)∂3φu0+(2q∂q+1)∂φu o]. The operator˜L0is self-adjoint,so the solution of the homogeneous equation˜L†0[v]=0is immediately found, because of the translational invariance of˜N0along x: v=∂φu0.We therefore have(∂Tψ) (∂φu0)2 =(42)−(∂X Xψ)[ ∂φu0(4q3∂q+6q2)∂3φu0+2 ∂φu0(2q∂q+1)∂φu0 ].It is easy to check that both terms appearing in square brackets on the right hand side can be written as∂q(...):∂φu0(4q3∂q+6q2)∂3φu0 =−∂q 2q3(∂2φu0)2 (43a)∂φu0(2q∂q+1)∂φu0 ]=∂q q(∂φu0)2 (43b) so that the phase diffusion coefficients readsD=∂q[2q3 (∂2φu0)2 −2q (∂φu0)2 ]2 (∂φu0)2n(−1)k+1nc n∂q q n−1(∂n/2φu0)2 (46)The standard Swift-Hohenberg equation corresponds to c2=−2and c4=1.The quantity(−1)k+1nc n q n−1/2 therefore gives2q3for n=4ans−2q for n=2,as shown by Eq.(44).7 III.THE COARSENING EXPONENTWe now want to use the results obtained in the previ-ous section for the phase diffusion coefficient D in orderto get the coarsening lawλ(t).In one dimensional sys-tems,noise may be relevant and change the coarseninglaw.In the following we will restrict our analysis to thedeterministic equations.A negative D implies an unstable behavior of the phasediffusion equation,∂tψ=−|D|∂xxψ,which displays anexponential growth(we have reversed to the old coordi-nates for the sake of clarity):ψ=exp(t/τ)exp(2πix/λ),with(2π)2|D|=λ2/τ(in the following the time scaleτwill just be written as t).The relation|D(λ)|≈λ2/t willtherefore be used to obtain the coarsening lawλ(t):itwill be done for several models displaying the scenario ofperpetual coarsening(i.e.,λ′(A)>0for divergingλ).A.The standard Ginzburg-Landau andCahn-Hilliard modelsIt is well known[17]that in the absence of noise,boththe nonconserved GL equation(15)and the conservedCH equation(28)display logarithmic coarsening,λ(t)≈ln t.Let us remind that steady states correspond to thetrajectories of a classical particle moving in the potentialV(u)=u2/2−u4/4.The wavelength of the steady state,i.e.the oscillation period,diverges as the amplitude Agoes to one.This limit corresponds to the‘late stage’regime in the dynamical problem,and the profile of theorder parameter is a sequence of kinks and antikinks.Thekink(antikink)is the stationary solution u+(x)(u−(x))which connects u=−1(u=1)at x=−∞to u=1(u=−1)at x=∞,u±(x)=±tanh(x/√√2)solution,7Q(x)≃Q0exp(7This may also be directly seen by expanding the differential equa-tion∂xx u+u−u3=0about u=1.Expansion to leading orderin Q=1−u yields∂xx Q−2Q=0,from which the solution√ QβQ=Q0e81.The nonconserved caseThe relationλ2J (∂A λ)(50)givest ∼Q −β/2β−2(51)so that λ(t )∼t n with n =(β−2)/(3β−2).2.The conserved caseIf the order parameter is conserved,wesimplyneed to replace J ∼1with I ∼λin Eq.(50),so as to obtaint ∼λλ3β−2β−2.(52)The coarsening exponent is therefore equal to n =(β−2)/(4β−4).We observe that in the limit β→2we recover logarithmic coarsening (n =0)both in the non-conserved and conserved case,as it should be.We also remark that in the opposite limit β→∞we get n =1/3in the nonconserved case and n =1/4in the conserved case,which make a bridge towards the models discussed in the next section.C.Models without uniform stable solutionsThe models considered in the previous subsection have uniform stable solutions,u =±1:the linear instabil-ity of the trivial solution u =0leads to the formation of domains where the order parameter is alternatively equal to ±1,separated by domain walls,called kinks and antikinks.This property is related to the fact that B (u )=u −u 3vanishes for finite u (up to a sign,B (u )is the force in the mechanical analogy for the steady states).In the following we are considering a modified class of models,where B (u )vanishes in the limit u →∞only,so that the potential V (u )= duB (u )does not have maxima at finite u .Therefore,it is not possible to define ‘domains’wherein the order parameter takes a constant value.These models [18],which may be relevant for the epitaxial growth of a high-symmetry crystal surface [10],are defined as follows (α>1):∂t u =B (u )+u xx(53)∂t u =−∂xx [B (u )+u xx ](54)B (u )=u2(α−1)1λ2∼1α−1,which is slighty more complicated,be-cause the asymptotic contribution vanishes for α>2:in this case the finite,constant contribution coming from the motion within the ‘close region’dominates.There-fore,J ∼λ2α+1.Finally,B (A )∼λ1α−2α−1λ1−1α−2α∼λ22.For αlarger than two,λ23α−2.We can sum upour results,λ(t )∼t n ,withn =13α−2α>2(59b)The coarsening exponent varies with continuity from n =1/2for α<2to n =1/3for α→∞.These results confirm what had already been found by one of us with a different approach [18].2.The conserved caseFrom Eq.(36)we haveD ∼λ2λ1λ2α∼14.(61)The constant coarsening exponent n=1/4clashes with numerical results found in Ref.[18],n=1/4for α<2and n=α/(5α−2)forα>2.The opinion of the authors of Ref.[18]is that forα>2a crossover should exist from n=α/(5α−2)to n=1/4,the correct asymptotic exponent.Details and supporting arguments will be given elsewhere[19].D.Conserved models for crystal growthIt is interesting to consider a model of physical interest which belongs to the class of the full generalized Cahn-Hilliard equations,meaning that all the functions B(u), C(u)and G(u)appearing in(29)are not trivial.The starting point is Eq.(30),∂t z=−∂x{B(m)+G(m)∂x[C(m)∂x m]}which describes the meandering of a step,or—more generally—the meandering of a train of steps moving in phase.z is the local displacement of the step with re-spect to its straight position and m=∂x z is the local slope of the step.We do not give details here about the origin of the previous equation,which is presented in[12],but just write the explicit form of the functions B,G and C: B(m)=m1+m2(1+c)(1+m2)3/2(62b)and define the meaning of the two adimensional,positive parameters appearing there:βis the relative strength between the two relaxing mechanisms,line diffusion and terrace diffusion;c is a measure of the elastic coupling between steps.If we pass to the new variable u= m0ds C(s),we get Eq.(29),∂t u=−C(u)∂xx[B(u)+G(u)u xx](29) whose steady states,for high-symmetry steps,are given by the equation u xx=−B(u)/G(u).In App.C we study the potential V(u)= du[B(u)/G(u)]and the dynami-cal scenarios emerging from∂Aλ.We give here the results only.If c=0(see Fig.3),∂Aλ<0,while there is asymptotic coarsening if c>0(see Figs.4,5).Asymptotic coarsening means that∂Aλ>0for large enough A:according to the values of c andβ,λ(A)may be always increasing or it may have a minimum followed by∂Aλ>0:the distinction between the two cases is not relevant for the dynamics and it will not be further considered.Let us now determine the asymptotic behavior of all the relevant quantities,when c>0.In the limit of large m,we have C(m)∼m and B(m)∼1/m.As for G,G(m)∼1/m2and G(m)∼1/m,for V(u)=−√u so that C(u)∼√u and G(u)∼1/u(β=0)or G(u)∼1/√A forβ=0 (Fig.5).Similar and straightforward relations can be determined and the following general expression for the phase diffusion coefficient is established,D∼√λ2∼λ26β=0(64a)λ(t)∼t1B(A)(65a)∂t u=−∂xx[B(u)+u xx]⇒t∼I(∂Aλ)10√|u |3/2for large u and λ′(A )>0(main,full circles).For large amplitude,λ≈A 1/4(main,full line).The dashed line in the inset is the harmonic potential,u 2/2.If c >0there is m 2A (main,full line).The dashed line in theinset is the harmonic potential,u 2/2.For β>0,λ(t )≈t 1/4.Passing from the standard GL/CH models (Sec.III A),to models where V (u )have (non quadratic)maxima at finite u (Sec.III B)and to models where V (u )has no maxima at all at finite u (Sec.III C),the coarsening ex-ponents change with continuity from n =0(logarithmic coarsening)to n =1/2for the nonconserved models and from n =0to n =1/4for the conserved models.The conservation law,as expected,always slows down the coarsening process.Formally,this corresponds to re-place the action J with the quantity I in the denominator of D .In most cases,J is a constant while I increases as λκ,with κ≥1:a smaller D implies a lower coarsening.We remark that only in a very special case (models with-out uniform stable solutions and α<2),I/J ∼λ2:when this happens,the double derivative ∂xx —which charac-terizes the conserved models—is equivalent (as for the coarsening law)to the factor 1/λ2.We stress again that this is an exception,it is not the rule.III D has been devoted to a class of conserved mod-are relevant for the physical problem of a grow-In that case the full expression (35)for D be considered (the result is reported in Eqs.(64a-It is remarkable that for all the models we have we found n ≤1/4and n ≤1/2for conserved models,respectively.It would be inter-to understand how general these inequalities are.9SWIFT-HOHENBERG EQUATION ANDCOARSENINGus start from the standard Swift-Hohenberg equa-tion (37),∂t u =−∂4x u −2∂2x u −(1−δ)u −u 3(66)linear dispersion curve is ω(q )=δ−(q 2−1)2.Thediffusion coefficient (see Eq.(44))isD =2q∂q ( u 2xx − u 2x )2ω′′+(ω′)22ωdqωd ωd 9The condition n ≤1/2for the nonconserved models is equivalent to say that |D (λ)|does not diverge with increasing λ,which seems to be a fairly reasonable condition.11The amplitude A is defined as A=[ dx u2(x)/λ]1/2. vanishes at q=q2and at q=q1,asωdoes,so that A un-dergoes a fold singularity at the center of the band.This is imposed by symmetry,since in the vicinity of threshold the band of active modes is symmetric.In this case we are in the situation with the dispersion relation(1).The phase diffusion coefficient must also be symmetric with respect to the center,and therefore it can change sign at the fold,due to this symmetry.Thus D does not have the sign of A′in this case.Nonetheless,in the vicinity of q2the sign of D is still given by A′,as shown here below. Our speculation is that the existence of a fold is likely to destroy the simple link between D and A′.A meaningful expression for D can be found also for finiteδ,close to q2= δ(let us remind that ω(q1,2)=0and q2>q1).In this limit we getω′(q)≃ω′(q2)=4q2−4q32andD=2(q32−q2)1dq=D E(72)so that D is equal to a positive quantity times dω/dq. Sinceω(q)=A2(q)/2,the sign of D is equal to the sign of dA/dq.This result follows from a perturbative scheme where use has been made of the fact that u∼cos(qx). This is legitimate as long as one considers small devia-tions from the threshold.Ifδis not small,or ifδ=1we fall in the dispersion relation(3).As one deviates from q2towards the center of the band,higher and higher har-monics become active,and one should in generalfind nu-merically the steady state solutions in order to ascertain whether D is positive or negative.In the general case, we have not been able to establish a link between D and the slope of the steady state branch as done in the previ-ous sections.Our belief,on which some evidences will be reported on in the future,is that depending on the class of equations,it is not always the slope of the steady state solution that provides direct information on the nonlinear dynamics,but somewhat a bit more abstract quantities, as we have found,for example,by investigating the KS equation,another question on which we hope to report in the near future[20].Numerical solutions of the SH equation in the limitδ=1reveal a fold singularity inbranchλ(A),as shown in Fig.6.V.EQUATIONS WITH A POTENTIAL Some of the equations discussed in Sec.II B are deriv-from a potential:it is therefore possible to define function F which is minimized by the dynamics.This always the case for the generalized Ginzburg-Landau(16),which can be written as∂t u=B(u)+G(u)u xx=−G(u)δF2(u x)2−V(u) (74)where V(u)is the potential entering in the study of the stationary solutions,i.e.V′(u)=B(u)/G(u).If we eval-uate the time derivative of F wefindd Fδuu t=− dxG(u) δFδu].(76) If C(u)=G(u),wefindd Fδu2≤0.(77)We now want to evaluate F for the steady states.The pseudo free-energy F is nothing but the integral of the Lagrangian function L for the mechanical analogy defin-ing the stationary solutions.If E=(u x)2/2+V(u)is the ‘energy’in the mechanical analogy and J is the action,F[uλ(x)]=ℓJdλ=ℓdλ−E=−ℓJ。
Spacetime at the Planck scale and Path Integral

a r X i v :h e p -t h /9810174v 1 22 O c t 1998Spacetime at the Planck scale and Path IntegralG.ManganoINFN,Sezione di Napoli,Mostra d’Oltremare Pad.20,I-80125Napoli,ItalyE-mail:mangano@na.infn.itWe discuss a path integral formalism to introduce noncommutative generalizations of spacetimemanifold in even dimensions,which have been suggested to be reasonable effective pictures at verysmall length scales,of the order of Planck length.Amor,ch’a nullo amato amar perdona,mi prese del costui piacer s`ıforte,che,come vedi,ancor non m’abbandona.To Carmen I.INTRODUCTION A fascinating open problem of modern physics is a satisfactory understanding of the structure of spacetime at very short length scale,of the order of the Planck length λP ∼10−33cm .On one side the difficulties of quantization of gravity in canonical ways can be only due to technical reasons,and we have simply to wait for new powerful mathematical tools.What is implicit in this possibility is however that the very basic structure of spacetime is a customary manifold with suitable differential and topological structures,which is the arena for interactions among quantized fields.On the other hand,many arguments on operational limits on position and time measurements have been considered in literature [1],suggesting that this description should be modified in a way which is reminiscent of the quantization of phase space in ordinary quantum mechanics.It is worth stressing that,in this case,it is the very notion of manifold which now undergoes a dramatic change.If we adopt a dual point of view,it is well known that the (commutative)algebra of smooth functions over spacetime manifold contains,using Gelf’and–Naimark reconstruction theorem,all informations on the underlying space.Switching on the Planck length then amounts to consider the noncommutative algebra still generated by positions and time X µ,now looked upon as generators with nontrivial commutation relations [X µ,X ν]=iλ2P Q µν,(1.1)where the antisymmetric tensor Q µν,depends,in general,on the X µ.The noncommutative ∗-algebra A ,generated by regular representations of Eq.(1.1),contains all informations on what we may call noncommutative spacetime ,while the geometric picture,which greatly helps in the commutative cases,is lost.The analogy with ordinary quantum mechanics and quantization of phase space strongly suggests to those who are fascinated by the path integral approach,as the author of the present paper is,to establish a path integral formulationof these noncommutative geometries,taking the point of view that a class of linear functionals over A ,which turn into evaluation maps in the commutative limit,can be expressed as integrals,with a suitable measure,of ordinary functions over the classical,commutative spacetime.The reason why such an approach could eventually turn out to be useful is that it relates in a rather simple way the algebra generated by the X µto its commutative counterpart,and this is a powerful way to look for generalization at the noncommutative level of the basic structures of Riemannian geometry:metric,connections and curvature.II.PATH INTEGRAL OVER SPACETIMEWe start considering the pair (M 2n ,Ω),where M 2n is an even-dimensional differentiable manifold and Ωa symplectic form,and introduce the generating functionalZ (x 0,J )=N D [γ]exp iλ−2P ΓΩ+(x,J ) ,(2.1)where N is a normalization constant,J an arbitrary source,the integration is carried over all closed curves γwith base point x 0∈M 2n and Γis any two–dimensional surface with boundary γ.We have also defined(x,J)= γxµ(τ)Jµ(τ)dτ,(2.2)where xµ(τ)is any parameterization ofγ.We here illustrate the basic construction for a manifold with trivial second homology group.The general case will be discussed in section3.We therefore haveΓΩ=γAµ(x)dδJµ1(τ1)...δ2λ2PΩ−1µν(x0).(2.6)As expected the commutator is proportional to the inverse symplectic formΩ−1and using notation of Eq.(1.1),we see that Xµgenerates a noncommutative algebra withρx(Qµν)=Ω−1µν(x0)/2.III.NON-TRIVIAL TOPOLOGIES AND BLACK HOLE AREA QUANTIZATIONIn the case of a manifold M2n with nontrivial second homology group the measure in the integral over closed curves in Eq.(2.1)is,in general,a multivalued function,since the integral ofΩover two surfacesΓandΓ′,both with boundaryγ,may be different ifΓ−Γ′is a non trivial2-cycle.The ambiguity in the choice of the surfaceΓ,however, can be removed by requiring quantization conditions on the integral ofΩover a set of generatorsΓi of H2(M2n)such that exp(i ΓiΩλ−2P)is single valued,analogous to the one introduced to quantize the motion of a particle in thefield of a magnetic charge.Let us consider for example the pair(S2,Ω).The generalization to an arbitrary manifold is straightforward[2]. For any closed curve the measure in the path integral will be always single valued if we require that the integral ofΩover S2is a multiple of2π,in unitλ2PS2Ω=2nπλ2P(3.1)We stress the point that requiring Eq.(3.1)is a consistency condition to construct,via the path integral approach outlined in this paper,a deformation of spacetime,and so it seems to us intimately related to the appearance ofmicroscopic noncommutativity at the Planck scale.Actually,we observe that what we have just discussed could have an intriguing relationship with the idea that black hole horizon area is quantized and its spectrum is uniformly spaced [3].This is in fact what condition(3.1)is stating,if S2represents the black hole horizon area and withΩthe area two-form.Black hole physics is probably one of the best scenarios where the structure of spacetime at small scales, otherwise unobservable,could be felt well above the Planck length.The topological constraint(3.1)may be,perhaps, a clue in the direction of a deep interplay of microscopic noncommutativity and macroscopic phenomena such as black hole mass quantization.。
Non-equidistantM...

Non-equidistant Multivariable Optimizing MGM(1, n) Model Based onImproving Background ValueYouxin Luo, Qiyuan LiuCollege of Mechanical Engineering, Hunan University of Arts and Science, Changde, 415000,P.R.China,***************AbstractBackground value is an important factor affecting the precision of non-equidistant multivariable MGM(1, n) model. Based on index characteristic and integral characteristic of grey model GM(1, 1) and improved the method constructing background value, the function with non-homogeneous exponential law was used to fit the one-time accumulated sequence via three points to obtain the background value of non-equidistant multivariable MGM(1, n) model. A new non-equidistant multivariable optimizing MGM(1, n) model based on improving background value was put forward which takes the first component of the original sequence as initial condition, the mean relative error as objective function and the modified values of response function as initial value. The proposed MGM(1, n) model can be used in equidistance & non-equidistance modeling and has the characteristic of higher precision as well as stronger adaptability. Examples validate the practicability and reliability of the proposed model.Keywords : Multivariable, Background Value, Non-Equidistance Sequence, Optimizing, Non-Equidistance MGM(1, n)Model, Least Square Method1. IntroductionGrey prediction model is an important part in the grey theory and GM(1, 1) model is a basic prediction model in the grey prediction model. GM(1, 1) plays an important role in grey prediction because of the research characteristics such as the small sample and the poor information, so it has been greatly concerned and been widely used. MGM(1, n) model is extended from GM(1, 1) model in the case of n variables, and the parameters of MGM(1, n) model can reflect the relationships of mutual influence and restriction among multiple variables. The MGM(1, n) model was established [1] and the optimizing model of MGM(1, n) was set up by taking the first component of the sequence (1)x as the initial condition of the grey differential equation and modifying [2]. According to new information priority principle in the grey system, multivariable new information MGM(1, n) model taking the n th component of (1)x as initialcondition was established [3]. Taking the n th component of (1)xas initial condition and optimizing the modified initial value and the coefficient of background value q where the form is (1)(1)(1)(1)(1)()i i i z qx k q x k =++-([0,1])q ∈, the multivariable new information MGM(1, n) model was established [4]. These MGM(1, n) models are equidistance or the non-equidistance multivariable MGM(1,n) model with homogeneous exponent function fitting background value [5]. However, establishing model with non-homogeneous exponent function fitting background value is more widespread, so there are inherent defects in the modeling mechanism of this model with homogeneous exponent function fitting background value. The non-equidistance multivariable MGM(1, n) model was established [6], where its background value is generated by mean value so as to bring about lower accuracy. The non-equidistance multivariable MGM(1, n) model based on non-homogeneous exponent function fitting background value was established [7,8], that improves the accuracy of the model. The constructing method for background value is a key factor affecting the prediction accuracy and the adaptability. In order to improve the accuracy of GM(1, 1), some constructing methods for background value were proposed and some non-equidistance GM(1, 1) model were established [9-14]. How to extend GM(1, 1) model to MGM(1, n) model, it is of great significance establishing non-equidistance of MGM(1, n) model with high precision. In this paper, the modeling ideas of non-equidistant GM (1,1) model in [9] was absorbed. Based on index characteristic and integral characteristic ofJournal of Convergence Information Technology(JCIT) Volume8, Number6,Mar 2013 doi:10.4156/jcit.vol8.issue6.106grey model GM(1, 1) and improved the method constructing background value, the function with non-homogeneous exponential law was used to fit the one-time accumulated sequence via three points to obtain the background value of non-equidistant multivariable MGM(1, n) model. A new non-equidistant multivariable optimizing MGM(1, n) model based on improving background value was put forward which takes the first component of the original sequence as initial condition, the mean relative error as objective function and the modified values of response function as initial value. This model can be used in equidistance & non-equidistance model and extend the application range of the grey model. There is higher precision, better theoretical and practical value in this model.2. Non-equidistant multivariable optimizing MGM(1, n) model based on improving background valueDefinition 1: Supposed the sequence (0)(0)(0)(0)(0)12[(),(),,(),,()]i i i i j i m x t x t x t x t =X L L , if1j j j t t t const -∆=-≠ where 1,2,,,2,,i n j m ==L L , n is the number of variables and m is the sequence number of each variable, (0)i X is called as non-equidistant sequence.Definition 2: Supposed the sequence (1)(1)(1)(1)(1)12{(),(),,(),,()}ji i i i j t m x t x t x t x t =X L L , if (1)(0)11()()i i x t x t = and (1)(1)(0)1()()()i j i j i j j x t x t x t t -=+⋅∆ where 2,,,j m =L 1,2,,,i n =L and 1j j j t t t -∆=-, (1)i X is one-time accumulated generation Operation(denoted by 1-AGO) of non-equidistant sequence (0)i X .Supposed the original data matrix:(0)(0)(0)11121(0)(0)(0)(0)(0)(0)(0)2122212(0)(0)(0)12()()()()()(){,,,}()()()m T m n n n n m x t x t x t x t x t x t x t x t x t ⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦X X X X L L L L L L L L (1)where (0)(0)(0)(0)12()[(),(),,()](1,2,)j j j n j t x t x t x t j m ==X L Lis the observation value of each variable at j t , and the sequence (0)(0)(0)(0)12[(),(),,(),,()](1,2,,,1,2,,)i i i j i m x t x t x t x t i n j m ==L L L L is non-equidistant, that is, the distance 1j j t t -- is not constant.In order to establish the model, firstly the original data is accumulated one time to generate a new matrix as:(1)(1)(1)11121(1)(1)(1)(1)(1)(1)(1)2122212(1)(1)(1)12()()()()()(){,,,}()()()m T m n n n n m x t x t x t x t x t x t x t x t x t ⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦X X X X L L L L L L L L (2)where, (1)()(1,2,,)j x t j m =L meets the conditions in Definition 2, that is,(0)1(1)1(0)1()()(2,,)()()(1)ki j j j j ij i x t t t k m x t x t k -=⎧-=⎪=⎨⎪=⎩∑L (3)Non-equidistant multivariable MGM(1, n) model can be expressed as first-order differential equations with n variables:(1)(1)(1)(1)111112211(1)(1)(1)(1)221122222(1)(1)(1)(1)1122n n n n n n n nn n n dx a x a x a x b dt dx a x a x a x b dtdx a x a x a x b dt⎧=++++⎪⎪⎪=++++⎪⎨⎪⎪⎪=++++⎪⎩L L L L (4)Assumed 111212122212n n n n nn a a a aa a a a a ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦A L L L L L L L , 12n b b b ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦B L , Eq.(4) can be expressed as:(1)(1)()()d t t dt=+X AX B (5)Regarded the first component of the sequence (1)()(1,2,,)x i i n =L as the initial conditions of the grey differential equation, the continuous time response of Eq.(5) is as:(1)(1)11()()()t t t e t e -=+-A A X X A I B (6)where, 1!k tk k e t k ∞==+∑A A I , I is a unit matrix.The first column of data in Eq.(6) is taken as the initial value of the solution, and then (0)1()i X t is substituted by (0)1()i i X t β+, where the dimension of 12[,,,]T n βββ=βL is the same asone of (0)1()X t . After restoring the fitting value of the original data is:(0)(0)11(0)(1)(1)11ˆ()()ˆˆˆ()(()())/(),2,3,,i i i ij i j i j j j X t X t X t X t X t t t j m β--⎧=+⎪⎨=--=⎪⎩L (7)In order to identify A and B , Eq.(4) is made the integration in 1[,]j j t t - and we can obtain:1(0)(1)1()()(1,2,,;2,3,,)j j nt ij j il i j i j t l x t t a x t dt b t i n j m -=∆=+∆==∑⎰L L (8)Noting 1(1)(1)()()jj t i j i j t z t x t dt -=⎰, the common formula for background value that is actuallybased on the trapezoidal area (1)()i j j z t t ∆ is appropriate when the time interval is small, that is, the change of sequence data is slow. But when this change is sudden, the background value using the common formula often brings out the larger error, so it is more suitable for Eq.(4) thatparameter matrices ˆA and ˆB estimated by the background value in 1[,]j j t t - are obtained by 1(1)(1)()()j j t i j i j t z t x t dt -=⎰substituting for (1)()i j x t . Based on quasi-exponentially law of the greymodel and the modeling principles and methods in [9], we set that (1)()i B t i i i x t A e C =+, where ,,i i i A B C are the undetermined coefficients.Assumed that the curve (1)()i B t i i i x t A e C =+ passes through three points ((1),()j i j t x t ), ((1)11,()j i j t x t --) and ((1)22,()j i j t x t --), we can obtain:(1)()i jB t i j i i x t A eC =+, 1(1)1()i j B t i j i i x t A eC --=+, 2(1)2()i j B t i j i i x t A eC --=+ (9)Then the undetermined coefficients ,,i i i A B C can be obtained in Eq.(9):1(0)()i j i j i j ji B t B tx t t A e e -⋅∆=- (10)(0)(0)11()ln(3,4,,()i j ji i j j x t t B j m x t t --⋅∆==⋅∆L (11)(1)()i jB t i i j iC x t A e=- (12)That Eqs.(10-12) substituting for the formula for background value 1(1)()jj t i j t x t dt -⎰ can beobtained:112(0)11(1)(1)11(0)(0)1()()()()ln(())ln(())j j i jjt t j i j B tij ii i i j t t i j i i j i t x t z t x dt A eC dt C t x t C x t C +++++++∆==+=+∆---⎰⎰(13)Noting 12(,,,,)(1,2,,)T i i i in i a a a b i n ==a L L , the identified value ˆi aof i a can be obtained by using the least square method:112ˆˆˆˆˆ[,,,,](),1,2,,T i i i in i ia a ab i n -===T T a L L L Y L L (14)where(1)(1)(1)122222(1)(1)(1)132333(1)(1)(1)12()()()()()()()()()n n m m n m m z t z t z t t z t z t z t t z t z t z t t ⎡⎤∆⎢⎥∆⎢⎥=⎢⎥⎢⎥∆⎢⎥⎣⎦L L L L L L L L L (15)(0)(0)(0)2233[(),(),,()]i i i i m m x t t x t t x t t =∆∆∆T Y L (16)Then the identified values of A and B can be obtained:111212122212ˆˆˆˆˆˆˆˆˆˆn n n n nn a a a a a aa a a ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦A L L L L L L L , 12ˆˆˆˆn b b b ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦B L (17)The calculated value in MGM(1, n) is:11ˆˆ()()(1)(1)11ˆˆˆ()()(),1,2,,j j t t t t i j t e t e j m ---=+-=A A X X A I B L (18)After restoring the fitting value of the original data is:(0)(0)11(0)(1)(1)11ˆ()()ˆˆˆ()(()())/(),2,3,,i i i i j i j i j j j X t X t t X t X t t t j mβ--⎧=+⎪⎨=--=⎪⎩X L (19)The absolute error of the i th variable: (0)(0)ˆ()()i j i j xt x t -. The relative error of the i th variable: (0)(0)(0)ˆ()()()*100()i j i j i j i j xt x t e t x t -=.The mean of the relative error of the i th variable: 11()mi j j e t m =∑.The average error of the whole data: 111(())n mi j i j f e t nm ===∑∑.After taking the average error f as the objective function and β as the design variable, and using the optimization function fmincon in Matlab7.6 or other optimization methods to solve, the model should be tested.3. ExamplesExample 1: In the calculation on contact strength, the coefficients a m and b m between the principal curvature function ()F ρ and the radius of the major axis a and the minor b in the ellipse with the point contact is generally obtained by looking-up, and these data are extracted in Table 1 [15]:Table 1. Values of )(ρF , a m and b m)(ρF 0.9995 0.99900.99800.99700.99600.9950a m 23.95 18.53 14.25 12.26 11.02 10.15b m0.163 0.185 0.212 0.228 0.241 0.251 )(ρF 0.9880 0.98700.98600.98500.98400.9830a m 7.25 7.02 6.84 6.64 6.47 6.33b m0.297 0.301 0.305 0.310 0.314 0.317 )(ρF 0.9940 0.99300.99200.99100.99000.9890a m 9.46 8.92 8.47 8.10 7.76 7.49b m0.260 0.268 0.275 0.281 0.287 0.292 )(ρF 0.9820 0.98100.98000.97900.97800.9770a m 6.19 6.06 5.95 5.83 5.72 5.63b m0.321 0.325 0.328 0.332 0.335 0.338Assumed b m as j t , ()F ρ as 1x and a m as 2x , non-equidistant optimizing MGM(1,2) model was established by using the proposed method in this paper. The parameters of this model are as follows: -0.4005 0.0278 5.5745 -7.5183 =A , 0.7306 193.0697=B , 1.9799e-012 0.035118=β.The fitting value of ()F ρ:ˆ()Fρ=[0.9995,0.99732,0.99807,0.9974,0.99629,0.99508,0.9939,0.99269,0.99154,0.99046, 0.98941, .9884,0.98745,0.98657,0.98577,0.98484,0.98388,0.98313,0.98236,0.98146,0.98066,0.97985,0.97903,0.97832 ,0.97736]The absolute error of ()F ρ:q =[3.9599e-012,-0.0016799,6.9349e-005,0.00039845,0.0002857,8.4055e-005,-0.00010488,-0.00030526,-0.00046437,-0.00054021,-0.00058959,-0.00059546,-0.00054581,-0.00042826, -0.00023422,-0.00016429, -0.0001169, 0.00012653, 0.0003561,0.00046026,0.00066337, 0.00085386, 0.0010332,0.00132053]The relative error of ()F ρ (%):e =[3.9619e-010,-0.16815,0.0069487,0.039965,0.028685,0.0084478,-0.010551,-0.030741,-0.046812,-0.054511,-0.059554,-0.060208,-0.055244,-0.04339,-0.023754,-0.016679, -0.011881,0.012872,0.036262,0.046917,0.067691,0.087217,0.10565,0.13516]The mean of the relative error of ()F ρ is 0.04822% and the one of this model is 0.49941%, so thismodel has higher precision. In the model without optimization, the mean of the relative error of ()F ρ is 0.065315% and the one of the model is 0.79897%.Example 2: In the conditions of the load 600N and the relative sliding speeds 0.314m/s, 0.417m/s, 0.628m/s, 0.942m/s and 1.046m/s respectively, the test data of the thin film with TiN coat are shown as in Table 2 [16].Table 2. Test data of the thin film with TiN coatNo.j 1 2 3 4 5Sliding speed (m/s)0.314 0.471 0.628 0.942 1.046 Friction coefficient μ 0.251 0.258 0.265 0.273 0.288Wear rate ω (*10-5mg/m)7.5 8 8.5 9.5 11Assumed sliding speed j t , friction coefficient (0)1X and wear rate (0)2X , non-equidistant optimizing MGM(1,2) model was established by using the proposed method in this paper. The parameters of thismodel are as follows: -1.9742 0.0622 -138.7384 4.5825 =A , 0.29518.6504=B , -3.2375e-005 0.001011=β.The fitting value of: (0)1ˆX =[0.25094,0.2656,0.26536,0.27224,0.28795,0.29535]. The absolute error of (0)1X : q =[-6.4749e-005,0.0076018,0.00035731,-0.00075757,-5.3883e-005]. The relative error of (0)1X (%): e =[-0.025797,2.9464,0.13483,-0.2775,-0.01871].The mean of the relative error of (0)1X is 0.68065% and the one of this model is 0.77138%, so this model has higher precision. In the model without optimization, the mean of the relative error of (0)1X is0.73186% and the one of the model is 0.84773%. When equidistant MGM(1,3) model was used in [16], the mean of the relative error of (0)1X is 1.6225%.4. ConclusionsThe constructing method for background value is a key factor affecting the prediction accuracy and the adaptability. Aimed to non-equidistant multivariable sequence with mutual influence and restriction among multiple variables, based on index characteristic and integral characteristic of grey model GM(1,1) and improved the method constructing background value, the function with non-homogeneous exponential law was used to fit the one-time accumulated sequence via three points to obtain the background value of non-equidistant multivariable MGM(1, n) model. A new non-equidistant multivariable optimizing MGM(1, n) model based on improving background value was put forward which takes the first component of the original sequence as initial condition, the mean relative error as objective function and the modified values of response function as initial value. The proposed MGM(1, n) model can be used in equidistance & non-equidistance and it extents the application scope of grey model. New model has the characteristic of high precision as well as easy to use. Examples validate the practicability and the reliability of the proposed model. There are important practical and theoretical significance and this model should be worthy of promotion.5. AcknowledgmentThis research is supported by the National Natural Science Foundation of P.R. China (No:51075144), the grant of the 12th Five-Year Plan for the construct program of the key discipline (Mechanical Design and Theory) in Hunan province(XJF2011[76]).6. References[1]J. Zhai, J. M. Sheng, “Grey Model and its Application”, Systems Engineering-Theory & Practice,vol. 15, no. 5, pp. 109-113, 1997.[2]Y. X. Luo, J. Y. Li, “Application of Multi-variable Optimizing Grey Model MGM(1,n,q,r) to theLoad-strain Relation”, In Proceedings of The 2009 IEEE International Conference on Mechatronics and Automation (ICMA 2009), pp. 4023-4027, 2009.[3]Z. M. He, Y. X. Luo, “Application of New Information Multi-variable Grey Model NMGM(1, n)to the Load-strain Relation”, In Proceedings of 2009 International Conference on Intelligent Computation Technology and Automation (ICICTA 2009), pp. 11-14, 2009.[4]Y. X. Luo, W. Y. Xiao, “New Information Grey Multi-variable Optimizating ModelNMGM(1,n,q,r) for the Relationship of Cost and Variability”, In Proceedings of 2009 International Conference on Intelligent Computation Technology and Automation (ICICTA 2009), pp. 120-123, 2009.[5] F. X. Wang, “Multivariable Non-equidistance GM(1,m) Model and its Application”, SystemsEngineering and Electronics, vol. 9, no. 3, pp. 388-390, 2007.[6]P. P. Xiong, Y. G. Dang, H. Zhu, “Research of Modeling of Multi-variable Non-equidistantMGM(1,m) model”, Control and Decision, vol. 26, no. 1, pp. 49-53, 2011.[7]P. P. Xiong, Y. G. Dang, Y. Yang, “The Optimization of Background Value in Multi-VariableNon-Equidistant Model”, In Proceedings of the 19th Chinese Conference on Grey Systems, pp.277-281, 2010.[8]L. Z. Cui, S. F. Liu, Z. P. Wu, “MGM(1,m) Based on Vector Continued Fractions Theory”,Systems Engineering, vol. 26, no. 10, pp. 47-51, 2008.[9]Y. X. Luo, W. Y. Xiao, X. Y. Che, et al., “Modeling Research on Non-equidistant OptimumGM(1, 1) Model and its Application Research to Metal Cutting”, In Proceedings of 2009 World Congress on Computer Science and Information Engineering, pp. 643-646, 2009.[10]H. Li, Y. Wei, “GM(1,1) Direct Model of Optimizing Grey Derivative”, Journal of Grey System,vol. 15, no. 3, pp. 127-131, 2012.[11]X. Y. Zeng, L. Shu, “Non-Equidistant GM (1,1) Based on Accumulated Method and ItsProperties”, Journal of Grey System, vol. 15, no. 3, pp. 139-144, 2012.[12]Y. X. Luo, Z. M. He, “The New Non-equidistant Optimum GM(1, 1) of Line-Drawing DataProcessing in Computer Aided Design”, In Proceedings of the 4th International Conference on Computer Science & Education (ICCSE2009), pp. 971-974, 2009.[13]Wuwei Li, “Application of Grey Prediction Theory to Forecast R&D Input within the ChineseHigh-Tech Industries”, IJACT: International Journal of Advancements in Computing Technology, vol. 4, no. 12, pp. 28-35, 2012.[14]Deheng Sun, Ling Gao, Jizhen Li,Lin He,Ruyi Wang, “The Performance Prediction and EarlyWarning of Network Based on Grey Model”, AISS: Advances in Information Sciences and Service Sciences, vol. 3, no. 10, pp. 497-504, 2011.[15]Z. H. Han, H.X. Dong, “Methodology and MGM(1,n) Model of Line Chart Data Processing inComputer Aided Design”, Journal of Machine Design, vol. 25, no. 4, pp. 18-20, 2008.[16]Y. X. Luo, X. Y. Che, “The Grey Multi-variable Optimizing Model and Its Application toAnalysis of the Tribological Behaviors of the Film”, Lubrication Engineering, vol. 33, no. 3, pp.58-61, 2008.。
non-scaled floating point model -回复
non-scaled floating point model -回复什么是非标度(nonscaled)浮点模型?非标度浮点模型是一种计算机科学中用于表示和处理浮点数的方法。
与传统的标度浮点模型不同,非标度浮点模型使用固定的小数点位置,而不是使用可变的尾数。
这种模型的目的是提供高精度的数值计算,减少舍入误差,并且在同等硬件资源下可能提供更高的性能。
非标度浮点模型被广泛应用于科学计算、金融建模、机器学习和其他需要高精度计算的领域。
非标度浮点模型的核心思想是将浮点数表示为一个固定长度的二进制表示,并使用一个固定的小数点位置来表示小数部分。
这种模型的一个重要特点是它可以提供任意精度的计算,不受固定位数的限制。
这意味着它可以在更高的精度下执行数学运算,并且不会丢失任何精度。
在非标度浮点模型中,浮点数表示为一个小数部分和一个指数部分的乘积。
小数部分通常表示为一个正数,小数点固定在最左边的位上,而指数部分表示为一个带符号的整数,用来表示数的大小。
这种表示方法允许浮点数的大小范围更大,同时提供更高的精度。
非标度浮点模型有许多优点。
首先,它可以提供高精度的计算,特别适用于需要进行大量累积误差的情况下。
其次,非标度浮点模型可以在相同的硬件资源下提供更高的计算性能。
因为它使用固定的小数点位置,所以计算的速度更快,不需要进行复杂的位移和对齐计算。
然而,非标度浮点模型也存在一些挑战和限制。
首先,它需要更多的存储空间来表示浮点数,因为它使用了固定的小数点位置。
此外,由于它不使用尾数,它可能无法表示非常小或非常大的数字。
此外,非标度浮点模型的实现较为复杂,需要特殊的硬件支持和算法。
总的来说,非标度浮点模型是一种用于表示和处理浮点数的高精度方法。
它使用固定的小数点位置来表示小数部分,并且可以提供任意精度的计算。
虽然它具有一些限制和挑战,但它在需要高精度计算和更高性能的场景中是一个有价值的选择。
在未来,随着计算机科学的进步,我们可以期待更多使用非标度浮点模型的应用和研究。
On Cr-closing for flows on orientable and non-orientable 2-manifolds

a r X i v :m a t h /0612335v 2 [m a t h .D S ] 7 A u g 2007ON C r −CLOSING FOR FLOWS ON ORIENTABLE AND NON-ORIENTABLE2–MANIFOLDSCARLOS GUTIERREZ AND BENITO PIRESAbstract.We provide an affirmative answer to the C r −Closing Lemma,r ≥2,for a large class of flows defined on every closed surface.1.Introduction This paper addresses the open problem C r Closing Lemma,which can be stated as follows:Problem 1.1(C r Closing Lemma).Let M be a compact smooth manifold,r ≥2be an integer,X ∈X r (M )be a C r vector field on M ,and p ∈M be a non–wandering point of X .Does there exist Y ∈X r (M )arbitrarily C r −close to X having a periodic trajectory passing through p ?C.Pugh [21]proved the C 1Closing Lemma for flows and diffeomorphisms on manifolds.As for greater smoothness r ≥2,the C r Closing Lemma is an open problem even for flows on the 2−torus.Concerning flows on closed surfaces,only a few,partial results are known in the orientable case (see [4,6,10]).No affirmative C r −closing results are known for flows on non–orientable surfaces.In this paper,we present a class of flows defined on every closed surface supporting non–trivial recurrence for which Problem 1.1has an affirmative answer –see Theorem A.Notice that every closed surface distinct from the sphere,from the projective plane and from the Klein bottle (see [15])admits flows with non–trivial recurrent trajectories (see [12]).To achieve our results we provide a partial,positive answer to the following local version of the C r Closing Lemma for flows on surfaces:Problem 1.2(Localized C r Closing Lemma).Let M be a closed surface,r ≥2be an integer,X ∈X r (M )be a C r vector field on M ,and p ∈M be a non–wandering point of X .For each neighborhood V of p in M and for each neighborhood V of X in X r (M ),does there exist Y ∈V ,with Y −X supported in V ,having a periodic trajectory meeting V ?It is obvious that if Problem 1.2has a positive answer for some class of vector fields N ⊂X r (M )then so does Problem 1.1,considering the same class N .The approach we use to show that a flow has local C r −closing properties is to make arbitrarily small C r −twist–perturbations of the original flow along a transversal segment.This requires a tight control of the perturbation:it may happen that a twist–perturbation leaves the non–wandering set unchanged [11]or else collapses it into the set of singularities [4],[7].More precisely:C.Gutierrez [7]proved that local C 2−closing is not always possible even for flows on the 2–torus;C.Carroll [4]presented a flow on the 2–torus with poor C r −closing properties:no arbitrarily small C 2−twist–perturbation yields closing;C.Gutierrez and B.Pires [11]provided a flow on a non–orientable surface of genus four whose1non–trivial recurrent behaviour persists under a class of arbitrarily small C r−twist–perturbations of the originalflow.Deeply related to Problem1.1is the Peixoto–Wallwork Conjecture that the Morse-Smale vector fields are C r−dense on non–orientable closed surfaces,which is implied by the following open problem:Problem1.3(Weak C r Connecting Lemma).Let M be a non–orientable closed surface,r≥2 be an integer,and X∈X r(M)have singularities,all of which hyperbolic.Assume that X has a non–trivial recurrent trajectory.Does there exist Y∈X r(M)arbitrarily C r−close to X having one more saddle–connection than X?M.Peixoto[20]gave an affirmative answer to the Weak C r Connecting Lemma,r≥1,forflows on orientable closed surfaces whereas C.Pugh[22]solved the Peixoto–Wallwork Conjecture in class C1.To give a positive answer to the Peixoto–Wallwork Conjecture,it would be enough to prove either the C r−Closing Lemma or the Weak C r Connecting Lemma for the class G∞(M)of smooth vectorfields having nontrivial recurrent trajectories andfinitely many singularities,all hyperbolic. However there is not a useful classification of vectorfields of G∞(M).Surprisingly,this is not contradictory with the fact that the class F∞(M)of smooth vectorfields having nontrivial recur-rent trajectories andfinitely many singularities,all locally topologically equivalent to hyperbolic ones,is essentially classified.The vectorfields that are constructed to classify F∞(M)haveflat singularities[5].The answer to either of the following questions is unknown(see[16]for related results):(1)Given X∈F∞(M),is there a vectorfield Y∈G∞(M)topologically equivalent to X?(2)Given X∈G∞(M)which is dissipative at its saddles,is there Y∈G∞(M)topologically equivalent to X but which has positive divergence at some of its saddles?Considering vectorfields of G∞(M)which are dissipative at their saddles,their existence in a broad context was considered by C.Gutierrez[8].The motivation of this work was tofind a C r−Closing Lemma for all vectorfields of G∞(M)whose existence is ensured by the work done in[8].In this paper we have accomplished this aim.We do not know any other existence result improving that of[8].2.Statement of the resultsThroughout this paper,we shall denote by M a closed Riemannian surface,that is,a com-pact,connected,boundaryless,C∞,Riemannian2–manifold and by X r H(M)the open subspace of X r(M)formed by the C r vectorfields on M having singularities(at least one),all of which hyper-bolic.When M is neither the torus nor the Klein bottle,X r H(M)is also dense in X r(M).To each X∈X r H(M)we shall associate itsflow{X t}t∈R.Given a transversal segmentΣto X∈X r H(M) and an arc length parametrizationθ:I⊂R→ΣofΣ,we shall perform the identification Σ=θ(I)=I,where I is a subinterval of R.In this way,subintervals of I will denote subsegments ofΣ.If P:Σ→Σis the forward Poincar´e Map induced by X onΣand x belongs to the domaindom(P)of P,we shall denote:DP(x)=D(θ−1◦P◦θ)(θ−1(x)).Notice that DP(x)does not depend on the particular arc length parametrizationθofΣand may take positive and negative values.Given n∈N\{0},we letO−n(∂Σ)={P−i(∂Σ):0≤i≤n−1},where∂Σdenotes the set of endpoints ofΣand P0is the identity map.In this way,the n−th iterate P n is differentiable on dom(P n)\O−n(∂Σ).Definition 2.1(Infinitesimal contraction).LetΣbe a transversal segment to a vectorfield X∈X r H(M)and let P:Σ→Σbe the forward Poincar´e Map induced by X.Given n∈N\{0}and0<κ<1,we say that P n is an infinitesimalκ-contraction if|DP n(x)|<κfor all x∈dom(P n)\O−n(∂Σ).We say that N⊂M is a quasiminimal set if N is the topological closure of a non–trivial recurrent trajectory of X.Definition2.2.We say that X∈X r H(M)has the infinitesimal contraction property at a subset V of M if for every non–trivial recurrent point p∈V,for everyκ∈(0,1)and for every transversal segmentΣ1to X passing through p,there exists a subsegmentΣofΣ1passing through p such that the forward Poincar´e Map P:Σ→Σinduced by X is an infinitesimalκ–contraction.Given a transversal segmentΣto X∈X r H(M)passing through a non–trivial recurrent point of X,we let M P(Σ)denote the set of Borel probability measures onΣinvariant by the forward Poincar´e Map P:Σ→Σinduced by X.We say that a Borel subset B⊂Σis of total measure if ν(B)=1for allν∈M P(Σ).Definition2.3(Lyapunov exponents).We say that X∈X r H(M)has negative Lyapunov exponents at a subset V of M if for each non–trivial recurrent point p∈V and for each transversal segmentΣ1 passing through p,there exist a subsegmentΣofΣ1containing p and a total measure set W⊂Ω+ such that for all x∈W,1χ(x)=lim infn→∞Theorem C.Suppose that X∈X r H(M),r≥2,has the contraction property at a quasiminimal set N.There exists Y∈X r(M)arbitrarily C r−close to X having one more saddle–connection than X.3.PreliminaresA transversal segmentΣto X∈X r H(M)passes through p∈M if p∈Σ\∂Σ.Given p∈M, we shall denote byγp the trajectory of X that contains p.We may writeγp=γ−p∪γ+p as the union of its negative and positive semitrajectories,respectively.We shall denote byα(p)orα(γp) (resp.ω(p)orω(γp))theα−limit set(resp.ω−limit set)ofγp.The trajectoryγp is recurrent if it is eitherα−recurrent(i.e.γp⊂α(γp))orω−recurrent(i.e.γp⊂ω(γp)).A recurrent trajectory is either trivial(a singularity or a periodic trajectory)or non–trivial.A point p∈M is recurrent (resp.non–trivial recurrent,ω−recurrent,...)according to whetherγp is recurrent(resp.non–trivial recurrent,ω−recurrent...).We say that N⊂M is a quasiminimal set if N is the topological closure of a non–trivial recurrent trajectory of X.There are onlyfinitely many quasiminimal sets {N j}m j=1,all of which are invariant.Furthermore,every non–trivial recurrent trajectory is a dense subset of exactly one quasiminimal set.Proposition3.1.Let N be a quasiminimal set of X∈X r H(M).Suppose that for some non-trivial recurrent point p∈N,there exist a transversal segmentΣto X passing through p,(κ,n)∈(0,1)×N, and L>0such that the forward Poincar´e Map P:Σ→Σinduced by X has the following properties:(a)The n-th iterate P n is an infinitesimalκ−contraction;(b)sup{|DP(x)|:x∈dom(P)}≤L.Then X has the infinitesimal contraction property at N.Proof.We claim that(a)for every K∈(0,1)there exists a subsegmentΣK ofΣpassing through p such that theforward Poincar´e Map P K:ΣK→ΣK induced by X is an infinitesimal K–contraction.In fact,let L0=max{1,L n−1}and d∈N be such that L0κd<K.We shall proceed considering only the case in which p is nontrivialα−recurrent.We can take a subsegmentΣK ofΣpassing through p such thatΣK⊂dom(P−dn)andΣK,P−1(ΣK),···,P−dn(ΣK)are paiwise disjoint. Hence,if P K:ΣK→ΣK is the forward Poincar´e Map induced by X,then,for all q∈dom(P K), there exists m(q)>dn such that P K(q)=P m(q)(q).In this way,since the function m:q→m(q)(∂ΣK).This is locally constant,|DP K(q)|=|DP m(q)(q)|≤L0κd<K for all q∈dom(P K)\P−1Kproves(a).Let q∈N be a nontrivial recurrent point.Now we shall shift the property obtained in(a)to any segment Σtransversal to X passing through q.We shall only consider the case in which q is non–trivialα−recurrent and soγ−q is dense in N.Let K∈(0,1)and take p1∈(γ−q∩ΣK/2)\{p}.Select a subsegmentΣ1ofΣK/2passing through p1and a subsegment ΣK of Σpassing through q such that the forward Poincar´e Map T:Σ1→ ΣK is a diffeomorphism and,for all x∈Σ1,y∈ ΣK,|DT(x)DT−1(y)|<2.This implies that the forward Poincar´e Map P K: ΣK→ ΣK will be an infinitesimal K−contraction because|D P K(y)|=|D(T◦P1◦T−1)(y)|≤2|DP1(z)|<K,where P1:Σ1→Σ1is the forward Poincar´e Map induced by X and T(z)=y. Definition3.2(flow box).Let X∈X r H(M)and letΣ1,Σ2be disjoint,compact transversal seg-ments to X such that the forward Poincar´e Map T:Σ1→Σ2induced by X is a diffeomorphism.For each p∈Σ1,letτ(p)=min{t>0:X t(p)∈Σ2}.The compact region{X t(p):p∈Σ1,0≤t≤τ(p)} is called aflow box of X.Theorem 3.3(flow box theorem).Let U⊂M be an open set,X∈X r H(U),Σ⊂U be a compact transversal segment to X and p∈Σ\∂Σ.There existǫ>0 arbitrarily small such that B=B(Σ,ǫ)={X t(p):t∈[−ǫ,0],p∈Σ}is aflow box of X,and a C r−diffeomorphism h:B→[−ǫ,0]×[a,b]such that h(p)=(0,0),h(Σ)={0}×[a,b],h|Σis an isometry and h∗(X|B)=(1,0)|[−ǫ,0]×[a,b],where a<0<b,(1,0)is the unit horizontal vectorfield in R2and h∗(X|B)is the pushforward of the vectorfield X|B by h.The map h is denominated a C r−rectifying diffeomorphism for B.Proof.See Palis and de Melo[18,Tubular Flow Theorem,p.40]. Definition3.4.Given a compact transversal segmentΣto X∈X r H(M),p∈Σ\∂Σandǫ>0 small,we say that B(Σ,ǫ)={X t(p):t∈[−ǫ,0],p∈Σ}is aflow box of X ending atΣor at p. We say that B(Σ,ǫ)is arbitrarily thin ifǫcan be taken arbitrarily small and we say that B(Σ,ǫ) is arbitrarily small if B(Σ,ǫ)can be taken contained in any neighborhood of p.Next lemma will be used in the proofs of Theorem5.5and Theorem6.4.Lemma3.5.Suppose that X∈X r H(M)has the infinitesimal contraction property at a non–trivial recurrent point p∈M of X.There exist an arbitrarily smallflow box B0of X ending at p and an arbitrarily small neighborhood V0of X in X r H(M)such that every Z∈V0,with Z−X supported in B0,has the infinitesimal contraction property at B0.Proof.LetΣ1=(a1,b1)be a transversal segment to X passing through p such that the forward Poincar´e Map P1:Σ1→Σ1induced by X is an infinitesimalκ−contraction for someκ∈(0,1).Let [a,b]⊂(a1,b1)be a compact subsegment passing through p and let B0=B([a,b],ǫ)be aflow box. There exists a neighborhood V1of X in X r H(M)such that for every Z∈V1with Z−X supported in B0we have that B0is still aflow box of Z.In particular,for every Z∈V1such that Z−X supported in B0,dom(P Z)=dom(P1),where P Z denotes the forward Poincar´e Map induced by Z on(a1,b1).Givenδ>0satisfying0<κ+δ<1,by the continuity of the map Z→DP Z,there exists a neighborhod V0⊂V1of X such that for every Z∈V0with Z−X supported in B0we have that|DP Z(w)|<|DP1(w)|+δ<κ+δ<1for all w∈dom(P1).Hence P Z is an infinitesimal (κ+δ)–contraction.The rest of the proof follows as in the proof of Proposition3.1by recalling that the trajectory of every non–trivial recurrent point of Z in B0meets(a1,b1).4.Topological DynamicsLet X∈X r H(M).We say that N⊂M is an invariant set of X if X t(N)⊂N for all t∈R.We say that K⊂N is a minimal set of X if K is compact,non–empty and invariant,and there doesnot exist any proper subset of K with these properties.We shall need the following lemmas from topological dynamics.As every vectorfield of X r H(M)has singularities,the Denjoy–Schwartz Theorem (see[23]or[24,pp.39–40])implies thatLemma4.1.Let X∈X r H(M),r≥2.Then any minimal set of X is either a singularity or a periodic trajectory.The proof of the following lemma can be found in[17,Theorem2.6.1].Lemma4.2.Let X∈X r H(M)and let p∈M.Thenω(p)(resp.α(p))is exactly one of the following sets:a singularity,a periodic trajectory,an attracting graph,or a quasiminimal set.Lemma4.3.Let N be a quasiminimal set of X∈X r H(M).Then every trajectory of N is either a saddle–point or a saddle–connection or else a non–trivial recurrent trajectory dense in N(which may possibly be a saddle–separatrix.)Proof.See[17,Theorem2.4.2,pp.31–32].Lemma4.4.Let X∈X r H(M),r≥2,and let N be a quasiminimal set of X.Then there exist saddle–separatricesσ1,σ2⊂N such thatα(σ1)=N=ω(σ2).Proof.Firstly let us proof that X has singularities in N and that all of them are hyperbolic saddle–points.If this was not the case,then N would contain no singularities and,by Lemma4.3,N would be a minimal set of X contradicting Lemma4.1.We shall only prove that N contains dense unstable separatrices.Suppose by contradiction that(a)every unstable separatrixσ⊂N is a saddle–connection.Take a non-trivialω-recurrent semitrajectoryγ+in N(there is a continuum of such trajectories in N,see[1,Theorem2.1,p.57]).We say that a region R⊂M is aγ+-flow-box if there exists a homeomorphism h:[−1,1]×[0,1]→R such that(b1)for all y∈(0,1],h([−1,1]×{y})is an arc of trajectory of X starting at the point h((−1,y)) and ending at the point h((1,y)).Also,h((0,0))is a saddle–point and h([−1,0)×{0})(resp.h((0,1]×{0})is a stable(resp.an unstable)half–separatrix of h((0,0));(b2)h({−1}×[0,1])(resp.h({1}×[0,1]))is a transversal segment to X called the entering edge(resp.exiting edge)of R.Moreover,γ+∩h({−1}×[0,1])accumulates at the point h((−1,0)).As X has onlyfinitely many unstable separatrices,by using(a)we shall be able tofind a sequence R1,R2,...,R n ofγ+-flow-boxes,whose interiors are pairwise disjoint,such that,for all i∈{1,2,...,n−1},the exiting edge of R i is the equal to the entering edge of R i+1and the exiting edge of R n is contained in the entering edge of R1.In this way,the interior of∪n i=1R i is an open annulus eventually trapping the semitrajectoryγ+which so cannot be dense.This contradiction proves the lemma.Definition4.5.Let X∈X r H(M)and letσbe a non–trivial recurrent unstable separatrix of a saddle–point s.We say that a transversal segmentΣto X isσ-adapted ifσ(oriented as starting at s)intersectsΣinfinitely many times and thefirst two of such intersections are precisely the endpoints ofΣ.Lemma4.6.Letσbe a non–trivial recurrent unstable saddle–separatrix of X∈X r H(M).Then every transversal segmentΣ1=(a1,b1)to X intersectingσcontains a compact subsegment[a,b]⊂(a1,b1)which isσ−adapted.Proof.Orientσso that it starts at the saddle–pointα(σ).Let p1,p2,p3be thefirst three points at whichσintersects(a1,b1)and denoted in such a way that a1<p1<p2<p3<b1.Ifσaccumulates at p2from above(resp.from below)then[p2,p3](resp.[p1,p2])will beσ−adapted.Lemma4.7.Let X∈X r H(M),Σ=[a,b]be a transversal segment to X passing through a non–trivial recurrent point of X and P:[a,b]→[a,b]be the forward Poincar´e Map induced by X.Then dom(P)\{a,b}is properly contained in(a,b)and consists offinitely many open intervals such thatif s/∈{a,b}is an endpoint of one of these intervals then the positive semitrajectoryγ+s starting ats goes directly to a saddle–point without returning to[a,b].Proof.The proof of this lemma can be found in Palis and de Melo[18,pp.144–146]or in Peixoto [20].5.C r−Connecting ResultsDefinition5.1.Given X∈X r H(M)and aflow box B of X,we shall denote by A(B,X)the set of the vectorfields Y∈X r H(M)supported in B such that for allλ∈[0,1],B is still aflow box of X+λY.In next lemma we assume that the domain of the forward Poincar´e Map P is non–empty.In the applications of Lemma5.2and Theorem5.3,p will be a non–trivial recurrent point.Lemma5.2.Let X∈X r H(M)be smooth in a neighborhood V0of a point p∈M and letΣ=[a,b]⊂V0, with a<0<b,be a transversal segment to X passing through p=0.There exist an arbitrarily thin flow box B=B([a,b],ǫ)contained in V0,andY∈A(B,X)⊂X r H(M)arbitrarily C r−close to the zero–vector–field such that for eachλ∈[0,1] the forward Poincar´e Map Pλ:[a,b]→[a,b]induced by X+λY is of the form Pλ=Eλ◦P,whereP=P0,E0is the identity map,c=min{−a,b},δ∈(0,c/8),and Eλ:[a,b]→[a,b]is a C rdiffeomorphism satisfying the following conditions:Eλ(x)−x=λδ,x∈[−4δ,4δ],(1)Eλ(x)−x≤λδ,x∈[a,b].(2)Proof.By Theorem3.3,there existǫ>0arbitrarily small,aflow box B=B([a,b],ǫ)⊂V0,and a C r+1−rectifying diffeomorphism h:B→[−ǫ,0]×[a,b].Letφ1:[−ǫ,0]→[0,1]andφ2: [a,b]→[0,1]be smooth functions such that(φ1)−1(1)=[−8ǫ/10,−2ǫ/10],(φ1)−1(0)=[−ǫ,0]\ [−9ǫ/10,−ǫ/10],(φ2)−1(1)=[−6δ,6δ],(φ2)−1(0)=[a,b]\[−7δ,7δ].Let Y0:[−ǫ,0]×[a,b]→R2 be the smooth vectorfield which at each(x,y)∈[−ǫ,0]×[a,b]takes the value:Y0(x,y)=(1,0)+ηφ1(x)φ2(y)(0,δ),whereη>0is a positive constant such that the positive semitrajectoryγ+(−ǫ,−4δ)of Y0starting at(−ǫ,−4δ)intersects{0}×[a,b]at the point(0,−3δ).By construction,for each y∈[−4δ,4δ],the positive semitrajectoryγ+(−ǫ,y)of Y0starting at(−ǫ,y)is an upward shift ofγ+(−ǫ,−4δ)and sointersects{0}×[a,b]at(0,y+δ).Define Y∈X r H(M)to be a vectorfield supported in B such that Y|B=(h−1)∗(Y0).Accordingly,(X+λY)|B=(h−1)∗((1,0)+λY0).Recall that by Theorem3.3,the map h takes isometrically[a,b]onto{0}×[a,b].By construction, the one–parameter family of vectorfields X+λY has all the required properties.Theorem5.3.Let X∈X r H(M),σbe a non–trivial recurrent unstable saddle–separatrix,Σ=[a,b] be aσ-adapted transversal segment to X,B=B([a,b],ǫ)be aflow box of X and Y∈A(B,X).If q∈[a,b]is thefirst intersection ofσwith[a,b]then either of the following alternatives happens:(a)for someλ∈[0,1],[a,b]intersects a saddle–connection of X+λY or,(b)for every(λ,n)∈[0,1]×N,the point q belongs to dom(P nλ)and P nλ(q)depends continuously onλ.In this case,for eachλ∈[0,1],the sequence{P nλ(q)}n∈N accumulates in a point of[a,b] belonging,with respect to X+λY,to either a closed trajectory or to a non-trivial recurrent trajectory, where Pλ:[a,b]→[a,b]denotes the forward Poincar´e map induced by X+λY.Proof.Assume that(a)does not happen.Let us prove that then(b)occurs.Firstly we have to show that for every(λ,n)∈[0,1]×N,the point q belongs to dom(P nλ).Suppose that this does nothappen.So for some(λ1,n1)∈(0,1]×N−{0},we have that q∈dom(P n1−1λ)for allλ∈[0,1],and q∈dom(P n1λ1).Hence,we have that P n1−1λ1(q)does not belong to dom(Pλ1)=dom(P0)whereas P n1−10(q)∈dom(P0).By construction,P n1−1λ(q)depends continuously onλ,and so forsomeλ2∈[0,λ1],P n1−1λ2(q)intersects the boundary of dom(P0).By Lemma4.7,X+λ2Y has asaddle–connection intersecting[a,b],which contradicts the initial assumption.Therefore,thefirstpart of(b)is proved.The second part of(b)follows from Lemma4.2since the existence of an attracting graph intersecting[a,b]would imply(a).In the proof of next lemma we shall use the fact that a transversal segmentΣ=[a,b]toX∈X r H(M)may also be represented by[a+s,b+s],for any s∈R.Henceforth,if A is a subsetof M thenγp.LetΣ1=[a1,b1]⊂V0∩V be a transversal segment to X passing through p such that PΣ1is aninfinitesimalκ−contraction for some0<κ<0.1.By Lemma4.6,there exists aσ2–adapted sub-segmentΣ=[a,b]⊂[a1,b1].Let pis a non–trivial recurrent point.Modulo shifting the interval[a1,b1],we may assume that a<0<bandcase in which0is an accumulation point ofσ2∩[a,0).Let q∈σ2∩[a,b]be thefirst intersection ofσ2with[a,b].Suppose by contradiction that,for allλ∈[0,1],X+λY has no saddle–connections.Then by Theorem5.3,for all(λ,n)∈[0,1]×N,the point q belongs to dom(P nλ)and P nλ(q)depends continuously onλ.By(2)of Lemma5.2and by proceeding inductively,we may see that,for all integer n≥1,|P◦(Eλ◦P)n−1(q)−P n(q)|≤κδ(1+κ+···+κn−2)≤κδ1−κ≥−κδ−κδ6.C r−Closing ResultsAn interval exchange transformation or simply an iet is an injective map E:R/Z→R/Z of the unit circle,differentiable everywhere except possibly atfinitely many points and such that for all x∈dom(E)(its domain of definition),|DE(x)|=1.The trajectory of E passing through x∈R/Z is the set O(x)={E n(x):n∈Z and x∈dom(E n)}.We say that E is minimal if O(x) is dense in R/Z for every x∈R/Z.Given a transversal circle C to X∈X r H(M),we say that the forward Poincar´e Map P:C→C is topologically semiconjugate to an iet E:R/Z→R/Z if there is a monotone continuous map h:C→R/Z of degree one such that E◦h(x)=h◦P(x)for all x∈dom(P).We shall need the following structure theorem due to Gutierrez[5].We should remark that in this theorem below,the item(d)although not explicitly stated in[5]follows from the proof given therein and from the fact that X hasfinitely many singularities.Theorem6.1.Let X∈X r H(M).The topological closure of the non–trivial recurrent trajectories of X determinesfinitely many quasiminimal sets N1,N2...,N m.For each1≤i≤m,there existssuch that if a transversal circle C i to X intersecting every non–trivial recurrent trajectory of X|NiP i:C i→C i is the forward Poincar´e Map induced by X on C i then:(a)Either N i∩C i=C i or N i∩C i is a Cantor set;(b)N j∩C i=∅,for all j∈{1,2...,i−1,i+1,...,m};(c)P i is topologically semiconjugate to a minimal interval exchange transformationE i:R/Z→R/Z;(d)For each q∈C i,γq∩C i is an infinite set.We call the circle C i a special transverse circle for N i.Corollary6.2.Let X∈X r H(M)and let N be a quasiminimal set.Given a transversal segment Σ1passing through a non–trivial recurrent point p∈N,there exists a subsegmentΣofΣ1passing through p such that if z∈Σthen eitherα(z)=N orω(z)=N.In particular,either z∈∩∞n=1dom(P n)or z∈∩∞n=1dom(P−n),where P:Σ→Σis the forward Poincar´e Map induced by X.Proof.Let C be a special transversal circle for N.There exist a subsegmentΣofΣ1passing through p and a subsegmentΓof C such that the forward Poincar´e Map T:Σ→Γinduced by X is a diffeomorphism.Since C is free offinite trajectories(by(d)of Theorem6.1),so isΣ.Hence, by Lemma4.2,eitherα(z)orω(z)is a quasiminimal set,which by(b)of Theorem6.1,has to be N. Proposition6.3.Suppose that X∈X r H(M)has the infinitesimal contraction property at a non–trivial recurrent point p∈M.There exists an arbitrarily smallflow box B0ending at p and an arbitrarily small neighborhood V0of X in X r H(M)such that either:(i)some Z∈V0with Z−X supported in B0has a periodic trajectory meeting B0or,(ii)every Z∈V0with Z−X supported in B0has a non–trivial recurrent point in the interior of B0.Proof.By Corollary6.2,given a transversal segmentΣ1to X passing through p,there exists a subsegmentΣofΣ1passing through p such that for every z∈Σ,eitherα(z)=N orω(z)=N, where N=Theorem A.Suppose that X∈X r H(M),r≥2,has the contraction property at a quasiminimal set N.For each p∈N,there exists Y∈X r H(M)arbitrarily C r−close to X having a periodic trajectory passing through p.Proof.That localized C r−closing(Theorem6.4)implies C r−closing(Theorem A)is an elementary fact.7.Transverse MeasuresLet N be a quasiminimal set of X∈X r H(M),Σbe a transversal segment to X such thatΣ\∂Σintersects N and P:Σ→Σbe the forward Poincar´e Map induced by X.We may considerΣas a Borel measurable space(Σ,B),where B is the Borelσ−algebra onΣ.We say that a Borel probability measure is non–atomic if it assigns measure zero to every one–point–set.A transverse measure onΣis a non–atomic P−invariant Borel probability measure which is supported in N∩Σ.A transverse measureνis called ergodic if whenever P−1(B)=B for some Borel set B∈B then eitherν(B)=0orν(B)=1.We let M(Σ)denote the set of Borel probability measures onΣand we let M P(Σ)denote the subset of M(Σ)formed by the P−invariant Borel probability measures. We say that P is uniquely ergodic if M P(Σ)is a unitary set.A set W⊂Σis called a a total measure set ifν(W)=1for everyν∈M P(Σ).Concerning the existence of transverse measures, we have the following result.Theorem7.1.Let N be a quasiminimal set of X∈X r H(M)and letΣ1be a compact transversal segment to X passing through a non–trivial recurrent point p∈N.There exist a subsegment Σ⊂Σ1passing through p andfinitely many ergodic transverse measuresν1,...,νs∈M P(Σ)such that everyν∈M P(Σ)can be written in the formν= s i=1λiνi,whereλi≥0for all1≤i≤s, and s i=1λi=1.Proof.The proof may be split into two parts.Thefirst part of the proof–that every small subsegment ofΣ1passing through p can be endowed with a transverse measure–can be found in Katok[13]and Gutierrez[9].To prove the second part,let C be a special transversal circle to X passing throughγp as in the Theorem6.1.There exist subsegmentsΣ⊂Σ1containing p andΓ⊂C such that the forward Poincar´e Map T:Σ→Γinduced by X is a diffeomorphism. We claim that M P(Σ)is made up of transverse measures,where P:Σ→Σis the forward Poincar´e Map induced by X.Indeed,by(d)of Theorem6.1,Σis free of periodic points.By Poincar´e Recurrence Theorem,the set of non–trivial recurrent points inΣis a total measure set. By(b)of Theorem6.1,all these non–trivial recurrent points belong to the same quasiminimal set.This proves the claim.Now,every(ergodic)transverse measure onΣcorresponds,via the diffeomorphism T,to a(ergodic)transverse measure on C.By(c)of Theorem6.1,every(ergodic) transverse measure on C corresponds to a(ergodic)Borel probability measure on R/Z invariant by a minimal interval exchange transformation E:R/Z→R/Z.By a result of Keane[14],which also holds for interval exchange transformations withflips[3],there exist onlyfinitely many ergodic Borel probability measures invariant by E.Each of such E−invariant Borel probability measures on R/Z is associated to exactly one ergodic transverse measure in M P(Σ).Now the rest of the proof follows from the fact that M P(Σ)is the convex hull of its ergodic measures.Let P:Σ→Σbe the forward Poincar´e Map induced by X on a transversal segmentΣto X∈X r H(M).By Lemma4.7,the domain of P is the union offinitely many open,pairwise disjoint subintervals ofΣ:dom(P)=∪m i=1J i.We say that the lateral limits of|DP|exist if for every1≤i≤m and for every p∈∂J i,the lateral limitℓ=lim x→px∈J i |DP(x)|exists as a point of[0,+∞].Henceforth,till the end of this paper,we shall assume that N is a quasiminimal set,Σis a transversal segment to X such thatΣ\∂Σintersects N and P:Σ→Σis the forward Poincar´e Map induced by X onΣ.We shall assume thatΣis so small that the forward Poincar´e Map T:Σ→T(Σ)⊂C induced by X is a diffeomorphism,where C is a special transversal circle for N,and that P has the following properties:(P1)|DP|is bounded from above;(P2)The lateral limits of|DP|exist.Definition7.2(Almost–integrable function).We say that log|DP|isν–almost–integrable ifmin log+|DP|dν, log−|DP|dν <∞,wherelog+|DP(x)|=max{log|DP(x)|,0},log−|DP(x)|=max{−log|DP(x)|,0},andν∈M(Σ).In this case we definelog|DP|dν= log+|DP|dν− log−|DP|dν,which is a well defined value of the subinterval[−∞,∞)of the extended real line[−∞,∞]. Lemma7.3.Suppose that there exists K∈R such that log|DP|dν<K for allν∈M P(Σ). Then there exists a continuous functionφ:Σ→R everywhere defined,with log|DP(x)|<φ(x)for all x∈dom(P)\P−1(∂Σ),such that φdν<K for allν∈M P(Σ).Proof.By reasoning as in Theorem7.1,sinceΣis disjoint of periodic trajectories,we may show that M P(Σ)is the convex hull offinitely many ergodic(non–atomic)transverse measuresν1,...,νs.It follows from(P1)and(P2)that there exists a continuous function dom(P)→R such that φ(x)for all x∈dom(P)\P−1(∂Σ).Hence, φtoΣ. Since everyν∈M P(Σ)is supported in N∩Σ⊂φdν<K for allν∈M P(Σ). Lemma7.4.The following statements are equivalent:(a)lim inf n→∞1nlog|DP(x)|<−c for some c>0and for all x in a total measure set; Proof.Let us show that(a)implies(b).By(P1),log|DP|isν−almost integrable with respect to eachν∈M(Σ).Hence,there exists K∈R such that log|DP|dνi<K,for all1≤i≤s, where{νi}s i=1are the ergodic transverse measures in M P(Σ).So either log|DP|dνi=−∞for。
High-order small-time local controllability

This work was partially supported through NSF grants DMS-8500941 and DMS-8603156
1
way to such a solution are many difficult problems, which are of high mathematical interest in their own right. One of these problems is (small-time) local controllability (or reachability), which essentially asks for the set of points which may be reached from a given initial point by solutions of system (1). On a purely formal level any solution to this problem may be thought of as a nonlinear open mapping theorem (for mappings from a function space into a finite dimensional space), thus explaining the deepness and intricacy of this problem. Many different notions of controllability have been developped, for a survey see section 2.3 of [23]. Here we only will use accessibility and small-time local controllability (STLC) (about an equilibrium point). The attainable set AU (t) at time t > 0 is the set of all points which can be reached in time t by solutions of (1). We say (1) is accessible if AU (t) has n-dimensional interior for all t > 0, and we say (1) is small-time locally controllable if AU (t) contains the equilibrium (i.e. the reference solution) x ≡ 0 in its interior for all t > 0. (Here a regrettable confusion of terminology has occurred, as intuitively one would like to call this property small-time local reachability from zero, while small-time local controllability should refer to that the equilibrium can be reached from a neighbourhood in small time. However, in our setting these two notions are symmetric under time reversal, and we shall stick to the now established definition as given above.) We recall the Kalman-Rank-Condition which is both a necessary and sufficient condition for both local controllability and accessibility of the linear system (2): Theorem 1.1 If and only if rank{B, AB, . . . , An−1 B } = n then 0 ∈intAU (t) for all t > 0. In the nonlinear case, however, a system may be accessible without being locally controllable; for example consider the system Example 1.1 x ˙ 1 (t) = u(t) x ˙ 2 (t) = x2 1 x(0) = 0 |u(·)| ≤ 1. (3)
不变矩阵视觉模式识别英文文献翻译
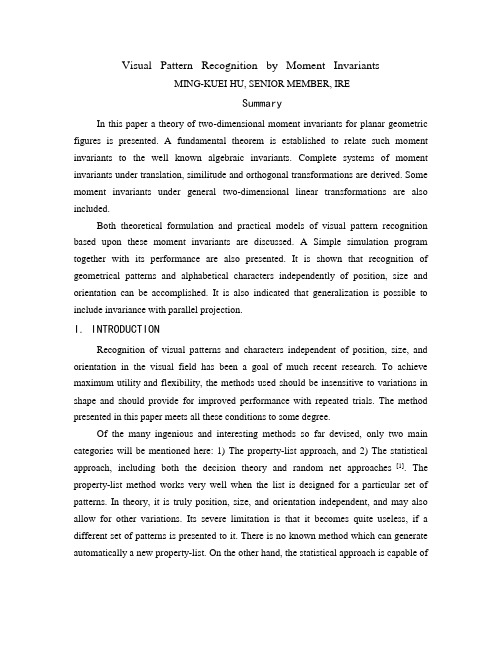
Visual Pattern Recognition by Moment InvariantsMING-KUEI HU, SENIOR MEMBER, IRESummaryIn this paper a theory of two-dimensional moment invariants for planar geometric figures is presented. A fundamental theorem is established to relate such moment invariants to the well known algebraic invariants. Complete systems of moment invariants under translation, similitude and orthogonal transformations are derived. Some moment invariants under general two-dimensional linear transformations are also included.Both theoretical formulation and practical models of visual pattern recognition based upon these moment invariants are discussed. A Simple simulation program together with its performance are also presented. It is shown that recognition of geometrical patterns and alphabetical characters independently of position, size and orientation can be accomplished. It is also indicated that generalization is possible to include invariance with parallel projection.I. INTRODUCTIONRecognition of visual patterns and characters independent of position, size, and orientation in the visual field has been a goal of much recent research. To achieve maximum utility and flexibility, the methods used should be insensitive to variations in shape and should provide for improved performance with repeated trials. The method presented in this paper meets all these conditions to some degree.Of the many ingenious and interesting methods so far devised, only two main categories will be mentioned here: 1) The property-list approach, and 2) The statistical approach, including both the decision theory and random net approaches[1]. The property-list method works very well when the list is designed for a particular set of patterns. In theory, it is truly position, size, and orientation independent, and may also allow for other variations. Its severe limitation is that it becomes quite useless, if a different set of patterns is presented to it. There is no known method which can generate automatically a new property-list. On the other hand, the statistical approach is capable ofhandling new sets of patterns with little difficulty, but it is limited in its ability to recognize patterns independently of position, size and orientation.This paper reports the mathematical foundation of two dimensional moment invariants and their applications to visual information processing [2]. The results show that recognition schemes based on these invariants could be truly position, size and orientation independent, and also flexible enough to learn almost any set of patterns.In classical mechanics and statistical theory, the concept of moments is used extensively; central moments, size normalization, and principal axes are also used. To the author’s knowledge, the two-dimensional moment invariants, absolute as well as relative, that are to be presented have not been studied. In the pattern recognition field, centroid and size normalization have been exploited[3]-[5]for “preprocessing.” Orientation normalization has also been attempted[5] .The method presented here achieves orientation independence without ambiguity by using either absolute or relative orthogonal moment invariants. The method further uses “moment invariants” (to be described in III) or invariant moments (moments referred to a pair of uniquely determined principal axes) to characterize each pattern for recognition.Section II gives definitions and properties of two dimensional moments and algebraic invariants. The moment invariants under translation, similitude, orthogonal transformations and also under the general linear transformations are developed in Section III. Two specific methods of using moment invariants for pattern recognition are described in IV. A simulation program of a simple model (programmed for an LGP-30), the performance of the program, and some possible generalizations are described in Section V.II. MOMENTSANDALGEBRAIC INVARIANTSA.A Uniqueness Theorem Concerning MomentsIn this paper, the two-dimensional (p + q)th order moments of a density distribution function ρ(x,y) are defined in terms of Riemann integrals asIf it is assumed that ρ(x,y) is a piecewise continuous therefore bounded function, and that it can have nonzero values only in the finite part of the xy plane; then moments of all orders exist and the following uniqueness theorem can be proved.Uniqueness Theorem: The double moment sequence {m pq} is uniquely determined by ρ(x,y); and conversely, ρ(x,y) is uniquely determined by {m pq} .It should be noted that the finiteness assumption is important; otherwise, the above uniqueness theorem might not hold.B. Characteristic Function and Moment Generating FunctionThe characteristic function and moment generating of ρ(x,y)may be defined, respectively, asIn both cases, u and v are assumed to be real. If moments of all orders exist, then both functions can be expanded into power series in terms of the moments m pq as follows:Both functions are widely used in statistical theory. If the characteristic function Φ(u,v) which is essentially the Fourier transform of ρ(x,y)is known, ρ(x,y)may be obtained from the following inverse Fourier transform,The moment generating function M(u,v) is not as useful in this respect, but it is convenient for the discussion in Section III. The close relationships and differences between Φ(u,v) and M(u,v) may be seen much more clearly, if we consider both as special cases of the two-sided Laplace transform of ρ(x,y),where s and t are now considered as complex variables.C. Central MomentsThe central moments u pq are defined as(8)WhereIt is well known that under the translation of coordinates,the central moments do not change; therefore, we have the following theorem.Theorem: The central moments are invariants under translation.From (8), it is quite easy to express the central moments in terms of the ordinary moments. For the first four orders we haveFrom here on, for the simplicity of description, all moments referred to are central moments, and u pq will be simply expressed asand the moment generating function M(u, v) will also be referred to central moments.D. Algebraic Forms and InvariantsThe following homogeneous polynomial of two variables u and v,is called a binary algebraic form, or simply a binary form, of order p. Using a notation, introduced by Cayley, the above form may be written asA homogeneous polynomial I(a) of the coefficients is an algebraic invariant of weight w, ifwhere a p0',…,a0p'are the new coefficients obtained from substituting the following general linear transformation into the original form (14).If w = 0, the invariant is called an absolute invariant; if w≠ 0 it is called a relative invariant. The invariant defined above may depend upon the coefficients of more than one form. Under special linear transformations to be discussed in Section III, △ may not be limited to the determinant of the transformation. By eliminating A between two relative invariants, a nonintegral absolute invariant can always be obtained.In the study of invariants, it is helpful to introduce another pair of variables x and y, whose transformation with respect to (16) is as follows:The transformation (17) is referred to as a cogredient transformation, and (16) is referred to as a contragredient transformation. The variable x, y are referred to as covariant variables, and u, v as contravariant variables. They satisfy the following invariant relationThe study of algebraic invariants was started by Boole, Cayley and Sylvester more than a century ago, and followed vigorously by others, but interest has gradually declined since the early part of this century. The moment invariants to be discussed in Section III will draw heavily on the results of algebraic invariants. To the authors knowledge, there was no systematic study of the moment invariants in the sense to be described.III. MOMENT INVARIANTSA. A Fundamental Theorem of Moment InvariantsThe moment generating function with the exponential factor expanded into series form isInterchanging the integration and summation processes, we haveBy applying the transformation (17) to (19), and denoting the coefficients of x’ and y’ in the transformed factor(ux+vy) by u’ and v’, respectively,or equivalently by applying both (16) and (17) simultaneously to (19)) we obtainwhere is the absolute value of the Jacobian of the transformation (17), and M l(u’, v’)is the moment generating function after the transformation.If the transformed central moments , u'pq are defined asthen we haveIn the theory of algebraic invariants, it is well known that the transformation law for the a coefficients in th algebraic form (14) is the same as that for the monomials, x v-r y r, in the following expression:From (19), (20), (21) and (23), it can be seen clearly that the same relationship also holds between the pth order moments and the monomials except for the additional factor 1/∣J∣. Therefore, the following fundamental theorem is established.Fundamental Theorem of Moment Invariants: If the algebraic form of order p has an algebraic invariant,t hen the moments of order p have the same invariant but with the additional factor 1/∣J∣,This theorem holds also between algebraic invariants containing coefficients from two or more forms of different orders and moment invariants containing moments of the corresponding orders.B. Similitude Moment InvariantsUnder the similitude transformation, i.e., the change of size,each coefficient of any algebraic form is an invariantwhere 01 is not the determinant. For moment invariants we haveBy eliminating OL between the zeroth order relation,and the remaining ones, we have the following absolute similitude moment invariants:C. Orthogonal Moment InvariantsUnder the following proper orthogonal transformation or rotation:we haveTherefore, the moment invariants are exactly the same as the algebraic invariant,s. If we treat the moments as the coefficients of an algebraic formunder the following contragredient transformation:then we can derive the moment invariants by the following algebraic method. If we subject both u, 0 and u’, v’ to the following transform ation:then the orthogonal transformation is converted into the following simple relations,By substituting (36) and (37) into (34), we have the following identities:where Ipo, . . . , I,, and Igo, * . . , I&, are the corresponding coefficients after the substitutions. From the identity in U and V, the coefficients of the various monomials U p-r V r on the two sides must be the same. Therefore,These are (p + 1) linearly independent moment invariants under proper orthogonal transformations, and △=e iθwhich is not the determinant of the transformation.From the identity of first two expressions in (38), it can be seen that Ir,p-r is the complex conjugate of Ip-r,r ,It may be noted that these (p+1). I’s are linearly independent linear functions of the u’s, and vice versa.For the following improper orthogonal transformation, i.e., rotation and reflection:Similarly, we haveAndWhere Ip0,…,I0p and Ipo',…,I0p' are the same as those given by (40).The orthogonal invariants were first studied by Boole, and the above method was due to Sylvester[6].D. A Complete System of Absolute Orthogonal Moment InvariantsFrom (39) and (43), we may derive the following system of moment invariants by eliminating the factor e iθ:For the second-order moments, the two independent invariants areFor the third-order moments, the three independent invariants areA fourth one depending also on the third-order moments only isThere exists an algebraic relation between the above four invariants given in (45) and (46). The first three given by (45) are absolute invariants for both proper and improper rotations but the last one given by (46) is invariant only under proper rotation, and changes sign under improper rotation. This will be called a skew invariant. Therefore it is useful for distinguishing “mirror images.”One more independent absolute invariant may be formed from second and third order moments as follows:For pth order moments, p>= 4 we have [p/2], the integral part of p/2, invariantsIf p is even, we also haveAnd also combined with (p - 2)th order moments, we have [p/2 - 1] invariantscombined with second-order moments, if p = odd we haveif p = even[7],Therefore we always have (p + 1) independent absolute invariants. By changing the above sums into differences, we can also have the skew invariants. All the independent moment invariants together form a complete system, i.e., for any given invariant; it is always possible to express it in terms of the above invariants. The proof is omitted here.E. Moment Invariants Under General Linear TransformationsFrom the theory of algebraic invariants under the general linear transformations (17), it is known that the factor A is the determinant of the transformation. For linear transformations, J is also the determinant. For simplicity, let A, B, C and a, 6, c, d denote the second and third order moments, then we may write the following two binary forms in terms of these moment’s asFrom the theory of algebraic invariants, we have the following four algebraically independent invariants,of weight w = 2, 6, 4 and 6, respectively. For the zeroth order moment, we haveWith the understanding that △2= ∣J∣2, the following four absolute moment invariants are obtained,There also exists a skew invariant,[8] I5, of weight 9 depending on the moments A, B, C and a, b, c, d. This also may be normalized aswhere △/∣J∣ indicates the sign of the determinant. This invariant contains thirty monomial terms, and it is not algebraically independent. By counting the number of relations among the moments and the number of parameters involved, it can be shown that four is the largest number of independent invariants possible for this case. Various methods have been developed in finding algebraic invariants, and many invariants have been worked out in detail. In case extension to higher moment invariants are required, the known results for algebraic invariants will be of great help.IV. VISUAL INFORMATION PROCESSING AND RECOGNITIONA.Pattern Characterization and RecognitionAny geometrical pattern or alphabetical character can always be represented by a density distribution function ρ(x,y), with respect to a pair of axes fixed in the visual field. Clearly, the pattern can also be represented by its two-dimensional moments, m pq, with respect to the pair of fixed axes. Such moments of any order can be obtained by a number of methods. Using the relations between central moments and ordinary moments, the central moments can also be obtained. Furthermore, if these central moments are normalized in size by using the similitude moment invariants, then the set of moment invariants can still be used to characterize the particular pattern. Obviously, these are independent of the pattern position in the visual field and also independent of the pattern size.Two different ways will be described in the next two sections to accomplish orientation independence. In these cases, theoretically, there exist either infinitely manyabsolute moment invariants or infinitely many normalized moments with respect to the principal axes. For the purpose of machine recognition, it is obvious that only a finite number of them can be used. In fact, it is believed only a few of these invariants are necessary for many applications. To illustrate this point, a simple simulation program, using only two absolute moment invariants, and its performance will be described in Section V.B. The Method of Principal AxesIn (39) and (40), let p = 2, we have the following moment invariants,If the angle 0 is determined from the first equation IN (58) to make u11'=0, then we haveThe x’, y’ axes determined by any particular values of 0 satisfying (59) are called the principal axes of the pattern. With added restrictions, such as u20'>u02' and u30'>0,θcan be determined uniquely. Moments determined for such a pair of principal axes are independent of orientation.If this is used in addition to the method described in the last section, pattern identification can be made independently of position, size and orientation.The discrimination property of the patterns is increased if higher moments are also used. The higher moments with respect to the principal axes can be determined with ease,if the invariants given by (39) and (40) are used. These relations are also useful in other ways. As an illustration, for p = 3 we haveThe two remaining relations, which are the complex conjugate of these two, are omitted here. If θ and the four third moments are known, the same moments with respect to the principal axes can be computed easily by using the above relations. There is no need of transforming the input pattern here.In the above method, because of the complete orientation independence property, it is obvious that the numerals “6” and “9” can not be distinguished. If the method is modified slightly as follows, it can differentiate “6” from“9” while retaining the orientation independence property to a limited extent. The value of θ is still determined by(59), but it is also required to satisfy the condition∣θ∣< 45 degrees. The use of third order moments in this case is also essential.If the given pattern is of circular symmetry or of n-fold rotational symmetry, then the determination of θby (59) breaks down. This is due to the fact that both the numerator and the denominator are zero for such patterns. As an example, assume that the pattern is of 3-fold rotational symmetry, i.e., if the pattern is turned 2π/3 radians about its centroid, it is identically the same as the original. In the first equation in (58), there are only two possible values for θ to make the imaginary part of I20',i.e., to make u11'=0. Under this symmetry requirement, there are more than two possible values to make the imaginary part of I20' =0; therefore, the only possibility is to have I20'=0, and also I20=0. In this 3-fold rotational symmetry case, the first equation in (60) can be used to determine the 0 and the principal axes by requiring 3u21'-u03'=0. Based upon this example, we may state the following theorem.Theorem: If a pattern is of n-fold rotational symmetry, than all the orthogonal invariants, I’s, with the factor e-+iwθand w/n≠ integer must be identically equal to zero. For the limiting case of circular summetry, only I11,I22,… are not zero.For patterns with mirror symmetry, a similar theorem may be derived.C. The Method of Absolute Moment InvariantsThe absolute orthogonal moment invariant described in Section III-D can be used directly for orientation independent pattern identification. If these invariants are combined with the similitude invariants of central moments, then pattern identification can be made independently of position, size and orientation. A specific example is given in Section V-A.For the second and third order moments, we have the following six absolute orthogonal invariants:and one skew orthogonal invariants,This skew invariant is useful in distinguishing mirror images.This method can be generalized to accomplish pattern identification not only independently of position, size and orientation but also independently of parallel projection. In this generalization the general moment invariants are used instead of the orthogonal and similitude moment invariants.V. VISUAL PATTERN RECOGNITION MODELSA. The Simulation of a Simple ModelA simulation program of a simple pattern recognition model, using only two moment invariants, has been written for an LGP-30 computer. No information, properties, or features about the patterns to be recognized are contained in the simulation program itself; it learns. The visual field is a 16 X 16 matrix of small squares. A pattern is first projected onto the matrix and then each small square is digitalized to the values, 0, 2, 4, 6, or 8. After loading each pattern, the following two moment invariants[9].are computed. The central moments, u20,u11,u02used above (normalized with respect to size) are obtained from the ordinary moments by (11). This point (X, Y) in a two dimensional space is used as a representation of the pattern.Assume the program or model has already learned a number of patterns, represented by(Xi,Yi),i=1,2,…,n, together with their names. If a new pattern is presented to the model, a new point (X, Y) and the distancesbetween (X, Y) and (Xi, Yi) are computed. Let the minimum distance, d min, be defined asThe distance d, satisfying d k=d min, is selected (if more than one of the distances satisfying the condition, one d k is selected at random). Then d k is compared with a preselected recognition level L. 1) If d k> L, the computer will type out “I do not know”,then wait to learn the name of the new pattern. If a name is now entered, the computer then stores (X, Y) as (Xn+1,Yn+1)together with the assigned name. Hence, a new pattern is learned by the program. 2) If dk<=L, the computer will identify the pattern with (Xk,Yk) by typing out the name associated.A very simple performance-improving program is also incorporated. When this program is used, it replaces the values of Xi, Yi corresponding to the name now told, byThis operation moves the point (Xi, Yi) toward (X, Y).B. Performance of the Simulation ProgramSeveral experiments have been tried on the simulation program. For the convenience of description, two patterns are described as strictly similar, if one pattern can be transformed exactly into the other by a combination of translation, rotation and similitude transformations. In one experiment, patterns which are strictly similar after digitalization were fed to the program. If any one of such patterns is taught to the program just once, then it can identify correctly any other pattern of the same class. The number of different pattern classes capable of beinglearned is quite large, even with this simple program. There is no wrong identification except for specially constructed patterns.Another experiment dealt with character recognition. A set of twenty-six capital letters from a ‘J-inch Duro Lettering Stencils were copied onto the 16 X 16 matrix and digitalized as inputs to the program. The values of X and Y, in arbitrary units, are given in Table I and Fig. 1, and two samples of the digitalized inputs for the letter M and W are shown in Fig. 2. The following may be noted:1) Fig. 1 shows that the points for all the twenty-six letters are separated.2) If inputs, prepared by using the same stencils but not strictly similar after digitalization are used, the corresponding points are not the same as those shown in Fig. 1. For a limited number of cases tried, the maximumTABLE IFig. l-Point representation of the twenty-six capital lettersFig.2 T WO samples of the digitalized inputs for the letters M and W variation in terms of distance between two points representing the same letter is of the order of 0.5. Compared with Fig. 1, it is obvious that overlapping of some classes will occur. If the resolution of the visual field is increased, the performance will definitely be improved.3) In Fig. 1, it can be seen that some letters which are close to each other are of considerable difference in shape. A typical case is shown in Fig. 2, it is not difficult to conclude that the third order moments for the M and W examples shown will be considerably different.From these results, it is clear that both the resolution and the number of invariants used should be increased but probably not greatly.One additional experiment concerned the simple learning program. In this experiment, patterns belonging to the same class were generally represented by different points, clustered together, in the plane. As already described, a class represented by such a cluster was represented by a single point in this program, but this point together with the recognition level really form a circular recognition region for the class. For good performance, this region should be centered over the cluster of points representing the class. The point for the first sample of a class is not necessarily at the center of this region. Because of this fact, incorrect identifications may occur. The simple learning program, sometimes, is useful for such cases. If the clusters of points of different classes do not ‘overlap,’ generally, the program will improve the performance; otherwise, the performance may become worse. Another learning program will be described in the next section.C. Other Visual Pattern Recognition ModelsFrom the simulation program and the theoretical considerations described in IV, a considerably improved pattern recognition model is as follows: P absolute moment invariants or P normalized moments with respect to the principal axes, denoted by X1,X2,…,X p are used; and the point (X) = (X1,X2,…,Xp) in a P dimensional space is used as the representation for a pattern. It is believed that P = 6, (i.e., using four more invariants related to the third order moments) and a 32 ×32 or 50 ×50 matrix as the visual field will be adequate for many purposes.Let (Xi), i = 1, 2, … , n be the points representing the patterns already learned, and Ni be the number of samples of the ith pattern already learned. After each learning process for the ith pattern, Ni is replaced by (Ni + 11, and (Xi) bywhere (X) is the representation of the new sample. This new (Xi) is obviously equal to the average of all the (Ni + 1) samples learned. Instead of using a common recognition level, L, a separate one is determined for each pattern class in the learning process. After each sample is learned, Li is replaced by the larger one ofThe Li thus determined, as the sample number increases, approaches the minimum radius of a hypersphere which includes most if not all the sample points in its interior.The center of the hypersphere is located at (Xi).In this model, the following are stored for each class of patterns learned,(Xi) and Li; form a spherical recognition region for the ith pattern. When a new pattern represented by (X) is entered, the distancesare computed. The distances di satisfyingare then selected. If no di is obtained, considered as not yet learned, otherwiseis computed andis selected, as in Section V-A, to identify the pattern. The use of N, in the identification is believed to be useful when overlapping occurs.If automatic input and digitalization equipment is used, there may be other types of noise introduced in addition to that due to digitalization. The well known local averaging process[10],[11]can be used to reduce some of such noise, but the potential for discrimination possessed by such models is useful to combat whatever remains. In this connection, it seems worthwhile to point out the following two facts. 1) If two classes are separated, say, in two dimensions; they can never overlap when additional dimensions are introduced. 2) The use of moment invariants makes possible the derivation of modelswhich may automatically generate additional dimensions moment invariants-for the purpose of discrimination or combating noise.The representation of a pattern by a point in a P dimensional space converts the problem of pattern recognition into a problem of statistical decision theory. Depending upon the particular decision method used, different statistical models may be devised. The work done by Sebestyen” is an example, his method can be used here direct ly.The method of principal axes developed here has another application in connection with the statistical approaches mentioned at the beginning of this paper. It may be used as a preprocessor to normalize the inputs before the main processer is used. All the parameters necessary for translation, size and orientation normalizations can be obtained from some of the relations used in the method of principal axes. Such a preprocessor undoubtedly will increase the ability of the models based upon the statistical approach.ACKNOWLEDGMENTThe author would like to express his deep appreciation to Dr. W. R. LePage for his constructive criticism and invaluable help during the preparation of this paper.REFERENCE[1] M. Minsky, “Steps toward artificial intelligence,”PROC. IRE, vol. 49, pp. 830;January, 1961. Many references to these methods can be found in the Bibliography of M. Minsky’s article.[2] M-K. Hu, Pattern recognition by moment invariants, PROC.IRE (Correspondence),vol. 49, p. 1428; September, 1961.[3 ]W. Pitts and W. S. McCulloch, “How to know universals, ” Bull. Math. Biophys., vol.9, pp. 127-147; September, 1947.[4] L. G. Roberts, “Pattern recognition with an adaptive network, ”1960 IREINTERNATIONAL CONVENTION RECORD, pt. 2, pp. 66-70.[5] Minsky, op. cit., pp. 11-12.[6 ]E. B. Elliott, “Algebra of Quantics,” Oxford Univ. Press, New York, N. Y., 2nd ed.,ch. 15; 1913.[7] For p = 4, (52) is the same as the one given by (50); instead of (52), (I40I022+ I04I202)may be used.[8]Salmon, “Modern Higher Algebra,” Stechert, New York, N. Y. ,4th ed., p. 188; 1885.。
non-scaled floating point model -回复
non-scaled floating point model -回复什么是[nonscaled floating point model]随着计算机技术的不断发展,越来越多的数值计算需求涌现出来。
在这个过程中,浮点数成为了处理科学和工程计算中复杂数据的必要工具。
然而,浮点数也存在着一定的限制和问题。
在这篇文章中,我们将探讨一种被称为[nonscaled floating point model]的新型浮点数模型。
首先,我们需要了解什么是浮点数。
浮点数是一种用科学计数法表示的数值,采用了尾数和指数的形式。
例如,我们可以用浮点数表示1.23 x 10^3,这里的1.23为尾数,而3为指数。
浮点数的好处在于它可以表示各种数量级和范围的数值,并且可以进行相对精确的计算。
然而,传统的浮点数模型存在着一些问题,其中最主要的问题是精度丢失。
由于浮点数采用了有限位数的表示方式,它们无法精确地表示无理数、无法被整除的数以及其他一些特殊的数值。
这种精度丢失在科学和工程计算中经常会导致错误结果,甚至引发灾难性的后果。
为了解决这个问题,一种新型的浮点数模型被提出,即[nonscaled floating point model]。
这个模型的核心思想是放弃传统浮点数模型中的尾数和指数形式,转而采用非缩放形式的表示。
在[nonscaled floating point model]中,一个数值被表示为两个部分:单个浮点数和一个称为位置参数的附加信息。
浮点数的表示方式类似于传统的浮点数,但没有指数。
而位置参数存储着浮点数相对于一个基准值的精确位置。
这种非缩放形式的表示方式有很多优点。
首先,它可以更有效地利用计算机内存空间。
由于不需要额外的指数位,所以可以存储更多的有效数字。
这在高精度计算中尤为重要,因为它可以增加计算的准确性。
其次,非缩放形式的浮点数模型可以减少精度丢失的问题。
由于位置参数存储着浮点数的精确位置,所以可以在运算过程中保持较高的精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a r X i v :h e p -l a t /0010052v 1 27 O c t 20001Nontrivial fixed point in nonabelian modelsAdrian Patrascioiu a and Erhard Seiler b∗aPhysics Department,University of Arizona,Tucson,AZ 85721,U.S.A.bMax-Planck-Institut f¨u r Physik,Werner-Heisenberg-Institut,F¨o hringer Ring 6,80805Munich,GermanyWe investigate the percolation properties of equatorial strips in the two-dimensional O(3)nonlinear σmodel.We find convincing evidence that such strips do not percolate at low temperatures,provided they are sufficiently narrow.Rigorous arguments show that this implies the vanishing of the mass gap at low temperature and the absence of asymptotic freedom in the massive continuum limit.We also give an intuitive explanation of the transition to a massless phase and,based on it,an estimate of the transition temperature.1.IntroductionThis talk,though scheduled in the session on Perturbation Theory (PT),does not deal with PT as such.But one of its conclusions is that in cer-tain nonabelian models the perturbative Callan-Symanzik β-function gives the wrong picture of the renormalization group flow.In 1991we developed a rigorous criterion for the existence of a massless phase in 2D spin mod-els based on percolation properties of certain sub-sets of the target spin manifold [1].This was presented at the 1992lattice conference together with nonrigorous arguments that led to the con-clusion that all 2D O (N )most likely had a soft low temperature phase,contrary to prevailing ex-pectations.Advances in computer technology have made it feasible to tackle directly the question whether the percolation properties leading to the existence of a massless phase hold or not.In this talk I re-port our results giving direct numerical evidence for our old conjecture of the existence of a mass-less phase in models for which PT predicts mass generation and asymptotic freedom (AF);these results were first presented in [2]).For concretenss and simplicity we are dealing with the 2D O (3)model,a.k.a.classical Heisen-Zexp(−βH ).For the purpose of this in-vestigation we modify this model by introducing a constraint limiting the size of the deviation al-lowed between neighboring spins:s (x )·s (y )≥c (2)with −1≤c ≤1(the so-called cut action with cut c ),and we also replace the square by a tri-angular lattice;the Gibbs measure thus contains θ-functions enforcing the constraint (2).These modifications are made for purely technical rea-sons and we have checked that they do not change the universality class [3].2.The percolation criterionWe briefly sketch the percolation criterion de-veloped in 1991[1]:We divide the sphere S 2into three pieces:2•‘equatorial strip’Sǫ,defined by|s·n|<ǫ/2for somefixed unit vector n.•‘upper polar cap’P+ǫ,defined by s·n≥ǫ/2,•‘lower polar cap’P−ǫ,defined by s·n≤−ǫ/2.and denote the corresponding subsets of the lat-tice for a given configuration by S±ǫetc..These subsets fall into connected components called ‘clusters’;their mean size we denote by Sǫ etc. If this mean size isfinite,we say that the clusters ‘form islands’;if there is an infinite cluster,we say the subset percolates.There is a third possi-bility:that the clusters have divergent mean size, but none of them is infinite;this we call‘forma-tion of rings’.The main result of[1]is the following Theorem:If for a certain c>1−ǫ2/2Sǫdoes not percolate,the model has no mass gap.The reason why this is so can be understood by using the Fortuin-Kasteleyn(FK)representation [4]for the imbedded Ising spinsσx≡sgn(s(x)) (which is also the basis of the cluster algorithm). Butfirst one has to notice that in2D it is not possible that two disjoint clusters both percolate, and therefore,if c>1−ǫ2/2,the union of the polar caps cannot percolate,because then both of them would percolate.But if also Sǫdoes not percolate,as assumed,a lemma of Russo[5]as-sures us that the clusters of each of the three sets have divergent mean size.But due to the inequality c>1−ǫ2/2,each of the clusters of P+ǫor P−ǫhas to be contained in its entirety inside a FK cluster,and hance also the FK clusters have divergent mean size. Since the mean size of the FK clusters is equal to the susceptibility of the imbedded Ising spins, this divergent mean size is incompatible with ex-ponential clustering,and thus there is no mass gap.3.Percolation properties:numerical study We investigated numerically the percolation properties of the equatorial strip for the special caseβ=0.In this case the parameter c replaces the temperature in determining how ordered or disordered the system is.The results of our investigation[2]are sum-marized in the‘percolation phase diagram’Fig.1. The diagram is semiquantitative,but qualita-tively correct,as we will explain.Figure1.Phase diagram of the O(3)model on the T latticeIn thisfigure the solid line is the curve c= 1−ǫ2/2;above that line the two polar caps can-not‘touch’and therefore their union cannot per-colate.The dashed line separates a regime in which the strip Sǫpercolates(above)and one in which it does not(below).For small c,the strip forms islands forǫbelow that line.Around c=0.4a dotted line branches off;below it the strip still forms islands,whereas between the dot-ted and the dashed lines the clusters of the strip have mean infinite size without percolating(‘for-mation of rings’).The interesting region is the one between the solid and the dashed lines:here the strip does not percolate but the inequality of the theorem holds.So in this regime our theorem can be applied and allows us to conclude that for c>c o,c o≈0.7there is no mass gap.Fig.1also shows that forǫ<ǫo,withǫo≈0.76 the equatorial strip does not percolate for any c. [All`e s et al[6]published a study showing that for ǫ=1.05andβ=2.0(standard action)the equa-torial strip percolates.This is correct,but since their choice of parameters is such that they are3 Figure2.Ratio Pǫ / Sǫ for variousǫvaluesversus cboth in the massive phase and in the percolationregion of the strip,it is not very relevant for ourproblem].Let me now explain fromwhich facts our‘phasediagram’was derived:In Fig.2we show that ra-tios r≡ Pǫ / Sǫ as a function of c for severalvalues ofǫbetween.78and.91and for latticesizes L from160to1280.Figure3.Ratio P0.5 / S0.75It is seen that for small c(depending onǫ)rincreases sharply with L(we have data which areoffthe scale of thisfigure and show that the in-crease continues).This expresses the fact that inthis regime Sǫpercolates,wheras its complementPǫforms islands offinite size.At a certain valueof c the curves for different L intersect and r be-comes scale invariant;this is the critical point ofpercolation for the chosen value ofǫin which bothsets form rings.The pair(c,ǫ)defines a point onthe dashed curve in Fig.1.If we increase c beyond the intersection point,the size dependence of r is reversed,indicatingthat we are now in the regime of percolation ofPǫ.Figure4.ln P0.95 vs ln L for c=0and c=−1Increasing c still further,the curves come to-gether again and remain together,indicating thatfor all c in that regime(depending onǫ)we arein the regime of rings formation of both sets,i.e.we have entwred the regime between the dashedand dotted curves in Fig.1.For c→1the ratior converges to the geometric ratio(2−ǫ)/ǫof thesets Pǫand Sǫ.To corroborate that forǫless than about0.76Sǫdoes not percolate,no matter what c is,wealso measured the ratio r′≡ P+ǫ′ / Sǫ ,whereǫ′is chosen in such a way that the two sets haveequal area,i.e.ǫ′=2−2ǫ=0.5.Fig.3shows thatfor c<0.4r′increases sharply with L.Since the4polar cap cannot percolate,this means that P′ǫforms rings of arbitrary size,whereas Sǫforms islands offinite size.The behavior changes dras-tically around c=0.4,the L dependence of the ratio r′becomes a much milder increase,compat-ible with a power law behavior of both numerator and denominator,but clearly ruling out percola-tion of Sǫ.The only possible interpretation is that both sets form rings of arbitrary size.The crucial fact for our conclusion is obviously that a polar cap can form rings of arbitrary size even though it is smaller than a hemisphere.This ring formation then prevents percolation of the corresponding equatorial strip,and thus allows the application of our theorem.Our approach has been by necessity in the spirit offinite size scaling,studying how various quantities change with increasing size.So is it conceivable that we are deceived byfinite size be-havior that changes its character at some astro-nomical lattice size?Obviously in the truly in-teresting region near the critical point(which is around or slightly below c=0.7)we cannot work on lattices of thermodynamic size.But we did an additional test at c=0,where the correlation length is about53and we can easily go to ther-modynamic lattices:We measured directly the mean cluster size P0.95as a function of L for L up to1280.The results displayed in Fig.4show a linear dependence of ln P0.95 on ln(L),indi-cating a powerlike increase of P0.95 for lattices much larger than the correlation length.This is in sharp contrast with the behavior at c=−1, also shown in Fig.4,where one can clearly see P0.95 leveling off.If we combine this with another fact,which is plausible and which we also checked,namely that Pǫ is a monotonically increasing function of c, we reach the conclusion that this ring formation must persist for all c<1.4.Concluding remarksOur main conclusion is that the2D O(3)has a transition to a massless phase at low temper-ature,contrary to standard lore,which derives from the PT calculation of the Callan-Symanzik β-function.We have questioned the validity of PT in the models showing perturbative asymp-totic freedom in various publications and talks at lattice conferences(see for instance[7]),but our percolation study makes the conclusion unavoid-able that PT does not give the correct asymptotic expansion for theβ-function.A question that has been asked is what is ‘driving the transition’to the massless phase. This ia also answered in our recent paper[2]: it can be understood as the transition froma gas of instantons to a gas(or liquid)of super-instantons,which are the dominant excitations at low temperature and create the disorder required by the Mermin-Wagner theorem.In[2]we used a simple-minded energy-entropy argument to give a rough estimate of the transition temperature for the standard action model;the result(βcrt≈π), is consistent with knwon numerical results. REFERENCES1. A.Patrascioiu and E.Seiler,J.Stat.Phys.69(1992)573;Nucl.Phys.(Proc.Suppl.),B30 (1993)184.2. A.Patrascioiu and E.Seiler,Absence ofAsymptotic Freedom in Non-Abelian Models, hep-th/0002153.3. A.Patrascioiu and E.Seiler,paper in prepara-tion.4.P.W.Kasteleyn and C.M.Fortuin,J.Phys.Soc.Jpn.26(Suppl.)(1969)11;C.M.For-tuin and P.W.Kasteleyn,Physica57(1972) 536.5.L.Russo,Z.Wahrsch.verw.Gebiete,43(1978)39.6. B.All`e s,J.J.Alonso,C.Criado and M.Pepe,Phys.Rev.Lett.83(1999)3669.7. A.Patrascioiu and E.Seiler,Phys.Rev.Lett.74(1995)1920;Nucl.Phys.(Proc.Suppl.)B 42(1995)826.。