基于PLC的物料搬运机械手控制系统设计
基于PLC的搬运机械手控制系统设计
基于PLC的搬运机械手控制系统设计搬运机械手是一种自动化设备,广泛应用于工业生产中的物料搬运、装卸、组装等工序。
为了实现搬运机械手的自动化控制,可以采用基于可编程逻辑控制器(PLC)的控制系统。
本文将介绍一个基于PLC的搬运机械手控制系统的设计。
搬运机械手控制系统的主要功能是对机械手的运动进行控制。
基于PLC的控制系统可以实现对机械手的运动、速度和位置等参数进行精确控制,从而提升机械手的工作效率和准确性。
首先,需要确定搬运机械手的运动方式和结构。
常见的机械手运动方式包括直线运动、旋转运动和联动运动等。
根据任务需求,可以选择合适的运动方式和结构。
然后,需要选择合适的PLC设备。
PLC是一种专门用于工业自动化控制的设备,具有高可靠性、灵活性和可扩展性等特点。
根据机械手的规模和工作要求,选择适当的PLC设备。
接下来,需要设计搬运机械手的控制电路。
控制电路是实现机械手运动控制的关键部分,包括传感器、电磁阀、继电器等元件的连接和控制逻辑的设计。
在设计控制逻辑时,可以使用PLC提供的编程软件进行编程。
根据机械手的工作要求和操作流程,编写PLC程序,实现对机械手的自动控制。
此外,还需要设计人机界面(HMI)用于操作和监控机械手的运行状态。
HMI通常使用触摸屏或按钮等输入设备,以及显示屏或指示灯等输出设备。
通过HMI,操作人员可以控制机械手的运动和监控运行状态。
最后,进行系统调试和测试。
在将系统投入使用之前,需要进行调试和测试,确保搬运机械手的运动控制正常,并满足工作要求。
总结起来,基于PLC的搬运机械手控制系统设计包括确定运动方式和结构、选择合适的PLC设备、设计控制电路、编写PLC程序、设计人机界面以及进行系统调试和测试等步骤。
通过PLC控制系统的应用,可以提高机械手的自动化程度,提升生产效率和产品质量。
小型搬运机械手的PLC控制系统设计

小型搬运机械手的PLC控制系统设计
小型搬运机械手的PLC控制系统设计包括以下几个方面:
1. 确定系统需求:首先需要明确机械手的工作任务和工作环境,包
括搬运物品的重量、尺寸和形状,以及工作空间的限制。
2. 选择适当的PLC:根据系统需求选择合适的PLC,考虑其输入输
出点数、通信接口、处理能力和可靠性等因素。
3. 确定传感器和执行器:根据机械手的工作任务选择合适的传感器
和执行器,例如光电传感器、接近开关、压力传感器、伺服电机等。
4. 确定控制策略:根据机械手的工作任务确定控制策略,包括运动
控制、路径规划、物体识别等。
5. 编写PLC程序:根据控制策略编写PLC程序,使用相应的编程语
言(如 ladder diagram、structured text 等),实现机械手的自
动化控制。
6. 连接传感器和执行器:根据PLC的输入输出点数,将传感器和执
行器与PLC连接起来,确保数据的准确传输和控制信号的可靠输出。
7. 调试和测试:完成PLC程序编写后,进行调试和测试,验证系统
的功能和性能是否满足需求,对程序进行优化和修正。
8. 系统集成和实施:将PLC控制系统与机械手进行集成,确保系统
的稳定运行和安全性。
9. 运维和维护:定期对PLC控制系统进行维护和保养,包括检查传
感器和执行器的工作状态,更新PLC程序,修复故障等。
需要注意的是,小型搬运机械手的PLC控制系统设计需要根据具体
的应用场景和要求进行定制,以上仅为一般性的设计步骤和考虑因素,具体设计还需根据实际情况进行调整和优化。
基于PLC的搬运机械手控制系统设计

基于PLC的搬运机械手控制系统设计搬运机械手是工业生产中常用的一种机器人,目的是为了将物品从一个地方搬到另一个地方,以实现生产线的自动化生产。
为了方便操作和控制机械手的运动,我们常使用PLC进行控制。
本文将详细介绍基于PLC的搬运机械手控制系统设计并分为以下几个部分:系统设计、硬件设计、软件设计和测试与优化。
系统设计在设计搬运机械手的控制系统前,需要明确其基本能力以及操作条件。
本文需要实现的是一个能够在工业生产上自动完成货物的移动,如从一个点到达另一个点,或从一个点将货物取下并放入另一个点的机械手控制系统。
硬件设计在硬件方面,机械手的结构以及体积会影响到设计的复杂度和控制的难度。
机械手的操作部分包括控制电路、执行器驱动电路、电源等。
现在,我们来介绍每个部分的主要内容。
控制电路部分包括PLC、IO模块等。
PLC是机械手控制的核心,负责读取传感器信号并控制执行器的动作。
IO模块则负责将信号转换为PLC能接受的信号进行处理。
执行器驱动电路部分主要负责控制电机动作。
电机的选择与应用需要根据机械手的具体要求而定,需要注意的是,电机的转矩和功率需要协调匹配,还需要注意电机的供电和控制电路之间的配合问题。
电源系统是机械手控制系统的基础之一,电源的大小和控制器的匹配与应用直接关系到系统的正常运行。
需要根据需要提供相应的电压以及功率供给系统。
软件设计在软件设计方面,我们借助PLC程序进行控制,根据机械手的执行需要编写相应的程序,实现机械手的移动、旋转、夹取或放置操作。
具体流程如下:1. 初始化- 设定初始位置和状态等参数;2. 等待操作信号- 根据设定的信号进行等待;3. 传感器检测- 检测对象的位置和状态;4. 判断操作- 根据传感器检测结果进行相应操作;5. 输出控制信号- 控制执行器动作,改变机械手所处的位置和状态。
测试与优化测试与优化是机械手控制系统设计的重要一步,目的是检查系统的稳定性和准确性。
在测试过程中,需要测试机械手的各种运动状态,比如加速度、负载、速度等参数,以确定机械手的质量和性能优化方向。
基于PLC机械手控制系统设计

2024-04-29
• 项目背景与意义 • 整体方案设计 • 硬件选型 • 程序设计 • PLC仿真 • 项目总结与展望
目录
Part
01
项目背景与意义
机械手控制系统优势
效率高、准确高
高生产自动化程度,有利于 提高材料的传送、工件的装 卸、刀具的更换以及机器的 装配等的自动化程度,提高 生产效率,降低生产成本
改善劳动条件
避免人身事故,代替人安全 地在高温、高压、低温、低 压、有灰尘、噪声、臭味、 有放射性或有其它毒性污染 以及工作空间狭窄等场合中 完成工作。
自动化程度高,成本低
采用PLC控制系统,实现远 程监控和自动调节,提高运 维效率,降低了人工成本。
Part
02
整体方案设计
系统硬件设计
plc选型 机械手的位置反馈是开关量控制,所需的I/0点数量并不多,所以使用一般 的小型plc的选择就可以了。由于所需要的 I/0 点数分别为 20 点和12 点, 因此本设计选用西门子S7-226来实现控制
2)通过下面一排拉杆模拟PLC输入信号,通过观察Q点输出亮灯情况检查程序。
组态制作
新建一个工程,触摸屏的类型选择TPC7062TD
2)制作主页面。
组态制作
在设备窗口中添加-通用串口父设备和西门子_S7200PPI
2)双击西门子_S7200PPI,增加设备通道,并且连接对应的数据库,是PLC与触摸屏互相通信。
Part
03
硬件选型
plc硬件接线图简图
选型与配置方案
PLC控制器
使用一般的小型plc的选择就可以 了。由于所需要的 I/0 点数分别 为 20 点和12 点,因此本设计选 用西门子S7-226来实现控制。
基于PLC的物料搬运机械手设计
进 行 阐述 。所设 计 的机 械手 可 完成 机 械手旋 转 、 臂 垂直 手 上 下 、 水平 移动 、 爪旋 转 4个 自由度 的控 制 。 手臂 手
2 总体 概 况 2J 机 械 手 组成 .
按 复 位 按扭 后 ,L P C控 制 转盘 电机 、 横轴 和竖 轴 步 进
电机使 机 械手 运 行 到初 始位 置 。 按 启 动按 扭 后 , L P C控 制 转 盘 电 机 正 转 ,通 过底 盘 光 电 传 感 器记 数 到 达设 定 位 置 后 驱 动 转 盘 电机 反 转 , 运
该物 料 搬 运 机械 手 为 坐标 式 机 械 手 ,由机 械 手装 置
行 到设定位 置 1 ,L 后 P C控 制 横 轴 和 竖 轴 步 进 电机 , 横
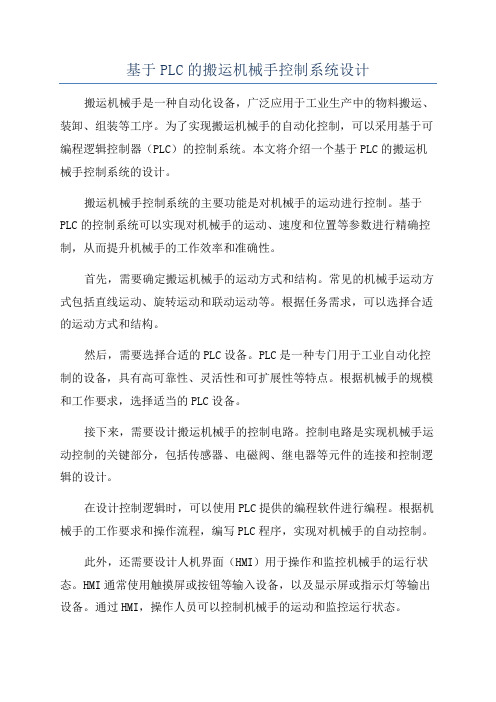
( ) 同样 条 件 下 , 部 空 心轴 的应 力 和变 形 以及 受 2在 局 动 载 荷影 响程 度 介 于实 心轴 和整 体空 心 轴之 间 。 ( ) 有 考 虑 整 体 空 心 轴 和 局 部 空 心轴 的结 构 细 节 3没 以及 实 际 加工 工 艺 对 强 度 和 刚度 的影 响 , 旨在对 l固 定 t 式 矿 车车 轴 的 轻 型化 途 径进 行 探 讨 ,为 车 轴轻 型 化 实 用 设 计 奠定 前期 基 础 。
心轴 。
作者 简介 : 文娟 (9 3 )女 , 徐 16 一, 硕士 , 教授 , 主要从事教 学管理和机械
5 结
论
矿设备设计 [ . 京 : M] 北 冶金工业出版社 ,9 7 17 . [ 3] 成大先. 机械设计手册[ . M] 北京 : 化学 工业 出版社 ,0 3 2 0.
( 编辑 毕 胜)
由上 述 分 析 结 果 可 知 , 满 足 强 度 、 度 条 件 下 , 在 刚 理
(完整版)基于PLC的搬运机械手控制系统设计112
基于PLC的搬运机械手控制系统设计摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运,可以更好的节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
本机械手的机械结构主要是曲轴在两条生产线之间搬运任务的搬运机械手控制系统进行设计。
采用了电气一体化的设计方案,使用带自锁功能的气缸实现了机械手对工件的抓放和保证了在断气状态下机械手状态的保持,通过伺服电机来实现机械手在水平、竖直方向快速精确的移动。
采用SIEMENS公司的SIMATIC S7-200系列PLC 作为核心控制器,外扩定位模块EM253模块对伺服电机进行精确的定位控制,从硬件和软件两个方面进行设计,完成了PLC在搬运机械手中硬件连接,I/O点分配和应用程序的设计,实现了机械手的上电初始化、零点复位、故障报警、手动运行、半自动运行和在无人看守时的自动运行。
最终达到设计要求,完成搬运目的。
关键词搬运机械手定位模块EM2253控制系统可编程PLC SIMATIC S7-200 系列PLC 核心控制器。
目录目录 (2)1引言 (1)1.1 搬运机械手的应用简况 (1)1.2机械手的应用意义 (2)2系统设计 (2)2.1系统结构及流程 (2)2.2系统主要部件选择 (4)2.2.1气缸的选择 (5)2.2.2阀门的选择 (6)2.2.3行程开关的选择 (6)2.2.4接近开关的选择 (6)2.2.5驱动电机的选择 (6)3控制系统的硬件设计 (7)3.1控制系统功能 (7)3.2控制系统硬件结构 (8)3.2.1位控模块 (8)3.2.3控制系统硬件结构 (9)3.3操作面板的设计 (9)3.4 PLC系统设计 (11)3.4.1 PLC 的I/O 分配表 (11)3.4.2 PLC 的I/O 接线图 (11)3.5运动控制系统的实现 (12)3.6控制系统电路设计 (17)4系统软件的设计与实现 (19)4.1系统工作方式 (19)4.2程序设计 (19)4.2.1主程序设计 (19)4.2.2初始化子程序设计 (20)4.2.3复位子程序设计 (20)4.2.4报警子程序设计 (21)4.2.5手动运行子程序设计 (21)4.2.6半自动运行子程序 (22)4.2.7自动子程序设计 (23)5结束语 (25)致谢 (26)参考文献 (27)附录1系统配件清单 (28)附录2程序清单 (28)1引言1.1搬运机械手的应用简况在现代工业中,生产过程的机械化、自动化已成为突出的主题。
基于PLC的搬运机械手控制系统的设计
基于PLC的搬运机械手控制系统的设计本文是基于PLC的搬运机械手控制系统的设计。
根据搬运机械手控制系统给出了控制流程图、阐述了用FX2N-1PG作上位机控制步进电机按一定角度旋转原理、用PLC作上位机控制伺服电机动作原理。
详细描述了基于PLC的搬运机械手控制系统的设计的硬件接线图和设计程序。
并进行了试验验证。
该设计合理规范并能实现搬运机械手控制系统的控制要求。
标签:S7-300PLC 步进电机伺服电机FX2N-1PG模块细分定位脉冲搬运机械手控制系统主要由日本三菱公司的FX2N系列PLC的特殊功能模块FX2N-1PG、步进驱动器、步进电动机和气动控制系统实现运行控制,具有抓取、放松、上升、下降和180°回旋功能,并能沿丝杆导轨做左右水平移动,同时配合伺服驱动器、、伺服电机将成品物料送到指定仓库各站点。
控制系统示意图:一、用PLC控制搬运系统的设计原理搬运机械手系统运用日本三菱公司的FX2N系列PLC对机械手进行一系列的控制,最终目的是把物料准确的送入指定仓库。
要实现准确定位主要涉及到FX2N-1PG模块的定位功能,步进驱动、步进电机和伺服驱动、伺服电机的动作原理。
1.定位脉冲输出模块FX2N-1PGFX2N-1PG定位脉冲输出模块,可输出一相脉冲数、频率可变的定位脉冲(最大100KHz,脉冲量32位),通过连接伺服电机或步进电机驱动器能实现独立1轴的简单定位控制。
首先了解PLC与1PG的体系结构关系。
FX2N-1PG是独立于PLC主机外的扩充模块,以数据总线连接。
模块依据安装位置先后自动设为K0~K7编号地址,所以必须有特殊的PLC数据写入指令,再配合时序及逻辑控制写入FX2N-1PG 寄存器内。
2.用PLC作上位机控制步进电机动作设计原理搬运机械手的定位控制可由PLC、步进驱动和步进电动机实现运行控制。
机械手运行过程为:回原点——定位运行——返回停止。
在机械手运行进程中,若碰到相应方向的极限开关时,机械手立即停止。
课程设计_PLC搬运物品机械手控制设计
课程设计_PLC搬运物品机械手控制设计PLC(Programmable Logic Controller)搬运物品机械手控制设计是一门工业自动化领域的课程。
在制造业中,物品搬运常常是非常繁琐的工作,因此机械手的出现给了制造业带来极大的便利。
机械手需要通过PLC来进行控制,通过对PLC程序的编程,可以让机械手对物品进行精准搬运。
本文将介绍PLC搬运物品机械手控制设计的相关知识和实践操作。
一、搬运物品机械手控制设计的基本知识1. PLC的基本概念PLC(Programmable Logic Controller)即可编程控制器,是一种专门用于控制工业生产过程的计算机硬件,也是一种特殊的计算机控制系统。
PLC控制器主要由中央处理器(CPU)、输入/输出模块(I/O)、电源部分和编程器四个部分组成。
PLC控制器的任务是将输入设备的信号转换为控制信号去驱动输出设备,从而实现控制过程。
2. 机械手的基本概念机械手(Robotic Arm)是一种可以代替人手进行工业生产操作的机器人。
它主要由机械臂、控制器、传感器、执行器等多个部件组成。
机械手在工业生产中可以起到非常重要的作用,在电子、汽车、食品等工业领域都有广泛应用。
3. 搬运物品机械手的基本工作原理搬运物品机械手的基本工作原理是通过控制机械手的关节转动和末端执行器的运动来实现物品的搬运。
在实际应用中,机械手需要进行复杂的运动规划,通过PLC对机械手进行精准的控制,可以实现对物品的精准搬运。
二、PLC搬运物品机械手控制设计的实践操作在PLC搬运物品机械手控制设计的实践操作中,我们需要通过PLC编程来实现搬运物品机械手的自动化控制。
1. 确定控制策略在控制机械手的过程中,需要明确控制策略,比如机械手的运动轨迹、动作的先后顺序、运动速度等。
在PLC编程中,可以通过编写具体的程序来实现控制的策略。
2. 设计PLC程序在PLC编程之前,我们需要根据机械手控制的策略来设计PLC程序。
(完整版)基于plc的机械手控制系统设计
前言随着我国工业生产的飞跃发展,自动化程度的迅速提高,实现工件的装卸、转向、输送或操持焊枪、喷枪、扳手等工具进行加工、装配等作业的自动化,已愈来愈引起人们的重视。
机械手是在机械化、自动化生产过程中发展起来的一种新型装置。
近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用,生产中应用机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。
本文将通过西门子PLC控制机械手,PLC是可编程控制器(Programmable Logic Controller)的简称,是在继电顺序控制基础上发展起来的以微处理器为核心的通用的工业自动化控制装置。
随着电子技术和计算机技术的迅猛发展,PLC的功能也越来越强大,更多地具有计算机的功能。
目前PLC已经在智能化、网络化方面取得了很好的发展。
该系统利用西门子PLC,在步进电机驱动下,完成对机械手在搬运过程中的下降、夹紧、上升、右旋、下降、放松、上升、左旋等全过程自动化控制,并对非正常情况实行自动报警和自动保护,实现企业的机电一体化,提高企业的生产效率。
1机械手概述1.1机械手简介机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
基于PLC的搬运机械手控制系统设计

基于PLC的搬运机械手控制系统设计PLC(可编程逻辑控制器)是一种广泛应用于自动化领域中的控制设备,它拥有可编程的逻辑控制功能,具有高精度、高可靠性、动态稳定性好等特点。
在制造业中,搬运机械手广泛应用于对生产线上产品的搬运,包装和装载等操作。
基于PLC 的搬运机械手控制系统就是将PLC作为核心控制器,实现对搬运机械手的控制和调节,从而提高其工作效率和精度。
搬运机械手控制系统设计基于PLC的搬运机械手控制系统的设计由以下几个部分组成:1. 机械结构设计:机械结构是搬运机械手控制系统的基本构成部分,包括机械臂、传动机构和夹持机构等。
机械结构的设计需要考虑机械臂的长度、强度、重量、运动速度和角度等参数。
传动机构包括电机、减速器、传动轮等,其作用是将电机转换为机械臂的运动。
夹持机构用于夹持待处理的物品,实现搬运和装载等操作。
2. 电气设计:电气设计包括控制系统的电源、控制器、传感器和执行器等。
控制系统的电源是供电保障,必须保证输入电压稳定。
控制器根据输入信号实现对机械手的控制,包括控制信号的生成、控制程序的调试和PID调节等。
传感器用于实时获取机械手的位置、状态和运动方向等信息。
执行器执行机械手的运动和夹持等功能。
3. 软件设计:PLC控制器是基于程序的工作,程序的编写需要考虑搬运机械手的不同工作场景和判据,以实现自动化控制。
软件设计主要包括程序设计和逻辑控制等。
程序设计是根据搬运机械手的功能和运动方式编写程序,以实现对机械手的控制、调节和监测。
逻辑控制是根据具体工作场景进行逻辑判断,实现机械手的自动化控制动作。
基于PLC的搬运机械手控制系统的特点基于PLC的搬运机械手控制系统在制造业中得到广泛应用,其具有以下特点:1. 稳定性好:PLC控制器控制器稳定性好,能够长时间连续工作,不易出现故障。
2. 精度高:PLC控制器具有高精度的控制能力,能够控制搬运机械手的精度和速度,以及对物品的判别和定位等。
3. 可编程性强:PLC控制器采用可编程的逻辑控制,能够为不同的工作场景编写程序,实现自动化控制。
基于PLC控制的搬运机械手的设计

毕业设计(论文)毕业设计(论文)题目:基于PLC控制的搬运机械手的设计分校(点):松江年级、专业: 16级机械电子工程教育层次:本科学生姓名:李延昌学号: 20162310070183 指导教师:黄伟华完成日期: 2018年10月30日目录内容摘要关键词 (I)文献综述 (Ⅱ)1.引言 (6)2.机械手综合方案具体设计 (6)2.1.机械手具体功能及其相应的技术要求 (6)2.2.机械手综合结构具体设计 (6)2.3.机械手基本部件 (6)2.3.1.机械手基本部件相关组成 (6)2.4.机械手实际动作过程 (7)2.4.1.机械手具体动作形式及其相应的顺序 (7)2.5.当机械手进行实际运动时的相关参数 (7)3.机械手相关传动机构及其相应执行机构的具体设计 (8)3.1.模块化设计 (8)3.1.1.模块化设计遵循的基本原则 (8)3.1.2.模块化设计常规方法 (8)3.2.机械手的具体组成及其模块化应用 (8)3.3.机械手具体结构组成及其相应的设计流程 (8)3.3.1.机械手具体结构 (8)3.3.2.机械手综合设计流程 (9)3.4.机械手执行机构的相关设计 (9)3.4.1.机械手手部结构的相关设计 (9)3.4.2.机械手手部结构(夹持爪)的相关计算 (10)3.5.机械手手臂结构的相关设计 (11)4.机械手驱动系统相关设计 (12)4.1.气动驱动系统相关设计 (12)4.2.气动元件具体选择 (12)4.2.1.气压泵具体选择 (12)4.2.2.气动系统中的多样化控制元件 (13)5.机械手控制系统的相关设计 (13)5.1.I/O点数实际分配 (13)5.2.PLC程序设计 (14)5.2.1.综合程序框图 (14)5.2.3.自动控制程序 (15)6.总结及展望 (16)6.1.总结 (16)6.2.展望 (16)参考文献 (17)致谢 (18)内容摘要现如今,全球科技正在不断蓬勃发展,在此期间,机械手在制造领域中,获得了相对广泛的实际应用。
搬运机械手的PLC控制系统设计论文
搬运机械手的PLC控制系统设计论文搬运机械手的PLC控制系统设计论文随着工业自动化的不断发展,机械手已经成为工业自动化的主要组成部分。
机械手具有高度灵活性和应用性能,能够用于各种不同的应用场景,如装配、搬运、包装等。
其中,搬运机械手的应用越来越广泛,这种机械手能够在生产过程中自动搬运物品,从而提高了生产效率和质量。
而机械手的PLC控制系统则是机械手正常运行的重要组成部分。
本文将从机械手的基本原理、PLC控制系统的设计原则以及案例分析等方面,对搬运机械手的PLC控制系统进行详细阐述。
一、搬运机械手的基本原理搬运机械手是一种通过电动轴的组合来控制硬件机械执行动作的机器。
它主要由操作系统、机械臂、执行器、传感器和控制系统等组成。
其中,机械臂是机械手的主体部分,它通过运动学算法完成运动轨迹的规划和控制。
机械手的控制参数主要包括机械手的速度、加速度、位置、力量和时间等。
为了实现对机械手全面、精确、可靠的控制,需要采用PLC控制系统。
二、PLC控制系统的设计原则PLC控制系统主要负责完成机械手的动作控制、通信控制、数据处理等任务。
其设计原则主要有以下几点:1.安全性设计原则。
机械手在运动时会产生一定的力量和速度,因此需要确保PLC控制系统具有良好的安全性。
系统应该包含紧急停止功能和自动刹车功能,以避免机械手对工作环境和操作人员产生危险。
2.可靠性设计原则。
机械手在生产场地中的工作是长时间、高负荷的,因此PLC控制系统需要具有高度的可靠性,以避免由于系统故障导致生产中断和经济损失。
3.灵活性设计原则。
机械手在生产场地中需要完成各种不同的任务,因此PLC控制系统需要具有高度的灵活性,从而能够根据具体情况进行定制化改动和优化。
三、PLC控制系统设计流程PLC控制系统设计流程主要包括五个步骤:需求分析、功能设计、系统设计、编程调试和系统维护。
1.需求分析。
在控制系统设计之前,需要进行充分的需求分析,确定机械手的控制参数、通信协议、数据处理等基本要求。
(完整版)搬运机械手PLC控制系统设计毕业设计论文
优秀论文审核通过未经允许切勿外传设计题目搬运机械手PLC控制系统设计学生姓名孙飞龙专业班级机电一体化(1)班指导老师张兰仙机电工程系搬运机械手PLC控制系统设计毕业设计摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运, 可以更好地节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
本机械手的机械结构主要包括由两个电磁阀控制的液压钢来实现机械手的上升下降运动及夹紧工件的动作,两个转速不同的电动机分别通过两线圈控制电动机的正反转,从而实现小车的快进、慢进、快退、慢退的运动运动;其动作转换靠设置在各个不同部位的行程开关(SQ1---SQ9)产生的通断信号传输到PLC控制器,通过PLC内部程序输出不同的信号,从而驱动外部线圈来控制电动机或电磁阀产生不同的动作,可实现机械手的精确定位;其动作过程包括:下降、夹紧、上升、慢进、快进、慢进、延时、下降、放松、上升、慢退、快退、慢退;其操作方式包括:回原位、手动、单步、单周期、连续;来满足生产中的各种操作要求。
关键词:搬运机械手,可编程控制器(PLC),液压,电磁阀目录前言 (1)第一章机械手的概况1.1 搬运机械手的应用简况 (2)1.2 机械手的应用意义 (3)1.3 机械手的发展概况 (3)第三章搬运机械手PLC控制系统设计3.1 搬运机械手结构及" title="下一页">> >> >>| 其动作………………………………………………3.2 搬运机械手系统硬件设计………………………………………………3.3 搬运机械手控制程序设计………………………………………………1 操作面板及动作说明……………………………………………………2 IO分配…………………………………………………………………3 梯形图的设计……………………………………………………………1)梯形图的总体设计……………………………………………………2)各部分梯形图的设计…………………………………………………3)绘制搬运机械手PLC控制梯形图……………………………………结论………………………………………………………………………………谢辞………………………………………………………………………………参考文献…………………………………………………………………………………. 附:语句表梯形图 IO接线图前言机械手:mechanical )和柔性制造单元FMC(Flexible Manufacturing Cell)中重要一环。
搬运机械手及其PLC控制系统设计
搬运机械手及其PLC控制系统设计搬运机械手是指一种带有机械手臂的机器人,它能够在工厂生产线上完成基于机械手臂的物料搬运或组装工作。
搬运机械手是现代工业自动化生产的重要组成部分,能够极大地提高生产效率和产品质量。
本文将讨论如何利用PLC控制系统来控制搬运机械手的运动和动作。
搬运机械手的构造及工作原理搬运机械手由控制系统、机械手臂、末端执行器等组成。
机械手臂通常由几个关节构成,末端执行器通常是用来夹取或放置物料的夹爪或叉子。
机械手臂的关节通过电动机或气动马达驱动,使整个机械手臂能够在指定轨迹上移动和旋转,可实现各种不同的动作。
搬运机械手的运动自由度一般为5-6个。
PLC控制系统的作用PLC(可编程逻辑控制器)是一种数字计算机系统,能够用来控制工业生产线上的各种机器和设备。
它以一种特殊的编程语言进行编程,能够实现很多功能,如数字逻辑控制、数据处理和通信控制等。
在搬运机械手的控制系统中,PLC起到了至关重要的作用。
PLC控制系统的设计过程搬运机械手的PLC控制系统通常由以下几个组成部分:①输入输出模块:用来将搬运机械手需要的各种输入输出信号与PLC连接起来。
②PLC主控模块:是PLC的核心部分,用来处理信号和进行控制逻辑的编程。
③控制模块:根据PLC主控模块编程的指令进行控制机械手的运动和动作。
在进行PLC控制系统的设计时,常用的方法包括:1. 从用户需求出发,确定搬运机械手在生产线上的定位和任务要求。
2. 根据机械手的运动自由度和工作要求,设计机械臂和末端执行器的运动轨迹和动作方式。
3. 将机械手所需的各种输入输出信号与PLC输入输出模块进行连接。
4. 对机械手的动作进行编程和调试,完成PLC控制系统的设计。
PLC控制系统的优势与传统的电控系统相比,PLC控制系统有以下几个优势:1. 稳定性高:PLC控制系统由于采用的电路板、电容器内置式、电源系统自带式等设计,机电噪声、电磁干扰等都得到了有效控制,稳定性高。
(完整版)基于PLC的搬运机械手控制系统设计112
基于PLC的搬运机械手控制系统设计摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运,可以更好的节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
本机械手的机械结构主要是曲轴在两条生产线之间搬运任务的搬运机械手控制系统进行设计。
采用了电气一体化的设计方案,使用带自锁功能的气缸实现了机械手对工件的抓放和保证了在断气状态下机械手状态的保持,通过伺服电机来实现机械手在水平、竖直方向快速精确的移动。
采用SIEMENS公司的SIMATIC S7-200系列PLC 作为核心控制器,外扩定位模块EM253模块对伺服电机进行精确的定位控制,从硬件和软件两个方面进行设计,完成了PLC在搬运机械手中硬件连接,I/O点分配和应用程序的设计,实现了机械手的上电初始化、零点复位、故障报警、手动运行、半自动运行和在无人看守时的自动运行。
最终达到设计要求,完成搬运目的。
关键词搬运机械手定位模块EM2253控制系统可编程PLC SIMATIC S7-200 系列PLC 核心控制器。
目录目录 (2)1引言 (1)1.1 搬运机械手的应用简况 (1)1.2机械手的应用意义 (2)2系统设计 (2)2.1系统结构及流程 (2)2.2系统主要部件选择 (4)2.2.1气缸的选择 (5)2.2.2阀门的选择 (6)2.2.3行程开关的选择 (6)2.2.4接近开关的选择 (6)2.2.5驱动电机的选择 (6)3控制系统的硬件设计 (7)3.1控制系统功能 (7)3.2控制系统硬件结构 (8)3.2.1位控模块 (8)3.2.3控制系统硬件结构 (9)3.3操作面板的设计 (9)3.4 PLC系统设计 (11)3.4.1 PLC 的I/O 分配表 (11)3.4.2 PLC 的I/O 接线图 (11)3.5运动控制系统的实现 (12)3.6控制系统电路设计 (17)4系统软件的设计与实现 (19)4.1系统工作方式 (19)4.2程序设计 (19)4.2.1主程序设计 (19)4.2.2初始化子程序设计 (20)4.2.3复位子程序设计 (20)4.2.4报警子程序设计 (21)4.2.5手动运行子程序设计 (21)4.2.6半自动运行子程序 (22)4.2.7自动子程序设计 (23)5结束语 (25)致谢 (26)参考文献 (27)附录1系统配件清单 (28)附录2程序清单 (28)1引言1.1搬运机械手的应用简况在现代工业中,生产过程的机械化、自动化已成为突出的主题。
基于PLC的物料搬运机械手控制系统设计
毕业论文题目:基于PLC的物料搬运机械手控制系统设计学生姓名:袁涛学生学号:**********系别:电气信息工程学院专业:自动化届别:2012届指导教师:孙静基于PLC的物料机械搬运手自动化控制系统设计学生:袁涛知道教师:孙静淮南师范学院电气信息工程系摘要:机械手在先进制造领域中扮演着极其重要的角色。
它可以搬运货物、分拣物品、代替人的繁重劳动。
可以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因此被广泛应用。
本文在纵观了近年来机械手发展状况的基础上,结合机械手方面的设计,对机械手技术进行了系统的分析,提出了用气动驱动和PLC控制的设计方案。
采用整体化的设计思想,充分考虑了软、硬件各自的特点并进行互补优化。
对物料分拣机械手的整体结构、执行结构、驱动系统和控制系统进行了分析和设计。
在其驱动系统中采用气动驱动,控制系统中选择PLC的控制单元来完成系统功能的初始化、机械手的移动、故障报警等功能。
最后提出了一种简单、易于实现、理论意义明确的控制策略。
关键词:机械手,气动控制,可编程控制器(PLC),自动化控制,物料分拣Based on PLC material handling robot control system designStudent: YuanTaoKnow the teacher: ms. Sun jingHuainan normal college electrical information engineeringAbstract:In advanced manufacturing robot plays a very important role. It can carry goods, sorting items, instead of human heavy labor. Can realize the mechanization of manufacturing and automation, can in harmful environment operation to protect the personal safety and so widely usedIn this paper a review in recent years on development status of manipulator, combined with the design of manipulator, the technology of the manipulator system analysis, and put forward the pneumatic drive and PLC control in the design. The design idea of integration, the full consideration of the characteristics of the software and hardware and complementary optimization. For the material sorting the structure of the manipulator, executive structure, driving system and control system analysis and design. In its drive system by pneumatic drive, the choice in the control system of the control unit to complete PLC system function initialization, the mobile manipulator, fault alarm functions. Finally puts forward a simple and easy to realize and theoretical significance specific control strategy.Key words: manipulator;pneumatic control;the programmable controller (PLC);automatic control;material sorting前言机械手作为前沿的产品应自动化设备更新时的需要,可以大量代替单调往复或高精度需求的工作,在先进制造领域中扮演着极其重要的角色。
基于PLC的搬运机械手控制系统设计程序

// 启动系统LD I0.0ON M0.0AN I1.4AN I1.5= M0.0// 系统初始化LD SM0.1CALL SBR0// 试灯LD I0.1= Q0.0= Q0.1= Q0.2= Q0.3= Q0.4= Q0.5= Q0.6// 上电后200ms延时接通伺服电源LD SM0.0LPSAN Q1.5AN Q1.6TON T37, 2LPPA T37S Q1.5, 2// 伺服电源接通后伺服报警清零输出点Q1.7产生一个300ms的清零脉冲信号LD Q1.5A Q1.6LPSEUS Q1.7, 1LRDA Q1.7TON T33, 30LPPA T33R Q1.7, 1// 伺服1位控模块0启动LD M0.0A M0.1A Q2.0= L60.0LD I1.4O I1.5O Q2.2O I1.6O I2.0= L63.7LD L60.0CALL SBR1, L63.7, M4.0, VB66, VD0, VD68, M3.0 // 伺服2位控模块0启动LD M0.0A M0.1A Q2.1AN Q2.3= L60.0LD I1.4O I1.5O Q2.3O I2.1O I2.3= L63.7LD L60.0CALL SBR12, L63.7, M4.1, VB67, VD4, VD72, M3.1 // 调用复位子程序LD I0.2A I0.4A Q1.5A Q1.6CALL SBR23// 手动子程序刚开始调用时,步进脉冲数清零LD I0.4A M0.0LPSCALL SBR27EUR Q2.2, 2S Q2.0, 2LPPMOVD 0, VD118MOVD 0, VD122MOVD 0, VD110MOVD 0, VD114// 半自动程序刚开始调用时,步进脉冲数清零LD I0.5A M0.0LPSCALL SBR26EUR Q2.2, 2S Q2.0, 2LPPMOVD 0, VD118MOVD 0, VD122MOVD 0, VD110MOVD 0, VD114// 自动子程序LD M0.0A I0.3CALL SBR25EUR Q2.2, 2S Q2.0, 2// 报警处理LD SM0.0CALL SBR24// 急停后,伺服停止,气缸保持LD I1.4S Q2.0, 2S Q2.4, 1R Q2.5, 1初始化子程序:// 伺服电源接通后延时30s系统初始化LD Q1.5A Q1.6LPSAN M0.1TON T38, 300LPPA T38S M0.1, 1// 首次上电或者回参考点状态时,状态位置位LD M0.1A I0.3EUS Q2.1, 2R M3.0, 5R M4.0, 10R Q2.2, 2MOVB 0, VB20MOVW 0, VW16MOVW 0, VW18MOVW 0, VW12MOVW 0, VW14R Q2.4, 1S Q2.5, 1Network 3LD M0.1MOVD 100000, VD500MOVD 20000, VD504MOVD 1000000, VD508MOVD 50000, VD512复位子程序:Network 1LD I0.2S M0.5, 1// 伺服1复位LD M0.5= L60.0LD I0.2= L63.7LD L60.0CALL SBR5, L63.7, M4.3, VB68 // 伺服2复位LD M0.5= L60.0LD M4.3= L63.7LD L60.0CALL SBR16, L63.7, M4.4, VB69 // 机械手爪松开LD M0.5S Q2.5, 1R Q2.4, 1// 复位完成LD I2.2R M0.5, 1R M4.3, 2END_SUBROUTINE_BLOCK报警子程序:// 伺服1报警LD I1.6O I2.0O I2.6AN Q1.7= M0.2// 伺服2报警LD I2.1O I2.3O I2.7AN Q1.7= M0.3// 伺服运动过程中松开工件报警LD I0.6O I0.7O I1.0O I1.1A I0.4A I1.3= M0.4// 报警灯显示LD M0.2O M0.3O M0.4= Q0.0自动子程序:// 网络注释LD I0.0O M0.7S M0.6, 1// 伺服1复位LD I0.3= L60.0LD M0.6= L63.7LD L60.0CALL SBR5, L63.7, M4.5, VB70 // 伺服2复位LD I0.3= L60.0LD M4.5= L63.7LD L60.0CALL SBR16, L63.7, M4.6, VB71//参数复位LD I2.2R M0.6, 1R M4.5, 2// 伺服1下降LD I0.3A I2.4AN I2.0= L60.0LD I2.2EU= L63.7LD L60.0CALL SBR3, L63.7, VD500, VD504, 1, I1.4, M4.7, VB70, VD76, VD80 // 下降指示灯LD I2.2O Q1.0AN M4.7= Q0.2// 伺服1下降完成LD I3.0AN T39= Q1.0// 夹紧工件,等待2秒LD Q1.0S Q2.4, 1R Q2.5, 1AN T39TON T39, 20// 夹紧指示灯LD I3.0O Q0.5AN Q2.5= Q0.5// 夹紧完成LD T39AN Q2.5= Q1.3// 伺服1上升LD I0.3AN I1.6= L60.0LD Q1.3= L63.7LD L60.0CALL SBR5, L63.7, M5.0, VB71// 上升指示灯LD T39ON Q0.1AN M5.0AN I3.0= Q0.1// 上升完成LD I1.7= Q0.7// 伺服2前进LD Q2.4AN I2.3= L60.0LD Q0.7= L63.7LD L60.0CALL SBR14, L63.7, VD508, VD512, 1, I1.4, M5.1, VB72, VD84, VD88 // 前进指示灯LD Q0.7ON Q0.3AN M5.1AN I3.1= Q0.3// 前进完成LD I3.1AN T40= Q1.1// 到达前进工位后伺服1下降LD Q2.4A I2.5AN I2.1= L60.0LD Q1.1= L63.7LD L60.0CALL SBR3, L63.7, VD500, VD504, 1, I1.4, M5.2, VB73, VD92, VD96 // 下降指示灯LD I3.1ON Q0.2AN M5.2= Q0.2// 下降完成LD I3.0AN T40= Q1.0// 放下工件,等待2秒LD Q1.0S Q2.5, 1R Q2.4, 1R M4.7, 4AN T40TON T40, 20// 松开指示灯LD Q1.0ON Q0.6AN Q2.4= Q0.6// 松开完成LD T40= Q1.4// 重复动作LD Q1.4= M0.7半自动子程序:// 网络注释LD I0.5S M0.6, 1// 伺服1复位LD I0.3= L60.0LD M0.6= L63.7LD L60.0CALL SBR5, L63.7, M4.5, VB70 // 伺服2复位LD I0.3= L60.0LD M4.5= L63.7LD L60.0CALL SBR16, L63.7, M4.6, VB71 //参数复位LD I2.2R M0.6, 1R M4.5, 2// 伺服1下降LD I0.3A I2.4AN I2.0= L60.0LD I2.2EU= L63.7LD L60.0CALL SBR3, L63.7, VD500, VD504, 1, I1.4, M4.7, VB70, VD76, VD80 // 下降指示灯LD I2.2O Q1.0AN M4.7= Q0.2// 伺服1下降完成LD I3.0AN T39= Q1.0Network 8// 夹紧工件,等待2秒LD Q1.0S Q2.4, 1R Q2.5, 1AN T39TON T39, 20// 夹紧指示灯LD I3.0O Q0.5AN Q2.5= Q0.5// 夹紧完成LD T39AN Q2.5= Q1.3// 伺服1上升LD I0.3AN I1.6= L60.0LD Q1.3= L63.7LD L60.0CALL SBR5, L63.7, M5.0, VB71// 上升指示灯LD T39ON Q0.1AN M5.0AN I3.0= Q0.1// 上升完成LD I1.7= Q0.7// 伺服2前进LD Q2.4AN I2.3= L60.0LD Q0.7= L63.7LD L60.0CALL SBR14, L63.7, VD508, VD512, 1, I1.4, M5.1, VB72, VD84, VD88 // 前进指示灯LD Q0.7ON Q0.3AN M5.1AN I3.1= Q0.3// 前进完成LD I3.1AN T40= Q1.1// 到达前进工位后伺服1下降LD Q2.4A I2.5AN I2.1= L60.0LD Q1.1= L63.7LD L60.0CALL SBR3, L63.7, VD500, VD504, 1, I1.4, M5.2, VB73, VD92, VD96 // 下降指示灯LD I3.1ON Q0.2AN M5.2= Q0.2// 下降完成LD I3.0= Q1.0// 放下工件,等待2秒LD Q1.0S Q2.5, 1R Q2.4, 1AN T40TON T40, 20// 松开指示灯LD Q1.0ON Q0.6AN Q2.4= Q0.6// 松开完成LD T40= Q1.4// 伺服1上升LD I0.5= L60.0LD Q1.4= L63.7LD L60.0CALL SBR5, L63.7, M5.3, VB74 // 上升指示灯LD Q1.4ON Q0.1AN M5.3= Q0.1// 上升完成LD I1.7= Q0.7// 伺服2后退LD I0.5= L60.0LD Q0.7= L63.7LD L60.0CALL SBR16, L63.7, M5.4, VB75 // 后退指示灯LD Q0.7ON Q1.2AN M5.4= Q1.2Network 28LD I2.2= Q1.2R M4.7, 6手动子程序:// 手动上升LD I0.6AN I1.7AN M1.1AN M1.2AN M1.3= M1.0= Q0.1// 手动下降LD I1.7AN I2.0AN M1.0AN M1.2AN M1.3= M1.1= Q0.2// 伺服1手动LD I0.4= L60.0LD M1.4= L63.7LD M1.0AN I1.6= L63.6LD M1.1AN I2.0= L63.5LD L60.0CALL SBR2, L63.7, L63.6, L63.5, VD504, M3.2, VB74, VD8, VD12, M3.4 // 手动后退LD I1.1AN M1.0AN M1.1AN M1.3= M1.2= Q0.4// 手动前进LD I1.0AN M1.0AN M1.1AN M1.2= M1.3= Q0.3// 伺服2手动LD I0.4= L60.0LD I1.4= L63.7LD I1.2AN I2.1= L63.6LD I1.3AN I2.3= L63.5LD L60.0CALL SBR13, L63.7, L63.6, L63.5, VD512, M3.3, VB75, VD16, VD20, M3.5 // 手动夹紧工件LD I1.2S Q2.4, 1R Q2.5, 1// 夹紧指示灯LD Q2.4AN Q2.5= Q0.5// 手动松开工件LD I1.3S Q2.5, 1R Q2.4, 1// 松开指示灯LD Q2.5AN Q2.4= Q0.6。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2)煤层 沿 走 向 和 倾 向 都 具 有 较 大 的 变 化 ,主 要特 征表现 为厚 薄煤 带 相 间分 布 ,煤 厚 局 部呈 突 变 关 系 ,煤 层整 体上呈 似层状 、藕 节状或 透镜 状 。
据统 计 ,除西部 9301—940l孔一 带有 3个 不 可 采 点集 中分布 外 ,其余 20个 不 可 采 点均 孤 零 分 布 。 不 可 采 点 与 最 低 可 采 厚 度 点 之 间 的 距 离 很 近 ,煤 厚 变化 梯度 大 ,钻孔 计算 值为 0.23—0.46 m/(10 m), 平均 0.37 m/(10 m),矿 井 揭 露 计 算 值 为 0.23~ 3.15 m/(10 m),平 均 1.1 m/(10 m),说 明 煤 层 由不
置 以及 软 件 系统 设 计 。 按 照 该 方 案 设计 组 装 的机 械 手 经过 调试 安装 后 投 入 使 用 ,效 果 良好 。
关键 词 :工 业 自动 化 ;机 械 手 ;控 制 系 统 ;PLC
中 图分 类 号 :TP241
文 献 标 识 码 :B
文 章 编 号 :1003—0506(2011)05—0014—02
表 l 登 封 煤 田煤 层 厚 度 分 级 统计
可采 点 至可采 点 的变 化较 快 。 从 区 内矿 井实 际 回采 揭 露 的情 况来 看 ,煤 厚变
化远 比勘 探 揭 露 的煤 厚 变 化 复 杂 得 多 ,也 大 得 多 。 在 2个 厚煤 钻孔 间 可 能存 在 薄煤 区 ,在 2个 薄煤 钻 孔间 也可 能存在 厚煤 区 。煤 层厚度 经常 在短距 离 内 发 生 较 大 的 变 化 ,从 局 部 来 看 ,煤 层 厚 度 变 化 规 律 并 不 明 显 。
3 机械手控制软件系统设计
机械 手 控制 系 统 软件 为 STEP7.Micro5.2,它 功 能 强大 ,既 可 以作 为用 户开发 控制程 序使用 ,同时也 可 实时监控 用户程 序执行 的状 态 。 3.1 总 体 流 程 设 计
根据 系统 的控 制 要 求 ,机 械 手 动作 时 的 系统 流 程 如 图 4所 示 。 3.2 模 块 梯 形 图 模 块 设 计
2011年 第 5期
中州 煤炭
总第 185期
基 于 PLC 的物 料 搬 运 机 械 手 控 制 系统 设 计
郅 富 标 ,毋 虎 城 ,张 四海 。
(1.河 南理 工 大学 高 等职 业 学 院 ,河 南 焦作 454000;2.河南 煤 业 化 工 集 团 焦煤 公 司九 里 山矿 ,河 南 焦作 454000)
图 2 机 械 手 工 作 顺 序 表 1 机械 手控 制 系统 I/O 分 配表
2 机械 手控 制 系统 硬 件 设 计
2.1 PLC 的 选 型
启 动 按 钮 SB1 10 0 下 移 阀 HL3 9o.0 左移 阀 HL5 复 位 按 钮 sB2 IO l 上 移 阀 HI Qo.1 放 松 阀 HLl 急 停 按 钮 sB3 10.2 右 移 阀 HL6 QO.2 夹 紧 阀 HL2
2011年第 5期
李 丰 良等 :控 制登封 煤 田瓦斯 突 出的地质 要素分 析
总第 185期
变 化 特 征 如 下 : (1)煤 厚变化 大 。煤 厚变 化 在勘 探 期 间钻 孔所
见煤 厚 和煤矿生 产期 间采 掘揭露 中所见 煤厚 都表现 十分 明显 ,据井 田内 196个 勘 探 钻孔 揭 露 的煤 厚资 料统 计 ,煤厚 变 化在 0~26.79 m,平均 煤厚 5.30 m。 其 中 ,煤 厚 3.51~8.00 m 的 比 例 较 高 ,频 率 达 35.7% ;1.31~3.50 m 的 中 厚 煤 点 占 27.6% ;煤 厚 >8 m 和煤 厚 <1.3 m 的较少 ,频率较 低 。煤厚 基本 稳定在 1.3~8.0 in,频 率 达 63.3% ,煤 层 厚 度 分 级 见 表 1。
3 结 语
综 上所述 ,受多 期不 同方 向 、不 同体制 的构造应 力 场作 用 ,登 封煤 田顺煤 层滑 动构造 十分发 育 ,而且 层 滑方 向与 断层倾 向基 本一 致 ,由此 造 成 了煤 层厚 度 变化呈 条带 展布 ,展布方 向与 断层走 向基本 平行 , 使煤 的变 质程 度具 有 分 带 性 。受 滑动 构 造 的影 响 , 登封 煤 田内 二 煤 全 层 构 造 软 煤 发 育 ,煤 厚 变 化 很 大 ,煤 的 原 生 结 构 和 构 造 已 遭 到 严 重 破 坏 ,强 度 很 低 ,是 控 制 瓦 斯 突 出 的 主 导 因 素 。
限位 开关 、光 电开关等 。
2011年第 5期
郅富标 等 :基 于 PLC的物 料搬运 机械 手控 制系统 设计
总第 185期
(1)电 磁 式 限 位 开 关 。 在 此 系 统 中 ,共 用 4个 电磁式 限位 开关 :① 上 升 限位 开 关 。上 升 限位 开 关 用于控 制机械 手在 整 体 上移 时 的 位置 ,防止 机 械 手 向 上 超 出 范 围 。 事 先 在 机 械 手 工 作 平 台 上 方 的 合 适 位置上 安装好 限位 开关 ,当机械 手逐渐 上升 ,直到接 触 到工作 台上 方 的 限位 开 关 时 ,PLC控 制 机械 手 停 止 上升 。② 下 降限位 开关 。下 降 限位开 关用 于控制 机 械手在 整体下 降 时 的位 置 ,防 止机 械 手 向下 运 动 超 出范 围。③左旋 限位 开关 。左旋 限位 开关用 于控 制机 械手手 臂 向左 运 动 时 的位 置 ,防 止 机械 手 手 臂 运 动到位后 过 冲。④右 旋限位 开关 。右旋 限位 开关 用 于 控 制 机 械 手 手 臂 向 右 运 动 时 的 定 位 ,防 止 机 械 手 手 臂 运 动 到 位 后 过 冲 。
机械 手上升
机 械 手 下 降
N Y
lY
瓦 南
机 械手手爪放开
住 丁
回 到原 位
图 4 机 械 手 控 制 系统 流程 示意
部 分 梯 形 图 所 对 应 的 语 句 表 程 序 如 下 :
LSCR SO.1
LD
SM 0.0;
=
M1.1; 机 械 手 手 臂 左 旋
(2)光 电 开关 。在 传 送带 上 有 1个 光 电开 关 , 此 开 关 主 要 用 来 指 示 工 件 是 否 到 位 。
(3)各 种 电磁 阀 。 此 系 统 中 机 械 手 手 臂 的 上 升 和下降是 用气 缸来实 现 的 ,各使 用 1个 气 缸 、1个 电 磁 阀就 能实现手 臂 的上 升和下 降 。机械 手手爪 的夹 紧 、松开 、左 移 、右移 共用 了 4个 电磁 阀 。① 上 升 电 磁 阀 :控 制 气 缸 驱 动 机 械 手 手 臂 上 升 至 设 定 位 置 。 ②下 降 电磁 阀 :控 制气 缸 驱 动 机械 手 手臂 下 降 至设 定位 置 。③ 抓 紧电磁 阀 :控 制气 缸 使 机 械手 手 爪 做 抓紧 动作 。④ 松开 电磁 阀 :控制 气 缸 使机 械 手 手爪 做松 开动作 。⑤右 移 电磁 阀 :控 制 气 缸使 机 械 手 手 臂往右移 动 。⑥ 左 移 电磁 阀 :控 制 气缸 使 机 械 手手 臂 往左移 动 。
当软 件 总体 流程 图设计 完 成后 ,就 需 要对 各个 控 制过程进 行分解 细化 ,这 样 在程 序 编 写 时就 会 简
洁 明 了 ,最 后联 合起来 调试时 也便于 发现 问题 。
下 降 单 杆 气 缸
左 移 单 杆 气 缸
图 3 机 械 手 气 动 控 制 系 统
原 位 开 始
随 着 社 会 进 步 和 科 学 技 术 的 发 展 ,工 业 生 产 的 操 作方式 也发生 革命 性 的变化 ,从 手 工作 坊 式 的 劳 动 逐 步 演 变 成 自动 化 、智 能 化 的 生 产 方 式 ,某 些 生 产 过 程凭手 工也 逐渐 无 法 完成 。 为 了适应 生 产 需要 , 出现 了特 殊 的生产 工具— — 机械手 。 以往 由于 自动 化程度较 低 ,设计 出 的全机 械 式 机械 手 仍操 控 不 灵 活 ,目前 根 据 最 新 的 自动 化 技 术 ,设 计 出 了 以 可 编 程 控 制 器 (PLC)… 为 控 制 核 心 的机 械 手 。
(4)各种 按钮 。急 停按 钮 带锁 ,为 常 闭触 点 ,按 下 后旋 转复 位 ;手 动/自动按 钮 采用 旋 钮 ,一侧 为 常 闭 ,一侧为 常通 ;其 余 按 钮 均采 用 触点 触 发 方 式 ,按 下 即接 通 ,松 开 即复 位 。
(5)气 动 回路 设计 。机械 手 动力 系 统采 用 气 动 控 制 ,其 气 动 控 制 系 统 如 图 3所 示 。
机械手 工作顺 序 :①按 下启 动按钮 sB.后 ,机械 手 开始工作 ;②松 开启动 按钮 sB。,机 械 手停 在 当前 位 置 ;③按 下复位按 钮 sB 后 ,机 械手 在完成 此次操 作后 ,回到 原始位 置 ,然后 停止 ;④松 开复位 按钮 机 械 手 控 制 系 统 组 态
PLS 0; 启 动 高速 脉 冲输 出 ,Q0.0输 出
LD
I1.4
A
l2.O
SCRT SO.2; 左 旋 到 位 ,启 动 状 态 2
SCRE
LSCR SO.2
LD
SMO.0
=
LD
M1.2: 机 械 手 手 臂 下 降
I1.3
(下转 第 39页)
· l5 ·
摘要 :随 着 自动 化 技 术 的不 断发 展 ,机 械 手 的应 用 更 加 普 遍 。 为 使 机 械 手 控 制 更 加 智 能 化 ,操 作 更 加 简 单 方