第三版,化学工业出版社。-自动化专业外语翻译,王树青编。第一章第五节翻译
第三版,化学工业出版社。-自动化专业外语翻译,王树青编。第一章第四节翻译
1.4 过程控制系统的设计1.“好的设计”很难定义,但通常你会认可一些好的设计。
好的设计的一个特征是,它恰好适用于特定的场合。
包括所有需要的,而排除一切所不需要的。
1.好的设计所需要的技巧包括经验、直觉和敏锐的感觉。
这些从课本中并不容易学到。
在设计方面,你最应该从教科书中期望得到的是学到一些有用的工具。
1.就像大多数关于控制系统设计的书一样,本书提供了一些能够被简化成数学公式的工具:分析和仿真。
其它方面的设计技巧(比如整个系统的概念化,部件的选型,处理时间和金钱上的限制等)也像数学分析一样重要,可以通过实践经验不断获得和完善。
1.实际上,大多数系统都通过进化发展的,不仅是生物系统,人类的发明,如汽车和飞机也是这样。
豪华而高性能的汽车可以追溯到简单的T模型;最先进的,甚至只出现在承包商的画板上的战斗机,也是起源于老式的“小鹰”飞机。
1.很多工程是把现有的设计做进一步修改。
现有产品的新型号设计就是引进新的先进技术:一个新型的或改进的传感器或执行器,一个用于替换模拟控制器的数字处理器。
1.模仿法(常被称为反转工程)是另一种常用的设计方法。
通过这种最明显但也最缺乏创意的方法,你可以仔细研究现有产品,然后复制设计方法。
这个过程是合法的,除非产品复制受专利保护。
2.更有创意的模仿法是将一个产品的思想应用到其它领域中去。
当你需要控制容器中的液位时,可以考虑一下在你的厕所中这是怎样实现的。
当你要控制容器中的液体温度时,可以考虑一下你的热带鱼缸是如何做到的。
1.创新总是受规范、标准和工程保守主义的限制。
例如,飞机制造厂用了许多年才接受了“靠电线飞行”的概念,“靠电线飞行”使飞行员控制器(如操纵杆和脚踏板)和可移动的空气动力控制翼面(如方向舵,升降机和副翼)之间的机械连接(如连杆或绳索)被携带信号的电线所取代。
电线把信号从驾驶员控制器传递给飞行控制计算机,然后从计算机传递给位于控制翼面的执行器。
2.尽管工程标准会延迟发展,但在防止技术混乱上仍然是必要的。
研究生英语阅读教程(提高级 第三版)课文全翻译

课文全文参考译文第一课漏油经济:低估风险戴维伦哈特[1] 回想起来,模式似乎很清楚。
早在“深水地平线”钻机自爆前的很多年,BP 石油公司为了省钱甘冒安全的风险就已经声名狼藉。
2005 年得克萨斯州炼油厂爆炸中有15 名工人丧生。
联邦监管机构和前国务卿詹姆斯·贝克三世领导的专门小组认为,削减成本是事故的部分原因。
第二年,阿拉斯加腐蚀的管道将石油漏入普拉德霍湾。
就连乔·巴顿,对全球变暖持怀疑态度、来自得克萨斯州的共和党众议员,都谴责BP 管理人员“对安全和环境问题表现得漠不关心”。
[2] 这种冷漠大部分源于对利润的过度追求,不管出现什么情况。
但似乎也还有另一个因素在起作用,一个更普遍的人性的因素。
BP 的管理人员在估计似乎不太可能发生但一旦发生就会带来巨大损失的事件真正会发生的可能性时,犯了一个可怕的错误。
[3] 也许理解这一点最简单的方法就是思考一下BP 高管们如今的想法。
显然,考虑到清理费用和对BP 声誉的影响,高管们真希望可以回到过去,多花些钱让“深水地平线”更安全。
他们没有增加这笔费用就表明他们认为钻机在当时的状态下不会出问题。
[4] 尽管针对BP 高管的所有批评可能都是他们应得的,但是他们绝不是唯一艰难应对这种低概率、高成本事件的人。
几乎每个人都会如此。
“这些正是我们人类处理时很难做出合理反应的一类事件,”哈佛大学环境经济学家罗伯特·斯塔文斯说。
我们经常犯两种基本且性质相反的错误。
当一件事情是很难想象的,我们往往会低估它的可能性。
这就是众所周知的黑天鹅(稀有之物)现象。
大多数在“深水地平线”工作的人可能从未经历过钻井平台爆炸。
因此他们认为这不会发生,至少不会发生在他们身上。
[5] 同样,不久以前,本·伯南克和艾伦·格林斯潘也喜欢称全国房地产市场没有泡沫,因为以前从未有过泡沫。
华尔街交易员也持同样观点,他们建立的数学模型根本不存在房价下降的可能性。
第三版,化学工业出版社。-自动化专业外语翻译,王树青编。第二章第三节翻译

2.31、这一单元讨论流量测量和仪器仪表所使用的基本术语与公式. 流体流量的测量在工业应用中是非常重要的. 某些设备和操作的最佳性能需要精确的流速. 许多液体和气体的成本都是基于管道中流量的测量,出于核算的目的,必须精确的测量与控制流体的速度(流速,流量).2、这一单元将使用以前单元的术语和定义,同时也会引入一些关于流体和流速测量的新的定义.3、速度是对一个物体速率和方向的测量. 当与流体相关时,指的是管道中流体粒子的流速. 流体流动中,粒子的速率各不相同,比如,当流体与约束壁(边界层)接触时,流体粒子的速度实质上为零;在流体中心,流体颗粒具有最大的速度.4、因此,在流量计算时采用流体的平均速率. 流量的单位通常为英尺每秒(fps),英尺每分钟(fpm),米每秒(mps),等等. 以前(章节中),与流体流量相关的压力定义为静态(压力),冲击(压力),或动态(压力).5、层流发生在液体流速相对较低时,流体粒子在各层中倾向于平滑移动,如图2.3.1(a)所示. 液体中的粒子速度呈抛物线分布. 湍流发生在液速较高,在各层中,粒子不再是平滑移动,而是产生紊乱或旋转. 如图2.3.1(a)所示. 同时也要注意速度分布的扁率.6、粘度是描述气体或液体对运动或流动阻力的一种特性. 粘性的液体比如糖浆,其粘度要远大于水,而水的粘度又高于空气. 由于糖浆的高粘度,它的流动非常缓慢,并很难使一个物体在其中移动.7、动态粘度(或叫绝对粘度)的计量单位是泊或厘泊,而运动粘度(没有力的单位,即没有牛顿单位)的计量单位是沱或厘沱. 动态粘度或绝对粘度用于雷诺数的推导和流体方程中.8、粘度是流体的阻力测量,它是由于剪应力或张应力而形成的。
粘度描述的是流体流动时内部的阻力,并且可认为是液体摩擦力的一种测量。
对流体问题的研究被认为是流变学,其中包括粘度及其相关概念。
动态粘度,也称为绝对粘度,是最常用的概念(典型的单位:帕斯卡.秒,泊,厘泊)运动粘度是动力粘度与液体密度之比(典型的单位:平方米每秒,沱,厘沱)9、雷诺数R代表了一种派生关系,包含了液体的密度和粘度,流体速率和横截面积的大小,并采用如下形式:10、流态(流动型式)可以是层流,湍流,或两者的结合. 1880年,Osborne Reynolds观察到流态可以根据液体的物理特性预测得到. 如果管道中流体的雷诺数等于或小于2000,该流体是层流型式. 雷诺数介于2000到5000之间,该流型处于中间区域,可以是层流,湍流或两者的混合,取决与其它因素. 如果雷诺数大于5000,那么该流体是湍流型式.11、伯努利方程是一个基于能量守恒定律的流量方程,流体中某一点的液体或气体的所有能量与其它所有点的能量相等.12、能量因素.大多数流体方程基于能量守恒法,使液体或气体的平均速度,压力,以及流体高于给定参考点的高度联系起来. 这种关系由伯努利方程给出. 该方程可以做出一定修改,考虑加入由于摩擦力而引起的能量损耗,以及由泵带来的能量输入.13、流动流体的能量损耗,是由流体和容器壁的摩擦力,和流体与物体的碰撞所引起的. 大多数情况下,这些损耗是无法忽略的. 然而在这些方程用于液体和气体的时候,气体的应用更为复杂,因为事实上气体是可以压缩的.14、流速是在给定时间内流经指定点的流体体积,通常计量为加仑每分钟,立方英尺每分钟,升每分钟,等等. 表格2.3.1给出了流速的转换因子.总体流量是在一段时间液体流动的体积,计量为加仑,立方英尺,升等等.15、连续方程连续方程表明,如果一个系统内的总体流速不随时间变化,那么在系统任何地方的流速都是常数. 从这里我们可以得到以下的方程:16、伯努利方程伯努利方程给出了流体系统中压强,流体速度和高度之间的关系.这个方程公认为伯努利方程(1738). 当应用于图2.3.3(a),可以得到如下的方程:17、这个方程是能量守恒方程,并假设在A和B点之间没有能量损耗. 第一项代表基于压强所储存的能量,第二项代表动能或因为运动而具有的能量,第三项代表势能或由于高度而具有的能量.18、如果每项都乘以质量每单位体积,就可以得到这个能量关系,但因为质量每单位体积在A点和B点是相同的,可以消去. 该方程可以用于流体系统中任何两点. 伯努利方程中使用的压强必须是绝对压强.在图2.3.3(b)中所示的流体系统中,点3的流体速度V可以从方程(2.3.4)推导得出,并且用点2作为参考线,如下所示.19、出口的点3具有动态压强,但除了1个大气压以外没有静态压强,因此,点1和点3的绝对压强都等于1个大气压,而且二者比重相同. 这就表示了流出系统的液体流速直接正比于在参考值以上液体高度的平方根.。
专业英语阅读课文翻译

Unit1 chemistry and chemists一、英译汉:化学是什么呢?给化学下个定义,就是对物质及其性质的研究。
给物质下个定义,就是所有有重量、占据一定空间体积的东西。
这些定义是能让人接受的,但是并没有解释一个人为什么要懂化学。
这个问题的答案是,我们生活的世界是化学的世界。
你自己的身体就是一个复杂的化学工厂:用化学过程使你所吃的食物和呼吸的空气变化到骨骼、肌肉、血液和组织,甚至你每天所用的能量。
如果疾病阻止这些过程的某个部分发挥正常功能,医生就会开一些化学类的药物,这些药物要么是从自然界中分离的,要么是化学家从化学实验室合成的。
如果没有化学,我们的生活将无法想象,因为化学就在我们身边发挥作用。
想想如果没有化学生活将会变成什么样子——我们家里将没有塑料、电、用来保护的涂料。
将没有合成纤维使我们有衣穿,没有化肥使我们有足够的食物吃。
因为汽车、轮船和飞机没有金属、橡胶和燃料,我们也不能旅行。
没有电话、收音机、电视和计算机,我们的生活将发生很大变化,所有这些产品都靠化学来生产其中的部件。
因为没有药物治疗疾病,人的寿命也将会变短。
化学处在科学研究的前沿,我们喜欢这个迅速发展的技术,你可以为此做出自己的贡献。
看看最近的几个科技研究:计算机图形学能使我们预知小分子能否与大分子结合或反应,这个足以给治疗疾病的药物带来场新的革命;化学家也正在研究运用化学试剂来获得太阳能并使海水淡化的方法;因为金属易腐蚀,化学家也正在研究使用新型的陶瓷材料代替金属的可能性。
在生物技术帮助下,我们发展了食品的新来源、产生燃料的新方法、以及新的丝绸补救方法。
因为计算机帮助我们预知和解释从试管得到的结果,结果的速度、准确性、质量得到迅速提高,所有这些给产品发展带来益处。
化学家应该给我们提供新材料伴随我们进入新世纪。
从事这项学科,你能为社会做出积极的贡献。
这儿有一些选择化学作为职业的好理由。
首先,如果你对化学有兴趣,你可以有机会给新技术的发展做出贡献。
新视野大学英语第三版读写教程1课文翻译

one孔子是中国历史上著名的思想家、教育家,是儒家学派(Confucianism)的创始人,被尊称为古代的"圣人"(sage)。
Confucius was a great thinker and educator in Chinese history.He was the founder of Confucianism and was respectfully referred to as an ancient"sage".他的言论和生平活动记录在《论语》(The Analects)一书中。
His words and life story were recorded in The Analects.《论语》是中国古代文化的经典著作,对后来历代的思想家、文学家、政治家产生了很大影响。
An enduring classic of ancient Chinese culture,The Analects has had a great influence on the thin kers,writers,and statesmen that came after Confucius.不研究《论语》,就不能真正把握中国几千年的传统文化。
Without studying this book,one could hardly truly understand the thousands-of-years'traditional Chinese culture.孔子的很多思想,尤其是其教育思想,对中国社会产生了深远的影响。
Much of Confucius'thought,especially his thought on education,has had a profound influence o n Chinese society.在21世纪的今天,孔子的学说不仅受到中国人的重视,而且也越来越受到整个国际社会的重视。
自动化专业外语课本翻译
A summary of Eq.(1-1A-1), (11A-2) and (1-1A-4) for the three forms of passive circuit elements is givenentional current flow is used; hence the current in each element is shown in the direction of decreasing voltage.
Using the equations for the voltage drops in a resistor and inductor, we have
di L Ri e dt
Eq.(1-1A-6) is the differential equation for the current in the circuit.
u
dq C
where the capacitance C is the proportionality constant relating voltage and charge.
By definition, current equals the rate of change of charge with time and is expressed as i=dq/dt.
Symbolic representations of voltage and current sources are shown in Fig.1-1A-2.
A common method of analyzing an electrical network is mesh or loop analysis.
Thus an increment of charge dq is equal to the current multiplied by the corresponding time increment, or dq=idt. Eq.(1-1A-3) may then be written as
自动化专业英语第三版王树青第一章翻译

自动化专业英语第三版1.1 介绍过程控制1.近年来,对过程系统的性能改善需求变得越来越困难. 更为激烈的竞争,更加严格的环境和安全规范,以及快速变化的经济条件都是加强工厂产品质量规范的关键因素2.更为复杂的情况是,由于现代制造业朝着规模更大,集成度更高的方向发展,而使不同的加工环节之间的协调能力更低, 所以加工过程更难控制.在这种工厂中,要想让一个生产环节出现的问题不对其相连的另一个生产环节产生影响,几乎是不可能的.3.近年来,考虑到工业制造逐渐加强的安全、高效需求,过程控制这个课题变得越来越受重视.实际上,对于大多数现代工业,要满足安全、高效,产品质量的要求,没有控制系统是不可能的.1.1.1说明性的例子1.图1.1.1 所示的连续加热搅拌器可以作为过程控制的典型例子.输入液态流体的质量流量率为w,温度为Ti. 槽内成分搅拌均匀,并且用电加热器,功率为Q瓦特.2.假设输入和输出流量率是相等的,并且液体密度保持恒定,也就是说温度变化足够小,密度对温度的影响可以忽略不计. 在这些条件下,槽内液体的体积保持恒定3.加热搅拌器的控制目标是保持输出温度T在一个恒定参考值TR上.参考值在控制术语中指的是给定值. 下面我们考虑两个问题.把加热搅拌器内的液体从输入温度Ti加热到输出温度TR,需要多少热量?1.要确定达到设计运行条件下的热量需求,我们需要写下槽内液体的稳定能量平衡式.在写平衡式之前,假设槽内是完美搅拌的,同时忽略热损耗.2.在这些条件下,槽内成分的温度保持一致,因此,输出温度等于槽内液体温度..3.分别表示Ti, T, w, 和 QC 是液体的比热. 我们假设C是恒定的. 在设计条件下,将其代入方程(1),1.方程(2)是加热器的设计方程.如果我们的假设是正确的,同时输入流量和输入温度等于他们的标定值,那么有方程(2)给出的输入热量将使输出温度保持在期望值TR.但是,如果给定条件变化,会产生什么样的结果呢?这给我们带来第二个问题:2.问题2. 假设输入温度Ti随时间变化. 我们如何确保温度T保持或靠近给定值TR?最为一个特殊的例子,假设Ti增加到一个大于的值. 如果Q保持在标定值上恒定,我们可以得到输出温度将增加,因此T>TR.为应付这种情况,有一些可能的策略控制出口温度T方法1。
自动化英语翻译

B Artificial Neural Network
PART 3 Computer Control Technology
UNIT 1 A Computer Structure and Function 42
《自动化专业英语教程》-王宏文-全文翻译
PART 1 Electrical and Electronic Engineering Basics
UNIT 1 A Electrical Networks — — — — — — — — — — — — 3
B Three-phase Circuits
分析电网络的一般方法是网孔分析法或回路分析法。应用于此方法的基本定律是基尔霍夫第一定律,基尔霍夫第一定律指出:一个闭合回路中的电压代数和为0,换句话说,任一闭合回路中的电压升等于电压降。网孔分析指的是:假设有一个电流——即所谓的回路电流——流过电路中的每一个回 路,求每一个回路电压降的代数和,并令其为零。
UNIT 2 A Fundamental Issues in Networked Control Systems
B Stability of NCSs with Network-induced Delay
UNIT 3 A Fundamentals of the Database System
B Fundamentals of Computer and Networks 43
UNIT 2 A Interfaces to External Signals and Devices 44
B The Applications of Computers 46
药学英语课文翻译
药学英语课文翻译Unit1药品依据他们的产品或来源药物可以被分为三种:Ⅰ、全分解Ⅱ、自然产物和Ⅲ、由局部分解产物〔半分解产物〕本书的重点是关于最重要化合物Ⅰ和Ⅲ——这类药物分解。
但是,这并不意味自然产物和其他的药物就不重要。
它们可以被用作有价值的先导化合物,并且它们通常被用作起始原料或作为重要分解产物的中间体。
分解而愈加经济的。
在过去的几年里发酵,即微生物工程,曾经变得极端重要。
经过现代技术和基因的选择结果,招致了微生物高突变体演化的发生,发酵曾经变成了对物质普遍围的选择方式。
真核细胞〔酵母和霉菌〕和原核细胞〔单细菌细胞和放线菌〕都被用作微生物。
以下为可取得的消费方式:1.细胞原料〔单细胞蛋白质〕2.酶3.初级的降解产物〔初级酶代谢物〕4.次级的降解产物〔次级的代谢物〕在次级代谢物中,必先提起的是抗生素,以下五种药代表了每年世界范围内价值170亿美元的药物:青霉素,头孢菌素,四环素,红霉素,氨基糖苷类。
大约有5000种抗生素曾经从微生物中分别出来了,但在这些中仅有那些少于100种用于治疗运用。
但是,一定知道,那些衍生物经过局部分解被改良用于治疗。
在过去十年中,单单从β-内酰胺半分解的就有五万种药物。
发酵在容积大于400m3的不锈钠发酵罐中停止,防止了微生物噬菌体的污染等等,整个进程必需在无菌条件下停止。
〔倒数第五段末尾〕少量运用的试剂不只仅是酸〔盐酸、硫酸、硝酸、醋酸〕,还有无机和无机碱〔氢氧化钠、氢氧化钾、碳酸钾、重碳酸钾、铵碱、三乙胺、吡啶〕。
还有辅佐化学物质包括活性炭和催化剂。
一切这些补充的化学物质〔比如中间体〕在最终产物中能够是杂志的来源。
在1969年,世界卫生组织出版了关于〝药品平安质量维护〞的论述。
目录2是有关〝药品赔偿和平安维护质量的规则〞〔世界卫生组织,1969年第418号技术报告,目录2;1975年第567号目录1A〕这同时变为众所周知的〝药质量量管理规范〞或GMP规范,并且这些规则在如今药品消费中也应遵守。
自动化专业英语(王树青)3.4

⾃动化专业英语(王树青)3.43.4.1 IntroductionModel (Based) Predictive Control (MBPC or MPC), is not a specific control strategy but more of a very ample range of control methods developed around certain common ideas. These design methods lead to linear controllers which have practically the same structure and present adequate degrees of freedom. The ideas appearing in greater or lesser degree in all the predictive control family are basically:.Explicit use of a model to predict the process output at future time instants (horizon)..Calculation of a control sequence minimizing a certain objective function..Receding strategy, so that at each instant the horizon is displaced towards the future, which involves the application of the first control signal of the sequence at each step.The various MPC algorithms (also called long-range Predictive Control or LRPC) only differ amongst themselves in the model used to represent the process and the noises and the cost function to be minimized. This type of control is of an open nature within which many works have been developed, being widely received by the academic world and by industry. There are many applications of predictive control successfully in use at the present time, not only in the process industry but also applications to the control of a diversity of processes ranging from robot manipulators to clinical anesthesia. Applications in the cement industry, drying towers and in robot arms, are described, whilst developments for distillation columns, PVC plants, steam generators or servos are presented. The good performance of these applications shows the capacity of the MPC to achieve highly efficient control systems able to operate during long periods of time with hardly any intervention。
第三版,化学工业出版社。-自动化专业外语翻译,王树青编。第二章第二节翻译
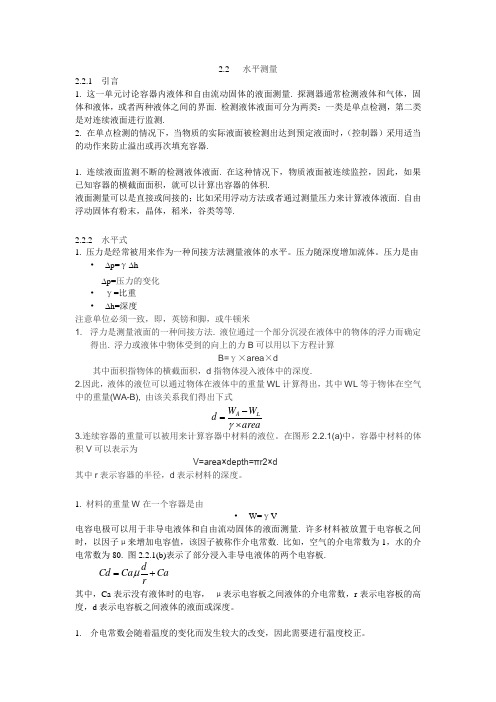
2.2 水平测量2.2.1 引言1.这一单元讨论容器内液体和自由流动固体的液面测量. 探测器通常检测液体和气体,固体和液体,或者两种液体之间的界面. 检测液体液面可分为两类:一类是单点检测,第二类是对连续液面进行监测.2.在单点检测的情况下,当物质的实际液面被检测出达到预定液面时,(控制器)采用适当的动作来防止溢出或再次填充容器.1.连续液面监测不断的检测液体液面. 在这种情况下,物质液面被连续监控,因此,如果已知容器的横截面面积,就可以计算出容器的体积.液面测量可以是直接或间接的;比如采用浮动方法或者通过测量压力来计算液体液面. 自由浮动固体有粉末,晶体,稻米,谷类等等.2.2.2 水平式1. 压力是经常被用来作为一种间接方法测量液体的水平。
压力随深度增加流体。
压力是由•∆p=γ∆h∆p=压力的变化•γ=比重•∆h=深度注意单位必须一致,即,英镑和脚,或牛顿米1. 浮力是测量液面的一种间接方法. 液位通过一个部分沉浸在液体中的物体的浮力而确定得出. 浮力或液体中物体受到的向上的力B可以用以下方程计算B=γ×area×d其中面积指物体的横截面积,d指物体浸入液体中的深度.2.因此,液体的液位可以通过物体在液体中的重量WL计算得出,其中WL等于物体在空气中的重量(WA-B), 由该关系我们得出下式3.2.2.1(a)中,容器中材料的体积V可以表示为V=area×depth=πr2×d其中r表示容器的半径,d表示材料的深度。
1.材料的重量W在一个容器是由•W=γV电容电极可以用于非导电液体和自由流动固体的液面测量. 许多材料被放置于电容板之间时,以因子μ来增加电容值,该因子被称作介电常数. 比如,空气的介电常数为1,水的介.其中,Ca表示没有液体时的电容,μ表示电容板之间液体的介电常数,r表示电容板的高度,d表示电容板之间液体的液面或深度。
1.介电常数会随着温度的变化而发生较大的改变,因此需要进行温度校正。
自动化专业英语第三版王树青unit1翻译

第1章工业过程控制原理近年来,工艺装置的性能要求已变得越来越难以满足。
更激烈的竞争,更加严格的环保和安全法规和瞬息万变的经济环境已经在收紧厂的产品质量标准的关键因素。
更复杂的是,现代化的进程变得更加难以操作,因为更大,更高度集成的植物更小的浪涌能力之间的各种处理单元的趋势。
这些植物给运营商很少有机会能防止翻倒从一台设备传输到其他互联单位。
鉴于放置在安全的越来越重视。
高效的工厂运营,这是很自然的主题,过程控制,在最近几年变得越来越重要。
事实上,在没有过程控制中,就成了不能够操作最现代化过程安全,有益,同时满足植物的质量标准。
1.1.1举例说明作为一个引进的过程控制。
考虑在图所示的连续搅拌槽加热器。
1。
1。
1的进气口的液体流具有的质量流量w和温度T。
搅拌罐内容,并提供问答瓦的电加热器加热。
据推测,在入口和出口的流率是相同的,液体密度p保持恒定的,即是在温度变化足够小,可以忽略不计的温度依赖性的p。
在这些条件下,液体在槽中的体积V保持恒定。
搅拌罐的加热器的控制目标是保持的出口温度T在恒定的参考值TR。
的基准值被称为对照术语作为设定点。
接下来,我们考虑两个问题。
问题1。
多少热量必须被供给到搅拌槽加热器加热的液体从入口温度T,的出口温度TR?要确定所需的热量输入,为设计工况条件下,我们需要写一个稳态能量平衡的液体在槽中。
在写这种平衡,它假定罐被完全混合,听到的损失是可以忽略不计。
在这些条件下有制作人:中国石油大学(华东)信控学院xueyue内的排名的内容是没有温度梯度,因此,出口温度是罐中的液体的温度相等。
甲稳态能量平衡罐表明添加的热等于焓变化之间在入口和出口流:Q = WC(T-Ti)的(1)其中,Ti的Tw和Q表示体的Tw和Q的额定稳态设计值。
和C是比热的液体。
我们假设,C为常数。
在设计条件下,T = TR(设定点)。
这种替代式。
(1)给出的表达式{或标称输入热量Q = WC(TR-T)(2)方程(2)是对听者的设计方程。
自动化专业英语第三版(王树青) unit 5 Controller Tuning 翻译

控制器整定1。
某化工厂中经常遇到的过程控制系统是什么?2。
控制系统在安装后,必须调整什么?3。
什么样的方法经常被用来调整控制器吗?4。
能否请您给的典型方法和步骤?后安装一个控制系统控制器的设置,通常必须进行调整,直到控制系统的性能被认为是令人满意的。
此活动被称为控制器的控制器整定或现场调谐。
由于控制器整定的操作通常是通过试验和错误的,它可以是相当乏味和费时的。
因此,它是希望的令人满意的控制器设置有良好的初步估计。
一个良好的第一猜测可能是类似的控制回路的经验。
或者,如果一个过程模型或频率响应的数据是可用的,一些特殊的设计方法可以被利用来计算控制器设置。
然而,现场调整可能仍然需要精神符控制器,特别是如果可用的进程信息是不完整的,或者不是很准确选择控制器的类型(P,PI.etc)的设置和选择的一般准则是经常遇到的过程变量:流量,液位。
气体的压力,温度,和组合物。
该指导方针将讨论的过程模型是不可用的情况下是有用的。
然而,他们应谨慎使用,因为异常发生类似的准则是选择初始控制器设置为启动一个新的工厂。
流量控制流量和液体的压力控制回路,其特征在于由快速响应(在顺序秒),与基本上没有时间延迟的pfo.ess动力学由于可压缩性(在气流中)或惯性的影响(在液体中)。
如果使用了气动工具的传感器和信号传输线可能会带来显着的动态滞后。
流量控制系统中的干扰往往是频繁的幅度很大,但一般不会干扰因素是高频噪声(定期或随机)由于流湍流,阀的变化,泵的振动。
PI流量控制器通常使用与中间值的控制器增益Kc。
存在的重复高频率的噪音排除使用衍生诉讼。
液位一个典型的非自调节液位过程中已经讨论过,因为它的集成性。
一个datively高增益控制器可用于控制系统的不稳定性的关注不大。
事实上,控制器增益的增加往往会带来系统中的稳定性增加。
而低的控制器的增益可以增加振荡积分控制动作的程度,通常使用牙钻是不必要的,如果在液体中的电平(±5%)的小的偏移量可以容忍的微分作用还没有电平控制中通常采用的,因为水平的测量常常包含产生的噪声,plashing和动荡的液体进入储罐。
第三版,化学工业出版社。自动化专业外语翻译,王树青编。第二章第一节翻译

2.1 压力测量2.1.1 引言1.压力是气体和液体由于自身重力而产生的力,比如作用于地表面的大气压力,作用于容器底部和容器壁的液体压力.压力单位是作用于给定面积的力的度量. 通常,用英制单位表示为磅每英寸(psi),有时是为磅每英尺(psf),或者用公制单位表示为帕斯卡(Pa 或kPa). (压力在物理学上称为压强).2.1.2压力测量1.这里有六种应用于压力(压强)测量的术语. 他们表示如下:1.完全真空–零压力或没有压力,比如外太空.1.真空是介于完全真空和普通大气压之间的压力测量. (相对真空状态)1.大气压指空气由于自身重力作用于地球表面的压力,通常表示为海平面大气压,14.7 psi 或101.36 kPa. 但是,它取决于空气条件. 海平面之上压力降低,在海拔上升到5000英尺下,压力降低到大约12.2 psi (84.122 kPa).1.绝对压是相对于真空压测量到的压力,表示为磅每平方英寸(psia).1.表压是相对于大气压测量到的压力,通常表示为磅每平方英寸(psig). 图2.1.1 (a) 给出了大气压,表压和绝压之间的图形关系.差压是相对于另一个压力测量得到的压力,表示为两个数值的差值. 可以表示压力或流体系统中两点的压力差,表示为delta p 或∆p. 图2.1.1(b) 表示了两种情况,隔板两端的差压和一个流体系统两点的差2.1.3 压力仪表1.量表是一类主要的压力传感器,测量相对于大气压的压力. 通常,仪表传感器是一些随着压力施加而改变形状的设备. 这些设备包括膜片、膜盒和波纹管,波登管.1.膜片包含一个薄层或薄膜,支撑在一个刚性框架上,如图2.1.2(a). 在表压测量时,压力可以施加在膜的一边,在差压或绝压测量时,压力可以施加在膜的两边.2.测量用的膜可以使用很多种材料,用于低压设备的橡胶和塑料,用于中压的硅,用于高压的不锈钢.3.当压力施加于膜片上,膜会变形或变成轻微曲面形状. 这种运动状态可以用应变仪,压电仪器或变电容仪器测量(老式仪器包括磁性设备和碳堆设备).4.以上测量设备使用传感器将形变转化成电信号. 在这些设备中,微电硅膜片是最常用的用于产生电信号的工业压力传感器.1.硅膜片使用硅材料,它是一种半导体材料. 当硅膜背面蚀刻之后,使得应变电阻片和电子放大器集成到硅结构的顶部表面上. 这些设备集成了温度补偿压电应变仪和放大器,用以输出高电压(5V FSD[满额电压或最大偏移])2.这些设备体积小,精度高,可靠性强,耐久时间长,并且不受很多化学物质的影响. 商业用的表压,差压和绝压传感器测量范围可到200psi(1.5MPa). 使用不锈钢膜片,可将这个范围扩大到100,000psi(700MPa).1.图2.1.3(a)给出了用于微型压力传感器的3种硅芯片结构的横截面图,表压,绝压和差压.芯片(模具)被密封到塑料壳中(大约厚度0.2,直径0.6). 装配成的仪表在图2.1.3(b)中给出. 2.微电子硅膜片压力传感器可用于血压监视器和许多工业应用中,并且大规模应用于自动压力传感测量,比如,各种气体压力,大气压,油压,传输流体,中断流体,液压转动装置,轮胎压力等方面的测量.1.膜盒是由两个膜片紧密连接,如图2.1.2(b). 压力可以作用于膜片之间,使膜片分开来测量表压. 膜片的扩张可以结合一个机械指示装置。
自动化专业英语原文和翻译

自动化专业英语原文和翻译Title: Original and Translation of Professional English in AutomationIntroduction:In the field of automation, understanding and mastering professional English is essential for communication, research, and development. This article will discuss the importance of original and translated professional English in automation and provide detailed explanations of key terms and concepts.1. Original Professional English:1.1 Understanding technical terms: Original professional English in automation often includes technical terms that are specific to the field. It is important to understand the meaning of these terms in order to effectively communicate and collaborate with others in the industry.1.2 Reading research papers: Many research papers in automation are written in English, so it is crucial to be able to read and understand them in order to stay up-to-date with the latest developments in the field.1.3 Writing reports and documentation: In automation, professionals are often required to write reports, documentation, and technical manuals in English. Having a strong grasp of original professional English is necessary for effectively conveying information to colleagues and clients.2. Translation of Professional English:2.1 Accuracy in translation: When translating professional English in automation, it is crucial to ensure accuracy in order to avoid misunderstandings and errors. Professional translators with expertise in the field are often needed to provide accurate translations.2.2 Translating technical documents: Translating technical documents, such as user manuals and specifications, requires a deep understanding of both the technical contentand the nuances of the English language. Translators must be able to convey complex information clearly and accurately.2.3 Localization: In addition to translation, localization is often necessary in order to adapt professional English in automation to different cultural and linguistic contexts. This involves not only translating text, but also adapting it to suit the preferences and needs of the target audience.3. Importance of Professional English in Automation:3.1 Global communication: Automation is a global industry, and professionals must be able to communicate effectively with colleagues, clients, and partners from around the world. Professional English is often the common language used in these interactions.3.2 Career advancement: Proficiency in professional English can open up opportunities for career advancement in automation. Being able to read, write, and speak English fluently can give professionals a competitive edge in the industry.3.3 Access to resources: Many resources, such as research papers, technical manuals, and online courses, are only available in English. Proficiency in professional English allows professionals in automation to access these resources and stay informed about the latest developments in the field.4. Challenges in Professional English in Automation:4.1 Technical complexity: Professional English in automation can be highly technical and complex, making it challenging for non-native English speakers to understand and communicate effectively.4.2 Terminology consistency: The terminology used in automation can vary between different countries and regions, leading to confusion and misunderstandings. Consistent use of terminology is crucial for effective communication in the field.4.3 Cultural differences: Cultural differences can also impact the use of professional English in automation. Translators and professionals must be aware of cultural nuances in order to accurately convey information and avoid misunderstandings.5. Tips for Improving Professional English in Automation:5.1 Practice reading and writing: Reading research papers, technical manuals, and other professional documents in English can help improve proficiency in professional English in automation.5.2 Attend workshops and training: Workshops and training programs focused on professional English in automation can help professionals improve their language skills and stay up-to-date with industry trends.5.3 Seek feedback: Asking for feedback from colleagues, mentors, and language experts can help professionals identify areas for improvement and enhance their proficiency in professional English.Conclusion:In conclusion, mastering professional English in automation is essential for communication, research, and development in the field. Understanding the importance of original and translated professional English, as well as the challenges and tips for improvement, can help professionals in automation enhance their language skills and succeed in their careers.。
自动化专业外语第三版部分翻译
第1章工业过程控制原理问题1.多少热量必须被供应到搅拌槽加热器加热的液体从入口温度T,的出口温度TR?要确定所需的热量输入,为设计工况条件下,我们需要写一个稳态能量平衡的液体在槽中.在写这种平衡,它假定槽被完全混合,听到的损失是可以忽略不计.在这些条件下有内的排名的内容是没有温度梯度,因此,出口温度与槽中的液体的温度相等.一个稳态能量平衡槽明确添加的热等于焓变化之间在入口和出口流:Q=WC〔T-Ti〕的〔1.1.1〕其中,Ti的Tw和Q表示体的Tw和Q的额定稳态设计值.和C是比热的液体.我们假设,C为常数.在设计条件下,T=TR〔设定点〕.这种替代式.〔1.1.1〕给出的表达式或标称输入热量Q=WC〔TR-T〕〔1.1.2〕等式〔1.1.2〕是对听者的设计等式.如果我们的假设是正确的,如果在入口流率和入口温度等于其标准值,然后由方程给出的热输入.〔2〕的出口温度保持在所需的值,TR.但是,如果条件发生变化吗?这给我们带来了第二个问题:问题2.假设入口温度Ti随时间的变化.我们怎样才能保证T保持在设定点附近TR吗?作为一个具体的例子.承当的Ti提高到一个新的值大于Ti平均值,如果Q是保持不变的人的名义Q值,我们知道,出口温度将增加,使T>TR.〔cf.Eq.〔1.1.1〕〕.为了对付这种情况,也有一些可能的策略用于控制退出温度T.T和调Q.的一种方式控制T,尽管这件T干扰.调Q根据T.直观地测量,如果T是太高,我们应该减少Q; T是太低了,我们应加大控制策略往往会问:这移动Ţ朝向的设定点〔TR〕和可以在许多不同的方式实施.例如,工厂操作员可以观察测得的温度,并比拟测量值到TR.然后,操作员会以适当的方式变化q.这将是一个手动控制的应用.但是,它可能会更方便,更经济,有这个简单的控制任务的电子设备,而不是一个人,那就是,利用自动控制自动执行.方法2.测量Ti平均值,调整Q:相比于方法l的替代,我们可以测量变量T和相应的调整Q.因此,如果Ti大于Ti平均值,我们将减少Q;为Ti平均值<Ti,我们将设置Q>Q的平均值.1.2.2 效果反响稳定性1. 稳定性是描述系统是否能够跟踪输入命令或是否有用的概念2. 非严格地,如果一个系统的输出失去了控制,我们就说它是不稳定的3. 为了研究反响对稳定性的影响,我们可以再次观察等式〔1〕.如果GH=-1〔称为负一〕,对于任何输入,系统的输出都是无穷大,这样的系统是不稳定的4. 因此,我们说反响可以使原来稳定的系统变得不稳定5. 当然,反响是一柄双刃剑,当使用不当时,将会产生坏的作用6. 然而需要指出的是,我们在这里只针对静态情况,而通常GH=-1不是系统不稳定的唯一条件.可以证明,参加反响的好处之一是能够使不稳定的系统稳定.我们假设图所示的反响系统是不稳定的,因为GH=-1.如果我们引入另一反响环,其负反响增益是F,如以下图,系统总的输入/输出关系是1.很明显,尽管G和H使内环反响系统不稳定,因为GH=-1,而如果正确选择外环的反响增益F,系统总体上能够是稳定的.2.在实践中,GH是频率的函数,并且闭环系统的稳定性条件依赖于GH的幅值和相位.结论是反响能够改良系统的稳定性,但如果使用不当,也有可能破坏稳定性.1.2.3. 反响对灵敏度的影响1.控制系统中对灵敏度的考虑是非常重要的.由于所有的物理元素都有随环境和时间变化的特性,在系统的整个运行过程中,我们不可能把控制系统的参数当作完全静态的.2.例如,马达的线圈电阻会随着马达温度的升高而变化.第1章中的电子打字机在第一次开机时有时会运行不正常,因为系统参数在预热期间发生变化.3.这种现象有时被称为 "早困〞.大多数复印机都有预热时间,在初次打开后运行会闭锁.1.总的来说,一个好的控制系统应当对参数的变化很不灵敏,而对输入命令的响应很灵敏.我们来研究对参数变化的灵敏度,反响将会产生何种影响.在图1.2.1中,我们考虑G是变化的增益参数.对于G的变化,系统的总的增益灵敏度M定义为M表示由G的微小变化量偏G造成的M的微小变化量.应用〔1〕式,灵敏度函数可以写成GH是正的常数,在系统保持稳定的前提下,灵敏度函数的幅值可以通过增大GH变得任意小.很明显,在开环系统中,系统的增益对G来说是一比一的形式〔即SMG =1〕.2.我们再次提醒,在实践中,GH是频率的函数,在某些频率X围内,1+GH的幅值有可能小于1,这使得在某些情况下,反响对参数灵敏度是有害的.3.通常,反响系统增益对参数的灵敏度取决于参数的位置.读者可以得到图中由于H的变化而造成的灵敏度.1.但是,最初的设计极少能够满足所有目标,通常情况下需要对方法的某些方面做一些修改.基于对最初设计缺陷的理解,有可能必须改变控制的硬件.例如,有可能必须要增加"工作X围〞,象执行器的最大动力水平,或增加额外的传感器.1.另一方面,〔我们〕有可能发现最初使用的设计方法是不恰当的.举一个例子,基于连续时间控制的设计方案打算用数字元件来逼近实现之后〔我们〕发现更好的方法,采用离散时间设计方案,可以直接用数字元件实现2.做出正确的调整之后,在设计过程中相应的步骤还需要重复很屡次,直到达到理想的目标.1.有时,你必须接受失败:用各种不同的软硬件组合方法进行了重复设计之后,结论却是你不知该如何设计这个系统使其满足需求.2.你只能报告说,尽你最大的知识和能力,要满足性能需求,就必须要在硬件或方法学上有所突破-即还不存在的发明.1.正如你所见到的,对控制算法的选择通常只是整个设计过程的一小局部.经验告诉我们,控制算法不会成为影响整个系统性能的决定性因素2.如果你成功地设计了一个系统〔采用任何方法〕,并使之运行,那么单靠不同的控制算法不能在提高性能和降低本钱上取得较大层次的成功.然而,取得较低级别的改良也是有意义的,是值得追求的.1.除非你熟悉一些标准的设计方案和传统的设计方法,否如此你可能无法应付不熟悉的过程.例如,考虑控制飞机的运行问题,在受到一系列不同约束的条件下使其从一个起点到一个指定目的地,如准许的飞行轨道、可用的燃油、安全等2.〔这类问题的具体实例包括人工驾驶飞机,巡航导弹和遥控飞行器等.毫无疑问,每一个都和其它应用在细节上大不一样〕.尽管大部分的飞行控制问题都已经被解决了,但在思索如何处理一些你事先不知解决方法的问题上仍具有启发性.1.原如此上,飞行控制问题可以被表述成一个通用的优化问题:在数学约束X围内,最小化一个指定的数学性能指标.但在在实践中,这种方法几乎是注定失败的,有很多原因,包括以下方面:强调反响控制是一项重要的技术过程工业.它的主要优点是1.一旦控制变量偏离了设置点,无论源和类型的扰动,就会发生纠正操作.2.它需要对控制过程的最小了解,特别是a 虽然它对控制系统的设计很有用,但是不需要对流程进展建模.3.无所不在的PID控制器既通用又健壮.如果工艺条件改变, 重新调整控制器通常会产生令人满意的控制.反响控制也有一些固有的缺点1.在控制变量发生偏差后才采取纠正措施. 因此,完全控制,控制变量不会偏离设定值在负载或设置点更改时,理论上是不可能的.2.它不提供预测控制行动来补偿或可测量干扰的影响.3.对于具有大量时间常量和/或长时间延迟的进程可能不令人满意. 如果发生大且频繁的扰动,该过程可能会持续处于短暂状态,且永远无法达到所需的稳态.4.在某些应用中,控制变量无法在线测量反响控制是不可行的.情况下,反响控制本身并不令人满意,显著改良控制可以通过增加前馈控制.但使用前馈控制,干扰必须在线测量<或估计>.在这个单位.我们考虑了前馈控制系统的设计和分析.我们首先概述前馈控制和比例控制,这是一种特殊的前馈控制.接下来介绍了.如果一个过程在一系列的条件下操作,可以通过使用一组不同的控制器设置来控制每一个操作条件.或者,可以在控制器设置和描述流程条件的流程变量之间建立关系.这些策略是编程适应的例子.编程适应仅限于应用程序,过程动力学依赖于的、可测量的变量和必要的控制器调整并不是太复杂,通常是适应在结构上是否足够简单,可以用一些模拟和所有数字实现控制器.最受欢迎的编程方式是增益调度,控制器增益调整,从而使开环增益K保持不变.作为一个控制问题的例子,规划的适应已经被提出, 考虑一个直流锅炉.这里的给水经过一系列加热管局部在产生过热蒸汽之前,必须准确控制温度.给水流量对锅炉的稳态和动态性能有显著的影响.例如,图3所示.3.1显示了典型的开环反响流量阶跃变化,最大流量的50%和100%.假设一个经验的一阶加时延模型被选择来近似这个过程.稳态增益,延时,和占主导的时间常数是50%流量的两倍,相当于100%流量的相应值.这个控制问题的解决方案是使PID控制器的设置随w的不同而变化,即整个流量的比例<0 w 1>,以如下方式其中K D是100%流量的控制器设置.请注意,对编程适应的建议在质量上与Cohen和Coon规如此的协调一致,并假设流变化的影响与整个操作的流速率成比例关系. 在这个示例中,可以根据两个不同的条件对流程行为进展分类.在其他问题中,动态响应数据是不可用的,但我们对过程非线性有一定的了解.对于含有强酸和/或强碱的酸碱问题,pH值曲线可能非常非线性,在多个数量级上都有变化.因此,针对pH控制问题开展了特殊的非线性控制器,无论是适应性的还是非适应性的.在这种情况下,过程会随着操作条件的变化而变化,因此需要使用增益调度<KcKp =常量>来维护一致的稳定利润.对于某些类型的自适应控制问题,稳态和动态响应特征的变化可以与控制变量的值有关.例如,在温度控制回路中,过程增益随温度的变化而变化,控制器增益可以被控制变量的函数,温度.反响控制器现在是商业性的,它允许用户将Kc作为错误信号e的分段线性函数,如图3所示.3.2.如果进程获得Kp以的方式变化,那么我们应该改变Kc,以便产品KcKp是常量.这种策略将使开环增益保持不变,从而保持一定的稳定性<假设过程动态不变>直流电机是当今工业中使用最广泛的主要动力之一.多年前,大多数用于控制目的的小型伺服马达都是ac 品种.实际上,交流电动机更难控制,尤其是对位置控制和它们的控制特征是非线性的,这使得分析任务更加困难.直流电机,另一方面,更昂贵,因为刷换向片,变磁力线只适合某些类型的直流电机控制的应用程序.在永磁<PM>远非理想.今天,随着稀土磁铁的开展,可以实现非常高的转矩,单位体积,或质量直流电机以合理的本钱.此外,电刷整流器技术的进步使得这些耐磨部件几乎不需维护的.电力电子的进步使无刷直流电机在高性能控制系统中非常流行.先进的制造技术也产生了无铁转子具有非常低惯性的直流电机,从而实现了非常高的扭矩-惯性比,以与低时不变的性能在计算机外围设备,如磁带驱动器,打印机,磁盘驱动器,文字处理器,以与自动化和机床工业中,为直流电机打开新的应用程序5.2.1直流电机的根本操作原理直流电机根本上是一个扭矩传感器,将电能转换成机械能量.电机轴上的力矩与场通量和电枢电流成正比.如图5所示.2.1载流导体是在a中建立的磁通量Q的磁场,导线位于旋转中心的距离r.开发了转矩之间的关系,流量Q,和当前Ia Tm = KmQia<5.2.1> Tm是电动机转矩<n - m、磅英尺或扭力>,问的磁通量<韦伯夫妇>,ia的电枢电流<安培>,和公里是一个比例常数. 除了图5所示的排列所产生的力矩之外.2.1,当导体在磁场中移动,在其端子上产生电压.这个电压,emf,轴速度成正比,倾向于反对电流.20世纪60年代早期,工业机器人成为了现实,约瑟夫·恩格尔伯格和乔治 Devol 联合成立了一个名为"Unimation〞的机器人公司.Engelberger和Devol并不是第一个梦想机器可以执行的机器在制造不熟练,重复的工作.第一次使用"机器人〞这个词是由捷克斯洛伐克哲学家、剧作家卡雷尔·卡佩克<Karel Capek>扮演r . u<Rossum的通用机器人>."机器人〞一词在捷克意味着"工人〞或"奴隶.这出戏是1922年写的.在Capek的游戏中,Rossum和他的儿子发现了人造原生质的化学配方.原生质构成生命的根底.用他们的化合物,Rossum和他的儿子制造一个机器人.Rossum和他的儿子花了20年的时间把原生质变成了一个机器人.二十年后的ros总和看着他们创造的东西说:"如果我们不能让他比大自然快,那么花20年的时间来做一个男人是荒谬的,你也可以闭嘴.〞年轻的Rossum回到工作中去去除他认为对理想工作者没有必要的器官.年轻的Rossum说:"一个人的感觉是快乐的,玩耍钢琴,喜欢散步,实际上想做很多事情不必要的…但是工作机器不能弹钢琴,不能感到快乐,千万不能做还有很多其他的东西.任何不能直接促进工作进展的事情都应该被消除.半个世纪后,工程师开始建造Rossum的机器人,而不是人工原生质, 但是硅水力学,气,和电动机.那些在1922年被卡佩克所梦想的机器人,它的工作,但是没有感觉,在制造工厂里执行非人类或人类的工作,在世界各地都是可行的. 就像Rossum的儿子认为的那样,现代机器人缺乏感觉和情感.它可以只简单回应"是/否〞问题.现代机器人通常被栓在地板上.它有一只胳膊和一只手.这是又聋又瞎又哑.尽管有各种各样的障碍,现代机器人仍然在不无聊或抱怨的情况下完成分配的任务.机器人不仅仅是另一台自动化机器.自动化开始于工业革命期间,机器完成了以前由人类工人完成的工作.然而,这种机器只能做它设计的具体工作,近年来,人们对为各种各样的科学和工程应用开发人工智能<AI>技术有着浓厚的兴趣.一份全面的调查报告提供了对过程工程中的智能系统的彻底审查,并包含385个参考文献.该领域的过程控制研究主要涉与三个人工智能方法:基于知识的系统、神经网络和模糊逻辑. 6.1.1以知识为根底的系统基于知识的系统<KBS>,也称为专家系统.使用一组"规如此〞对流程操作或其他活动的状态进展逻辑推断的兴趣.一个早期的、高度可见的示X项目"猎鹰计划〞是杜邦公司的合作项目.在1983 - 1987年间,Foxboro和特拉华大学.本研究的目的是开发并应用基于知识的方法,在一种全面的化学工厂,一种油质的酸转换器中进展故障诊断.尽管这个开创性的项目被认为只是局部成功,但它为许多未来的杜邦KBS应用铺平了道路.Stephanopoulos和Han指出,KBS系统的工业应用根本上是这样的关注诊断和监测活动或监视控制.监控应用程序包括以下问题:复杂的控制方案;从极端环境中恢复;以与紧急关闭.他们还描述了一些工业KBS应用程序. Samdani和Fouhy最近的一篇贸易杂志文章概述了KBS在流程工业中的应用.他们报告说,"……杜邦很清楚地从1000个左右的KBS中获得了好处.在同样的问题上,Samdani报告说, "<杜邦>说,还有大约2万个应用领域有待开发.〞。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.5 控制器调谐1.当安装了控制系统之后,通常必须先调整控制器的设置,直到控制系统运行达到满意为止。
这个活动被称为控制器整定,或控制器的现场整定。
由于控制器整定通常都采用反复实验的方法(试差法),整定过程是十分费时的。
因此,我们希望能够初步估计出一个令人满意的控制器设置。
2.首先好的设想可以源于类似控制回路中取得的经验。
换句话说,如果已知过程模型或频率响应数据,就可以采用一些特殊的设计方法来计算控制器设置。
然而,现场整定仍是控制器微调所需要的,尤其是当过程信息不完整或不太准确的时候.1.一般控制回路指导方针1.对一些常见的过程变量: 流速、液位、气压、温度和成分,它们的控制器类型和控制器设置的选择都有通用的指导方针。
2.下面讨论的指导方针对于过程模型未知的情况是有用的. 但是,这些(方针)必须谨慎使用,以防发生意外. 类似的指导方针可用于新型设备启动阶段的控制器初始值设置.1.1流量控制1.流量和液压控制回路的特点是响应快速(秒级),基本上没有时间延迟。
过程的动态特性是由于气流的可压缩性或液体的惯性造成的。
传感器和信号传输线如果采用气动设备,有可能会带来很大的动态滞后(延迟)。
2.流量控制系统中的扰动较为频繁但通常幅值较小。
多数扰动是高频噪声(周期性或随机性),来源于流体紊乱、阀门变化和泵的振动. 通常使用PI流量控制器,控制器增益Kc取中间值。
而不断重复的高频噪声使得微分作用无法使用.1.2液体水平1.(我们)已经讨论过典型的无自衡液位过程。
由于它的积分性质,我们可以采用一个较高增益的控制器,而不用考虑控制系统的不稳定性。
实际上,控制器增益的增大经常会增加系统的稳定性,而低增益则增加系统的振荡程度。
(实际上,增益K越大,系统越快速趋于稳定值,但过大增益会使系统容易变得不稳定,增益K越小,系统振荡时间越长,到达稳态值时间越长)2.积分控制通常是被采用的,但是在允许液位存在小的误差(±5%)的时候,积分部分就不是必须的. 通常在液位控制中,微分控制较少采用,因为液体进入容器时会的飞溅和湍流经常会使液位的测量中包含着噪声。
(I 控制器:消除稳态误差,但I会增加系统振荡(稳定性),D控制器:快速性,减小振荡,但不适用于高频噪声)1.在很多液位控制问题中,盛放液体的容器被用作缓冲罐,以减弱流入液体造成的波动。
如果从容器流出液体的流速被用作操作变量,那么应该采用传统的控制器设置,以避免流出流速产生大而快速的波动。
这种策略称为均匀控制。
2.如果液位控制还涉及到热传递问题,如蒸馏器或蒸发器,那么过程模型和控制器的设计将变得更加复杂。
在这种情况下,一些特殊的控制方法将会更加有效。
1.3气体压力1.气压控制相对液位控制来说更容易一些,除了当气体与液体达到平衡状态时的情况. 气压过程是自调节的:当压力太小时,容器(或管道)就会进入更多的气体,而当压力过大时,会减少进入的气体。
PI控制器通常被采用,并且积分控制部分发挥很小的作用(即,大的积分时间常数)(积分常数越大,积分作用越不明显,这里指主要是P控制,I控制起作用很小)。
2.通常容器体积不大,使气体相对滞留时间很短,而该过程的时间常数较小。
通常不需要微分控制,因为与其它过程操作相比,气体过程响应时间很短。
1.4温度1.要表达温度控制回路的通用指导方针比较困难,因为涉及到热传递的过程和设备差别很大(并且时间标尺不一致)。
例如,对于换热器、蒸馏塔、化学反应器和脱水器,它们的温度控制问题有很大差别。
2.由于时滞和/或多级热容的存在,通常对控制器增益会有一个稳定范围。
常用PID控制器来获得比PI控制器更加快速的响应特性。
1.5组合物1.成分回路的特性通常与温度回路类似,但有几点不同:①噪声测量在成分回路中是更重要的问题。
2. 由分析器导致的时滞可能是一个有意义的因素。
这两个因素限制了微分作用的有效性. 由于成分和温度回路的重要性和控制难度,它们经常是高阶控制策略的实施对象.1.5.2 审判和错误校正1.控制器的现场整定经常根据控制器生产厂家的要求,采用经验试凑法。
典型的PID控制器整定方法总结如下:♠第1步:取消积分和微分作用,设置τ D 值减到最小,τI 值增到最大.♠第2步:设置Kc为一个较小的数(如0.5),并使自动控制发挥作用。
♠第3步:使设定值或负载变化较小的量,逐步增加控制器增益Kc,直到等幅连续循环出现. 术语“连续循环”指的是等幅持续振荡.♠第4步:将Kc减少一倍(1/2).♠第5步:小幅减小τI,直到等幅振荡再次出现. 设置τI 为该值的3倍.♠第6步:加大τ D 直到等幅振荡出现. 设置τ D 等于该值的三分之一1.在第3步中造成连续周期(等幅振荡)的Kc被定义为临界增益,标识为Kcu。
在进行试验过程中,使控制器输出不饱和非常重要。
如果出现了饱和现象,即使Kc >Kcu也会出现持续振荡。
因为临界增益在控制系统的设计和分析中具有关键地位,我们给出了一个更正式的定义:定义:当闭环系统只有比例控制器的情况下,使系统稳定的控制器最大增益值为临界增益Kcu.若已知过程模型,那么Kcu 就能用稳定判据从理论上计算出来。
上述的试差法有许多的不足:①如果要优化Kc, τI 和τ D 需要做很多次试验,而过程动态又非常缓慢,那么经验试凑法将耗费很多时间。
对单一的控制回路测试会很昂贵,因为不能保证产量或产品质量差。
②连续的周期振荡是不能接受的,因为这会使系统过程达到稳定极限。
因此,如果在控制器整定中发生外部扰动或系统过程发生变化,有可能使系统不稳定或带来危险。
(如失控的化学反应器)③这种整定过程不适用于开环不稳定系统,因为这种过程一般在高和低的Kc值下都会不稳定,而在中间某些范围的值下是稳定的.④一些简单的过程没有临界增益(如用一阶或二阶传函建模的无时滞系统).1.5.3 .等幅振荡法1.基于持续振荡的经验试凑法可以看作是著名的连续周期法的变形,连续周期法由Ziegler 和Nichols于1942年发表。
这种经典的方法估计是PID控制器整定最为著名的方法。
2.连续周期法也被称为回路整定法或临界增益法。
第一步是采用上一节描述的方法试验确定Kcu。
产生的持续振荡的周期定义为临界周期Pu。
3.然后采用表1的Z-N整定关系由Kcu和Pu计算出PID控制器的设置。
Z-N整定关系又由经验发展成为四分之一幅值振荡衰减(方法)。
4.这些整定关系在工业中得到了广泛的应用,也为比较不同的控制方案提供一个方便的基础。
然而,本节将要讲述的控制器整定例子表明,Z-N整定要次于其它方法,应该谨慎使用。
1.注意到Z-N设置为比例控制提供了一个重要的安全裕度,因为控制器增益是稳定极限Kcu 的一半。
当加入积分控制时,K c在PI控制中减为0.45 K cu。
而微分控制的加入使PID控制的增益可以增加到0.6 Kcu。
1.对于某些控制回路,因设定值改变而引起的带有1/4衰减比和过大的超调量的振荡是我们所不希望出现的。
因此,更为稳妥的设置好一些,如表2中所示的修正的Z-N设置。
1.尽管Z-N连续周期法被广泛应用,它和经验试凑法一样,存在着同样的不足之处。
然而,连续周期法(等幅振荡法)比经验试凑法耗费时间短,因为它只需要一次经验试凑。
2.我们再次强调,表1、2中的控制器设置应作为第一次的估计值。
这之后还要通过经验试凑法进行微调,特别是当选中了表1的初值之后。
同样,也可以采用本节最后讨论的连续周期自动整定法。
1.5.4. 过程响应曲线法1.在他们著名的文章中,Ziegler 和Nichols 提出了第二种在线整定技术,过程响应曲线法. 这个方法建立与一个单独的实验测试,其中控制器处于人工控制状态. 控制器输出引入一个小的阶跃变化,记录下观测到的过程响应,B(t). (即u(t)引入阶跃变化,观察输出y(t)的阶跃响应)2.这个阶跃响应也被称作过程响应曲线.它的特征由两个参数来体现:S,通过拐点的正切斜率,和θ, 切线与时间轴相交点的时间值.1.图1.5.1所示为两种不同类型的过程响应曲线,在t=0时发生的(输入)阶跃变化. 情况(a)的响应曲线是无界的,指该过程无法自我调节(不稳定过程). 相反地,情况(b)中的假设过程为自我调节过程,因为过程响应曲线可以达到一个新的稳态值. 要注意的是,斜率相交的特性可以用在所有类型的过程响应曲线上.1.表格3给出了过程响应曲线法的Z-N整定关系. S* 表示标准斜率,S*=S/∆p ,其中∆p 是控制器输出p的阶跃变化幅值. 这些整定关系是用经验法,由闭环响应以1/4 衰减比得到. 表格3中的整定关系可以用于可自我调节和非自我调节过程.1.如果过程反应曲线具有典型的S形状如图(b)1.5.1,下面的模型通常提供一个令人满意的适合:1.B’ 是被控变量的测量值,P’是控制器输出变量(操作变量),都表示为偏差变量(即变化值). 要注意这个模型包括了最终控制装置和传感器输出装置的传递函数,也包括过程的传递函数. 模型参数K, τ和θ可以由过程响应曲线得出.1.过程响应曲线法有几个显著的优点:①只需要一次单独的实验测试.②不需要反复试凑.③可以很容易计算出控制器设置参数.然而,同样过程响应曲线法有一些缺点:①实验测试是在开环状态下进行的. 因此,如果在测试过程中,对于大的负载变化没有采取校正的动作,测试结果可能有较大的失真. (大的扰动,但操作变量没有改变,实质上输出变化由扰动决定)②精确确定拐点的斜率是困难的,尤其在测量值受到干扰并且数据记录图表过小的情况下.③这个方法对控制器刻度误差很敏感. 相反地,Z-N方法得到的Kc对于刻度误差并不敏感,因为控制器增益是由实验测试得到的.④表格2和3推荐的参数设置适用于振荡响应(过程),因为这些参数由1/4衰减比例法得到.⑤这个方法不适用于开环振荡响应过程,因为方程(1)中的过程模型会变得非常不准确.1.过程响应曲线的闭环方法被提出来作为第一个缺点的部分补救方法. 在闭环方法中,只有比例控制的情况下,使设定值做阶跃变化而产生过程响应曲线. 之后通过闭环响应采用新的方法来计算出式(1)的模型参数. 闭环响应曲线法的一个主要缺点是模型参数计算比标准开环方法要复杂得多.。