结球叶菜收获机械关键技术与装备研究现状
结球甘蓝收获机械研究现状分析

5 ・ 8
现 代 化农 业
2 1 第 6期 ( 0 2年 总第 3 5 ) 9期
结 球 甘 蓝收 获 机 械 研 究 现 状 分析
周 成 。 陈海 涛 李丽 霞 ,
(. 1 东北 农 业 大 学 工 程 学 院 , 尔 滨 10 3 ;. 哈 50 0 2 黑龙 江省 农 垦科 学 院 农 业 工程 研 究 所 )
通讯作者 : 陈海 涛 ( 9 2 ) 男 , 龙 江 绥 棱 人 , 授 , 士 生 导 师 , 1 6一 , 黑 教 博 主要 研 究 方 向 为 现 代 农 业 装 备 及 生 物 质 材 料 。
5 作 业 速 度 的 合 理 运 用
综 合 以上分 析 , 为保证 播种 质量 , 定要在 作业 中合 理 运 用作 业 速度 , 一 以确 保 播种 的播 量 、 深 和 匀度 , 播
7 m/ k h。
b 调 试播 种机 时 , . 一定要 在合 理 的作业 速度 下进 行 , 一但 调试 好 , 要保 持在 该速 度下恒 速 作业 。 就
C 转 移到新 地 块作业 时 , . 由于 整地 条件 、 打滑 系数 的 的不 同 , 需要 重新 进行 调试 。
( 05 0 )
1 2 瑞 士 的甘蓝 收获 机械 .
瑞士 的 B etc i OB a rsh— F RO公 司研制 的 T 2 0 K一0 0型甘 蓝收 获机 可一次 收 获两行 , 机为 牵 引式 ,带有 甘 该
收 稿 日期 : O 11 — 8 2 l - 22
作 者 简 介 : 成 (9 3)男 , 龙 江 望 奎 人 , 周 1 7一 , 黑 副研 究 员 , 读 博 士 , 要 研 究 方 向 为 现 代 农 业 装 备 。 在 主
我国蔬菜嫁接苗生产装备的利用现状
我国蔬菜嫁接苗生产装备的利用现状随着我国设施栽培面积的迅猛增加,为克服连作障碍,瓜类蔬菜(黄瓜、西瓜和甜瓜等)与茄类蔬菜(茄子、番茄和辣椒等)嫁接育苗比重逐步提高,近年涌现出一批大型规模化蔬菜嫁接苗生产基地,如山东省济南伟丽种业有限公司年产嫁接苗2000万株、山东省寿光市新世纪种苗有限公司年产嫁接苗1200万株、武汉维尔福种苗有限公司年产嫁接苗500万株。
但是,我国嫁接苗生产主要以人工作业为主,存在嫁接生产率低、作业质量不稳定、人员管理困难等一系列问题,采用工厂化自动嫁接装备成为一种发展趋势。
本文在介绍嫁接苗生产模式、工厂化嫁接苗生产装备系统构成和我国工厂化自动嫁接装备应用现状的基础上,分析了存在的问题,提出了我国嫁接生产装备的发展方向。
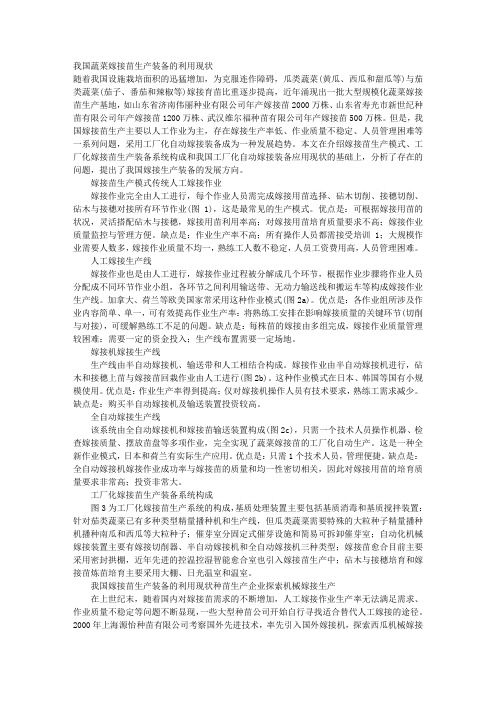
嫁接苗生产模式传统人工嫁接作业嫁接作业完全由人工进行,每个作业人员需完成嫁接用苗选择、砧木切削、接穗切削、砧木与接穗对接所有环节作业(图1),这是最常见的生产模式。
优点是:可根据嫁接用苗的状况,灵活搭配砧木与接穗,嫁接用苗利用率高;对嫁接用苗培育质量要求不高;嫁接作业质量监控与管理方便。
缺点是:作业生产率不高;所有操作人员都需接受培训1;大规模作业需要人数多,嫁接作业质量不均一,熟练工人数不稳定,人员工资费用高,人员管理困难。
人工嫁接生产线嫁接作业也是由人工进行,嫁接作业过程被分解成几个环节,根据作业步骤将作业人员分配成不同环节作业小组,各环节之间利用输送带、无动力输送线和搬运车等构成嫁接作业生产线。
加拿大、荷兰等欧美国家常采用这种作业模式(图2a)。
优点是:各作业组所涉及作业内容简单、单一,可有效提高作业生产率:将熟练工安排在影响嫁接质量的关键环节(切削与对接),可缓解熟练工不足的问题。
缺点是:每株苗的嫁接由多组完成,嫁接作业质量管理较困难:需要一定的资金投入;生产线布置需要一定场地。
嫁接机嫁接生产线生产线由半自动嫁接机、输送带和人工相结合构成。
嫁接作业由半自动嫁接机进行,砧木和接穗上苗与嫁接苗回栽作业由人工进行(图2b)。
蔬菜机械化收获技术及其发展!
蔬菜机械化收获技术及其发展!一、本文概述技术背景与意义:我们将阐述蔬菜机械化收获技术的研究背景,包括全球蔬菜产业的发展态势、人工收获面临的挑战以及机械化收获对于实现高效、精准、绿色农业的迫切需求。
通过剖析其社会经济价值与生态效益,明确该技术研究与推广的战略意义。
技术现状与设备类型:接着,将对当前国内外蔬菜机械化收获技术的发展水平进行全面介绍,列举并解析各类主要收获机械,如采收机器人、联合收割机、专用采摘机等,对其工作原理、适用范围、性能指标进行详细说明。
同时,对比分析不同地区、不同类型蔬菜在机械化收获方面的差异与特色。
关键技术与创新点:聚焦于蔬菜机械化收获的关键技术瓶颈与突破,如智能化识别与定位、柔性抓取与处理、损伤控制与品质保持等。
讨论现有技术解决方案、最新科研成果以及成功应用案例,揭示技术进步如何解决实际生产中的复杂问题,并提升收获作业的整体效能。
发展趋势与前景展望:基于对行业动态、政策导向、市场需求及技术前沿的深入洞察,预测蔬菜机械化收获技术未来的发展趋势,包括智能化、无人化、定制化等方向的演进。
同时,探讨技术推广面临的挑战与对策,以及其在构建智慧农业生态系统、助力乡村振兴战略中的潜在影响。
政策建议与实践策略:结合上述分析,提出促进我国蔬菜机械化收获技术研发、推广与应用的政策建议与实践策略,强调产学研用深度融合、标准体系建设、农民培训与技术服务等关键环节,旨在为相关部门决策提供科学依据,推动我国蔬菜产业向更高层次的机械化、智能化转型升级。
本文旨在提供一个全面、深入的视角,理解蔬菜机械化收获技术的全貌及其发展脉络,为学术研究、技术研发、产业规划及政策制定等相关领域提供有价值的参考。
通过剖析技术现状、探讨创新路径、展望未来趋势,力求激发更多关于提升蔬菜收获机械化水平的思考与行动二、蔬菜机械化收获技术概述蔬菜机械化收获技术是指利用蔬菜收获机进行蔬菜的收割、采摘或挖掘,并完成装运、清理、分级和包装等作业的技术。
果园机械除草装备与技术研究现状及发展趋势

果园机械除草装备与技术研究现状及发展趋势【摘要】果园机械除草是果园管理中一项重要的工作,对果树生长和产量都有着重要影响。
本文通过对果园机械除草装备与技术的研究现状进行分析,探讨了目前存在的问题与挑战。
在装备方面,目前主要以除草机械为主,但存在效率低、作业质量不高等问题;在技术方面,主要以图像识别、智能控制技术为主,但还有待提高精准度和适用性。
未来的发展趋势将是提高除草装备的自动化程度和智能化水平,同时结合新型传感技术和信息化手段,实现更加高效的果园除草管理。
果园机械除草装备与技术的研究具有重要意义,对于提升果园产量和质量、减少人工劳动、保护环境等方面都有积极作用。
未来研究可重点关注机器学习、大数据分析等方面,以推动果园机械除草技术的发展与创新。
【关键词】果园,机械除草,装备,技术,研究现状,发展趋势,创新,重要性,未来方向,总结1. 引言1.1 研究背景果园是农业生产中重要的经济作物种植基地,然而由于果园作物生长茂密、枝叶繁盛,常常会被杂草侵占,严重影响果园作物的生长发育和产量。
传统的人工除草方式效率低下、劳动强度大,无法满足果园除草的需要。
为了解决这一问题,果园机械除草装备应运而生。
果园机械除草装备通过机械化作业,能够快速、有效地清除杂草,提高果园作物的生长环境,保证果园作物的生长品质和产量。
目前果园机械除草装备仍然存在一些问题,比如装备性能不稳定、适用范围有限、操作复杂等。
对果园机械除草装备进行技术研究和改进显得尤为重要。
只有不断提升装备性能、拓展应用领域,才能更好地满足果园除草的需求,提高果园作物的产量和质量。
果园机械除草装备的研究和发展已成为当前农业领域的热点话题,对于推动果园管理方式的现代化、提高果园生产效率具有重要意义。
1.2 研究意义果园机械除草装备与技术研究的重要性在于提高果园的生产效率和质量。
传统的手工除草方式费时费力,效率低下,而且容易造成农药残留,对果园环境和果实品质造成负面影响。
采摘机器人的研究进展与现状分析

谢谢观看
在传感器技术方面,采摘机器人需要使用多种传感器来获取作物的位置、颜色、 大小等信息。例如,机器视觉技术可以通过分析图像中的颜色和形状来确定目 标作物的位置,而深度传感器则可以获取作物的三维信息。这些传感器技术的 结合使得采摘机器人能够更加准确地识别和定位目标作物。
在人工智能方面,采摘机器人的智能化程度越来越高。通过机器学习算法的训 练,机器人可以学习如何识别作物并进行采摘。同时,机器人还可以根据环境 因素(如天气、光照等)的变化来调整自身的采摘策略,以适应不同的采摘环 境。
2、智能化程度的进一步提高:未来的采摘机器人将具备更加智能化的算法和 传感器技术,以便更好地适应各种不同的采摘环境和任务。例如,通过使用更 加先进的机器学习算法和计算机视觉技术,机器人将能够更加准确地识别和定 位目标作物,并自动调整自身的采摘策略以适应不同的环境因素。
3、移动性和灵活性的进一步提升:未来的采摘机器人将具备更加灵活的机械 臂和传感器系统,以便更好地适应各种不同的采摘任务。例如,通过使用可折 叠式的机械臂和传感器系统,机器人将能够在不同的采摘场景中自由切换姿态 和位置,从而提高采摘效率和质量。
2、遥控与远程监控技术
随着无线通信技术的发展,遥控与远程监控技术也被广泛应用于移动式采摘机 器人。操作者可以通过手机或电脑对机器人进行远程操控,实时获取机器人的 工作状态、位置信息以及故障预警等数据,实现对机器人高效管理和监控。
3、人工智能算法的优化与改进
针对采摘机器人视觉识别、路径规划等关键问题,人工智能算法不断得到优化 与改进。深度学习算法的应用已经从传统的卷积神经网络(CNN)扩展到强化 学习、迁移学习等多种领域,提高了机器人的自主性和适应能力。
四、结论
移动式采摘机器人的研究和发展为现代农业提供了强有力的支持。尽管现有的 研究已经取得了显著成果,但仍存在许多挑战和问题需要解决。未来研究应多 传感器融合与信息融合技术的进一步发展、算法的持续优化以及远程监控技术 的深入研究等方面,以提升采摘机器人的工作效率和智能化水平。随着科技的 不断进步和创新,相信移动式采摘机器人的应用和发展将会为现代农业带来更 加美好的未来。
采摘机械发展现状

采摘机械发展现状
近年来,随着农业机械化的推进,采摘机械的发展得到了极大的关注和重视。
采摘机械广泛应用于农业生产中的各个领域,如水果、蔬菜、茶叶等作物的采摘工作。
这些机械设备极大地提高了采摘效率,减轻了劳动负担,对农业生产起到了积极的推动作用。
目前,采摘机械市场呈现多元化的发展趋势。
一方面,传统的人工采摘方式逐渐被机械化设备所取代。
各种类型的采摘机械不断涌现,包括果树采摘机、蔬菜采摘机、禾苗采摘机等。
这些机械在采摘作业中具有高效率、精确度高、损失率低等特点,极大地提高了采摘作业的质量和效益。
另一方面,随着人工智能、机器学习等技术的发展,智能化的采摘机械开始进入市场。
这些机器可以通过图片识别、深度学习等技术来识别和采摘作物,使采摘过程更加智能化和自动化。
这不仅减少了人工操作的需求,还能根据不同的作物特点进行精确采摘,提高了采摘的效率和质量。
此外,在采摘机械的发展中,节能环保也成为一个重要的方向。
越来越多的采摘机械开始采用电动或混合动力技术,减少了对化石能源的依赖,减少了环境污染。
同时,一些机械还采用了新型的材料和设计,降低了能耗和噪音,提高了机械的可持续发展性。
综上所述,采摘机械正处于快速发展的阶段。
随着科技的进步
和需求的不断增长,采摘机械将不断创新和改进,为农业生产提供更加高效、智能和环保的解决方案。
蔬果采摘机器人的研究进展与展望

蔬果采摘机器人的研究进展与展望随着全球人口的增长和营养素需求的增加,农业生产的规模和效率成为重要的问题。
在传统的农业生产过程中,蔬果采摘是一个人工劳动密集的环节,需要大量的人力资源和时间。
为了提高农业生产效率和减轻人力负担,蔬果采摘机器人成为了一个备受关注的研究领域。
本文将就蔬果采摘机器人的研究进展和展望进行论述。
1. 研究现状目前,蔬果采摘机器人的研究日益进展,研究内容包括机器人的设计和控制方法。
设计方面,采用机器视觉和智能算法来指导机器人的动作,使得机器人能够识别目标对象和进行自主移动。
控制方面,主要是通过传感器和执行器来实现机器人的操作,并且配备了控制系统来监测机器人的运行状态和调节机器人的行为。
在机器人的设计中,机器人的形状和结构根据目标种类的不同而有所不同,例如森林生长在土壤中的蔬菜采收机器人更具有穴居虫的形状,蔬菜的枝段收割机器人的形状则稍微弯曲,以适应蔬菜底部和的生长环境。
在机器人控制方面,对比机电传动和液压驱动,由于空气动力学的优越性和绿色环保的考虑,电动化已经成为非常流行的选择。
传感器方面,蔬果采摘机器人配备的传感器主要包括相机、雷达和超声波传感器等,可以提供足够的环境感知,使得机器人能在不同种类蔬果的环境下进行高效采摘。
此外,一个完整的采摘过程,机器人在触摸目标作物时,应同时计算出环境中其他植物利用立体视觉技术将其识别出来,以避免机器人伤害到不成熟的作物。
目前,蔬果采摘机器人具备高速度和精准性,能够快速地对任何大小和类型的蔬果进行采摘工作。
与传统的人工采摘相比,机器人能够实现快速、准确的采摘,提高了农产品质量和生产效率。
机器人在农业生产中的应用,也是社会和环境可持续发展的一个重要体现。
2. 展望未来虽然目前蔬果采摘机器人取得了一定的成果,但它依然存在一些挑战和困难。
其一是机器人的效率问题。
机器人处理速度还不够快,容易出现执行器动作不够精确、指向不准确等问题,导致采摘效果较差。
国内外玉米收获机械发展现状及展望

此外,智能控制技术也在玉米收获机械中得到了广泛应用。通过引入GPS、 传感器、物联网等技术,可以实现玉米收获机械的自动化导航、故障诊断和产量 监测等功能,有效提高生产效率。
三、市场需求
随着国内外玉米种植规模的扩大和农业生产模式的转变,玉米收获机械的市 场需求也呈现出迅速增长的趋势。
在国际市场上,由于玉米种植面积的不断扩大和劳动力成本的上升,许多国 家的玉米收获机械需求持续增加。特别是在美国、加拿大等大型玉米种植国,对 玉米收获机械的需求尤为强烈。这些国家对大型、高效、智能化的玉米收获机械 需求尤为突出。
五、结论与展望
通过对国内外玉米收获机械的发展现状和市场需求进行分析,可以得出以下 结论:
1、玉米收获机械在农业生产中具有重要意义,国内外对其需求持续增加;
2、国内外玉米收获机械的技术水平不断提升,智能化和自动化程度不断提 高;
3、市场需求持续增加,尤其在大型玉米种植国和主产区对大型、高效、智 能化的玉米收获机械需求尤为突出;
4、研究方法主要包括文献综述、市场调研和数据收集等方面,这些方法可 以帮助我们更好地了解市场现状和发展趋势。
参考内容
牧草收获机械的发展,在提高农业生产效率,促进农业可持续发展方面起到 了重要的作用。本次演示将探讨国内外牧草收获机械的现状及其发展趋势。
一、国外牧草收获机械发展现状
在欧美等发达国家,牧草机械的发展已经有一百多年的历史。这个过程经历 了从使用畜力作为动力源到与拖拉机动力配套,从单项作业机具到成套机具,从 分段作业机具到联合作业机具等阶段。
国内外玉米收获机械发展现状 及展望
01 一、研究现状
目录
02 二、技术特点
03 三、市场需求
04 四、研究方法
05 五、结论与展望
江苏甘蓝机械化收获技术与装备调研

江苏甘蓝机械化收获技术与装备调研
李丹阳
【期刊名称】《农机科技推广》
【年(卷),期】2024()4
【摘要】为及时跟进我国现阶段甘蓝收获机研制进展,2023年12月1日,农业农村部农业机械化总站经作机械处赴江苏常熟参加“甘蓝联合收获与智能转运关键技术装备”成果现场观摩交流会,对甘蓝机械化收获技术与装备情况进行了调研。
【总页数】2页(P55-56)
【作者】李丹阳
【作者单位】农业农村部农业机械化总站
【正文语种】中文
【中图分类】S63
【相关文献】
1.走进鱼米之乡谱写“沭河”水稻机械化收获新篇章——农业装备公司稻麦收割(打捆)机江苏机械化收割现场会侧记
2.大力推广玉米收获机械化技术全面提高我市农机化水平——对牡丹江收获机械化调研报告
3.农业农村部南京农业机械化研究所十项重大科技进展(一) 花生机械化收获关键技术与系列装备
4.甘蓝机械化收获技术研究现状与发展趋势
因版权原因,仅展示原文概要,查看原文内容请购买。
蔬菜种子精量直播技术与装备研究进展

蔬菜种子精量直播技术与装备研究进展目录一、内容描述 (2)1. 研究背景与意义 (3)2. 国内外研究现状及发展趋势 (4)二、蔬菜种子精量直播技术 (5)1. 种子精选与处理技术 (7)1.1 种子筛选方法 (8)1.2 种子处理剂及其应用 (9)2. 精量播种技术 (10)2.1 播种机械与装置 (11)2.2 播种参数优化 (12)3. 精量播种监控技术 (14)3.1 传感器技术与应用 (15)3.2 数据分析与决策支持系统 (16)三、蔬菜种子精量直播装备 (17)1. 装备分类与特点 (19)1.1 播种机 (20)1.2 播种器 (21)1.3 监控设备 (22)2. 装备集成与优化 (24)2.1 整机集成技术 (25)2.2 功能模块设计 (26)2.3 性能优化与测试 (27)四、蔬菜种子精量直播效果评估 (28)1. 产量与品质鉴定指标 (29)2. 技术经济指标分析 (30)3. 生产环境适应性评价 (31)五、问题与展望 (33)1. 存在问题与挑战 (34)2. 发展趋势与创新方向 (36)3. 应用前景与推广建议 (37)一、内容描述随着现代农业技术的迅速发展,蔬菜种子精量直播技术因其能够精确控制种子用量,提高播种精度和效率,减少种子浪费,已成为蔬菜育种领域的研究热点。
而与之相匹配的装备研究,也日益受到重视,旨在实现种子直播的自动化、智能化和精准化。
蔬菜种子精量直播技术涉及多个环节,包括种子精选、处理、包衣、播种、覆盖等。
种子的精选和处理是基础,直接关系到直播的效果和质量。
通过精细化的筛选,可以去除杂质和不合格种子,确保直播用种的纯度和活力。
处理方法包括化学处理、生物处理等,可以改善种子的生理特性,提高其发芽率和适应性。
播种装备是实现精量直播的关键,市场上的播种机械种类繁多,但大多存在播种不均匀、种子落点不准确等问题。
针对不同作物和种植环境,研发出具有精确计量、变量控制等功能的播种装备,成为当前研究的重要方向。
莲藕收获机械研究现状及发展趋势
莲藕收获机械研究现状及发展趋势莲藕是一种常见的水生植物,其根茎富含淀粉和蛋白质,是人们日常饮食中的重要食材。
然而,由于莲藕的种植和收获过程需要大量的人力和时间,因此研发莲藕收获机械已成为当前的研究热点。
本文将介绍莲藕收获机械的现状及发展趋势。
一、莲藕收获机械的现状目前,莲藕收获机械主要分为两种类型:一种是利用挖掘机械进行收获,另一种是利用专门的莲藕收获机械进行收获。
1. 利用挖掘机械进行收获利用挖掘机械进行莲藕收获是一种较为常见的方式。
这种方式主要是利用挖掘机械的铲斗进行莲藕的挖掘和收获。
这种方式的优点是操作简单,成本较低,但是由于挖掘机械的铲斗较大,容易损坏莲藕,因此收获效果不太理想。
2. 利用专门的莲藕收获机械进行收获利用专门的莲藕收获机械进行收获是一种较为高效的方式。
这种机械主要是利用切割器和收藕器进行莲藕的切割和收获。
这种方式的优点是收获效果好,损伤率低,但是成本较高,需要专门的机械进行收获。
二、莲藕收获机械的发展趋势随着科技的不断发展,莲藕收获机械也在不断地改进和完善。
未来,莲藕收获机械的发展趋势主要有以下几个方面:1. 自动化程度更高未来的莲藕收获机械将更加自动化,可以实现自动化的种植、收获和运输。
这样可以大大提高生产效率,减少人力成本。
2. 智能化程度更高未来的莲藕收获机械将更加智能化,可以实现自动化的控制和调节。
这样可以大大提高生产效率,减少人力成本。
3. 精准化程度更高未来的莲藕收获机械将更加精准化,可以实现对莲藕的精准识别和收获。
这样可以大大提高收获效果,减少损伤率。
4. 环保性更好未来的莲藕收获机械将更加环保,可以实现零排放和低噪音。
这样可以大大减少对环境的污染和对人的干扰。
总之,莲藕收获机械的发展趋势是自动化、智能化、精准化和环保化。
未来的莲藕收获机械将更加高效、节能、环保和智能化,为莲藕种植和收获带来更多的便利和效益。
果园机械除草装备与技术研究现状及发展趋势
果园机械除草装备与技术研究现状及发展趋势果园机械除草装备与技术研究现状及发展趋势导言:随着农业现代化的推进,果园机械除草装备与技术的研究也日趋重要。
传统的手工除草方式效率低,劳动强度大,并且无法满足大面积果园的需求。
因此,研究果园机械除草装备与技术已成为提高果园管理效率、降低生产成本的重要途径。
本文将分析果园机械除草装备与技术的研究现状,并探讨其发展趋势。
一、研究现状:1. 机械除草装备:随着科技的不断进步,各种类型的果园机械除草装备出现了许多新的发展。
传统的除草机主要采用旋耕松土技术,但效率低、耗能大,且对土壤有一定的破坏。
目前,光电感应、红外线辐射等传感技术应用于果园机械除草装备中,使得机械除草装备能够更加精准地识别和除掉杂草。
例如,激光定位系统能够识别果树和杂草,通过机械手臂实施除草。
此外,还出现了可植入式无线传感网络技术,果园管理者通过远程控制,实现对果园机械除草装备的自动化控制。
2. 机械除草技术:机械除草技术包括刀割、喷雾和挤压等多种方式。
其中,刀割技术是最常用的机械除草技术之一。
通过机械设备的旋转切割,有效地控制了杂草的数量。
喷雾技术则是通过喷洒除草剂来达到除草的目的,但存在环境污染和化学物质残留的问题。
挤压技术则是通过机械装备对杂草进行挤压,压制其生长。
二、发展趋势:1. 无人机技术的应用:无人机技术在果园机械除草装备领域有着广阔的应用前景。
通过搭载各种传感器和摄像设备,无人机能够实时感知果园的情况,并通过图像识别技术和人工智能算法来自动识别和除草。
无人机除草具有作业效率高、工作范围广的优势,能够极大地提高果园作业的效率和准确性。
2. 智能化管理系统:随着物联网技术的发展,果园机械除草装备与技术的发展趋势是智能化管理系统的应用。
通过传感器、监控设备和数据分析技术,可以对果园的环境、土壤和植株进行实时监测和分析。
结合人工智能算法,可以实现自动识别杂草、制定除草计划,并实施智能化的除草作业。
果园机械除草装备与技术研究现状及发展趋势
果园机械除草装备与技术研究现状及发展趋势【摘要】果园机械除草在现代农业中扮演着重要角色,提高了果园的生产效率和品质。
本文通过对果园机械除草装备与技术研究现状的探讨,分析了目前果园机械除草装备和技术的发展趋势。
研究表明,目前果园机械除草装备已经较为完善,但仍存在一些技术瓶颈。
未来的研究重点将聚焦在技术创新和装备改进上,以应对不断变化的市场需求。
挑战与机遇并存,需要不断推动创新发展。
果园机械除草装备与技术的未来发展潜力巨大,但面临着诸多挑战。
通过持续的研究与创新,果园机械除草装备与技术将迎来更加美好的未来。
【关键词】果园、机械、除草、装备、技术、研究现状、发展趋势、挑战与机遇1. 引言1.1 研究背景果园机械除草是现代农业生产中的重要环节之一,随着农业机械化水平的不断提升,果园机械除草装备和技术也得到了广泛应用。
果园草本杂草的生长不仅会影响果树的生长发育,还会导致果园土壤的养分消耗和水分蒸发,影响果实的品质和产量。
研究果园机械除草装备与技术的现状及发展趋势,对于提高果园的生产效率、降低生产成本、保护环境、提高果品质量具有重要意义。
当前,国内外在果园机械除草领域的研究逐渐深入,一些先进的除草装备和技术不断涌现,为果园除草提供了更多选择。
由于果园环境复杂多变,果树种类繁多,除草效果受到诸多因素影响,目前果园机械除草装备和技术仍存在一些问题和不足之处。
进一步深入研究果园机械除草装备与技术的现状和发展趋势,探索改进的途径和方向,具有重要的现实意义和应用价值。
1.2 研究目的研究目的是为了探讨果园机械除草装备与技术的现状及发展趋势,从而为果园除草工作提供更有效的解决方案。
通过对现有果园机械除草装备和技术的调查研究,可以了解当前果园除草工作中存在的问题和难点,进而探讨改进的方向和重点。
通过分析发展趋势,可以预测果园机械除草领域的未来发展方向,为相关企业和科研机构制定未来研究和开发策略提供参考。
果园机械除草装备与技术的研究不仅可以提高果园除草效率,减轻劳动强度,降低人工成本,还可以减少化学农药的使用,减少对环境的污染,保护生态环境,促进果园的可持续发展。
叶类蔬菜有序收获机械的研究现状及发展对策

叶类蔬菜有序收获机械的研究现状及发展对策作者:刘东肖宏儒金月来源:《江苏农业科学》2019年第03期摘要:我国是蔬菜生产大国,但目前对于叶类蔬菜的收获主要还是依赖于人工收获,这就大大影响了叶类蔬菜收获的效率,随着我国城镇化进程的加快,农业劳动力资源急剧短缺,叶类蔬菜的收获作为传统劳动密集型产业,收获机械短缺已严重制约了我国新型高效蔬菜产业的发展。
叶类蔬菜有序收获机械的目的是为了实现有序切割、有序输送及有序收集,从而大大提高效率,节约劳动力,降低成本。
为此,针对国内外叶类蔬菜有序收获机械进行综述,分析发展趋势,指出存在的问题,并据此提出未来的研究方向。
关键词:叶类蔬菜;有序收获;机械化中图分类号:S225.92; ;文献标志码: A; 文章编号:1002-1302(2019)03-0027-05我国有着几千年的悠久农业发展史,蔬菜一直是中国人饮食当中不可或缺的食材,并且蔬菜产业一直以来都是我国农业农村经济的重要支柱产业,关乎农民钱袋子和城镇居民菜篮子。
但我国蔬菜的收获机械化水平极低,目前依然沿袭传统的手工采收,严重制约了其规模发展。
近年来,随着设施蔬菜生产技术、蔬菜移栽、灌溉和植保技术的逐渐成熟和广泛应用,蔬菜种植面积和产量逐年增加。
据统计,2015年我国的蔬菜种植面积超过2亿hm2,蔬菜产量达7亿t[1-3],比狭义的粮食产量(指禾本科作物,主要包括稻、麦、糜等)还多。
作业过程当中,收获作业约占整个作业量的40%,但是目前蔬菜机械化水平却只有20%,相对于粮食的机械化水平严重滞后,与其相应的地位严重不符。
因此,对蔬菜收获过程实现机械化的要求越来越迫切[4-9]。
由于蔬菜品种繁多,蔬菜的机械化收获也要根据其种类采取不同的办法来完成,根据收获部位不同,蔬菜收获机一般可分为叶类蔬菜收获机、根菜类蔬菜收获机、果菜类蔬菜收获机。
就叶类蔬菜收获机而言,一般主要包括分禾装置、切割装置、输送装置等,其中分禾装置扶持茎秆,切割器进行切割,输送装置将切下的叶菜送往料箱。
蔬菜生产机械化现状及发展对策

通过建立蔬菜生产机械化示范基地, 展示机械化的优势和应用效果,引导 农民转变观念,促进机械化技术的推 广和应用。
技术创新
研发新型机械
鼓励和支持企业加大技术研发投入,针对蔬菜生产的特殊需求,研发具有自主 知识产权的新型机械设备,提高机械的性能和适应性。
引进国外先进技术
积极引进国外先进的蔬菜生产机械化技术,消化吸收再创新,提升我国蔬菜生 产机械化的整体水平。
提高生产效率
蔬菜生产机械化能够显著提高 生产效率,减少人工成本,增 加产量。
改善生产环境
机械化生产可以减少人工作业 对环境的破坏,提高土地利用 率。
技术要求高
机械化生产需要一定的技术水 平和管理经验,对操作人员的 要求较高。
蔬菜生产机械化面临的问题
技术研发不足
目前蔬菜生产机械化的 技术研发不足,缺乏具 有自主知识产权的核心
利用人工智能、物联网、大数据等技术手段,实现蔬菜生产的智能化管理。例如,通过智 能化技术,可以实时监测蔬菜的生长情况,自动调节温室内的环境参数,提高蔬菜的生长 效率。
自动化技术
自动化技术是蔬菜生产机械化的重要组成部分,包括自动化种植、自动化施肥、自动化喷 药等环节。通过自动化技术,可以大大提高蔬菜生产的效率和质量,减少人工成本和劳动 强度。
保障食品安全
通过标准化、规范化的蔬 菜生产,机械化将有助于 保障食品安全,满足消费 者对健康食品的需求。
THANKS
感谢观看
技术。
机械适应性差
现有的蔬菜生产机械适 应性较差,难以满足不 同地区、不同品种的蔬
菜生产需求。
劳动力素质低
目前从事蔬菜生产的劳 动力素质较低,对机械 化生产的接受程度有限。
政策支持不足
大白菜收获机1

题目:大白菜收获机机械部份——锁紧及切削机构的设计学院:摘要随着新的农业生产模式和新技术的发展与应用,农业机器将成为农业生产的主力军。
该文在分析大白菜收获机工作特点的基础上,从大白菜的采摘、转运、打包等方面进行分析。
其中主要对锁紧机构和切削刀部分做了详细的说明。
该大白菜收获机适用于家用收割大白菜,结构简单、制造成本低。
该大白菜收获机的锁紧部分采用斜楔锁紧,切削刀采用固定式切削刀,本文主要介绍了斜楔锁紧机构的设计过程,对它可能出现的松动做了相应的放松措施。
对于切削过程中刀具可能出现的状况做了相应的分析。
还对其各零件的结构和选材做了详细的分析。
整个结构简单、可操作性强、安全可靠。
关键词:大白菜、收获机、斜楔锁紧、固定式切削刀Subject: Designing of cabbage harvest machineryAbstractWith the new model of agricultural production and new technology development and application of agricultural machinery will become a major force in agricultural production. In this paper, the analysis of the characteristics of Chinese cabbage harvesting machine work on the basis of the picking from the Chinese cabbage, transit, packaging, etc. for analysis. The main body of the lock and cutting knife part of a detailed description. The Chinese cabbage harvesting machine for cabbage harvest home, simple structure, low manufacturing costs.The Chinese cabbage harvesting machine parts Wedge locking locking, the use of fixed cutting knife cutting knife, the paper introduces the body Wedge Lock design process, it may be loosened so the corresponding relaxation. Tool for cutting the course of the situation that may arise to do the corresponding analysis. Also parts of its structure and material to do a detailed analysis. The entire structure is simple, feasible, safe and reliable.Keywords: Chinese cabbage; Harvesting machine; Wedge Lock; Fixed cutting knife目录摘要 (I)1 绪论............................................................................................................................................................ - 1 -1.1引言 (1)1.2大白菜收获机总体部分的介绍 (1)1.2.1 收获机提升运输装置简介.......................................................................................................... - 2 -1.2.2收获机输送部分简介..................................................................................................................... - 3 -1.2.3 锁紧机构简介................................................................................................................................ - 4 -2 锁紧机构的设计............................................................................................................................................ - 6 -2.1锁紧装置的设计要求 (6)2.3锁紧机构的原理设计 (6)2.4锁紧机构的零件设计 (7)2.4.1 斜楔的设计.................................................................................................................................... - 7 -2.4.2 滑动块的设计................................................................................................................................ - 8 -2.4.3 导轨的设计.................................................................................................................................... - 9 -2.5防松装置的零件设计.. (9)2.5.1 防松机构的原理说明.................................................................................................................. - 10 -2.5.2 弹簧的设计.......................................................................................................... 错误!未定义书签。
苏南地区小青菜生产关键环节机械化技术研究与实践

苏南地区小青菜生产关键环节机械化技术研究与实践作者:朱正阳来源:《安徽农学通报》2021年第02期摘要:通过引进适宜的农机装备,确定了小青菜生产关键环节机械化作业技术路线,并对该技术路线所配置的机具进行了田间实际生产试验,对比研究该机械化生产技术路线的适用性与经济性。
结果表明,该技术路线可实现节本4107元/hm2,节本增效显著。
关键词:小青菜;机械化生产;技术研究中图分类号 S633.3;S233.74 文献标识码 A 文章编号 1007-7731(2021)02-0124-02Research and Practice of the Mechanization Technology in Brassica chinensis Production in Southern JiangsuZHU Zhengyang(Zhangjiagang Agricultural Machinery Technology Extension Station, Zhangjiagang 215600, China)Abstract:The mechanization operation technology route of Brassica chinensis was determined by introducing suitable agricultural machinery equipment.Then,the applicability and economy of the mechanized technology route was comparative studied through field production test.The test results showed that the economic benefit of the mechanized technology route was obvious,which can save 4107 yuan/hm2 of operation cost.Key words: Brassica chinensis; Mechanized production; Technical exploration近年来,随着江苏省农机“两大工程”项目的大力实施与推进,全省农机化事业持续快速发展,农业产业转型L级明显加快,一大批设施蔬菜产业基地不断做大做强。
结球生菜丰产栽培技术
结球生菜丰产栽培技术作者:刘江利来源:《西北园艺·蔬菜》2022年第02期叶菜生长期较短,见效快,价格高,效益好,近年来陕西兴平叶菜产业发展势头强劲,生产规模不断增加,目前叶菜面积1万余亩,其中生菜面积稳定在2 000亩以上。
现将结球生菜丰产栽培技术总结如下,供菜農朋友们参考应用。
1 品种选择选择抗逆(抗病)性强、高产优质的品种,比如伊赛斯(1Zanas)、肯考特(Concorde)等。
2 播种育苗2.1 播种期结球生菜1年可播种两茬(春茬和秋茬),一般苗龄在30~45天,定植后55~80天可收获。
春茬1月中下旬育苗,3月上中旬定植,5月份收获;秋茬7月中旬育苗,8月中下旬定植,10—11月份收获。
2.2 种子处理播种前浸种催芽,保证出苗率。
先将种子浸泡3~4小时,搓洗控水后装入纱布袋,或用湿布包起来,置于15~20 ℃环境中催芽,每天用清水冲洗1遍,经2~3天发芽后即可播种。
2.3 播种采用基质穴盘育苗,操作简单方便。
一般选用128孔穴盘,装好基质后,每穴中间放1粒种子,摆放在育苗棚内。
春茬注意保温,可搭二道膜增强保温能力;秋茬注意防雨降温,可用遮阳网或降温剂调控温度,保证幼苗正常生长。
2.4 苗期管理播种后保持基质湿润,棚内温度20~25 ℃,3~5天可齐苗。
一般春茬每天洒水,秋茬苗期处在高温时早晚洒两次水,保持土壤湿润。
白天温度保持在18~20 ℃,夜间温度保持在8~10 ℃。
幼苗长到2叶1心时,可用75﹪百菌清可湿性粉剂600倍液加5%啶虫脒乳油1 000倍液加磷酸二氢钾500倍液喷施1次,预防病虫害,增加养分。
幼苗长到4叶1心时及时定植。
3 苗木定植3.1 整地施肥亩施优质农家有机肥5 000 kg左右,配合三元复合肥40 kg,深翻25 cm,然后整平做畦,畦面宽50~60 cm,行宽40~ 50 cm。
3.2 定植方法在畦面按行距40~45 cm、株距30~35 cm定植,早熟品种适当密植,中晚熟品种适当稀植,亩栽苗4 000~5 000株。
果蔬采摘机器人的现状及发展综述

果蔬采摘机器人的现状及发展综述
万乾程;卢泽民;高星星;吕程辉;罗欣;廖剑;万傲;庞雄斌;谢敬波
【期刊名称】《数字农业与智能农机》
【年(卷),期】2024()3
【摘要】果蔬采摘自动化、智能化、无人化是果蔬产业发展的最终目标,但果蔬采摘机器人的技术及市场应用仍是制约果蔬产业发展的重要瓶颈。
对果蔬采摘机器人在国内外的研究现状和发展趋势进行了阐述与剖析,指出了目前果蔬采摘机器人发展存在的问题,结合果蔬产业应用场景和发展要求,提出农机与农艺应更广泛地深度融合。
同时,针对采摘机器人存在的成本高、维护难、操作技术要求高等问题,对研制与生产高性能、高效率、高可靠的果蔬机器人采收装备提出了发展建议。
【总页数】5页(P24-28)
【作者】万乾程;卢泽民;高星星;吕程辉;罗欣;廖剑;万傲;庞雄斌;谢敬波
【作者单位】武汉市农业科学院;武汉轻工大学
【正文语种】中文
【中图分类】TP242.3;S225
【相关文献】
1.果蔬采摘机器人研究综述
2.果蔬采摘机器人末端执行器研究综述
3.果蔬采摘机器人研究综述
4.果蔬采摘机器人视觉系统研究综述
5.我国果蔬采摘机器人技术发展现状及展望
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract: With the rapid development of vegetable industry and the increasing shortage of rural labor force, China's vegetable production has gradually developed towards mechanization. On the analysis of the knot ball vegetables growth characteristics and classification, on the basis of focusing on cabbage, Chinese cabbage at home and abroad and leafy vegetables such as harvest key technology in detail and compared with the typical equipment, the analysis of taking the ball leaf vegetables harvest mechanization, the existing problems in the development of technology, combined with the patent analysis, analysis of taking the ball leaf vegetables harvest technology development trend and key technology research, in order to put forward to solve the current knot ball leaf vegetables mechanized harvesting the key technical problems and related Suggestions, for the future and leaf vegetables harvest mechanization equipment research and development to provide reference for reference. Key words: Corm leaf vegetables; Harvester; Equipment
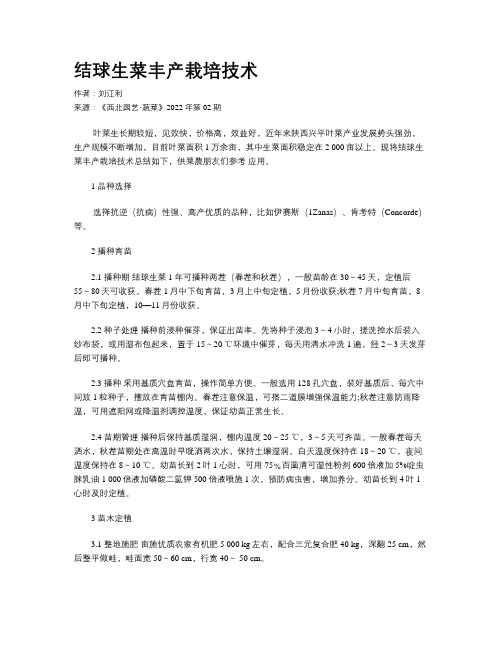
型拔取装置均通过 1 对反向运转的部件作用于结球
叶菜底部和根茎部,引导结球叶菜至输送提升装置,
主要结构特点如表 1。
表 1 四种拔取装置的结构特点
NO 拔取装置类型 结构组成
1
链条式
链条
2
铲式
பைடு நூலகம்
引拔铲
3 螺旋锥式 锥形螺旋杆
特点 易堵塞,效率低,损伤较大 结构简单,拔取后植株易倾斜 一般与双螺旋杆输送装置相连接,
doi:10.13620/ki.issn1007-7782.2019.02.008 中图分类号: S225.92 文献标识码院A
0 引言
结球叶菜是叶菜的一种,其收获机械的典型代 表是甘蓝收获机械,将植株从土壤中拔出后向后传 送,最后完成根茎的切除、剥叶、收集等工序。关键部 件主要包括拔取和输送装置、茎部切割装置及剥叶 装置等。自 1931 年前苏联成功研制出了第一台甘蓝 收获机以来,国外许多国家都展开了对结球叶菜收 获机械的研究工作。经过近 80 年的发展研究,俄罗斯、 日本、美国等国家和地区已经投入实际生产,国内对 蔬菜收获机械的研究,尤其是结球叶菜收获机械仍处 于理论研究和试验阶段。本文重点分析了甘蓝收获 机、大白菜收获机等结球叶菜收获机械关键部件的 研究进展,为今后结球叶菜机械化收获装备的研发 提供参考。
修回日期院2019-04-19
1 拔取输送装置研究现状
1.1 拔取装置
在蔬菜的整个机械化收获工艺过程中,蔬菜的
拔取是第一步,其拔取装置主要用于将结球叶菜等
整颗植株连根拔取,随后,通过输送提升装置提升和
输送蔬菜,因此拔取的作业质量直接关系到后续各
个环节的作业效果[1]。目前,最常见的拔取装置形式
有链条式、铲式、螺旋锥式和圆盘式 4 种。以上 4 种类
圆园19 年第 2 期
新疆农机化
窑开发研究窑
文章编号院1007-7782渊2019冤02-0029-06
结球叶菜收获机械关键技术与装备研究现状
张 静,韩长杰,郭 辉,徐 阳,周 军
(新疆农业大学机电工程学院,新疆 乌鲁木齐 830052)
摘 要院随着蔬菜产业的快速发展和农村劳动力的日益短缺,我国的蔬菜生产逐渐向机械化方向发展。在分析结球类 蔬菜生长特性和分类的基础上,对国内外甘蓝、大白菜等结球叶菜收获的关键技术和典型设备进行了详细阐述和比 较,剖析了结球叶菜收获机械化技术发展存在的问题,以此提出解决当前结球类叶菜机械化收获关键技术问题和相 关建议,为今后结球叶菜机械化收获装备的研发提供借鉴参考。 关键词院结球类叶菜;收获机械;装备
4
圆盘式
圆盘
拔取效率高,加工较复杂 结构简单,工作可靠,安装调整方便,
切割质量、效率高,对直线行驶要求 高
援 29 援
窑开发研究窑
新疆农机化
圆园19 年第 2 期
1.1.1 链条式 世界上第一台由前苏联在 1931 年开发的甘蓝
收获机采用左右回转链条结构提取甘蓝,链条的内侧 由弹簧压紧,两组拔取器分别固定在刮板式输送器的 两端,当链条工作时,链条拉住甘蓝的根部将其拔出 土壤,但田间试验证明该链条式拔取器工作时受甘蓝 尺寸和根茎位置影响较大,对于根茎较低的甘蓝,拔 取装置很难达到根茎处,且易落入链条内阻碍链条正 常回转运动,导致甘蓝堵塞和堆积,因此在后续的甘 蓝收获机械研究中很少见到链条式结构[2]。 1.1.2 铲式
Research Status of Key Technology and Equipment of Corm Leaf Vegetable Harvester
ZHANG Jing, HAN Changjie, GUO Hui, XU Yang袁ZHOU Jun
(College of Mechanical and Electrical Engineering, Xinjiang Agricultural University, Urumqi 830052, Xinjiang, China)