空间观测序列图像目标运动成像仿真
目标定位跟踪算法及仿真程序
目标定位跟踪算法及仿真程序目标定位和跟踪是机器视觉和计算机图形学中一个重要的研究领域,旨在实现对视频图像中的目标进行准确的定位和持续的跟踪。
随着计算机视觉和深度学习的发展,目标定位和跟踪的算法也在不断进步和创新。
本文将介绍目标定位和跟踪算法的基本原理,并给出一个基于Python的仿真程序实例。
目标定位算法的基本原理是通过图像处理和特征提取来找到目标在图像中的位置。
常用的算法包括边缘检测算法、颜色分割算法、模板匹配算法等。
边缘检测算法通过检测图像中的边缘来定位目标,常用的算法有Sobel算子、Canny算子等。
颜色分割算法通过检测目标的颜色来定位目标,常用的算法有HSV颜色空间分割算法等。
模板匹配算法通过比对目标特征与图像的相似度来定位目标,常用的算法有模板匹配算法、相关滤波器算法等。
目标跟踪算法的基本原理是通过目标的运动信息和外观特征来实时追踪目标。
常用的算法包括卡尔曼滤波算法、粒子滤波算法、深度学习算法等。
卡尔曼滤波算法是一种常用的线性状态估计算法,通过迭代的方式对目标的位置和速度进行估计。
粒子滤波算法是一种基于贝叶斯滤波的非线性状态估计算法,通过一组粒子对目标的位置进行采样和估计。
深度学习算法利用卷积神经网络等深度学习模型对目标进行特征提取和跟踪。
下面以一个基于Python的仿真程序为例进行说明。
程序首先读取一个视频文件,并使用OpenCV库进行视频的读取和显示。
然后选择目标定位和跟踪的算法,并利用算法对视频帧进行处理,获取目标的位置信息。
最后,通过绘制矩形框来标记目标的位置,并将处理后的视频帧显示出来。
```pythonimport cv2#读取视频文件video = cv2.VideoCapture("video.mp4")#创建窗口dWindow("Object Tracking", cv2.WINDOW_NORMAL)#选择目标定位和跟踪算法#...while True:#读取视频帧ret, frame = video.readif not ret:break#目标定位和跟踪算法处理#...#绘制矩形框标记目标位置cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2) #显示处理后的视频帧cv2.imshow("Object Tracking", frame)#按下ESC键退出程序if cv2.waitKey(1) == 27:break#释放资源video.releasecv2.destroyAllWindows```以上为一个简单的目标定位和跟踪的仿真程序示例,具体的算法实现需要根据具体场景和需求进行选择和开发。
空间目标特性分析与成像仿真技术研究(精)
空间目标特性分析与成像仿真技术研究英文题名 Small Target Characteristical Analysis and Imaging Under Space Clutter 关键词运动特性; 温度场; 动能拦截器; 探测距离; 信噪比; 英文关键词 movement characteristics; temperature field; EKV; detection distance; signal-to-noise ratio; 中文摘要大气层外动能拦截弹在进行弹道导弹防御以及空间对抗环境中,大量采用了可见光红外等光学成像探测器。
分析与研究空间目标在光学探测器上的成像特征,是实现空间目标探测、识别以及系统评估的关键。
空间目标特性分析与成像仿真技术是一项综合讨论空间目标所处环境状态、目标材料特征、目标形状特征、目标运动姿态变化特征、热辐射特征、空间辐射传输理论、探测器性能以及目标成像特点的课题,是为进行空间目标检测以及识别而开展的先导性研究。
本课题立足于理论建模,对空间目标在探测器中的成像特性进行研究,最后得到包含目标以及诱饵在内的红外图像序列。
论文的主要研究内容如下: 1、提出矢量分解与坐标系映射法,很好的解决了空间非圆对称凸体目标在同时受到自旋运动以及进动影响下的面元法线方向的变化建模难题。
2、提出目标中心坐标系,研究了在此坐标系中各种辐照的实时方向矢量计算方法,详细推算了太阳高度角以及方位角。
采用面元分割法,分析了空间凸体目标的表面几何结构。
3、建立了矢量表示的面元热平衡方程,对方程中的多项参数计算进行了优化,大大减少了计算量。
4、研究了温度对于光谱辐射亮度的影响。
为得到较高信杂比,提出最优... 英文摘要Many visiable light and infrared detectors have been adopted for Exoatomospheric Kill Vehicle(EKV) usage in Ballistic Missle Defence and Space Countermeasure. Optical characteristics’analyse and study of spacial targets in the view field of EKV is the key technology for target detection, target identification and system efficiency estimation 摘要 9-10 ABSTRACT 10 第一章绪论 11-16 1.1 课题背景 11-12 1.2 国内外研究现状 12-14 1.3 课题的主要研究内容 14-15 1.4 本文的篇章结构安排 15-16 第二章空间目标的运动特性分析 16-35 2.1 引言 16 2.2 目标中心坐标系以及面元分割16-19 2.3 空间目标的几何模型分析 19-33 2.3.1 太阳光照模型 20-24 2.3.2 目标运动模型 24-31 2.3.3 目标辐射成像模型 31-33 2.4 小结 33-35 第三章空间目标的温度特性分析 35-59 3.1 引言 35 3.2 目标面元受热模型 35-41 3.2.1 太阳直接辐照功率36 3.2.2 地球自身辐照功率 36-38 3.2.3 地球反射太阳光辐射功率 38-39 3.2.4 目标对外能量辐射功率 39 3.2.5 目标升温吸热内能增加 39-40 3.2.6 目标表面各个面元温度不均引起的传热效应 40-41 3.2.7 目标自身的内部器械产生的热能41 3.2.8 热平衡方程 41 3.3 目标温度特性仿真 41-53 3.3.1 球形目标 42-44 3.3.2 锥形目标44-46 3.3.3 碎片目标 46-48 3.3.4 三角棱台目标 48-53 3.4 空间目标辐射成像分析 53-57 3.4.1 目标波段因素 53-56 3.4.2 探测器的入瞳能量计算 56-57 3.5 小结 57-59 第四章空间小目标成像仿真 59-80 4.1 引言 59-60 4.2 光电探测转换技术 60-68 4.2.1 探测器响应特性 60-61 4.2.2 探测器噪声特性 61-63 4.2.3 探测器非均匀性 63-65 4.2.4 探测器成像距离分析 65-66 4.2.5 探测器散焦模糊 66-67 4.2.6 几种典型光电探测器各项属性67-68 4.3 空间三角棱台光学信号仿真 68-76 4.3.1 棱台目标空间辐射变化 68-73 4.3.2 EKV 红外成像序列 73-76 4.4 作用距离分析 76-79 4.5 小结 79-80 结束语 80-82 致谢 82-83 参考文献 83-86 3.3.3 碎片目标 46-48 3.3.4 三角棱台目标 48-53 3.4 空间目标辐射成像分析 53-57 3.4.1 目标波段因素 53-56 3.4.2 探测器的入瞳能量计算 56-57 3.5 小结57-59 第四章空间小目标成像仿真 59-80 4.1 引言 59-60 4.2 光电探测转换技术 60-68 4.2.1 探测器响应特性 60-61 4.2.2 探测器噪声特性 61-63 4.2.3 探测器非均匀性 63-65 4.2.4 探测器成像距离分析 65-66 4.2.5 探测器散焦模糊 66-67 4.2.6 几种典型光电探测器各项属性 67-68 4.3 空间三角棱台光学信号仿真 68-76 4.3.1 棱台目标空间辐射变化 68-73 4.3.2 EKV 红外成像序列 73-76 4.4 作用距离分析 76-79 4.5 小结 79-80 结束语 80-82 致谢 82-83 参考文献 83-86 3.3.3 碎片目标 46-48 3.3.4 三角棱台目标 48-53 3.4 空间目标辐射成像分析 53-57 3.4.1 目标波段因素 53-56 3.4.2 探测器的入瞳能量计算 56-57 3.5 小结 57-59 第四章空间小目标成像仿真 59-80 4.1 引言 59-60 4.2 光电探测转换技术 60-68 4.2.1 探测器响应特性 60-61 4.2.2 探测器噪声特性 61-63 4.2.3 探测器非均匀性 63-65 4.2.4 探测器成像距离分析 65-66 4.2.5 探测器散焦模糊 66-67 4.2.6 几种典型光电探测器各项属性67-68 4.3 空间三角棱台光学信号仿真 68-76 4.3.1 棱台目标空间辐射变化 68-73 4.3.2 EKV 红外成像序列 73-76 4.4 作用距离分析 76-79 4.5 小结 79-80 结束语 80-82 致谢 82-83 参考文献 83-86。
空间目标星载可见光相机成像仿真
密级:()硕士学位论文空间目标星载可见光相机成像仿真作者姓名:许兴星指导教师: 丁雷、研究员、中国科学院上海技术物理研究所学位类别: 工学硕士学科专业: 摄影测量与遥感研究方向:空间目标成像仿真培养单位: 中国科学院上海技术物理研究所2017年4月学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师指导下,进行研究工作所取得的成果。
除文中已经注明引用的内容外,本学位论文的研究成果不包含任何他人创作的、已公开发表或者没有公开发表的作品的内容。
对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确方式标明。
本学位论文原创性声明的法律责任由本人承担。
学位论文作者签名:年月日Space Target Spceborne Visible Light Camera ImagingSimulationByXu XingxingA Dissertation Submitted toUniversity of Chinese Academy of SciencesFor the degree ofMaster of Photogrammetry and Remote SensingShanghai Institute of Technical Physics, University of Chinese Academyof SciencesApril, 2017摘要摘要通过计算机视景仿真技术和图像处理技术可以模拟在轨光学相机观测空间目标的成像过程,生成仿真图像。
一方面,通过仿真图像可以模拟各种观测环境下的观测结果,为空间目标探测和追踪技术研究提供充分的、灵活的数据源;另一方面,仿真技术可以模拟观测系统的各个参数对观测结果、观测性能的影响,为在轨相机的方案设计提供技术支持。
这对空间目标观测、识别和追踪的相关研究具有重要意义。
星载可见光相机观测空间目标的典型场景中包含空间目标、观测相机、恒星背景等天体,描述天体的几何信息需要统一的时间系统和坐标系统。
空间目标的光谱特性仿真及识别
华中科技大学硕士学位论文空间目标的光谱特性仿真及识别姓名:周玲慧申请学位级别:硕士专业:模式识别与智能系统指导教师:张钧;田金文20081224华中科技大学硕士学位论文摘要随着各航天大国研究空间目标光谱成像特性以及以此为基础进行空间探测的技术日趋成熟,为满足空间机动平台的攻防应用需求,需要对空间目标特性进行分析和研究。
由于航天实验费用昂贵,不可能对空间目标成像图都进行实时拍摄,因此根据实验室现有条件,利用计算机模拟生成空间目标和空间背景仿真图并对实验图片进行目标检测识别十分有必要。
论文主要研究了空间目标光谱特性仿真及识别过程中需要考虑的几大问题,包括空间背景特性分析、空间目标特性分析、目标检测与识别算法设计。
论文首先介绍了空间背景仿真原理,分星空背景和地背景两种情况考虑。
讲述了可见光和紫外参考星表的制备流程,简要说明了星图仿真原理,模拟生成了可见光和紫外星图。
同时,对地球背景仿真进行了初步研究,提出一种生成星空与地球背景相结合的背景仿真图的方法,给出了实验结果。
接着,详细阐述了空间目标成像仿真原理及步骤,包括目标三维几何建模、目标表面材质属性、构建目标可见光和紫外光照模型,并介绍光线跟踪算法,依据理论分析,模拟生成了目标仿真图。
然后根据不同参数条件设计仿真实验,结合图片探讨分析了光照方向、相机光轴指向、视场角大小、成像分辨率、探测距离这几个参数对目标仿真图的影响。
实验结果表明,该模型不仅同真实空间目标光谱成像系统比较符合,而且能很好地表征光谱成像系统的关键参数对成像图效果的影响。
最后,对背景仿真图添加高斯噪声和空间碎片,并将之与目标仿真图相叠加,设计相应算法对空间目标进行检测识别,理论分析和仿真实验结果表明,所采取方案是可行的。
关键词:空间目标,光谱特性,背景仿真,目标仿真,检测识别华中科技大学硕士学位论文AbstractWith the development of the space detection technique which is based on the space target’s spectral characteristics, most of the powerful countries are paying great attention to the research and analysis of space target’s characteristics in order to meet the needs of the offensive and defensive system. As the cost of spaceflight experiment is very high, it’s unpractical to acquire real-time space target images in some cases. Thus in order to estimate the recognition algorithms for space target, we need to simulate real-time space target images and background images with a computer. This paper focuses on the simulation of space target’s spectral imaging and the target recognition, including the analysis of the environment characteristics and the target characteristics, the designing of detection and recognition algorithms for space target.In the paper, we first introduce the simulation methods of the space environment including the star field background and the earth background. After discussing how to establish the visible and ultraviolet reference ephemeris, we brief the simulation principle of the star field images, then simulate the images in multi-spectral. Meanwhile, we give a pilot study for the earth background simulation, present a method to simulate the background image which is a combination of earth and star field, then we show the experiment results.After that, we analyze the simulation principle of the space target imaging in detail, including the target’s geometry modeling, the material attributes of the target’s surface, the target’s illumination energy models in multi-spectral, and we introduce the novel retracing algorithm, then simulate the target images according to the theoretical analysis.On this basis, we do several experiments under different circumstances, discuss the influence of each parameter to the effect of simulation images. The parameters include the illumination direction, the optical axis direction, the camera’s visual angel, the image pixels, the distance between camera and target.The experimental results show that, the model not only meets the real spectral imaging system well, but also shows the influence of several key spectral imaging system华中科技大学硕士学位论文parameters to the effect of the simulation images well.Finally, we add the gauss noise and space fragment to the background simulation images, then integrate them into the target images, design the detection and recognition algorithms. Theoretical analysis and experiment results demonstrate that the method is feasible in principle.Key words: space target, spectral characteristics, background simulation, target imaging simulation, detection and recognition独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
空间光学相机成像仿真系统设计与实现
第35卷㊀第11期2020年11月㊀㊀㊀㊀㊀㊀㊀液晶与显示㊀㊀㊀C h i n e s e J o u r n a l o fL i q u i dC r y s t a l s a n dD i s p l a ys ㊀㊀㊀㊀㊀V o l .35㊀N o .11㊀N o v .2020㊀㊀收稿日期:2020G04G25;修订日期:2020G05G28.㊀㊀基金项目:国家自然科学基金(N o .61875190)S u p p o r t e db y Na t i o n a lN a t u r a l S c i e n c eF o u n d a t i o no fC h i n a (N o .61875190)㊀㊀∗通信联系人,E Gm a i l :j i q i @c i o m p.a c .c n 文章编号:1007G2780(2020)11G1177G08空间光学相机成像仿真系统设计与实现樊金鹏1,2,姬㊀琪1∗(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.中国科学院大学,北京100049)摘要:目前相机成像仿真研究存在成像模型少㊁覆盖不全的问题,难以满足相机在复杂观测条件下的仿真需求.因此提出一种基于卫星工具包(S a t e l l i t eT o o lK i t ,S T K )与开源场景图形(O p e nS c e n eG r a p h ,O S G )相结合的空间光学相机成像仿真方案.使用S T K 建立被观测目标与相机的轨道参数,通过数据导入,创建被观测目标表面二维㊁三维景物信息;通过对多种影响模型分析研究,在O S G 中创建影响模型,实现相机在复杂观测条件下的成像过程仿真;利用分布式技术设计系统结构,分模块完成整个仿真系统的开发.实验结果表明,该系统能为空间光学相机在复杂条件影响下的成像过程提供一个良好的仿真环境,为空间光学相机的设计㊁优化提供有力的数据支持.关㊀键㊀词:空间光学相机;成像仿真;影响模型;数字建模;分布式系统中图分类号:T P 394.1;T H 691.9㊀㊀文献标识码:A㊀㊀d o i :10.37188/Y J Y X S 20203511.1177D e s i g na n d i m p l e m e n t a t i o no f i m a g i n g si m u l a t i o n s y s t e mf o r s p a c e o pt i c a l c a m e r a F A NJ i n Gp e n g 1,2,J IQ i 1∗(1.C h a n g c h u nI n s t i t u t e o f O p t i c s ,F i n eM e c h a n i c s a n dP h ys i c s ,C h i n e s eA c a d e m y o f S c i e n c e s ,C h a n gc h u n 130033,C h i n a ;2.U n i v e r s i t y o f C h i n e s eA c ade m y of S c i e n c e s ,B e i j i ng 100049,C h i n a )A b s t r a c t :A t p r e s e n t ,t h e r e s e a r c ho f c a m e r a i m a g i n g s i m u l a t i o nm o s t l y h a s t h e p r o b l e m s o f l e s s i m a Gg i n g m o d e l s a n d i n c o m p l e t e c o v e r a g e ,w h i c h i s d i f f i c u l t t om e e t t h e s i m u l a t i o n r e q u i r e m e n t s o f c a m e r a i n c o m p l e xo b s e r v a t i o n c o n d i t i o n s .T h e r e f o r e ,a n i m a g i n g s i m u l a t i o ns c h e m eo f s p a c eo pt i c a l c a m e r a b a s e do nt h ec o m b i n a t i o no f s a t e l l i t e t o o l k i t a n do p e ns c e n e g r a p hw a s p r o po s e d .S a t e l l i t eT o o lK i t (S T K )w a s u s e d t o e s t a b l i s h t h e o r b i t p a r a m e t e r s o f t h e o b s e r v e d o b j e c t a n d t h e c a m e r a ,a n d t h r o u g h d a t a i m p o r t ,2Da n d 3Ds c e n e i n f o r m a t i o n o f t h e o b s e r v e d o b j e c t s u r f a c e i s c r e a t e d .T h r o u gh t h e a n a l Gy s i s a n dr e s e a r c ho f m a n y i n f l u e n c e m o d e l s ,t h ei n f l u e n c e m o d e l i sc r e a t e di n O p e nS c e n e G r a p h (O S G )t or e a l i z e t h ec a m e r a i m a g i n gp r o c e s s s i m u l a t i o nu n d e r c o m pl e xo b s e r v a t i o nc o n d i t i o n s .T h e d i s t r i b u t e d t e c h n o l o g y w a su s e d t od e s i g n t h e s y s t e ms t r u c t u r e a n dc o m p l e t e t h ed e v e l o pm e n t o f t h ew h o l e s i m u l a t i o ns y s t e mi n m o d u l e s.T h ee x p e r i m e n t a l r e s u l t ss h o wt h a t t h es y s t e m c a n p r o v i d ea g o o d s i m u l a t i o ne n v i r o n m e n t f o r t h e i m a g i n gp r o c e s so f s p a c eo p t i c a l c a m e r au n d e r t h e i n f l u e n c eo f c o m p l e xc o n d i t i o n s,a n d p r o v i d e p o w e r f u l d a t a s u p p o r t f o r t h e d e s i g n a n d o p t i m i z a t i o n o f s p a c e o p t i c a l c a m e r a.K e y w o r d s:s p a c e o p t i c a l c a m e r a;i m a g i n g s i m u l a t i o n;i n f l u e n c e m o d e l;d i g i t a l m o d e l i n g;d i s t r i b u te d s y s t e m1㊀引㊀㊀言㊀㊀空间光学相机是一种搭载在卫星上来获取地面目标信息的相机,使用空间光学相机观测地物目标是空间观测的主要手段之一[1G4].提高空间光学相机的设计水平以扩展其在空间目标探索中的作用,需要做大量的仿真验证,提供数据支持.针对特定需求,研发人员设计实现相关的仿真软件[5G9].已有研究提出的仿真方案有很多,如中科院空间应用研究中心设计的基于H L A的空间光学探测仿真系统[10],中国科学院大学许兴星㊁丁雷设计的基于O p e n G L的星载可见光相机成像仿真系统[11],解放军信息工程大学提出的航天光学遥感成像半实物仿真系统[12],中科院长春光机所提出的星载相机成像仿真系统[13G14]等.上述仿真方案都实现了空间光学相机的成像过程仿真,但是由于S T K库非开源的特性,无法通过S T K直接添加影响模型,导致部分方案中所包含的影响模型较少,缺少像移影响㊁传输链路影响等影响模型,无法满足空间光学相机日益复杂的仿真需求,可扩展性较差;部分方案采用的集中式系统,面对不同需求时需要重新修改整个系统,可复用性较差.为解决上述问题,本文设计并实现了一款基于S T K与O S G㊁包含多种成像影响模型的分布式空间光学相机成像仿真系统.系统拥有S T K 强大的环境和数据支撑.O S G是一款开源且具有良好的跨平台兼容性的视景仿真技术.通过O S G可以创建偏流角㊁平台颤振等S T K所不具备的影响模型,将模型加入系统之中,使系统满足空间光学相机日益复杂的成像仿真需求.由于O S G开源的特性,可以不断更新模型,提高系统的可扩展性.采用分布式技术使系统在面临不同需求时只需修改局部模块,提高了开发效率,使系统具有良好的复用性.2㊀仿真模块设计2.1㊀仿真模拟系统设计原理空间光学相机成像仿真系统主要通过地面软㊁硬件相结合的模拟方式,仿真空间光学相机在轨工作状态,包括在轨的运控过程㊁外部成像条件㊁光学成像效果㊁对外电子学接口㊁图像数据格式以及在轨的图像处理.以火星探测为例进行设计,仿真系统主要可以分为3个模块:(1)地物环境创建模块;(2)主控模拟模块;(3)相机光学仿真图像生成模块.整个仿真系统使用分布式结构,分模块地进行设计与实现,在提高开发效率的同时,也提升了整个系统的复用性.相比集中式系统,在后续开发过程中,只需要对某个模块单独修改就可以实现整个系统功能的修改,维护也更方便.2.2㊀地物环境创建模块地物环境创建模块的主要作用是生成火星表面三维景物信息.为实现卫星对火星表面视景的仿真模拟,将收集的火星影像与地形数据导入S T K,使用S T K仿真的相关功能迅速准确地确定卫星在轨运行任意时刻的位置,根据相机的视场显示卫星星下点成像覆盖区域,确定光学相机成像可视区域的经纬度范围,并显示可视区域内的三维景物.图1所示为视景仿真流程图.图1㊀视景仿真流程图F i g.1㊀V i s u a l s i m u l a t i o n f l o wc h a r t8711㊀㊀㊀㊀液晶与显示㊀㊀㊀㊀㊀㊀第35卷㊀2.3㊀主控模拟模块该主控模拟模块通过1553B 总线接收地面任务指令,通过R S 422总线接收卫星制导㊁导航与控制系统(G u i d a n c e ,N a v i ga t i o na n d C o n t r o l S ys t e m ,G N C )广播的平台参数,进行实时的像移补偿计算,并将偏流角计算结果反馈给G N C 平台,使其调整姿态;主控模拟模块还可以根据像移补偿计算结果,将拍摄行频㊁级数㊁增益等参数实时传递给相机光学仿真图像生成模块,通过R S 422接口传递给相机光学仿真图像生成模块,使其根据参数输入对生成图像进行调整.2.4㊀相机光学仿真图像生成模块相机光学仿真图像生成模块的主要作用是模拟光学相机的在轨成像,将三维景物信息映射到二维的成像表面.随着G N C 参数的变化,地物环境创建模块的场景管理驱动单元不断更新三维地景信息,模块也将实时地生成二维的虚拟光学影像.相机光学仿真图像生成模块通过调用S T K 生成星体二维和三维图像;仿真卫星在轨运行位置及该时刻下探测器扫描区域接收主控模拟模块发送的数据.根据不同的参数,通过调用O S G 生成实时的星体表面细节仿真图像.模块还可以调用O S G 中不同的成像影响模型,仿真多种影响条件对相机成像效果的影响.图2㊀成像影响模型F i g .2㊀I m a g i n g i m pa c tm o d e l 3㊀成像影响模型分析与创建模拟的火星地表景物经过一系列的链路环节投影至探测器成像焦面.这一过程中,会受到光学㊁电子学㊁信息传输与几何成像等综合影响.如图2所示,对这一系列影响因素按照性质分类,分为3大类,将其进行仿真建模.影响模型的创建在O S G 中实现.利用O S G 开源库的特性,可以自己添加不同的影响模型,使影响模型包含的面更广.后续模型的优化也可以单独在O S G 中实现而不需要大量修改系统代码,极大地增加了系统的扩展性.3.1㊀像移影响模型卫星在宇宙空间中所受到各种复杂的力以及本身姿态调整等会造成卫星颤振[15],同时卫星与地面存在相对运动,这些都会对卫星上的相机成像产生像移影响,需要对其影响进行建模和补偿.3.1.1㊀偏流角影响模型星球自转是偏流角产生的主要因素,设星下点的移动线速度为v n ,星下点地物相对卫星的移动线速度为v n ᶄ,则v n 和v nᶄ的方向相反.考虑火星自转,令星下点地物在纬线上的线速度为v e .根据矢量加法的平行四边形法则,星下点地物相对卫星线速度是v n ᶄ与v e 的合成速度v s u m .卫星偏流角βp 1=a r c t a n (V a e b y /V a e b x ),其中βp 1ɪ(-π/2,π/2),βp 1升轨为负,降轨为正.V a e b y 与V a e b x 是v s u m 在卫星轨道坐标系上x 轴与y 轴的两个分量.考虑卫星偏流角βp1造成的像移,如式(1)所示:δβ=fHvs u m δt ,(1)式中:f 为等效焦距;H 为卫星相机距离地面目标的高度;δt 为一次成像的时间.3.1.2㊀平台震颤影响模型平台颤振影响姿态的稳定性,导致与时间相关的相对姿态误差.在轨运行时,造成平台颤振的成因很复杂,包括外部空间环境和内部机械运作两部分.假设卫星平台颤振在3个姿态角方向都按一定的正弦函数变化,即在t 时刻,平台偏航角ψ(y a w )㊁翻滚角φ(r o l l )㊁俯仰角θ(p i t c h )符合公式(2)~(4):ψ=A ψsi n (ωψt +α),(2)φ=A φs i n (ωφt +γ),(3)θ=A θs i n (ωθt +β).(4)则在3个方向的像移,如式(5)~(7)所示:δy a w =Δs ψ,(5)δr o l l =f ᶄ φ,(6)δpi t c h =f ᶄ θ,(7)式中:Δs 为像点到像主点的距离;f ᶄ为等效焦距.9711第11期㊀㊀㊀㊀㊀㊀㊀樊金鹏,等:空间光学相机成像仿真系统设计与实现3.2㊀入瞳辐照度影响模型空间光学相机对火星地表景物成像的过程实际是景物反射的太阳辐射经过大气和光学系统作用后到达探测器并被接收㊁处理以及量化的辐射传输和光电转换的过程.而从入瞳辐亮度到数字(D i g i t a lN u m b e r,D N)值,需要对大气效应㊁辐射传输等入瞳辐亮度影响过程进行建模.辐射传输与大气效应模型中,地面辐亮度由地物接受的辐照度确定.在获取地面辐亮度信号场的条件下,入瞳辐亮度信号场主要由观测几何条件(高度角㊁方位角㊁观测目标经纬度)和大气条件以及大气后向散射强度共同确定.假设地表面的反射率为ρλ,相机接收到的光谱辐射亮度如式(8)所示:Lλ,s e n s o r=1πρλτλ,A t m(F s Eλ,D i r e c t c o sθs a l o r+V s Eλ,D i f f u s e),(8)式(8)中:F s是投射阴影系数,坡面为阴影则F s为0,否则为1;V s为一点所接收的天空漫反射与未被遮挡的水平而所接受的漫反射之比,介于0和1之间;τλ,A t m为上行大气透过率;Eλ,D i r e c t为太阳光谱辐照度;Eλ,D i f f u s e是天空漫射光到地面的光谱辐照度.3.3㊀传输链路影响模型通过卫星传感器获取的地表景物入瞳辐照度,在传感器内部由光子转换为二进制电子脉冲,在电子脉冲信息传输过程中,会面临电子学㊁信息学因素的影响,对这些因素进行分析和建模[16].3.3.1㊀MT F模型调制传递函数(M o d u l a t i o nT r a n s f e rF u n c t i o n, M T F)衡量了系统对于正弦波输入的振幅响应,主要用来分析一些特定的成像系统,调制传递函数确定了成像系统对于目标细节的分辨本领.M T F本质上就是各个空间频率的正弦波影像经过成像系统后调制损失的百分比.由于实际中衍射㊁像差等作用的影响,实际像的对比度会降低.遥感图像的MT F模拟可以看作是对成像系统介质的模拟.由于一般的遥感系统都是空间不变线性系统,于是系统总的MT F就可以通过这些子单元的MT F相乘得到,表达公式如式(9)所示: MT F总=ᵑn i=1MT F i=MT F光学 MT F C C DMT F变焦 MT F电子学.(9)3.3.2㊀采样模型由于使用三维数字模型模拟地面进行遥感仿真,可采用均匀采样模型这一最基本的模型作为影像仿真中的采样模型,均匀采样是指将一副二维连续图像f(x,y)的图像平面在x方向和y 方向进行等间距划分,从而把二维图像平面划分成MˑN个网格,取网格中心点的位置作为采样结果的过程.3.3.3㊀噪声模型噪声在图像上常表现为一些引起较强视觉效果的像素点或像素块.在电子网络中,通信信道可能受到来自许多自然源的宽带高斯噪声的影响,例如导体中原子的热噪声㊁散粒噪声㊁起伏噪声㊁来自太阳等天体的宇宙噪声等,这些噪声对于影响仿真的影响,在概率上符合高斯分布,所以使用高斯噪声对这些扰动进行模拟.以z作为噪声值,则噪声在模拟图像上的分布符合公式(10):p(z)=12πe-(z-z-)2/2σ2.(10)3.3.4㊀量化模型实际地物根据地物的物理特性拥有不同的辐照度,在传感器内部的辐射强度是一条连续的曲线.模拟图像经过采样后,在时间和空间上离散化为像素.但采样所得的像素值仍是连续量.量化模型把现实空间场景数据的灰度数据进行了离散化操作.3.3.5㊀信号转换传输模型空间光学相机获得的地面地物几何与辐射信息,在相机内部被编码成二进制数值,以电子脉冲的形式进行传输和保存,因此就会不可避免地面对信号转换与传输中的误码率问题.假定误码的分布服从高斯分布,对于影像仿真中的二进制数据流,为添加高斯白噪声进行误码的模拟,建立信号转换的传输模型,如式(11)所示:f(x)=12πσe-(x-x-)2/2σ2.(11)4㊀仿真结果与分析4.1㊀软件实现及调试基于仿真系统需要良好的人机交互界面㊁好的扩展性和复用性㊁仿真卫星实时运行状态以及0811㊀㊀㊀㊀液晶与显示㊀㊀㊀㊀㊀㊀第35卷㊀火星表面具体细节仿真的要求,仿真系统采用分布式技术,分为3个模块独立进行开发.通过V i s u a l S t u d i o 2017实现系统的人机交互界面以及系统各模块间的通讯功能;使用S T K 实现地物环境创建模块中二维与三维图像信息的更新功能;使用S T K 与O S G 实现相机光学图像仿真生成模块中对火星二维三维影像生成㊁卫星运行轨迹展示㊁火星表面具体细节生成以及仿真图像进行退化影响的功能.软件的整体实现框图以及功能如图3所示.图3㊀软件实现框图F i g .3㊀B l o c kd i a gr a mo f s o f t w a r e r e a l i z a t i on 图4㊀仿真软件系统调试F i g .4㊀D e b u g g i n g o f s i m u l a t i o n s o f t w a r e s ys t e m 软件的系统调试使用3台设备进行仿真验证.如图4所示,最左边的是地检设备,用于发送指令;中间是主控模拟模块,用于接收地检平台发送的指令,并转发数据给相机光学仿真图像生成模块;最右侧是相机光学仿真图像生成模块,模块接收姿轨参数及控制命令后,根据接收到的信息实时生成星下点对应的图像,在模块中进行展示.4.2㊀仿真实验结果图5是主控模拟模块,可以控制1553B ㊁R S 422总线以及网络通讯的开关状态.通过1553B 接收地检平台发送的指令,通过R S 422总线接收G N C 平台广播的参数,进行实时像移补偿计算,并将偏流角的计算结果反馈给G N C 平台,使其调整参数.主控模拟模块还可以将像移补偿参数(如行频㊁级数㊁增益等调光参数)通过R S 422总线传递给相机光学仿真图像生成模块,使其调整生成的图像.图5㊀主控模拟模块F i g.5㊀M a s t e r s i m u l a t i o nm o d u le 图6㊀仿真成像软件效果F i g .6㊀S i m u l a t i o n i m a g i n g so f t w a r e e f f e c t 图6是相机光学仿真图像生成模块效果图.S T K 使系统具有仿真火星表面二维㊁三维图形㊁卫星实时运行轨迹以及传感器推扫区域的功能.图中左上角位置是火星表面三维图形,红线是卫星的绕火星运行轨道,绿色区域是该时刻卫星传感器推扫到的地点;左下角是火星表面二维图形,图中的红线是卫星在火星轨道的运行轨迹.右侧1811第11期㊀㊀㊀㊀㊀㊀㊀樊金鹏,等:空间光学相机成像仿真系统设计与实现图像是O S G 中进行建模渲染的火星表面具体细节,使用O S G 预先创建丰富的成像影响模型,仿真复杂的影响因素对成像过程的影响.随着左侧二维㊁三维图像中卫星的运动,右侧O S G 生成的火星表面细节也会发生变化,生成新的仿真图像,实现了空间光学相机在轨运行工作状态的仿真.图7是不同时刻仿真产生的图像结果.图7㊀不同时刻仿真生成结果F i g.7㊀S i m u l a t i o n r e s u l t s a t d i f f e r e n tm o m e n ts 图8㊀原图与添加退化模型效果对比F i g .8㊀C o m p a r i s o n o ft h eo r i g i n a li m a gea n dt h e i m a g e a d d i n g ad e g r a d a t i o nm o d e l 4.3㊀部分成像影响模型效果相机光学仿真图像生成模块中可以对仿真生成的图像选择添加退化模型.通过在软件中选取影响模型,调用O S G 中封装的相对应的成像影响模型,对生成的图像添加相对应的退化模型.图8左图是未添加退化模型的原图,右图是添加退化模型之后的仿真结果.图9左侧是添加偏流角为30ʎ的像移影响模型之后的仿真结果,添加像移影响之后出现了一个运动的模糊,右侧是像移补偿之后的结果.图10是不同太阳高度角对成像效果的影响结果,左图是太阳高度角为30ʎ时的影响效果,右图是太阳高度角为50ʎ时的影响效果,太阳高度角低时,图像更暗,高度角高时图像较亮.多种仿真影响模型可以满足空间光学相机实际在轨工作所遇到的复杂情况.图9㊀像移对图像像质的影响F i g .9㊀I n f l u e n c e o f i m a g e s h i f t o n i m a g e q u a l i ty图10㊀不同太阳高度角对成像效果影响F i g .10㊀I n f l u e n c eo f d i f f e r e n t s o l a r a l t i t u d ea n gl eo n i m a g i n g ef f e c t 5㊀结㊀㊀论本文针对空间光学相机日益复杂的地面仿真测试需求,对多种成像影响模型进行了研究,开发了基于S T K 与O S G 的分布式空间光学相机成像仿真系统.多种图像退化模型可以满足复杂条件下相机的成像效果仿真;O S G 开源库的使用使得系统拥有良好的可扩展性;分布式技术的采用使系统拥有良好的复用性.通过实际火星探测项目2811㊀㊀㊀㊀液晶与显示㊀㊀㊀㊀㊀㊀第35卷㊀应用,证明了该系统可以为空间光学相机地面验证提供一个良好的仿真环境,为空间光学相机的设计优化提供一定的参考.下一步将结合光学仿真软件,更准确地分析整个光学系统的调制传递函数,建立更加精确的影响模型.参㊀考㊀文㊀献:[1]㊀胡君,王栋,孙天宇.现代航天光学成像遥感器的应用与发展[J ].中国光学与应用光学,2010,3(6):519G533.HUJ ,WA N GD ,S U NTY.A p p l i c a t i o n a n d d e v e l o p m e n t o f r e c e n t s p a c e o p t i c a l i m a g i n g re m o t e s e n s o r s [J ].C h i Gn e s eJ o u r n a l of O p t i c s a n dA p p l i e dO pt i c s ,2010,3(6):519G533.(i nC h i n e s e )[2]㊀贾平,张葆.航空光电侦察平台关键技术及其发展[J ].光学精密工程,2003,11(1):82G88.J I A P ,Z HA N GB .C r i t i c a l t e c h n o l o g i e s a n d t h e i r d e v e l o p m e n t f o r a i r b o r n e o pt o Ge l e c t r o n i c r e c o n n a i s s a n c e p l a t f o r m s [J ].O p t i c s a n dP r e c i s i o nE n g i n e e r i n g ,2003,11(1):82G88.(i nC h i n e s e )[3]㊀王慧,刘薇,于建冬,等.航天光学相机几何参数星上监测技术[J ].光子学报,2018,47(10):1012001.WA N G H ,L I U W ,Y UJD ,e t a l .G e o m e t r i c p a r a m e t e r sm o n i t o r i n g t e c h n o l o g y f o r s p a c e o pt i c a l c a m e r a [J ].A c t a P h o t o n i c aS i n i c a ,2018,47(10):1012001.(i nC h i n e s e)[4]㊀杨永彬.空间光学相机调焦技术研究[J ].航天器工程,2011,20(2):20G24.Y A N G YB .S t u d y o n f o c u s i n g t e c h n i q u e f o r s p a c e o p t i c a l c a m e r a [J ].S p a c e c r a f tE n g i n e e r i n g ,2011,20(2):20G24.(i nC h i n e s e)[5]㊀王战,韩诚山,黄良,等.航天相机1553B 总线仿真测试软件设计[J ].计算机应用,2015,35(S 1):199G202.WA N GZ ,HA NCS ,HU A N GL ,e t a l .D e s i g no f s i m u l a t i o ns o f t w a r e f o r 1553Bb u so f a e r o s pa c e c a m e r a [J ].J o u r n a l o f C o m p u t e rA p pl i c a t i o n s ,2015,35(S 1):199G202.(i nC h i n e s e )[6]㊀许志涛,龙科慧,刘金国,等.空间相机调焦机构精度检测系统设计[J ].液晶与显示,2013,28(6):943G947.X UZT ,L O N G K H ,L I UJG ,e t a l .D e s i g no f f o c u s i n g m e c h a n i s ma c c u r a c y d e t e c t i o ns y s t e mo f s pa c e c a m e r a [J ].C h i n e s eJ o u r n a l o f L i q u i dC r y s t a l s a n dD i s p l a ys ,2013,28(6):943G947.(i nC h i n e s e )[7]㊀张敏,金龙旭,李国宁,等.基于T D I C C D 空间相机图像模拟源系统设计[J ].液晶与显示,2016,31(2):208G214.Z HA N G M ,J I NLX ,L IG N ,e t a l .D e s i g no f i m a g e s i m u l a t i o ns y s t e m o fT D I C C Ds pa c ec a m e r a [J ].C h i n e s e J o u r n a l o f L i q u i dC r y s t a l s a n dD i s p l a y s ,2016,31(2):208G214.(i nC h i n e s e )[8]㊀程军,张伟,鲍文卓,等.在轨光学相机探测图像数字仿真系统的设计与实现[J ].光学精密工程,2009,17(9):2136G2144.C H E N GJ ,Z HA N G W ,B A O W Z ,e t a l .D e s i g n a n d i m p l e m e n t a t i o n o f d i g i t a l s i m u l a t i o n s y s t e mf o r d e t e c t i n gi m Ga g e o f o r b i t i n g o p t i c a l c a m e r a [J ].O p t i c s a n dP r e c i s i o nE n g i n e e r i n g ,2009,17(9):2136G2144.(i nC h i n e s e )[9]㊀曹小涛,徐抒岩,赵运隆.空间相机连续调焦地面仿真测试系统设计[J ].液晶与显示,2011,26(3):409G412.C A O XT ,X USY ,Z HA O YL .D e s i g no f s i m u l a t i o n a n dd e t e c t i o n s y s t e mf o r s pa c e c a m e r a c o n t i n u o u s f o c u s a d Gj u s t m e n t s y s t e m [J ].C h i n e s eJ o u r n a l o f L i q u i dC r y s t a l s a n dD i s p l a y s ,2011,26(3):409G412.(i nC h i n e s e )[10]㊀冯蕊,孟新,潘忠石,等.基于H L A 的空间光学探测仿真系统设计[J ].计算机工程与设计,2010,31(6):1335G1338.F E NG R ,M E N G X ,P A NZS ,e t a l .D e v e l o p m e n t o f s p a c eo p t i c a l d e t e c t i o ns i m u l a t i o ns y s t e m b a s e do nH L A [J ].C o m p u t e rE n g i n e e r i n g a n dD e s i gn ,2010,31(6):1335G1338.(i nC h i n e s e )[11]㊀许兴星,丁雷.基于O pe n G L 的星载可见光相机成像仿真系统[J ].红外,2017,38(7):15G21.X U XX ,D I N GL .S p a c e b o r n e v i s i b l e l i g h t c a m e r a i m a g i n g s i m u l a t i o ns y s t e mb a s e do nO p e n G L [J ].I n fr a r e d ,2017,38(7):15G21.(i nC h i n e s e)[12]㊀张欣光,刘芸,唐硕,等.基于S T K 的卫星视景仿真软件的设计与实现[J ].飞行器测控学报,2011,30(4):73G76.Z HA N G X G ,L I U Y ,T A N GS ,e t a l .D e s i gna n d r e a l i z a t i o no f S T K GB a s e dv i s u a l i z a t i o ns i m u l a t i o ns o f t w a r e f o r s a t e l l i t e s [J ].J o u r n a l o f S p a c e c r a f tT T &CT e c h n o l o g y ,2011,30(4):73G76.(i nC h i n e s e )[13]㊀李明譞,江刚武,张锐,等.航天光学遥感成像半实物仿真系统研究[J ].激光与红外,2017,47(5):617G623.L IM Y ,J I A N GG W ,Z HA N GR ,e t a l .R e s e a r c h o nH I Ls i m u l a t i o n s y s t e mf o r s p a c e o p t i c a l r e m o t e s e n s i n gi m Ga g i n g [J ].L a s e r&I n f r a r e d ,2017,47(5):617G623.(i nC h i n e s e )[14]㊀张刘,孙秋香,金光.星载T D IC C D 相机成像仿真系统的实现[J ].空间科学学报,2010,30(1):91G96.3811第11期㊀㊀㊀㊀㊀㊀㊀樊金鹏,等:空间光学相机成像仿真系统设计与实现Z HA N GL ,S U N Q X ,J I N G.D e v e l o p m e n t o fT D IC C Dc a m e r a i m a g e s i m u l a t o r [J ].C h i n e s eJ o u r n a l o f S pa c e S c i e n c e ,2010,30(1):91G96.(i nC h i n e s e)[15]㊀王战.颤振对星载T D I C C D 相机成像质量的影响分析[D ].长春:中国科学院长春光学精密机械与物理研究所,2014.WA N GZ .P l a t f o r m j i t t e r e f f e c t o n i m a g e q u a l i t y o f s p a c e b o r n eT D I C C Dc a m e r a [D ].C h a n g c h u n :C h a n gc h u n I n Gs t i t u t e o fO p t i c s ,F i n eM e c h a n i c s a n dP h y s i c s ,C h i n e s eA c ade m y of S c i e n c e s ,2014.(i nC h i n e s e )[16]㊀阮宁娟,庄绪霞,李妥妥,等.空间光学遥感系统全链路仿真与分析[J ].航天返回与遥感,2013,34(6):36G43.R U A N NJ ,Z HU A N G XX ,L IT T ,e t a l .E n dt oe n ds i m u l a t i o na n da n a l y s i so f s p a c eo p t i c a l r e m o t e s e n s i n gs y s t e m [J ].S p a c e c r a f tR e c o v e r y &R e m o t eS e n s i n g ,2013,34(6):36G43.(i nC h i n e s e )作者简介:㊀樊金鹏(1993-),男,浙江绍兴人,硕士研究生,2016年于天津大学获得学士学位,主要从事计算机仿真技术方面的研究.E Gm a i l :1224840587@q q.c om ㊀姬㊀琪(1978-),男,山西太原人,硕士,副研究员,2007年于中国科学院研究生院获得硕士学位,主要从事计算机仿真技术㊁光电设备精密检测及仿真技术方面的研究.E Gm a i l :j i q i @c i o m p.a c .c n4811㊀㊀㊀㊀液晶与显示㊀㊀㊀㊀㊀㊀第35卷㊀。
浅谈视频图像序列运动目标的检测方法
摘要 : 视 频 图像 序列运动 目标检测是计算机视 觉研 究的重要组成部 分, 广泛应 用于交通、 医学等领域。文章主要论述 了 常用的三种检 测方法 : 帧间差分 法、 背景减法 、 光 流法。
关键 词 : 运 动 目标 检 测 ; 帧 间差 分 法 ; 背景 减 法 ; 光 流 法
中图分 类号 : T P 3 9 1 . 4 1
f n n
的 结果D进行二值化处理, 定 义为: = { 【 l/ 二 、 、 : , 其中6 为二
.
J £ 0
值化 的分割 阈值 , d为二值化后差分图像。 当差阈值 d时,即认为该像素 为运 动 目标 中的某一像素 , 令 d值 为 1 , 反之则认为 该像 素为 背景 中的某 像素 , 令 d值为 0 。
文献标识码 : A
文章编号 : 1 6 7 3 . 1 1 3 1 ( 2 0 1 3 ) 0 3 . 0 0 4 5 . 0 1 建立与真实背景相近 的背景模 型 ( 也被称为背景建模) , 它是背景减法 的核 心, 其 目的是对视频序列图像进行训练, 提 取 出背景 图像 , 建立背景模型 , 用于后续检测 。背景建模 的方 法很多 , 如: 基于像素信息 的背景建模法有均值滤波法 , 基于 偏微分方程 的背景重构和运动检测法 ,基于高斯分布 的背景 模型法和基于柯西分布 的背景模 型法等等 。背景建模 的方法 不 同,得到的背景减法也不 同。最简单 的背景减法是均值背 景减法和 中值背景减法 ,它们都是基于对视频 图像序列统计 分析 的背景建模法得到 的。 背景减法不受运动 目标速度 的限制 ,能够较完整地提取 运动 目标点 , 却对 外部环境 ( 如光照等) 变 化太 过敏 感, 鲁棒性 差 ,检测性能与背景建模的好坏密切相关 。由于背景可能发 生变化 , 所以要不断地更新背景, 程序设计的算法复杂度较高。 I . 3 光流 法 光流是 图像亮度 的运动信息描述 。光流法基于视频 图像 序列 中运动 目标随时间而变化的光流矢量特性 ,对 图像的运 动场进行估计 , 将相似运动 矢量合 并, 从而分离 出运动 目标和 背景, 检测到运动 目标 。 光流法主要包括两种:连续光流法和特征光流法。其中 连续光流法中光流的计算是基于梯度的,最为经典的算法是 L - K( L u c a s &K a n a d e ) 和 H- S ( Ho m&s c h u n c k ) 方法: 特征光流法 中光流的计算是基于特征匹配或区域匹配的 。 光 流 法 的 优 点 是 不 需 要 预 先 知 道 任 何 的 场 景 信 息 , 即 不 论摄像 机是否运动, 都可 以检测 出运动 目标 , 这是因为它采用 的是运动 目标随时间变化的光流矢量特性;缺点是虽然能够 直接用于摄像机运动下的 目标检测,但 是大多数光流法的计 算复杂, 计算量大 , 抗噪性差, 不适于实时处理 。
天基空间目标成像仿真系统设计与实现
国 防科 学 技 术 大学 自动 目标 识 别 重 点 实 验 室 , 湖南 长 沙 4 1 0 0 7 3 摘 要 设 计 了一 个 基 于 可 见 光 成 像 并 针 对 空 间 点 目标 的天 基 空 间 目标 成 像 仿 真 系 统 。分 析 了天 基 空 间 目标 探 测 成 像
f o r s pa c e po i nt t a r g e t . The s pac e —ba s ed t a r g e t d e t e c t i o n i m ag i ng pr oc e s s i s a na l yz e d. The i ma g i ng s i mu l a t i on pr o ce s s
激 光 与 光 电 子 学 进 展
5 2 ,1 1 1 1 0 1 ( 2 0 1 5 )
L a s e r & 0p t 0 e 1 e c t r o n i c s Pr o g r e s s
 ̄2 0 1 5  ̄ 中 国激 光 》 杂 志 社
天 基 空 间 目标 成 像 仿 真 系统 设 计 与 实 现
a s r e c t a ngl e s ,c y l i nde r s a nd s phe r es . The c onc e pt o f t ar ge t opt i c al c r os s s e c t i o n i s pr o pos e d r e f e r e nc e f or r ada r c r os s
的过 程 , 据此 将 成 像 仿 真 过 程 分 为轨 道 仿 真 、 恒 星 背景 成 像 仿 真 、 目标 成 像 仿 真 及 电荷耦 合 器 件 ( C C D ) 传 感 器 系 统 仿 真
空间目标探测的成像技术研究
空间目标探测的成像技术研究随着太空技术的不断进步,空间探索的领域也愈加广泛,尤其是空间目标探测技术正逐渐成为人们研究的热点之一。
空间目标探测包含了包括行星、卫星、小行星和彗星等在内的各种天体的观测、探测和研究。
这其中,成像技术在空间目标探测中扮演着非常重要的角色,它不仅可以为我们提供海量的图像数据,还能让我们更加深入地了解空间目标的性质和特征。
一、空间目标探测的重要性空间探测技术在现代科学和技术中扮演着非常重要的角色。
我们已经进行了大量的探测任务,成功地发现了我们周围没有被接触的区域,也有了更多关于太阳系的了解。
通过探测和观察,我们可以清楚地看到行星、卫星、小行星和彗星等区域的形态、构造和特征。
我们可以通过对着心的研究来更好地了解宇宙规律以及人类和生命在宇宙中的定位。
二、空间目标探测的成像技术为了更好地进行空间目标探测,使用成像技术进行探测是必不可少的。
利用成像技术,可以清晰、准确地定位空间目标,获取更多的图像数据,在不同的方向、角度观测空间目标以及对不同的物理现象进行研究。
目前,成像技术主要有以下几种:1、相机成像相机成像是最常见的成像技术,它可以捕获目标的图像并将其存储在设备内部的存储介质中。
在空间探测中,相机成像通常采用数字相机或光电转换器来转换光信号,然后将其变成数字信号。
相机成像具有成本低、易于维护和操作、成像质量较高等优点,但它的一些缺点也比较明显,比如相机成像只能在光线条件良好的情况下工作,并且需要足够的充电时间。
2、激光雷达激光雷达利用激光发射器发射激光束,照射到目标物上后,利用微弱反射光信号来确定目标物的位置和距离,并生成对应的二维或三维图像。
激光雷达成像技术具有良好的遥感能力、高精度、高精度等优点,适用于各种天气条件和光照条件,但是成本比较高,同时还受制于目标物的反射率和视角等因素。
3、红外成像红外成像技术可以在夜间或黑暗中也能实现目标物的图像捕捉,它通过感知目标物辐射出的红外辐射来完成成像过程。
一种空间机动目标成像方法
一种空间机动目标成像方法引言随着空间技术的发展,地球上的空间机动目标的成像需求越来越重要。
传统的成像方法在处理空间机动目标时遇到了困难,因为机动目标的快速运动导致图像模糊和失真。
本文将介绍一种新的空间机动目标成像方法,通过利用高速相机和目标预测算法,能够高效地成像空间机动目标。
方法概述本方法主要包括三个步骤:目标运动预测、图像采集和图像处理。
首先,通过目标运动预测算法,预测出目标在未来一段时间内的位置和速度。
然后,利用高速相机对目标进行连续采集,获取多个瞬时图像。
最后,通过图像处理算法将多个瞬时图像拼接成一个清晰的完整图像。
目标运动预测目标运动预测是本方法的关键步骤。
通过分析目标的历史运动轨迹和当前速度,可以预测出目标在未来一段时间内的位置。
常用的目标运动预测算法包括卡尔曼滤波和粒子滤波等。
这些算法可以根据目标的加速度和速度信息,估计目标的位置,从而指导后续的图像采集和图像处理。
图像采集图像采集是通过高速相机对目标进行连续采集,获取多个瞬时图像。
由于空间机动目标的快速运动,传统的相机无法满足对目标运动的准确采集需求。
因此,本方法使用高速相机,能够在很短的时间内连续拍摄多张图像。
通过调整相机的快门速度和曝光时间,可以适应不同目标的运动速度。
图像处理图像处理是将多个瞬时图像拼接成一个清晰的完整图像的过程。
首先,通过图像对齐算法,对多个瞬时图像进行校正,使得它们在同一空间坐标中对齐。
然后,通过图像融合算法,将多个瞬时图像的信息融合在一起,生成一个清晰的完整图像。
最后,通过去噪算法和增强算法,进一步优化图像的质量和清晰度。
实验结果本方法在实际应用中取得了较好的效果。
通过对多个空间机动目标的成像实验,验证了本方法的准确性和效率。
实验结果显示,通过目标运动预测和高速相机的结合,能够高效地获取清晰的空间机动目标图像,有效解决了传统方法在处理空间机动目标时遇到的问题。
结论本文介绍了一种新的空间机动目标成像方法,通过目标运动预测、图像采集和图像处理三个步骤,能够高效地成像空间机动目标。
一种空间观测图像的仿真生成方法
一种空间观测图像的仿真生成方法
张健;娄树理;任建存
【期刊名称】《电光与控制》
【年(卷),期】2014(000)011
【摘要】提出一种天基观测空间目标可见光图像仿真方法,观测平台及目标的运
行速度和空间位置信息由卫星工具包( STK)生成,成像过程由Matlab编程实现。
该方法的优越性在于利用STK的可视化功能,控制观测平台和目标的轨道参数,
使目标能够进入观测相机的视场,而Matlab具有强大的图像处理函数库,在序列图像生成过程中,可方便地对图像添加各类噪声和效应,使图像更加真实;生成的仿真图像主要用于空间目标检测算法的研究。
最后分析了仿真图像中空间目标和恒星的运动性质,为完善空间目标检测算法的性能提供了依据。
【总页数】6页(P18-23)
【作者】张健;娄树理;任建存
【作者单位】海军航空工程学院控制工程系,山东烟台 264001;海军航空工程学
院控制工程系,山东烟台 264001;海军航空工程学院控制工程系,山东烟台264001
【正文语种】中文
【中图分类】V271.4;TP391.9
【相关文献】
1.灰度/深度图像序列的三维空间内插——一种新的计算机图像生成技术 [J], 王新成
2.一种基于目标提取的空间观测图像预处理算法 [J], 王学伟;张健
3.空间观测序列图像目标运动成像仿真 [J], 陈维真;张春华;王学伟;周晓东
4.空间目标图像观测系统设计仿真研究 [J], 刘伟;门金瑞;华园园
5.一种二维图像序列的深度图像生成方法 [J], 罗莎莎;郭太良
因版权原因,仅展示原文概要,查看原文内容请购买。
基于序列图像的运动目标检测新算法
基于序列图像的运动目标检测新算法
闫可平;陈洪亮;文海龙;李建勋
【期刊名称】《电光与控制》
【年(卷),期】2017(024)006
【摘要】基于SURF帧间配准和运动历史图像构建,提出了一种基于序列图像的运动目标检测新方法.针对运动检测容易出现虚警的情况,结合多帧关联思想和碰撞检测理论提出多帧碰撞检测算法,以剔除虚假运动目标.在标准测试集上测试序列仿真验证,结果表明,该运动目标检测算法具备较高的查全率以及极高的检测精度和极低的虚警率.
【总页数】6页(P8-12,27)
【作者】闫可平;陈洪亮;文海龙;李建勋
【作者单位】成都飞机设计研究所,成都610091;中国航空工业集团公司洛阳电光设备研究所,河南洛阳471000;上海交通大学,上海200240;上海交通大学,上海200240
【正文语种】中文
【中图分类】V249.2
【相关文献】
1.基于光照不变性模型的运动目标检测新算法 [J], 石贵民
2.基于新的帧间差分运动目标检测算法 [J], 严金果;徐蔚鸿
3.基于一种新的Snake模型的序列图像边缘提取算法 [J], 马建林;崔志明;张娜敏;
吴健;孙晓平
4.一种新的基于三维小波变换的序列图像编码算法 [J], 何同林;尤春艳;郑鹏
5.基于相位相关的指纹序列图像配准新算法 [J], 翁阳;程明
因版权原因,仅展示原文概要,查看原文内容请购买。
基于有限线积分变换的序列图像运动目标检测
基于有限线积分变换的序列图像运动目标检测宋芳琴【摘要】运动目标检测主要是从序列图像中将变化区域从背景中分割出来,它影响着运动目标能否正确地分类和跟踪.因此,运动目标检测是智能视频监控技术中的关键问题之一.有限线积分变换(finite line integral transform,FLIT)作为近年来一种多尺度几何分析的新方法,能有效提取图像中的线性特征.检测方法是在FLIT的基础上再结合背景差法来实现的.具体而言,先对图像序列中的每帧图像(包括参考帧)作固定模板下的FLIT,再用当前帧的FLIT减去参考帧的FLIT,然后对不同方向提取的运动目标信息进行综合,最后采用数学形态学的相关处理来消除噪声.实验结果表明,使用该方法可以承受整体的或局部的、缓慢的或突变的光线变化,能有效地检测出运动目标.【期刊名称】《浙江科技学院学报》【年(卷),期】2014(026)001【总页数】5页(P30-34)【关键词】运动目标检测;有限线积分变换;背景差法;灰度图像【作者】宋芳琴【作者单位】绍兴职业技术学院信息工程学院,浙江绍兴312000【正文语种】中文【中图分类】TP391.41智能视频监控技术的研究是一个具有挑战性的前沿课题,涉及计算机科学、人工智能、机器视觉、图像工程、模式识别等多个学科[1]。
智能视频监控技术的研究包括对动态场景中的目标定位、目标识别和目标跟踪等,并在此基础上分析和判断目标的行为,获得对图像内容的理解及对客观场景的解释,从而对行动进行指导和规划[2-3]。
运动目标检测主要是从序列图像中将变化区域从背景中分离出来。
在进行运动检测时,常见的一种方法是摄像设备处于静止状态,而且镜头焦距也是固定的,此时,图像中的背景区域固定不动。
这种情况下通常使用以下3种方法进行运动检测:光流法[4]、相邻帧差法[5]、背景差法[6]。
光流法可以在不需要背景区域的任何先验知识情况下,就能够实现对运动目标的检测和跟踪,并且可以应用在摄像机运动的情况。
《光电成像系统数字建模虚拟仿真》实验指导书
《光电成像系统数字建模虚拟仿真》实验指导书一、实验任务当前,各种基于光电成像系统观测的总体设计中(对地观测、机载平台、舰载平台、车载平台等),对光电成像系统的性能要求不断提高,如何能在设计阶段得知其光电成像性能是提高光电探测系统性能的关键。
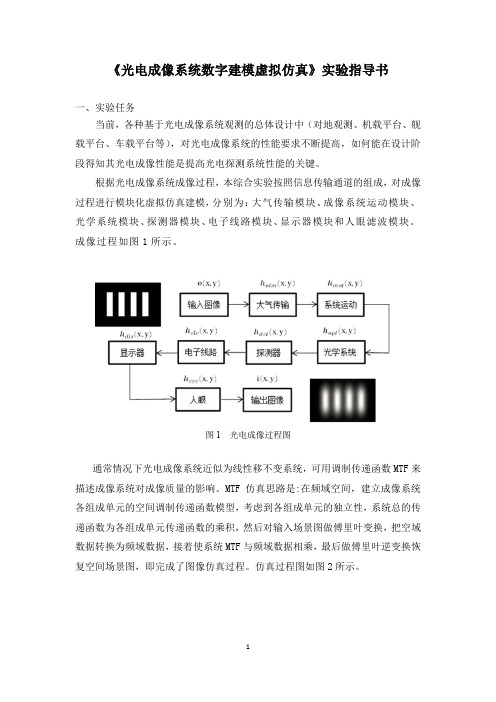
根据光电成像系统成像过程,本综合实验按照信息传输通道的组成,对成像过程进行模块化虚拟仿真建模,分别为:大气传输模块、成像系统运动模块、光学系统模块、探测器模块、电子线路模块、显示器模块和人眼滤波模块。
成像过程如图1所示。
图1 光电成像过程图通常情况下光电成像系统近似为线性移不变系统,可用调制传递函数MTF来描述成像系统对成像质量的影响。
MTF仿真思路是:在频域空间,建立成像系统各组成单元的空间调制传递函数模型,考虑到各组成单元的独立性,系统总的传递函数为各组成单元传递函数的乘积,然后对输入场景图做傅里叶变换,把空域数据转换为频域数据,接着使系统MTF与频域数据相乘,最后做傅里叶逆变换恢复空间场景图,即完成了图像仿真过程。
仿真过程图如图2所示。
图2 仿真过程图图像仿真从视觉的角度来评价成像系统的质量,为了对系统有一个客观的评价,本综合虚拟仿真实验又设计了系统综合评价指标MTF、NETD和MRTD,这样通过人眼主观感受和客观数据来综合评价系统成像质量。
二、实验目的根据光电成像过程,建立大气、成像平台的振动、光学系统、焦平面阵列、电子线路以及显示器和人眼对成像质量的影响方式和理论评价模型,设计成像系统性能评价指标MTF、NETD和MRTD计算算法。
三、实验要求根据光电成像系统的基本信息传递过程,结合影响成像质量的各个环节,完成了光电成像系统数字建模虚拟仿真设计。
设计的基本模块包括大气仿真模块、成像平台运动模块、光学系统模块、探测器模块、信号处理电路模块、成像系统噪声模块、显示器模块和人眼效应模块。
在总体性能评价指标方面采用系统调制传递函数MTF、噪声等效温差NETD和最小可分辨温差MRTD来评价成像系统综合性能指标。
运动目标激光主动成像系统MTF建模仿真
运动目标激光主动成像系统MTF建模仿真刘鹏;樊桂花;孙健;吴洋【摘要】According to the imaging principle of laser active imaging system and linear system theory,the MTF model of laser active imaging system for moving targets is established and simulated by using Matlab based on the general MTF model of electro-optical imaging system,and the MTF model considers the influence of atmosphere turbulence and motion on system imaging bined with the simulation results,the main factors that limit the system MTF and the effect of target motion are analyzed,which lays a theoretical foundation for the future evaluation and optimization of the system performance.%根据激光主动成像系统的成像原理和线性系统理论,在光电成像系统通用MTF模型的基础上,考虑了大气湍流和运动对系统成像性能的影响,建立了针对运动目标的激光主动成像系统MTF模型,并利用Matlab进行了仿真研究.结合具体的仿真结果,分析了限制系统MTF的主要因素以及目标运动的影响,为后续进行系统性能的评估和优化奠定了理论基础.【期刊名称】《激光与红外》【年(卷),期】2017(047)003【总页数】6页(P267-272)【关键词】激光主动成像系统;MTF;模型仿真;运动目标【作者】刘鹏;樊桂花;孙健;吴洋【作者单位】装备学院研究生院,北京101416;装备学院光电装备系,北京101416;装备学院研究生院,北京101416;装备学院研究生院,北京101416【正文语种】中文【中图分类】TN249建立准确合理的光电成像系统MTF模型,是进行系统设计和性能评估的前提。
空间观测序列图像目标运动成像仿真
空间观测序列图像目标运动成像仿真陈维真;张春华;王学伟;周晓东【期刊名称】《激光与红外》【年(卷),期】2008(38)3【摘要】研究了空间观测序列图像目标运动性质仿真算法.首先,利用平均轨道根数(TLE)预测目标和搭载观测相机卫星在真赤道、平春分点(TEMED)坐标系的位置矢量,通过成像时相机与目标之间的几何关系对目标的运动性质进行了分析,同时对影响序列图像恒星位置的因素进行了分析;规范了成像定标中的星等与灰度的转换关系,用16bits灰度图像对星图进行仿真,扩大了星图的动态范围,提高了星图仿真的精度.最后,以搭载天基可见光探测器(SBV)的美国中段实验卫星轨道为载荷卫星运行轨道,对天基观测序列图像进行了仿真,结果表明本文给出仿真序列图像与美国公开发表的SBV相机拍摄图像基本一致.【总页数】4页(P300-303)【作者】陈维真;张春华;王学伟;周晓东【作者单位】中国海洋大学信息技术学院,山东,青岛,266000;海军航空工程学院控制工程系,山东,烟台,264001;海军航空工程学院控制工程系,山东,烟台,264001;海军航空工程学院控制工程系,山东,烟台,264001【正文语种】中文【中图分类】TP751【相关文献】1.由序列图像获取点目标的三维运动参数和空间位置 [J], 欧阳光辉;孙即祥2.基于特征点运动矢量估计的动态序列图像运动目标跟踪 [J], 黎宁;周建江;张星星3.基于目标可见光散射特性的空间目标成像仿真研究 [J], 黄建明;刘鲁江;王盈;魏祥泉4.天基系统空间目标光学成像仿真方法研究 [J], 闫立波;李建胜;黄忠义;王允华5.面向空间天文观测的序列图像无损压缩算法 [J], 孙建伟; 薛长斌; 郑铁; 张忠伟因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第38卷 第3期 激光与红外V o l.38,N o.3 2008年3月 L A S E R & I N F R A R E D M a r c h,2008 文章编号:1001-5078(2008)03-0300-04·图像与信号处理·空间观测序列图像目标运动成像仿真陈维真1,张春华2,王学伟2,周晓东2(1.中国海洋大学信息技术学院,山东青岛266000;2.海军航空工程学院控制工程系,山东烟台264001)摘 要:研究了空间观测序列图像目标运动性质仿真算法。
首先,利用平均轨道根数(T L E)预测目标和搭载观测相机卫星在真赤道、平春分点(T E M E D)坐标系的位置矢量,通过成像时相机与目标之间的几何关系对目标的运动性质进行了分析,同时对影响序列图像恒星位置的因素进行了分析;规范了成像定标中的星等与灰度的转换关系,用16b i t s灰度图像对星图进行仿真,扩大了星图的动态范围,提高了星图仿真的精度。
最后,以搭载天基可见光探测器(S B V)的美国中段实验卫星轨道为载荷卫星运行轨道,对天基观测序列图像进行了仿真,结果表明本文给出仿真序列图像与美国公开发表的S B V相机拍摄图像基本一致。
关键词:空间观测;星图模拟;星等;两行轨道根数中图分类号:T P751 文献标识码:AMo v i n g T a r g e t S i m u l a t i o n o f S p a c e O b s e r v a t i o n S e r i a l I m a g e sC H E NW e i-z h e n1,Z H A N GC h u n-h u a2,W A N GX u e-w e i2,Z H O UX i a o-d o n g2(1.O c e a n U n i v e r s i t y o f C h i n a,C o l l e g e o f I n f o r m a t i o nS c i e n c e&E n g i n e e r i n g,Q i n g d a o,266000,C h i n a;2.D e p a r t m e n t o f C o n t r o l E n g i n e e r i n g,N a v a l A e r o n a u t i a l a n dA s t r o n a u t i c a l U n i v e r s i t y,Y a n t a i264001,C h i n a)A b s t r a c t:Am e t h o d o f s i m u l a t i o nf o r s p a c e t a r g e t m o v i n g s i m u l a t i o nb a s e do ns p a c e-b a s e dc a m e r a i s p r e s e n t e d.T h eT L E s a r e u s e d t o p r e d i c t t h e r e l a t i v ep o s i t i o nv e c t o r b e t w e e nt h e t a r g e t a n dc a m e r a.F r o m t h e g e o m e t r i c p o s i t i o nt h ep a p e r a n a l y s i s m o v i n g c h a r a c t e r i s t i c s o f t h et a r g e t.A t t h es a m et i m e,f a c t o r sw h i c hc a ne f f e c t p o s i t i o n s o f t h ef i x e d-s t a r s a r e c o n s i d e r e d.T h e n,t h e s t a n d a r dt r a n s f o r m a t i o nb e t w e e n t h ep h o t o m e t r i cm a g n i t u d e s a n dt h e g r a y l e v e l i s p u tf o r w a r d.F i n a l l y,s u p p o s i ng th a t t h e o b s e r vi n g s a t e l l i t e o r b i t i s t h e s a m e a s t h e M S X,t h e a r t i c l e a n a l y z e s t h e m o v e m e n tc h a r a c t e r i s t i c s i n s e r i a l i m a g e s o f t h e t a r g e t.I t h a s b e e n p r o v e n t h a t t h e s i m u l a t ed se r i a l i m a g e s a r e of h igh a c c o r d a n c et o t h e S B Vo b s e r v a t i o n i m a g e s.K e y w o r d s:s p a c e o b s e r v a t i o n;s t a r i m a g es i m u l a t i o n;p h o t o m e t r i c m a g n i t u d e;t w o-l i n e e l e m e n t s(T L E)1 引 言空间目标观测可以在太空中近距离对空间目标进行监视、跟踪和识别,因而成为当前研究的热点。
美国第一个空间可见光探测器S B V于1996年发射升空,对于地球同步轨道带上卫星的监视[1],S B V 系统的观测能力就占到整个美国空间监视网观测能力的17.6%。
由S B V的成功经验引出了天基空间监视系统(S B S S),S B S S是由4~8颗L E O卫星组成的星座。
S B S S将使美国对地球静止轨道(G E O)卫星的跟踪能力提高50%。
此外,美国还将发展轨道深空成像仪(O D S I)系统,该系统为一高轨星座,能够对G E O进行特性识别。
加拿大国防部也启动了空间目标监视计划,主要用于跟踪地球同步轨道上通信卫星和其他高轨卫星[2]。
英国S U R R Y大学于2000年发射了实验小卫星,获得了空间目标的光学图像。
日本于2003年曾发射了空间垃圾回收卫星,具备空间观测能力。
德国波恩大学开展的空间监视有效载荷技术研究,已取得了丰富成果。
作者简介:陈维真(1960-),女,工程师,主要研究方向为信息处理等。
收稿日期:2007-09-06 本文研究了空间观测序列图像目标运动成像仿真算法。
首先,利用T L E 预测目标和相机在T E M E D 坐标系的位置矢量,通过成像时刻相机与目标之间的几何关系模拟目标在序列图像上的位置,同时对影响序列图像恒星位置的因素进行了分析;用16b i t s 灰度图像对星图进行仿真,扩大了星图的动态范围,提高了星图仿真的精度;以美国中段实验卫星(M S X )轨道为观测相机运行轨道对目标和恒星背景成像进行了仿真,将仿真结果与S B V 相机对G E O 目标观测序列图像进行比较,证明了仿真算法的有效性。
2 星空图像位置仿真2.1 目标位置仿真目标位置仿真的主要目的便是确定成像时刻目标在C C D 相机的位置信息。
在仿真成像的过程中,本文假设搭载成像相机的卫星(观测卫星)轨道为M S X 卫星运行轨道。
美国M S X 卫星的T L E [3]为:M S X1 23851U 96024A 07013.80469735 0.00000020 00000-0 14143-4 0 052 23851 99.0856 94.0821 0008000 63.3938 296.6061 13.97836579 00影响目标在空间观测序列图像中的位置的因素包括成像时刻相机与目标的相对距离、目标与相机的相对运动以及相机参数等。
序列图像目标位置仿真算法如下:(1)根据目标的T L E 轨道根数,利用S G P 4/S D P 4轨道预测器模型预测相机平台和目标的位置矢量R C C D 和R t a r g e t,进而得到两者的相对位置矢量R=R C C D -R t a r g e t。
国际上通用的轨道根数的表示方法为两行轨道根数(t w o -l i n ee l e m e n t s ,T L E ),北美防空司令部(N O R A D )开发了用于传输开普勒根数的T L E ,美国航天司令部(U S S P A C E C O M )计算了绝大多数公开的T L E ,由G o d d a r d 空间飞行中心(G S F C )发布。
U S S P A C E C O M 的简化常规&深空扰动的近似解析解模型———S G P 4/S D P 4[4]轨道预测器模型使用T L E 的解析法,可以获得精确的轨道预测,确定任何时刻卫星在T E M E D 坐标系的位置矢量和速度矢量。
(2)利用观测相机和目标的相对位置关系以及C C D 的指向信息模拟天基观测目标成像位置。
成像系统的坐标系定义为:C C D 焦平面中心为原点,相机视向为Z 轴,C C D 平面内任意方向为X方向,X 轴与Y 轴跟Z 轴构成右手坐标系。
坐标系确定以后,根据观测相机和目标的相对位置矢量便可以确定在成像时刻目标在C C D 焦平面上成像的位置参数。
观测相机和目标的几何关系如图1所示。
设成像时刻两卫星间距离矢量R 与Z 轴的夹角为α(α<90°),则:R ·Z = R Z c o s α(1)其中,Z 已知,R 可以通过步骤(1)得到。
经过目标作与Z 轴垂直的直线T P ,其在C C D 平面的成像为O S 。
设观测相机的角分辨率A R P ,则O S 的长度L O S (像素数)可以表示为:L O S =α/A R P (2)其中,L O S为目标在图像相对C C D 焦平面中心的位置。
2.2 恒星背景位置模拟由于恒星可以认为在距离观测卫星无穷远处,当观测相机的C C D 指向保持不变时,观测视场中恒星的位置是固定的,由于恒星距离遥远,相机位置的变化不会对恒星成像产生影响,影响恒星位置的主要因素包括如下两个:(1)相机视轴指向的变化。