鞋楦反求中的曲面光滑拼接算法
[集成]家当设计“犀牛rhino”软件里曲面对象的应用
![[集成]家当设计“犀牛rhino”软件里曲面对象的应用](https://img.taocdn.com/s3/m/f622f4cd29ea81c758f5f61fb7360b4c2e3f2aef.png)
曲面工具的使用扬帆工业设计软件培训
指定三或四个角建立曲面
以二、三或四个边缘曲线建立曲面
以平面曲线建立曲面
所有构成曲面的线或边必须在同一平面上并且封闭
矩形平面:角对角
直线挤出:默认不加盖(实体工具集里的与其作用相同,默认加盖)
放样曲线成面
两端可以有实点参与
标准、松弛、紧绷、平直区段
封闭放样:至少要有3条断面曲线
不要简化:使用原始断面曲线
重建点数:设置点的数量改变断面形状,点数越少断面越简单
从网线建立曲面
边线只能为2、3或4条,且结构线的端点不能接在边线的端点上
必须先选取边线,再选取的结构线
当选取的某条边线为其他曲面边缘时,此边“相切”和“曲率”选项开启,可以控制连续性。
嵌面
曲面的U、V方向跨度数:数据越大越生成的曲面精细,但也会更复杂。
硬度:数据越大,整个曲面越趋于平面
调整切线:使生成的曲面的边缘与邻近曲面平滑过渡
单轨扫掠
连锁边缘:选取连贯的多条线或边为路径
封闭扫掠:当路径为封闭曲线,且有2个或2个以上截面曲线时才可开启
双轨扫略
旋转成形/ 沿路径旋转
在物件上产生布帘曲面
以图片灰阶高度
根据图片的灰阶深度生成凹凸面。
鞋楦逆向工程作业

逆向工程技术实训说明书设计题目: 鞋楦指导老师: 杨长辉姓 名: 龚元华专 业: 机械设计学 号: 11004020405学 院: 机械工程学院中 国 重 庆2013年 11月前言逆向工程基本介绍逆向工程(Reverse Engineering)这一术语起源于20世纪60年代,但对它从工程的广泛性去研究,从反求的科学性进行深化还是从20世纪90年代初刚刚开始.反求工程类似于反向推理,属于逆向思维体系.它以社会方法学为指导,以现代设计理论,方法,技术为基础,运用各种专业人员的工程设计经验,知识和创新思维,对已有的产品进行解剖,分析,重构和再创造,在工程设计领域,它具有独特的内涵,可以说它是对设计的设计。
反求工程技术是测量技术,数据处理技术,图形处理技术和加工技术相结合的一门结合性技术.随着计算机技术的飞速发展和上述单元技术是逐渐成熟,近年来在新产品设计开发中愈来愈多的被得到应用,因为在产品开发过程中需要以实物(样件)作为设计依据参考模型或作为最终验证依据时尤其需要应用该项技术,所以在汽车,摩托车的外形覆盖件和内装饰件的设计,家电产品外形设计,艺术品复制中对反求工程技术的应用需求尤为迫切。
反求工程是将数据采集设备获取的实物样件表面或表面及内腔数据,输入专门的数据处理软件或带有数据处理能力的三维CAD软件进行处理和三维重构,在计算机上复现实物样件的几何形状,并在此基础上进行原样复制,修改或重设计,该方法主要用于对难以精确表达的曲面形状或未知设计方法的构件形状进行三维重构和再设计。
目录第一节、设计题目 (4)第二节、点云的处理 (5)第三节、鞋楦底部的设计 (6)第四节、腰帮的设计 (11)第五节、前帮的设计 (12)第六节、后帮的设计 (13)第七节、楦头顶部的设计 (14)第八节、边界曲线的处理 (17)第九节、后处理 (18)第十节、鞋楦逆向设计所得图 (21)第一节、设计题目鞋楦第二节、点云的处理测量数据如果以点的形式来显示时,较不易判断对象的外观特征。
双三次有理Bezier曲面G 2光滑拼接算法
( ol eo te t s n c ne E s C ia Istt o eh oo yF zo 3 0 0 C l g f e Ma mai dS i c ,at hn ntue f c n l ,u hu 4 0 ) h ca e i T g
பைடு நூலகம்
1 ( , = / ( , + 0r( , 0 ) 0r 1 ) 2f 1 ) 2 / i
【 +3r ( ,)+ ( ,)+ ( ,) ( ) / 1 1 1 3
了具 有 公共 边 界 曲线 的两 张双 三 次有 理 B z r ei 曲 e 面G 光滑 拼接 条 件 , 到 了 相 应 控 制顶 点 、 系 得 权
对 于非有 理形式 的许 多性 质和计 算技 术 , 很容 易推
广 到 有 理 的形 式 。 因 此 , 为 N R S曲 面 的 特 作 U B 例, 有理 B z r ei 曲面在 C D C M领 域 和 C G e A /A A D及 相关 领域 中获得 了广泛 的研究 与应用 。
K y w o ds r t n lBe irs ra e , e r aoa i ze u c s G c n iu t f ot i n y,n n—u i r ai n lB —s l e s r c o nfm rt a o o p i u a e,weg t n f i h
维普资讯
总 第 23期 2
计算 机与数字工程
Co u e mp t r& Diia gtlEngn e i g ie rn
Vo . 6 No 5 13 . 1 9
20 0 8年第 5期
双 三次 有 理 B z r曲面 G ei e 2光 滑 拼接 算 法
曲面展平算法在鞋样设计中的应用
复 杂 曲面 的可 展性及 其展平 问题 ,一直 受到
工程界 以及计算 机辅 助设 计技术 领域 界 的关注 。 曲面 的展平在 板料 塑性成 形 , 飞机 、 车和服 装 、 汽 玩 具 的设 计制造 领域 中有着 广泛 的应 用 。
鞋楦是鞋子的母体 , 楦体似脚而并非脚的简 单重 复 ,其 设计 是依据 脚型 规律 ,在科 学 的基 础 上加 以美化 和 艺术 化处 理得 到 的。显而 易见 ,鞋
b u d r n e t g t e c o e e i n r g d a o t y s wi g l e . isl, i i e t e s o s o n a y a d g t n l s d r g o n e b u e n i s F r t d v d h h el t i h i b n y a
s ra e i t ra gu a s e .S c n l ,r c r e ta e s d tin l s e y s wi g ln s u f c n o tin lrme h s e o d y e o d t r v r e ra gu a me h sb e n i e . h r
反求建模中常见二次曲面拟合方法
反求建模中常见二次曲面拟合方法
田怀文;郭仕章
【期刊名称】《西南交通大学学报》
【年(卷),期】2007(042)005
【摘要】针对机械零件反求建模过程中常见二次曲面的表面重建问题,提出了曲面拟合分步计算法.该算法根据数字化离散点的三维坐标及各点的法矢量,利用零件表面的几何特征建立拟合计算目标函数,把二次曲面拟合问题转化为线性最小二乘计算问题;通过拟合计算提取曲面的几何参数,为建立机械零件实体及特征模型打下基础.
【总页数】5页(P553-557)
【作者】田怀文;郭仕章
【作者单位】西南交通大学机械工程学院,四川,成都,610031;西南交通大学机械工程学院,四川,成都,610031
【正文语种】中文
【中图分类】TP391
【相关文献】
1.人际沟通中常见的问题及解决方法较大标准较小全屏阅读分享到:更多 QQ
空间豆瓣搜狐微博网易微博百度搜藏谷歌书签人际沟通中常见的问题及解决方法 [J], 也可亚江买买提
2.浅析二次函数中常见的解题方法 [J], 宋艳林;
3.基于二次曲面拟合的机械模型交互式分割方法 [J], 吴仲琦; 郭建伟; 肖俊; 曾祥永;
王颖; 严冬明
4.利用离散平稳小波变换改进NURBS二次曲面拟合方法 [J], 田小强; 孔令富; 孔德明; 崔永强
5.例说数学建模教学中常见的数据预处理方法 [J], 李巧玲;张汉儒
因版权原因,仅展示原文概要,查看原文内容请购买。
曲面拼接方法
曲面拼接大作业姓名:孙令飞学号:0909101三维曲面的造型技术在模具造型、飞机、船舶、汽车以及的造型中得到了日益广泛的应用。
在曲面造型领域中, 工程技术界主要采用雍曲面、鹅曲面和双三次样条曲面。
其中的双三次样条曲面构造简单, 具有较好的连续性, 且是局部控制, 因此, 更为使用者所欢迎。
而本论文所采用的双样条曲面除了具有双三次样条曲面的优点外, 更加灵活, 放松了对曲面光滑性的要求, 在参数的特定取值下, 双样条曲面可以退化为一般的双三次样条曲面。
曲面造型中、进行不规则三维曲面的拼接是一个关键环节之二。
作为实用的曲面造型系统, 必须具有建立复杂曲面造型的功能, 对于一些复杂形状的产品, 虽然其外形是“浑然一体”的, 但是它的复杂性决定了它不可能由一张曲面构成, 一般要由几片甚至十几片大小不同的自由曲面拼接而成。
怎样把它们拼接得“天衣无缝” , 是一项艰巨的工作。
我们就曲面拼接问题进行了研究, 并以双样条曲面为例, 用语言开发了自由曲面造型系统衍。
比较理想地解决了自由曲面的造型问题。
这个系统对若干个双样条曲面的拼接做了尝试, 通过一些实例的考核, 得到了比较令人满意的结果1.直线拟合法:直线拟合法可分为两种:第一种是利用相邻的几个点进行拟合;第二种是同一行或列的点进行直线拟合。
由于镜头畸变等因素,网格图像中网格都会在一定程度上扭曲。
第一种方法能较好地保持镜头畸变模型,但在相邻几个点坐标值均异常条件下,矫正坐标能力下降,效率低。
同第一种方法相比,第二种方法效率高,鲁棒性强,对部分异常坐标具有较强的矫正能力,但会改变镜头畸变模型。
本文结合实际情况,选择第一种方法,分四段进行拟合直线。
三、小区域法。
小区域法是对区域内点的横坐标和纵坐标分别加权求和,所得值作为区域中心点的坐标。
该方法算法简单,易实现。
模板大小(区域大小)选择至关重要:太小则鲁棒性差;太大则破坏镜头畸变模型,未矫正图像边缘随之增宽。
另一个难点在于对各个相邻的检测点权值分配。
CAGD中参数曲面的光滑拼接研究
Kew rs P rmer ufc, emer o t ut ,mo t iig y od aa ti sraeG o ti cni i S ohj nn c c 造型应用 中, 由于客体 表面的复杂性 , 一般 用
一
多年来 , 随着 曲面设计 实际应用 的需 求 , 曲面 的几何连续
i u ft i ra fc hy o hsa e。 Th o g h h e d o ifr n o is p rm er u fcs t i a e n ls s te C 7s o h r u h t e tr a fdfee td man aa ti s ra e ,hs p p ra ay e h _ mo t c 4 .
摘 要 参数 曲面作为 C G A D中形状数 学描 述的标准形式一直 受到 关注, 而参数 曲面 的光 滑拼 接作 为实现复杂客 体 几何造 型的重要 手段 一直是该领域 的一 个热点和 难点问题。 以不 同参数域 的参数 曲面为线 索, 对常 用的矩形域 和三
角域参 数曲面的 G 光滑拼接的条件进行 了分析 , C1 同时对 这些 条件在 实际应 用 中的一些 问题 进行 了讨论 , 最后 对 曲
p r n a s f o l be t e mer d l g s ohj iigo aa ti s rae l y h tp t n i ot t a me n mpe o jc o ti mo ei ,mo t nn f rmer u fcsi a o c x g c n o p c s wa sa o s o ddf a —
pi t no eecn io s nt e n k s n i o o t e t rbe ns ohji n f ufcs l a o f h s dt n.I d t e al gve f me n e se po l o ci t o i h e a o w s i r d ms mo t n go r e. oi s a
鞋楦曲面反求
进 行处 理 , 得母 楦 曲面离 散点 数据 。因此 , 获 只能 采 用 离散 造型 技术来 近似 描述 鞋楦 的外 轮廓 面 。所谓 离 散法 造型 , 就是 用 满 足一 定 精 度 要 求 的小 平 面 片 来 近似 表达 整个 曲面 体 。对 于 鞋 楦 , 散精 度 与鞋 离 楦 表面 数据离 散程 度有 关 。
收 稿 日期 :0 6一 9 O 2 0 O —2
・
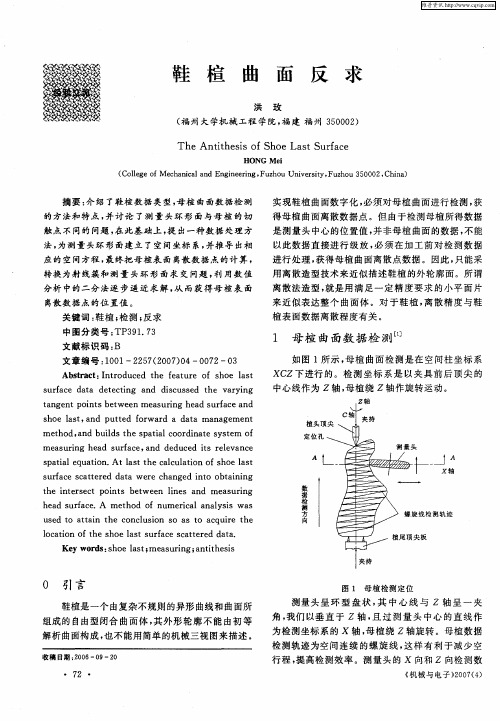
图 1 母 楦 检 测 定 位
测量 头 呈 环 型 盘 状 , 中 心 线 与 Z 轴 呈 一 夹 其 角 , 们 以垂 直 于 Z轴 , 过 测 量 头 中 心 的 直线 作 我 且 为检 测坐标 系 的 X 轴 , 楦绕 Z轴旋 转 。母楦 数据 母
( l g fM e h n c l n g n e ig, u h u Un v r i , z o 5 0 2, i a Co l eo c a ia d En i e rn F z o i e st Fu h u 3 0 0 Ch n ) e a y
摘 要 : 绍 了鞋 楦数 据 类型 , 介 母楦 曲面数 据检 测
实现鞋 楦 曲面数 字化 , 须对 母楦 曲面进行 检测 , 必 获 得母 楦 曲面 离散数 据点 。但 由于检测母 楦所 得数据
是测量 头 中心 的位置值 , 非母 楦 曲面 的数 据 , 能 并 不 以此数 据直 接进 行级 放 , 须在 加 工 前 对检 测 数 据 必
的方 法和 特 点 , 讨论 了测 量 头环 形 面 与母 楦 的切 并
触点 不 同的问题 , 此基 础上 , 出一种数 据 处理方 在 提
法 , 测量 头环 形 面建 立 了空 间坐标 系, 为 并推 导 出相 应的 空间方程 , 终把母 楦表 面 离散 数据 点的计 算 , 最
鞋楦的反求设计与快速成型加工
第36卷第5期邢台职业技术学院学报V ol.36No.5 2019年10月Journal of Xingtai Polytechnic College Oct. 2019鞋楦的反求设计与快速成型加工蒲筠果,朱良,徐翔(邢台职业技术学院,河北邢台 054035)摘要:探讨了反求工程和快速成型技术在鞋楦的模型设计与成型加工中的应用,利用Shining-3D Scanner扫描设备对鞋楦进行数据采集,通过软件Geomagic Studio对采集的数据进行拼接、精简封装和修补优化,将处理后的数据导入逆向工程软件Geomagic Design X完成了鞋楦曲面优化重构,最后利用快速成型技术对鞋楦进行了成型加工。
关键词:鞋楦;反求工程;Geomagic Studio;快速成型中图分类号:TS943.2 文献标识码:A 文章编号:1008—6129(2019)05—0075—04反求工程是将已有产品样件或实物模型转化为工程设计模型,并在此基础上进行解构和重构的一系列分析方法和应用技术的组合。
快速成型简称RPM技术,它把复杂的三维制造转化为一系列二维制造的叠加,可以在不用模具和工具的条件下生成几乎任意复杂形状的零部件,极大地提高了生产效率和制造柔性。
鞋楦是鞋的成型模具,鞋楦的自由型曲面一般都是由非初等曲线构成的,其设计过程与加工过程十分复杂,如果将逆向工程和快速成型技术应用于鞋楦的设计和制造,可以验证鞋楦的精度和加工可靠性,并大大缩短其生产周期。
一、鞋楦数据采集数据采集是逆向工程建模中的第一步,其采样质量直接影响模型的精度,它是用设备对实物进行测量来获取实物的表面数据。
测量方法可分为接触式和非接触式两种,接触式对被测物的光线和表面条件要求不高,但测量速度较慢,并且由于柔性材料易出现变形而产生误差;非接触式对被测物体表面和光线敏感,测量速度快且对物体材料没有要求,但精度较低。
对鞋楦的数据采集使用Shining-3D Scanner非接触式三维激光CCD扫描仪,结合360°旋转工作台,运用三维激光扫描仪从多个不同的方向进行扫描,从不同角度获取鞋楦曲面的多片点云数据,其采集数据步骤如下:(1)对鞋楦母模表面喷涂显像剂,粘贴标志点,其分布尽量无规则以便定位,然后放在360°旋转工作台上,置于光线明亮适中均匀的房间内;(2)使用三维扫描仪对物体进行多角度、完整的扫描,快速获取高密度的点云资料。
曲面拼接光顺方法研究

1引言汽车曲面品质是影响汽车外观设计以及汽车性能的一个重要环节。
车身的A 级曲面,是指汽车车身外表面中的高可见区域,包括发动机引擎罩、车门、后背门、顶盖、前后翼子板、前后保险杠等。
在A 级曲面重构过程中,如何构建曲率连续的拼接曲面是难点。
目前,对A 级曲面的研究主要从精度和光顺2个方面进行。
陈廉清等人(2006)提出自由曲面的控制点数量对曲面重构精度有很大影响,控制顶点的增加,控制网格相应增加,曲面拟合精度提高,没有结合光顺性。
孔令德等人(2020)采用NURBS 插入节点技术作为实现曲面细分建模,解决了建模中曲面裁剪与拼接的问题,数值计算稳定,算法简单,并可部分细分,但更适合于CG 动画和雕刻曲面的设计。
王鹏等人(2019)针对汽车车身拼接曲面光顺方法进行研究,提出不同曲率半径拼接曲面的光顺方法,在建模过程中,对曲面阶数的选取进行概括性总结,没有进行深入分析。
本文以Bezier 曲面为研究对象,针对现有研究情况,从曲面阶次和控制点的角度,对其合理性进行理论分析,为构建曲率连续的拼接曲面奠定基础。
同时从双面拼接和多面拼接的三面圆角、渐消角以及翼子板入手,从光顺实践的方向给出了更具操作性的方法。
2曲面连续几何条件2.1Bezier 曲线Bezier 曲线由端点和控制顶点组成,通过修改点的坐标可以改变曲线的形状,使用Bernstein 多项式来表示:p (u )=∑nB i ,n (u )p i ,u ∈[0,1](1)其中,B i ,n (u)=n [i !(n-i )!]u i (1-u )n-i是Bernstein 多项式,是构成Bezier 曲线的基本函数;P i (i=0,1,…,n )构成了曲线的特征多边形,为曲线控制多边形的n+1个控制顶点。
n 表示的是曲线的阶数。
增加了一个控制顶点后,定义同一条曲线的新控制点为P i (i=0,1,…,n+1),则在保持曲线形态不变的情况下,可以增加控制点提高曲面阶次,升阶公式为:P 'i =i n+1P i -11-in+1()Pi(2)曲线升阶后,增加控制顶点调整曲线,2个端点位置不变,因此,灵活度更强。
鞋楦反求曲面的特征点识别及样条拐点的修型处理
鞋楦反求曲面的特征点识别及样条拐点的修型处理
彭志牛;吴宇燕;王宇晗
【期刊名称】《轻工机械》
【年(卷),期】2006(024)004
【摘要】为在数控鞋楦加工数控系统上实现快速、准确的放码加工,提出了一种直接对鞋楦测量曲线数据进行棱边特征点的识别,再根据鞋楦放码原理对特征点相对应的拐点进行修型处理的方法,在不必对鞋楦曲面进行复杂的精确造型处理前提下,较好地解决了鞋控级放后棱边变圆的问题.
【总页数】4页(P36-39)
【作者】彭志牛;吴宇燕;王宇晗
【作者单位】上海交通大学机械与动力工程学院,上海,200030;上海交通大学机械与动力工程学院,上海,200030;上海交通大学机械与动力工程学院,上海,200030【正文语种】中文
【中图分类】TS943.26
【相关文献】
1.鞋楦反求中的曲面光滑拼接算法 [J], 刘琼;王乾廷;俞芙芳
2.基于单双幅图曲线曲面特征点的透视反求及拟合 [J], 赵越;吴初汉
3.鞋楦曲面反求 [J], 洪玫
4.反求车身外表面建模中的B样条曲面 [J], 段敏;石晶;焦洪宇;孙兆有
5.基于反求控制点的B样条曲面重建算法的实现 [J], 吴丽娟;关贵明;吴建军;李柳;韩松
因版权原因,仅展示原文概要,查看原文内容请购买。
8-曲面拼接技术
Studio 指南曲面拼接技术:Objective: 使用户熟悉Studio Version 5里提供的曲面拼接技术。
曲面拼接技术的主要优点在于:可以把一个非常复杂的模型分解成一些简单的部分。
这些部分可以很快的表面成型。
然后,通过曲面拼接操作将这些曲面部分融合在一起构成最终的、完整的曲面。
Files: \…\Geomagic Studio 5\TutorialData\f-16.wrp1、打开F-16.wrp.这是一个被分解成多个成分的模型。
我们将对它们进行曲面建模,然后拼接出最终的表面模型。
2、在左边的Model Manager种选择wing_template元件。
点击鼠标右键,选择Hide,将这个元件临时隐藏。
3、选择fuselage(机身)元件,将它激活。
机身以前就已经表面化好了,但是我们希望可以对它的能见度进行设置,例如将它设置成半透明状。
这样我们可以确保其它元件完全拼接在机身上,从而在完成时,构成一个单一的封闭的曲面。
4、选择左面的Primitives标题,选上Edges,去掉Spline Patches。
就可以看到下面的图像。
5、选择左边的Model Manager标题,激活left_wing。
6 、放大左翼连接机身的部分。
为了以后可以将各个元件拼接在一起,各部分间必须完全重叠。
为此,我们将机翼的几何结构延伸到机身以内。
在Boundaries菜单中选择Extend Boundary。
选择离机身最近的机翼部分,在对话框的length中键入0.4 inches,然后点OK。
7、按ALT+1键,在图像窗口只显示left win g(左翼)。
8、选择Fill Holes图标。
去掉Curvature-Based Filling选项,点击机翼的任意一个开放的边,以形成一个封闭的结构。
点OK填充。
9、用Ctrl +C取消对所有多边形的选定。
10、在状态兰中选择Shape Phase图标。
11、在Patches菜单中,选择Patch Template->Apply。
鞋楦反求中的曲面光滑拼接算法
Smoothness merging algorithm in reverse
reconstruction of shoe last
作者: 刘琼 王乾廷 俞芙芳
作者机构: 福建工程学院机电及自动化工程系,福建福州350014
出版物刊名: 福建工程学院学报
页码: 807-809页
主题词: 算法 鞋楦反求 曲面重构 光滑拼接
摘要:为了实现鞋楦反求过程中所构造曲面的光滑性,提出了一种曲面片的拼接算法。
利用激光扫描仪获得鞋楦点云,对经过预处理的点云数据构造出其曲面边界,然后在已知曲面的边界线和边界内部点云的条件下拟合出鞋楦的表面单元曲面,再利用相交于公共边界的两曲面一阶连续原理,导出各单元曲面光滑拼接的约束条件。
拟合结果表明,该算法可以实现鞋楦曲面的快速重建和一阶光滑拼接。
鞋楦特征识别与数据光顺

鞋楦特征识别与数据光顺刘小芹;丁继东;彭芳瑜【摘要】光顺的数据是鞋楦曲面建模的基础,必须对测量得到的含有噪音成分的原始数据进行识别和光顺处理.本文分析了尖点的分布规律,给出了基于曲率的尖点识别方法,并得到了两种求解曲率的方法.针对尖点识别过程中尖点阈值大小的确定问题,提出了一种自动调整的阈值确定方法,提高了算法的效率,同时有效的避免了尖点的漏判和多判问题.在尖点识别的基础上,对鞋楦数据尖点曲线和截面曲线分别进行了最小二乘和多点求均值的光顺处理,得到符合要求的光顺的鞋楦数据.【期刊名称】《武汉工程大学学报》【年(卷),期】2009(031)003【总页数】4页(P81-84)【关键词】鞋楦;特征识别;光顺【作者】刘小芹;丁继东;彭芳瑜【作者单位】武汉职业技术学院机电工程学院,湖北,武汉,430074;华中科技大学机械学院,湖北,武汉,430074;华中科技大学机械学院,湖北,武汉,430074【正文语种】中文【中图分类】TH1220 引言鞋楦是制鞋的模具和基础,鞋的样式,型号,品种和款式主要是根据鞋楦的造型来设计的,在制鞋业有着十分重要的地位.近年来,随着CAD/CAM技术、逆向工程、激光测量技术、计算机数控技术等的迅速发展和在制楦业中的应用,制楦技术得到了较快的发展.在CAD/CAM软件系统上可以快速高效的设计出各种满足用户需求的个性化的鞋楦,并输出数控加工代码,在数控鞋楦机上高效高质量的完成鞋楦的加工.鞋楦数控加工采用数字化的逆向工程系统[1],首先在测楦机上对样楦进行三维扫描,得到样楦的三维采样数据,然后通过去除噪音点、光顺以及特征点识别等一系列的数据处理,通过三维建模得到鞋楦的三维的CAD模型,在此基础上实现对鞋楦模型的编辑和级放,生成NC代码,在数控鞋楦加工专用机床上实现鞋楦的加工,如图1所示.图1 鞋楦加工逆向工程流程Fig.1 Reverse engineering processing of Shoe-last machining鞋楦数据处理的质量,决定了鞋楦CAD模型的好坏,进而影响鞋楦加工的质量,所以鞋楦测量数据的处理是制鞋过程中的十分重要的环节.王希[2]等研究了在极坐标下鞋楦测量数据处理的方法,洪玫[3]给出来了一种极坐标下数据光顺的最小二乘法.本文基于笛卡儿坐标系对鞋楦的尖点特征的识别方法进行了研究,得到了自动调整曲率阈值的算法,同时给出了尖点数据和截面数据的光顺的方法.2 鞋楦特征识别2.1 鞋楦的尖点特征如图2所示,鞋楦是由三张光滑的曲面组成的封闭自由曲面体.鞋楦上部统口区域的鞋楦曲面是楦顶曲面,位于下部的曲面是楦底曲面,处于楦顶和楦顶之间部分称为楦面.图2 鞋楦曲面Fig.2 Curved surface of shoe-last楦顶和楦面,楦面和楦底的连接过渡部分是鞋楦重要的特征曲线,为尖点曲线.在尖点曲线上的点为尖点,是鞋楦重要的特征信息点,如图3的P1、P2、P3和P4点.鞋楦的尖点曲线在鞋的设计过程中十分重要,对鞋设计的质量起着关键的作用.在鞋楦曲面造型中,鞋楦尖点曲线的形状对鞋楦曲面有较大的影响.同时鞋楦数控加工中,刀具在尖点处的加速度和速度较高,为了在加工代码的生成的后置处理中很好的确定合理的速度信息,必须得到尖点的位置信息.为了能够准确全面的采集到尖点信息,采样的数据必须足够多,这样鞋楦曲线和曲面的拟合的误差也就较小.所以必须从海量的采样数据中提取尖点信息.图3 鞋楦尖点Fig.3 Sharp points of shoe-last2.2 尖点识别目前,识别特征信息的方法主要是基于曲率的特征识别法,包括函数法与离散法.函数法是建立曲线曲率函数,求曲率函数极值点来判别曲线的尖点.离散法是直接利用测量的数据进行尖点识别,通过计算各个测量点的曲率角,从而提取轮廓特征点.在鞋楦的尖点识别中由于采样点较多建立曲率函数比较困难,本文采用离散的曲率识别法.2.2.1 尖点的分布规律为了方便尖点的判别和对尖点位置进行预测,需要分析尖点的分布情况,找出其分布规律.同一个截面内,尖点个数只会有两个或者四个的情况,而且每个尖点分布在在不同的象限内.具体在YOZ平面的分布情况有下面三种情况:(1)同一截面存在四个尖点,分布在四个象限.如图4 (a)所示;(2)同一截面存在两个尖点,分布在一二象限.如图4 (b)所示;(3)同一截面存在两个尖点,分布在三四象限.如图4 (c)所示.(a)四个象限(b)一二象限(c)三四象限图4 尖点的象限分布Fig.4 Quadrantal distribution of sharp points2.2.2 测量数据点曲率计算根据曲率的定义,在微积分学中,平面曲线上任何一点的曲率定义为其中:Δα为两点切矢方向角之差;Δs为两点间的弧长.图5 测量点曲率计算Fig.5 Curvature calculating of measuring points图5中表示截面YOZ上曲线,ABC三点坐标分别是A(yi-1,zi-1),B(yi,zi),C(yi+1,zi+1)则有:求得角度增量为Δα=|αi-αi-1|弧长可以使用弦长替代,近似值为Δs≈ΔsAB+ΔsBC因此可以近似求得B点的曲率为(1)替代算法.为了计算的方便,这里给出一种计算曲率的替代方法.图5中ABC三点组成三角形△ABC,设D点为B到AC边的垂足,垂直距离HBD,AC的边长LAC.可以证明,HBD与LAC的比值即代表B点的曲率KB[2].即KB=HBD/LAC(2)其中:k为线段AC的斜率,k=(zC-zA)/(yC-yA)yC≠yA.在一个截面内的某一个象限内,如果有尖点存在,则在尖点两侧的测量点域内,尖点的曲率取最大值,而且显著大于其他点的曲率值.同时,尖点曲线应该是一条光滑的曲线,前后截面的同一象限内的尖点位置满足一定的距离条件.综合考虑尖点的分布规律、曲率的取值特征和前后截面的尖点位置信息,进而判断出尖点位置. 2.2.3 尖点曲率阈值的确定按照上述方法计算出各点的曲率Ki,通常当Ki大于一设定的阈值K0时,就可以判定该点为尖点.但是,如果对于整个鞋楦,只使用一个固定的阈值,由于鞋楦各个部分的测量点的曲率大小相差较大,很难使得判别出来的尖点正好是鞋楦实际的尖点,就会造成多判或漏掉尖点.这里给出一种自动调整阈值的方法.对于某一截面,根据尖点的分布规律和前后界面的尖点分布情况可推算出其尖点的个数N.在判别过程中,首先按照给定的阈值K,根据曲率的大小计算出曲率大于K的点的个数Nk,如果Nk>N,则增大K值,如果Nk<N,则减小K值,循环迭代直到Nk=N,就判别出了本截面所有的尖点,记下此时的阈值K′.由于尖点曲线是一条光滑曲线,在同一条尖点曲线上相邻尖点的值应该是连续的,所以,计算下一截面时尖点曲率的阈值使用上一截面的阈值K0为最初值,这样就能加快迭代的速度,快速判别出此截面的尖点.3 数据的光顺3.1 尖点曲线数据的光顺在测量过程中,由于存在测量误差和信号的干扰,识别出的尖点不一定是理想位置的尖点,并且他们不一定在一条光顺的曲线上,需要对尖点在一定的位置范围内进行光顺处理.由于楦底和楦顶尖点在各自的尖点曲线上在X方向呈等距分布,可以使用等距的最小二乘法进行光顺.五点三次光顺的原理如下.在XOY平面内对于一组等距点的x坐标值x0<x1<x2…xn,对应的y值y0,y1,y2…yn,每个数据点前后各取两个相邻的点,运用三次多项式:y=a0+a1x+a2x2+a3x3逼近.使用最小二乘原理确定系数a0,a1,a2,a3可得五点三次平滑公式:如图6(a)所示,为识别出的原始的楦顶部尖点数据拟合的尖点曲线,图6(b)为光顺后的尖点拟合的尖点曲线.(a)原始数据拟合的曲线(b)光顺后数据拟合的曲线图6 尖点数据的光顺Fig.6 Data Smoothing of sharp points3.2 鞋楦截面数据的光顺对于大规模的数据点云的噪声过滤,可采用的方法有程序判断滤波、N点平均滤波以及预测误差递推辨识与卡而曼滤波相结合的自适应滤波法等.另外,光顺处理方法还有能量法、最小二乘法以及小波技术,这三种光顺方法都是通过优化方法来调整曲线控制顶点,也就是对拟合以后的曲线进行光顺处理[4].但是,根据鞋楦采样数据的特点,要在鞋楦曲面建模之前,过滤掉样楦测量数据中不合理的噪声点,因此不能通过优化方法调整曲线的控制顶点来达到光顺的目的,而是应该从离散数据本身分布的几何位置出发直接判断数据点列的光顺性并对其进行调整.尖点是鞋楦重要的特征,测量数据的光顺必须要保留尖点信息.本文采用N点求平均滤波的方法,对每一个截面尖点之间的测量数据进行光顺.取N=5,对于点Pi,在其前后各取两各点进行5点求平均滤波.则有:(3)从而得到了Pi点光顺后的坐标.对同一个截面内的尖点之间的数据进行多点求平均滤波适当的次数,光顺的效果如图7所示.(a)光顺前(b)光顺后图7 鞋楦数据的光顺Fig.7 Data Smoothing of Shoe-last在鞋楦尖点曲线数据和截面数据光顺的基础上,实现了较好质量的鞋楦曲面造型,如图8所示.图8 鞋楦曲面Fig.8 Curved surface of shoe-last4 总结综上所述,根据分析尖点的分布情况,实现了基于离散点的自动调整曲率阈值的曲率识别算法.分别使用最小二乘法和多点均值法对尖点数据和鞋楦截面数据进行了光顺,达到了较好的效果,实现了鞋楦的三维曲面造型.参考文献:[1]蔡锦达,吴美娟.鞋楦扫描机的控制系统的开发[J].控制与传动,2004,(11):54-56.[2]王希,罗达立.数控刻楦机实用化数据处理技术[J].重庆大学学报,2001,(4):140-143.[3]洪玫.鞋楦曲面测量数据光顺[J].机械制造与研究,2005,34(3):41-43.[4]刘冬,林述温.鞋楦数据光顺与建模[J].华侨大学学报,2003,24(3):290-294.。
鞋楦曲面数字化级放方法的研究
文章编号:1000-2243(2004)02-0162-04鞋楦曲面数字化级放方法的研究聂晓根,李志鑫,薛昭武,范扬波(福州大学机械工程与自动化学院,福建福州 350002)摘要:根据鞋楦级放原理与级放规范,研究了实现鞋楦曲面数字化级放的方法.着重分析了通过坐标系变换解决母楦曲面数据空间坐标系与级放空间坐标系不一致产生的问题并给出了解决方法,提出通过双线性内插法和设置围度与长度级放误差补偿因子来提高鞋楦级放精度的方法.关键词:数控刻楦机;鞋楦;级放;C AD 中图分类号:TP391.73文献标识码:AR esearch on the method of digital last of boot treeNIE X iao -gen ,LI Zhi -xing ,X UE Zhao -wu ,FAN Y ang -bo(C ollege of Mechanical Engineering and Automation ,Fuzhou University ,Fuzhou ,Fujian 350002,China )Abstract :According to the principles and standards of the last of boot tree ,we make research on the method of realizing digital last of boot tree surface in this article and put em phasis on the im provement of the last accuracy of boot tree by the change of coordinate system which s olves the problems arising from the discordance between the digital coordinate system of m other boot tree and the last coordinate system ,and by means of bilinear interpolation and error com pensation of length last.K eyw ords :numerical control boot tree machine ;boot tree ;last digitizing ;C AD传统的鞋楦制造方法是手工制作母楦后,以母楦为模板在鞋楦仿形加工机床上进行加工.由于机械级放只是一种近似,通常同一系列不同规格的鞋楦制造需采用多种母楦,造成母楦规格多、制备复杂、制造周期长、成本高,而且母楦制造误差直接影响到鞋楦的制造精度,不能适应鞋类市场的需要.数控化制楦装备以其精度高、表面质量好、母楦规格少、级放准确以及效率高等优点,将成为制楦的主流设备.要实现鞋楦制造数字化,解决鞋楦曲面的数字级放是关键.因此,寻求一种高效、准确、可靠的鞋楦数字级放方法对提高鞋楦加工质量至关重要.1 鞋楦级放原理[1]图1 鞋楦级放简图Fig.1 Sketch of the last of boot tree鞋楦曲面数字化级放是指利用通过测量获得的母楦数据模型,根据级放原理,采用计算机软件处理方法,生成鞋楦全套尺寸的数字化处理过程.与传统机械级放相比,数字化级放具有准确、高效、经济、迅速等优点.鞋楦的级放包括长度级放和围度级放.鞋楦长度和围度如图1所示.我国采用的标准规定:鞋楦每级放±1#,围度级放7.5mm 和长度级放10mm.为保证鞋楦在加工过程中易于成型并具有较高的刚性,收稿日期:2003-09-04作者简介:聂晓根(1968-),男,硕士,讲师.基金项目:福建省重大科技投标项目资助(2002H094)第32卷第2期福州大学学报(自然科学版)V ol.32N o.22004年4月Journal of Fuzhou University (Natural Science )Apr.2004C 轴回转中心往往与鞋楦长度方向不重合,机械级放方法近似地将C 轴回转中心视为长度级放方向,将与C 轴垂直的方向视为围度级放方向,这种级放方法是近似的,级放时将产生较大误差,它不适用于鞋楦数字化级放.2 鞋楦曲面数字化级放鞋楦的形状独特,它是由非圆曲线或曲面组成的具有复杂自由曲面形状的形体,其外形轮廓不能由初等解析曲面表示.借助通用计算机和测量机,将鞋楦曲面加工的刀轨细分为微小的三维直线段后再编写加工程序,可简化鞋楦加工数控程序的编写.因此,鞋楦数控加工中,鞋楦数据的级放是对测量数据而言的.图2 鞋楦数据采集原理图Fig.2 Principle of digital dataacquisition of the boot tree采集母楦数据时,测量轮中心相对鞋楦的运动轨迹为空间螺旋线,如图2所示,测量数据以柱面坐标(ρ,θ,Z )表示.为减少记录的数据量,提高采样速度,只记录测量轮中心相对于C 轴回转中心的位移ρ.而θ和Z 的值由于每周测量的数据点数相同,可间接通过数据点的位置来求得.如每周测量点数为m ,则θi =i ×2πΠm ,Z i =i ×t 0Πm ,其中i 为测量点序列中第i 个点,t 0为测量螺旋线的导程.由于母楦数据的采集是在空间坐标系O ′X ′Y ′Z ′中(见图1)进行的,它不同于鞋楦级放坐标系OXYZ .可从一个简单的例子看出由于级放方向不同而引起级放结果的不同.图3(a )所示为一长方体,现将其分别沿X 、Y 方向进行级放,相应得到如图3(b )、3(c )所示的结果.由此可以看出,实体沿不同方向级放所得结果是不同的,这就是鞋楦机械级放精度不高的主要原因.鞋楦曲面复杂,而且鞋楦在长度和围度方向级放的比例不同,若直接利用采样获得的母楦曲面数据进行级放,势必造成级放结果误差太大,影响鞋楦加工质量.因此,正确把握级放方向是保证级放精度的重要前提.图3 级放方向对级放结果的影响Fig.3 Last result effected by direction图4给出了鞋楦级放中的主要参数.其中:e 1为前翘高;e 2为后跟高;B 、C 分别为后跟和前翘至测量回转中心的距离.通过对鞋楦级放原理的分析,提出鞋楦曲面数字化级放的方法.图4 鞋楦级放原理图Fig.4 Principle of boot tree last・361・第2期聂晓根,等:鞋楦曲面数字化级放方法的研究 1)数据级放前,需对测量数据进行坐标变换.首先将测量数据的柱面坐标表示成直角坐标,即:x ′i =ρi ×cos θi =ρi ×cos (i ×2πΠm )y ′i =ρi ×sin θi =ρi ×sin (i ×2πΠm )z ′i =i ×t 0Πm其中:m 为每周测量点数;i 为测量点序列中第i 个点;t 0为测量螺旋线的导程.2)将级放坐标系原点O 平移至与测量坐标系原点O ′重合,变换矩阵为:T ty =10000100001ty 01其中:ty =L ×tan (φ),φ=φ1-φ2,φ1=arctan =[(B +C )ΠL ],φ2=arcsin[(e 1-e 2)×cos φ1ΠL ].3)将鞋楦绕X 轴逆时针旋转φ,使测量坐标系Z 轴转至与级放方向Z 轴重合,变换矩阵为:R x (φ)=1000cos φsin φ00-sin φcos φ0001 4)将鞋楦进行长度和围度方向的级放,变换矩阵为:T s =K c000K c000K l001式中:K c =ηcS i S 0=ηc ×S 0+m ×ΔS S 0,K i =ηl ×L i L 0=ηl L 0+m ×ΔLL 0其中:ηc =S j ΠS c ;ηl =L j ΠL c ;S i 为计算肥度;S j 为理论(或目标)肥度;S c 为试加工获得的肥度;L i 为计算长度;L j 为理论(或目标)长度;L c 为试加工获得的长度;ηc 、ηl 分别为肥度和楦长级放修正因子,试加工时分别取ηc 、ηl 为1.试加工后测得S c 、L c ,若存在误差,重新修改修正因子ηc 、ηl ,再进行一次级放,可消除误差,获得准确的级放数据.5)将鞋楦绕X 轴顺时针旋转φ,使级放坐标系Z 轴与测量时的C 轴回转中心重合,变换矩阵为:R x (-φ)=10000cos φ-sin φ00sin φcos φ00001 6)将鞋楦从O 点反平移至O ′点,使鞋楦回到加工位置,变换矩阵为:T -ty =10000100001-K c ty 01所以,鞋楦数字化级放变换矩阵为:T =T ty R x (φ)T s R x (-φ)T -ty 上述过程中,第2、第3步将鞋楦从测量方位转化为级放方位;第4步实现鞋楦的围度和长度级放;第5、第6步将级放后的数据还原为加工方位.鞋楦进行数字化级放后,原来刀心规则的螺旋线变为不・461・福州大学学报(自然科学版)第32卷规则的螺旋线,如图5(a )所示实线为由鞋楦级放后数据点连成的曲线,虚线为理想的螺旋线,为此,需对级放后的数据进行螺旋线插补.根据图中数据的特点,采用双线性内插值法[2]可较好实现这一要求.图5 走刀轨迹螺旋线插补Fig.5 The cutter location acquired by helix interpolation如图5(b )所示,空心圆为级放后的数据点,以空间柱面坐标形式(R ,θ,Z )表示;实心圆为经插值后的数据点,以螺旋线数据(R ,θ)的形式表示.利用双线性内插值法计算Q 点极径的过程如下:1)根据P 1、P 2及R p 1、R p 2插值求R P 12:R p 12=R p 1+α(R p 2-R p 1)其中:α=(Z Q -Z p 1)Π(Z p 2-Z p 1).2)再根据P 3、P 4及R p 3、R p 4插值求R P 34:R p 34=R p 3+β(R p 4-R p 3)其中:β=(Z Q -Z p 3)Π(Z p 4-Z p 3).3)最后根据R P 12和R P 34插值求R Q :R Q =R p 12+λ(R p 34-R p 12)其中:λ=(θQ -θp 3)Π(θp 4-θp 3).将级放后不规则的螺旋线通过插值获得规则的螺旋线后,即可根据加工螺距(精度)的要求,通过螺旋线插值方法获得加工刀具中心轨迹的螺旋线,再根据加工中所需每周的点数及切削速度要求,通过B 样条插值的方法,获得任意间距的加工点,以加工点数据生成规定格式的数控程序[3,4].3 结语按上述级放方法设计的鞋楦C AD ΠC AM 系统,经样机加工试验结果表明:采用该级放方法获得的鞋楦级放数据准确、加工的鞋楦表面质量好、形状不失真,较好地满足了鞋楦数字化加工的要求.参考文献:[1] 高坤福.实用制鞋手册[M].台北:台湾识海博公司,1999.[2] 霍宏涛.数字图像处理[M].北京:机械工业出版社,2003.43-45.[3] 王爱玲,张吉堂,吴雁.现代数控原理及控制系统[M].北京:国防工业出版社,2002.125-129.[4] 朱心雄.自由曲线曲面造型技术[M].北京:科学出版社,2000.352-366.・561・第2期聂晓根,等:鞋楦曲面数字化级放方法的研究。
光滑拼接2个二次曲面的算法
光滑拼接2个二次曲面的算法
光滑拼接2个二次曲面的算法是指:将2个二次曲面连接在一起,使得它们之间没有明显的突兀,形成一个光滑连续的曲面。
该算法可以分为以下几步:
(1) 使用数值方法来计算2个二次曲面的曲率半径,以便确定拼接处的曲率半径;
(2) 由于2个二次曲面的曲率半径不同,因此要对它们进行缩放,使曲率半径保持一致;
(3) 调整2个二次曲面的参数,让它们的曲率半径相同;
(4) 将2个曲面进行拼接,使它们之间的连接处处光滑连续;
(5) 通过样条曲线算法,对拼接后的曲面进行优化,使之保持光滑连续。
5×5片双三次Bézier曲面片的一类C2光滑拼接方案
5×5片双三次Bézier曲面片的一类C2光滑拼接方案
陈炼;汤正诠;贾红丽
【期刊名称】《应用数学与计算数学学报》
【年(卷),期】2007(021)002
【摘要】文章提出的5×5片双三次Bézier样条插值曲面的反算算法是受颅骨补缺仿生支架的三维数学建模的激发而产生的.针对于中间有一大片空缺而只有四个边角上可以给出插值条件的需要用很多双三次Bézier曲面片通过拼接来拟合的这样一类曲面,在解决曲面片的反算和连续光滑拼接的四个问题的基础上,本文设计出5×5片双三次Bézier曲面片的一种C2光滑拼接的方案,并分析了控制顶点解的存在唯一性,还给出了应用实例.最后把方案进行拓展,在理论上设计分析了
(5+4n1)×(5+4n2)片双三次Bézier曲面片的光滑拼接.
【总页数】9页(P1-9)
【作者】陈炼;汤正诠;贾红丽
【作者单位】上海大学理学院,上海,200444;上海大学理学院,上海,200444;上海大学理学院,上海,200444
【正文语种】中文
【中图分类】O24;O29
【相关文献】
1.双三次Bézier曲面片光滑拼接条件的一个推导 [J], 白鸿武
2.用有理双三次Bézier曲面片混合二次曲面 [J], 方美娥;汪国昭
3.双三次Bézier曲面片光滑拼接的实现 [J], 邱曹勇;贾红丽;汤正诠;张娟
4.多片双三次Bézier曲面片的C2连续拼接探讨 [J], 张娟;汤正诠;邱曹勇
5.双三次Bézier曲面片的光滑拼接 [J], 贾红丽;汤正诠
因版权原因,仅展示原文概要,查看原文内容请购买。
B样条曲面间的光滑拼接算法
B样条曲面间的光滑拼接算法B样条曲线曲面是实体造型,虚拟现实等CAD/CAM领域中广泛使用的几何造型工具。
它不仅继承了Bézier曲线曲面的所有优点,而且具有局部修改的性质,因此得到工业界的广泛认可。
但在CAGD领域目前仍存在许多问题待解决。
曲面片间几何连续问题便是其中一个重要的问题。
目前为止,关于Bézier曲面的几何连续问题的讨论已经基本完善,但关于B样条曲面的几何连续的讨论还不多。
本文研究两片张量积B样条曲面(以双三次张量积B样条曲面为例)的G<sup>1</sup>,G<sup>2</sup>连续条件,并分别以三片和四片B样条曲面为例,研究了奇数面角点和偶数面角点处实现G<sup>1</sup>拼接的相容性条件的实现,并给出了算法的具体流程。
本文所用的算法避免了将B样条曲面分裂成多片Bézier曲面后,对Bézier曲面进行拼接的弊端,直接给出两B样条曲面控制顶点所应满足的条件。
下面简要介绍算法的思想。
设有两张B样条曲面B(u,v)和c(s,v),且B(0,v)=C(O,v)(G<sup>0</sup>连续)。
不妨设B,C在v方向具有相同的节点矢量,则B与C 之间G<sup>1</sup>连续等价于:其中,α(v),β(v),γ(v)是分段多项式函数.一般地,取α,β为常数,γ(v)是分段线性函数,则由[3]中所述知:C(0,v)是整体三次多项式曲线,γ(v)是整体线性函数,故设:γ(v)=γ<sub>0</sub>(1-v)+γ<sub>1</sub>v。
那么,也是整体三次多项式曲线。
由B样条基函数的基底性可知,可将表示为B样条的形式。
设再设吉林大学硕士学位论文B样条曲面间的光滑拼接问题2守(。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S o h e sme gn lo ih i e e s e o sr cin o h els mo t n s r i g ag rt m n r v r er c n tu to fs o a t
LuQog i i ,WagQatg Y uag n n i i , uFfn nn
Ab t a t n o d rt e l e t es o h e so ec n tu t d s r c n t e r v re c n t c in o s r c :I r e r a i mo t h s f h o sr ce u f e i h e e s o sr t f o z h t a u o s o a t r ig ag r h o u fc s wa r p s d F rt h on lu s o mie s g h e l s ,a me gn l o i m fs ra e s p o o e . i ,t e p i tco d wa b n d u i t s n
u i s r c s o e s o a twee f td o o d t n t a h o n a i so u fc n h n e a nt u f e ft h e ls r t n c n i o h t e b u d r fs r e a d t e i tm l a h i e i t e a p i tco d w r v i b e T e c n t i ig c n i o s o mo t i g me gn mo g t e u i s r o n lu e e a a l l . h o s an n o dt n fs o h n r i g a n n t u — a r i h f c swe e d d c d a c r i g t n r e o t u u to ewe n t u fc s w t o a e r e u e c o d n o o e o d r c n i o s meh d b t e wo s ra e i c mmo n h n
me g e u ts ra e t n r e I o t n s . r e t ni u f c s wi 1o e o d rSI h e s h 1 q
Ke wo d :r v re r c n t c in o h e l s ;s r c e o s u t n;s o t n s r i g y r s e es e o sr t fs o a t u f e rc n t ci u o a r o mo h e s me gn
文章 编号:6 2—44 (0 6 0 0 0 0 17 3 8 20 )6— 87— 3
鞋楦反 求 中的 曲面光滑拼接算法
刘琼 ,王乾廷 , 芙芳 俞
( 福建工程 学院机 电厦 自动化 工程 系,福建 福 州 3 0 1) 5 0 4 摘要 : 了实现鞋楦反 求过程 中所构造曲 面的光 滑性 , 出了一种 曲面片的拼 接算法。利 用激光扫描 为 提 仪获得鞋楦 点云, 对经过预 处理 的点云数据构造 出其曲面边界 ,然后在 已知 曲面的边界 线和边界 内部 点云的条件 下拟合 出鞋楦 的表 面单元曲面,再利 用相交于公共边界 的两曲面一阶连 续原理 , 出各单 导 元 曲面光滑-' 9 ̄的约柬条件 。拟合 结果表明 , I 该算法可以实现鞋楦 曲面的快速重建和一阶光滑拼接。 关键词 :算法 ; 鞋楦反 求;曲面重构 ;光滑拼接 中图分 类号 : S 4 .6 T 93 2 文献标识码 : A
b u d r s T e ft g r s l h w h tt i ag r m a e o src h h e ls sra e a d o n ai . h tn e ut s o ta hs loi e ii s h t c n rc n t tte s o a t ufc n u
0 引言
在传统鞋楦设计 中, 制鞋工人要依据不 同尺 寸大小制作鞋楦 , 再采用仿雕技术 , 制作数个相 同 尺寸 的鞋楦供 选择。 这种生产模式工作效率低 , 成本高 , 如果取得某标准鞋楦 的数字数据 , 再依
接方法。目的是构 造 出符合设计 要求的鞋楦模 型, 为数控刻楦提供原始数据。
lsrs a n r h u a e b u d r sw r o s u td frtep itco d pe rc se . T e h a e c n e.T es r c o n ai ee c n t ce o h on lu rp es d h n te f e r o
维普资讯
第 4卷 第 6期
20 06年 1 2月
福建工程学院学报
Junl f ui n esyo eh o g ora o F j nU i ri f nl y a v t T o
V 1 4 No 6 o. .
De .2 O c o6