自动控制原理实验-卫星三轴姿态控制系统
三轴稳定卫星姿态控制算法研究共3篇
三轴稳定卫星姿态控制算法研究共3篇三轴稳定卫星姿态控制算法研究1三轴稳定卫星姿态控制算法研究在卫星的运行过程中,姿态控制技术一直是关键技术之一。
卫星的三轴稳定姿态控制算法,是卫星姿态控制领域中的经典问题之一。
三轴稳定卫星的姿态控制需要同时控制三个轴向的角速度,以保持卫星的稳定运行,确保其执行任务的精确性和安全性。
在本文中,我们将对三轴稳定卫星姿态控制算法进行研究,并提出一种优化算法。
三轴稳定卫星姿态控制的基本问题是什么?三轴稳定卫星姿态控制中的基本问题是,如何使卫星保持稳定的姿态运行,以完成其所需的任务。
在此过程中,需要控制卫星的角速度,从而保持其稳定的旋转。
三轴稳定卫星姿态控制的关键点是合理地选择合适的姿态控制算法。
三轴稳定卫星姿态控制算法的分类目前,三轴稳定卫星姿态控制算法可以分为三个主要类型:基于PID控制器的算法、基于模型预测控制的算法和基于滑模控制的算法。
(1)基于PID控制器的算法PID控制器是最常用的一个控制器,在三轴稳定卫星姿态控制中也广泛使用。
PID控制器能够通过反馈调节卫星的角速度,使其保持稳定的姿态,从而确保其可以按照既定的轨道执行任务。
PID控制器的控制过程包括三个部分:比例积分微分控制。
其中,比例控制器能够根据误差的大小对卫星的角速度进行反馈控制,积分控制器可以根据误差积分值对误差进行修正,微分控制器则可以根据误差的变化率对误差进行修正,在三个部分协同下,PID控制器可以实现对卫星姿态的稳定控制。
(2)基于模型预测控制的算法基于模型预测控制的算法可以减少姿态控制的误差,并更加精准、快速地控制卫星的姿态。
这种方法将卫星的角速度和姿态动力学模型等信息融合在一起,通过预测卫星的姿态变化并提前作出反应,从而实现更加准确的实时控制。
(3)基于滑模控制的算法基于滑模控制的算法以非线性控制为基础,具有较好的鲁棒性和追踪性。
滑模控制算法通过滑模面的设计,把控制量与状态变量分离,使其具备独立控制性质。
卫星姿态动力学与控制(2)

S’
s
O
jb
ib
坐标系绕单参考矢量的转动
单轴与 三轴
优点: 已知初始姿态,不受外部影响 缺点: 1、须知道初始姿态 2、陀螺漂移锁引起的姿态确定误 差 3、参考系转换
敏感器的输出是某空间基准场在敏感方向上的 一个数值反应。而当敏感器定向不同时,测得的数 值也应有所不同。这种空间基准场在物理上可以是 光学的、电磁的、力学等。
难以确定
理想
通过大量数据求得最优卫星姿态参数
一种数学处理方法
统计估计
最小二乘法(又称最小平方法) 通过最小化误差的平方和寻找数据的最佳函数匹配 最小二乘法的原则是以“残差平方和最小”确定直线
位置。
为了使J(X)最小,那就求个极值吧,偏导为o的情况下 X为最优解(X为状态矢量矩阵)
1、卡尔曼滤波是迭代的过程 2、运用的是协方差求加权系数(最优 解与观测值) 3、这里的加权系数被称为卡尔曼增益 3、随时可以停止 4、系统模型的不确定性使得状态估计 值偏离
寿命
被动 半被动 半主动
主动 混合系统
自旋稳定 重力梯度稳定 重力梯度+恒值飞轮 重力梯度+半被动阻尼器 半主动自旋稳定 半主动双自旋稳定 纯三轴喷气姿态稳定 零动量轮控系统 偏置动量轮控系统 分级控制/多自由控制
1~10度 1~10度 0.5~5度 1~5度 0.1~1度 0.1~1度 0.1~1度 0.01~1度 0.1~1度 0.01~1度
姿态机动:一种姿态过渡到另一种要求姿态的 控制过程。
以太阳—地球捕获举例
1、陀螺的速率信息降低姿态角速度 2、帆板归零锁定 3、太阳敏感器实现太阳捕获 4、地球捕获完成三轴稳定
目的:发现系统缺陷,验证系统设计和检验产品性能。
卫星姿态控制实现方式

卫星姿态控制实现方式嘿,朋友们!今天咱就来聊聊卫星姿态控制实现方式这个神奇的事儿。
你想啊,卫星在那遥远的太空里,就像一个孤独的舞者,得时刻保持着优美的姿态呢。
那它是怎么做到的呢?这就好比咱人走路,得知道怎么迈腿、怎么保持平衡吧。
卫星也有它的“小窍门”。
首先呢,有一种方式叫自旋稳定。
这就好像一个不停旋转的陀螺,转起来就稳稳当当的啦。
卫星让自己快速地旋转起来,这样就能在太空中保持稳定的姿态啦。
这是不是很有意思?就像一个会自转的小星球一样。
还有啊,三轴稳定也是很常用的办法呢。
想象一下卫星有三个轴,就像一个立体的坐标系,通过各种神奇的装置和算法,来精确地控制每个轴的转动和稳定。
这可比咱平时走直线难得多啦!它得随时应对各种情况,就像咱在复杂的路况中开车一样,得时刻注意着方向。
然后呢,还有一种叫重力梯度稳定的方式。
这就好像卫星被太空里的某种神秘力量拉着,让它乖乖地保持一定的姿态。
是不是很神奇呀?卫星姿态控制就像是一场精彩的表演,各种手段和方法相互配合。
这可不是随随便便就能搞定的事儿,得靠科学家们的智慧和努力呀。
你说要是卫星的姿态控制没做好,那会咋样呢?哎呀,那可就糟糕啦,它就没办法好好工作啦,就像一个人走路东倒西歪的,还怎么能完成任务呢?所以啊,这卫星姿态控制可真是太重要啦!咱平时在地球上,可能觉得这事儿离我们很远,但其实卫星的作用可大着呢。
从天气预报到通信,从导航到科学研究,都离不开这些在太空中“跳舞”的小家伙们。
而它们能好好工作,全靠这神奇的姿态控制呀。
所以说呀,卫星姿态控制实现方式真的是太有趣、太重要啦!这背后凝聚着无数科学家的心血和智慧。
咱可得好好感谢他们,让我们的生活变得更加便利和精彩呀!这就是卫星姿态控制的奇妙世界,是不是让你大开眼界啦?。
机械设计中的三轴控制技术研究
机械设计中的三轴控制技术研究引言机械设计是一个广泛而复杂的领域,涉及到许多不同的技术和原理。
在过去的几十年里,随着电子技术的飞速发展,机械设计中的控制技术也取得了巨大的进展。
其中,三轴控制技术是机械设计中的重要组成部分,并广泛应用于机器人、数控机床等领域。
本文将探讨机械设计中三轴控制技术的研究现状和未来发展趋势。
一、三轴控制技术的定义和基本原理在机械设计中,三轴控制技术是指通过控制三个轴向的运动来实现对物体的精确控制。
这三个轴通常是X、Y、Z轴,分别代表水平方向、垂直方向和深度方向。
三轴控制技术的基本原理是通过不同的控制信号,控制驱动器或伺服电机的运动,使物体在三个轴向上实现所需的运动和定位。
二、三轴控制技术的应用领域三轴控制技术在机械设计中有着广泛的应用。
其中,最重要的应用领域之一是机器人技术。
通过三轴控制技术,机器人可以在三个轴向上实现自由灵活的运动,从而完成各种复杂的任务,如装配、焊接、喷涂等。
另外,三轴控制技术还广泛应用于数控机床、印刷设备、激光加工等领域,实现对物体的高精度加工和切割。
三、三轴控制技术的发展趋势随着科技的不断进步,三轴控制技术也在不断发展。
首先,传感器技术的进步是促使三轴控制技术发展的重要因素之一。
传感器的高精度和快速响应能力,使得对物体位置和运动的检测更加准确和可靠,从而提高了控制系统的性能。
其次,控制算法的创新也推动了三轴控制技术的发展。
通过改进控制算法,可以实现更精确的位置和速度控制,提高控制系统的稳定性和响应速度。
此外,材料和制造技术的改进也为三轴控制技术的发展提供了更好的支持。
新材料的应用可以降低机械零部件的重量,提高机械系统的精度和稳定性;先进的制造技术使得精密零部件的生产更加容易和经济。
四、三轴控制技术面临的挑战和解决方法尽管三轴控制技术取得了巨大的进展,但仍然面临一些挑战。
首先,多轴之间的干涉和耦合是一个难题。
由于机械系统的复杂性,不同轴向之间的运动往往会相互影响,导致控制系统的性能下降。
三轴稳定微小卫星主动磁阻尼姿态控制

摘 要 : 针对三轴稳定微小卫星 ,用四元数法建 立了速 率阻尼 阶段的 动力学 和运动 学模型 。根 据地磁 场强度 矢量投影到轨道坐标系的简便旋转关系 ,设计了采用主 动磁控的 拟比例 微分控 制器 , 同时分 析了磁 力矩器 的磁偶 极矩 。速率阻尼仿真结果表明 : 该控制法有效可行 ,具有一定 的应 用价值 。 关键词 : 三轴稳定微小卫星 ; 主动磁控 ; 四元数 ; 拟比例 微分 控制 ; 速率阻尼 中图分类号 :V448 . 222 文献标识码 :A
ω Mg = 3 0 R0 × IR 0 .
T
2
(2)
此处 : R0 为地心指向星体质心的单位矢量 , 取 R0 =
[0 0 - 1 ] ;ω 0 为圆 轨道无漂 移时的轨 道角速
度 。由刚体运动学可知 : 参考坐标系从任何初始指 向到与体坐标系指向重合的运动 , 能通过绕 n 轴旋 转δ实现 。定义从参考坐标系至星体坐标系的旋转 四元数
2 2 ( q2 3 + q4 ) - 1
2 ( q1 q2 - q3 q4 ) 2 ( q1 q3 + q2 q4 )
2. 2 地磁场模型 基本磁场在地球以外的空间是位势场 , 磁位势
V 满足拉普拉斯方程 , 在球坐标系中用球谐函数可
(4)
欧拉角与四元数满足 2 ( q2 q3 + q1 q4 ) t an φ = ; 2 2 ( q2 3 + q4 ) - 1
Abstract : The at titude dyna mic s and kinematic s model during r ate damping was built with quate rnion for a t hree2 a xis stabilized micro2sa tellite in t his paper . Acco rding to the simple a nd conve nient projection of the geomagnetic field vector in the or bit ref ere nce f rame , a qua si propor tio nal plus de riva tive controller was de signe d with active magnetic cont rol. And t he magnetic dipole moment wa s analyzed. The simulation results of the micro2satellite rate damping showe d that the cont rol method wa s valid and wa s very usef ul for application. Keywor ds: Thr ee2 a xis sta bilized micro2sa tellite ; Ac tive magnetic control ; Quate rnion ; Qua si proportional plus derivative control ; Ra te damping
三轴姿态控制仿真系统快速自动精确调平方法及仿真

c o m e n s a t i n m e t h o d b e i n a n d a l s o w i t h t h e a u t o m a s s i v e n p g g g b a l a n c i n s s t e m h a r d w a r e b e i n d e s c r i b e d .A n e x e r i m e n t w a s g y g p t o i l l u s t r a t e t h e m e t h o d e f f i c i e n c t o s h o w t h a t t h e e r f o r m e d y p d i s t u r b a n c e t o r u e c a n r a i d l b e r e d u c e d f r o m 1 0mNm l e v e l t o l e s s q p y ,w 1 mNm l e v e l h i c h m e e t s t h e n e e d o f s a c e c r a f t t h a n r o u n d p g a t t i t u d e c o n t r o l s i m u l a t i o n s . : ;m ; K e w o r d s a t t i t u d e c o n t r o l a s s b a l a n c i n 3 a x i s a i r b e a r i n t e s t - - g g y b e d
] 2 6 - 。 然而这些自动调平方法往往用时较长 , 出[ 如美 [] 国海军研究生院的 K 或者我国的 i m 提出的方法 6 , 7] 包刚 等 学 者 [ 研 究 的 气 浮 台 自 动 调 平 的 方 法, 需要
一种卫星在轨自主三轴快速机动控制方法
专利名称:一种卫星在轨自主三轴快速机动控制方法
专利类型:发明专利
发明人:刘萌萌,李峰,钟兴,戴路,徐开,范林东,张洁,孙冰,孟祥强
申请号:CN202111354472.3
申请日:20211116
公开号:CN113968362A
公开日:
20220125
专利内容由知识产权出版社提供
摘要:一种卫星在轨自主三轴快速机动控制方法,涉及航天器姿态确定控制技术领域,解决现有卫星需要三轴机动时快速性与稳定性的矛盾问题,本发明包括期望姿态计算;三轴姿态规划和快速机动控制三个过程,通过本发明的卫星在轨自主三轴快速机动控制后,针对海上搜救、灾后广域搜救、应急地理勘察等应急任务时,保证卫星快速获取数据,同时保证成像的稳定性,获取高质量图像数据。
从而提高低轨遥感卫星的成像能力,确保了在轨采集的图像数据的高时效性。
申请人:长光卫星技术有限公司
地址:130032 吉林省长春市北湖科技开发区明溪路1299号
国籍:CN
代理机构:长春众邦菁华知识产权代理有限公司
代理人:朱红玲
更多信息请下载全文后查看。
神舟飞船的自动控制原理

神舟飞船的自动控制原理
神舟飞船的自动控制原理主要包括惯性导航系统、姿态控制系统和自动驾驶系统。
1. 惯性导航系统:神舟飞船搭载惯性测量单元,包括加速度计和陀螺仪等传感器。
这些传感器可以测量飞船在三个维度上的加速度和角速度变化。
通过对这些数据的处理和积分计算,可以得到飞船当前的速度、位置和姿态信息,从而实现导航定位功能。
2. 姿态控制系统:神舟飞船的姿态控制系统通过推进剂的喷射调整飞船的姿态,以保持特定的飞行方向和姿态。
该系统由姿态传感器、推进剂和推进剂控制系统组成。
姿态传感器可以检测飞船的姿态变化,将这些数据传输给推进剂控制系统。
推进剂控制系统根据姿态传感器的数据,计算并控制推进剂的喷射来调整飞船的姿态。
3. 自动驾驶系统:神舟飞船的自动驾驶系统可以通过预设的指令和控制算法来实现自动控制飞行任务。
该系统由飞行控制计算机、导航系统和控制器等组成。
飞行控制计算机负责处理和计算导航系统和姿态控制系统的数据,根据预设的指令和控制算法,生成相应的控制信号,通过控制器控制各个系统的运行。
自动驾驶系统可以实现飞船的自主导航、姿态控制和任务执行等功能。
以上是神舟飞船的自动控制原理的基本介绍,该系统的高度自动化和精确控制是保证神舟飞船顺利完成各项任务的重要保障。
第五章 三轴稳定航天器的姿态控制
& =u JΩ y
反作用轮的控制模式
z 动量模式 z轮子的输入是期望的控制角动量 z没有摩擦力矩的问题,但需要对电机转速进行精确测量
轮系的安装与操纵
h1 期望姿态 H
⋅
⋅
h2
⋅
飞轮 1 飞轮 2 飞轮 3 飞轮 4 敏感器
h
⋅
控制器
C+
h
⋅
h3 h4
⋅
C
H
⋅
航天器
⋅
姿态
⎡ h1 ⎤ ⎡H x ⎤ ⎢h ⎥ ⎥ = Ch = C ⎢ 2 ⎥ H =⎢ H ⎢ y⎥ ⎢ h3 ⎥ ⎢ ⎢ ⎥ ⎣Hz ⎥ ⎦ ⎣h4 ⎦
5.2.2 喷气姿态稳定系统的控制律 研究工具和数学模型 基于位置反馈的继电控制律 基于位置和速度反馈的死区继电控制律 含超前校正网络的死区迟滞继电控制律 准线性喷气推力器 极限环的特点与设计
研究工具和数学模型 研究工具
经典方法
z 相平面法 z 描述函数法
数学模型
现代方法
动态响应
z 机动时间或机动速度
5.1.3 主动控制系统的分类 零动量系统 喷气推力器 飞轮 控制力矩陀螺 偏置动量系统 固定偏置动量系统(WHECON) 单自由度动量系统 两自由度动量系统
零动量姿态控制系统
整星动量
z 标称状态下整星动量为零 z 多用于对姿态稳定度要求较高的卫星,如遥感卫星
§5.4 偏置动量姿态控制 5.4.1 5.4.2 5.4.3 5.4.4 5.4.5 5.4.6 基本思想 ¼轨道原理 姿态动力学模型 俯仰运动控制 滚动/偏航运动分析 滚动/偏航运动控制
5.4.1 基本思想
偏置动量稳定方式由双自旋卫星的稳定方式引伸而来
圆饼卫星三轴姿态控制
圆饼卫星三轴姿态控制
李太玉;张育林
【期刊名称】《系统工程与电子技术》
【年(卷),期】2002(024)011
【摘要】利用卫星低轨道两个主要环境力矩(重力梯度矩和地磁力矩)对卫星三轴姿态进行控制.卫星的形状为圆饼状,用以获得所需的重力梯度矩.卫星上的永久磁棒获取所需的地磁力矩.为了提高卫星的姿态精度,沿永久磁铁方向安装一反作用飞轮.对卫星在圆轨道的姿态进行了分析,并给出仿真结果.从分析和仿真结果可以看出,此卫星具有结构简单、姿态稳定、精度高等优点.
【总页数】3页(P37-38,122)
【作者】李太玉;张育林
【作者单位】国防科技大学航天与材料工程学院,湖南,长沙,410073;国防科技大学航天与材料工程学院,湖南,长沙,410073
【正文语种】中文
【中图分类】V448.2
【相关文献】
1.基于特征模型的力矩受限卫星三轴姿态控制 [J], 于海祥;雷拥军
2.一种偏置动量卫星的三轴姿态控制方法 [J], 吴丹
3.三轴稳定微小卫星主动磁阻尼姿态控制 [J], 张利宾;杨旭;杨涤
4.三轴稳定卫星姿态控制周期的仿真研究 [J], 见永刚;王治强;张斌
5.基于三轴气浮台的卫星姿态控制系统物理仿真 [J], 刘超;何平;李岐;华楠
因版权原因,仅展示原文概要,查看原文内容请购买。
一种偏置动量卫星的三轴姿态控制方法
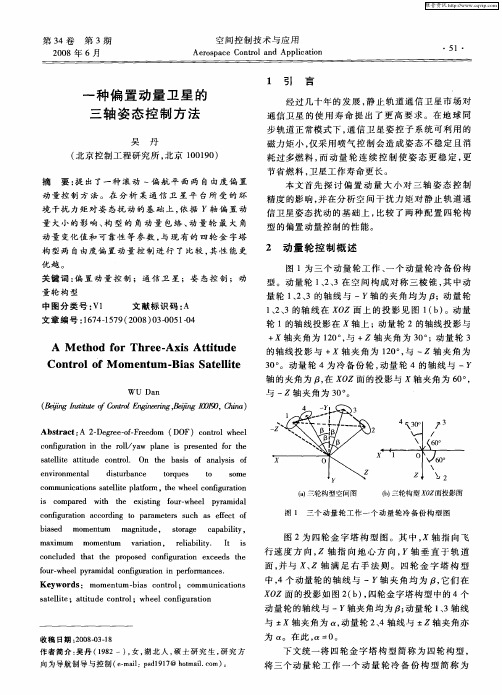
图 1 三个 动量 轮工 作 一 个 动 量 轮 冷 备 份 构 型 图
图 2为 四轮 金 字塔 构 型 图。其 中 , 轴指 向飞 行速度 方 向 , z轴 指 向地 心方 向 ,, I 轴垂 直 于 轨 道 面 , 与 、 轴 满 足 右 手 法 则 。 四 轮 金 字 塔 构 型 并 z
\ / ,_
{
.
。
.
’
、,
1
0 、
.
\2 J
c mmu i a i n a e l e p a f r ,t e wh e o fg r to o n c to s s t l t l t m i o h e lc n u a i n i
动 量控 制 方 法 。 在 分 析 某 通 信 卫 星 平 台 所 受 的 环
境 干扰 力 矩 对 姿 态 扰 动 的 基 础 上 , 据 y轴 偏 置 动 依 量 大小的影 响、 型 的 角动 量 包络 、 量轮 最 大 角 构 动
信卫 星姿态 扰动 的基 础 上 , 比较 了两 种配 置 四 轮构
吴 丹
经过 几十 年的 发展 , 止 轨道 通 信 卫星 市场 对 静
通信 卫 星 的使 用 寿 命 提 出 了更 高要 求 。在 地 球 同 步轨 道正 常模式 下 , 通信 卫 星姿控 子 系 统可 利 用 的 磁力 矩小 , 仅采 用喷气 控 制 会 造成 姿 态 不稳 定 且消
耗过 多燃 料 , 动 量 轮 连 续 控 制 使 姿 态 更 稳 定 , 而 更
(ei stefCn o Eg e i , Bl gI tu t l ni en j n it o o r n rg n
1 1 , h a 0 9 Ci ) 90 n
三轴稳定卫星姿态确定及控制系统的研究
三轴稳定卫星姿态确定及控制系统的研究一、本文概述随着航天技术的飞速发展,三轴稳定卫星已成为现代空间科技领域的重要组成部分。
这类卫星通过其精确的姿态确定及控制系统,实现了在太空环境中的稳定运行和高效工作。
本文旨在深入研究三轴稳定卫星的姿态确定及控制系统,探讨其工作原理、技术挑战以及优化策略,为未来的卫星设计与控制提供理论支持和实践指导。
本文首先将对三轴稳定卫星的基本概念和特点进行介绍,明确研究背景和目的。
随后,将详细分析卫星姿态确定的基本原理和方法,包括传感器技术、数据处理算法以及姿态估计理论等。
在此基础上,将探讨控制系统的设计原则和实现方式,包括姿态控制策略、执行机构选择以及控制算法优化等。
本文还将对三轴稳定卫星姿态确定及控制系统中的关键技术进行深入剖析,如姿态传感器误差补偿、控制算法鲁棒性增强以及卫星在轨自主定姿等。
将结合国内外相关研究成果,对现有的姿态确定及控制技术进行总结和评价,指出存在的问题和改进方向。
本文将提出一种优化的三轴稳定卫星姿态确定及控制系统设计方案,通过仿真实验和实地测试验证其有效性和可行性。
这一方案将为未来卫星的设计和制造提供有益的参考,推动航天技术的持续进步和发展。
二、三轴稳定卫星姿态确定原理三轴稳定卫星的姿态确定是其控制系统中的核心环节,它涉及到卫星在空间中的方向感知和姿态调整。
三轴稳定卫星的姿态确定原理主要基于惯性测量单元(IMU)和星敏感器(Star Tracker)等传感器的数据融合处理。
惯性测量单元(IMU)是卫星姿态确定的基础设备,它通过内部的陀螺仪和加速度计来测量卫星的角速度和加速度,进而推算出卫星的姿态变化。
然而,由于IMU的长期误差积累,单纯依赖IMU进行姿态确定无法满足长时间、高精度的要求。
因此,需要引入星敏感器(Star Tracker)等光学传感器进行辅助。
星敏感器通过拍摄星空图像,识别出已知的天体位置,进而解算出卫星的姿态。
这种方式的优点是精度高、误差积累小,但其缺点是受到观测条件的限制,例如在地球阴影区、太阳光照强烈等情况下,星敏感器可能无法正常工作。
三轴稳定的对地观测卫星姿态控制系统
三轴稳定的对地观测卫星姿态控制系统
姚国正;赵松年
【期刊名称】《世界科学》
【年(卷),期】1992(000)006
【摘要】一、引言从第一颗人造卫星上天至今,全世界30余年来大约发射了4000多个航天器(其中美、苏占90%以上)。
它们在军事、经济、科研等方面所发挥的重大作用表明:在高技术中,航天技术具有无可争辩的重要地位。
加强国威、保卫国家安全的有效途径之一,就是发展航天事业。
实际上,世界各国都是这样做的;甚至连日本也制定了雄心勃勃的空间计划。
我国20多年来,已成功地研制发射了30颗各种类型的人造卫星。
【总页数】4页(P39-42)
【作者】姚国正;赵松年
【作者单位】不详;不详
【正文语种】中文
【中图分类】V474.1
【相关文献】
1.三轴稳定飞行器姿态控制系统混合LQR-H∞控制器设计 [J], 齐晓鹏;王洁;时建明;王荔
2.国外对地观测卫星高精度姿态控制系统研究 [J], 施少范
3.三轴稳定拦截器常值推力姿态控制系统优化设计 [J], 赵畅;李小兵;万少松
4.基于模糊PID控制算法的微小型三轴稳定平台 [J], 徐文武; 李孟委; 张鹏
5.卫星姿态控制系统的实时动态测试和故障分析——CAMAC 在卫星姿态控制系统测试中的应用 [J], 王南华;倪行震;杨斌臣
因版权原因,仅展示原文概要,查看原文内容请购买。
第五章 三轴稳定航天器的姿态控制
§5.4 偏置动量姿态控制 5.4.1 5.4.2 5.4.3 5.4.4 5.4.5 5.4.6 基本思想 ¼轨道原理 姿态动力学模型 俯仰运动控制 滚动/偏航运动分析 滚动/偏航运动控制
自动控制原理实验-卫星三轴姿态控制系统
自动控制理论实验报告人:赵振根02020802班2008300597卫星三轴姿态飞轮控制系统设计一:概述1.1.坐标系选择与坐标变换在讨论卫星姿态时,首先要选定空间坐标系,不规定参考坐标系就无从描述卫星的姿态,至少要建立两个坐标系,一个是空间参考坐标系,一个是固连在卫星本体的星体坐标系。
在描述三轴稳定对地定向卫星的姿态运动时,一般以轨道坐标系为参考坐标系,还有星体坐标系。
(1) 轨道坐标系o o o O X Y Z -,原点位于卫星的质心O ,o O X 轴在轨道平面上与o OZ 轴垂直,与轨道速度方向一致,o OZ 轴指向地心,o O Y 轴垂直于轨道平面并构成右手直角坐标系(2) 星体坐标系b b b O X Y Z -,原点位于卫星的质心O ,b O X ,b O Y ,bOZ 固连在星体上,为卫星的三个惯性主轴。
其中b O X 为滚动轴,b O Y为俯仰轴,OZ为偏航轴。
b1.2 飞轮控制系统在卫星三轴姿态控制中的应用与特点长寿命,高精度的三轴姿态稳定卫星,在轨道上正常工作时,普遍采用角动量交换装置作为姿态控制系统的执行机构。
与喷气推力器三轴姿态稳定系统相比,飞轮三轴姿态稳定系统具有多方面的有点:(1)飞轮可以给出较为精确地连续变化的控制力矩,可以进行线性控制,而喷气推力器只能作为非线性开关控制,因此轮控系统的精度比喷气推力器的精度高一个数量级,而姿态误差速率也比喷气控制小。
(2)飞轮所需要的能源是电能可以不断地通过太阳能电池在轨得到补充,因而适用于长寿命工作,喷气推力器需要消耗工质或燃料,在轨无法补充,因而寿命大大受限。
(3)轮控系统特别适用于克服周期性扰动。
(4)轮控系统能够避免热推力器对光学仪器的污染。
然而,轮控系统在具有以上优越性的同时,也存在两个主要问题,一是飞轮会发生速度饱和。
当飞轮朝着一个方向加速或偏转以克服某一方面的非周期性扰动时,飞轮终究要达到其最大允许转速。
二是由于转速部件的存在,特别是轴承寿命和可靠性受到限制。
三轴控制系统的定义和功能
三轴控制系统的定义和功能The three-axis control system is a fundamental component in various engineering applications, particularly in robotics, automation, and aerospace technologies. This system comprises three independent axes of control, each responsible for managing a specific dimension of movement or operation. These axes work in concert, enabling precise and coordinated actions across multiple degrees of freedom.三轴控制系统是众多工程应用中的基本组成部分,特别是在机器人技术、自动化技术和航空航天技术中。
该系统由三个独立的控制轴组成,每个轴负责管理一个特定的运动或操作维度。
这些轴协同工作,实现多个自由度上的精确和协调动作。
The primary function of the three-axis control system is to provide directional control and stability. By regulating the motion along each axis, the system ensures that complex tasks can be executed with high precision and repeatability. This precision is crucial in applications that require fine manipulation, such as assembly lines or surgical robots. Additionally, the system maintains stability by compensating for external disturbances or variations in the operating environment.三轴控制系统的主要功能是提供方向控制和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制理论实验报告人:赵振根02020802班2008300597卫星三轴姿态飞轮控制系统设计一:概述1.1.坐标系选择与坐标变换在讨论卫星姿态时,首先要选定空间坐标系,不规定参考坐标系就无从描述卫星的姿态,至少要建立两个坐标系,一个是空间参考坐标系,一个是固连在卫星本体的星体坐标系。
在描述三轴稳定对地定向卫星的姿态运动时,一般以轨道坐标系为参考坐标系,还有星体坐标系。
(1) 轨道坐标系o o o O X Y Z -,原点位于卫星的质心O ,o OX 轴在轨道平面上与o OZ 轴垂直,与轨道速度方向一致,o OZ 轴指向地心,o OY 轴垂直于轨道平面并构成右手直角坐标系(2) 星体坐标系b b b O X Y Z -,原点位于卫星的质心O ,b OX ,b OY ,bOZ 固连在星体上,为卫星的三个惯性主轴。
其中b OX 为滚动轴,b OY为俯仰轴,OZ为偏航轴。
b1.2 飞轮控制系统在卫星三轴姿态控制中的应用与特点长寿命,高精度的三轴姿态稳定卫星,在轨道上正常工作时,普遍采用角动量交换装置作为姿态控制系统的执行机构。
与喷气推力器三轴姿态稳定系统相比,飞轮三轴姿态稳定系统具有多方面的有点:(1)飞轮可以给出较为精确地连续变化的控制力矩,可以进行线性控制,而喷气推力器只能作为非线性开关控制,因此轮控系统的精度比喷气推力器的精度高一个数量级,而姿态误差速率也比喷气控制小。
(2)飞轮所需要的能源是电能可以不断地通过太阳能电池在轨得到补充,因而适用于长寿命工作,喷气推力器需要消耗工质或燃料,在轨无法补充,因而寿命大大受限。
(3)轮控系统特别适用于克服周期性扰动。
(4)轮控系统能够避免热推力器对光学仪器的污染。
然而,轮控系统在具有以上优越性的同时,也存在两个主要问题,一是飞轮会发生速度饱和。
当飞轮朝着一个方向加速或偏转以克服某一方面的非周期性扰动时,飞轮终究要达到其最大允许转速。
二是由于转速部件的存在,特别是轴承寿命和可靠性受到限制。
1.3 飞轮姿态控制原理从动力学角度看,卫星姿态运动时卫星角动量作用的结果,飞轮则是通过与卫星间的角动量的交换来实现姿态控制,要使卫星在轨道上保持三轴稳定并对地定向。
卫星的角动量H应该不变,且方向与轨道平面。
卫星的角动量H 由星体角动量L 和飞轮控制系统的角动量1L 组成,由于飞轮控制系统存在饱和问题,需要有第二个控制系统进行卸载饱和,可以是喷气推力器或磁力器,所以卫星受到一个外控制力矩c M 的作用,同时由于空间环境影响,卫星受到干扰力矩d M 的作用。
由动量矩定理得:1c d dL dLM M dt dt=-++ (1—1) 在外力矩作用下,星体角动量变化是上式的积分。
110()(0)(0)()t tc d L t L L L t M M =+-++⎰⎰ (1—2)而飞轮控制力矩由内控制力矩c T 和摩擦力矩f T 组成力矩方程为11c f dL T T dt =+ (1-3) 飞轮作用的力矩c T ,f T 并不改变星体系统的总的角动量,仅重新分配了两者间的角动量。
1.4 飞轮控制系统分类在三轴姿态控制系统设计中,根据系统在标称状态下整星在角动量是否为零,可以将飞轮控制系统分为零动量系统和偏置动量系统,对姿态稳定度要求高的卫星如遥感卫星,采用零动量系统的比较多,而在对指向精度要求比较高的地球静止轨道卫星中,偏置动量系统用的比较多。
在这里,我们主要考虑零动量飞轮控制系统设计。
二:零动量飞轮三轴姿态控制系统数学模型2.1卫星中飞轮安装结构飞轮安装结构划分为三种,即正交型,俯仰轴安装反作用轮和斜装型。
每种安装形式的飞轮在应用时一般首先考虑系统的可靠性,要求飞轮有合理的布局,合理的布局不但可以提高系统的可靠性,而且可以减轻质量,节省能量,提高飞轮的角动量存储能力。
提高飞轮系统的可靠性的一个重要途径是给飞轮系统一定的备份,即要求系统有一定的冗余度。
本文中采用的安装构型为:四个反作用飞轮相对三轴等倾角安装。
与星体坐标系b b b O X Y Z -的三个轴互相平行,第四个反作用飞轮相对于三个轴等倾角安装,安装角为54.7α︒=。
正常工作状态下为三个正交的反作用轮工作,斜装轮为备份轮。
飞轮安装方式如图2.2 飞轮控制数学模型采用飞轮控制卫星的三轴姿态时,可以分为三个通道进行控制,俯仰通道,偏航通道和滚转通道,由于在控制一个通道使得卫星姿态发生变化的过程中,卫星的其他通道会存在严重的耦合,但是,在姿态稳定期间,卫星姿态角变化很小的情况下,我们可以把通道之间的耦合除去,这样,对系统的分析影响并不是很大。
设卫星在轨时原始的姿态角为:俯仰角为ϕ,偏航角为ψ,滚转角为θ,由于卫星在空间运动时,受到控制干扰力矩的作用,使得卫星的姿态发生了变化,其期望的俯仰角为1ϕ,期望的偏航角为1ψ,期望的滚转角为1θ,为了实现姿态角的变化,可以先控制俯仰角的变化,再控制偏航角的变化,为了简化控制系统设计,同时减弱系统中各个通道之间的相互耦合作用,可以每次控制使用一个轴上的飞轮进行卫星的姿态角的控制,由与控制中三个角度之间有一定的约束关系,可以通过俯仰通道和偏航通道的控制大致实现卫星滚转角度的控制,由于存在一定的误差,可以在实现俯仰角和偏航角的控制之后,对卫星的滚转角控制,这样通过三次不同通道的控制,能够实现卫星姿态稳定和机动的低精度控制。
下面以卫星俯仰通道角度控制为例。
俯仰通道数学模型Step1:建立俯仰姿态角控制的系统图Step2:建立各个控制模块的传递函数。
1.角度转换放大模块:功能:将系统所需要实现的角度变化信号转化为放大的能实现电机驱动的电信号。
传递函数2.伺服电动机模块:功能:给电动机一个电压信号,通过电动机输出一个转矩驱动飞轮转动,表现为飞轮角度的变化。
传递函数模型:3 飞轮与星体动量交换模块功能:将电动机作用于飞轮上的力矩,使得飞轮的角动量发生变化,由于系统的总动量保持不变,这样,就能将飞轮的角动量传递到星体的角动量的变化,从而使得星体的俯仰角发生变化。
实现系统设计输入时的姿态角。
传递函数:不考虑卫星各个通道之间的相互耦合作用,飞轮控制动力学方程可以简化为22122m x x cx dx d d I J M M dt dtθϕ=-++ (2—1)这是一个非线性环节,要进行线性化,由于喷气或磁控系统的控制力相对于飞轮控制系统很小,而且由于空间干扰力矩的存在,在飞轮正常情况下,飞轮速度未达到速度饱和时,我们可以将第二控制力矩和空间干扰力矩看成近似抵消,不考虑系统设计过程中传递函数的增益符号,这样飞轮动量交换系统的传递函数可以简化为。
4 将卫星星体俯仰角输出角度信号反馈到伺服电动机输入信号上。
外加一个比例环节,可以进行反馈的强弱调节。
传递函数模型: ()m U s5 传感器模块功能:将控制器输出的角度信号测量出来和系统输入的期望角度信号作比较,形成误差信号,通过转换和放大驱动电动机带动飞轮转动,再通过动量交换装置使得卫星俯仰角实现预定规律。
传递函数1()s ϕ ()m s ϕStep3:Step4:控制系统参数设置 伺服电动机参数电动机传递系数 220.1 1.1()0.1 1.110e s ss s s +Φ=++,在实验中取10m K =电动机时间常数/()m m m w T J f C =+在试验中取,0.1m T =。
角度信号放大器的倍数一般在10到1000之间,在实验中取:1100K =测速发动机的传递函数系数取: 1t K = 飞轮动量交换机构的传递系数:22//g x x x K J I mr M R ==近似的取:1100g K =所以控制系统的方框图可以化简为:控制系统的开环传递函数为:0210()0.1 1.1G s s s=+ 闭环传递函数为: 210()0.1 1.110s s s Φ=++ 系统的误差传递函数为:220.1 1.1()0.1 1.110e s ss s s +Φ=++三:Matab 分析和验证3.1 时域分析法3.11使用simulink 控制系统仿真建立的方框图如图3.1n1=[10]; d1=[0.1 1.1 10]; s1=tf(n1,d1); step(s1)系统的超调量为: 1.131%100%13%1δ-=⨯= 系统的稳态误差2%调节时间为: 0.8s t s = 3.12控制系统的稳定性分析 控制系统的闭环特征方程为:2()0.1 1.110D S S S =++建立系统的劳斯表为:210.1101.110S SS由于劳斯表的第一列元素全为正数,所以控制系统是稳定的。
3.13 系统稳态性能计算由于系统的开环传递函数为:010()(0.1 1.1)G s s s =+系统为Ⅰ型系统,控制系统对位置信号的稳态误差为零,对速度输入信号存在稳态误差,但是系统无法跟踪上加速度输入信号,对其稳态误差为五穷大。
00ess =19.9v ess =2ess =∞3.2 控制系统频域分析3.21 编程画出系统的波特图n1=[10];d1=[0.1 1.1 0]; s1=tf(n1,d1); margin(s1);[GM,pm,wcp,wcg]=margin(s1)系统的波特图如图3.3由波特图求得系统性能指标:幅值裕度GM =Inf 穿越频率wcp = Inf 相角裕度pm = 55.6831 截止频率wcg =7.5085 3.23 作出系统奈氏图和稳定性分析系统的奈奎斯特图如图3.4n1=[10]; d1=[0.1 1.1 0]; s1=tf(n1,d1); nyquist(s1) nyqusit(s1,w);由奈奎斯特图知,因为奈奎斯特曲线不包含(-1,j0)点,且系统开环稳定,系统右半平面开环极点p=0,所以系统是稳定的。
3.3根轨迹分析系统参数对系统的影响。
3.31放大器的倍数1K系统的闭环传递函数为:121()11K s S S K Φ=++其等价根轨迹方程为: 1211011K S S+=+ G=zpk([],[0,-11],1); rlocus(G)由系统的根轨迹图知,只要1K >0系统都是稳定的。
当信号转换与放大器的放大倍数1K =61.73时,系统获得最佳阻尼比。
3.32.动量交换结构传递系数g K 系统的闭环传递函数为: 21000()0.1(110)1000gg gK s S K S K Φ=+++其等价根轨迹方程为:2101000100.1g s K S S++=+由上面的根轨迹图得出:当系统的动量传递系数为g K =100时,系统的阻尼比为ς=0.551,当g K =179时,系统的阻尼比为0.707,此时,系统的阻尼性最好,动态性能最好,系统的超调量为% 4.3%δ=四:控制系统校正设计为了增加系统容噪声的能力,在角度信号转换放大器的后面需要增加一个滤波器,同时,因为电机控制时存在一系列的干扰信号,如负载转矩变化,电压变化等,故实际的俯仰角控制系统的方框图图4.1 修正卫星俯仰角控制方框图4.1系统滤波器的电路实现:()()()()()()dUo t Ui t RCUo t dtUi s Uo s RCsUo s =+=+ ()1()()1o Uo s G s Ui s RCs ==+取R=1M Ω ,C=0.1uf ,则传递函数为:1()0.11o G s s =+ 画出加滤波器的系统的奈氏图与Bode 图求得其频域性能指标为:幅值裕度GM = 7.4dB 穿越频率wcp = 10.4881 相角裕度pm = 26.0845 截止频率wcg = 6.5397系统是稳定的,但是系统的幅值裕度和相角裕度都比较小,所以要进行校正网络设计,使用串联校正能满足指标要求。