Abstract Fuzzy Sets and Systems 118 (2001) 479–487 Cardinality concepts for type-two fuzzy
Vague集凝熵的注记
(4) 设 A = [t A 1 - f A]和 B = [t B 1 - f B], 令 mA = 1 - tA - fA, mB =
还有中立情况, 按直觉判断,A 的模糊性肯定比 B 的模糊性要 大。然而, 由上面结果可以看到 A 的模糊性比 B 的模糊性要 小, 这是不合理的。 针对上述不足, 文献[9]给出了一个改进的模糊熵计算方法去 避免文献[8]的不合理情况, 然而文献[10]也指出了文献[9]的一些 错误之处, 给出了一个新的计算方法如下: 已知一个 Vague 值 其中 0<k≤1。
集 的推广, 也是一种直觉的模糊集
一个真隶属函数 t( ) 和一个假隶属函数 f( ) 来描述其隶属度 v u v u 的边界, 这两个边界就构成[0, 1]中的一个子区间[t( ) , 1-f( ) ], v u v u 其中一个对象的支持度、 反对度和未知度分别为 t( ) 、 f( ) 和 v u v u 1-t( ) -f( ) , 这使得 Vague 集在处理不确定性信息时比传统 v u v u 的 模 糊 集 有 更 强 的 表 达 能 力 以 及 更 具 灵 活 性 [7]。 然 而 对 于 Vague 集的模糊熵的研究, 与 Fuzzy 集相比存在一定的困难, 原 因在于 Vague 集的模糊熵不仅来自 Vague 集本身的未知性, 而 且来自 Vague 集自身存在的不确定性, 如在投票模型中, 支持 者与反对者各占一半时, 人们很难做出合理判断。近年来, 虽 然已有一些学者提出 Vague 集模糊熵的概念并给出了 Vague 集模糊熵的构造方法, 但是他们对 Vague 集模糊熵的约束条件 有共识但也有分歧, 也就是 Vague 集的未知性和不确定性如何 有效合理地形成直觉客观的模糊熵还没有统一, 特别是如何 把不确定性因素转化为模糊熵的一部分, 因此 Vague 集模糊熵 也就没有一个全面严谨的界定, 其定义中的约束条件也应改 进。在文献 [8] 中给出了一个定理计算 Vague 集的模糊熵, 文 献 [9] 指出了其存在的不足之处, 并给出了 Vague 集模糊熵的
Fuzzy Systems and Control
Fuzzy Systems and Control Fuzzy systems and control are essential components of modern engineering and technology. These systems are designed to handle complex and uncertain information, making them suitable for a wide range of applications such as industrial automation, robotics, and decision-making processes. However, despite their potential, fuzzy systems and control face several challenges that need to be addressed. One of the main issues with fuzzy systems and control is their complexity. Developing and implementing these systems requires a deep understanding of fuzzy logic, control theory, and mathematical modeling. This complexity can be a barrier for engineers and researchers who are not familiarwith these concepts, limiting the widespread adoption of fuzzy systems and control in various industries. Another challenge is the lack of standardized methodologies for designing and evaluating fuzzy systems and control. Unlike traditional control systems, which have well-established design and analysis techniques, fuzzy systems and control lack a unified framework for development. This makes it difficult to compare different approaches and assess their performance, hindering the advancement of the field. Furthermore, the interpretability of fuzzy systems and control is a concern. While these systems excel at handling vague and imprecise information, their decision-making processes can be difficult to understand and interpret. This lack of transparency can leadto skepticism and reluctance to adopt fuzzy systems and control in critical applications where explainability is crucial. In addition, the integration of fuzzy systems and control with other technologies, such as machine learning and artificial intelligence, poses a significant challenge. While these fields have shown great promise in addressing complex problems, the combination of fuzzy systems and control with these technologies requires careful consideration of compatibility, scalability, and performance. Moreover, the real-time implementation of fuzzy systems and control in dynamic environments is a challenging task. These systems need to adapt to changing conditions and make decisions in a timely manner, which requires efficient algorithms and hardware support. Ensuring the reliability and robustness of fuzzy systems and control in such environments is a critical area of research and development. Despite thesechallenges, there are ongoing efforts to overcome them and advance the field of fuzzy systems and control. Researchers are working on developing simplified design methodologies and tools to facilitate the implementation of fuzzy systems and control in practical applications. Moreover, there is a growing interest in explainable artificial intelligence, which aims to enhance the interpretability of fuzzy systems and control and address the concerns related to transparency. Furthermore, advancements in hardware technology, such as the emergence of high-performance computing and edge computing, are enabling the real-time implementation of fuzzy systems and control in dynamic environments. These developments are paving the way for the integration of fuzzy systems and control with other emerging technologies, opening up new possibilities for their application in diverse fields. In conclusion, while fuzzy systems and control face several challenges, there are promising developments and research efforts aimed at addressing these issues. By overcoming the complexity, standardizing methodologies, improving interpretability, integrating with other technologies, and enhancing real-time implementation, the potential of fuzzy systems and control can be fully realized, leading to significant advancements in engineering and technology.。
PID流量控制
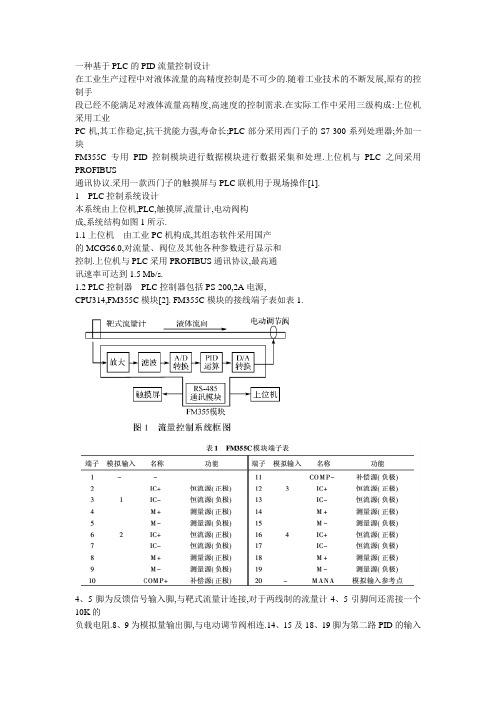
一种基于PLC的PID流量控制设计在工业生产过程中对液体流量的高精度控制是不可少的.随着工业技术的不断发展,原有的控制手段已经不能满足对液体流量高精度,高速度的控制需求.在实际工作中采用三级构成:上位机采用工业PC机,其工作稳定,抗干扰能力强,寿命长;PLC部分采用西门子的S7-300系列处理器;外加一块FM355C专用PID控制模块进行数据模块进行数据采集和处理.上位机与PLC之间采用PROFIBUS通讯协议.采用一款西门子的触摸屏与PLC联机用于现场操作[1].1PLC控制系统设计本系统由上位机,PLC,触摸屏,流量计,电动阀构成,系统结构如图1所示.1.1上位机由工业PC机构成,其组态软件采用国产的MCGS6.0,对流量、阀位及其他各种参数进行显示和控制.上位机与PLC采用PROFIBUS通讯协议,最高通讯速率可达到1.5 Mb/s.1.2 PLC控制器PLC控制器包括PS-200,2A电源,CPU314,FM355C模块[2]. FM355C模块的接线端子表如表1.4、5脚为反馈信号输入脚,与靶式流量计连接,对于两线制的流量计4、5引脚间还需接一个10K的负载电阻.8、9为模拟量输出脚,与电动调节阀相连.14、15及18、19脚为第二路PID的输入与输出.1.3传感器和动作机构流量采集采用数字靶式流量计,该种流量计采用累计计数的工作方式,1 s钟累计1次,工作范围40~1 000 L/h,对大流量的采集较为精确.V型调节球阀利用球芯转动与阀座打开相割打开面积(V形窗口)来调节介质流量,调节性能、自洁性能好,适用于高粘度、悬浮液、纸浆告示不干净、含纤维介质场合.采用直连方式与执行机构连接,具有结构紧凑、尺寸小、重量轻、阻力小、动作稳定可靠等优点.流量计和调节阀的信号范围为4~20 mA,与PLC连接.1.4触摸屏采用西门子的TD100触摸屏,与PLC通过PROFIBUS总线相连.使用PROTOOLS6.0编辑界面监控各种参数.当上位机出现故障时,触摸屏可替代上位机操作,提高了系统的可靠性.2PID算法当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其他技术难以采用时,系统控制器的结构和参数必须领先经验和现场调试来确定,这时应用PID控制技术最为方便,即利用比例、积分、微分计算出控制量进行控制[3].PID控制为3环节叠加,公式为:m(t) = Kpe(t)+Kpτde(t)dt+KiTi∫i0e(t)dt,其中Kp为比例系数,Kd为微分系数,τ为微分时间常数,Ki为积分系数.对于离散系统的PID公式为:P(k) = Kp{E(k)+TTi∑kj=0E(j)+TdT[E(k)-E(k-1)]}.3配置PID程序模块对西门子的PLC采用SIMA TIC STEP7 V5.3编程.进入STEP7的编程环境后首先通过“工程向导”配置硬件和网络参数,选用的电源模块为PS-200 2A ,中央处理器为CPU 314IFM,PID控制器为FM355 C型.完成配置后打开OB1主程序块(图2),调用FB31模块(STEP7中有LAD,STL ,FBD三种编程方式,STL为语句表编程方式,其他两种为图形调用方式).其中DB31为分配给FB31的背景块.FB31有如下几个参数必须设置:COM_RST参数地址DB31.DBX44. 0 BOOL型. FM355的启动开关.CHANNEL参数地址DB31.DBX2.0 BOOL型.控制端的通道号(每块FM355含两个通道).LMN_RE参数地址DB31.DBX52BOOL,参数类型为REAL型(32位浮点数).存储的是在未启动PID控制时的阀位值(即手动控制值),取值范围为0~100(系统将默认这些数值为电动阀的开度百分数),该参数在PID控制启动后不起作用.LMN_REON参数地址DB31.DBX6.4,参数类型BOOL型(在STEP7中为1位二进制数).当为1时PID控制关闭,LMN_RE的值作为输出值送给电动调节阀.当为0时,PID控制超作用,LMN_RE无效.PHASE参数地址DB31.DBD4,参数类型INT型(16位无符号整数).PID的相位控制,为1时控制相位反向180°.SP_RE参数地址DB31.DBD48,参数类型REAL型.PID 控制的设定值,取值范围为0~100(%).PID控制启动后模块通过计算该值与采集值的差值ER来改变输出值,仅当LMN_REON为0时有效.DEADB_W参数地址DB31.DBD104,参数类型REAL型.默认值为0,单位值为0,单位Hz.不工作区带宽设定值,差值ER将通过这个参数滤波.它关系到PID控制的性湖北大学学报(自然科学版)第28卷能.GAIN参数地址为DB31.DBD108,参数类型为REAL型.默认值为1.增益控制值,增益过大会提高系统的趋近速度,但同时会增大系统波动,导致系统不稳定.增益过小则会使系统的趋近速度变慢.TI参数地址为DB31.DBD112,参数类型REAL型.默认值为3000,单位s.积分时间常数.TI=0时,无积分环节.TD参数地址为DB31.DBD116,参数类型REAL型.默认值为0,单位s.微分时间常数.TD=0时,无微分环节.TM_LAG参数地址为DB31.DBD120,参数类型REAL型.默认值为5,单位s.微分时间延迟设置.LOAD_PAR参数地址为DB31.DBX44.3,参数类型为BOOL型.PID控制的启动开关,每次启动PID或改变PID参数后必须将此位置1,系统每次检查到此位为1,则将所有参数下载到FM355模块,然后将此位复位[4].4PID参数的调整方法PID参数的设置一方面是要根据控制对象的具体情况而定;另一方面是经验.Kp可控制幅值震荡,Kp大则会出现幅值震荡的幅度大,但震荡频率小,系统达到稳定时间长;Ki是解决动作响应的速度快慢的,Ki大了响应速度慢,反之则快;Kd是消除静态误差的,一般Kd设置都比较小,而且对系统影响比较小[5].5试验结论本系统在葛店的新武大有机硅厂通过测试.测试中流体采用甲醇,测试范围为50~250 L/h.以设定值为200 L/h的系统阶跃响应曲线为例,系统延迟时间td=3.5 s,上升时间tΓ=5 s,峰值时间tp=7 s,调节时间ts=28.5 s,超调量公式为:δ%=h(tp)-h(∞)h(∞)×100%,在试验中h(tp)=290,h(∞)=200,所以δ%=45%.经过调试后,本系统被证明完全能胜任有机硅生产过程中,对甲醇流量的精确控制. 参考文献:[1]周军,海心.电气控制及PLC[M].北京:机械工业出版社,2001:90 135.[2]余雷声,方宗达.电器控制与PLC应用[M].北京:机械工业出版社,1999:126 152.[3]陶永华,尹怕欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998.[4] Kember G, Dubay R. PID gain scheduling using fuzzy logic[J]. JSA Transactions, 2000,39(3):317 325.[5] Liu G P, Daley S. Optimal-tuning nonlinear PID controllers for unstable processes based on gain and phase marginspecifications: a fuzzy neural approach[J]. Fuzzy Sets and Systems, 2002: 128(1):95 106.The PID control system of flow measuring based on PLCXIAO Lei, XIE Ju-fang(School of Phisics and Electronic Technology, Hubei University, Wuhan 430062, China) Abstract:Described a kind of PID control system based on PIC. The system is composed of supervisor PC, PLC control block, the touch screen ,the flow measuring probe and the electrically operated valve. The system reads the flow measuring from the probe and then calculate the output value by using PID algorithm. The value output to the electrically operated valve to control the flow.The system also can be used in hard condition with high quality.Key words:flow measuring control system; PID; PLC; FM355C(责任编辑晏建章)。
《自动化学报》稿件编排规范
《自动化学报》稿件编排规范一.文章编排规范1.题名:论文文题通栏居中,短文文题单栏居中,字数一般不超过20字中文:中文黑体,副标题前加破折号后位于正标题下方缩进;英文:英文粗体,中文文章的英文文题位于中图分类号下方,文题中实词首字母大写,其余均小写。
副标题前不加破折号。
2.署名:论文作者姓名按照作者承诺签署顺序列举于题名下方通栏居中,短文单栏居中。
视作者人数调整作者姓名间距;来自多个单位的作者通过姓名右上角数字在篇首页脚中标识各自所属单位;英文:英文姓名位于英文文题下方,作者英文姓名姓全大写,单名首字母大写;双名两个汉字的拼音首字母均大写,两个汉字之间加连字符“-”,如 “LI Xiao-Ming”。
作者单位信息标识与中文标识方法一致。
3.摘要:论文中英文摘要通栏排于作者姓名下方,短文中英文摘要单栏排于作者信息下方。
论文摘要字数约为正文文字的字数的5%,一般论文的摘要字数不超过200字。
短文摘要字数约为正文文字字数的3%,一般短文的摘要字数不超过100字。
除了实在无变通办法可用以外, 中英文摘要中不出现插图、表格, 以及参考文献序号, 不用数学公式,不分段。
中文:“摘 要”二字黑体居左,空一个中文字符后接摘要文字。
英文:“Abstract”一词粗体居左,后空一个中文字符后接英文摘要文字。
中文文章英文摘要内容与中文摘要内容必须一致。
4.关键词:中英文关键词置于摘要段之后,论文关键词排通栏,短文关键词排单栏。
不同关键词之间以逗号分隔,一篇文章的关键词为3至5个。
关键词列举完毕后不加句号。
中文:中文“关键词”三字黑体居左,空一个中文字符后接关键词。
英文:“Key words”一词粗体居左,空一个中文字符后接英文关键词,关键词间以逗号分隔,第一个关键词首字母大写,其它首字母小写。
中英文关键词必须对应一致。
5.篇首页脚:篇首页页脚位于左侧栏目下方,与正文用横线分隔。
页脚先排中英文收稿日期和收修改稿日期,格式为“年-月-日”中英文收稿日期和收修改稿日期下方排中英文基金项目及其编号,不同基金项目中间用“,”分隔,项目名称后必须有项目编号,编号用括号括起。
LOGIC AND FUZZY SYSTEM Fuzzy Analogy of Linear Systems

LOGIC AND FUZZY SYSTEMLESSON 14:SYSTEMS OF FUZZY LINEAR EQUATIONSFuzzy Analogy of Linear SystemsAbstract: In this start up study fuzzy logic theory is incorporated into modelling of linearsystems whose parameters and variables subject to uncertainty.The major intention is to try to understand the complicated mathematical background and therefore the principles and formulations can be properly interpreted into transparent engineering implementation. Two examples are selected to illustrate the fuzzy analogy of linear systems to accommodate uncertainties due to imprecise measurements or lack of complete information.Key words: Fuzzy numbers, convex fuzzy sets, fuzzy analogy,and implementation algorithms.The main advantage of fuzzy models is their ability to describe expert knowledge in a descriptive, human like way, in the form of simple rules using linguistic variables. The theory of fuzzy sets (Zimmermann 2000) allows the existence of uncertainty to vagueness (or fuzziness) rather than due to randomness. When using fuzzy sets, accuracy is traded for complexity – fuzzy logic models do not need an accurate definition for many systems (in terms of the parameters). This results in a natural reduction in number of variables and states for an ad hoc system structure.Simultaneous linear equations play a major role in representing various systems in natural science, engineering, and social domain. Since in many applications at least some of the system’s parameters and measurements are represented byexpert experience in terms of fuzzy rather than crisp numbers, it is immensely important to develop mathematical models and numerical procedures that would appropriately deal with those general fuzzy terms.One of the major applications using fuzzy number arithmetics is treating those linear systems, which their parameters are entirely or partially represented by fuzzy numbers. A general model for solving a n fuzzy linear system whosecoefficients matrix is crisp and the right-hand side column is an arbitrary fuzzy number vector, which use the embedding method and replace the original linear fuzzy systemcrisp linear system with a matrix Swhich may be singular if A be nonsingular.The following contents are organised with five major sections.In section 2 some fundamental concepts and definitions are selected from classical fuzzy logic theory for treating fuzzy linear systems. In Section 3 fuzzy analogy method is presented to lay a basis for translating linear equations into their fuzzycounterparts. In Section 4 fuzzy solutions are described. InSection 5 two examples are used to demonstrate the algorithms.In section 6 the conclusions are drawn.2. PreliminariesAn arbitrary fuzzy number can be described with an ordered pair of functions where1. is a bounded left continuous non-decreasing functionover [0,1].2. is a bounded left continuous non-increasing function over [0,1].3.A crisp number a is simply representedbyDefinition 1 : Consider a nxnlinear system of equations= + · · · + +(2.1) may be expressed in a vector form(2.2)Expression (2.2) can be used as a Fuzzy Linear Equation (FLE),while . n x n matrix, and, ( are fuzzy vector, so called system transfermatrix, input, and output respectively in classical system notations.Let P denote the product and g be a mapping, which is The Extension Principle (Dubois 1980) states that g can be extended to five tuples (A, B, C, D, E)which are all fuzzy subsets ofas follows:Where sup is taken over allDefinition 2: A fuzzy set A of X is called convex if thefollowing relation holds:for any . A is said to be normalised if there exists an x such that A (x ) = 1. Theany. A is said to be normalised if thereexists an x such that A (x ) = 1. The a-level of a fuzzy subset A denoted by, if defined byA fuzzy set A can be shown to be convex if and only if its a cuts are intervals for all . Fuzzy set A can be defined by its acuts,wheredenotes the characteristic function of the setLOGIC AND FUZZY SYSTEMDefinition 3 Fuzzy number A is called a number of the R L .type if its membership functionhas the following form:where L and R are continuous non-increasing functions, defined on ), strictly decreasing to zero in those subintervals of the interval ) , in which they are positive, and fulfilling the condition The parameters a and â are non-negative real numbers.3. Fuzzy AnalogyIf X is the set of real numbers, by a fuzzy number x N , this means a fuzzy subset of X where •, if and only if y = x.•is continuous.• is convex.•vanishes at infinity..denotes the degree of belief that the value of x is infact y. Consider a class of functional equations of the formwhere f is unknown, may be either addition or multiplication of real numbers. (3.1) may be put in a generalformwhereis a function relating the unknownquantities stands for andstands forLet denote the degree of belief that x equals to y . Using extension principle (Dubois 1980), (3.2) can be expressed in thefuzzy formwhere the sup is taken over all y 1and y2 for whichAccording to Nguyen (1978), (3.3) and (3.1) may be the implies as following For the alevels are equalis a closed and bounded interval. Hence,,where are the left endpointand the right endpoint respectively associated with the a level of the fuzzy number w . If F is non-decreasing in its argument and Fis continuous, then it givesMoreover solutions to (3.5) and (3.6), say functions H 1and H2, respectively, are continuous and no-decreasing. ThusSo, the solution of (3.3) is given bywhere H 1 and H 2 are the solutions of (3.5) and (3.6),respectively. According to (3.3), the solution of (3.8) may alsobe represented bywhere the sup is taken over allis thecharacteristic function over the interval4. Fuzzy Solutions A solution tto (2.1) one should recall that forarbitrary fuzzy numbers and realnumber k ,•x = yif and only if•Definition 4: A fuzzy number vector givenby is called a solution ofthe FSLE ifConsider the ith equation of the system (2.1)it hasFrom (2.4) two crisp linear systems for all i that there can be extended to. crisp linear system as follows:LOGIC AND FUZZY SYSTEMThus FLE (2.1) is extended to a crisp (2.5) where A= S 2 + S 1.(4.5) can be write as follows:where the matrix S is nonsingular if and only if the matrices A=S1+S2 and S1-S2 are both non-singular.Definition 5: Let denote the unique solution of SX = Y . The fuzzy number vectoris defined byis called the fuzzy solution of SX = Y . Ifare all triangular fuzzy numbers thenand U is called a strongfuzzy solution. Otherwise, U is a weak fuzzy solution.In the general, the structure of S implies thatand thatWhere B contains the positive entries of A , C the absolute values of the negative entries of A , and A=B-C If linear system are fuzzy variables, for the inputsdenotes the degree of,inputThesolution of linear system are givenIf linear system are fuzzy coefficients and fuzzy variables, whichis in system (2.1)are fuzzy numbers, denotes the degree ofcoefficients and variable respectively.where so the solution of systemsAX = Yis5. Examples and SimulationsTwo examples were selected to demonstrate the understanding of the fuzzy of analogy of linear systems.Example 1:Consider a simple linear system B AX Y + = withfuzzy output and input variablesFig.1 shows a fuzzy line, which denotes what a line looks like with a fuzzy input.Example 2 :Consider a two inputs & single output fuzzy system with fuzzy outputsY = AX + B(5.3)Where .The extended 4 x 4 . matrix isThe fuzzy solution isFig.2 shows that variables x 1and x 2 are determined by the output y which is the ácut, when y = 1, an accurate value for thesolution can be obtained.LOGIC AND FUZZY SYSTEM6. ConclusionsIn this paper a general model structure is presented for solving of linear equations (systems) with fuzzy variables andparameters. With this structure, a fuzzy system with a matrix Ais transformed into a crisp linear system S . The system is then solved with crisp variables and parameters and thesolution vector is either a strong fuzzy solution or a weak fuzzy solution. Solutions of linear fuzzy equations have been well addressed in mathematics. However it is still a long distance to arrive in engineering field for applications. This study has attempted to bridge the two domains. Additionally fuzzy analogy of nonlinear systems is a new area and will be studied as the expansion of linear systems.References1.Zimmermann, H.J., Fuzzy Set Theory-and Its Applications,3rd Edition, Kluwer Academic Publishers, Dordrecht, 2000.2.Wang, L.X., Adaptive Fuzzy Systems and Control, New Jersey 07632, 1999.3.Klir, G.J., Folger, T.A., Fuzzy Sets, Uncerainty andInformation, Prentice-Hall, Englewood, Cli.s, NJ, 1988.4.Dubois, D., and Prade, H., Fuzzy Sets and Systems: Theory and Applications, Academic Press, New York, 1980.5.Deeba, E., On a fuzzy difference equation. IEEE Trans.Fuzzy Systems 3(3):469-472, 1995.6.Deeba, E., On a fuzzy logistic difference equation.Differential Equations Dynam. Systems 4(2):149-156, 19967.Deschrijver, G., On the relationship between someextensions of fuzzy set theory, Fuzzy Sets and Systems 133:227-235, 2003.8.Friedman, M., Fuzzy Linear Systems, Fuzzy Sets and Systems 96(2): 201-209, 1998.9.Soliman, S.A., Fuzzy linear parameter estimation algorithms:a new formulation, International Journal of Electrical Power & Energy Systems 24(5): 415-420, 200210.Nguyen, H.T., A note on the extension principle for fuzzy sets, J. Math. Anl. 64(2): 369-380, 1978Notes。
Fuzzy Logic and Systems
Fuzzy Logic and SystemsFuzzy Logic and Systems: A Comprehensive OverviewIn the realm of computational intelligence, fuzzy logic and systems have emerged as a powerful tool for dealing with uncertainty and imprecision. This essay aims to provide a comprehensive overview of fuzzy logic and its applications in various systems, highlighting the significance of this approach in modern technology.Introduction to Fuzzy LogicFuzzy logic, introduced by Lotfi A. Zadeh in 1965, is a mathematical logicthat deals with approximate reasoning. Unlike traditional binary logic, which is based on crisp values of true and false, fuzzy logic allows for a range of truth values between 0 and 1. This flexibility enables fuzzy logic to model human reasoning more accurately, particularly in situations where data is incomplete or ambiguous.Fundamentals of Fuzzy LogicAt the core of fuzzy logic is the concept of a fuzzy set, which is a generalization of a classical set. A fuzzy set is characterized by a membership function that assigns each element a degree of membership between 0 and 1. This degree reflects the extent to which an element belongs to the set. Fuzzy logic also employs linguistic variables, which are used to express concepts in a natural language-like manner, making it easier for humans to interact with the system.Fuzzy Logic OperationsFuzzy logic operations include fuzzy union, intersection, and complement. These operations are analogous to classical set operations but are adapted to handle the fuzzy nature of the membership values. The union of two fuzzy sets, for example, combines the membership values of their elements, while the intersectionfinds the minimum membership value among the elements of both sets. The complement operation inverts the membership values, assigning a value of 1 minus the original membership to each element.Applications of Fuzzy LogicFuzzy logic has found applications in a wide range of fields, includingcontrol systems, decision-making, and artificial intelligence. In control systems, fuzzy logic controllers (FLCs) are used to manage complex processes byinterpreting input data and generating appropriate control actions. FLCs are particularly useful in situations where traditional control methods struggle with non-linear or time-varying systems.In decision-making, fuzzy logic helps to address the uncertainty inherent in human judgments. By incorporating fuzzy sets and linguistic variables, decision-makers can create more nuanced and context-sensitive decision models. This approach is particularly valuable in fields such as finance, where decisions must be made with incomplete or uncertain information.Artificial intelligence also benefits from fuzzy logic, as it allows systems to process and interpret ambiguous or imprecise data. This capability is crucialfor developing systems that can interact with humans in a more natural andintuitive manner.Challenges and LimitationsDespite its many advantages, fuzzy logic also faces challenges and limitations. One of the primary concerns is the difficulty in designing and tuning fuzzy systems, particularly when dealing with complex problems. The process of determining appropriate membership functions and rule sets can be time-consuming and requires a deep understanding of the problem domain.Another challenge is the interpretability of fuzzy systems. While fuzzy logic can handle uncertainty and imprecision, it can sometimes be difficult for users tounderstand the reasoning behind the system's decisions. This lack of transparency can be a barrier to the widespread adoption of fuzzy logic in certain applications.Future DirectionsAs technology continues to advance, the role of fuzzy logic in systems is likely to grow. With the increasing prevalence of big data and the need to make sense of complex, uncertain information, fuzzy logic offers a valuable approach to processing and analyzing this data. Additionally, as systems become more integrated into our daily lives, the ability to handle ambiguity and uncertainty will be crucial for creating more human-like interactions.In the future, we can expect to see more research and development in the area of fuzzy logic, with a focus on improving the design and tuning processes, as well as enhancing the interpretability of fuzzy systems. This will help to overcome some of the current challenges and limitations, paving the way for even broader applications of fuzzy logic in various fields.ConclusionFuzzy logic and systems have proven to be a valuable tool for managing uncertainty and imprecision in a wide range of applications. From control systems to decision-making and artificial intelligence, fuzzy logic offers a flexible and powerful approach to dealing with complex problems. While challenges and limitations exist, ongoing research and development are likely to address these issues and further expand the potential of fuzzy logic in the years to come.In conclusion, fuzzy logic and systems represent an important area of study within the field of computational intelligence. As we continue to explore the potential of this approach, we can expect to see its influence grow, shaping the way we interact with technology and making our systems more adaptable and responsive to the complexities of the real world.。
PID流量控制
一种基于PLC的PID流量控制设计在工业生产过程中对液体流量的高精度控制是不可少的.随着工业技术的不断发展,原有的控制手段已经不能满足对液体流量高精度,高速度的控制需求.在实际工作中采用三级构成:上位机采用工业PC机,其工作稳定,抗干扰能力强,寿命长;PLC部分采用西门子的S7-300系列处理器;外加一块FM355C专用PID控制模块进行数据模块进行数据采集和处理.上位机与PLC之间采用PROFIBUS通讯协议.采用一款西门子的触摸屏与PLC联机用于现场操作[1].1PLC控制系统设计本系统由上位机,PLC,触摸屏,流量计,电动阀构成,系统结构如图1所示.1.1上位机由工业PC机构成,其组态软件采用国产的MCGS6.0,对流量、阀位及其他各种参数进行显示和控制.上位机与PLC采用PROFIBUS通讯协议,最高通讯速率可达到1.5 Mb/s.1.2 PLC控制器PLC控制器包括PS-200,2A电源,CPU314,FM355C模块[2]. FM355C模块的接线端子表如表1.4、5脚为反馈信号输入脚,与靶式流量计连接,对于两线制的流量计4、5引脚间还需接一个10K的负载电阻.8、9为模拟量输出脚,与电动调节阀相连.14、15及18、19脚为第二路PID的输入与输出.1.3传感器和动作机构流量采集采用数字靶式流量计,该种流量计采用累计计数的工作方式,1 s钟累计1次,工作范围40~1 000 L/h,对大流量的采集较为精确.V型调节球阀利用球芯转动与阀座打开相割打开面积(V形窗口)来调节介质流量,调节性能、自洁性能好,适用于高粘度、悬浮液、纸浆告示不干净、含纤维介质场合.采用直连方式与执行机构连接,具有结构紧凑、尺寸小、重量轻、阻力小、动作稳定可靠等优点.流量计和调节阀的信号范围为4~20 mA,与PLC连接.1.4触摸屏采用西门子的TD100触摸屏,与PLC通过PROFIBUS总线相连.使用PROTOOLS6.0编辑界面监控各种参数.当上位机出现故障时,触摸屏可替代上位机操作,提高了系统的可靠性.2PID算法当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其他技术难以采用时,系统控制器的结构和参数必须领先经验和现场调试来确定,这时应用PID控制技术最为方便,即利用比例、积分、微分计算出控制量进行控制[3].PID控制为3环节叠加,公式为:m(t) = Kpe(t)+Kpτde(t)dt+KiTi∫i0e(t)dt,其中Kp为比例系数,Kd为微分系数,τ为微分时间常数,Ki为积分系数.对于离散系统的PID公式为:P(k) = Kp{E(k)+TTi∑kj=0E(j)+TdT[E(k)-E(k-1)]}.3配置PID程序模块对西门子的PLC采用SIMA TIC STEP7 V5.3编程.进入STEP7的编程环境后首先通过“工程向导”配置硬件和网络参数,选用的电源模块为PS-200 2A ,中央处理器为CPU 314IFM,PID控制器为FM355 C型.完成配置后打开OB1主程序块(图2),调用FB31模块(STEP7中有LAD,STL ,FBD三种编程方式,STL为语句表编程方式,其他两种为图形调用方式).其中DB31为分配给FB31的背景块.FB31有如下几个参数必须设置:COM_RST参数地址DB31.DBX44. 0 BOOL型. FM355的启动开关.CHANNEL参数地址DB31.DBX2.0 BOOL型.控制端的通道号(每块FM355含两个通道).LMN_RE参数地址DB31.DBX52BOOL,参数类型为REAL型(32位浮点数).存储的是在未启动PID控制时的阀位值(即手动控制值),取值范围为0~100(系统将默认这些数值为电动阀的开度百分数),该参数在PID控制启动后不起作用.LMN_REON参数地址DB31.DBX6.4,参数类型BOOL型(在STEP7中为1位二进制数).当为1时PID控制关闭,LMN_RE的值作为输出值送给电动调节阀.当为0时,PID控制超作用,LMN_RE无效.PHASE参数地址DB31.DBD4,参数类型INT型(16位无符号整数).PID的相位控制,为1时控制相位反向180°.SP_RE参数地址DB31.DBD48,参数类型REAL型.PID 控制的设定值,取值范围为0~100(%).PID控制启动后模块通过计算该值与采集值的差值ER来改变输出值,仅当LMN_REON为0时有效.DEADB_W参数地址DB31.DBD104,参数类型REAL型.默认值为0,单位值为0,单位Hz.不工作区带宽设定值,差值ER将通过这个参数滤波.它关系到PID控制的性湖北大学学报(自然科学版)第28卷能.GAIN参数地址为DB31.DBD108,参数类型为REAL型.默认值为1.增益控制值,增益过大会提高系统的趋近速度,但同时会增大系统波动,导致系统不稳定.增益过小则会使系统的趋近速度变慢.TI参数地址为DB31.DBD112,参数类型REAL型.默认值为3000,单位s.积分时间常数.TI=0时,无积分环节.TD参数地址为DB31.DBD116,参数类型REAL型.默认值为0,单位s.微分时间常数.TD=0时,无微分环节.TM_LAG参数地址为DB31.DBD120,参数类型REAL型.默认值为5,单位s.微分时间延迟设置.LOAD_PAR参数地址为DB31.DBX44.3,参数类型为BOOL型.PID控制的启动开关,每次启动PID或改变PID参数后必须将此位置1,系统每次检查到此位为1,则将所有参数下载到FM355模块,然后将此位复位[4].4PID参数的调整方法PID参数的设置一方面是要根据控制对象的具体情况而定;另一方面是经验.Kp可控制幅值震荡,Kp大则会出现幅值震荡的幅度大,但震荡频率小,系统达到稳定时间长;Ki是解决动作响应的速度快慢的,Ki大了响应速度慢,反之则快;Kd是消除静态误差的,一般Kd设置都比较小,而且对系统影响比较小[5].5试验结论本系统在葛店的新武大有机硅厂通过测试.测试中流体采用甲醇,测试范围为50~250 L/h.以设定值为200 L/h的系统阶跃响应曲线为例,系统延迟时间td=3.5 s,上升时间tΓ=5 s,峰值时间tp=7 s,调节时间ts=28.5 s,超调量公式为:δ%=h(tp)-h(∞)h(∞)×100%,在试验中h(tp)=290,h(∞)=200,所以δ%=45%.经过调试后,本系统被证明完全能胜任有机硅生产过程中,对甲醇流量的精确控制. 参考文献:[1]周军,海心.电气控制及PLC[M].北京:机械工业出版社,2001:90 135.[2]余雷声,方宗达.电器控制与PLC应用[M].北京:机械工业出版社,1999:126 152.[3]陶永华,尹怕欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998.[4] Kember G, Dubay R. PID gain scheduling using fuzzy logic[J]. JSA Transactions, 2000,39(3):317 325.[5] Liu G P, Daley S. Optimal-tuning nonlinear PID controllers for unstable processes based on gain and phase marginspecifications: a fuzzy neural approach[J]. Fuzzy Sets and Systems, 2002: 128(1):95 106.The PID control system of flow measuring based on PLCXIAO Lei, XIE Ju-fang(School of Phisics and Electronic Technology, Hubei University, Wuhan 430062, China) Abstract:Described a kind of PID control system based on PIC. The system is composed of supervisor PC, PLC control block, the touch screen ,the flow measuring probe and the electrically operated valve. The system reads the flow measuring from the probe and then calculate the output value by using PID algorithm. The value output to the electrically operated valve to control the flow.The system also can be used in hard condition with high quality.Key words:flow measuring control system; PID; PLC; FM355C(责任编辑晏建章)。
Tutorial On Fuzzy Logic

Tutorial On Fuzzy LogicJan Jantzen<jj@oersted.dtu.dk>1AbstractFuzzy logic is based on the theory of fuzzy sets,where an object’s membership of a set is gradual rather than just member or not a member.Fuzzy logic uses the whole interval of real numbers between zero(False)and one(True)to develop a logic as a basis for rules of inference.Particularly the fuzzified version of the modus ponens rule of inference enables computers to make decisions using fuzzy reasoning rather than exact.Contents1Introduction2 2Fuzzy Set Theory22.1Fuzzy Sets22.2Fuzzy Set Operations8 3Fuzzy Logic133.1Propositions133.2Inference20 4Fuzzy Rules234.1Linguistic Variables244.2Modus Ponens Inference25 5Summary27 References281Technical University of Denmark,Oersted-DTU,Automation,Bldg326,2800Kongens Lyngby,DENMARK.Tech.report no98-E868(logic),revised17Jun2008.11IntroductionAn assertion can be more or less true in fuzzy logic.In classical logic an assertion is either true or false—not something in between—and fuzzy logic extends classical logic by allowing intermediate truth values between zero and one.Fuzzy logic enables a computer to interpret a linguistic statement such as’if the washing machine is half full,then use less water.’It adds intelligence to the washing machine since the computer infers an action from a set of such if-then rules.Fuzzy logic is’computing with words,’quoting the creator of fuzzy logic, LotfiA.Zadeh.The objective of this tutorial is to explain the necessary and sufficient parts of the theory, such that engineering students understand how fuzzy logic enables fuzzy reasoning by computers.2Fuzzy Set TheoryFuzzy sets are a further development of mathematical set theory,first studied formally by the German mathematician Georg Cantor(1845-1918).It is possible to express mostof mathematics in the language of set theory,and researchers are today looking at the consequences of’fuzzifying’set theory resulting in for example fuzzy logic,fuzzy numbers, fuzzy intervals,fuzzy arithmetic,and fuzzy integrals.Fuzzy logic is based on fuzzy sets, and with fuzzy logic a computer can process words from natural language,such as’small’,’large’,and’approximately equal’.Although elementary,the following sections include the basic definitions of classical set theory.This is to shed light on the original ideas,and thus provide a deeper understanding. But only those basic definitions that are necessary and sufficient will be presented;students interested in delving deeper into set theory and logic,can for example read the book by Stoll (1979[10]);it provides a precise and comprehensive treatment.2.1Fuzzy SetsAccording to Cantor a set X is a collection of definite,distinguishable objects of our intuition which can be treated as a whole.The objects are the members of X.The concept ’objects of our intuition’gives us great freedom of choice,even sets with infinitely many members.Objects must be’definite’:given an object and a set,it must be possible to determine whether the object is,or is not,a member of the set.Objects must also be’distinguishable’:given a set and its members,it must be possible to determine whether any two members are different,or the same.The members completely define a set.To determine membership,it is necessary that the sentence’x is a member of X’,where x is replaced by an object and X by the name of a set, is either true or false.We use the symbol∈and write x∈X if object x is a member of the set X.The assumption that the members determine a set is equivalent to saying:Two sets X and Y are equal,X=Y,iff(if and only if)they have the same members.The set whose members are the objects x1,x2,...,x n is written2{x1,x2,...,x n}.In particular,the set with no members is the empty set symbolized by∅.The set X is included in Y,X⊆Yiff each member of X is a member of Y.We also say that X is a subset of Y,and it means that,for all x,if x∈X,then x∈Y.The empty set is a subset of every set.Almost anything called a set in ordinary conversation is acceptable as a mathematical set,as the next example indicates.Example1Classical setsThe following are lists or collections of definite and distinguishable objects,and therefore sets in the mathematical sense.(a)The set of non-negative integers less than3.This is afinite set with three members {0,1,2}.(b)The set of live dinosaurs in the basement of the British Museum.This set has no members,it is the empty set∅.(c)The set of measurements greater than10volts.Even though this set is infinite,it is possible to determine whether a given measurement is a member or not.(d)The set{0,1,2}is the set from(a).Since{0,1,2}and{2,1,0}have the same mem-bers,they are equal sets.Moreover,{0,1,2}={0,1,1,2}for the same reason.(e)The members of a set may themselves be sets.The setX={{1,3},{2,4},{5,6}}is a set with three members,namely,{1,3},{2,4},and{5,6}.Matlab supports sets of sets, or nested sets,in cell arrays.The notation in Matlab for assigning the above sets to a cell array x is the same.(f)It is possible in Matlab to assign an empty set,for instance:x={[]}.Although the brace notation{·}is practical for listing sets of a few elements,it is impractical for large sets and impossible for infinite sets.How do we then define a set with a large number of members?An answer requires a few more concepts.A proposition is an assertion(declarative statement)which can be classified as either true or false.By a predicate in x we understand an assertion formed using a formula in x.For instance,’0<x≤3’,or’x>10volts’are predicates.They are not propositions,however,since they are not necessarily true or false.Only if we assign a value to the variable x,each predicate becomes a proposition.A predicate P(x)in x defines a set X by the convention that the members of X are exactly those objects a such that P(a)is true.In mathematical notation:{x|P(x)},read’the set of all x such that P(x).’Thus a∈{x|P(x)}iff P(a)is a true proposition.A system in which propositions must be either true or false,but not both,uses atwo-valued logic.As a consequence,what is not true is false and vice versa;that is the law of the excluded middle.This is only an approximation to human reasoning,as Zadeh observed:3Clearly,the"class of all real numbers which are much greater than1,"or"the class of beautiful women,"or"the class of tall men,"do not constitute classes or sets in the usual mathematical sense of these terms.(Zadeh,1965[12])Zadeh’s challenge we might call it,because for instance’tall’is an elastic property.To define the set of tall men as a classical set,one would use a predicate P(x),for instancex≥176,where x is the height of a person,and the right hand side of the inequality a threshold value in centimeters(176centimeters'5foot9inches).This is an abrupt approximation to the concept’tall’.From an engineering viewpoint,it is likely that the measurement is uncertain,due to a source of noise in the equipment.Thus,measurements within the narrow band176±ε,whereεexpresses variation in the noise,could fall on either side of the threshold randomly.Following Zadeh a membership grade allowsfiner detail,such that the transition from membership to non-membership is gradual rather than abrupt.The membership grade for all members defines a fuzzy set(Fig.1).Given a collection of objects U,a fuzzy set A in U is defined as a set of ordered pairsA≡{h x,μA(x)i|x∈U}(1) whereμA(x)is called the membership function for the set of all objects x in U—for the symbol’≡’read’defined as’.The membership function relates to each x a membership gradeμA(x),a real number in the closed interval[0,1].Notice it is now necessary to work with pairs h x,μA(x)i whereas for classical sets a list of objects suffices,since their membership is understood.An ordered pair h x,y i is a list of two objects,in which the object x is consideredfirst and y second(note:in the set{x,y}the order is insignificant).The term’fuzzy’(indistinct)suggests an image of a boundary zone,rather than an abrupt frontier.Indeed,fuzzy logicians speak of classical sets being crisp sets,to distinguish them from fuzzy sets.As with crisp sets,we are only guided by intuition in deciding which objects are members and which are not;a formal basis for how to determine the membership grade of a fuzzy set is absent.The membership grade is a precise,but arbitrary measure:it rests on personal opinion,not reason.The definition of a fuzzy set extends the definition of a classical set,because membership valuesμare permitted in the interval0≤μ≤1,and the higher the value,the higher the membership.A classical set is consequently a special case of a fuzzy set,with membership values restricted toμ∈{0,1}.A single pair h x,μ(x)i is a fuzzy singleton;thus the whole set can be viewed as the union of its constituent singletons.Example2Fuzzy setsThe following are sets which could be described by fuzzy membership functions.(a)The set of real numbers xÀ1(x much greater than one).(b)The set of high temperatures,the set of strong winds,or the set of nice days are fuzzy sets in weather reports.(c)The set of young people.A one year old baby will clearly be a member of the set of young people,and a100-year-old person will not be a member of this set.A person aged304Figure1.Two definitions of the set of"tall men",a crisp set and a fuzzy set.(figtall.m) might be young to the degree0.5.(d)The set of adults.The Danish railways allow children under the age of15to travel at half price.An adult is thus defined by the set of passengers aged15or older.By their definition the set of adults is a crisp set.(e)A predicate may be crisp,but perceived as fuzzy:a speed limit of60kilometres per hour is by some drivers taken to be an elastic range of more or less acceptable speeds within, say,60−70kilometres per hour('37−44miles per hour).Notice how,on the one hand, the traffic law is crisp while,on the other hand,those drivers’s understanding of the law is fuzzy.Members of a fuzzy set are taken from a universe of discourse,or universe for short.The universe is all objects that can come into consideration,confer the set U in(1).The universe depends on the context,as the next example shows.Example3Universes(a)The set xÀ1could have as a universe all real numbers,alternatively all positive integers.(b)The set of young people could have all human beings in the world as its universe. Alternatively it could have the numbers between0and100;these would then represent age in years.(c)The universe depends on the measuring unit;a duration in time depends on whether it is measured in hours,days,or weeks.(d)A non-numerical quantity,for instance taste,must be defined on a psychological continuum;an example of such a universe is U={bitter,sweet,sour,salt,hot}.A programmer can exploit the universe to suppress faulty measurement data,for instance negative values for a duration of time,by making the program consult the universe.5Figure 2.Around noon.Four possible membership functions representing the time ’around noon’:a)trapeziodal,b)triangular,c)smooth trapezoid,and d)smooth triangular.The universe is the hours of the day in 24-hour format.(figmf0.m)There are two alternative ways to represent a membership function:continuous ordiscrete.A continuous fuzzy set A is de fined by means of a continuous membership function μA (x ).A trapezoidal membership function is a piecewise linear,continuous function,controlled by four parameters {a,b,c,d }(Jang et al.,1997[4])μtrapezoid (x ;a,b,c,d )=⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩0,x ≤a x −a ,a ≤x ≤b 1,b ≤x ≤c d −x d −c ,c ≤x ≤d 0,d ≤x⎫⎪⎪⎪⎪⎬⎪⎪⎪⎪⎭,x ∈R (2)The parameters a ≤b ≤c ≤d de fine four breakpoints,here designated:left footpoint (a ),left shoulderpoint (b ),right shoulderpoint (c ),and right footpoint (d ).Figure 2(a)illustrates a trapezoidal membership function.A triangular membership function is piecewise linear,and derived from the trapezoidal membership function by merging the two shoulderpoints into one,that is,setting b =c,Fig.2(b).Smooth,differentiable versions of the trapezoidal and triangular membership functions can be obtained by replacing the linear segments corresponding to the intervals a ≤x ≤b6and c ≤x ≤d by a nonlinear function,for instance a half period of a cosine function,μST rapezoid (x ;a,b,c,d )=⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩0,x ≤a 1+1cos(x −b π),a ≤x ≤b 1,b ≤x ≤c 12+12cos(x −c d −c π),c ≤x ≤d 0,d ≤x⎫⎪⎪⎪⎪⎬⎪⎪⎪⎪⎭,x ∈R We call it here STrapezoid for ’smooth trapezoid ’or ’soft trapezoid ’.Figures 2(c-d)illustrate the smooth membership functions.Other possibilities exist for generating smooth trapezoidal functions,for example Gaussian,generalized bell,and sigmoidal membership functions (Jang et al.,1997[4]).Discrete fuzzy sets are de fined by means of a discrete variable x i (i =1,2,...).A discrete fuzzy set A is de fined by ordered pairs,A ={h x 1,μ(x 1)i ,h x 2,μ(x 2)i ,...|x i ∈U ,i =1,2,...}Each membership value μ(x i )is an evaluation of the membership function μat a discrete point x i in the universe U ,and the whole set is a collection,usually finite,of pairs h x i ,μ(x i )i .Example 4Discrete membership functionTo achieve a discrete triangular membership function from the trapezoid (2)assume the uni-verse is a vector u of 7elements.In Matlab notation,u=[9101112131415]Assume the de fining parameters are a =10,b =12,c =12,and d =14then,by (2),the corresponding membership values are a vector of 7elements,000.510.500Each membership value corresponds to one element of the universe,more clearly displayed aswith the universe in the top row.When this is impractical,in a program,the universe and the membership values can be kept in separate vectors.As a crude rule of thumb,the continuous form is more computing intensive,but less storage demanding than the discrete form.Zadeh writes that a fuzzy set induces a possibility distribution on the universe,meaning,one can interpret the membership values as possibilities.How are then possibilities related to probabilities?First of all,probabilities must add up to one,or the area under a density curve must be one.Memberships may add up to anything (discrete case),or the area under the membership function may be anything (continuous case).Secondly,a probability distribution concerns the likelihood of an event to occur,based on observations,whereas7a possibility distribution(membership function)is subjective.The word’probably’is synonymous with presumably,assumably,doubtless,likely,presumptively.The word’possible’is synonymous with doable,feasible,practicable,viable,workable.Their relationship is best described in the sentence:what is probable is always possible,but not vice versa.This is illustrated next.Example5Probability versus possibilitya)Consider the statement’Hans ate x eggs for breakfast’,where x∈U=h1,2,...,8i(Zadeh in Zimmermann,1993[16]).We may associate a probability distribution p by observing Hans eating breakfast for100days,A fuzzy set expressing the grade of ease with which Hans can eat x eggs may be the following possibility distributionπ,Where the possibilityπ(3)=1,the probability p(3)=0.1only.b)Consider a universe of four car modelsU={T rabant,F iat Uno,BMW,F errari}.We may associate a probability p(x)of each car model driving100miles per hour(161 kilometres per hour)on a motorway,by observing cars for100days,p(T rabant)=0,p(F iat Uno)=0.1,p(BMW)=0.4,p(F errari)=0.5The possibilities may beπ(T rabant)=0,π(F iat Uno)=0.5,π(BMW)=1,π(F errari)=1 Notice that each possibility is at least as high as the corresponding probability.Equality and inclusion are defined by means of membership functions.Two fuzzy sets A and B are equal,iff they have the same membership function,A=B≡μA(x)=μB(x)(3) for all x.A fuzzy set A is a subset of(included in)a fuzzy set B,iff the membership of A is less than equal to that of B,A⊆B≡μA(x)≤μB(x)(4) for all x.2.2Fuzzy Set OperationsIn order to generate new sets from existing sets we define two operations,in certain respects analogous to addition and multiplication.The(classical)union of the sets X and Y, symbolized by X∪Y and read’X union Y’,is the set of all objects which are members of8Figure3.Set operations.The top row are classical Venn diagrams;the universe is repre-sented by the points within the rectangle,and sets by the interior of the circles.The bottom row their fuzzy equivalents;the universal set is represented by a horisontal line at member-shipμ=1,and sets by membership functions.The shaded areas are:a)and d)union A∪B, b)and e)intersection A∩B,and c)and f)complement A∪B.(figvenn2.m)X or Y,or both.That is,X∪Y≡{x|x∈X or x∈Y}Thus,by definition,x∈X∪Y iff x is a member of at least one of X and Y.For example,{1,2,3}∪{1,3,4}={1,2,3,4}The(classical)intersection of the sets X and Y,symbolized by X∩Y and read’X intersection Y’,is the set of all objects which are members of both X and Y.That is,X∩Y≡{x|x∈X and y∈Y}For example,{1,2,3}∩{1,3,4}={1,3}The(classical)complement of a set X,symbolized by X and read’the complement of X’isX≡{x|x/∈X}That is,the set of those members of the universe which are not members(/∈)of X.Venn diagrams clearly illustrate the set operations,Fig.3(a-c).When turning to fuzzy sets,the gradual membership complicates matters.Figure3(d-f)9shows an intuitively acceptable modification of the Venn diagrams.The following fuzzy set operations are defined accordingly:Let A and B be fuzzy sets defined on a mutual universe U.The fuzzy union of A and B isA∪B≡{h x,μA∪B(x)i|x∈U andμA∪B(x)=max(μA(x),μB(x))}The fuzzy intersection of A and B isA∩B≡{h x,μA∩B(x)i|x∈U andμA∩B(x)=min(μA(x),μB(x))}The fuzzy complement of A isA≡{h x,μ(x)i|x∈U andμ(x)=1−μA(x)}While the notation may look cumbersome,it is in practice easy to apply the fuzzy set operations max,min,and1−μ.Example6Buying a house(after Zimmermann,1993[16])A four-person family wishes to buy a house.An indication of their level of comfort is the number of bedrooms in the house.But they also wish a large house.The universe U= h1,2,3,4,5,6,7,8,9,10i is the set of houses to be considered described by their number of bedrooms.The fuzzy set Comfortable may be described as a vector c,or in Matlabc=£0.20.50.810.70.30000¤Let l describe the fuzzy set Large,defined asl=£000.20.40.60.81111¤The intersection of Comfortable and Large is then min(c,l),000.20.40.60.30000To interpret,five bedrooms is optimal having the largest membership value0.6.It is,however, not fully satisfactory,since the membership is less than1.The second best solution is four bedrooms,membership0.4.If the market is a buyer’s market,the family will probably wait until a better offer comes up,thus hoping to achieve full satisfaction(membership1).The union of Comfortable and Large is max(c,l)0.20.50.810.70.81111Here four bedrooms is fully satisfactory(membership1)because it is comfortable.Also7-10 bedrooms are satisfactory,because the house is large.If the market is a seller’s market,the family might buy the house,being content that at least one of the criteria is fulfilled.If the children are about to move away from the family within the next couple of years,the parents may wish to buy a house that is Comfortable and Not Large,or min(c,1-l)0.20.50.80.60.40.20000In that case,three bedrooms is satisfactory to the degree0.8.The example indicates how fuzzy sets can be used for computer aided decision support.In mathematics the word’relation’is used in the sense of relationship,for example the10predicates:x is less than y,or y is a function of x.A binary relation R is a set of ordered pairs.We may write it x R y which reads:’x is related to y.’There are established symbols for various relations,for example x=y,x<y.One simple relation is the set of all pairs h x,y i,such that x is a member of a set X and y is a member of a set Y.This is the(classical) cartesian product of X and Y,X×Y={h x,y i|x∈X,y∈Y}In fact,any binary relation x R y is a subset of the cartesian product X×Y,and we can think of those instances of X×Y,that are members of R as having membership1.By analogy,a binary fuzzy relation consists of pairs h x,y i with an associated fuzzy membership value.For example,given X=Y={1,2,3}we can set up a relation’approximately equal’between all pairs of the three numbers,most clearly displayed in a tabular arrangement,Y1X23In the fuzzy cartesian product each pair:the object,which is a pair itself,and its membership.Let A and B be fuzzy sets defined on X and Y respectively,then the cartesian product A×B is a fuzzy set in X×Y with the membership functionA×B=©h x,y i,μA×B(x,y)®|x∈X,y∈Y,μA×B(x,y)=min(μA(x),μB(y))ªFor example,assume X and Y are as above,andμA(x i)=h0,0.5,1i,with i=1,2,3,and μB(y j)=h1,0.5,0i,with j=1,2,3,then A×B is a two-dimensional fuzzy setBA0.51The element at row i and column j is the intersection ofμA(x i)andμB(y j).Again we note that to each object h x i,y j i is associated a membershipμA×B(x i,y j),whereas the classical cartesian product consists of objects h x i,y j i only.In order to see how to combine relations,let us look at an example from the cartoon Donald Duck.Example7Donald Duck’s familyAssume that Donald Duck’s nephew Huey resembles nephew Dewey to the grade0.8,and Huey resembles nephew Louie to the grade0.9.We have therefore a relation between two subsets of the nephews in the family.This is conveniently represented in a matrix,with one row and two columns(and additional headings),R1=Huey11Let us assume another relation between nephews Dewey and Louie on the one side,and uncle Donald on the other,a matrix with two rows and one column,R2=DeweyLouieWe wish tofind out how much Huey resembles Donald by combining the information in the two matrices.Observe that(i)Huey resembles Dewey(R1(1,1)=0.8),and Dewey in turn resembles Donald(R2(1,1)=0.5),or(ii)Huey resembles Louie(R1(1,2)=0.9),and Louie in turn resembles Donald(R2(2,1)= 0.6).Assertion(i)contains two relationships combined by’and’;it seems reasonable to takethe intersection.With our definition,this corresponds to choosing the smallest membership value for the(transitive)Huey-Donald relationship,or min(0.8,0.5)=0.5.Similarly with statement(ii).Thus from chains(i)and(ii),respectively,we deduce that(iii)Huey resembles Donald to the degree0.5,or(iv)Huey resembles Donald to the degree0.6.Although the results in(iii)and(iv)differ,we are equally confident in either result;we haveto choose either one or the other,so it seems reasonable to take the union.With our definition, this corresponds to choosing the largest membership value,or max(0.5,0.6)=0.6.Thus,the answer is that Huey resembles Donald to the degree0.6.Generally speaking,this was an example of composition of relations.Let R and S betwo fuzzy relations defined on X×Y and Y×Z respectively.Their composition is a fuzzyset defined byR◦S=(*h x,z i,[yμR(x,y)∩μS(y,z)+|x∈X,y∈Y,z∈Z)When R and S are expressed as matrices R and S,the composition is equivalent to aninner product.The inner product is similar to an ordinary matrix(dot)product,except multiplication is replaced by any function and summation by any function.Suppose R isan m×p matrix and S is a p×n matrix.Then the inner∪−∩product(read’cup-cap product’)is an m×n matrix T=(t ij)whose ij-entry is obtained by combining the i throw of R with the j th column of S,such thatt ij=(r i1∩s1j)∪(r i2∩s2j)∪...∪(r ip∩s pj)=p[k=1r ik∩s kj(5)With our definitions of the set operations,the composition is specifically called max-min composition(Zadeh in Zimmermann,1993[16]).Sometimes the min operation is replaced by*for multiplication,then it is called max-star composition.Example8Inner product12For the tables R1and R2above,the inner product yields,R1◦R2==(0.8∩0.5)∪(0.9∩0.6)=0.5∪0.6=0.6 which agrees with the previous result.3Fuzzy LogicLogic started as the study of language in arguments and persuasion,and it can be used to judge the correctness of a chain of reasoning—in a mathematical proof for instance. The goal of the theory is to reduce principles of reasoning to a code.The’truth’or’falsity’assigned to a proposition is its truth-value.In fuzzy logic a proposition may be true or false,or an intermediate truth-value such as maybe true.The sentence’John is a tall man’is an example of a fuzzy proposition.For convenience we shall here restrict the possible truth-values to a discrete domain{0,0.5,1}for false,maybe true,and true.In doing so we are in effect restricting the theory to multi-valued logic,or rather three-valued logic to be specific.In practice one would subdivide the unit interval intofiner divisions,or work with a continous truth-domain.Nevertheless,much of what follows is valid even in a continuous domain as we shall see.3.1PropositionsIn daily conversation and mathematics,sentences are connected with the words and,or,if-then(or implies),and if and only if.These are called connectives.A sentence which is modified by the word’not’is called the negation of the original sentence.The word’and’is used to join two sentences to form the conjunction of the two sentences.The word’or’is used to join two sentences to form the disjunction of the two sentences.From two sentences we may construct one,of the form’If...then...’;this is called an implication.The sentence following’If’is the antecedent,and the sentence following’then’is the consequent.Other idioms which we shall regard as having the same meaning are’p implies q’,’p only if q’,’q if p’,etc.Letters and special symbols make the connective structure stand out.Our choice of symbols is¬for’not’∧for’and’∨for’or’⇒for’if-then’(implication)⇔for’if and only if’(equivalence)The next example illustrates how the symbolic forms expose the underlying logical structure. Example9Baseball betting(Stoll,1979[10])13Consider the assertion about four baseball teams:If either the Pirates or the Cubs loose and the Giants win,then the Dodgers will be out of first place,and I will loose a bet.Since it is an implication,it may be symbolised in the form r ⇒s.The antecedent is composed from the three sentences p (The Pirates lose),c (The Cubs lose),and g (The Giants win).The consequent is the conjunction of d (The Dodgers will be out of first place)and b (I will lose a bet).The original sentence may thus be represented by ((p ∨c )∧g )⇒(d ∧b ).An assertion which contains at least one propositional variable is called a propositional form .The main difference between proposition and propositional form is that everyproposition has a truth-value,whereas a propositional form is an assertion whose truth-value cannot be determined until propositions are substituted for its propositional variables.But when no confusion results,we will refer to propositional forms as propositions.A truth-table summarises the possible truth-values of an assertion.Take for example the truth-table for the two-valued propositional form p ∨q .The truth-table (below,left)lists all possible combinations of truth-values —the Cartesian product —of the arguments p and q in the two leftmost columns.The rightmost column holds the truth-values of the proposition.Alternatively,the truth-table can be rearranged into a two-dimensional array,a so-called Cayley table (below,right).is equivalent to Or p ∨q →q 01↓p Along the vertical axis in the Cayley table,symbolized by arrow ↓,are the possible values 0and 1of the first argument p .Along the horizontal axis,symbolized by arrow →,are the possible values 0and 1of the second argument q .Above the table,the proposition p ∨q reminds us that the table concerns disjunction.At the intersection of row i and column j (only counting the inside of the box)is the truth-value of the expression p i ∨q j .By inspection,one entry renders p ∨q false,while three entries render p ∨q true.Truth-tables for binary connectives are thus given by two-by-two matrices.A total of 16such tables can be constructed,and each has been associated with a connective.We can derive the truth-table for ’nand’(’not and’)from ’or’.By the de finition (¬p )∨(¬q )we negate each variable of the previous truth-table,which is equivalent to reversing the axes and permuting the entries back in the usual ascending order on the axes,Nand(¬p )∨(¬q )→q01↓p14。
北京师范大学模糊系统与人工智能方向简介
北京师范大学模糊系统与人工智能方向简介北京师范大学模糊数学与人工智能方向是国内最早从事模糊数学及其应用研究的单位之一,能够说是国内模糊数学研究的重要基地。
早在1979年北师大数学科学学院开始就开始招收模糊数学研究方向的硕士研究生,是我国最早从事模糊数学研究的硕士学科点。
1986年,汪培庄先生牵头,以模糊数学为主申请下来应用数学博士点,这也是我国最早从事模糊数学研究的博士学科点。
迄今为止,北师大数学科学学院已培养几十名硕士和博士研究生,同时在各种工作岗位已成为骨干力量。
北京师范大学模糊系统与模糊信息研究中心暨复杂系统实时智能操纵实验室创建于2000年。
现任中心主任为国家级有突出奉献中青年专家李洪兴教授。
目前,实验室拥有博导教授2人,副教授3人,博士后2人,在读博士生15人〔其中具有教授职称者2人,副教授4人〕,硕士研究生19人。
该研究中心现有一个应用数学的博士学位授权点,应用数学和操纵理论与操纵工程两个硕士学位授权点。
1982年至今,北京师范大学模糊数学与人工智能研究群体先后提出并研究了因素空间、真值流推理、随机集落影、模糊运算机、模糊摄动理论、幂结构提升理论、基于变权综合的智能信息处理、模糊系统的插值表示、变论域智能运算、复杂系统建模以及知识表示的数学理论模糊运算机等一些先进的理论方法。
近期的要紧研究成果包括:1〕给出因素空间理论,建立知识表示的数学框架,并系统研究概念的内涵与外延表示问题,为专家体会、领域知识在软件系统中的表示与运算提供了理论基础;2〕揭示了模糊逻辑系统的数学本质,给出常用模糊逻辑系统地插值表示,并系统研究了模糊逻辑系统的构造、分析以及泛靠近性等理论问题;3〕提出变论域自适应智能信息处理理论,设计了基于变论域思想的一类高精度模糊操纵器,在世界上第一个实现了四级倒立摆操纵实物系统,经教育部组织专家鉴定,确认这是一项原创性的具有国际领先水平的重大科研成果;4〕引入变权的概念,并给出基于自适应变权理论的智能信息处理方法;5〕提出模糊运算机的概念,并研究了模糊运算机设计的假设干理论问题;6〕给出数学神经网络理论,从数学上揭示了模糊逻辑系统与人工神经网络之间的关系,首次定义了〝输出返回〞的模糊逻辑系统并证明了它与反馈式神经网络等价;7〕提出一种基于数据集成、规那么提取和模糊推理的复杂系统的建模方法,即基于模糊推理的建模方法,由此可突破障碍模糊操纵理论进展的一些瓶颈问题,诸如稳固性、能控性、能观测性等的判据问题。
Fuzzy Systems and Control
Fuzzy Systems and Control Fuzzy systems and control are essential components of modern engineering and technology, playing a crucial role in various applications such as robotics, automation, and decision-making processes. These systems are designed to handle uncertainty and imprecision, mimicking human-like reasoning to make intelligent decisions in complex and ambiguous environments. One of the key advantages of fuzzy systems is their ability to model and control nonlinear and complex systems effectively. Traditional control systems often struggle with nonlinearities and uncertainties, leading to suboptimal performance or instability. Fuzzy logic, on the other hand, can handle these challenges by using linguistic variables and fuzzy rules to capture the underlying dynamics of the system. Moreover, fuzzy systems offer a more intuitive and human-friendly approach to control anddecision-making. Instead of relying on precise mathematical models and equations, fuzzy logic allows engineers to express their knowledge and expertise in the form of linguistic rules. This not only simplifies the design process but also makes the system more interpretable and transparent to users. In addition to their flexibility and interpretability, fuzzy systems are also robust and adaptive. They can easily accommodate changes in the system dynamics or operating conditions without the need for extensive re-tuning or redesign. This adaptability is particularly valuable in real-world applications where the environment is constantly changing, and precise modeling is challenging. Furthermore, fuzzy systems are well-suited for handling imprecise and incomplete information, which is common in many real-world scenarios. By using fuzzy sets and fuzzy rules, these systems can effectively deal with vague and uncertain inputs, making them suitable for decision-making in uncertain and dynamic environments. This ability to handle uncertainty is a significant advantage of fuzzy systems over traditional control methods. Overall, fuzzy systems and control offer a powerful and versatile approach to modeling and controlling complex systems. Their ability to handle nonlinearities, uncertainties, and imprecise information makes them well-suitedfor a wide range of applications in engineering, robotics, and artificial intelligence. By combining human-like reasoning with computational efficiency,fuzzy systems provide a unique and effective solution to challenging control problems.。
模糊系统理论1
0 引 论
模糊性是人类思维和客观事 物普遍具有的属性之一
★ 世界模糊性 ★ 思维模糊性
0.1 模糊的普遍性
一方面,在客观事物之间存在着中间过渡,存在着
“亦此亦彼”现象即模糊现象。
另一方面,尽管事物的表现或内在属性有其确定性,
但是由于观测手段和科研水平所限,在科学发展的 一定阶段上,人们对这些属性的认识带有模糊性。
日本与欧美的模糊技术热
1 2 3 4 从八十年代起开展了模糊控制的研究与开发 九十年代日本兴起模糊控制技术是高新技术领域的一次革命 模糊产品给日本带来巨额利润 日本模糊技术21世纪的长远规划(6个重点课题) 1)基础研究 2)模糊电脑:实现F信息的电脑处理,电脑的构造、逻辑记忆 3)机器智能:使机器能高速地识别和判断模糊信息 4)人机系统:F数据库、F专家系统和自然语言处理技术 5)人与社会系统:进行复杂的人类行为分析,包括决策支持 系统、医疗诊断系统、行为心理透视系统及社会经济模型 6)自然系统:研究和模拟自然现象,如辨别物理变化和化学 变化、判断大气污染状况,地震预测等
模糊与精确的关系
模糊性与精确性: 对立统一,相互依存,可互相转化。 - 精确的概念可表达模糊的意思: 如“望庐山瀑布” “飞流直下三千尺,凝是银河落九天” - Fuzzy的概念也能表达精确的意思: 模糊数学不是让数学变成模模糊糊的东西, 而是让数学进入模糊现象这个禁区,即用 精确的数学方法去研究处理模糊现象
杂志 IFSA会刊《Fuzzy Sets and Systems》;
IEEE会刊《Fuzzy Systems》;
台湾的《International Journal Of Fuzzy Systems》; 中国的《模糊系统与数学》。 会议 国际会议,IFSA的年会,每两年一次(中国北京2005年年会) 专题学术研讨会; 有关信息科学方面的国际会议都有“模糊系统”专题
英文 学术论文格式
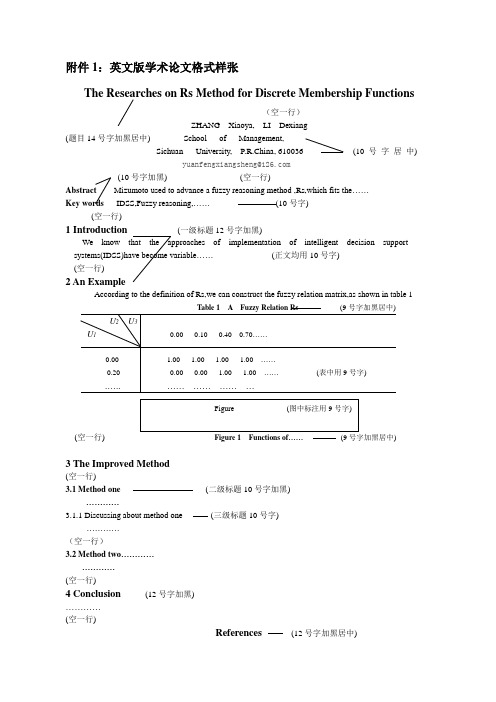
附件1:英文版学术论文格式样张The Researches on Rs Method for Discrete Membership Functions(空一行)ZHANG Xiaoya, LI Dexiang(题目14号字加黑居中) School of Management,Sichuan University, P.R.China, 610036 (10 号字居中)yuanfengxiangsheng@(10号字加黑) (空一行)Abstract Mizumoto used to advance a fuzzy reasoning method ,Rs,which fits the……Key words IDSS,Fuzzy reasoning,……(10号字)(空一行)1 Introduction (一级标题12号字加黑)We know that the approaches of implementation of intelligent decision support systems(IDSS)have become variable……(正文均用10号字)(空一行)2 An ExampleAccording to the definition of Rs,we can construct the fuzzy relation matrix,as shown in table 1Table 1 A Fuzzy Relation Rs (9号字加黑居中) U2U3U10.00 0.10 0.40 0.70……0.00 1.00 1.00 1.00 1.00 ……0.20 0.00 0.00 1.00 1.00 ……(表中用9号字).….. …………………(空一行)Figure 1 Functions of……(9号字加黑居中)3 The Improved Method(空一行)3.1 Method one (二级标题10号字加黑)…………3.1.1 Discussing about method one (三级标题10号字)…………(空一行)3.2 Method two……………………(空一行)4 Conclusion (12号字加黑)…………(空一行)References (12号字加黑居中)(空一行)[1] M.Mizumoto,H.J.Zimmermann. comparision of fuzzy reasoning methods. Fuzzy Sets andSystems ,8(1982),p253~283 (参考文献均用10号字)国际会议论文排版要求及样张关于论文1.论文的书写顺序时:标题、作者姓名、作者单位,邮箱,摘要、关键词、引言、正文、结论、参考文献。
Fuzzy Logic

Fuzzy Systems and Control
Fuzzy Systems and Control Fuzzy systems and control play a crucial role in the field of artificial intelligence and decision-making processes. These systems are designed to handle uncertainty and imprecision, making them suitable for a wide range of applications such as pattern recognition, control systems, and decision-making processes. However, despite their potential, there are several challenges and limitations associated with fuzzy systems and control that need to be addressed. One of the main challenges of fuzzy systems and control is their complexity. Designing and implementing a fuzzy system requires a deep understanding of fuzzy logic, which can be quite challenging for engineers and researchers. Moreover, tuning the parameters of a fuzzy system to achieve optimal performance can be a time-consuming and labor-intensive process. This complexity can often deter practitioners from using fuzzy systems, opting for more traditional approaches instead. Another issue with fuzzy systems and control is their interpretability. While fuzzy systems are known for their ability to handle vague and imprecise information, the output of a fuzzy system can sometimes be difficult to interpret. This lack of interpretability can be a significant drawback, especially in safety-critical applications where clear and understandable decision-making processes are essential. Furthermore, the integration of fuzzy systems with traditional control systems can be a challenging task. Fuzzy control systems are often used to handle nonlinear and complex processes, but integrating them with existing control systems can be a daunting task. This integration requires a deep understanding of both fuzzy logic and traditional control theory, making it a complex and time-consuming process. Despite these challenges, fuzzy systems and control offer several advantages over traditional approaches. One of the main advantages istheir ability to handle uncertainty and imprecision. Traditional control systems often struggle with uncertain and imprecise information, whereas fuzzy systems excel in such environments. This makes fuzzy systems and control suitable for a wide range of real-world applications where uncertainty is prevalent. Additionally, fuzzy systems and control can offer improved performance in certain applications. For example, in complex and nonlinear systems, fuzzy control systems can outperform traditional control systems by providing more accurate and robustcontrol. This improved performance can lead to significant benefits in terms of efficiency, safety, and cost-effectiveness. In conclusion, while fuzzy systems and control pose several challenges and limitations, they also offer unique advantages and opportunities. By addressing the complexity, interpretability, and integration issues, researchers and practitioners can harness the full potential of fuzzy systems and control in a wide range of applications. With ongoing advancements in the field of artificial intelligence and control systems, the future of fuzzy systems and control looks promising, with the potential to revolutionize decision-making processes and control systems in various industries.。
Fuzzy Systems and Control
Fuzzy Systems and Control Fuzzy systems and control are essential components of modern engineering and technology, playing a crucial role in various applications such as industrial automation, robotics, and decision-making systems. However, despite their significance, these systems also present a myriad of challenges and complexities that engineers and researchers must grapple with. One of the primary problems associated with fuzzy systems and control is the inherent ambiguity and uncertainty that they often entail. Unlike traditional binary logic, which operates in a clear-cut, deterministic manner, fuzzy logic deals with degrees of truth, allowing for a more nuanced and flexible approach to modeling complex systems. While this flexibility is undoubtedly advantageous, it also introduces a level of vagueness that can be difficult to navigate, particularly when designing control systems for safety-critical applications. Another pressing issue in the realm of fuzzy systems and control is the challenge of effectively modeling and representing human cognition and decision-making processes. Fuzzy logic, with its ability to capture and quantify linguistic variables and vague concepts, has been instrumental in mimicking human reasoning in artificial intelligence and expert systems. However, accurately emulating the intricacies of human thought and decision-making within a computational framework remains a formidable obstacle. Human cognition is inherently complex and often influenced by emotional, social, and cultural factors that defy precise quantification. As such, developing fuzzy systems and control algorithms that can truly replicate human-like decision-making in all its nuanced glory presents a significant hurdle for researchers in the field. Furthermore, the integration of fuzzy systems and control into real-world applications poses its own set of challenges, particularly in safety-critical domains such as autonomous vehicles and medical devices. Ensuring the reliability and robustness of fuzzy control systems in such contexts is of paramount importance, as any errors or malfunctions could have severe consequences. The inherent non-determinism of fuzzy logic, while advantageous in certain respects, also raises concerns about the predictability and stability of control systems, especially when operating in dynamic and uncertain environments. Balancing the benefits of fuzzy logic with the need for dependable and fail-safe control insafety-critical applications is a significant technical and ethical dilemma that engineers and regulators must address. In addition to technical challenges, there are also practical considerations that impact the widespread adoption and implementation of fuzzy systems and control. One such concern is the computational overhead associated with fuzzy logic-based algorithms, which can be prohibitive in resource-constrained environments. While advances in hardware technology have mitigated some of these concerns, optimizing fuzzy control systems for efficiency and scalability remains an ongoing area of research and development. Moreover, the lack of standardized methodologies and best practices for designing and implementing fuzzy systems and control solutions hinders their seamlessintegration into existing engineering workflows. Overcoming these practical barriers requires not only technical innovation but also collaboration across interdisciplinary domains to establish unified standards and guidelines for the deployment of fuzzy logic in real-world applications. Finally, the education and training of engineers and practitioners in the field of fuzzy systems and control present its own set of challenges. As a relatively niche area within the broader field of control theory and artificial intelligence, fuzzy logic and its applications may not receive adequate attention in traditional engineering curricula. This lack of exposure can create a knowledge gap and impede the adoption of fuzzy systems and control in industry. Addressing this challenge requires a concerted effort to incorporate fuzzy logic principles and techniques into educational programs, as well as providing opportunities for hands-on experience and practical application of fuzzy control in engineering projects. In conclusion, the field of fuzzy systems and control presents a rich tapestry of challenges that span technical, practical, and educational domains. Navigating the inherent ambiguity and uncertainty of fuzzy logic, emulating human cognition, ensuring safety and reliability in real-world applications, addressing computational and practical constraints, and promoting education and training are all critical aspects that demand attention and innovation. While these challenges may seem daunting, they also represent opportunities for growth and advancement in the field, driving researchers and practitioners to push the boundaries of what is possible with fuzzy systems and control. By confronting these challenges withcreativity, collaboration, and perseverance, the potential for harnessing the power of fuzzy logic to solve complex engineering problems remains within reach.。
Fuzzy Systems and Control

Fuzzy Systems and Control Fuzzy systems and control are an integral part of modern engineering and technology, playing a crucial role in various applications such as robotics, automation, and decision-making processes. However, despite their widespread use and effectiveness, there are certain challenges and issues associated with fuzzy systems and control that need to be addressed. One of the primary problems with fuzzy systems and control is the complexity of designing and implementing these systems. Unlike traditional control systems, which rely on precise mathematical models and algorithms, fuzzy systems operate on the principles of uncertainty and approximation. This can make it challenging for engineers and researchers to develop accurate and reliable fuzzy control systems, especially in complex and dynamic environments. Another issue with fuzzy systems and control is the lack of standardized design and implementation methodologies. Unlike conventional control systems, which have well-established design techniques and best practices, fuzzy systems often require a more heuristic and trial-and-error approach. This can lead to inconsistencies and inefficiencies in the design and performance of fuzzycontrol systems, making it difficult to compare and evaluate different approaches. Furthermore, the interpretability of fuzzy systems and control is a significant concern. While fuzzy logic allows for the representation of vague and imprecise information, it can also make it challenging to interpret and understand the decision-making process of fuzzy control systems. This lack of transparency can be a significant barrier to the widespread adoption of fuzzy systems in critical applications where decision-making processes need to be explainable and transparent. In addition to these technical challenges, there are also practical issues associated with the implementation of fuzzy systems and control. One of the most significant challenges is the limited availability of skilled professionals with expertise in fuzzy logic and control. This shortage of talent can make it difficult for organizations to adopt and leverage fuzzy systems effectively, limiting the potential benefits of this technology. Despite these challenges,it's essential to recognize the significant potential of fuzzy systems and control in addressing complex and uncertain real-world problems. Fuzzy logic and control offer a unique approach to modeling and decision-making that can effectivelyhandle the inherent uncertainty and imprecision present in many real-world systems. By addressing the challenges associated with fuzzy systems and control, such as complexity, interpretability, and standardization, we can unlock the fullpotential of this technology and drive innovation in various fields. In conclusion, while fuzzy systems and control present several challenges and issues, they also offer significant potential in addressing complex and uncertain real-world problems. By addressing the technical, practical, and interpretability challenges associated with fuzzy systems and control, we can leverage this technology to drive innovation and improve decision-making processes in various applications. It's essential for researchers, engineers, and organizations to work together to develop standardized methodologies, improve interpretability, andbuild a skilled workforce to fully realize the benefits of fuzzy systems and control.。
Fuzzy Systems and Control
Fuzzy Systems and Control Fuzzy Systems and Control Fuzzy systems and control are an important area of study in the field of engineering and technology. This essay will explore the key concepts and applications of fuzzy systems and control, as well as their significance in the modern world. To begin with, fuzzy systems are a type of artificial intelligence that deals with reasoning and decision-making in a vague and uncertain environment. Unlike traditional binary logic, which only deals with true or false values, fuzzy logic allows for the representation of imprecise information. This makes it particularly useful in applications where precise numerical values are difficult to obtain, such as in control systems forindustrial processes or in consumer electronics. One of the key advantages of fuzzy systems is their ability to model complex, nonlinear systems. Traditional control systems often struggle to accurately represent and control systems with nonlinear behavior, but fuzzy control systems excel in this area. This makes them particularly useful in applications such as automotive control, where the behavior of the system may change depending on factors such as road conditions or driver input. In addition to their applications in control systems, fuzzy systems also have a wide range of other applications. For example, they are used in image processing and pattern recognition, where they can be used to classify and analyze complex visual data. They are also used in consumer electronics, such as in washing machines and air conditioners, where they can be used to automatically adjust settings based on environmental conditions. In conclusion, fuzzy systems and control are a powerful and versatile tool in the field of engineering and technology. Their ability to model complex, nonlinear systems and their wide range of applications make them an important area of study for anyone interested in artificial intelligence and control systems. As technology continues to advance, it is likely that fuzzy systems and control will play an increasingly important role in a wide range of applications.。
Fuzzy Systems and Control

Fuzzy Systems and Control Fuzzy Systems and Control Fuzzy systems and control have become increasingly important in recent years due to their ability to handle complex, uncertain and non-linear systems. This essay will discuss the principles of fuzzy systems and control, their applications, advantages and disadvantages, and the future prospects of this technology. Firstly, fuzzy systems and control are based on the concept of fuzzy logic, which allows for the representation of imprecise and vague information. This is in contrast to traditional binary logic, which only deals with precise and crisp values. Fuzzy logic allows for the handling of uncertainty and ambiguity, making it suitable for a wide range of applications such as decision making, pattern recognition, and control systems. In terms of applications, fuzzy systems and control have been successfully implemented in various fields such as automotive, consumer electronics, robotics, and finance. For example, in the automotive industry, fuzzy logic is used in anti-lock braking systems to improve vehicle stability and control. In consumer electronics, fuzzy logic is used in washing machines to automatically adjust the wash cycle based on the load size and fabric type. These examples demonstrate the versatility and practicality of fuzzy systems and control in real-world scenarios. Despite its many advantages, fuzzy systems and control also have some limitations. One of the main challenges is the difficulty in designing and tuning fuzzy systems, as they often require expert knowledge and experience. Additionally, the computational complexity of fuzzy systems can be a barrier to their widespread adoption, especially in real-time applications where speed is crucial. However, ongoing research and development efforts are aimed at addressing these challenges and improving the performance of fuzzy systems and control. Looking ahead, the future prospects of fuzzy systems and control are promising. With the increasing complexity and uncertainty in modern systems, the demand for intelligent and adaptive control systems is growing. Fuzzy systems have the potential to meet these demands by providing flexible and robust solutions for a wide range of applications. Furthermore, advancements in artificial intelligence and machine learning are likely to further enhance the capabilities of fuzzy systems and control, opening up new possibilities for their use in areas such as autonomousvehicles, smart grids, and healthcare. In conclusion, fuzzy systems and control offer a powerful and flexible approach to handling complex and uncertain systems. Their applications span across various industries, and while they have limitations, ongoing research and development efforts are aimed at addressing these challenges. Looking ahead, the future prospects of fuzzy systems and control are promising, with the potential for further advancements and widespread adoption in diverse fields. Overall, the principles of fuzzy systems and control, their applications, advantages and disadvantages, and the future prospects of this technology demonstrate the importance and potential of this field in addressing thechallenges of modern complex systems.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract In this paper, we deÿne generalized concepts of cardinality of a fuzzy-valued function and obtained some properties of these new concepts. Also, we investigate examples for the calculation of two generalized cardinality of fuzzy-valued functions and compared with concepts of cardinality of a fuzzy set and a fuzzy-valued function. c 2001 Elsevier Science B.V. All rights reserved. Keywords: Fuzzy set; Fuzzy number; Fuzzy cardinality; Sigma count; Fuzzy-valued function; Fuzzy-valued cardinality; Fuzzy-valued sigma count
F; a(1)
x2
F; a(2)
··· ···
xn
F; a(n)
:
This notation will be made clear in Section 2. We will use the following concept of fuzzy number. Let R be the real numbers and let [0, 1] be the unit interval in R. Let F(R) denote the set of all fuzzy sets in R.
F; a(k ) ; c(k ) ; d(k )
∧
F; 1−a(k +1) ; 1−d(k +1) ; 1−c(k +1) F; 0 (x ) = 1;
where a(0) ¿a(1) ¿ · · · ¿a(n) are the ordered values of the ai ’s, a(0) = 1 and a(n+1) = 0, and F; 1 (x ) = 0 for all x ∈ R. Furthermore, we deÿne the operation ∧ by
Fuzzy Sets and Systems 118 (2001) 479–487
/locate/fss
ቤተ መጻሕፍቲ ባይዱ
Cardinality concepts for type-two fuzzy sets
Lee-Chae Jang ∗; 1 , Dan Ralescu
Department of Mathematical Sciences, University of Cincinnati, Cincinnati, Ohio 45221-0025, USA Received April 1998; received in revised form January 1999
480
L.-C. Jang, D. Ralescu / Fuzzy Sets and Systems 118 (2001) 479–487
Deÿnition 1.1. A fuzzy set A ∈ F(R) is called a fuzzy number, if and only if (1) A is normal, i.e. there exists x0 ∈ R such that A (x0 ) = 1. (2) A is convex, i.e. A ( x + (1 − )y)¿ min( A (x); A (y)) for all x; y ∈ R and ∈ [0; 1]. (3) For any ∈ (0; 1]; A = {x: A (x)¿ } is a closed interval and cl(A0 ) = cl({x: A (x)¿0}) is compact. Here, cl(A0 ) is the closure of A0 . It follows from the deÿnition above that A ∈ F(R) is a fuzzy number if and only if there exists a closed interval [r; s] such that x ∈ [r; s] = ∅; 1; L(x); x¡ r; A (x ) = R(x); x¿s where L(x) is a right continuous function and R(x) is a left continuous function (see [6]). 2. Cardinality and f-cardinality Let X = {x1 ; x2 ; : : : ; xn } be a ÿnite set, and let A be a fuzzy subset of X , represented by its membership function A : X → [0; 1]. We denote the -level set of A by L (A) = {x ∈ X | A (x)¿ } for 06 61. The complement A of A has membership function A = 1 − A . Ralescu [3] and Ralescu [2] discussed some properties of card A, the cardinality of fuzzy set A. This should be a fuzzy subset of {0; 1; : : : ; n}, with card A(k ) being interpreted as the possibility that A has exactly k elements (06k 6n). Also, Ralescu [2] investigated that card A was k to the extent to which exactly k elements of X belong to A while the other (n − k ) elements do not belong to A and obtained the following explicit formular for the fuzzy cardinality: card A(k ) =
(k )
∧ (1 −
(k +1) );
k = 0; 1; : : : ; n
where (1) ; (2) ; : : : ; (n) are the values of A (x1 ); : : : ; A (xn ) arranged in decreasing order of magnitude, and (0) = 1; (n+1) = 0. Now we will consider a new deÿnition of f-card F , the fuzzy-valued cardinality of a fuzzy set-valued function F : X → F(R) with the following membership functions F (xi ) (x)= F; ai (x) of each F (xi ), for i = 1; 2; : : : ; n; x ∈ [ri ; si ] = ∅; 1; Li (x); x¡ ri ; F; ai ; ci ; di (x ) = Ri (x); x¿si where ai (i = 1; 2; : : : ; n) are some real numbers, si = ((m − 1)=m)ai and ti = ((m + 1)=m)ai , the functions Li are straight lines through points (1; si ); (ci ; 0) and the functions Ri are straight lines through points (1; ti ); (di ; 0), for some numbers ci ; di and i = 1; 2; : : : ; n. We denote the set of such fuzzy numbers by F 0. Deÿnition 2.1. The f-cardinality of a fuzzy-valued function F is the fuzzy-valued function f-card F : {0; 1; : : : ; n} →F 0 (R) deÿned for every k by f-card F (k ) =
F; a; c; d
∧
F; b; e; f
=
F; a∧b; c∧e; d∧f :
L.-C. Jang, D. Ralescu / Fuzzy Sets and Systems 118 (2001) 479–487
481
Notes 2.2. (1) Let a1 = · · · = ar = 1 and ar +1 = · · · = an = 0 and let Li = Ri = 0, we deÿne the membership functions F; ai ; ai ; ai of xi by
1. Preliminaries A fuzzy set is deÿned by a function f : X → [0; 1], where X is an ordinary set. Zadeh [7], Ralescu [2], Ralescu [3], Wygralak [5], Dubois and Prade [1], Yager [6] investigated concepts of cardinality of a fuzzy set and obtained some properties of these new concepts. A statement such as “most students are smart” has a truth value between 0 and 1; such a statement is of the general form “Qx’s are A” where Q is a fuzzy quantiÿer and A is a fuzzy subset of a (ÿnite) universe of discourse X = {x1 ; x2 ; : : : ; xn }. An explicit formula for the truth-value of such a statement was given for the ÿrst time in [2]. In this paper, we consider a fuzzy-valued function F : X → F(R) instead of a fuzzy set A, that is, instead of a real-valued function on X . We denote such a fuzzy-valued function by F= x1