永磁无刷直流电机稳态特性的状态空间分析
第三章直流电机的稳态分析
第三章直流电机的稳态分析第三章直流电机的稳态分析直流电机是电机的主要类型之⼀。
直流电动机以其良好的启动性和调速性能著称,直流发电机供电质量较好,常常作为励磁电源。
与交流电机相⽐直流电机的结构较复杂,成本较⾼,可靠性较差,使它的应⽤受到限制。
近年来,与电⼒电⼦装置结合⽽具有直流电机性能的电机不断涌现,使直流电机有被取代的趋势。
尽管如此,直流电机仍有⼀定的理论意义和实⽤价值。
本章先介绍直流电机的⼯作原理和基本结构,接着说明电机的磁动势和磁场,导出电机的电动势和电磁转矩公式,并分析直流电动机的稳态运⾏性能。
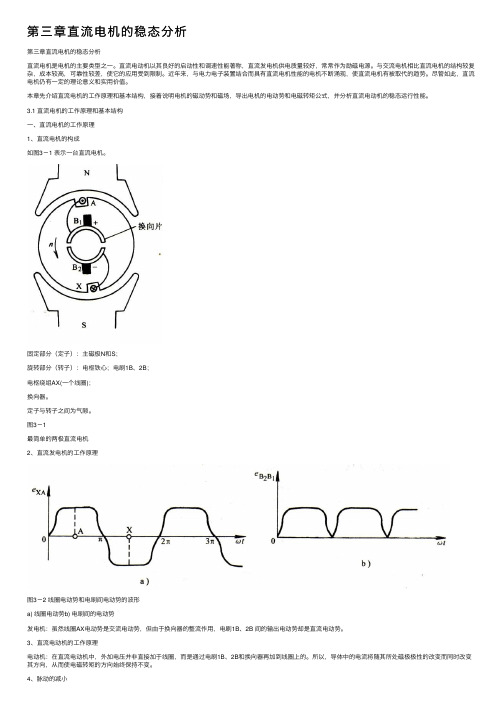
3.1 直流电机的⼯作原理和基本结构⼀、直流电机的⼯作原理1、直流电机的构成如图3-1 表⽰⼀台直流电机。
固定部分(定⼦):主磁极N和S;旋转部分(转⼦):电枢铁⼼;电刷1B、2B;电枢绕组AX(⼀个线圈);换向器。
定⼦与转⼦之间为⽓隙。
图3-1最简单的两极直流电机2、直流发电机的⼯作原理图3-2 线圈电动势和电刷间电动势的波形a) 线圈电动势b) 电刷间的电动势发电机:虽然线圈AX电动势是交流电动势,但由于换向器的整流作⽤,电刷1B、2B 间的输出电动势却是直流电动势。
3、直流电动机的⼯作原理电动机:在直流电动机中,外加电压并⾮直接加于线圈,⽽是通过电刷1B、2B和换向器再加到线圈上的。
所以,导体中的电流将随其所处磁极极性的改变⽽同时改变其⽅向,从⽽使电磁转矩的⽅向始终保持不变。
4、脉动的减⼩实现⽅法:电枢绕组由多个线圈串联⽽构成的,如图3-3所⽰。
电刷上的电动势如图3-4所⽰。
图3-3 电枢上装有6个线圈图3-4 每极下有3个串联线圈时的两极直流电机电刷上的电动势波形⼆、直流电机的基本结构旋转电机:定⼦,转⼦,⽓隙。
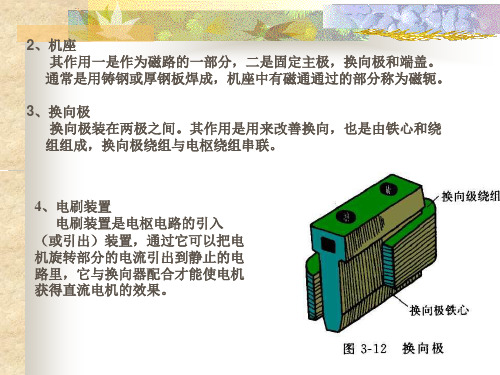
图3-6 国产直流电机的结构1、主磁极作⽤:建⽴主磁场。
构成:主极铁⼼和套装在铁⼼上的励磁绕组。
2、机座作⽤:1、主磁路的⼀部分;2、电机的结构框架。
构成:⽤厚钢板弯成筒形焊成或铸钢件制成。
永磁无刷直流电机及其控制

永磁无刷直流电机及其控制一、本文概述永磁无刷直流电机(Permanent Magnet Brushless DC Motor,简称BLDC)是一种结合了直流电机与无刷电机优点的先进电机技术。
本文将对永磁无刷直流电机及其控制技术进行详细的阐述和探讨。
我们将概述永磁无刷直流电机的基本原理和结构特点,包括其与传统直流电机的区别,以及为何在现代工业和家用电器等领域得到广泛应用。
接着,我们将深入探讨永磁无刷直流电机的控制策略,包括位置传感器控制、无位置传感器控制以及先进的电子控制技术,如微处理器和功率电子器件的应用。
我们还将分析永磁无刷直流电机的性能优化和故障诊断技术,以提高其运行效率和可靠性。
我们将展望永磁无刷直流电机及其控制技术的发展趋势,并探讨其在未来可持续能源和智能制造等领域的应用前景。
通过本文的阐述,读者可以对永磁无刷直流电机及其控制技术有更为全面和深入的理解。
二、永磁无刷直流电机的基本原理永磁无刷直流电机(Permanent Magnet Brushless DC Motor,简称BLDC)是一种结合了直流电机与无刷电机优点的电机类型。
其基本原理主要依赖于磁场与电流之间的相互作用,以及电子换向器的无刷换向技术。
磁场与电流相互作用:永磁无刷直流电机中,永磁体(通常是稀土永磁材料)被用来产生恒定的磁场。
当电流通过电机的电枢(也称为线圈或绕组)时,电枢会产生一个电磁场。
这个电磁场与永磁体的磁场相互作用,导致电机转子的旋转。
无刷换向技术:与传统的有刷直流电机不同,永磁无刷直流电机使用电子换向器代替了机械换向器。
电子换向器通过控制电流在电枢中的流动方向,实现了电机的无刷换向。
这种技术不仅提高了电机的效率,还降低了维护成本和噪音。
控制策略:为了精确控制电机的转速和方向,永磁无刷直流电机通常与电子速度控制器(ESC)一起使用。
电子速度控制器可以根据输入信号(如PWM信号)调整电枢中的电流大小和方向,从而实现对电机转速和方向的精确控制。
基于Ansoft的永磁无刷直流电机性能分析
基于Ansoft的永磁无刷直流电机性能分析永磁无刷直流电机(BLDC)具有体积小、起动转矩大、温升低、高功率等诸多优点。
在微电机领域,永磁无刷直流电机颇具潜力和优势,随着相关技术的不断发展其必将在小电机领域占据主导地位。
文章运用有限元软件Ansoft Maxwell,在Maxwell 2D环境下建立BLDC模型,对BLDC空載及负载时的磁场及电机性能进行了仿真分析。
其次,使用等效磁路软件RMxprt,利用参数变量分析法,完成了齿槽转矩的优化分析;同时,研究分析了定子槽型、导线直径、气隙长度、极弧系数对永磁无刷直流电机某些性能的影响,通过RMxprt仿真分析结果,可以为优化电机设计参数提供依据。
标签:永磁无刷直流电机;有限元分析;优化分析引言永磁无刷直流电机是一种新型电机,是电机技术、电力电子技术、微电子技术与控制理论相结合的一体化电机,具有结构简单、单位出力大、易于控制、较广的调速范围、效率高、损耗小等优点,被广泛应用于国防、航空航天、工农业、医疗设备和日常生活领域[1-3]。
对于永磁无刷直流电机性能的分析仿真已经成为了电机领域热点研究问题。
在永磁无刷直流电机的性能分析法中,常用的有状态方程仿真法、直流电机分析法、等效磁路法、电磁场有限元法等。
由于电磁场有限元分析法能够综合考虑铁磁材料的非线性及参数的变化,被广泛应用与电机分析。
文章采用Ansoft Maxwell对电机磁场分布和变化比较复杂的永磁无刷直流电机进行分析,同时运用RMxprt分析电机参数变化对电机性能的影响。
1 永磁无刷直流电机有限元分析模型文章所研究电机为内转子结构,所分析电机参数如表1所示[8-9]。
由于磁场随转子位置而时刻变化,采用部分场域分析的方法,边界条件较难确定,因此文章采用全场域分析的方法[5-6]。
为了建立永磁无刷直流电动机内部磁场的微分方程,确定求解区域和有限元求解的边界条件,作如下假设:(1)忽略电机端部磁场效应,磁场沿轴向均匀分布,矢量磁位A和电流密度J只有轴向分量Az和Jz,故磁感应强度只有Bx和By分量;(2)忽略转子铁心中的涡流、磁滞损耗;(3)磁场仅被限制于电机的内部,定子的外部边界及转子的内部边界认为是零矢量磁位线;(4)不计交变磁场在导电材料中如定子绕组及机座中的涡流反应。
永磁式无刷直流电动机调速性能分析与优化
© 1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
当忽略谐波电压对平均转矩的影响时 ,电动机的机械特性和效率特性如下 。
411 机械特性
①从图 5 的曲线 1 、曲线 2 和曲线 3 可以看出 ,机械特性是非直线的 ,转矩较大时 ,特变软 ,呈上翘形状 。在相同γ角的条件下 ,不同电压值的机械特性为
一组近于平行的曲线 。在相同电压条件下 ,随着γ角增大 ,特性的硬度降低 。机械特性硬度随着转
·CH·
Characteristic Analysis and Optimization for Permanent Magnet Brushless DC Motors
WEI Jing2cheng ZHANG Zu2yuan
Department of Electronic Information and Electrical Engineering
第 18 卷第 2 期 魏金成等 :永磁式无刷直流电动机调速性能分析与优化
37
式中 :
Im1 =
2 3
i
2 d1
+
i2q1
(7)
ψ
=
tg- 1 (
i d1 ) i q1
(8)
式中 :θ =
ωt 为 a 相绕组和磁极轴线的夹角 ;
P
=
d dt
为微分算子符号 ; Mf
为电枢绕阻和磁极同轴
永磁无刷直流电机控制系统设计

永磁无刷直流电机控制系统设计1.电机模型的建立:建立电机的数学模型是进行控制系统设计的第一步。
永磁无刷直流电机可以使用动态数学模型来描述其动态特性,常用的模型包括简化的转子动态模型和电动机状态空间模型。
简化的转子动态模型以电机的电磁转矩方程为基础,通过建立电机的电流-转速模型来描述电机的动态响应。
这个模型通常用于低频控制和电机启动阶段的设计。
电动机状态空间模型则是通过将电机的状态变量表示为电流和转速变量,用微分方程的形式描述电机的动态特性。
这个模型适用于高频控制和电机稳态响应分析。
2.控制器设计:经典的控制方法包括比例积分控制器(PI)和比例积分微分控制器(PID)。
比例积分控制器是最简单的控制器,通过调节电流的比例增益和积分时间来控制电机的速度。
这种控制器适用于低精度控制和对动态响应要求不高的应用。
比例积分微分控制器在比例积分控制器的基础上增加了微分项,通过调节微分时间来控制系统的阻尼比,提高系统的稳定性和动态响应。
3.参数调节:在控制器设计中,参数调节和整定是非常重要的环节,主要包括根据系统的要求选择合适的控制器参数,并进行优化。
参数调节可以通过试探法、经验法和优化算法等方法进行。
其中,试探法和经验法是相对简单的方法,通过调整控制器的参数值来达到稳定运行或者较好的控制性能。
优化算法可以通过数学模型和计算机仿真的方式进行,通过优化目标函数和约束条件,得到最合适的控制器参数。
总结起来,永磁无刷直流电机控制系统设计主要包括电机模型的建立、控制器设计和参数调节。
在设计过程中,需要根据系统的要求选择合适的控制器,通过参数调节和优化算法来提高系统的稳定性和动态性能。
永磁无刷直流电机的设计与电磁分析

本次演示采用有限元模拟和优化设计等方法对永磁无刷直流电机进行设计和 电磁分析。最后,对永磁无刷直流电机的电磁性能进行分析和讨论,包括磁场分 布、功率损耗、效率等,并指出了研究的不足和未来研究方向。
引言:
永磁无刷直流电机是一种具有高效率、低噪音、长寿命等优点的电机,在工 业自动化、电动汽车、航空航天等领域得到了广泛应用。随着技术的不断发展, 对永磁无刷直流电机的性能要求也不断提高。因此,本次演示旨在通过对永磁无 刷直流电机的设计与电磁分析,提高其性能指标,以满足不同领域的应用需求。
参考内容
基本内容
盘式永磁无刷直流电机是一种先进的电动设备,具有高效率、低噪音、长寿 命等优点。本次演示将详细介绍盘式永磁无刷直流电机的电磁设计过程,包括磁 场分布、线圈绕制、绝缘设计、冷却系统等,旨在为优化电机性能提供理论支持 和实践指导。
盘式永磁无刷直流电机是一种结合了永磁电机和无刷直流电机的优点的新型 电动设备。它采用永磁体作为磁源,可直接产生恒定的磁场,避免了传统有刷直 流电机需要定期更换电刷的缺点。盘式结构使得电机散热性能好、机械强度高, 能够在恶劣环境中稳定运行。
电磁设计是盘式永磁无刷直流电机设计的核心环节。磁场分布是电磁设计的 首要环节,合理的磁场分布可以提高电机性能、降低谐波损耗。线圈绕制方法对 电机的功率密度、电气性能和机械特性有着重要影响。在电磁设计中,需要综合 考虑线圈材料、线径、匝数等因素,以实现电机的高效运行。
绝缘设计对于盘式永磁无刷直流电机的可靠性至关重要。线圈绝缘材料的选 用和结构设计直接影响到电机的电气性能和机械特性。在电磁设计中,应充分考 虑绝缘材料的电气性能和机械性能,以满足电机在高温、高湿等恶劣环境下的正 常运行。
文献综述:
自20世纪50年代第一台永磁无刷直流电机问世以来,国内外学者对其进行了 广泛研究。研究内容主要包括电磁场分析、优化设计、控制策略、可靠性等方面。 在电磁场分析方面,有限元法等效磁路法、模拟仿真等方法被广泛应用。在优化 设计方面,主要从电机结构、材料、工艺等方面进行优化。
无刷直流电机设计与性能分析
无刷直流电机设计与性能分析随着电动汽车的普及和工业自动化的发展,无刷直流电机作为一种高效、精准、可控性强的电机,越来越受到工程师和研究人员的关注。
本文将探讨无刷直流电机的设计原理、性能分析以及相关应用。
一、无刷直流电机的设计原理无刷直流电机是一种利用反电动势将电能转化为机械能的装置。
与传统的直流电机相比,无刷直流电机不需要传统的碳刷和电刷组,可以减少能耗和机械磨损。
其主要部件包括定子、转子和电子调速器。
定子是无刷直流电机的固定部分,由若干个电磁铁组成。
转子则由磁铁和导电线圈构成。
电子调速器是控制整个电机的核心部件,负责接收和处理信号,并驱动转子旋转。
在无刷直流电机的工作过程中,电流通过定子的电磁铁,产生磁场。
电子调速器根据传感器返回的信号,控制定子电磁铁的通电状态,从而产生电磁力。
这个电磁力作用在转子的磁铁上,使转子旋转。
转子的旋转又会产生反电动势,通过电子调速器的处理,控制整个系统的转速和转向。
二、无刷直流电机的性能分析无刷直流电机的性能主要包括转速、转矩和效率。
1. 转速:无刷直流电机的转速取决于电子调速器的驱动信号和负载情况。
通常情况下,当负载较小时,转速较高。
而随着负载的增加,转速会逐渐降低。
2. 转矩:转矩是电机转动时产生的力矩。
无刷直流电机的输出转矩与电流成正比。
当电流增大时,输出转矩也会随之增大。
同时,转矩还受到电机的结构设计和磁铁材料的影响。
3. 效率:无刷直流电机的效率通常指电机的转动效率,即将输入的电能转化为机械功的比例。
高效率的无刷直流电机可以减少能源消耗和热量产生。
三、无刷直流电机的应用无刷直流电机在许多领域具有广泛的应用。
以下是几个典型的应用案例:1. 电动汽车:无刷直流电机作为电动汽车的动力源,具有高效率、低噪音和快速响应的特点。
它可以驱动汽车前进、制动和转向,成为电动汽车领域的关键技术。
2. 工业自动化:无刷直流电机作为工业自动化装置的驱动装置,广泛应用于机器人、传送带、工业机床等设备中。
(毕业论文)永磁无刷直流电机论文
小功率永磁无刷直流电动机的设计和仿真研究摘要永磁无刷直流电动机是把电机、电子和稀土材料的高新技术产品发展紧密的结合在一起的新型电机,它具有单位体积转矩高、重量轻、转矩惯量小、控制简单、能耗少和调速性能好等优点,因而在航天航空、数控机床、机器人、汽车、计算机外围设备、军事等领域及家用电器等方面都获得了广泛的应用。
因此,设计性能优异的永磁无刷直流电机具有重要的理论意义和应用价值。
本论文系统的研究了35w小功率永磁无刷直流电机的本体设计,包括设计方法、有限元分析、性能计算、软件仿真等。
本文主要的研究内容如下:1、综述了永磁无刷直流电机的研究现状、存在问题和发展前景,分析了永磁无刷直流电机的基本理论。
2、建立永磁无刷直流电机的数学模型,先利用解析法对该电机进行电磁设计,然后利用有限元法对电机进行优化。
3、基于星形连接三相三状态的控制电路,利用Infolytic公司的MagNet电磁场分析软件建立了永磁无刷直流电机的有限元分析模型,仿真分析其静态气隙磁场分布及动态带负载时的电机特性。
并将软件仿真所得结果与设计计算结果进行比较分析,验证了设计方法的正确性。
关键词:电机设计,无刷直流电动机,有限元分析,稳态特性第一章绪论1.1永磁无刷直流电动机的发展状况永磁无刷直流电动机是一种新型的电动机,其应用广泛,相关技术仍然在不断的发展中,该类电动机的发展充分体现了现代电动机理论、电力电子技术和永磁材料的发展过程。
其中,永磁材料、大功率开关器件、高性能微处理器等的快速发展对永磁无刷直流电动机的进步功不可没。
1821年9月,法拉第建立的世界上第一台电机就是永磁电机,自此奠定了现代电机的基本理论基础。
十九世纪四十年代,人们研制成功了第一台直流电动机。
1873年,有刷直流电动机正式投入商业应用。
从此以后,有刷直流电动机就以其优良的转矩特性在运动控制领域得到了广泛的应用,占据了极其重要的地位。
随着生产的发展和应用领域的扩大,对直流电动机的要求也越来越高。
永磁无刷直流电机建模与分析
纯电动汽车电机控制系统建模与性能分析摘要电动汽车具有清洁无污染,能量来源多样化、能量效率高的特点,又便于实现智能化管理,可以解决燃油汽车带来的能量、环境以及交通等一系列问题,因此电动汽车已成为世界各国的研究热点。
我国的电动汽车技术还处于起步阶段,各方面的关键技术都需要研究解决。
电机及其控制技术是电动汽车的关键技术之一,是研究开发电动汽车首要解决的问题。
普通直流电机采用机械式换向器实现端口直流量与绕组内交变量之间的相互转换,运行中电刷和换向器之间必须保持滑动接触,因而难以避免地会存在火花,噪音,无线电干扰、片间电压限制、运行维护周期和环境运行保障等许多问题。
正因如此发展无刷式直流电机近年来一直受到人们额特别重视。
永磁无刷直流电机BLDCM(特别是稀土永磁电动机,以后无刷直流电机用BLDCM英文缩写代替永磁无刷直流电机电机)是近年来迅速发展的起来的一种新型电机,他利用电子换向代替机械换向,既具有直流电机的调速性能,且不需要其他设备的配合只要改变输入或励磁电压电流就能实现调速,又有交流电机结构简单、运行可靠、未付方便等优点。
而且体积小、效率高,在许多领域得到广泛的运用。
关键词:无刷直流电机;机械换向;电子开关线路(电子换向装置);转子位置传感器Electric car permanent magnet brushless dcmotor control system researchABSTRACTElectric cars a clean non-polluting, diversification of energy sources, energy efficiency high characteristic, and is easy to realize intelligent management, can solve the fuel car of energy, environment, and a series of problems such as traffic, so the electric car has become a research focus all over the world. Electric car technology is still in its infancy in our country, to solve all aspects of the key technology need to research. Motor and its control technology is one of the key technologies of electric vehicles, electric cars, is a research and development's priorities.Common dc motor port straight flow is realized by using mechanicalcommutator and mutual transformation between variables on winding stated, in the operation of the must keep sliding contact between brush and commutator, so inevitably there are spark, noise, radio interference, voltage limit, maintenance cycle operation and environmental protection and many other problems. Because of this development type brushless dc motor has been in recent years people pay special attention to his forehead.Permanent magnet brushless dc motor (especially rare earth permanent magnet motor) is developing rapidly in recent years the rise of a new type of motor, he used the electronic commutation to replace the mechanical commutation, both has the dc motor speed control performance, and do not need other equipment to cooperate as long as change input or excitation voltage current can realize speed regulation, and ac motor has simple structure, reliable operation, convenient without paying. And small volume, high efficiency, has been widely used in many fields.Key word: brushless dc motor; mechanical commutation; electronic switch line (electronic commutation device); the rotor position sensor目录1 绪论 (1)1.1 课题的背景及目的 (2)1.2 无刷直流电机的应用与发展方向 (3)1.3 国内外电机控制研究现状 (3)1.4 课题研究的目的和内容 (4)2 永磁无刷直流电机的结构和工作原理2.1 永磁无刷电机的结构 (5)2.2 永磁无刷直流电动机的工作原理 (5)2.3 永磁无刷电机稳态计算基本公式……………………………………………………3永磁无刷直流电动机的Matlab在建模基础上仿真结果及分析…………….3.1 永磁无刷直流电机的Matlab建模3.2 永磁无刷模型的仿真结果………………………………………………………………….3.3 仿真结果分析……………………………………………………………………………………….4 位置信号及其检测技术4.1 传感器位置检测4.2 无位置传感器位置检测4.3 电动汽车用永磁无刷电机位置检测5 永磁无刷电机的控制器………………………………………………...5.1 速度单闭环控制电路5.2 数字PID控制器算法及控制原理5.3 PWM控制的定义及技术的原理……………………………………………………………..5.4 控制器模块的具体分析……………………………………………………………………..….总结致谢参考文献I绪论1.1课题的背景及目的由电动机驱动的汽车。
《无刷直流电机的关键技术研分析综述3000字》

无刷直流电机的关键技术研分析综述目录无刷直流电机的关键技术研分析综述 (1)1.1无刷直流电机的结构 (1)1.1.1电机本体 (1)1.1.2位置传感器 (2)1.2无刷直流电机的工作原理 (2)1.3无刷直流电机的数学模型 (5)1.3.1电压方程 (5)1.3.2感应电动势方程 (6)1.3.3工作特性 (6)1)启动特性 (7)2)调速原理 (7)工作条件:保持电压U=U N,保持电阻R=R a (7)1.1无刷直流电机的结构无刷直流电机本体总体结构示意图如图1.1所示。
图1.1无刷直流电动机的结构示意图其中,1为主定子、2为主转子、3为传感器定子,4为传感器转子,5为电子换向开关电路。
1.1.1电机本体电机本体在结构上与永磁同步电动机相似,是由定子和转子组成的。
图1.2无刷直流电机本机截面示意图无刷直流电动机电枢绕组放到定子上。
多相绕组与电子开关电路相连接。
绕组联结方式有两种:星型联结和三角形联结。
在电机运行过程中,定子绕组在能量转换部分扮演着主要角色。
转子是电动机的传动装置,通电后的定子绕组的合成磁场和转子产生的磁场相互作用产生转矩使得转子的转动。
由三部分组成:永磁体、支撑部件和导磁体。
永磁体和导磁体是形成磁场的核心部件,在很大程度上决定了电动机的特性。
可分为凸出式、嵌入式和插入式三种。
1.1.2位置传感器位置传感器是无刷直流电动机系统的关键部件之一,也是区别于有刷直流电动机的主要标志。
其作用是:实时检测转子的位置,将转子的位置信号转换成电信号,为主控芯片转子位置信息,使主控芯片发出正确的换相信息,以控制功率开关器件使其导通或者截止,使电动机电枢绕组中的电流能够随着转子位置的变化而按次序换相通电,气隙中形成步进式的旋转磁场,从而驱动转子连续不断地旋转。
无刷电机霍尔位置传感器是将有关外围电子元件集成在一起,组成一个有源的磁敏集成电路。
通常将霍尔芯片(一矩形半导体薄片)、放大器、温度补偿电路、电源稳压电路、输出级等制作在同一块硅片上,然后用塑料封装。
永磁无刷直流电机稳态特性的状态空间分析

第 17 卷第 1 期
贺益康等 永磁无刷直流电机稳态特性的状态空间分析
19
4 120° 导通方式的状态空间分析
图 2 给出了有代表性的逆变器 120° 导通方式下 的 a 相电流 i as 波形及相应开关管 、二极管的导通 状态 。根据三相变量的对称性 , 一个完整周期可划 分为六个不同状态区间 , 可将状态 1 的 β =π/ 3 范 围选择为计算区间 , 它开始于晶体管 VT6 关断时 刻 , 终止于 VT3 导通时刻 。
18
电工技术学报
2002 年 2 月
规则且无法用函数表示时 , 这种方法就不能直接应 用 。为此 , 本文将采用离散处理气隙磁链波形并求 出相应磁链导数的方法来改进算法 , 以进一步拓展 该方法的实用范围 。
由于逆变器对称触发工作 , 稳态时系统状态方 程定常 , 因此电机系统的三相变量如电压 、电流 、 磁链等均呈现所谓的 60° 对称性 。如用 f 广义地代 λ 表 u , i 或 , 则三相变量 60° 对称关系的矩阵表达 形式为 [ 4 ]
He Yikang Yan Lan ( Zhejiang University 310027 China)
摘要 采用输入函数离散化的状态空间方法 , 对永磁无刷直流电机的稳态性能进行直接稳态 仿真 。由于描述行为特性的状态方程以电机参数和实际磁场空间分布为基础建立 , 又计及开关元 件的换流重叠过程 , 因而这种稳态计算技术给实际电机的运行特性预测提供了一种准确 、有效的 分析手段 。 关键词 : 永磁无刷直流电动机 输入函数离散化 状态空间分析 稳态仿真 中图分类号 : TM351 Abstract In this paper , a state - space approach with discreted input function to steady state perfor2 mance simulation of a permanent magnet brushless DC motor ( PMBLDCM) was discussed1 As the state space equation served to define the steady state performance of the motor was formulated on the basis of motor
简介永磁无刷直流电机的原理及特点
成 本 低廉 等 诸 多 优 点 使 得 串 励 电机 在 电动 工 具 电机选 用 中 占据 统治 地 位 多 年 。
随着动力 电池技术进 步,特 别是动力锂 电
池 技 术 的 快 速 发展 ,无绳 、 强 劲 、 小 巧 便 携 的
s t r u c t u r e s a n d c o n t r o l p r i n c i p l e s o f b us r h l e s s mo t o r c o mp a r e d wi t h b r u s h mo t o r , l o o k i n g f o r wa r d t o t h e f u t u r e t r e n d o f t h e n e w mo t o r f o r p o we r t o o l s a p p l i c a t i o n s .
简介永磁 元刷 直流 电机的原理及特 点
刘 志 刚
( I : 海锐奇 I : 具 股份 仃限 公 d I : 海 2 0 1 6 1 2)
摘 要 介 绍无刷直流 电机在 电动工具中 的运用概况 ,对无刷 电机 相比有 刷电机 的特点、结 构和控制原理进行分析 ,展望对 电动工具应用新 型电机 的未来 趋势。
的 专 利构 建 了 无刷 直 流 电动 机 的雏 形。1 9 6 2 年 ,由 T. G. Wi l s o n和 P. H. Tr i c k e y提 出 “ 固 态换 相 直 流 电机 ” ( DC Ma c h i n e wi l h S o l i d
工 具 的 市 场 占 比 。有 专 家 预 言 : 电动 工 具 的 未 来在 于 锂 电等新 能 源 工具 ;
永磁无刷直流电机及其控制

永磁无刷直流电机及其控制随着科技的不断发展,永磁无刷直流电机(BLDC)逐渐成为现代电机控制领域的重要角色。
本文将详细介绍永磁无刷直流电机的原理、结构、应用,以及其控制策略。
永磁无刷直流电机是一种采用永磁体产生磁场,通过电子换向器取代机械换向器,实现无接触换向的直流电机。
其工作原理是将电能的电子脉冲信号转换为机械能,进而驱动电机运转。
永磁无刷直流电机的结构主要由定子、转子、电子换向器和永磁体组成。
其中,定子由铁芯和电枢绕组组成,转子则由永磁体和导磁体组成。
电子换向器的作用是控制定子绕组的电流方向,以实现无接触换向。
由于永磁无刷直流电机的诸多优点,如高效率、低噪音、高可靠性等,使其在许多领域得到了广泛应用。
例如,在工业自动化、机器人、电动汽车、航空航天等领域,永磁无刷直流电机都有着一席之地。
永磁无刷直流电机的控制策略主要涉及电流控制和转速控制两个方面。
在电流控制方面,需要通过调节电枢绕组的电流大小和方向,以实现电机的力矩和方向控制。
在转速控制方面,则可以通过调节电枢绕组的电流频率,实现电机的调速控制。
常用的控制算法包括PID控制、模糊控制、神经网络控制等。
永磁无刷直流电机以其高效、可靠、节能等优点,在许多领域得到了广泛应用。
随着科技的不断进步,对永磁无刷直流电机的控制策略和控制精度提出了更高的要求。
未来,我们需要进一步研究新的控制方法和算法,以提高永磁无刷直流电机的性能和适应性,为各领域的发展贡献更多力量。
随着环境保护意识的不断提高和能源紧缺的压力,电动汽车作为一种清洁、高效的交通工具,逐渐获得了广泛的应用。
其中,永磁无刷直流电机作为电动汽车的核心动力部件,其控制技术的研究与应用显得尤为重要。
本文将对电动汽车用永磁无刷直流电机控制技术进行深入探讨。
电动汽车是指使用电力驱动的汽车,与传统汽车相比,电动汽车具有零排放、低能耗和高效率等优点。
随着政府对新能源汽车的支持力度不断加大,电动汽车的市场份额也在逐渐扩大。
永磁无刷直流电机介绍和工作原理

C
永磁 Y 电机
D2 H1 H2
iB
B
H3 转子位置传感器
(T5、T6 )
永磁无刷直流电机
(T6、T1) (T1、T2 ) (T2、T3 ) (T3、T4 ) (T4、T5 ) (T5、T6 )
1200
60 0
永磁无刷直流电机
(T6、T1) (T1、T2 ) (T2、T3 ) (T3、T4 ) (T4、T5 ) (T5、T6 )
1)H1受光,V1导通,A相 流过电流,产生磁势Fa。
电流路径:电源正极—A相 绕组—V1管—电源负极。
2)电机顺时针转过120度后, H1被遮光,H2受光,V1关 断,V2导通,B相绕组通入 电流,产生磁势Fb。
3)再转过120度,C相导通。
A相通电
Ff
Ff
Fa
永磁无刷直流电机
B相通电
上述过程可以看成按一定顺序换相通
永磁无刷直流电机介绍和工作 原理
永磁无刷直流电机
控制系统组成简图
直流电源
逆变器
电机本体
输出
控制信号
控制器
位置检测器
永磁无刷直流电机
二、无刷直流电动机的工作原理
传统直流电动机的工作原理
磁极 电枢
换向片
➢ 磁极静止,电枢旋转
➢ f电=I磁Bl转a,矩这个力形成
➢ 根据左手定则,线圈 在这个转矩作用下将 按逆时针方向旋转
电的过程,或者磁场旋转的过程,定
子各相绕组在气隙中所形成的旋转磁
场是跳跃运动的,一周内有三种状态,
每种磁场状态持续120°,他们跟踪
转子并与转子的磁场相互作用,产生
驱使转子旋转的电磁转矩。
F a'
永磁无刷直流电机的电磁分析与设计

东南大学硕士论文
.1.
第~章绪论
个磁场的方向在直流电动机运行的过程中始终保持垂直,从而驱动电机运转并 产生最大转矩。永磁无刷直流电机则刚好相反,为了实现无电刷换向,就需要 将电枢绕组放在定子上,而永磁体则放在转子上。但仅此还不够,因为用一般 直流电源给电机定子绕组馈电,只能产生固定磁场,它不能与运动中转子磁钢 所产生的永磁磁场相作用,以产生单一方向的转矩来驱动电机转子转动。因此, 永磁无刷直流电机除了电动机本体外,还要由位置传感器、逆变器触发逻辑电 路和功率逆变器共同构成电机驱动系统,根据位置传感器检测的电机转子位置, 供逻辑电路按一定的逻辑触发逆变器,给电机定子绕组馈电,其目的是使在永 磁无刷直流电机的运行过程中电机定子绕组所产生的磁场和转动中的转子磁钢 所产生的永磁磁场,在空间上始终保持相差z/2左右的电角度。
成线性关系,控制性能比异步电动机更好。
与开关磁阻电动机相比,由于它一般采用实心转子结构,转子上既没有绕
组也没有永磁体,因此结构更加简单可靠,适合高速与超高速运行,而且由于
开关磁阻电动机功率回路单元不存在桥臂内部的换流,从而不存在桥臂直通现
象,简化了电路结构,控制器成本较低。但是开关磁阻电动机的功率密度和效
根据逆变器所采用器件的不同,一般将它们分为两类:采用品闸管作为逆 变器功率器件的电机,一般称为晶闸管无换向器电机;另一类采用MOSFET, GTR,IGNT等自关断器件作为逆变器功率器件。本文讨论的就是这类电机。 对于这类电机,按电机绕组相数的不同,电机可分单相、两相、三相和多相: 根据绕组连接方式的不同,可分星形绕组和封闭绕组:根据换向线路与绕组连 接方式的不同,有全桥和半桥之分;按反电势波形的不同,又可分为方波形和 正弦形两种。
永磁无刷直流电机介绍和工作原理

永磁无刷直流电机 正弦波PMSM调速系统的组成
一种典型的正弦波永磁同步电动机调速系统框图
永磁无刷直流电机
永磁无刷直流电动机结构特点:
• 定子绕组采用整距、集中绕组; • 永磁体粘接至转子表面,呈隐极式结构;
图10.16 永磁无刷直流电动机的主磁场磁密波形图
永磁无刷直流电机
永磁无刷直流电动机 定子绕组感应的相电势和电流波形
永磁无刷直流电机
无刷电机专用驱动电路 MC33035
永磁无刷直流电机
无刷电机专用驱动电路 MC33035
永磁无刷直流电机
无刷电机专用驱动电路TDA1621
LM621的原理框图
LM621的换相译码真值表
永磁无刷直流电机
无刷电机专用驱动电路TDA1621
永磁无刷直流电机
无位置传感器无刷电机专用驱动芯片TDA5142T
永磁无刷直流电机
永磁同步电动机的发展前景
1. 更高的节能效果。永磁同步电动机采用永磁体励磁,无需励磁电流,所以 可以显著提高功率因数。定子电流小,转子无铜耗。比一般的异步电动机 效率提高2%~8%,尤其轻载运行节能效果显著。
2. 可满足某些工业需求大的启动转矩和最大转矩倍数的要求。
3. 低速驱动的需求。为了提高控制精度,减少震动噪音,也为了大转矩驱动 要求,近年来对低速电动机的需求不断增长,如:电梯拖动用永磁同步曳 引机,转矩提高十几倍,取消了庞大的齿轮箱,通过曳引轮直接拖动轿厢, 明显减小了噪音和震动;又如:船用吊舱式电力推动器,将低速大转矩永 磁同步电动机置于船舱外的吊舱,无需原来的传动系统,直接驱动螺旋桨。 四门子公司吊舱式推进器中PMSM容量已达30000KW。
电的过程,或者磁场旋转的过程,定
子各相绕组在气隙中所形成的旋转磁
第三章直流电机的稳态分析.ppt修改
我们首先分析一个简单的物理模型,图中N.S是一对磁铁,它 可以是永久磁铁,也可以为电磁铁,所谓电磁铁就是在磁极 铁心上绕上励磁线圈且通入直流,便产生固定的极性。
力的大小为 f=BLI 方向由左手定则判断
作用在线圈上的转矩 T=BLID
应保持每极下导体中电流的方向不变, 即流过线圈中的电流方向及时的加以变换, 即进行所谓”换向”,为此必须增加换向器装置.
五、直流电机的额定值
每台直流电机绕组的机座都有一个铭牌,上面标注一些额定数据, 若电机运行时,各数据符合额定值,这样的运行情况称为额定工况, 在额定下运行,可保证电机可靠的运行,并具有优良的性能. 根据国标,直流电机的额定数据有:
1、额定功率 PN (千瓦KW) 2、额定电压 UN (伏V) 3、额定电流 IN (安A) 4、额定转速 nN (转/分 r/min) 5、额定励磁电压 UfN (伏V) 6、额定励磁电流 IfN (安A) 注、对发电机额定功率为 PN= UN IN
他励
励磁方式自
并励 励串励
复
积复励 励长 差复 复励 励
短复励
1、他励直流电机 励磁绕组与电枢绕组无联接关系, 而由其他直流电源供电的直流电机电枢电流等于负载电流 Ia=I 2、并励直流电机
励磁绕组与电枢绕组并联后加同一电压 . 对发电机: Ia=I+If 对电动机: I=Ia+If
对电动机额定功率为 PN= UN INηN
P1= UN IN
3-2直流电机的电枢绕组
电枢绕组是直流电机的电路部分,
也是直流电机的核心部分,是实现 机电能量转换的枢纽,无论是电动 机还是发电机,它们的电枢绕组在 磁场中旋转,都会感应出电势,当 电枢中有电流时,又产生电磁转
直流永磁同步无刷电机解读
FOC电机控制技术背景
使用两个数学变换:Clarke 变 换和 Park 变换,根据A、B两 相电流计算出相对转子的q、d 轴的作用电流,也即相当于得 到相对于转子力臂垂直方向和 轴向的作用力。
FOC电机控制技术介绍
FOC电机控制坐标变换简介 2
FOC电机控制坐标变换简介
2.1 CLARKE 变换
α
q
d
β
FOC电机控制技术介绍
FOC无位置传感器运行简介 3
FOC无位置传感器运行简介
由于电机反电动势与转子位置一一对 应,这给电机的无传感器运行带来可 能,但由于每个相线在整个正弦周期 始终处于通电状态,我们无法像方波 驱动电机那样直接通过测量反电势来 判断电机的位置,所以要通过建立电 机模型,通过检测电流的变化来推断 电机的反电动势。
无传感器风扇控制器视频: /v_show/id_XNzQ2MDEzNjQ w.html
FOC电机控制技术背景
在 六 步 换 向 法 中 , 定 子 磁 场 扭 矩 只 有 六 个 方 向
FOC电机控制技术背景
转子在60°范围内受力方向始终不变,造成定子磁场形成的扭力与转子力臂轴的夹角 不能维持在90度,而且转矩力度也没有精确控制,这样的控制方法不利于提高电机效 率及动态响应。
FOC电机控制技术背景
2.FOC 怎样保证驱动力与转子力臂轴垂直? 该测量什么信号作为参考?
FOC电机控制技术背景
FOC(Field Oriented Control, 磁场定向控制) 与 SVPWM(空 间矢量脉宽调制, Space Vector Pulse Width Modulation)的相同点与不同点
FOC电机控制技术背景
dsPIC33EP系列简介
永磁无刷直流电动机的静动态特性分析

;
齿槽转矩的谐波次系数
v = 2pQs k
(7)
Nm
其中 , Nm —定子槽数 Qs 与极数 2p的最大公约数 。 由式 ( 5) 、( 6)可知 : ( 1 )采用定子斜槽或转子斜极均可削弱谐波
转矩 。在考虑不同齿极数配合的基础上提出斜槽
系数 ,当斜槽系数 :αsk
= kQs Nc
(k
1 引言
由于永磁无刷直流电动机 (BLDCM )具有效 率高 、转动惯量小 、控制方便 、控制精度高等优点 , 在自动控制 、航空航天 、汽车工业和家用电器等领 域都得到了越来越广泛的应用 [ 1 ] 。但由于定转 子齿槽及电枢反应的存在 ,使得就正弦型 BLDCM 而言 ,绕组的反电势并非正弦型 ;而方波型 BLD2 CM 反电动势并非理想的梯形波 ,其中含有较大 的齿谐波磁场 ,会引起电机转矩的脉动 ,电机的振 动和噪声 。如何减小电磁转矩的脉动是近年来从 事电机研究的人员普遍关心的问题 ,而要分析电 磁转矩的脉动 ,首先就应分析电机气隙磁场的分 布 。本文在有限元分析电机内电磁场分布的基础 上提出减小电机转矩脉动的一些方法 ,并同时对 电机起动和突然改变负载时的动态过程进行了仿 真。
( EXPLOSION
-
PROO F
EL
ECTR
IC
MACH
IN
E)
2005年第 第 40卷 (总第
6期 127期
)
槽转矩的幅值会显著减小的 。 ( 3)通过调整永久磁极的宽度 、采用虚槽 、减
小定子槽口宽度和使用磁性槽楔来削弱齿槽转 矩 。但磁性槽楔会引起槽漏抗增加 , 增大了电路 的时间常数S huhong, L iu Hu ifei and X ong Guangyu Abstract M agnet field distribution and static characteristic of permanent2m agnet brushless dc motor ( BLDCM ) at no2load and load are analyzed and calculated by Ansoft software and various methods of reducing torque pulsation of this kind of motor are dis2 cussed on this basis. In the meantime, dynam ic state characteristic of motor during start2 ing and transient load changing are sim ulated by Ansoft/ transient software. Analytic re2 sults can be referred for design and using of this kind of motor in particular for design of controlling system. Key words Permanent2magnet brushless dc motor, static state characteristic, dy2 nam ic state characteristic.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引言
永磁无刷直流电机具有速度可调 、功率密度及 系统效率高 、控制方便 、运行可靠等显著特点 , 在 伺服控制 、电动车辆 、机器人技术及家用电器等领 域得到了越来越广泛的应用 , 人们对其特性预测的 兴趣也不断浓厚 。目前已有不少涉及其稳态特性计 算的论文 [1 ,2 ,3 ] , 其中以 R1R1Nucera 等对圆形永磁 转子 ( 正弦形反电势) 无刷直流电机的状态空间分 析和 Z1Q1Zhu 对转子表面安放铁氧体 ( 梯形反电 势) 电机的解析数字计算最为成功 , 获得了很多有 关电机稳态的波形信息 , 可进而分析其运行特性 。 然而他们的工作均是在求得电机系统方程解析解的 基础上完成的数值计算 , 不仅有不少理想化假定 ,
Ls KD = ωr 0
T
( 10)
0
Ls
0 0
Ls - ωr ; Kx = -
rs
0
rs
0 0
rs
0 0 0 0
- ωr
0 1/ 3
KU1 =
-1
0 0 0
0
0
- ωr
1/ 3
- 2/ 3
0
A = KD1 ・KX
1 B 1 = KD ・KU1
状态变量方程 ( 10) 的解答为
t
X ( t) = e
He Yikang Yan Lan ( Zhejiang University 310027 China)
摘要 采用输入函数离散化的状态空间方法 , 对永磁无刷直流电机的稳态性能进行直接稳态 仿真 。由于描述行为特性的状态方程以电机参数和实际磁场空间分布为基础建立 , 又计及开关元 件的换流重叠过程 , 因而这种稳态计算技术给实际电机的运行特性预测提供了一种准确 、有效的 分析手段 。 关键词 : 永磁无刷直流电动机 输入函数离散化 状态空间分析 稳态仿真 中图分类号 : TM351 Abstract In this paper , a state - space approach with discreted input function to steady state perfor2 mance simulation of a permanent magnet brushless DC motor ( PMBLDCM) was discussed1 As the state space equation served to define the steady state performance of the motor was formulated on the basis of motor
隐极圆形转子永磁电机的电磁转矩可表达为 θ Te = p/ 2λ m [ ( i as - 1/ 2 i bs - 1/ 2 i cs) cos r +
3 / 2 ( i bs - i cs) sinθ r]
( 3)
式中 p — — — 极数 λ — — 互感磁链幅值 m—
© 1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
第 17 卷第 1 期
电工技术学报
2002 年 2 月
永磁无刷直流电机稳态特性的状态空间分析
A State - Space Approach to Steady - State Performance of a Permanent - Magnet Brushless DC Motor
贺益康 严 岚 ( 浙江大学电气工程学院 310027)
18
电工技术学报
2002 年 2 月
规则且无法用函数表示时 , 这种方法就不能直接应 用 。为此 , 本文将采用离散处理气隙磁链波形并求 出相应磁链导数的方法来改进算法 , 以进一步拓展 该方法的实用范围 。
由于逆变器对称触发工作 , 稳态时系统状态方 程定常 , 因此电机系统的三相变量如电压 、电流 、 磁链等均呈现所谓的 60° 对称性 。如用 f 广义地代 λ 表 u , i 或 , 则三相变量 60° 对称关系的矩阵表达 形式为 [ 4 ]
rs — — — 定子绕组每相电阻 D = d/ d t
对于一个对称的三相电源系统和平衡的三相负 载 , 变流装置对称触发工作 , 电路处于稳态时三相 磁链也应表现出对称性 , 即在时间上互差 120° 。因 此只要求出一相磁密在 0~180° 的空间分布及其导 数在 0~180° 的空间分布 , 就可以求得其他两相及 其导数在 0~60° 的空间分布情况 , 从而为稳态特性 的状态空间求解提供了正确的输入值 。
联立式 ( 8) 与式 ( 6) , 整理可得 DX = A ・ X + B 1・ U - 1 - 1 = KD ・ Kx ・ X + KD ・ KU1 ・ U 其中 T X (ωr t ) = [ i as , i bs , i cs ] λ λ λ U (ωr t ) = [ UDC D ma D mb D mc ]
( n) = y′ y ( n + 1) - y ( n ) y ( n + 1) - y ( n ) = x ( n + 1) - x ( n ) h ( 7)
0 0
rs
0
rs
i bs + D λ bs i cs
( 1)
0
λ cs
考虑定子绕组 Y 接时三相电流之和为零 , 则 定子磁链方程可写为 λ λ Ls 0 0 i as as ma λbs = λ cs
贺益康 男 , 1941 年生 , 浙江大学电气工程学院教授 , 博士生导师 , IEEE 高级会员 , 主要从事电机及其控制 , 交流调速技术等研究 。 严 岚 男 , 1977 年生 , 浙江大学电气工程学院电机与电器专业博士研究生 , 主要从事电机及其控制研究 。
© 1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
u bs = ucs uas U bs < 0)
( 8)
2 UDC/ 3
- UDC/ 3 ( i bs > 0) - UDC/ 3 ( 9)
或
u bs = ucs
图2 120° 导通模式及 a 相电流波形 Fig12 120° Conduction mode and current waveform of phase a
由于绕组电感的影响 , 当 VT5 关断时 b 相将仍 有电流经 VD2 ( 当 i bs < 0 ) 或 VD6 ( 当 i bs > 0) 续 流。这样 , 120° 导通方式下将有两种不同的电路拓扑 结构存在 : ① 定子三相均接至逆变器输出的换流模 式 , 如图 3a 或 3b 所示 ; ② 定子 a 、c 两相接至逆变 器输出而 b 相开路的单流模式 , 如图 3c 所示。
parameters and actual magnetic field distribution and counting for the commutation overlapping of the power de2 vices as well , the approach will offer an accurate and effective analysis means for the performance prediction of a practical PMBLDCM1 Keywords : Permanent magnet brushless DC motor Input function discretization State space approach
u bs = u cs
0
Ls
λ ma
( 6)
0 0
0 ・D i bs + ωr D λ mb
0
λ mc
求解中需要计算各相互感磁链的导数 , 这对可 用连续 、可导函数关系描述的磁链不存在困难 , 但 实际电机磁链关系复杂 , 难以实现函数描述 , 却可 采用离散化数值处理 , 此时可用差分近似替代求导 的方法来求取输入磁链的导数值 , 即
At
) dτ ・X ( 0) + e A ( t - τ) ・B 1 ・U (τ
0
∫
( 11)
图3 电路拓扑结构
Fig13 The circuit topology structures
当输入函数 U (ωr t ) 在每个等长采样间隔 Δ T = h 内保持为常数时 ) = U ( Kh) ( Kh ≤τ ≤ Kh + h) U ( Kh + τ ( τ ) 则 B 1・ U 可以移出积分号之外
第 17 卷第 1 期
贺益康等 永磁无刷直流电机稳态特性的状态空间分析
19
4 120° 导通方式的状态空间分析
图 2 给出了有代表性的逆变器 120° 导通方式下 的 a 相电流 i as 波形及相应开关管 、二极管的导通 状态 。根据三相变量的对称性 , 一个完整周期可划 分为六个不同状态区间 , 可将状态 1 的 β =π/ 3 范 围选择为计算区间 , 它开始于晶体管 VT6 关断时 刻 , 终止于 VT3 导通时刻 。
可以证明 , 换流模式开始时刻 ( t = 0) 转子位 [1 ] 于θ / 6 处 , 其中 γ 为触发超前角 , 即 r = - γ +π 定子电流超前于反电势的相位角 。换流模式持续时 间可用换流重叠角 μ 来表示 , 由于续流的无功电 流衰减快慢与电机转速 、触发超前角 、电机参数等 有关 , 运行中 μ 为未知量 。为在选定的分析区间 β 内明确划分出换流模式和单流模式的持续时间 , 需 在两种运行模式的状态空间模型基础上采用 Newton - Raphson 方法叠代求解 μ 角 。 411 换流模式 根据图 3a 或图 3b , 有 uas UDC/ 3