运行环境特性对螺旋内窥镜机器人性能的影响
内窥镜手术机器人的研究及应用
内窥镜手术机器人的研究及应用随着医疗技术的不断进步,内窥镜手术机器人已成为一种新兴的、具有划时代意义的医疗设备。
在不久的将来,内窥镜手术机器人将成为医生们施行外科手术的一项重要工具。
内窥镜手术机器人的研究始于上世纪70年代,目的是为了提高手术效率、减少手术风险、缩短患者康复期。
随着人工智能和机器人技术的迅速发展,内窥镜手术机器人的研究也在不断加速。
内窥镜手术机器人的优势在于它可以减少手术风险。
它可以进行极小创伤手术,减少手术过程中出血和组织损伤,从而缩短患者的康复时间。
此外,内窥镜手术机器人可以根据患者身体情况和手术需要,进行高精度的手术操作,使手术质量更加稳定。
内窥镜手术机器人可以操作的范围远远超出人手的操作范围,进而提高了手术效率与精度。
内窥镜手术机器人的使用可以降低手术并发症的风险。
在传统的开放式手术中,手术切口较大,手术过程中易发生感染和其他并发症。
内窥镜手术机器人的切口小,操作相对简单,可以减少手术过程中的并发症风险。
内窥镜手术机器人的应用范围越来越广泛。
它已经被应用于普外科、心血管外科、胆道外科、妇科等领域,并逐渐发展出各种专项机器人手术平台,如达芬奇手术机器人、欧莱雅机器人等。
内窥镜手术机器人的应用将带来巨大的经济价值。
与传统的手术方式相比,内窥镜手术机器人保证了手术效果的稳定性和精度性,大大减少了医疗资源的浪费。
预计在未来的几十年内,内窥镜手术机器人的开发与应用将成为医学和科技领域的重要研究方向。
进一步提高内窥镜手术机器人的技术水平和应用范围,将成为未来医疗设备的发展方向。
我们预计,在未来几年内,内窥镜手术机器人的研究将进一步推进,内窥镜手术机器人的应用将得到进一步的扩展和改进。
内窥镜手术机器人将成为医疗领域中的创新驱动力,为人类健康事业作出更大的贡献。
内窥镜机器人技术在医疗中的应用

内窥镜机器人技术在医疗中的应用内观镜技术是一种现代医疗技术,一般用于检查人体的内部器官和进行手术。
随着技术的不断发展,内观镜技术已经不再是传统的手工设备,而是以机器人技术为基础,逐渐向智能化和自动化方向发展。
内观镜机器人设备是用机器人技术来辅助医生完成内部手术和检查的,广泛应用于医疗、教育、科研等领域。
目前,内观镜机械臂技术在国际上已成为智能外科和精密外科的重要研究领域之一,其中应用最广泛的莫过于医疗方面,下面将给大家讲解一下内镜机器人技术在医疗中的应用。
一、内观镜机器人技术简介内观镜机器人技术是一种基于机器人技术的智能医疗设备,主要应用于内部器官检查和手术。
内观镜机器人包括机器人臂、内观镜、操作台、监视器等不同部位。
这种机器人配备有高清晰度摄像头、红外线和微型摄像头等装置,来达到对人体内部器官的进行自动化观察和手术切除的目的,并且内观镜机器人通过机器学习技术实现自主操作,能够减轻医生的工作负担,降低医疗事故率,保障患者生命安全。
二、内观镜机器人技术在消化科中的应用目前,内观镜机器人技术已经广泛的应用于消化科中,尤其是内镜检查和手术。
对于胃肠道的检查,机器人内观镜可以提供更加精准、高分辨率的胃镜图像,在确保观察精度的同时,大幅度降低患者的不适感受,提高患者舒适度。
另外,在内镜切除胃癌方面,机器人内观镜技术同样具有很强的优势。
传统的内镜切除胃癌需要医生手动操作,操作难度较大,需一定的手术经验和技术,且容易出现操作质量不稳定等问题。
而机器人内观镜可以通过机器学习技术和人工智能技术,自主地定位病变部位、规范地切除癌组织,同时提高病人安全性和手术成功率。
三、内观镜机器人技术在神经外科中的应用内观镜机器人技术在神经外科领域中同样发挥了重要作用。
在传统的神经外科手术中,医生需要进行开颅或颅底入路,通过手动操作进行病变部位的局部切除,手术风险较大,同时给患者造成一定的伤害。
而内观镜机器人技术可以实现无创手术,缩小手术伤口,降低手术风险,同时提高手术精度和操作稳定性。
微创条件约束下内窥镜操作机器人运动学

zi 。
定义内窥镜目标姿态 Rt 为 Rt = R( z , β ) R( y, α ) R(a, γ )
(7)
(8)
式中
∂d 2 =0 ∂λi kw a − kw a − ck λi* = i i +1 2 i +1 i +1 k −1 1 k= ai ai +1 c = ( wi ai − wi +1ai )k
Kinematics of Laparoscopic Robot under Minimally Invasive Environment
PAN Bo FU Yili WANG Shuguo YANG Zongpeng
(Robotics Institute, Harbin Institute of Technology, Harbin 150080)
0~400 mm –90°~90° –140°~140° –45°~45° –80°~80° –75°~75° –360°~360°
0 0 0 429.6 0
d7
微创条件约束
在微创外科手术过程中,内窥镜通过患者体表 切口插入体内,由于受到体表切口限制,内窥镜只 1 沿内窥镜轴线运动的直线自由度, 具有 4 自由度: 1 绕自身轴线旋转自由度,2 绕插入点旋转自由度, 如图 2 所示。
将式(9)代入式(4)最终得到内窥镜插入点为 kw a − kw a − ck I i = wi + i i +1 2 i +1 i +1 ai k −1
(14)
R——机器人旋转矩阵
α——内窥镜绕绝对 y 轴旋转角度
(9) (10) (11)
β——内窥镜绕绝对 z 轴旋转角度 γ——内窥镜绕相对 a 轴旋转角度 目标坐标系 Txtytzt 由 Rt 唯一表示,为使内窥镜 末端坐标系 Txe ye ze 与 Txt yt zt 重合,前提是通过关 节 6 运动使 5 z7 与 ze 重合,再通过关节 7 运动使 6 x7 与 xe 重合,得
内窥镜手术机器人的设计与实现
内窥镜手术机器人的设计与实现一、引言内窥镜手术是一种现代手术方式,利用小巧灵活的内窥镜穿过病人的皮肤,进入人体内部进行手术。
内窥镜手术减少了手术对人体的损伤和伤口感染,提高了手术的安全性和手术效率。
由于人体内部的操作空间较小,操作难度较大,内窥镜手术机器人的设计与实现对于内窥镜手术具有重要意义。
二、内窥镜手术机器人的基本结构内窥镜手术机器人主要由机械臂、内窥镜摄像头、操作台和控制系统组成。
机械臂是内窥镜手术机器人的核心部件,它具有5-6个自由度,可以在狭小空间内完成精细灵活的手术操作。
摄像头用于实时观察手术情况,操作台用于控制机器人完成手术操作。
控制系统是内窥镜手术机器人的大脑,由计算机、软件和传感器等组成,可以实现对机器人的精细控制和操作。
三、内窥镜手术机器人的设计要点内窥镜手术机器人的设计要点包括机械臂结构设计、控制系统设计和图像处理等方面。
机械臂结构设计需要考虑机械臂的自由度、运动轨迹、精度和稳定性等问题。
控制系统设计需要考虑精细控制和人机交互等问题。
图像处理需要对采集到的图像进行处理和分析,实时反馈给操作者。
四、内窥镜手术机器人的应用场景内窥镜手术机器人广泛应用于心脏手术、胃肠手术、泌尿系统手术、妇科手术等领域。
内窥镜手术机器人可以大大减少手术对人体的损伤和伤口感染,提高手术的安全性和手术效率。
同时,内窥镜手术机器人还可以进行微创手术,使康复期更加快速和轻松。
五、内窥镜手术机器人的发展趋势目前,内窥镜手术机器人已经在世界上许多医院得到了应用,但是其价格昂贵、维修难度大等问题仍然是制约其广泛应用的重要因素。
未来,内窥镜手术机器人的发展趋势将集中在机器人智能化、机器人可靠性及耐用性的提升和机器人体积的缩小等方面。
随着机器人技术的不断发展,内窥镜手术机器人将在未来成为医疗行业的重要组成部分。
六、结论内窥镜手术机器人的设计与实现对于内窥镜手术的进一步发展和推广具有重要意义。
未来,随着人们对于医疗安全与效率的不断重视,内窥镜手术机器人必将成为日常手术操作的主流方式。
超声波电机在内窥镜机器人中的应用

维普资讯
超 声 波 电机 在 内窥镜 机 器人 中的 应 用
康 剑 莉
( 江纺织服装学院 , 江 宁波 351) 浙 浙 12 1
摘 要 : 阐述 了利 用弹性 流体 动 压 润滑理 论 建立 的螺 旋式 内窥 镜机 器人 的 结构 , 其驱 动 采用超 声 波 电 机 , 向运 行 的机 器人采 用 的是 纵扭 复合 型超 声 波 电机 , 轴 为充 分发挥 其 高精度 的定位 能 力提 出了利 用 步进 定位 法 实现 精确 定位 。 同时还 用 3自由度 球转 子超 声 波 电机 做 了试 验 , 果表 明 , 计 的 配合 结构 , 满 结 设 能
不 能完 全避 免 。笔 者 所 在 的课 题 组 针对 上 述 缺 陷 ,
研 制 出一种 能 自动将 医用 内窥 镜 系统 送 到人体 内腔
各个 部 位 的无损 伤 驱 动 微 型 机器 人 , 对其 运 动 特 并 性 以及机 器 人 的几个 特性 参数 的优化 等 问题作 了一
系列 的理 论 和试 验研 究u 剖。
图 1为
动 和扭 曲 等 大 幅度 体 内动 作 使 病 人 感 受 很 大 的 痛 苦 。主 动 引 导 式 ( e —rp ln ) sl po el g 内窥 镜 是 内 窥 镜 f i
无创 发展 的一 个重 要方 向。 主动 引导 式 内窥 镜 利用 可 以主动 运动 的 引 导头 , 通过 控 制 可 以 自动 平 稳 地
医 用 内窥 镜 机 器 人 整 体 结 构 的示 意 图 。它 由 带 右 螺 旋 槽 的
运行环境特性对螺旋内窥镜机器人性能的影响
( ol e f S i c ,Najn nvri fA rn ui n toa t s C l g ce e e o n n igU ies yo eoa t s dAs n ui ,Najn 1 0 6 C ia t ca r c n ig2 0 1 , hn )
。 Is tto eh nc l ein , h a gU iest (nt ue fM ca i s i aD g Z in nvri y,Ha g h u3 02 , hn ) n z o 1 0 7 C ia
20 年 l 月 06 1
运行 环 境 特 性 对 螺旋 内窥镜 机 器 人 性 能 的 影 响
陈
柏 蒋素荣 顾 大 强 。
( 京 01) 10 6
20 1 ) 1 0 6
。 南京航空航天大学理学院 南京 (
。浙 江 大 学 机 械 设 计 研 究 所 杭 州 30 2 ) ( 10 7
Ab ta t B s do h e e r h o pr ltp n o c p cmir o o t u lc l d ia o is pr l sr c a e n t er s a c fs ia y e e d s o i c or b twi d a yi rc l de .a s i h n b a t p n o c pcm ir -o o t igec l d ia o y i p o o e .Th o l e rsm ua inm o e o p— y ee d so i co r b twi sn l y i rc l d r p sd h n b s en ni a i lto d l fs i n
供 了重要的基础数据 。 关键词 螺 旋 内窥镜机器人 非线 性仿真模型 平均运动速度 4 05 6.5 中图分类号 T 2 2 2 文献标识码 A 国家标准学科分类代码 P 4.
内窥镜手术器械控制系统(手术机器人)招标技术参数
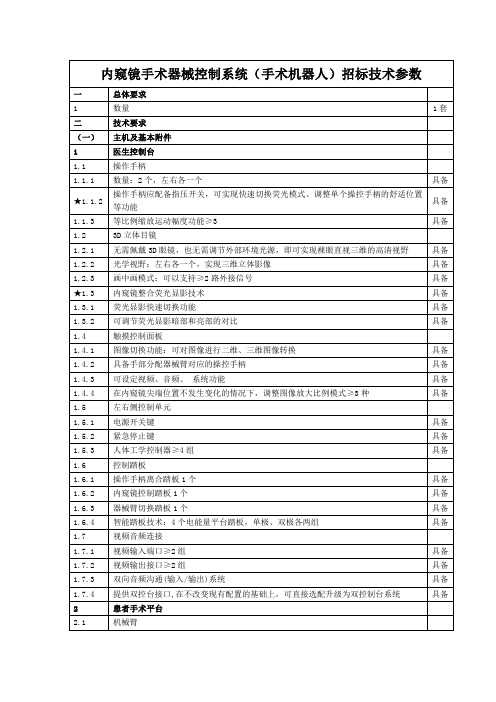
内窥镜手术器械控制系统(手术机器人)招标技术参数一总体要求1数量1套二技术要求(一)主机及基本附件1医生控制台1.1操作手柄1.1.1数量:2个,左右各一个具备★1.1.2操作手柄应配备指压开关,可实现快速切换荧光模式、调整单个操控手柄的舒适位置等功能具备1.1.3等比例缩放运动幅度功能≥3具备1.23D立体目镜1.2.1无需佩戴3D眼镜,也无需调节外部环境光源,即可实现裸眼直视三维的高清视野具备1.2.2光学视野:左右各一个,实现三维立体影像具备1.2.3画中画模式:可以支持≥2路外接信号具备★1.3内窥镜整合荧光显影技术具备1.3.1荧光显影快速切换功能具备1.3.2可调节荧光显影暗部和亮部的对比具备1.4触摸控制面板1.4.1图像切换功能:可对图像进行二维、三维图像转换具备1.4.2具备手部分配器械臂对应的操控手柄具备1.4.3可设定视频、音频、系统功能具备1.4.4在内窥镜尖端位置不发生变化的情况下,调整图像放大比例模式≥3种具备1.5左右侧控制单元1.5.1电源开关键具备1.5.2紧急停止键具备1.5.3人体工学控制器≥4组具备1.6控制踏板1.6.1操作手柄离合踏板1个具备1.6.2内窥镜控制踏板1个具备1.6.3器械臂切换踏板1个具备1.6.4智能踏板技术:4个电能量平台踏板,单极、双极各两组具备1.7视频音频连接1.7.1视频输入端口≥2组具备1.7.2视频输出接口≥2组具备1.7.3双向音频沟通(输入/输出)系统具备1.7.4提供双控台接口,在不改变现有配置的基础上,可直接选配升级为双控制台系统具备2患者手术平台2.1机械臂★2.1.1≥4个手术机械臂,内窥镜可以插在任意一个机械臂上具备2.1.2大臂旋转角度≥504°2.1.3小臂旋转角度≥177°2.1.4每一个机械臂≥4个LED指示灯具备2.1.5吊杆具有可调节和旋转功能:可将机械臂移动到患者和解剖目标的最佳位置,最大旋转角度≥+/-171°具备2.1.6患者安全距离调节功能具备2.1.7器械变化引导帮助床旁助手引导器械进入患者体内。
工业机器人主要参数及其对性能的影响

工业机器人主要参数及其对性能的影响工业机器人是在制造业领域中被广泛应用的自动化设备,具有高效、精确和可靠等特点。
在选择和使用工业机器人时,关注其主要参数是十分重要的,因为这些参数直接影响着机器人的性能。
本文将深入探讨工业机器人的主要参数以及它们对性能的影响。
一、机器人的负载能力机器人的负载能力是指它能够承受的最大负载重量。
该参数在选择机器人时至关重要,因为不同的应用场景对机器人的负载要求不同。
一般来说,机器人的负载能力越大,它在执行任务时的稳定性和可靠性就会更高。
但是,负载能力过大也会导致机器人的成本增加以及能效降低。
在选择机器人时需要根据实际需求平衡负载能力和成本效益。
二、机器人的工作范围工作范围是指机器人在三维空间内可达到的最大距离。
它由机器人的臂长、关节结构和关节扭矩等参数决定。
工作范围直接决定了机器人能够操作的空间范围,对于不同的任务需求,需要选择适合的工作范围。
较大的工作范围可以覆盖更广泛的区域,适用于大型物体处理和装配,而较小的工作范围则适用于小型物体的精细操作。
在实际应用中,需要综合考虑工作范围和机器人的运动灵活性。
三、机器人的重复定位精度重复定位精度是指机器人在多次执行相同任务时,能够重现相同位置的能力。
这个参数对于需要精确定位和重复性高的任务非常重要。
对于装配任务,重复定位精度直接关系到产品的精度和质量。
机器人的重复定位精度受到多方面因素的影响,包括机器人结构、传感器的精度和变形校正等。
在实际应用中,需要根据具体需求选择具有较高重复定位精度的机器人。
四、机器人的速度和加速度机器人的速度和加速度是决定其执行任务效率和响应速度的重要参数。
速度参数通常用线速度表示,加速度参数则描述了机器人在不同速度下的加速和减速能力。
较高的速度和加速度可以提高生产效率,缩短任务执行时间。
然而,过高的速度和加速度可能导致机器人振动和稳定性问题。
在选择机器人时需要根据任务需求以及工作环境的安全性和稳定性综合考虑速度和加速度参数。
冷光源对内窥镜操作者视觉疲劳的影响探究

冷光源对内窥镜操作者视觉疲劳的影响探究近年来,随着内窥镜技术的发展,内窥镜手术在医学领域中的应用越来越广泛。
然而,内窥镜操作者在长时间操作过程中往往会出现视觉疲劳的问题。
视觉疲劳不仅会影响操作者的工作效率和准确性,还可能引发更严重的事故。
因此,研究冷光源对内窥镜操作者视觉疲劳的影响具有重要的意义。
冷光源是一种新型的照明技术,相比传统的灯泡照明更为柔和而均匀。
它使用与可见光波段相对较小的蓝光激发荧光材料发出,减少了紫外线和红外线的辐射,降低了照明产生的热量。
与传统的光源相比,冷光源具有更好的色彩还原性和高亮度,能够提供更清晰、鲜艳的视觉效果。
初步的研究表明,冷光源对内窥镜操作者的视觉疲劳有显著的缓解作用。
内窥镜手术过程中,操作者通常需要长时间地盯着手术区域,特别是显微镜的放大图像。
传统光源可能会产生强烈的反射和眩光,给操作者的眼睛带来疲劳和不适。
而冷光源的柔和、均匀的光线能够减少反射和眩光,有效降低眼睛的疲劳程度。
因此,采用冷光源进行内窥镜手术能够使操作者更舒适地工作,提高操作效率和准确性。
此外,冷光源还具有调节亮度和色温的功能,可以根据手术情况进行灵活的调节。
对于较复杂的手术,操作者可能需要更高的亮度和更准确的颜色辨别能力;而对于长时间持续的手术,操作者可以调低亮度以减少眩光对视觉的干扰。
冷光源的自适应性能使得内窥镜操作者能够根据自己的需要进行光线调节,更好地适应手术环境。
虽然冷光源在减轻内窥镜操作者视觉疲劳方面表现出良好的效果,但仍需注意以下几点:首先,冷光源的选择和布置需要合理。
不同的手术需要不同的光源特点和配置方案。
合理的冷光源选择能够更好地满足手术需求,提升视觉效果和操作体验。
其次,冷光源的亮度和色温的调节需要根据实际情况进行。
在手术过程中,操作者需要根据手术区域的特点和要求进行精确调节,以确保视觉的清晰度和舒适度。
此外,内窥镜操作者在长时间操作过程中,应该注意适时休息和眼球放松。
视觉疲劳不仅仅与光源有关,长时间的专注会导致眼球肌肉紧张和疲劳。
内窥镜冷光源的光源稳定性分析

内窥镜冷光源的光源稳定性分析内窥镜冷光源是一种常用于医学诊断和手术的设备,其稳定性对于确保检查或操作的成功至关重要。
本文将对内窥镜冷光源的光源稳定性进行分析,并探讨其可能的影响因素和解决方案。
光源稳定性是指内窥镜冷光源输出光强的波动程度。
在医学实践中,光源的稳定性对于疾病诊断、手术操作以及患者的安全都至关重要。
如果光源的稳定性不好,可能会导致图像质量下降,影响医生对病情的判断,甚至会给患者带来风险。
内窥镜冷光源的光源稳定性受到多种因素的影响。
首先,光源本身的品质和设计对光源的稳定性有着重要的影响。
一款优质的内窥镜冷光源应具有高品质的光源模块、稳定的电源供应和精确的光源控制系统,以确保在不同工作条件下输出的光强稳定。
其次,光源的寿命也会影响其稳定性。
随着使用时间的增加,光源会逐渐老化,产生色温偏移、光强下降等问题,从而影响光源的稳定性。
因此,定期更换光源是保持光源稳定性的重要措施。
环境条件也是影响内窥镜冷光源稳定性的一个关键因素。
温度、湿度、电磁干扰等环境因素都可能对光源的稳定性产生影响。
例如,高温环境可能导致光源散热不畅,从而影响其稳定性。
要保持光源的稳定性,需要在使用过程中注意环境的控制,确保温度、湿度等参数在合理范围内。
此外,光源控制系统的设计也是光源稳定性的重要因素。
光源控制系统应具备精确的亮度和色温调节功能,并且能够及时响应用户的控制指令。
控制系统的稳定性和响应速度会直接影响光源的稳定性。
针对内窥镜冷光源的光源稳定性问题,有一些解决方案可以采取。
首先,选择高品质的光源产品是关键。
市场上有多家生产内窥镜冷光源的厂商,可以根据产品的技术参数、用户评价等进行选择。
其次,定期检查和维护内窥镜冷光源也是重要的。
定期检查可以及时发现问题并进行维修或更换,以保持光源的稳定性。
同时,注意控制内窥镜冷光源周围的环境条件,避免温度、湿度等因素对其稳定性的负面影响。
最后,光源控制系统的优化也可以改善光源的稳定性。
使用CCTV检测机器人时,工作环境有哪些要求
使用CCTV检测机器人时,工作环境有哪些要求随着人工智能和机器人技术的进展,越来越多的任务可以由机器人代替人类完成。
其中,使用CCTV检测机器人在日常生活中的应用越来越广泛。
CCTV检测机器人可以在管道、水管等狭小的空间内进行工作,检测出管道的情形,解决了传统检测方式的限制和难题。
然而,在使用CCTV检测机器人时,一个合适的工作环境是必不可少的。
以下是使用CCTV检测机器人时,工作环境需要充分的一些要求和注意事项。
1. 狭小空间的限制CCTV检测机器人是用于检测管道、水管等狭小空间的机器人,因此工作环境应当特别狭小。
通常情况下,这些机器人可以在直径为2—3英寸的管道内自由移动。
因此,在确定工作环境时,需要确保该环境够小,以便CCTV检测机器人可以轻松地巡察管道。
工作环境的大小需要依据实在的机器人和管道直径而定。
2. 工作环境是否干净乾净工作环境是否干净乾净也特别紧要。
由于CCTV检测机器人通常是在污水管道中进行工作,因此工作环境必需干净,没有紊乱的物品和其他障碍物。
污水管道中的留下的污垢和沉积物有可能会影响机器人的行动,因此在使用之前,最好从管道中清理干净。
3. 照明条件的要求工作环境的照明条件对于CCTV检测机器人的工作也是至关紧要的。
很多管道没有充分的照明条件,这会影响机器人检测到的信息量。
在这种情况下,需要添加专业的照明设备,以支持机器人在不利的光线条件下正常工作。
在操作之前,需要再次确保机器人有充分的照明工具。
4. 电力和通讯供应的需求机器人的工作需要大量的电力和通讯支持。
假如使用电池供电的机器人,需要确保充电器和电池的供应功能正常。
同时,建议使用一种支持远程通讯的机器人,以使人们能够在机器人阔别操作位置时仍能掌控它。
此外,检测结果需要传输到计算机或其他存储设备进行分析,因此需要确保通讯线路的牢靠性和稳定性。
5. 操作人员的安全需要在使用CCTV检测机器人时,也需要确保操作人员的安全。
由于CCTV检测机器人紧要用于检测一些不安全和难以到达的区域,工作环境也很可能会具有隐患。
2024年内窥镜手术辅助机器人市场需求分析

2024年内窥镜手术辅助机器人市场需求分析引言随着技术的进步和医疗水平的提高,内窥镜手术辅助机器人在医疗行业中发挥着越来越重要的作用。
内窥镜手术辅助机器人可以在手术中提供精确操控、增强视觉效果以及更小的创伤,这些优势吸引了越来越多的医院和医生使用。
本文将对内窥镜手术辅助机器人市场的需求进行分析。
1. 市场规模内窥镜手术辅助机器人市场规模庞大且不断增长。
据市场研究公司预测,全球内窥镜手术辅助机器人市场规模有望在未来几年内以每年10%的速度增长。
这主要得益于技术的不断进步以及对手术安全和效果的不断追求。
2. 医疗需求内窥镜手术辅助机器人的应用范围很广,包括普通外科手术、心脏手术、神经外科手术等。
随着人口老龄化问题的日益突出,慢性疾病的增加以及手术需求的不断增长,内窥镜手术辅助机器人的市场需求也将随之增加。
另外,内窥镜手术辅助机器人减少了手术创伤,对于患者而言也更具吸引力。
3. 优势和挑战内窥镜手术辅助机器人的优势是明显的,主要体现在以下几个方面: - 提供更精确的操控:内窥镜手术辅助机器人可以提供更稳定、更精准的手术操作,减少人为误差,提高手术成功率。
- 强化视觉效果:内窥镜手术辅助机器人配备高清晰度的显示屏和全景观察功能,可以提供更清晰的视觉效果,帮助医生更好地观察患者内部情况。
- 减少手术创伤:内窥镜手术辅助机器人可以通过微小的切口进行手术,减少患者的痛苦和康复时间。
然而,内窥镜手术辅助机器人市场也面临一些挑战: - 高昂的价格:内窥镜手术辅助机器人的价格相对较高,这限制了一些医院的采购能力。
- 技术复杂性:内窥镜手术辅助机器人的使用需要医生具备一定的操作和技术水平,这对一些初级医生而言可能是一个挑战。
4. 市场竞争目前,内窥镜手术辅助机器人市场上存在着一些主要的竞争品牌,包括Intuitive Surgical、Medtronic和Stryker等。
这些公司凭借着技术实力和品牌优势占据着市场的大部分份额。
内窥镜转弯原理范文

内窥镜转弯原理范文内窥镜是一种具有灵活性的长管状仪器,通过它可以在人体内部进行观察、检测和治疗等各种操作。
内窥镜通常由一个细长的管状探头和一个设有操作手柄的控制器组成。
探头可以通过人体的自然孔道进入并达到所要观察或治疗的区域。
内窥镜转弯原理涉及到两个关键因素:探头的灵活弯曲性和探头的受控机制。
探头的灵活弯曲性可以通过给探头提供足够的弯曲空间和灵活性来实现。
控制探头弯曲的机制一般通过一个或多个导丝或弯曲器件来实现。
导丝通常位于探头的内部,通过操作控制器上的手柄来控制导丝的运动,进而控制探头的弯曲。
内窥镜探头的转弯原理还涉及到对探头外部空间的控制。
在人体内部行进时,探头必须通过各种不同角度和位置的组织和结构,因此必须能够适应不同的内部环境。
为了实现这一目标,内窥镜通常配备了一系列的转弯器件,包括弯曲管、转向球、杆道等。
这些转弯器件可以使探头沿着所需的路径灵活移动,并顺利通过弯曲和过渡区域。
内窥镜转弯原理的应用非常广泛。
它被广泛用于医疗领域,用于进行内窥镜检查和治疗。
此外,它还用于工业领域,如管道维修和清洁,机械设备维护等。
内窥镜转弯原理的发展使得人们能够更加方便和准确地进行内窥镜操作,提高了内窥镜技术的应用范围和效果。
总之,内窥镜转弯原理是内窥镜技术中非常重要的一个基础原理。
它通过控制探头的弯曲和机械结构来实现内窥镜在人体内部的转弯。
了解内窥镜转弯原理对于内窥镜技术的学习和应用具有重要意义。
通过不断的研究和改进,内窥镜转弯原理将会不断提升,并在医疗和工业领域发挥更大的作用。
工业自动化系统中机器人视觉检测技术的使用注意事项
工业自动化系统中机器人视觉检测技术的使用注意事项随着现代工业的发展,机器人在工业生产中发挥着越来越重要的作用。
机器人视觉检测技术作为机器人系统中一项关键技术,能够实现对产品、零件等进行高效准确的检测和识别。
机器人视觉检测技术的使用对于提高生产效率、保证产品质量具有重要意义。
然而,在使用机器人视觉检测技术时需要注意一些事项,以保证其有效运行和准确性。
首先,合理选择机器人视觉系统。
机器人视觉系统通常由相机、光源、镜头、图像处理软件等组成。
为了确保检测效果的准确性,需要根据具体的应用需求选择合适的系统。
在选择适用的相机时,要考虑到相机的分辨率、帧率、动态范围等参数,以及相机与机器人系统的兼容性。
此外,光源的选择也非常重要,不同的产品和环境需要不同的光源方案,需要根据实际情况进行合理选择。
其次,进行充分的系统校准。
系统校准是确保机器人视觉检测技术准确性的关键步骤。
在校准过程中,需要对相机、光源、镜头等进行校准,以消除系统中的误差。
校准时要注意保持光源、相机、被测物之间的位置和角度稳定,确保校准结果的准确性。
此外,还需要对图像处理软件进行参数设置和校准,以确保检测算法的稳定性和准确性。
第三,需要进行充分的数据处理和分析。
机器人视觉检测技术通常会产生大量的图像数据,如何对这些数据进行处理和分析是关键。
在处理数据时,需要考虑到图像的失真、噪声等问题,采用合适的图像处理算法进行图像增强和降噪处理,以提高检测的准确性。
此外,还需要对检测结果进行分析和判断,以确定产品是否符合标准要求。
另外,实施机器人视觉检测技术时需要注意保持工作环境的稳定性。
工业生产现场通常存在振动、温度变化等干扰因素,这些因素可能会对机器人视觉系统的性能产生影响。
因此,需要采取合适的措施来保持工作环境的稳定,如增加机器人工作空间的密封性、改善环境温度控制等。
此外,还需要对机器人视觉系统进行定期的维护和保养,保持其正常运行。
最后,相关人员需要进行系统的培训和技术支持。
内窥镜机器人手术系统控制策略
内窥镜机器人手术系统控制策略一、内窥镜机器人手术系统概述内窥镜机器人手术系统是一种先进的医疗技术,它结合了机器人技术和微创手术技术,为患者提供了更为精准和安全的手术体验。
这种系统通过高度灵活的机械臂和精密的控制系统,使医生能够在远离手术台的位置,通过控制台进行手术操作,从而减少手术创伤,加快术后恢复。
1.1 内窥镜机器人手术系统的核心特性内窥镜机器人手术系统的核心特性主要包括以下几个方面:- 高度精确性:机器人手臂可以进行亚毫米级的精确移动,确保手术的精确度。
- 灵活性:机器人手臂具有多个自由度,可以在狭小的空间内灵活操作。
- 远程操作:医生可以在控制台远程操作机器人,减少直接接触患者,降低感染风险。
- 微创性:与传统手术相比,机器人手术造成的创伤更小,术后恢复更快。
1.2 内窥镜机器人手术系统的应用场景内窥镜机器人手术系统的应用场景非常广泛,包括但不限于以下几个方面:- 心脏手术:进行心脏瓣膜修复、心脏搭桥等微创手术。
- 神经外科手术:进行脑肿瘤切除、脑血管手术等高精度手术。
- 泌尿外科手术:进行前列腺切除、肾结石移除等手术。
- 妇科手术:进行子宫切除、卵巢囊肿切除等手术。
二、内窥镜机器人手术系统的技术基础内窥镜机器人手术系统的技术基础是多学科交叉融合的结果,涉及到机械工程、电子工程、计算机科学、生物医学工程等多个领域。
2.1 机器人手术系统的关键技术内窥镜机器人手术系统的关键技术包括以下几个方面:- 机器人机械设计:设计出能够适应不同手术需求的机械臂结构。
- 传感技术:利用各种传感器收集手术过程中的实时数据,如力觉、视觉等。
- 图像处理技术:对内窥镜捕获的图像进行处理,提供清晰的手术视野。
- 控制系统:开发出能够精确控制机器人手臂运动的算法和软件。
2.2 内窥镜机器人手术系统的技术发展内窥镜机器人手术系统的技术发展经历了从初步概念到临床应用的过程,包括以下几个阶段:- 概念提出:早期的机器人手术概念被提出,并开始进行理论研究。
主动可控内窥镜胶囊机器人研究

收稿日期:2009-09-11基金项目:国家自然科学基金资助项目(30570485);国家863计划资助项目(2006AA04Z368、2007AA04Z234)作者简介:李传国(1984—),男,硕士研究生,主要研究方向为肠道诊疗微型机器人。
主动可控内窥镜胶囊机器人研究李传国,颜国正,王坤东,姜萍萍(上海交通大学电子信息与电气工程学院,上海 200240)摘要:为了实现对人体胃肠道的无创诊疗,设计了一种尺蠖式内窥镜胶囊机器人。
机器人采用直流电机作为动力源,通过双轴复用减速器和丝杆螺母机构把旋转运动转化为两个串行的直线运动,分别驱动机器人的径向和轴向伸缩,并按照一定的时序配合实现尺蠖运动。
此外,还讨论了机器人的结构、运动原理以及运动的可行性。
为了检验机器人运动的可行性,做了一系列测试驱动器驱动能力的实验。
实验结果表明,驱动器可以提供平稳可靠的轴向和径向力,满足机器人在胃肠道运动的需求。
关键词:尺蠖运动;微型机器人;内窥镜胶囊;驱动器;双轴复用减速器中图分类号:TP24 文献标识码:A 文章编号:1000-8829(2010)04-0090-04D evelop m en t of M i cro 2Robot for the Acti ve Explora ti onO f the Ga stro i n testi n a l TrackL I Chuan 2guo,Y AN Guo 2zheng,WANG Kun 2dong,J IANG Ping 2p ing(School of Electr onic I nf or mati on and Electric Engineering,Shanghai J iao Tong University,Shanghai 200240,China )Abstract:For the pur pose of a noninvasive diagnostic method on intestine,an endoscope m icr o 2r obot for theactive l ocomoti on in the gastr ointestinal (GI )track is described .The m icr o 2r obot utilizes a DC mot or,thr ough multi 2stage gear trans m issi on,and the scre w 2nut t o achieve straight 2line drive and out put inchwor m r obot move 2ment with sequence in ti m e .A ls o,the structure,moti on mechanis m ,and move ment feasibility of the m icr o 2r o 2bot are discussed .I n order t o investigate the moti on feasibility of the device,a set of ex peri m ents are carried out .Experi m ent results de monstrate that the device can p r ovide a s mooth and reliable force which can meet the needs of move ment in GI .Key words:inch wor m move ment;m icr o 2r obot;endoscopy;driver;reducer with reusable t w o 2axis 恶性肿瘤发现晚,错过最佳治疗时机是死亡率居高不下的重要原因之一。
内窥镜诊疗微型机器人发展概述及前景分析
内窥镜诊疗微型机器人发展概述及前景分析作者:王辉静摘要:文章介绍依据驱动类型划分的具代表性的线缆式内窥镜诊疗机器人和无线药丸式内窥镜系统的研制情况,对体内内窥镜诊疗微型机器人的研究方向和前景进行了讨论。
医疗机器人是近几年在多学科交叉领域中兴起,并越来越受到关注的机器人应用前沿研究课题之一。
医疗机器人将机器人技术应用到医疗领域,极大的推动了现代医疗技术的发展,近年来随着MEMS(微电子机械系统)的发展,大大促进了医疗机器人的微型化,可用于人体内诊断和治疗的微型机器人的研究越来越受到重视。
内窥镜是当前体内诊疗的主要工具,线缆式微型机器人内窥镜系统和无线药丸式微型机器人内窥镜系统是肠胃道微创诊疗发展的两个最主要方向。
文章介绍依据驱动类型划分的具代表性的线缆式内窥镜诊疗机器人和无线药丸式内窥镜系统的研制情况,分析内窥镜诊疗微型机器人的相关技术难题和发展趋势。
(一)线缆式内窥镜系统线缆式微型机器人内窥镜系统利用可以主动运动的引导头引导进入人体腔道,避免了手动插入造成的软组织损伤,其关键技术在于主动引导头的微小型驱动器的研制。
目前体内医疗机器人微小型驱动器的类型大致有以下几种:电磁驱动型、形状记忆合金型(SMA型)、气动型和压电型。
1.电磁驱动型。
上海交通大学研制了一种用于肠道检查的内窥镜微型机器人,基于尺蠖运动原理,驱动器为一种基于电磁力的微小型蠕动驱动器,由头部、尾部、驱动单元、弹性模等组成,长64mm,外径7mm,重9.8g,通过调整驱动电压的频率来调节其运行速度,头部可携带CCD等微型摄像器件,将肠道的图像传输出来。
机器人各个单元之间由二自由度的铰链连接,使它可以适应蜿蜒盘曲的肠道。
2.形状记忆合金型(SMA型)。
日本东北大学的江刺研究室研制了一种采用形状记忆合金(SMA)作为驱动器的自主式医用内窥镜,利用MEMS技术,研制适合于人体管道环境如结肠中动作的装置,是一种整支导管可独立弯曲的多关节驱动的内窥镜,导管直径为1.2mm,每个关节的驱动器采用形状记忆合金驱动器,通过电阻值反馈控制法,可对导管实现自动柔顺且安全的操作。
内窥镜柜子行业深度研究报告

绿色环保
随着环保意识的提高,内窥镜柜 子行业将更加注重绿色环保,推 广环保材料和技术,减少对环境 的影响。
06
内窥镜柜子行业风险与机 遇
行业风险分析
市场竞争激烈
随着内窥镜柜子行业的快速发 展,竞争日趋激烈,企业面临
市场需求分析
医疗设备更新换代
微创手术普及
随着医疗技术的不断进步,医疗机构 对内窥镜柜子的需求逐渐增加,尤其 是一些老旧设备的替换和升级。
微创手术的普及推动了内窥镜柜子市 场的增长,因为内窥镜柜子是微创手 术中必备的设备之一。
基层医疗机构需求增长
随着基层医疗服务的普及和提升,基 层医疗机构对内窥镜柜子的需求也在 增加,以满足日常诊疗和手术的需求 。
及时关注政策法规的调整变化,加强与政 府部门的沟通合作,为企业发展创造良好 的外部环境。
感谢您的观看
THANKS
政策环境变化趋势
持续优化
未来,政府将继续加大对内窥镜柜子 行业的支持力度,推动行业持续创新 和发展。同时,政府也将进一步完善 相关政策和法规,以适应市场的变化 和行业的发展需求。
环保要求提高
随着环保意识的增强,政府对内窥镜 柜子行业的环保要求也将进一步提高 。企业需要加大环保投入,推动绿色 生产,以满足政策要求和市场趋势。
风险与机遇并存下的行业发展策略
加强技术创新和研发
深化市场调研和客户需求分析
企业应加大研发投入,提升自主创新能力 ,以应对激烈的市场竞争和技术更新换代 的挑战。
通过深入了解市场需求和客户痛点,开发 出更符合客户需求的产品和服务。
加强国际合作与交流
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
1392仪器仪表学报第27卷
统动力学及运动学性能进行了理论及实验研究。
结果表明,双圆柱螺旋内窥镜机器人能在充满液体的管道环境如胃管、肠管中快速平稳的运行,是一种性能优良的无损伤胃肠内窥镜系统驱动装置[7_8]。
这种双圆柱螺旋内窥镜机器人已经被实验证明能在离体肠道中运行。
为将这种结构简单的基于螺旋驱动原理的机器人应用到血管、尿管等超微管道中,有必要进一步简化机器人结构。
另外,这种机器人的运动性能受外部运行环境的影响的程度也是一个十分必要的研究内容。
本文在分析双圆柱体螺旋机器人前后2个螺旋机体对系统轴向驱动力的贡献的基础上,提出一种结构更为简化的单圆柱螺旋式内窥镜驱动器设计方案,并建立该内窥镜机器人的非线性仿真分析模型。
理论及实验研究单圆柱螺旋内窥镜机器人性能随环境特征参数的变化,为螺旋驱动器在血管机器人中的应用提供重要的基础性数据‘引。
达外表面与外壳内表面之间无摩擦。
微马达转轴旋转时,将带动带螺旋槽的圆柱体外壳旋转。
带螺旋槽的机体的旋转将导致液体动压效应的产生。
机体和环境管道壁之间将形成一层动压润滑膜。
由于动压力的存在,机体将受到液体轴向摩擦牵引力进而实现轴向前进运动。
图2单圆柱螺旋内窥镜机器人
与双圆柱体螺旋驱动器相比,单圆柱螺旋内窥镜机器人结构得到了进一步简化,体积减小了近一半,同时又保持了螺旋内窥镜机器人无损伤驱动方法的优点。
2单圆柱及双圆柱体螺旋内窥镜机器人
3螺旋内窥镜机器人仿真分析模型,.苎,!耋勰豫篁竺然黢单蛩黜方向黧戮器凝桨:荔蓑羹蒙鬃裟簇j:竺带夸苎鬯号竺竺2。
乞妻妻篓矍竺篁!!篓。
乏警兰芒磊茹:辜菡在蒹蓑莴磊蔷菥毒爻姜;矗荔;粉磊鬲蕞鑫兰璺。
差竺呈耄!慈慧巴:!翌妻篓圆芝鉴哮孽?譬墅要主荔盖另。
磊藉蕞篌釜芸焉i:茹茹0蔷;;荔黄≤蔷莓筹若”电机一体的右旋圆柱体反向旋转。
机器人在运行过程…7:一~:……,^”1~:…“二……………
妻鲁熹詈銎妻篓蓼冀璺篓鬯兰三兰苎苎霎主堂譬警:翼式中:t为d剪0切应Le力;^为J黏0液膜Le厚度;/Fd(ore)为/-e剪切速竺竺2曼芝茎薹詈墓掣氅景磊至芋竺篓老管警量?誊’娶暮,苫主妥荔盖等爵言≤墨嵩:言薹嚣磊熹装簇釜票蕃_苎釜竺篓窑蹇掌器雾令要!絮黧篆妻纂氅主王怒李一葛磊i≥篡;j菇磊菜藉姜;纛翥;;笳藻兰翥盖善麓
紊篓!斐制作了如图2所示的单圆柱螺旋内窥镜机器人的液藻荔釜男磊茗磊荔蒙裂蠢莓羞篇差蠢赢亲:;:=圣翥
E—j].[告髦一丛紫]si~一
儿专髦一丛静]cOS地出㈤
该机器人由1个左旋圆柱体外壳和i个微马达组成。
微马达的输出轴与外壳的内孔之间为紧配合。
微马4环境特征参数对机器人性能的影响
在内窥镜机器人运行环境特征参数中,环境黏液流 万方数据
万方数据
1394仪器仪表学报第27卷
波波幅b的变化曲线。
这里k取0.001,a。
取2.25nllTl,A取500ITln2,机体半径取2ITltn。
由图6可知,机器人的平均运动速度实验值比理论值小,两者吻合较好。
随着波幅b的增大,机器人平均运动速度理论值和实验值均逐渐减小。
图7给出了随着管壁外形正弦波波长A的变化,机器人平均运动速度的变化曲线。
这里k取0.001,a。
取2.25r13n2,b取1n]lTl,机体半径取21TIITI。
由图7可知,机器人的平均运动速度实验值比理论值小,两者吻合较好。
随着波长的增大,机器人的平均运动速度理论值及实验值均先逐渐增大,后基本保持不变。
4305
嚣
妻2。
0,
1;
0
1002003004005006007008009001000
九/121111
图7平均运动速度随A的变化曲线
6结论
本文在分析双圆柱体螺旋机器人2个螺旋机体对系统轴向驱动力的贡献的基础上,提出一种结构更为简化的单圆柱螺旋内窥镜驱动器设计方案,并建立该内窥镜机器人的非线性仿真分析模型。
利用该模型,对机器人在粘弹性直管中运行时的轴向牵引力和运动过程中形成的黏液膜最小厚度随管道壁材料的弹性模量、管道外径以及黏液黏度的理论变化规律进行了分析。
同时,考虑到内窥镜机器人系统的实际运行环境多为弯曲管道,用一个正弦波方程来描述环境管道几何外形。
理论及实验研究了随着正弦波方程的几个特征参数的变化,机器人平均运动速度的变化规律。
结果表明,在不同几何特征的弯曲管道中运行时,机器人平均运动速度理论值和实验值吻合得很好。
这些理论及实验数据都将为机器人系统的精确控制及其在血管机器人中的应用提供依据。
参考文献
[1]KATOS,AKITAH,MIYNIMAK,eta1.Fabrica-
tionofanin-pipemicrorobotmovableinsheeffssmall
intestineEc].ProceedingsoftheFifteenthAnnual
MeetingoftheAmericanSocietyforPrecisionEngi—
neering,2000:341—344.
[2]HOEGHD,SLATKINAB,BI瓜DICKJW.Bio—mechanicalmodelingofthesmallintestineasrequired
forthedesignandoperationofaroboticendoscope
[c].Proc.Int.Conf.onRobotic&Automation,
Sanfrancisco,CA,2000,4:1599-1606.
[3]MANGENEV,KINGSLEYSDA,QUINNRD,eta1.Developmentofperistalticendoscope[C].IEEE
Int.Conf.onRobotics&Automation,Washington,
IX;,2002:347—352.
[4]迟冬祥,颜国正.基于蚯蚓运动原理的微小机器人构件的运动特性分析[J].仪器仪表学报,2002,23(5):
475—479.
[5]YOSHINAKAK,TOMITAN,IKEUCHIK.Exper—imentalstudyofhydrodynamicpropulsionofamedical
devicewithaspiralribbedimpeller[J].Wear,1998,
220:141—144.
[6]IKEUCHIK,YOSHINAKAK,TOMITAN.Lowinvasivepropulsionofmedicaldevicesbytractionusing
mucus[J].Wear,1997,209:179—183.
[7]ZHOUYS,QUANYX,YOSHINAKAK,eta1.Anewmedicalmicrorobotforminimalinvasivesurgery
[J].JournalofEngineeringinMedicine,2001,215
(H2):215—220.
[8]何斌,周银生,陈鹰.新型医用微型机器人特性参数的研究口].自然科学进展,2002,12(8):882—885.
[9]陈柏,顾大强,潘双夏,等.仿蝌蚪与螺旋的泳动机器人系统的设计[J].机械工程学报,2005,41(10):
88—92.
[10]CHENB,ZHOUY,KANGJ,eta1.Biomechanicalbehaviorofdog'ssmallintestines[J].JournalofZhe—
jiangUniversityScience,2002,3(5):549—552.
作者简介
陈柏,男,1978年5月出生,博士,主要
研究方向为MEMS技术及仿生机器人。
Email:chenbye@126.corn.
万方数据。