工业机器人的结构与组成
工业机器人的系统组成及各部分作用
工业机器人的系统组成及各部分作用一、引言工业机器人是一种自动化操作装置,主要用于工业生产中重复性高、作业环境危险的工作。
它的出现不仅提高了生产效率,而且还减少了人力成本和劳动强度。
要了解工业机器人的系统组成及各部分作用,我们需要从整体系统结构、各部分功能和作用等方面进行深入分析。
二、系统组成1. 机械结构机械结构是工业机器人的主体框架,它由基座、臂部、手部等部分组成,用于支撑和连接其他各部分。
其中,基座是机器人的底部支撑,臂部是机器人的动作执行部分,手部是机器人的操作器具,通过各部件的灵活组合,可以完成各种工业操作任务。
2. 控制系统控制系统是工业机器人的大脑,包括传感器、控制器、执行器等组成部分。
传感器用于获取外部环境的信息,控制器用于对机器人的动作进行指令和控制,执行器则是根据控制器的指令完成各项操作任务。
三、各部分作用1. 机械结构机械结构的作用是支撑和连接机器人的各部分,使之能够进行灵活的运动和操作。
通过合理的结构设计,可以实现机器人的高效作业和灵活操作,提高生产效率。
2. 控制系统控制系统的作用是实现机器人的自动化操作,传感器用于获取外部环境信息,控制器通过对信息的处理和分析,指挥执行器完成任务。
这种自动化操作不仅可以提高生产效率,还可以降低人力成本和减少劳动强度,同时也能保证生产过程中的安全性。
四、个人观点和理解通过对工业机器人的系统组成及各部分作用进行全面分析,我们可以深刻理解工业机器人的工作原理和作用。
我认为,工业机器人的出现标志着人类生产方式的进步和自动化水平的提高,它不仅可以大幅度提高生产效率,还可以降低生产成本,实现可持续发展和智能制造。
五、总结与展望通过本文的探讨,我们对工业机器人的系统组成及各部分作用有了更深入的了解。
在未来,随着科技的发展和人工智能技术的应用,工业机器人的性能和作用将会不断提升,我们期待工业机器人能够在更多领域发挥作用,为人类生活和生产带来更多便利。
工业机器人的系统组成及各部分作用是一个复杂而又精密的系统工程,它的实现对于提高整个生产效率和改善生产环境起着至关重要的作用。
工业机器人本体的基本组成

工业机器人本体的基本组成
工业机器人本体的基本组成通常包括以下几个部分:
1. 机械结构:这是机器人的主体框架,包括底座、腰部、臂部、腕部和末端执行器等组成部分。
机械结构的设计需要考虑到机器人的负载能力、运动范围、精度要求等因素。
2. 驱动系统:驱动系统是为机器人提供动力的关键组件,它可以根据需要调节机器人的运动速度和方向。
常见的驱动方式有电动、液压、气压和伺服电机等。
3. 传感系统:传感系统用于感知机器人周围环境的变化,例如位置、速度、力/扭矩、温度等参数。
常用的传感器包括编码器、激光雷达、摄像头、红外线传感器等。
4. 控制系统:控制系统是机器人的“大脑”,负责接收传感器反馈的数据并进行处理,然后发出指令来控制机器人的动作。
控制系统通常由嵌入式处理器、操作系统、编程语言和人机界面等组成。
5. 执行机构:执行机构是机器人完成特定任务的关键组件,例如抓手、喷涂枪、焊接头等。
执行机构通常与末端执行器相连,可以根据需要进行调节和更换。
6. 配套软件和设备:除了机器人本体外,还需要相应的配套软件和设备来支持机器人的运行和维护。
例如机器人操作系统、编程软件、调试工具、维护手册等。
综上所述,工业机器人本体的基本组成包括机械结构、驱动系统、传感系统、控制系统、执行机构和配套软件和设备等多个部分,它们相互协作,共同实现机器人的功能和任务。
工业机器人的基本结构
工业机器人的基本结构工业机器人是一种用于自动化生产的机器人系统,它具有复杂的结构和多样的功能。
下面将介绍工业机器人的基本结构。
工业机器人主要由机械结构、传感器、控制系统和执行器四个主要部分组成。
一、机械结构工业机器人的机械结构是机器人的骨架,它决定了机器人的外形和运动能力。
机械结构包括机器人的机身、关节、连杆、末端执行器等部分。
1. 机身:机身是机器人的主体部分,承载着各个关节和执行器。
一般采用铝合金、钢材或碳纤维等材料制作,具有较强的刚性和轻量化特性。
2. 关节:关节是连接机身和连杆的部分,用于实现机器人的运动。
根据运动方式的不同,关节可以分为旋转关节和直线关节。
旋转关节可以使机器人在水平方向上旋转,而直线关节可以使机器人在垂直方向上进行上下运动。
3. 连杆:连杆是连接关节和末端执行器的部分,它们通过关节的旋转和直线运动,使机器人能够完成各种复杂的任务。
连杆一般采用铝合金或钢材制作,具有一定的刚性和强度。
4. 末端执行器:末端执行器是机器人的“手”,用于实现机器人的具体操作。
常见的末端执行器包括夹爪、焊枪、刀具等,不同的末端执行器适用于不同的工作任务。
二、传感器传感器是工业机器人的感知器官,用于获取周围环境的信息,帮助机器人做出相应的动作。
常见的传感器包括视觉传感器、力传感器、位置传感器等。
1. 视觉传感器:视觉传感器可以通过拍摄和分析图像,实现对物体的识别、定位和测量。
它可以帮助机器人在不同的工作环境中准确定位和操作物体。
2. 力传感器:力传感器可以测量机器人施加在物体上的力和力矩,帮助机器人控制力的大小和方向,实现精确的操作和装配。
3. 位置传感器:位置传感器可以测量机器人各个关节的位置和姿态,提供给控制系统进行运动控制。
常见的位置传感器有编码器、陀螺仪等。
三、控制系统控制系统是工业机器人的大脑,负责对机器人进行运动控制和任务规划。
它由硬件和软件两部分组成。
1. 硬件:硬件部分包括中央处理器(CPU)、存储器、输入输出接口等。
简述工业机器人的组成及每部分的功能。

简述工业机器人的组成及每部分的功能。
工业机器人主要由以下几个部分组成:
1. 机械结构:工业机器人的机械结构是实现机器人运动和操作的基础。
它包括臂架、关节、机械手、手爪等组件,可以具备多个自由度。
机械结构的主要功能是实现机器人的运动和操作。
2. 控制系统:工业机器人的控制系统是实现机器人工作的核心部分。
它包括控制器、编程设备、传感器等组件。
控制系统接收操作员或者计算机发出的指令,通过控制器对机械结构进行控制和操作。
同时,它还可以根据传感器的反馈信息,实现自适应和反馈控制。
3. 传感器系统:工业机器人的传感器系统主要用于获取周围环境的信息。
它可以包括接近传感器、视觉传感器、力传感器等。
传感器系统的主要功能是检测和感知周围环境的变化,为机器人的操作和决策提供数据支持。
4. 执行器:工业机器人的执行器是机械结构的驱动装置。
它可以包括电机、液压驱动器、气动驱动器等。
执行器的主要功能是将控制系统发出的信号转化为机械力或者运动,驱动机械结构进行工作和操作。
综上所述,工业机器人的组成部分主要包括机械结构、控制系统、传感器系统和执行器。
这些部分通过协同工作,实现机器人的运动、操作和感知能力,完成各种工业任务。
工业机器人的组成结构
工业机器人的组成结构
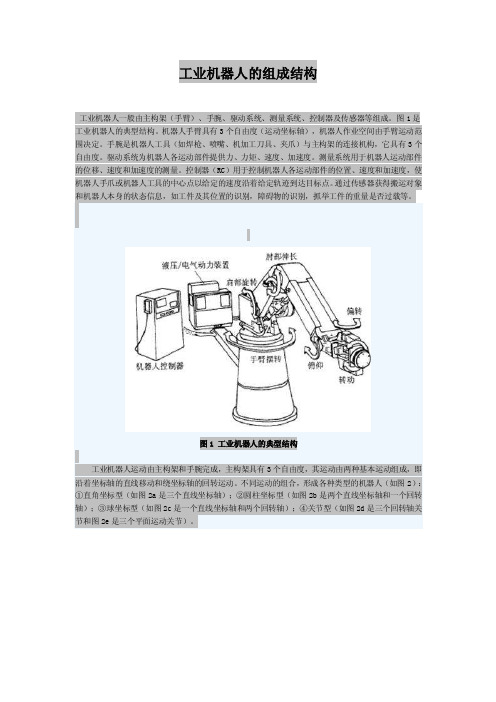
工业机器人一般由主构架(手臂)、手腕、驱动系统、测量系统、控制器及传感器等组成。
图1是工业机器人的典型结构。
机器人手臂具有3个自由度(运动坐标轴),机器人作业空间由手臂运动范围决定。
手腕是机器人工具(如焊枪、喷嘴、机加工刀具、夹爪)与主构架的连接机构,它具有3个自由度。
驱动系统为机器人各运动部件提供力、力矩、速度、加速度。
测量系统用于机器人运动部件的位移、速度和加速度的测量。
控制器(RC)用于控制机器人各运动部件的位置、速度和加速度,使机器人手爪或机器人工具的中心点以给定的速度沿着给定轨迹到达目标点。
通过传感器获得搬运对象和机器人本身的状态信息,如工件及其位置的识别,障碍物的识别,抓举工件的重量是否过载等。
图1 工业机器人的典型结构
工业机器人运动由主构架和手腕完成,主构架具有3个自由度,其运动由两种基本运动组成,即沿着坐标轴的直线移动和绕坐标轴的回转运动。
不同运动的组合,形成各种类型的机器人(如图2):①直角坐标型(如图2a是三个直线坐标轴);②圆柱坐标型(如图2b是两个直线坐标轴和一个回转轴);③球坐标型(如图2c是一个直线坐标轴和两个回转轴);④关节型(如图2d是三个回转轴关节和图2e是三个平面运动关节)。
a)直角坐标型 b)圆柱坐标型 c)球坐标型 d)多关节型 e)平面关节型
图2 工业机器人的基本结构形式。
工业机器人组成结构
工业机器人组成结构工业机器人是一种用于自动化生产的机器,它能够完成人类在生产线上的工作任务。
工业机器人的组成结构是多样的,下面将从机械结构、电气控制和软件系统三个方面来介绍工业机器人的组成结构。
一、机械结构工业机器人的机械结构是支持其运动和操作的基础。
通常,它由底座、臂架、关节、末端执行器等部分组成。
1. 底座:底座是机器人的基础,通常由铸铁或钢板制成,具有足够的强度和稳定性。
底座上通常安装有电机和减速器,用于提供机器人的旋转运动。
2. 臂架:臂架是机器人的主体结构,通常由铝合金或碳纤维等材料制成,具有轻量化和高强度的特点。
臂架上的关节连接着各个运动部件,使机器人能够进行多轴运动。
3. 关节:关节是机器人的运动部件,通常由电动机、减速器和编码器等组成。
关节能够提供机器人的转动和抬升等运动,使机器人能够灵活地完成各种工作任务。
4. 末端执行器:末端执行器是机器人的工作部件,通常根据需要选择不同的执行器,如夹爪、吸盘、焊枪等。
末端执行器能够完成机器人的具体操作任务,如抓取、装配、焊接等。
二、电气控制电气控制是机器人的神经系统,负责控制机器人的运动和操作。
它由电机驱动系统、传感器系统和控制器等组成。
1. 电机驱动系统:电机驱动系统是机器人的动力源,通常由伺服电机和伺服驱动器等组成。
电机驱动系统能够提供机器人的运动能力,使机器人能够精确地控制运动轨迹和速度。
2. 传感器系统:传感器系统能够感知机器人周围的环境和工件信息,通常包括视觉传感器、力传感器、接近开关等。
传感器系统能够为机器人提供反馈信号,使机器人能够根据实际情况进行调整和控制。
3. 控制器:控制器是机器人的大脑,负责整个系统的协调和控制。
控制器通常由工控机或嵌入式控制器组成,可以通过编程来实现机器人的自动化控制和任务规划。
三、软件系统软件系统是机器人的智能核心,负责实现机器人的智能化和自主性。
它由操作系统、控制算法和应用软件等组成。
1. 操作系统:操作系统是机器人的基础软件平台,通常采用实时操作系统(RTOS),如VxWorks、RobotWare等。
工业机器人组成及分类
• 连续轨迹控制这种控制方式不仅要求机器人以一定精度达到目标点 而对运动的轨迹也有一定精度要求。运动轨迹是空间的连续曲线, 机器人在空间的整个运动过程都要控制,比较复杂。这种控制常用 于焊接、喷漆和检测等。
(二)按用途分
1、焊接机器人
2、搬运机器人
手部
手腕
执行 机构
手臂
机座
手部:又称抓取机构或夹持器,用于直接抓取工件或工具。此外,
在手部安装的某些专用工具,如:焊枪、喷枪、电钻、螺钉螺帽拧 緊器等可视为专用的特殊手部。 手腕:手腕是连接手臂和末端执行器的部件,用以调整末端执行 器的方位和姿态。 手臂:手臂是支撑手腕和末端执行器的部件。它由动力关节和连 杆组成。用以承受工件或工具载荷,改变工件或工具的空间位置, 并将它们送至预定的位置。
一、工业机器人的组成
控制系统 驱动系统 感知反馈系统
执行机构
天使之城
(一)控制系统
(1)控制系统的作用 控制系统是工业机器人的指挥中心。他控制工
业机器人按规定的程序动作。控制系统还可存储各 种指令(如动作顺序、运动轨迹、运动速度以及动 作的时间节奏等),同时还向各个执行元件发出指 令。必要时,控制系统汉对自己的行为加以监视, 一旦有越轨的行为,能自己排查出故障发生的原因 并及时发出报警信号。
驱动形式
电气
液压
气动
(三)感知反馈系统
通过速度、位置、触党、视觉等传感器检测机 器人的运动位置、运动速度和工作状态,并随时反 馈给控制系统,并与设定的位置进行比较,然后通 过控制系统进行调整,使执行系统精度达到设定的 位置状态。相当于人的感官和神经
(四)执行机构
相当于人的肢体。一种具有和人手臂相似的动 作功能,可在空间抓放物体就执行其他操作的 机械装置。 通常包括:机座、手臂、手腕和末端执行器(手 部)。
工业机器人的五大机械结构和三大零部件解析
工业机器人的五大机械结构和三大零部件解析一、五大机械结构:1.手臂结构:工业机器人的手臂结构类似于人的手臂,用于搬运和操作物体。
它通常由多段关节构成,这些关节可以进行旋转和伸缩。
手臂结构可以根据不同的任务来设计,手臂的长度、关节的自由度和负载能力等可以根据实际需求进行调整。
2.底座结构:底座结构是工业机器人的支撑部分,它承载整个机器人和工作负载的重量,并提供机器人的旋转能力。
底座通常由电机和减速器组成,通过控制电机的旋转实现整体机器人的转动。
3.关节结构:关节结构是工业机器人手臂各关节连接的部分,它具有旋转和转动的能力。
关节结构通常由电机、减速器和编码器等组成,电机提供动力,减速器提供转动和转动的精度,编码器用于反馈位置和速度等参数。
4.手持器结构:手持器结构是机器人手臂的末端装置,用于夹取和操纵物体。
手持器通常由夹爪、吸盘、焊枪等组成,它们可以根据不同的任务和工作环境进行选择和装配。
5.支撑结构:支撑结构是机器人的框架和支撑部分,它提供机器人的稳定性和强度。
支撑结构通常由铝合金、碳纤维等材料制成,具有轻巧、刚性和耐用等特点。
二、三大零部件:1.电机:电机是工业机器人的核心动力部件,它提供驱动力和旋转力。
根据不同的应用需求,电机可以选择步进电机、直流电机、交流伺服电机等,它们具有不同的功率、转速和扭矩等特性。
2.减速器:减速器是机器人关节结构中的关键部件,它将电机的高速转动转换为低速高扭矩的输出。
减速器能够提供精确的旋转和转动控制,确保机器人的高精度和灵活性。
3.编码器:编码器是机器人关节结构中的传感器部件,它用于测量关节的位置和速度等参数。
编码器通过提供准确的反馈信号,帮助控制系统实时控制和监测机器人的运动状态。
以上是对工业机器人的五大机械结构和三大零部件的解析。
机器人的结构和零部件的选择和设计根据不同的应用和需求来进行,它们共同作用于机器人的性能和功能,实现自动化生产和工作的目标。
随着科技的不断发展,工业机器人在各个领域的应用也将越来越广泛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
..工业机器人由主体、驱动系统和控制系统三个基本部分组成。
主体即机座和执行机构,
包括臂部、腕部和手部,有的机器人还有行走机构。
大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
工业机器人按臂部的运动形式分为四种。
直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。
工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。
点位型只控制执行
机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。
工业机器人按程序输入方式区分有编程输入型和示教输入型两类。
编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制柜。
示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;另一种是由操作者直接领动执行机构,按要求的动作顺序和运动轨迹操演一遍。
在示教过程的同时,工作程序的信息即自动存入程序存储器中在机器人自动工作时,控制系统从程序存储器中检出相应信息,将指令信号传给驱动机构,使执行机构再现示教的各种动作。
示教输入程序的工业机器人称为示教再现型工业机器人。
具有触觉、力觉或简单的视觉的工业机器人,能在较为复杂的环境下工作;如具有识别功能或更进一步增加自适应、自学习功能,即成为智能型工业机器人。
它能按照人给的“宏指令”自选或自编程序去适应环境,并自动完成更为复杂的工作。