深度相机总结
摄影个人总结心得(精选10篇)

摄影个人总结心得(精选10篇)摄影个人总结心得篇1通过一个月来对摄影基础及构图与用光的不断实践、不断学习,我逐步提升了自己的审美观念和处理画面(事物)的方法,这主要表现在以下几个方面。
认识水平略有提高。
学习摄影以来,不断加强了自己对摄影的认识、认识水平,这主要体现在摄影的基础操作、构图与用光的实践练习、学习国内外摄影史。
学习本来就是一个不断认识、不断发现、不断总结的过程,反复地学习和不断的总结会形成良好的学习方法和认识事物的能力。
通过摄影基础课程的学习,我熟悉了相机的一些基本原理和简单的操作;通过构图与用光的专业课程学习,我们在脑海中就形成了一个很好的意识:谨慎构图、合理布光,力求使画面达到完美状态,使事物永远停留在最美丽的一瞬间;还有通过国内外摄影史的学习,我们对摄影的历史和前身有了比较好的认识,也对摄影的未来有着明确的方向性。
这只有在学习中才能体会到的,是一个认识的过程,需要我们用心地学,用心去领悟。
质与量发生着变化。
唯物主义辩正法告诉我们,只有当量达到一定的积累的时候才会有可能引起质的变化。
所以我们要真正的想去认识事物的本质必须要有个量化的过程,这正是我们教学所提倡的,因为这是一个提高认识的必要的途径。
比如在洪江采风学习的两天,我拍了一些照片,在电脑上预览的时候才发现原来那些都有点暴光过度,所以整个画面显得苍白无力,缺少暗色调,一片迷茫的感觉。
虽然我当时是采用的准确的暴光,但对这相机来说还是暴光偏高,这是我没有对本相机的一些性能有个全面的了解,只是按照常规的来,忽略了一些由于相机本身所产生的误差的特性,这是一个很重要的因素;还一个是因为我平时没有过多的尝试,没有去总结在拍摄过程中的出现的问题,也许是当时拍的时候根本没有发现问题,就没有了解决问题的可能。
所以在今后的拍摄当中,我一定要勇于去拍、敢去尝试,并且发现问题之后及时总结出来,把弊端和好的方法也记载下来,以便下次的正确的操作提供一些理论依据,不断地知道自己前进。
基恩士2.5d相机合成原理
基恩士2.5d相机合成原理基恩士2.5d相机合成原理随着计算机技术的发展,图像处理技术也愈发成熟。
其中的相机合成技术也被广泛应用于各种实际场景中。
2.5D相机合成技术通过基恩士相机对场景深度信息的获取和视觉信息的处理来合成一个具有真实感的场景。
本文将介绍基恩士2.5D相机合成原理。
一、2.5D相机合成的概念2.5D相机合成技术是指通过采集不同视角下的2D图像和场景深度信息,利用计算机算法合成一个具有真实感的3D场景。
2.5D相机合成技术广泛应用于虚拟现实、游戏开发、广告设计等领域。
二、基恩士相机的概述基恩士相机属于3D感应相机的一种,可以获取图像深度信息,是2.5D相机合成技术的重要组成部分。
基恩士相机的外形类似于普通的摄像机,但是其内部结构却与普通摄像机截然不同。
基恩士相机采用的是三个摄像头并列排列的方式,这三个摄像头分别是黑白相机、红外激光发射器和红外激光接收器。
三、基恩士相机的工作原理基恩士相机可以通过三角测量原理来获取图像深度信息。
黑白相机获取图像表面的灰度信息,红外激光发射器发射激光,激光照射到场景表面后会产生反射,并被红外激光接收器接收。
三个摄像头采集到的数据会传输到计算机上,经过计算机算法的处理,即可获得场景的深度信息。
基恩士相机可以采集多个角度下的场景图像,这样就可以获取到一个具有立体效果的场景。
四、基恩士相机的应用基恩士相机可以应用于虚拟现实等领域,可以为用户呈现更加真实的场景。
基恩士相机还可以应用于机器人导航和地图制作等领域,可以为机器人提供更加精准的定位信息,也可以制作真实地图。
五、基恩士相机的局限性基恩士相机存在着一些局限性,例如需要提前进行场景测量,测量精度还受到环境的影响。
同时,基恩士相机很容易受到光照等环境条件的影响,容易出现深度信息的误判。
六、总结基恩士2.5D相机合成技术通过基恩士相机的深度信息获取和计算机算法的处理,可以实现真实场景的合成。
该技术具有广泛的应用前景,但还存在局限性,需要进一步完善和提高。
深度相机和激光雷达数据融合的算法实现介绍
深度相机和激光雷达数据融合的算法实现介绍全文共四篇示例,供读者参考第一篇示例:深度相机和激光雷达是两种常见的感知设备,它们在自动驾驶、机器人导航、三维环境重建等领域起着至关重要的作用。
深度相机可以提供准确的RGB-D图像,而激光雷达则可以提供高精度的点云数据。
将这两种传感器的数据融合在一起,可以提高感知系统的鲁棒性和准确性。
本文将介绍深度相机和激光雷达数据融合的算法实现。
一、数据获取与预处理深度相机和激光雷达通常以不同的频率和分辨率采集数据,在进行融合之前,需要将它们的数据对齐和校准。
将深度相机获取的RGB-D图像和激光雷达获取的点云数据转换到同一个坐标系中。
然后,根据两种数据的特点(例如分辨率、精度)对其进行预处理,例如去除噪声、滤波、尺度对齐等操作。
二、数据融合算法数据融合算法主要包括传感器融合和特征融合两种方法。
1. 传感器融合传感器融合是将深度相机和激光雷达的数据直接融合在一起。
常见的方法包括投影和拼接。
投影是将点云数据投影到RGB-D图像上,得到一个混合的点云图像。
拼接是将RGB-D图像和点云数据拼接到一起,得到一个新的混合图像。
传感器融合可以提高数据的完整性和丰富性。
2. 特征融合特征融合是将深度相机和激光雷达的特征数据融合在一起,例如特征点、边缘、平面等。
常见的方法包括特征匹配、特征插值、特征融合等。
特征融合可以提高数据的稳定性和准确性。
三、实现与优化在实际应用中,数据融合算法需要考虑实时性和准确性。
一方面,需要考虑算法的复杂度和计算性能,保证算法能够在实时场景下运行。
需要不断优化算法,提高数据的精度和稳定性。
常见的优化方法包括深度学习、SLAM、稀疏优化等。
总结深度相机和激光雷达数据融合是一项复杂而重要的技术,在自动驾驶、机器人导航等领域有着广泛的应用前景。
通过合理的数据获取、预处理、融合算法、实现与优化,可以更好地利用深度相机和激光雷达的优势,提高感知系统的性能和稳定性。
希望本文对数据融合算法的介绍有所帮助,同时也希望读者能够在实践中不断探索和创新,为深度相机和激光雷达数据融合技术的发展贡献自己的力量。
基于深度相机的三维人体尺寸测量
目录第一章绪论 (1)1.1 选题背景及意义 (1)1.1.1 研究目的 (1)1.1.2 研究意义 (1)1.2 国内外研究现状 (2)1.2.1 国外研究现状 (2)1.2.2 国内研究现状 (2)1.3 研究内容与方法 (4)1.3.1 研究内容 (4)1.3.2 研究方法 (5)第二章三维人体数据获取 (7)2.1 Kinect介绍 (7)2.1.1 Kinect的发展历程 (7)2.1.2 Kinect的应用 (7)2.1.3 用Kinect获取三维人体数据的优势 (8)2.1.4 Kinect二代的测量方法 (9)2.1.5 软硬件环境 (10)2.1.7 设备布局 (11)2.2 摄像机标定 (12)2.3三维人体图像融合 (12)2.4本章小结 (14)第三章三维人体点云模型 (15)3.1 点云介绍 (15)3.2点云的开发环境 (15)3.3 点云的绘制和展示 (15)3.4 相机坐标系变换到世界坐标系 (16)3.5本章小结 (17)第四章三维人体模型分割 (18)4.1 人体分割的意义 (18)4.2 利用人体区间比例进行分割的算法 (18)4.3本章小结 (20)第五章三维人体主要尺寸测量 (21)5.1 测量参数 (22)5.2 维度测量算法 (22)5.2.1 凸包算法 (22)5.2.2 躯干围度 (24)5.2.3 双臂围度 (25)5.2.4 双腿围度 (27)5.3长度测量算法 (29)5.4 本章小结 (29)第六章程序运行及误差分析 (30)6.1 程序运行 (30)6.3 本章小结 (33)第七章总结与展望 (34)7.1 全文总结 (34)7.2 展望 (34)参考文献 (36)谢辞 (38)学位论文独创性声明 (39)学位论文知识产权权属声明 (39)第一章绪论第一章绪论1.1 选题背景及意义1.1.1 研究目的Kinect[1]是微软公司研发的作为体感游戏的周边设备,本项目通过对Kinect进行开发,重点将其实施用于三维人体的测量领域。
摄影心得五百字(通用10篇)

摄影心得五百字(通用10篇)摄影心得五百字篇1我国的摄影室起源于上世纪十年代的国营和个体照相馆。
到21世纪初,影楼已经风靡全国各大中城市。
据相关机构调查统计,我国现有500多万影楼从业人员。
影楼业在我国发展不过十几年,但其产值已超过70亿美元。
摄影业已然成为一个不小的行业。
珠海婚纱摄影市场现有大小影楼近20多家,各大摄影店分别利用各自的优势和特色,专攻婚纱行业,拍摄证件照,同时也都兼做冲印工作。
珠海作为一个经济特区和较大旅游城市,城市人口以外来“移民”为主,所以拍摄婚纱客人比例相对量有限。
在客人消费指数上基本以三种层次化分,高端客人基本以澳门和本地成功人式为主,一般消费在6899~10000元左右较多。
中端客人基本以白领为主的代表人群,一般消费在4299~6899元左右较多。
低端客人基本以企业打工一族和低收入市民为群体,一般消费在2299~3999元左右较多。
珠海人对婚纱照的观念有一定的接受能力,但由于地域风俗,对新鲜事物接受程度相对缓慢,当地影楼整体的拍摄风格相对于广东其它地区的市场略显保守一些,但也不乏有高端及观念前卫的新人。
作为结婚必须的事项,很多的新人还只是停留在拍完了事的心态上。
对于相册与服装、造型及拍摄风格上并无太多要求。
了解影楼基本以口碑宣传及接受广告方式,对品牌的认识度和支持度较高。
一般选择影楼的要求为:拍摄风格、价格、套餐内容、外景、然后是相册相框大小。
整体行业市场保护还算良好。
新人基本套餐接受价格维持在2399~4899之间。
珠海影楼吸引客源的主要方式以“特惠套餐、优惠活动、不定期的外展、各类秀场、网络营销、报刊广告等方式为主。
实践经历刚开始进去工作,了解到影楼是一个流水线作业的行业,门市部、化妆部、摄影部、技术部有条不紊地忙着自己的工作。
门市部负责接待介绍推销约单,然后交给化妆部进行造型设计化妆,接下来等候摄影师拍摄,拍摄完成后至门市部接待员帮助选片,选定后原片交至技术部进行后期处理,最后是出片冲洗制作相册。
orbbecviewer 使用手册
很高兴你选择我作为你的文章写手,我会全力以赴帮助你撰写一篇高质量、深度和广度兼具的中文文章。
你提供的主题是「orbbecviewer 使用手册」,让我来根据这个主题进行全面评估,并据此为你撰写一篇有价值的文章。
我们来深入了解一下「orbbecviewer」。
它是一款专门为Orbbec深度相机设计的软件,旨在帮助用户查看和管理通过Orbbec深度相机获取的数据。
这款软件通常用于三维扫描、人体追踪、手势识别等领域,具有广泛的应用前景。
我们将重点关注如何使用这款软件,以及它的功能和特点。
在文章的开头,我会先从简单的介绍「orbbecviewer」的基本信息开始,包括其所属的公司、产品的定位和版本更新等内容。
我将详细介绍其具体的使用方法,如如何打开软件、导入数据、切换显示模式、调整参数等。
这部分内容会从简到繁,帮助你更深入地理解如何操作这款软件。
在接下来的内容中,我会结合使用示例来具体说明「orbbecviewer」的功能,并介绍一些高级技巧和注意事项,以便你能更全面、深刻地掌握这款软件。
我还会对该软件的优缺点进行分析,可行性和适用范围进行讨论,以便你全面、深刻地理解这个主题。
在总结和回顾性的内容中,我会再次强调「orbbecviewer」的重要性和实用性,总结其主要功能和优势,为你提供一个全面、深刻和灵活地理解这个主题的机会。
我会共享自己对这个主题的个人观点和理解,帮助你更好地把握文章的主旨。
我会按照非Markdown格式的普通文本撰写文章,并遵循知识文章格式,使用序号标注文章的内容,多次提及你指定的主题文字,确保文章中包含你所需的关键信息。
最终的文章字数会超过3000字,不需要出现字数统计。
我会尽最大的努力为你撰写一篇满足你要求的高质量、深度和广度兼具的文章,希望它能给你带来帮助和启发。
如果有任何要补充或修改的地方,欢迎随时告诉我,我会及时进行调整。
让我们一起努力,打造一篇出色的文章吧!对于使用Orbbec深度相机的用户来说,orbbecviewer软件是一个非常重要的工具。
挑战4K视频的极限-松下GH5相机深度评测(全文)
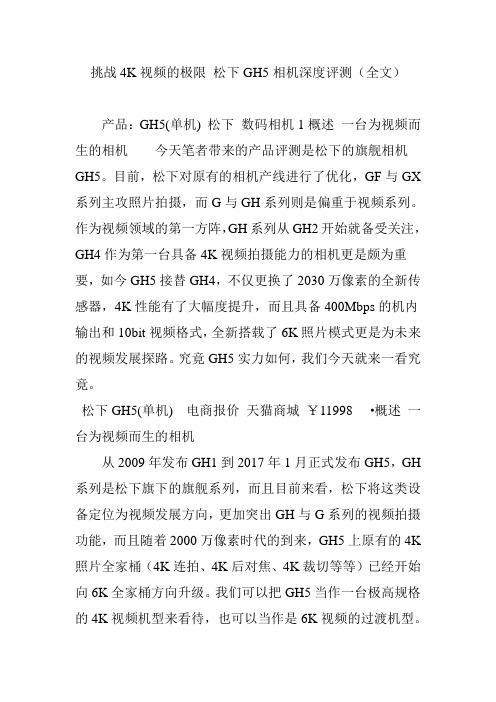
挑战4K视频的极限松下GH5相机深度评测(全文)产品:GH5(单机) 松下数码相机1概述一台为视频而生的相机今天笔者带来的产品评测是松下的旗舰相机GH5。
目前,松下对原有的相机产线进行了优化,GF与GX 系列主攻照片拍摄,而G与GH系列则是偏重于视频系列。
作为视频领域的第一方阵,GH系列从GH2开始就备受关注,GH4作为第一台具备4K视频拍摄能力的相机更是颇为重要,如今GH5接替GH4,不仅更换了2030万像素的全新传感器,4K性能有了大幅度提升,而且具备400Mbps的机内输出和10bit视频格式,全新搭载了6K照片模式更是为未来的视频发展探路。
究竟GH5实力如何,我们今天就来一看究竟。
松下GH5(单机) 电商报价天猫商城¥11998 ·概述一台为视频而生的相机从2009年发布GH1到2017年1月正式发布GH5,GH 系列是松下旗下的旗舰系列,而且目前来看,松下将这类设备定位为视频发展方向,更加突出GH与G系列的视频拍摄功能,而且随着2000万像素时代的到来,GH5上原有的4K 照片全家桶(4K连拍、4K后对焦、4K裁切等等)已经开始向6K全家桶方向升级。
我们可以把GH5当作一台极高规格的4K视频机型来看待,也可以当作是6K视频的过渡机型。
松下GH5相机·画质新传感器提升低感松下GH5的传感器由原有的1600万提升至了2030万像素,而且搭载了最新的机身处理器,具有现在M43系统中最高规格的成像系统。
新传感器在实际使用中画质表现不错,ISO 3200下不管是直出还是RAW文件的噪点控制都比较好,而且长曝下噪点也相对较少。
从低感方面来看,GH5相比于以往机型低感成像更扎实,如今的色彩管理也相对较好,适合风光拍摄,但是原始机身配置下拍人颜色依然有些发黄,通过RAW文件可以完全解决这个问题。
(点击查看相关测试)松下GH5实拍样片100%截图(点击查看相关测试)·性能更强大的追焦判断力和机身防抖GH5的对焦性能非常强大,特别在视频拍摄时对焦有所调整。
线结构光3d相机 算法

线结构光3d相机算法1.引言1.1 概述概述:随着科技的不断进步和人们对于三维视觉信息获取的需求日益增长,线结构光3D相机成为了一种流行的三维测量设备。
这种相机利用投射的结构光和相机接收的图像来获取目标物体的三维形状和纹理信息。
相比于传统的测量方法,线结构光3D相机具有高精度、高速度和非接触等优点,被广泛应用于工业制造、机器人导航、虚拟现实等领域。
本文将重点介绍线结构光3D相机的算法。
在原理介绍部分,将详细阐述线结构光原理的基本概念和工作原理,包括光源的选择、结构光投影模式和相机的成像原理。
在算法描述部分,将重点讨论相机标定、三维重建和纹理映射等关键算法。
通过对这些算法的深入解析,读者将能够更好地理解线结构光3D相机的原理和工作流程。
本文的目的在于帮助读者全面了解线结构光3D相机算法的基本原理和应用。
无论是学术研究还是工程实践,对于这些算法的掌握都至关重要。
通过本文的学习,读者将能够掌握线结构光3D相机的关键算法,进而应用于实际问题中。
接下来的正文部分将详细介绍线结构光3D相机的原理和算法描述,读者将逐步了解到线结构光3D相机是如何利用结构光和相机图像进行三维测量的,从而获得目标物体的三维形状和纹理信息。
最后的结论部分将对本文的内容进行总结,并展望线结构光3D相机在未来的发展方向。
总之,本文将通过对线结构光3D相机的算法进行深入介绍,帮助读者全面了解线结构光3D相机的原理和应用。
无论是对于科研人员还是工程师来说,对于这种三维测量设备的掌握将会对他们的工作产生重要的帮助。
希望本文能够为读者在相关领域的研究和实践提供有价值的参考。
1.2文章结构文章结构是指文章的组织框架和部分标题的选择,它在一定程度上决定了读者对文章内容的理解和把握。
本文将围绕线结构光3D相机算法展开,主要分为引言、正文和结论三个部分。
在引言部分,我们将对整篇文章进行概述,介绍线结构光3D相机的基本原理和算法在三维重建领域的应用。
通过引言,读者可以初步了解文章的主题以及本文的研究目的和意义。
拍摄心得体会范文

拍摄心得体会范文拍摄心得体会摄影的心得体会摄影与园林景观的碰撞2022生活中的美无处不在,摄影作为我们的另一个双眼睛,它的基本属性是记录时间和空间的历史,但在我看来,它更该是一门追求心灵沟通的艺术。
生活中无时无刻都有震撼心灵的瞬间,然而,却又常常被我们习以为常的眼光忽略,更或者即使我们发现了美,我们也无法表达她。
只可意会,不可言传的感觉是多么可惜,此时此刻,摄影就显得那么的重要。
随着时代的发展,拍照越来越成为我们每个人的所喜欢做的事,手机里的各种拍照软件应接不暇,美图软件也是花样百出。
科学技术的发展,各种专业的摄影工具推陈出新。
我们喜欢用这些摄影工具拍摄各种各样的打动我们的心灵的事物,向人们传递内心的感情。
我认为摄影就是这样一门美的艺术,自然的不一定是最美的。
我在还没接触摄影前,曾一度认为自然就是最真实,最具有感染力的,最美的。
随着学习的深入,才认识到并非如此,艺术的存在就是追求超脱生活的更高层次的享受,生活需要更多精彩和不同,就像同一道菜可以上不同的调料,同样的食材使用不同的烹调方法一般,同样的人物同样的景色同样的地点,不同的镜头下却可以折射出不同的色彩,情感,味道。
这可能就是镜头影射的情感吧!镜头的后面有一双怎样的眼睛,有着怎样的思考大脑,有着怎样的技术,有着怎样的情感,就能影射出一幅怎样的画面。
由此可以看出,摄影者的个人内在修养对摄影作品的优劣的影响是最直接的。
作为一名园林设计专业的学生,需要对优美风景的感知更灵敏,通过对眼睛和镜头的双重定格,不仅能能丰富我们的园林素材,增强专业素养,更是能激发我们的创作灵感。
一张好的摄影作品的作用不仅是给自己欣赏,更是重要的是,通过摄影,向人们的传达我们的设计意图,要知道,没有任何文字语言能比得上图片的带给人们的说服力。
拍照最基本的几个方面是,题材的选择,构图,光线的利用,色彩的选择。
用以下20张照片来具体分析:一、拍摄地点:沙县小吃城拍摄说明:拍摄视角选用具有震撼力的一点透视仰拍,这样的视角,能给人带来较强的视觉冲击力,吸引人的视线,留下较为深刻的印象。
学习摄影心得7篇

学习摄影心得7篇(经典版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的经典范文,如工作报告、工作计划、心得体会、汇报材料、条据文书、合同协议、规章制度、教学资料、作文大全、其他范文等等,想了解不同范文格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!Moreover, our store provides various types of classic sample essays, such as work reports, work plans, insights, reporting materials, documentary evidence, contract agreements, rules and regulations, teaching materials, complete essays, and other sample essays. If you would like to learn about different sample formats and writing methods, please pay attention!学习摄影心得7篇通过心得体会的积累,我们体验人生的辉煌,为自己增添更多深度和内涵,整理好内心感受之后,才能将心得体会写得更合理,下面是本店铺为您分享的学习摄影心得7篇,感谢您的参阅。
摄影测量与深度学习

摄影测量与深度学习引言摄影测量和深度学习是当今计算机科学技术领域的两个重要分支。
摄影测量专注于通过图像和视频获取、处理和分析现实世界的三维信息,而深度学习则是一种模仿人脑神经网络的机器学习方法,主要用于处理和分析大规模数据。
近年来,随着技术的不断发展,摄影测量与深度学习相结合的应用越来越广泛,为许多领域带来了创新和突破。
摄影测量摄影测量是一种通过图像和视频来获取和处理现实世界三维信息的方法。
它主要包括摄像机标定、图像获取、图像处理和分析等步骤。
在摄影测量中,我们通常使用高精度的相机和镜头来获取高质量的图像,然后通过专业的软件进行处理和分析。
在实际操作中,摄影测量的步骤如下:1、相机标定:使用已知尺寸和形状的标定板对相机进行标定,以获取相机的内部参数和畸变系数。
2、图像获取:将相机对准被测物体或场景,按照一定的拍摄参数(如角度、曝光等)进行拍摄,以获取所需图像。
3、图像处理:使用专业软件对获取的图像进行处理,如去噪、图像增强、色彩校正等。
4、图像分析:通过软件中的算法对图像进行处理和分析,如特征提取、匹配、三维重建等。
深度学习深度学习是一种模拟人脑神经网络的机器学习方法,其基本原理是通过多层神经网络对数据进行逐层抽象和处理,以实现对复杂数据的分类、识别、理解和预测。
深度学习中常用的算法包括卷积神经网络(CNN)、循环神经网络(RNN)、生成对抗网络(GAN)等。
在摄影测量中,深度学习可以用于处理和分析拍摄的图像和视频,以提取出关键点和区域等信息。
例如,通过深度学习算法对拍摄的建筑图像进行分析,可以提取出建筑物的特征和结构信息,然后利用这些信息进行建筑物的三维重建和模型优化。
此外,深度学习还可以用于目标检测和分类等任务,例如在智能安防领域中对人脸、物体等进行检测和识别。
应用场景摄影测量与深度学习的结合应用可以在许多领域发挥重要作用。
以下是几个典型的应用场景:1、智能安防:在智能安防领域中,摄影测量和深度学习可以相结合,实现高效的人脸、行为、物体等检测和识别。
智能制造实习总结

智能制造实习总结在本次智能制造实习中,我有幸参与了机器视觉系统开发的项目,并深入了解了智能制造技术在工业生产中的应用。
通过实习,我不仅增加了对智能制造领域的了解,还提升了自己的技术能力和实践经验。
以下是我对本次实习的总结和反思。
一、实习背景及项目介绍本次实习项目旨在开发一套基于机器视觉的智能制造解决方案,用于优化生产过程中的质量控制和异常检测。
项目主要包括图像采集设备的选型与部署、数据处理算法的设计与开发以及结果分析与展示。
二、工作内容及成果1. 设备选型与部署在项目开始阶段,我参与了设备的选型与部署工作。
通过仔细研究不同供应商的产品特性和市场反馈,我们最终选择了适合项目需求的相机和光源,并进行了设备的安装和调试。
2. 数据处理算法开发在设备部署完成后,我负责设计和开发图像处理算法,用于对采集到的图像进行质量检测和异常判定。
通过分析样本数据和实际生产场景,我提出了一种基于深度学习的图像分类方法,并使用Python编程语言实现了相关的算法。
3. 结果分析与展示在算法开发阶段,我们采集了大量的样本数据,并对算法进行了训练和优化。
通过与实际生产数据的对比,我们确认了算法的准确性和稳定性。
在最终实验阶段,我负责对实验结果进行统计和分析,并将结果以图表的形式展示。
三、学习收获通过本次实习,我学到了很多有关智能制造领域的知识和技术。
具体而言,我掌握了以下几个方面的内容:1. 机器视觉技术:了解了机器视觉系统的工作原理和应用方法,学会了如何通过图像处理技术实现物体检测、分类和跟踪等功能。
2. 深度学习算法:通过参与图像分类算法的开发,我深入理解了深度学习方法在图像处理中的应用,并掌握了使用主流深度学习框架进行模型训练和调优的技能。
3. 团队协作能力:在实习过程中,我与团队成员紧密合作,共同解决了实际问题。
通过与他人的合作,我学会了如何有效地沟通和协作,提高了自己的团队协作能力。
四、不足和改进尽管本次实习取得了一定的成果,但在实践过程中,我还存在一些不足之处。
深度信息估算像素物理尺寸

深度信息估算像素物理尺寸全文共四篇示例,供读者参考第一篇示例:深度信息估算像素物理尺寸在如今数字化时代的浪潮下,我们离不开电子产品和数字设备。
大部分的设备,包括手机、平板电脑、笔记本电脑、电视机等,都有一个共同的特点,那就是使用了显示器来呈现信息。
而显示器是由许许多多的像素点组成的,在我们面对不同的设备和显示器时,我们不禁会产生一个问题,那就是这些像素点的物理尺寸是多少呢?这个问题的答案对于设计师、开发人员、及普通消费者来说都具有很高的实用价值。
而在这篇文章里,我将为大家介绍如何通过深度信息来估算像素的物理尺寸。
我们需要明确一个概念,那就是像素密度。
像素密度是指显示器或者电子设备每英寸的像素数量,通常以PPI(Pixels Per Inch)来表示。
PPI越高,显示效果就越清晰,因为同样大小的屏幕上,像素点越密集,显示的内容就越细腻。
像素密度只是描述了像素的数量,并不能直接反映出像素的物理尺寸。
为了了解像素的物理尺寸,我们需要考虑显示器的分辨率。
显示器的分辨率是指显示器在横向和纵向上能够显示的像素数量,通常以两个值来描述,比如1920x1080。
这个值告诉我们这个显示器在横向有1920个像素,在纵向有1080个像素。
如果我们将这两个值相除,就可以得到显示器的宽高比。
在这个例子中,1920/1080=1.778,因此这个显示器的宽高比为16:9。
有了分辨率的信息,我们就可以计算出每个像素的物理尺寸了。
我们首先需要知道显示器的对角线长度,这个信息通常可以在设备的说明书或者官方网站上找到。
然后我们可以使用勾股定理来计算每个像素的实际尺寸。
假设一个显示器的分辨率是1920x1080,对角线长度是24英寸,那么我们可以使用勾股定理计算出每个像素的物理尺寸。
勾股定理的公式是:√(1920^2 + 1080^2)= 2202.846,即对角线的长度。
然后我们再将对角线的长度除以像素的数量,就可以得到每个像素的物理尺寸了。
摄影讲座心得(精品5篇)

摄影讲座心得(精品5篇)摄影讲座心得篇1摄影讲座心得这次的摄影讲座,真的是一场视觉与思维的盛宴。
讲座的主讲人,一位资深的摄影师,用他多年的经验,为我们揭示了摄影的奥秘,让我们对摄影有了更深入的理解。
讲座的内容丰富多样,从如何选择相机,到如何拍摄人像,再到如何处理照片,无所不包。
我特别喜欢他讲述如何利用不同角度和光线来拍摄人像的那部分内容,那真是一种艺术,让人仿佛置身于画廊中,欣赏那些美丽的作品。
主讲人的讲述方式也十分吸引人。
他不仅详细解释了各种摄影技巧,还分享了他的摄影历程,让我们看到他如何通过不断地尝试和学习,从一名普通的摄影爱好者成长为今天的资深摄影师。
这让我觉得,摄影不仅需要技术,更需要热爱和坚持。
讲座给我带来的改变是巨大的。
我以前的摄影技术总是不够理想,总是觉得自己的照片缺乏深度和艺术性。
但讲座之后,我有了新的认识,我知道只要用心去拍摄,每个人都可以拍出美丽的照片。
同时,我也明白了后期处理的重要性,通过调整照片的色彩、对比度等,可以让照片更有层次感。
总的来说,这次讲座让我收获颇丰。
我不仅学到了很多实用的摄影技巧,还对摄影有了更深的理解和热爱。
我期待在未来的摄影旅程中,能够用我的相机,记录下更多的美好瞬间。
摄影讲座心得篇2标题:摄影讲座心得体会在过去的几周里,我有幸参加了一次意义非凡的摄影讲座。
这次讲座由当地摄影界的专业人士举办,旨在为对摄影感兴趣的初学者提供基础知识,以及分享他们的摄影经验和技巧。
讲座的主题是“基础摄影技术与实践应用”。
讲座从基础的光线开始,讲述如何正确地设置相机,掌握色彩和构图等高级技能。
主讲人通过详细实例,说明了如何捕捉瞬间,以及如何使用不同技术来制作具有视觉冲击力的作品。
在这次讲座中,我收获颇丰。
我学会了如何更有效地利用相机的曝光补偿,从而在低光环境下也能拍摄出高质量的照片。
同时,我也了解到选择正确的拍摄角度和构图,可以极大地提升照片的表现力。
此外,我也从主讲人分享的摄影经历中获得了许多灵感。
orbbecviewer 使用手册

orbbecviewer 使用手册OrbbecViewer使用手册欢迎使用OrbbecViewer,本手册将为您介绍如何正确使用OrbbecViewer软件,以及它的功能和操作方法。
请按照以下内容逐步进行操作。
第一步:软件安装在您的电脑上安装OrbbecViewer软件。
您可以从Orbbec官方网站下载安装文件,然后按照提示进行安装。
第二步:设备连接将您的Orbbec深度相机连接到电脑上。
请确保电脑已正确安装了相机驱动程序。
连接完成后,打开OrbbecViewer软件。
第三步:界面介绍OrbbecViewer的主界面由以下几个主要部分组成:1. 预览窗口:显示相机捕捉到的实时图像。
2. 控制面板:提供各种功能和设置选项。
3. 菜单栏:包含常用操作和设置选项。
4. 工具栏:提供快捷功能按钮。
第四步:功能操作1. 实时预览在预览窗口中,您可以看到相机捕捉到的实时图像。
可以通过调整控制面板中的设置来实现对图像的调整,例如亮度、对比度等。
2. 录制视频OrbbecViewer还提供了录制视频的功能。
在控制面板中选择录制功能,并设置保存路径和文件名,然后点击开始录制即可开始录制实时图像。
3. 2D/3D测量通过选择控制面板中的测量工具,您可以进行准确的2D和3D测量。
根据提示,在预览窗口上进行标记,软件将自动计算出测量结果。
4. 深度图像处理OrbbecViewer提供了多种深度图像处理功能,例如深度图像滤波、边缘检测等。
您可以根据需要在控制面板中进行设置,并实时查看处理效果。
5. 数据保存和导出您可以将捕捉到的实时图像、测量结果和处理后的图像保存到本地计算机。
在菜单栏中选择保存或导出选项,选择保存路径和文件格式,即可完成保存或导出操作。
第五步:常见问题解答1. 为什么我无法连接到我的Orbbec相机?请确保相机已正确连接到电脑,并安装了相应的驱动程序。
如果问题仍然存在,请尝试重新连接相机或更新驱动程序。
RGBD相机的标定与姿态估计方法研究

RGBD相机的标定与姿态估计方法研究RGBD相机是一种能够同时获取彩色图像和深度信息的设备,因其在计算机视觉领域的广泛应用而备受关注。
在使用RGBD相机进行图像处理前,需要对其进行标定和姿态估计,以确保计算机可以准确地识别和处理得到的图像信息。
在本文中,我们将重点介绍RGBD相机的标定和姿态估计方法。
一、RGBD相机标定方法1. 线性标定线性标定方法适用于已知标定板大小和类型的场景,通过测量标定板上的点与二维图像坐标的关系以及该点在深度图像中的位置,从而计算出相机内参矩阵和外参矩阵。
该方法简单易用,但是对标定板的放置位置和姿态要求较高。
2. 非线性标定非线性标定方法适用于无法完全确定标定板大小和类型的场景,基于最小二乘法对相机内参矩阵和外参矩阵进行估计。
该方法相较于线性标定方法精度更高,但是计算量较大。
3. 双目标定双目标定方法适用于两个RGBD相机之间的标定,通过对两个相机的相对姿态和内参进行估计,从而确定相机之间的关系。
双目标定方法是一种基本的相机标定方法,其适用范围较广,但是对设备和标定板的位置和放置角度要求较高。
二、RGBD相机姿态估计方法1. 相机运动估计相机运动估计方法适用于场景中相机的姿态和位置发生变化的情况。
该方法通过在图像中跟踪同一物体在不同帧中的位置变化,从而计算出相机当前姿态和位置。
常用的相机运动估计方法包括特征点匹配的方法和全局优化的方法。
2. SLAM(同时定位与地图构建)方法SLAM方法是相机姿态估计的高级应用,适用于场景中存在多个物体、光照条件变化等复杂场景。
该方法通过相机自身的运动来确定物体的位置和相对姿态,并且不需要预先对场景进行建模。
SLAM方法是一种复杂的算法,需要大量的计算资源和重复实验对算法进行调优。
三、总结RGBD相机的标定和姿态估计是计算机视觉领域的重要前提和基础,对于实现高效、准确的图像处理和识别有着重要的意义。
在选择标定和姿态估计方法时,需要根据实际场景的具体情况进行综合分析和选择,以实现最优的效果。
尼康D800相机参数及使用技巧心得解析
尼康D800相机参数及使用技巧心得解析很早就想写一篇文章,分享一下d800相机的使用体会,但一直苦于没有时间和精力,更没有全面、系统、成熟的深度体验,所以一直拖延到现在。
关于d 800相机的争论和疑问一直在论坛上频频出现,身为d800相机上市第一批受用者和中关村ZOLd800论坛版主,的确应该静下心来好好整理一下自己对d800相机的心得,哪怕技术性不是很准确,也比网上营销评测更通俗易懂。
很早的时候,在我整理编辑的《d800学习园地》里,已经对d800机器的官方评测和大师们的初步使用评测容纳进去了,但那些评测结果似乎更注重宣传与营销,所以,也只能当做是对d800相机新机型上市“面目”的一个简要的勾画。
后来,有些师友用d800相机拍出作品发到论坛上,有些网友看了以后,随感其画质与网上评测大相径庭,于是,提出了“d800相机出片质量不尽人意“的观点,对此,我结合自己的实践体验,提出了反驳意见,并发表了《d800相机出片质量真的不尽人意吗》帖子,得到很多师友们的认同和支持。
后来,闲来茶馆好友也十分关心,看见我频繁解答网友有关d800相机功能机器使用过程中遇到的问题,占有了大量精力,也善意建议我写一篇通俗易懂的文章,具体谈谈d800相机的一些“热点问题”,免得重复提问重复解答;闪念无极好友也曾经建议我写这样一篇文章,让关注d800相机的师友们能够看到d800版主的使用体会。
近期,“老阿”师友也综合整理了有关d800相机的有关评测和部分使用者的使用总结,非常简明扼要,重点突出。
一篇具有技术含量和具有实际指导意义的使用心得体会,起草以来的确让人费神,因为,官方性能介绍、网上营销评测、个人衡量标准及尺度的不同,很容易带来一种“广告效应与消费欲望”的冲突,让热衷于d800相机的师友们只知道“神器”,而不知道到底“神”在哪些方面?因此,我只有有针对性地针对师友们的提问,再次结合自己进一步的实践,分享自己使用d800相机的真实意见和建议。
名词解释摄影中聚焦的作用

名词解释摄影中聚焦的作用聚焦是摄影中一个非常重要的概念,它是指摄影师通过调整相机镜头使得图像中的某一区域更加清晰锐利,突出主题并吸引观者的目光。
聚焦的作用在于帮助摄影师传达想要表达的信息和情感,同时增加照片的视觉冲击力和观赏性。
本文将探讨聚焦的不同形式以及其在摄影中的应用。
一、焦点深度的控制在摄影中,焦点深度是指在一张照片中清晰的部分范围。
可以通过调整相机镜头的光圈大小来控制焦点深度。
当光圈较小(即光圈值较大)时,焦点深度较大,整个画面中的物体都会清晰可见。
而当光圈较大(即光圈值较小)时,焦点深度较浅,只有少部分物体可以保持清晰。
通过控制焦点深度,摄影师可以选择性地突出某一个特定的主题或细节,起到引导观者视线的作用。
例如,在摄食摄影中,将焦点放在美味的食物上,使其清晰锐利,背景模糊虚化,可以让观者的注意力集中在食物上,增强食欲。
同样,在人像摄影中,通过聚焦在被摄人物的眼睛上,可以突出人物的表情和情感,使得照片更具吸引力和感染力。
二、运动捕捉中的聚焦聚焦在运动捕捉中扮演着关键的角色。
当主题是运动的人或物体时,摄影师需要通过快速对焦来捕捉运动的瞬间。
在这种情况下,连续自动对焦模式(AF-C)可以帮助摄影师实时追踪并保持焦点,以便在适当的时机捕捉到最清晰的瞬间。
这种技术在体育摄影和野生动物摄影中尤为常见,成功的运动摄影作品往往能够准确地记录下动态的力量和速度。
三、聚焦与构图的关系聚焦与构图密切相关,这是因为通过不同的焦点设置,摄影师可以改变图像中的层次感和结构,创造出不同的视觉效果。
例如,选择一个较小的焦点范围并锁定在近景上,可以创造出浓厚的景深效果,将背景、中景和前景结合,使图片更加丰富和多样化。
而通过选择一个广泛的焦点范围,打开光圈,可以使图像的每个部分都保持清晰,创造出整体清晰,明亮的感觉。
四、聚焦和表达情感聚焦在摄影中还可以用来传达情感。
通过选择合适的焦点,摄影师可以通过照片中的某个特定的细节来表达特定的情感。
教师培训拍照技巧心得体会
教师培训拍照技巧心得体会教师培训拍照技巧心得体会导语:现代教学越来越注重多媒体教学,拍照技巧成为每一位教师需要具备的一项技能。
本文作者就自己参加的一次教师拍照培训进行总结和心得体会,分享给大家。
一、背景介绍本次教师拍照培训是由学校组织的一次集中培训活动。
培训的目的是通过系统的理论学习和实践操作,提高教师拍照技巧,使其能够熟练运用相机拍摄教学实践中的照片,丰富教学资源,提高教学效果。
二、理论学习培训的第一部分是理论学习,主要内容包括相机构造、拍照原理、构图技巧等。
1. 相机构造相机是由镜头、曝光系统、取景器、存储介质等部分组成的。
镜头负责聚焦,曝光系统控制光的入射量,取景器用于观察景物,存储介质用于保存拍摄的照片。
2. 拍照原理拍摄一张好照片的原理主要包括三个方面:光线、构图和焦距。
光线是拍照的基础,不同的光线会产生不同的效果。
例如,强烈的阳光会产生明暗分明的照片,而阳光不足的情况下则会产生暗淡的照片。
构图是指照片的组织结构。
合理的构图可以使照片更加生动和有吸引力。
常见的构图技巧包括三分法、对角线法和景深法等。
焦距是指镜头的焦距,它决定了照片的景深和透视效果。
如果使用长焦距镜头,可以在远处拍摄主题,突出主体的同时还可以模糊背景,增加画面的层次感。
3. 构图技巧构图是拍摄一张好照片的重要手段,它可以增加画面的层次感和吸引力。
在构图时,可以运用如下几种常见的构图技巧:(1)三分法:将画面分为上、中、下三个部分,使画面更加平衡。
(2)对角线法:将画面分为两条对角线,以突出主体。
(3)透视法:通过利用透视来增加画面的深度感。
(4)对称法:将画面分为左右对称的部分,使画面更加稳定。
(5)前景放大法:通过在前景中加入小物体,可以突出主题。
(6)对焦点放大法:通过将焦点设置在某个明亮的部分,使画面更加突出。
(7)瞬间定格法:通过捕捉瞬间的动作或表情,增加照片的生动性。
三、实践操作培训的第二部分是实践操作,每个教师都有机会亲自操作相机进行拍摄并进行评比。