盾构及掘进流程虚拟现实系统开发
盾构隧道智能仿真及安全掘进关键技术与应用

盾构隧道智能仿真及安全掘进关键技术与应用【导语】盾构隧道工程是一项重要的基础设施建设工程,而隧道的施工过程中安全无疑是最核心的关键。
盾构隧道智能仿真及安全掘进关键技术与应用,正是为了保障隧道施工过程中的安全而进行的一项重要技术研究。
本文将围绕这一主题展开深入探讨,从多个层面解析盾构隧道智能仿真及安全掘进的关键技术与应用。
【1. 盾构隧道施工的挑战】盾构隧道施工涉及地质条件复杂、地下管线众多、施工环境恶劣等诸多挑战,这些挑战使得隧道施工过程中安全风险巨大。
智能仿真技术的引入,可以在一定程度上帮助工程师和施工人员预测风险并采取相应的措施,保障隧道施工的安全进行。
【2. 盾构隧道智能仿真技术】盾构隧道智能仿真技术是指利用计算机仿真技术对盾构隧道施工过程中的各种参数和变量进行模拟和分析,从而为实际施工提供指导和支持。
这项技术涉及到地质勘探、隧道设计、施工计划、机械调试等多个方面,具有非常广泛的应用前景。
【3. 盾构隧道安全掘进技术】安全掘进是盾构隧道施工过程中的一个核心环节,而安全掘进技术包括地质预测、压力监测、失稳预警、紧急救援等多方面内容。
通过智能仿真技术,可以对隧道掘进过程进行模拟,及时发现潜在危险并采取相应措施,从而最大限度地降低施工风险。
【4. 盾构隧道智能仿真及安全掘进的应用】盾构隧道智能仿真及安全掘进技术在实际工程中已经得到了广泛的应用,例如xx隧道工程、xx隧道工程等。
这些工程的成功案例证明了盾构隧道智能仿真及安全掘进技术的实用性和有效性,为这项技术的进一步推广和完善打下了良好的基础。
【5. 个人观点与总结】盾构隧道智能仿真及安全掘进技术对于隧道施工的安全至关重要。
在未来,随着工程技术的不断进步和智能化水平的提升,相信这项技术将会在盾构隧道工程中发挥越来越重要的作用,为隧道施工的安全保驾护航。
【结语】本文对盾构隧道智能仿真及安全掘进关键技术与应用进行了全面的探讨,并在深度和广度上对这一主题进行了详细的分析。
全断面岩石隧道掘进机主推进系统虚拟仿真平台的开发

ScienceandEducationForum 科教论坛Cutting Edge Education 教育前沿 349全断面岩石隧道掘进机主推进系统虚拟仿真平台的开发文/张良贵 任少蒙摘要:在诸多隧道掘进机类型当中,全断面岩石隧道掘进机的安全性与可靠性要更高一些,但是,因为全断面岩石隧道掘进机的工作环境异常严峻,操作人员一旦出现失误便很有可能会影响到整个项目的顺利推进,更严重的是其会对相关作业人员的生命安全产生直接威胁。
近些年,伴随着全断面岩石隧道掘进机在功能和结构等方面的不断创新与改进,作业人员的不熟练操作和维修失当等导致了多起掘进作业安全事故。
为降低安全事故的发生概率,开发全断面岩石隧道掘进机主推进系统虚拟仿真平台至关重要。
本文将就其平台的开发进行深入的分析和探究。
关键词:全断面岩石隧道掘进机;主推进系统;虚拟仿真平台结合全断面岩石隧道掘进机的应用现状以及虚拟现实技术的发展成果,再根据隧道掘进机进行掘进作业的主要方法与安全操作流程,建立符合多方需求组的主推进系统虚拟仿真平台,建立3D 模型,将3D 模型作为虚拟研究对象,替代实际设备预先进行作业。
通过发现和解决虚拟仿真平台上的问题来进一步调整属性级别设置、细节参数设置以及相关动作设置等,以此来改进全断面岩石隧道掘进机的整体质量,提高其操作的安全性与可靠性。
1 全断面隧道掘进机在我国,关于全断面隧道掘进机有两种提法,第一种是岩石掘进机,又被称为TBM,第二种是盾构机。
TBM 便是文章所要阐述的全断面岩石隧道掘进机,这种掘进机适用于硬岩地质环境,其在稳定性良好、中高强度、中厚埋深的岩层当中掘进长大隧道。
全断面岩石隧道掘进机目前面临的基础问题之一便是如何安全高效地破岩,进而保持掘进的高效率和工程的顺利性。
2 关于全断面岩石隧道掘进机主推进系统虚拟仿真平台的开发2.1 本次全断面岩石隧道掘进机主推进系统虚拟仿真平台研发的创新点第一,运用虚拟现实基础来开发全断面岩石隧道掘进机主推进系统虚拟仿真平台,解决其不适合进行实物研究、教学以及培训等弊端问题,进一步拓宽了掘进机主推进系统虚拟仿真平台的应用范围,提升了平台应用价值。
盾构掘进工艺流程

盾构机掘进工艺流程—管片就位
遥控器
管片小吊 车开关
电机
抓举器
①、抓举器降落 ④、小吊车后退
器
管片小吊车
开关
充电启动遥控
盾构机掘进工艺流程—管片就位
管片小吊车电源
开关位于1#拖车MDB第四个柜子
盾构机掘进工艺流程—管片就位
①、管片输送操作电源 ②、急停开关 ③、指示灯检测 ④、45KW电机开关 ⑤、三色灯指示故障 ⑥、三色灯指示正常 ⑦⑧、管片举升、下降 ⑨⑩、管片输送油缸伸缩
U2:T3→T1→T4 →T2 →T5→T6 U4:T4→T3→T1 →T2 →T5→T6
U5、U6:T5→T2→T1 →T3 →T4→T6
U7:T2→T5→T1 →T3 →T4→T6 U8:T1→T2 →T3 →T5 →T4 →T6
盾构机掘进工艺流程—管片拼装
其中: T1、T2、T3为标准块; T4、T5为相邻快; T6为楔形块
管片拼装
解
管路接续
接续
是
风筒接续
否
轨道接续
盾构机掘进工艺流程—隧道运输
泥水循环
盾
砂浆搅拌
构
掘
设备检查
进
同步注浆
、
管片粘贴
过
盾构掘进
程
管片就位
隧道运输
分
管片拼装
解
管路接续
接续
是
风筒接续
否
轨道接续
盾构机掘进工艺流程—隧道运输
★隧道运输过程
①、联系砂浆搅拌准备好砂浆确保掘进时砂浆能够及时注入; ②、联系地面准备好拼装所需要的管片; ③、联系地面准备好管片料; ④、进入隧道时询问地面是否有需要带入的物品; ⑤、进入隧道前检查电瓶车各个刹车是否完好; ⑥、进入隧道控制好车速,时刻关注轨道是否有人、鸣号; ⑦、上折轨时减速慢行,防止脱轨; ⑧、为满足注浆要求,第一次进入隧道时应准备2.5m³砂浆和管片; ⑨、第二次进入隧道时准备1m³砂浆,保证砂浆注入量为3m³; ⑩、联系盾构司机何时续接管路、风筒及轨道,以便随时备料; !、离开隧道时同样询问是否有需要带出的物品。
隧道挖装机工作装置的虚拟样机技术分析的开题报告

隧道挖装机工作装置的虚拟样机技术分析的开题报告一、选题背景隧道挖装机是一种用来开挖地面下隧道的机械设备。
由于隧道挖装机的设计复杂,而且操作人员的技能水平影响着隧道挖装机的开挖效率,因此对隧道挖装机的设计和操作进行优化是非常重要的。
虚拟样机技术是近年来发展起来的一种先进的工程技术,它通过将真实的设备和系统转换为计算机模型,能够模拟真实环境下的运行情况。
因此,将虚拟样机技术应用于隧道挖装机的设计和操作优化中具有广阔的应用前景。
二、选题意义1.提高隧道挖装机的设计精度:通过应用虚拟样机技术,可以将真实的隧道挖装机转换为计算机模型,在计算机上进行各种模拟试验,从而得到更加精确的设计参数和运动数据,提高隧道挖装机的设计精度。
2.提高隧道挖装机的开挖效率:通过应用虚拟样机技术,可以进行各种场景模拟,分析不同场景下运行参数和锻炼水平的关系,从而优化隧道挖装机操作的流程和技巧,提高开挖效率。
3.减少隧道挖装机操作员的风险:通过应用虚拟样机技术,可以让操作员在计算机上进行各种模拟运行试验,从而减少操作人员的风险,减少设备损坏和人员伤亡事件的发生。
三、研究内容本项目主要研究隧道挖装机工作装置的虚拟样机技术,包括以下研究内容:1.对隧道挖装机工作装置进行建模:通过采集隧道挖装机的各种数据和参数,并进行数字化处理,建立隧道挖装机的模型,为后续模拟试验提供数据支持。
2.开发虚拟样机模拟软件:基于建立的隧道挖装机模型,开发虚拟样机模拟软件,在计算机中进行各种模拟试验和分析。
3.优化隧道挖装机操作:通过模拟不同场景下的运行参数和锻炼水平,分析不同场景下的操作流程和技巧,优化隧道挖装机的操作流程。
4.安全性分析:通过模拟各种运行场景,分析隧道挖装机的安全性,制定相应的安全规范和标准,保障操作人员的安全。
四、研究方法1.建模:通过采集隧道挖装机的各种数据和参数,并进行数字化处理,建立隧道挖装机的模型。
2.软件开发:基于建立的隧道挖装机模型,开发虚拟样机模拟软件。
盾构施工虚拟仿真三维模型建模方法

盾构施工虚拟仿真三维模型建模方法摘要:近年来,随着城市地下交通的快速发展,盾构施工技术得到了广泛的应用。
为了解决施工步骤展示和传统实验教学环节存在的不足,提出利用盾构施工仿真三维模型模拟施工场景。
该文主要介绍了运用3ds max和sketchup软件绘制三维模型的流程和技巧,以及在3ds max软件中精确制作盾构机掘进动画的方法。
关键词:3ds max;盾构机;sketchup;三维建模;虚拟现实中图分类号:tp391.9 文献标识码:a 文章编号:1009-3044(2013)11-2674-04近年来随着城市规模的快速发展,城市交通越发需要改善,地下交通作为一种新兴的交通方式越来越受到人们的欢迎。
伴随着地下交通工程的修建,众多地下施工方法被采纳运用,在这其中,盾构法施工无疑是是较为安全和成熟的一种施工方法。
但由于对土体变形和扰动要求严格,技术要求复杂,仅依靠文字和图纸难以了解盾构施工过程。
建立盾构施工仿真三维模型系统模拟施工环境,作为学习和教学的一种新途径,可以达到更加理想的效果。
该文主要介绍三维模型系统建立的过程和方法。
1 三维模型的绘制本系统以杭州地铁为资料依据,运用3ds max、sketchup软件以及相关插件,将盾构机在地下施工方式用动画的形式表现出来,其具体制作流程为:1.1盾构机的绘制1.1.1软件选取3ds max软件作为目前应用最为广泛的三维软件,其功能十分强大。
在本系统的建立过程中我们将用到它的两大优点:1)3ds max 营造的三维空间非常符合人们的视觉心理,用户可以很自然地将3ds max所营造的虚拟场景与现实生活场景联系起来,增加系统的真实性。
2)具有快速制作动画的能力。
工具栏中的曲线编辑器、约束路径编辑器以及摄影表等功能都可以帮助我们高效、准确的创作动画[1]。
1.1.2模型分解盾构机是一个独立的工作系统,结构复杂,若作为一个整体直接建模将十分繁琐,因此需要对它进行功能模块分解。
煤矿综掘虚拟平台技术的实践应用

煤矿综掘虚拟平台技术的实践应用虚拟现实是通过计算机三维成像技术构建虚拟空间,让学员在视觉上产生一种沉醉于真实环境的感觉,在地面即可体验井下的生产环境,通过与计算机终端的交互作用,实现各工作面上不同设备的操作学习,使学员熟识井下工作环境的同时,对煤矿各机械设备间的协作、工作流程、操作标准及操作程序有更立体、更直观、更生动的体验。
2技术现状虚拟现实技术又称VR技术(Virtual Reality Technique),是多媒体技术进展的更高境地。
VR技术是把计算机从擅长处理数字化的单维信息转变为擅长处理人所能感受到的、在思维过程中所接触到的、除了数字化信息之外的其他各种表现形式的、多维化的信息空间,是定性和定量相结合、感性熟悉和理性熟悉相结合的综合集成环境,给人们逼真的体验,为人们探究宏观世界和微观世界中不便于直接观看的事物供应了极大的便利。
VR作为一门新兴的技术,其应用己从嬉戏机和主题游乐园扩展到了教育培训、工业、商业、医学和军事等多个领域。
3国内外进展趋势虚拟交互培训技术仅在美国、澳大利亚等采煤设备先进的国家得到了应用,目前在国内的煤矿机械设备操作培训中,该技术还是空白。
随着煤炭开采难度的增加、国家对安全重视程度的增加及煤炭工业与国际的进一步接轨,采煤设备操作虚拟模拟培训为实现安全培训、节能低碳培训、降低实训中事故隐患发生率、降低培训本钱、提高职工队伍专业技能、指导一线生产工作、实现培训与工作的无缝链接供应了便利的解决方案,该培训模式将会以优异的性能在我国采煤设备培训中发挥巨大的作用。
4主要关键技术1)矿井各生产系统环境及设备模型的建立。
虚拟综合机械化采煤工作面要到达精细化的程度,完全要参照实际设备建立模型。
各机械设备间协作工作状态,运作流程等都据实表现,多角度查看。
机械作业时对外围环境的影响要生动表达,协作现场音效和采光效果营造出一个高精度仿真的作业面,给人以身临其境的感觉。
2)实现操作人员对虚拟设备的互动掌握。
盾构掘进施工工艺流程【图】
盾构掘进施工工艺流程本标段共包含2个盾构区间段,由西向东分别是双林站~李楼站~洪泥河站。
具体如下:双林站~李楼站区间隧道采用3台土压平衡盾构推进,其中双林站敞开段~区间风井区间1#盾构机拟由双林站敞开段始发,推进至区间风井接收,盾构机再转场至双林站敞开段,继续掘进至区间风井接收后结束施工;区间风井~李楼站区间2#、3#盾构机拟由李楼站始发,推进至区间风井。
李楼站~洪泥河站区间隧道采用2台土压平衡盾构机由李楼站开始推进(3#盾构机、4#盾构机),推进至洪泥河站。
具体单个区间施工见图:盾构施工工艺流程图。
图程流艺工工施构盾1.4.1 准备工作1.4.1.1 技术交底、岗位培训在盾构施工前,对参加施工的全体人员按阶段进行详细的技术交底,按工种进行岗位培训,考核合格后方可上岗操作。
1.4.1.2 地面准备工作1)在盾构推进施工前,按常规进行施工用电、用水、通风、排水、照明等设施的安装工作,特别是盾构机的高压电路的布设。
2)施工必需材料、设备、机具备齐,以满足本阶段施工要求,管片、连接件等准备有足够的余量。
3)井上、井下建立盾构测量控制网,并经复核、认可。
4)车架安置到位,电缆、管路等接至井下。
1.4.1.3 井下准备工作1)盾构基座就位盾构基座为钢结构预制成榀,盾构基座位置按设计轴线准确放样,安装时按照测量放样的基线,吊入井下就位焊接。
两根轨道中心线与基座上的盾构必须对准洞门中心且与隧道设计轴线反向延长线基本一致,并对基座加设支撑加固。
详见盾构基座(发射架)图。
2)盾构吊装就位、调试验收根据现场情况,采用吊车将盾构机本体分块吊入井下,在盾构基座上正确就位、组装,然后将盾构与车架之间的电缆、油管等连接,最后由专业技术人员调试验收。
3)盾构后靠制作钢后靠采用双榀70#H钢制作,并采用 609钢管斜撑进行支撑。
在盾构推进时,应注意观察后靠的变形,防止位移量过大而造成破坏。
在后靠设置变形观测点,开始时每推进一箱土测量一次,待后靠变形较稳定时每环测量一次,直至后靠稳定(约7环)后方可停止观测。
盾构常规掘进
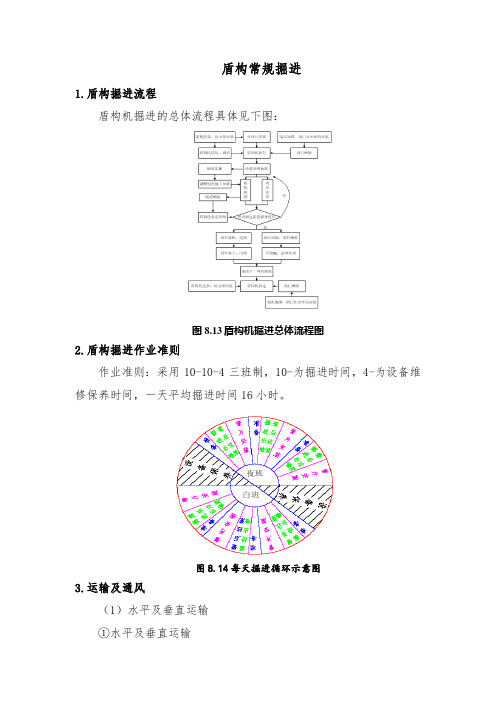
盾构常规掘进1.盾构掘进流程盾构机掘进的总体流程具体见下图:图8.13盾构机掘进总体流程图2.盾构掘进作业准则作业准则:采用10-10-4三班制,10-为掘进时间,4-为设备维修保养时间,一天平均掘进时间16小时。
图8.14每天掘进循环示意图3.运输及通风(1)水平及垂直运输①水平及垂直运输本工程采用双编组列车单线运输方式,洞口车站处设“Y”型道岔。
隧道内采用45t电瓶车为牵引动力的轨道运输系统,每台电瓶车牵引8节拖车,主要运输管片.注浆液.碴土及其它材料。
隧道碴土装入土斗后,由电瓶车拉至车站预留出碴口,再由地面45t龙门吊机提升至地面倒入碴土池内。
两台45t龙门吊主要用于碴土吊装,16t龙门吊主要用于管片及其它材料的吊装。
浆液由搅拌站拌制,浆液先由地面泵送到浆液运输车内,由运输车转至拖车上的储浆罐内使用。
②隧道内运输轨道系统布置洞内运输采用有轨运输。
铺设43kg/m单线轨道,钢轨中心距均为900mm。
轨枕采用自制弧形轨枕,轨枕间距为 1.0m,用压板螺栓固定钢轨,轨枕间用Φ10钢筋牵牢。
为方便钢轨从作业井吊入和驳接,单根钢轨长 6.25m。
轨枕和钢轨的连接扣件采用螺栓扣板扣件。
③运输设备的配置A.列车编组隧道每环掘进的土石方量按46m3计,碴土松散系数1.5,每环同步注浆量:6m3计。
列车编组原则:每编组5个碴土车,1个浆液车,2个管片车。
根据施工经验和工序循环时间,此编组能满足运输能力的要求。
如下图所示:图8.15电瓶车编组示意图B.垂直运输设备配置垂直运输系统主要考虑管片.碴土.轨枕.轨道等材料的吊下及吊出。
在盾构始发井内,沿隧道左右线各预留一个管片吊装井,在出土口位置平行隧道掘进方向布置2台45t的龙门吊,主要用于碴土.管片及其他材料的吊装作业。
在盾构井端头位置安装一台16t的龙门吊,专门用于管片和小材料的吊装以及到场管片的卸车作业。
每次吊重比较:一箱碴土为8t+32t=41t,小于40t,经验算选用45t龙门吊足以保障区间施工吊装需要。
综掘工作面虚拟仿真实操系统

2014新版煤矿综掘工作面虚拟仿真实操系统技术参数WM-ZJ煤矿综掘工作面虚拟仿真实操系统1.产品简介煤矿机械设备操作培训,当前主要依靠口头传授和老技工传带。
理论培训脱离井下环境,内容较为抽象,培训效果较差。
老技术工人的传帮带方式,存在安全隐患,特别是综掘设备误操作甚至会带来严重的安全事故,另外该学习方法效率不高且影响正常的采掘作业。
开发掘进机系统实训操作台,通过计算机控制等技术,再现井下设备操作环境,配合掘进机操作台、液晶显示屏、计算机、单片机等硬件对相关设备工作原理、动作进行仿真,将井下设备搬到实验室,从根本上改变煤矿设备操作的培训模式。
2.产品特点(1) 培训手段新颖,直观性强,效果良好。
采用3D仿真技术,模拟真实操作环境,实现人机交互操作,对综掘系统的操作技术要求、工作原理、故障处理等,都能在模拟的三维环境下,实现掘进机司机、皮带工、风机工,以及安检工等进行协同模拟操作。
该系统采用先进的虚拟现实技术、3D动画、人机交互等先进技术,培训手段新颖,直观性强,能达到良好的培训效果。
(2) 培训成本较低,安全可靠,内容丰富。
该综掘系统虚拟实训操作台为一次性投入,在长期的综掘系统培训中可以重复使用,培训内容可以无限丰富,也可以根据具体矿井情况进行修改,相比部分矿井建立“实训基地”的方式来说投入较低。
另外,培训环境采用计算机仿真技术再现,具备很强的临场感,相对于“传帮带”方式则显得更加安全可靠。
(3)能够实现多工种协同操作。
本操作台通过主控计算机,能够实现掘进机司机、皮带工、风机工,以及安检工等进行协同模拟操作,这比各个工种单独通过理论、现场操作等培训方式更加直接,效果更加良好。
(4) 有利于缩短培训周期,更有利于提高培训合格率。
该操作台可以根据矿上的具体情况,可以定制开发,也不存在安全隐患,培训方式更加先进,受训人员兴趣更高,效果良好,能够使培训的周期明显缩短,培训合格率也能得到提高。
(5) 培训内容更加丰富,有利于煤矿安全生产与事故隐患处理的统一协调。
盾构掘进工艺流程

目 录
• 引言 • 盾构机的基本构成 • 盾构掘进工艺流程 • 盾构掘进过程中的风险与控制 • 盾构掘进技术的发展趋势
01 引言
盾构掘进工艺简介
01
盾构掘进工艺是一种广泛应用于 隧道施工的先进技术,通过盾构 机在地层中挖掘隧道,并完成隧 道衬砌、排水、通风等工作。
02
盾构机由刀盘、护盾、推进系统 、排土系统、衬砌拼装系统等组 成,具有挖掘速度快、对地层扰 动小、安全可靠等优点。
刀盘的开口率也是影响盾构机掘进效 率的重要因素,开口率越大,切削的 土量就越多,掘进效率也就越高。
刀盘上装有不同类型的刀具,如切刀、 刮刀、先行刀等,根据不同的地质条 件选用不同的刀具,以保证盾构机掘 进的效率和安全性。
推进系统
推进系统是盾构机的重要组成部分,主要作用是将盾构机向前推进,使切削下来的 土层被推出隧道。
05 盾构掘进技术的发展趋势
智能化盾构掘进技术
总结词
智能化盾构掘进技术是未来发展的主要趋势 ,通过引入自动化、人工智能等技术,提高 盾构机的掘进效率、精度和安全性。
详细描述
智能化盾构掘进技术利用传感器、机器视觉 、人工智能等技术手段,实现掘进过程中的 自动控制、智能监测和故障诊断。通过实时 获取地质信息、设备状态等数据,自动调整 掘进参数,提高掘进精度和效率。同时,智 能化盾构掘进技术还可以降低人工操作的误
泛应用也推动了相关产业链的发展,促进了工程建设的产业升级。
复杂地质盾构掘进技术
要点一
总结词
随着地下工程建设的不断深入,复杂地质条件下的盾构掘 进技术成为研究的热点和难点。
要点二
详细描述
复杂地质盾构掘进技术需要解决在软硬不均、富水、岩溶 等复杂地质条件下盾构机的适应性和稳定性问题。通过加 强地质勘察、优化盾构机设计、采用适当的掘进参数等措 施,可以有效提高盾构机在复杂地质条件下的掘进效率和 安全性。同时,针对不同的复杂地质条件,还需要开展专 项研究和试验,不断探索和创新适合的施工方法和技术手 段。
集成实时掘进数据的盾构隧道施工管理虚拟现实系统

集成实时掘进数据的盾构隧道施工管理虚拟现实系统瞿浩1,李海宝2,周应华1(1.中铁二局集团勘测设计院有限责任公司,四川成都610031;2.中国中铁隧道股份有限公司,河南郑州450001)摘要:盾构法在城市地下空间开发施工过程中得到广泛应用,但是存在施工技术人员经验不足、地质环境复杂、施工过程数据量大等问题。
针对这些难点,结合Unity3D三维引擎研发虚拟现实系统,通过全景模型搭建、监控数据集成、工程数据库设计、掘进过程分析和虚拟现实系统研发,全面展示盾构掘进地面地质情况和实时设备数据,实现盾构掘进可视化、过程信息实时共享、施工风险预警预报和工程数据分析借鉴等功能,辅助施工管理与决策,保障施工质量和安全。
关键词:VR技术;BIM;盾构施工;数据集成;隧道施工;掘进数据中图分类号:U215文献标识码:A文章编号:1672-061X(2020)01-0026-07 DOI:10.19550/j.issn.1672-061x.2020.01.0260引言近年来,盾构法以其高效、快速、安全等特点,在城市地下空间开发施工过程中得到广泛应用[1],但面对日益繁重的工程建设任务及复杂多变的工程施工风险,由于施工技术人员经验不足、地质环境复杂、施工过程数据量大等主客观因素的存在,盾构隧道施工中还存在着诸如信息沟通不及时、人机物调配不合理、管理制度不完善等问题[2]。
因此,应用先进信息化技术,探索研发科学、有效的盾构施工安全、质量监控管理手段与方法,已成为地铁隧道工程建设日常管理工作的当务之急。
目前,盾构法施工监控的管理主要针对盾构机传输数据的分析和应用。
周文波等[3]介绍了一种盾构隧道信息化施工智能管理系统,并对系统数据库的建立、数据传输的实现、数据的发布、施工数据的分析方法进行了详细介绍;项贻强等[4]对盾构设备施工远程监控系统的构建进行介绍。
目前盾构监控系统多以B/S构基金项目:中铁二局工程有限公司2018年科技开发项目(2018-重点-9)第一作者:瞿浩(1990—),男,工程师。
隧道掘进机虚拟仿真系统设计及实训模式研究
隧道掘进机虚拟仿真系统设计及实训模式研究于洋;吴磊;梁化强【摘要】基于3ds Max软件构建了隧道掘进机的驱动及各类零部件模型,并以Unity3D软件作为驱动引擎,借助于C语言编程实现了良好的人机交互.研发了隧道掘进机虚拟仿真系统,将该系统应用于地下工程施工课程的实践教学环节,改变了传统的单一实训模式,丰富了实训教学手段,改善了实训效果,提升了学生的专业技能和素养.【期刊名称】《实验技术与管理》【年(卷),期】2018(035)011【总页数】4页(P141-143,148)【关键词】隧道掘进机;虚拟仿真;实训教学模式【作者】于洋;吴磊;梁化强【作者单位】徐州工程学院土木工程学院 ,江苏徐州 221018;徐州恩硕软件科技有限公司 ,江苏徐州 221008;徐州工程学院土木工程学院 ,江苏徐州 221018【正文语种】中文【中图分类】U455.31;TP391.9隧道掘进机(TBM)是机械化、自动化程度高,应用最广泛的大型地下工程施工设备,部分断面悬臂式掘进机被广泛应用于矿山巷道和城市地下空间工程等领域[1-6]。
由于设备结构复杂,如果操作或维护不当,会导致掘进作业事故。
在高校,地下工程专业学生的实习实训需求不断增加,传统的“书本教学+现场操作培训”实习实训模式的局限性日益凸显。
现有的培训手段和教学模式很难满足现场操作人员的培训和地下工程专业学生的实习需求。
鉴于此,将虚拟现实和仿真技术与部分断面悬臂式掘进装配和施工工艺相结合,研发了隧道掘进机虚拟仿真系统,实现高效、低成本的仿真培训和教学,强化了学生实践操作能力,提高了实践教学效果。
1 隧道掘进机虚拟仿真系统设计基于隧道掘进机的基本原理和虚拟现实技术的热点[7-8],提出隧道掘进机虚拟仿真系统设计架构结构。
(1) 根据隧道掘进机设计图纸资料,采用3ds Max等三维软件构建掘进机零部件模型,包括截割部、铲板部、行走部、驱动装置等,并进行动画设计,仿真悬臂式掘进机的各种掘进施工工艺和动作。
盾构及掘进流程虚拟现实系统开发
盾构及掘进流程虚拟现实系统开发
, 2 , 2 , 2 韩伟锋1 ,李凤远1 ,陈启伟1
( 1 . 盾构及掘进技术国家重点实验室,郑州 4 5 0 0 0 1 ; 2 . 中铁隧道集团有限公司,河南 洛阳 4 7 1 0 0 9 )
摘要:为进行盾构施工研究和降低盾构掘进现场培训给盾构施工相关人员带来的风险, 采用数字样机结合虚拟现实技术以拓展传 统的虚拟样机的概念, 功能上具备虚拟装配、 运动仿真、 工作过程及各种标矢量场可视化的仿真能力, 实现了盾构设备及施工场景 的虚拟样机实例研究和实验室盾构操作、 维护等培训。 关键词:盾构;虚拟现实;建模;软件开发;漫游;人机交互 D O I :1 0 . 3 9 7 3 / j . i s s n . 1 6 7 2- 7 4 1 X . 2 0 1 2 . 0 4 . 0 3 0 中图分类号:U4 5 9 . 9 文献标志码:A 文章编号: 1 6 7 2- 7 4 1 X ( 2 0 1 2 ) 0 4- 0 5 9 8- 0 6
第 4期 韩伟锋,等 : 盾构及掘进流程虚拟现实系统开发
5 - 1 0 ] 是与大型机械装备相关的工业生产与制造 [ 。盾
5 9 9
构掘进虚拟现实系统不仅关系到建筑仿真, 更多的是 机械产品的仿真, 它不仅能更进一步地发展我国虚拟 现实系统在工业施工领域的应用, 而且也将使虚拟现 实技术在机械装备领域的应用更加成熟。 结合我国目前计算机虚拟现实技术的发展水平和 盾构施工行业的特殊性, 采用虚拟现实技术在实验室 内培训盾构主司机以及各种盾构保养、 维护人员可以 起到事半功倍的效果。在施工现场由于各种设备都在 正常使用状态, 加之新进人员对盾构的了解比较少, 如 果让新进人员在现场进行学习, 不仅会影响工程施工, 而且也会给学习人员带来危险; 因此, 采用虚拟现实技 术可使新进人员不用到施工现场就可以亲身体验到施 工现场的各种状况, 同时也可以通过虚拟现实系统控 制设备, 练习盾构的操作, 熟悉盾构的主要零部件等。
基于虚拟现实技术的盾构隧道施工系统的制作流程

本技术公开了一种基于虚拟现实技术的盾构隧道施工系统,包括数据收集系统、数据传输系统、数据存储系统、数据处理系统、数据控制系统以及数据输出系统;数据收集系统根据盾构隧道施工现场进行布置并在数据控制系统控制下进行数据收集,收集到的数据通过数据传输系统传输到数据存储系统,数据处理系统在数据控制系统的控制下,从数据存储系统中读取数据进行数据处理,处理完成的数据通过数据传输系统存储在数据存储系统中,用户通过数据输出系统访问数据存储系统中的数据;数据输出系统包括VR设备,用户通过VR设备获取信息。
用户可在本系统环境下开展实际施工仿真培训、施工现场安全培训、施工现场管理、施工远程监控及管理等项目。
权利要求书1.一种基于虚拟现实技术的盾构隧道施工系统,其特征在于:包括数据收集系统、数据传输系统、数据存储系统、数据处理系统、数据控制系统以及数据输出系统;数据收集系统根据盾构隧道施工现场进行布置并在数据控制系统控制下进行数据收集,收集到的数据通过数据传输系统传输到数据存储系统,数据处理系统在数据控制系统的控制下,从数据存储系统中读取数据进行数据处理,处理完成的数据通过数据传输系统存储在数据存储系统中,用户通过数据输出系统访问数据存储系统中的数据;数据输出系统包括VR设备,用户通过VR设备获取信息。
2.根据权利要求1所述的一种基于虚拟现实技术的盾构隧道施工系统,其特征在于:用户在获得数据控制系统的许可后,可通过数据输出系统访问数据存储系统中的数据。
3.根据权利要求1或2所述的一种基于虚拟现实技术的盾构隧道施工系统,其特征在于:数据控制系统包括使用权限模块和操作控制模块,用户在获得使用权限模块的许可之后,通过操作控制模块控制数据传输系统、数据收集系统、数据存储系统、数据处理系统和数据输出系统。
4.根据权利要求1所述的一种基于虚拟现实技术的盾构隧道施工系统,其特征在于:数据收集系统包括传感器模块、摄像机模块、信号收发与控制模块、供电模块、设备固定模块;传感器模块包括光学传感器群和力学传感器群,传感器模块的各个传感器设置盾构机各关键点以及始发竖井、到达竖井、已建区间隧道等盾构隧道中;摄像机模块用于采集传感器所在部位的图像;设备固定模块用于固定传感器模块、摄像机模块、信号收发与控制模块以及供电模块;供电模块包括电池供电与线路供电,向传感器模块、摄像机模块、信号收发与控制模块提供电能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
tp i h i u l e l y,S s t e eo h i u l e l y s s m fs il c i e a d b rn .T e vru lr ai y e w t t e vr a a i h t r t O a o d v l p t ev r a a i y t o h ed ma h n n oi g h i a e t t r t e t l y
关键 词 : 盾构 ; 虚拟现实 ; 建模 ; 软件开发 ; 漫游 ; 人机交互
DO :1 .9 3ji n 17 7 1 2 1.4 0 0 I 0 37 /. s.6 2— 4 02 0 .3 s X.
中 图分 类 号 :U4 9 9 5 .
文献标志码 : A
文 章 编 号 :17 7 1 2 1 )4— 5 8— 6 6 2— 4 X(0 2 0 0 9 0
n l g tc n lg e i e h oo y. n
Ke r y wo ds:s il h ed;v ru lr aiy;p o r m ;s fwa e d v lpi i a e lt t rga ot r e eo ng;r a ;h ma — o u e n ea to om u n c mp t ri tr ci n
0 引 言
虚 拟现 实 ( R, iu ely 也 称虚 拟 实境 或灵 V V r a R ai ) tl t
及标 、 矢量 场 的分 析 能力 , 加工 过程 和虚拟 样机 中很 使 多部 件 的运 动状 态难 以确定 。 因此 , 现设计 、 析与 实 分 展示 各系统 的集 成是 十分重 要 的 , 将三 者有 机结合 , 可 以研 发 出人 性化 的集 成 仿 真平 台 , 弥补 传 统 设计 手 段 的不 足 , 助工程 师 及 时发 现 设 计 、 配 、 造 过程 中 帮 装 制 存在 的 问题 , 而指 导设计 阶段 的工作 , 从 缩短 产 品的开 发周 期 , 降低产 品 的成本 , 高产 品 的设 计 质 量 , 强 提 增
第3 2卷
第4 期
隧道建 设
T n e n tu t n u n lCo sr ci o
V0. 2 No 4 13 .
Au . 2 1 g 0 2
21 02年 8月
盾构 及 掘 进 流 程 虚 拟 现 实 系统 开 发
韩伟锋 ,李凤远 ,陈启伟 ’
( . 构及 掘进技 术 国 家重点 实验 室 , 州 40 0 ; . 1盾 郑 50 1 2 中铁 隧道 集 团有限公 司 ,河 南 洛 阳 4 10 ) 7 09
s se d v l p d ha u h f ncin sv ru la s mb y,mo e n i l t n a d vs aie i lto fwo kngp o y t m e eo e ss c u to s a i a s e l t v me tsmu ai n iu lz d smu a in o r i r — o c d r n c l r n e tr .T i u lr a i y tm e e o e sh l f lt he su y a d ta nngi h h ed t — e u e a d s a a sa d v co s hev r a e lt s se d v lp d i ep u o t t d n r i i n t e s il un t y
A b t a t he c n e to h r d t n lvru lp oo y fs il c i e i n ag d b o n ci g t e d gtlp oo sr c :T o c p ft e ta ii a it a r ttpe o h ed ma h n se lr e y c n e tn h iia r t — o
( .Sae e aoaoyo he ciea dB r g Tcn l y Z egh u4 0 0 ,C ia 1 tt K yL brtr fS idMahn n oi eh oo , hn zo 5 0 1 hn ; l n g 2 hn ala u nl ru o , t. L oa g4 0 , e a , hn ) .C i R i yT n e GopC . Ld , u y n 7 0 9 H n n C ia a w 1
产 品的创新 性 。 国外对 于虚 拟样 机 的研究 具 有 起 点 高 、 目标 大 的 特点 ; 对虚 拟现 实技术 设备依 赖性 较强 ; 拟样 机系统 虚
一
境, 是一 种 可 以创 建 和 体 验 虚 拟 世 界 的计 算 机 系统 。 它利 用计 算机 技术 生 成 一个 逼 真 的 , 有 视觉 、 具 听觉 、 触 觉等 多感 知 的三维 虚 拟环 境 , 户 通 过使 用 各 种 交 用 互设 备 同虚拟 环境 进 行互 动 , 临其 境 地 与之 进 行 交 身
摘要 : 为进行盾 构施 工研究 和降低盾构掘进现场培训给盾构施工相关人员带来的风险 , 采用数字样机 结合虚拟现实 技术以拓展传 统 的虚拟样机 的概念 , 功能上具备虚拟装配 、 动仿 真、 运 工作过程及各种标矢 量场可视化 的仿真 能力 , 实现 了盾 构设备及施 工场景 的虚拟样机实例研究和实验室盾 t a a iy S s e f S i l a hi e a d Bo i v l p nto r u lRe l y t m o h ed M c n n rng t
HA i n ,L egun ,C E ie , N We eg f I ny a F H N Qw i