任务书-设计自动上料机械手方案及手臂升降机构姬兆寅
毕业设计(论文)-通用上下料机械手结构设计(全套图纸)
目录1 绪论 (1)1.1机械手概述 (1)1.2机械手的组成和分类 (2)1.2.1 机械手的组成 (2)1.2.2 机械手的分类 (4)1.3国内外发展状况 (6)1.4课题的提出及主要任务 (8)1.4.1 课题的提出 (8)1.4.2 课题的主要任务 (9)2 机械手的设计方案 (10)2.1机械手的座标型式与自由度 (10)2.2机械手的手部结构方案设计 (10)2.3机械手的手腕结构方案设计 (10)2.4机械手的手臂结构方案设计 (10)2.5机械手的驱动方案设计 (11)2.6机械手的控制方案设计 (11)2.7机械手的主要参数 (11)2.8机械手的技术参数列表 (11)3 手部结构设计 (14)3.1夹持式手部结构 (14)3.1.1 手指的形状和分类 (14)3.1.2 设计时考虑的几个问题 (14)3.1.3 手部夹紧气缸的设计 (15)3.2气流负压式吸盘 (18)4 手腕结构设计 (21)4.1手腕的自由度 (21)4.2手腕的驱动力矩的计算 (21)4.2.1 手腕转动时所需的驱动力矩 (21)5 手臂结构设计 (25)5.1手臂伸缩与手腕回转部分 (25)5.1.1 结构设计 (25)5.1.2 导向装置 (26)5.1.3 手臂伸缩驱动力的计 (26)5.2手臂升降和回转部分 (27)5.2.1 结构设计 (27)5.3手臂伸缩气缸的设计 (28)5.4手臂伸缩、升降用液压缓冲器 (31)5.5手臂回转用液压缓冲器 (32)第6章控制系统设计 (33)6.1控制系统硬件设计 (33)6.2 PLC梯形图中的编程元件 (33)6.3 PLC的I/O分配 (34)6.4 机械手控制系统的外部接线图 (35)6.5控制系统软件设计 (35)6.6公用程序 (36)6.7 自动操作程序 (37)5.8手动单步操作程序 (38)5.9 回原位程序 (38)6.10本章小结 (51)7 结论 (52)参考文献 (53)致谢 (55)全套图纸加1538937061 绪论1.1 机械手概述工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
立式精锻机自动上料机械手设计任务书
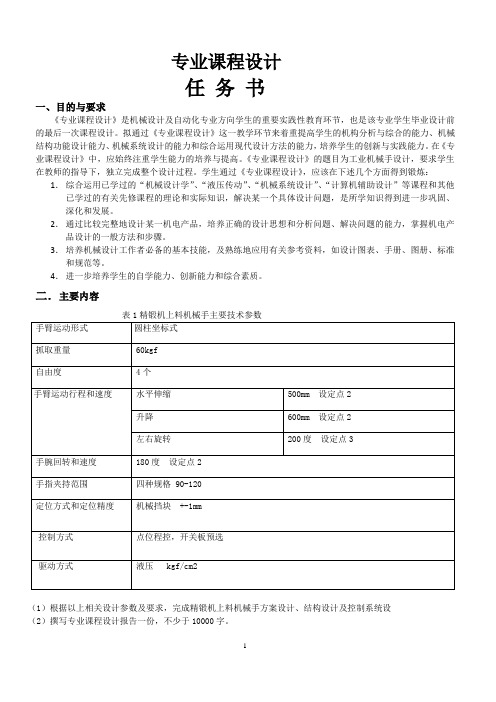
四川理工学院毕业设计(论文)立式精锻机自动上料机械手设计学生:学号:专业:机械设计制造及其自动化班级:机电一体化2006级4班指导教师:四川理工学院机械工程学院二〇一〇年六月四川理工学院毕业设计(论文)任务书设计(论文)题目:立式精锻机自动上料机械手设计系:机械工程学院专业:机械设计制造及自动化班级:学号:学生:指导教师:接受任务时间教研室主任(签名)系主任(签名)1.毕业设计(论文)的主要内容及基本要求1)、规格参数:抓重:60公斤;自由度数:4个;座标型式:圆柱座标;最大工作半径:1700毫米;手臂最大中心高:2300毫米手臂运动参数:手臂伸缩范围:0~500毫米;手臂伸缩速度: 伸出176毫米/秒,缩回233毫米/秒;手臂升降范围:0~600毫米;手劈升降速度:上升102豪米/秒,下降152毫米/秒;手臂回转范围:0°~200°(实际使用为95°);手臂回转速度:63°/秒手腕运动参数:手腕回转范围:0°~180°;手腕回转速度:201°/秒手指夹持范围:Φ30~Φ120毫米驱动方式: 液压2)、设计要求:(1)、全部设计图纸用AutoCAD绘制;(2)、设计说明书1份(40页以上)。
2.指定查阅的主要参考文献及说明(1)机械零件设计手册(2)工业机械手图册(3)机械设计手册(4)其他相关参考资料3注:本表在学生接受任务时下达摘要本文介绍了立式精锻机自动上料机械手与其它设备的配置关系及工作过程,并对机械手的动作进行了分析,详细论述了机械手总体方案的设计,特别是对实现预期要求动作的各种方案进行了比较分析,进而得出最终方案。
根据手臂的动作要求,采用圆柱坐标型机械手;机械手的自由度数为四个,它们是大臂的升降和回转运动,小臂的伸缩运动,手腕的回转运动;机械手手部结构采用两支点回转型;机械手驱动方式采用液压驱动。
控制方式为点位程序控制。
自动上料液压机械手的手臂结构设计(任务书)解读

江西科技学院本科生毕业设计(论文)任务书(工科及部分理科专业使用)题目:自动上料液压机械手的手臂结构设计学院:机械工程学院专业:班级:学号:学生姓名:起讫日期:指导教师:徐桂梅职称:高级工程师学院院长:审核日期:说明1. 毕业论文任务书由指导教师填写,并经学院或专业学科组审定,下达到学生。
2. 进度表由学生填写,每两周交指导教师签署审查意见,并作为毕业论文工作检查的主要依据。
3. 学生根据指导教师下达的任务书独立完成开题报告,1个月内提交给指导教师批阅。
4. 本任务书在毕业设计(论文)完成后,与论文一起交指导教师,作为论文评阅和毕业设计(论文)答辩的主要档案资料,是学士学位论文成册的主要内容之一。
一、毕业设计(论文)的要求和内容(包括原始数据、技术要求、工作要求)1、设计题目自动上料液压机械手的手臂结构设计2、原始数据(1)机械手抓重;10kg;(2)自由度;4(3)坐标方式;圆柱坐标;(4)最大工作半径:: 650 mm(5)手臂最大中心高:: 550 mm(6)手臂运动参数:伸缩范围630mm;最大速度200mm/s; 升降行程40mm; 回转角度220度;最大速度70°/s(7)手腕运动参数:回转范围0--180度,最大速度 90度每秒,上下摆动角度130度。
最大速度90度每秒(8)手指夹持范围:棒料Ø100~120mm3、技术要求:采用行程开关或可调机械挡块等作为定位方式,用液压系统驱动,机械手的定位精度为±1mm。
4、工作要求:所设计的液压机械手用于自动线上完成零件工序间的自动上料。
二、毕业设计(论文)图纸内容及张数1、液压原理图图1张(A3)2、手臂结构部件图1张(A0)3、主要零件图若干张(A3)4、设计说明书一份(8000字左右)三、毕业设计(论文)实物内容及要求图纸要求图面布置合理、正确清晰、符合相关标准及有关规定;论文要求文字通顺、编排规范。
四、毕业设计(论文)进度计划序号各阶段工作内容起讫日期备注五、主要参考资料[1] 吴相宪等主编:实用机械设计手册,中国矿业大学出版社,1993[2] 洪钟德主编:简明机械设计手册,同济大学出版社,2002[3] 机械设计手册编委会编著:机械设计手册第3卷,机械工业出版社,2004[4] 黄华梁、彭文生主编:机械设计基础(第三版),高等教育出版社,2001[5] 徐灏主编:新编机械设计师手册,机械工业出版社,1995[6] 濮良贵等机械设计高等教育出版社,2001[7] 黄平,朱文坚.《机械设计基础》.—北京:科学出版社,2009六、毕业设计(论文)进度表(本表每两周由学生填写一次,交指导教师签署审查意见)第一、二周时间: (月日至月日)学生主要工作:指导教师审核:年月日第三、四周时间: (月日至月日)学生主要工作:指导教师审核:年月日第五、六周时间: (月日至月日)学生主要工作:指导教师审核:年月日第七、八周时间: (月日至月日)学生主要工作:指导教师审核:年月日时间: (月日至月日)第九、十周学生主要工作:指导教师审核:年月日第十一、十二周时间: (月日至月日)学生主要工作:指导教师审核:年月日第十三、十四周时间: (月日至月日)学生主要工作:指导教师审核:年月日七、其他(学生提交)1.开题报告1份2.论文1份(5000字以上)指导教师:学院院长:学生开始执行任务书日期:学生姓名:送交毕业设计(论文)日期:。
机械手上下料控制系统任务书

天 津 理 工 大 学 专业设计报告题目:机械手上下料控制系统的设计学生姓名 届 学院 2013 自动化学院学号 班级 系 电气工程及其自动化 职称指导教师专业设计任务书、指导书 专业设计题目:机械手上下料控制系统的设计 Ⅰ.专业设计任务书(学生姓名: )一、专业设计的内容和要求(包括原始数据、技术要求、工作量)1、通过自动化综合应用技术设计,使学生初步掌握典型自动控制装置的基 本结构、工作原理以及应用技术;依据专业设计任务要求,完成相应工艺与控制 要求分析,进而完成控制系统的原理设计,最终完成各种控制装置的软硬件应用 设计、 接线、 调试以及监控系统的组态设计; 熟悉从简单的工况分析、 控制要求、 方案论证、 具体设计、 系统调试以及撰写文本报告的电气控制系统设计的全过程; 培养运用专业理论知识解决工程实际问题的能力。
机械手的机械结构主要包括由由气缸控制的大臂的旋转动作,中臂、小臂的 伸缩动作,以及爪的夹紧、放松动作,从而实现物料的位置转移;其动作转换靠 设置在各个不同部位的行程开关产生的通断信号传输到 PLC 控制器,通过 PLC 内部程序输出不同的信号,从而驱动外部线圈来控制电磁阀产生不同的动作,可 实现机械手的精确定位;其动作过程包括:下降、夹紧、上升、收缩、旋转、伸 长、下降、松开、上升、旋转、伸长;其操作方式包括:回原位、手动、单周期、 连续;来满足生产中的各种操作要求。
2.设计要求 [1]. 绘制控制流程图 [2]. 列出 I/O 地址表 [3]. 进行软硬件设计 [4]. 编写设计说明书 [5]. 设计小结二、专业设计参考资料[1]. 曹辉编 [2]. 王永华编 [3]. 贾德胜编 [4]. 胡晓朋编 可编程序控制器系统原理及应用 现代电气控制及 PLC 应用技术 PLC 应用开发实用子程序 电气控制及 PLC 电子工业出版社 北京航天航空大学出版社 人民邮电出版社 机械工业出版社 机械工业出版社[5]. 张力勋.机电一体化系统设计基础.[6].赵明编工厂电气控制设备机械工业出版社Ⅱ.专业设计指导书一、 专业设计要点、设计步骤1.原理图设计 (1).深入领会控制要求 (2).分析输入输出点的类型和性质,确定 I/O 点数 (3).绘制流程图 (4).进行硬件设计 (5).进行软件设计 (6).撰写课程设计说明书 (7).答辩二、 主要技术关键的分析、解决思路1. 正确分析输入、输出点的类型,区分开关量、模拟量 2. 熟悉并掌握编程技巧 3. 硬件设计要先选型三、专业设计进度安排 起 迄 日 期2012-11-26 2012-11-29 2012-11-30 2012-12-7 2012-12-14工 作 内容充分领会专业设计的目的意义及要求,掌握其方法, 了解气缸、 电磁阀以及涉及工艺的工作原理及控制要求 分析输入输出点的类型和性质,确定 I/O 点数 . 进行硬件设计 进行软件设计 系统调试,编写说明书的2012-12-21答辩。
自动上下料机械手设计
自动上下料机械手设计自动上下料机械手的设计首先需要考虑其结构和动力系统。
结构部分包括机械臂、抓取器、传感器以及控制系统等。
机械臂通常由多个关节组成,每个关节都能够进行旋转或伸缩,使机械手能够在三维空间内灵活移动。
抓取器通常采用夹爪或磁力吸盘等方式,以确保物料能够被牢固地抓取。
传感器可以用于检测物料的位置和重量,以及监测机械手的运动过程。
控制系统则负责控制机械手的运动,使其能够按照预设的路径和速度进行操作。
在机械手的设计中,需要考虑物料的形状、尺寸和重量等因素。
不同的物料需要不同的抓取器和动作方式来保证抓取和放置的准确性。
例如,对于较小的物料,可以采用夹爪和吸盘的组合方式,以确保物料的稳固性。
对于较大的物料,可以采用多个机械臂协同工作,以增加抓取和放置的能力。
另外,自动上下料机械手的设计还需要考虑安全性和可靠性。
机械手在工作过程中需要能够识别和避免障碍物,以防止发生意外事故。
同时,机械手的动力系统和控制系统需要具备稳定性和可靠性,以确保机械手能够长时间稳定地运行。
为了提高自动上下料机械手的效率,可以采用一些先进的技术和功能。
例如,可以采用视觉系统来识别物料的位置和形状,以便机械手能够准确地抓取。
还可以采用自适应控制算法,根据物料的特性和工作环境的变化,来调整机械手的运动方式和参数,以提高工作效率和减少能量消耗。
在自动上下料机械手的设计中,还需要考虑其与其他设备和系统的协调工作。
例如,需要与生产线中的输送带、传送机和包装机等设备进行无缝连接,确保物料的连续运输和加工过程。
总之,自动上下料机械手的设计需要综合考虑结构、动力、抓取器、传感器、控制系统等多个因素。
通过合理的设计和优化,可以实现机械手对物料的准确抓取、移动和放置,提高生产效率和产品质量。
同时,还需要注重安全性和可靠性的考虑,确保机械手能够稳定和长时间地运行。
液压传动自动上料机械手结构设计

液压传动自动上料机械手结构设计液压传动自动上料机械手是一种用于工业生产线的自动化机器人,用于将原材料或零件从一个位置移动到另一个位置。
液压传动自动上料机械手具有强大的承载能力、高速运动和高精度定位的优点,适用于重型工件的搬运和装配。
下面将分析液压传动自动上料机械手的结构设计。
1.机械手的框架结构:2.液压系统:液压传动是液压传动自动上料机械手的核心部分。
液压系统由液压泵、液压缸、液压阀门等组成。
通过液压泵提供的压力,液压缸可以实现各种动作,例如伸缩、旋转、举升等。
液压阀门控制液压传动系统的流量和压力,实现机械手的各种动作和操作。
3.机械手臂的设计:机械手臂是液压传动自动上料机械手的关键组成部分。
机械手臂通常由多个关节连接而成,可以实现多自由度的运动。
机械手臂的关节通过液压缸驱动,使机械手能够完成各种复杂的动作和任务。
机械手臂材质需要具有足够的强度和刚度,同时要求尽量轻量化,以减少能量消耗和摩擦损失。
4.末端执行器的设计:末端执行器是液压传动自动上料机械手的末端装置,用于抓取、搬运或装配工件。
末端执行器通常由夹具、卡盘或吸盘等组成,具有可调节的抓取力和灵活的动作。
末端执行器需要与机械手臂的关节连接,同时能够快速、稳定地完成工件的抓取和释放。
5.控制系统:液压传动自动上料机械手的控制系统由电气控制和液压控制两部分组成。
电气控制系统包含传感器、电机、编码器和控制器等,用于实时监测和控制机械手的运动和状态。
液压控制系统包含液压泵、液压缸、液压阀门等,用于控制机械手的动作和操作。
综上所述,液压传动自动上料机械手的结构设计涉及框架结构、液压系统、机械手臂、末端执行器和控制系统等多个方面。
合理的结构设计可以提高机械手的稳定性、精度和可靠性,从而提高生产效率和产品质量。
冲床用气动上下料机械手结构设计_任务书

年月日
系主任:
年月日
2015届毕业设计(论文)任务书
二级学院:机电工程学院班级:11机Y2
学生:徐磊学号:
指导教冲床用气动上下料机械手结构设计
课题类型
毕业设计□毕业论文
课题内容及其目标(指标)要求
课题来源于常州铭赛机器人科技有限公司,随着工业自动化程度的提高,工业现场的很多易燃、易爆等高危及重体力劳动场合必将由机器人所代替。这一方面可以减轻工人的劳动强度,另一方面可以大大提高劳动生产率。例如,目前在我国的许多中小型汽车生产以及轻工业生产中,往往冲压成型这一工序还需要人工上下料,既费时费力,又影响效率。为此,本课题设计上下料机械手可取代人工上下料。机械手主要技术参数:
进程安排
3-4周明确设计任务和内容,课题调查研究,查阅收集资料,
撰写开题报告
5-6周通用机械手坐标形式与结构形式的分析研究
7-9周手臂、手腕、手部结构方案设计,机械手驱动和控制方案设计
10-14周机械手机械构设计与装配图绘制
15-16周编写设计计算说明书,翻译外文资料
17周审图、评阅、准备答辩
18周答辩
1.抓重:10公斤(夹持式手部),5公斤(气流负压式吸盘)2.自由度数:4个3.最大工作半径:1500mm4.可用于100吨以上冲床上下料。
主要工作内容:1选取通用机械手的座标型式和自由度2设计出机械手的各执行机构,包括:手部、手腕、手臂等部件的设计,绘制结构装配图3.编制设计计算说明书4.翻译专业外文资料.
任务书(机械手)

任务书课题:机械手搬运机构的调试一、提出问题机械手搬运机构为YL235A型光机电设备的第二站,机械手是一种在程序控制下模仿人手进行抓取物料、搬运物料的装置,本次课需要机械手搬运机构能实现以下功能:(1)复位功能PLC上电,机械手手爪放松、上升,手臂缩回、左旋至左侧限位处停止。
(2)搬运功能若加料站出料口有物料,按启动按钮,气动机械手臂伸出到位后提升臂伸出,手爪下降到位后,手爪抓物夹紧夹紧到位后,提升臂缩回,手爪上升到位后机械手臂缩回到位后机械手臂向右旋转至右侧限位处,手臂伸出到位后提升臂伸出,手爪下降到位后,手爪放松,释放物料手爪放松到位后,提升臂缩回,手爪上升到位后机械手臂缩回到位后机械手臂向左旋转至左侧限位处,等待物料,开始新的工作循环。
其中,从安全性考虑,若加料站出料口有物料,按启动按钮,气动机械手臂伸出直至手爪放松、释放物料,每一步采用手动单步控制,而为了提高效率,手爪释放物料放松后直至返回到左侧限位处,则采用自动循环控制。
二、实施过程任务一:气动回路的连接1.手动单步控制功能与自动循环控制功能相比较,气动回路有无变化?2.出实现该功能要求的气路图。
试分析其工作原理。
3.根据气路图连接气动回路,并手动调节使电磁阀与其控制的气缸动作相对应,确保气路连接正确,为实现功能要求作铺垫。
任务二:电气回路的连接1.读题,确定输入量、输出量,写出I/O分配表2.画出PLC接口图3.根据PLC接口图,正确连接电气回路。
任务三:输入PLC控制程序1.画出PLC步进功能图(自己附纸)。
2.将功能图转换成梯形图(自己附纸)。
3.将程序输入PLC控制器。
任务四:调试设备1.调试设备,使设备按要求正确实现其功能。
2.根据现场调试,完成下列表格,并验证与理论分析结果是否相一致。
2600T油压机自动上下料机械手结构设计
2600T油压机自动上下料机械手结构设计摘要:为落实发展工厂智能制造理念,改善作业环境,降低职工劳动强度,提高作业安全性。
针对2600T油压机进行自动上下料机械手设计。
自动上下料系统由上料平台、下料平台、对料平台、上料机械手、下料机械手几部分组成,可实现抓取料,送料,码垛功能。
前言:2600T油压机主要加工产品为C70E下侧门板,C80E左右门板等大型板材,最大重量94Kg。
加工过程:安装模具—整垛上料(天车吊运)—单板送料(两人夹持送进模具)—压型—成型板下料(两人夹持拽出模具)—码垛—成品下料(天车吊运)。
人工上下料时,共需作业人员4人。
且作业人员需进入到滑块下方进行操作,存在极大安全隐患,同时作业人员劳动强度较大。
为解决上述问题,根据现场工艺平面对机械手机械结构进行研究设计。
1设计理念:1.1、在不破坏2600T压力机总工艺平面的基础上,进行自动化,智能化升级。
1.2、因现场条件约束[1],上、下料机械手钢结构采用斜梁单臂结构,不占原厂地的工艺平面。
设计中通过NX软件进行有限元分析,在抓取100KG板材时,钢结构变形量0.26mm。
机械手为五轴联动,最大回转半径4米,可实现上料抓取、对料抓取、送料抓取、下料码垛。
1.3、机械手各部传动为X轴伺服电机带动齿轮、齿条传动,实现横向移动。
Z轴伺服电机带动链轮、链条传动,实现机械手升降。
3个回转轴采用摆线针轮RV减速器,保证机械手回转精度[2]。
一号转臂安装有滚柱式回转支承,提高机械手使用稳定性。
机械手横梁及滑车均安装直线导轨,保证机械手抓取精度,滑枕安装两套平衡风缸,保证了其安全可靠性。
上料机构由6个94KG真空吸盘组成。
下料机构由12个DC24V电磁铁组成,可实现废料和产品的码垛功能。
上、下料传送装置,安装有缓冲平台,有效控制料件对平台的冲击,提高上、下料平台使用寿命。
对料平台上安有5组校对风缸,保证料件的抓取位置。
上、下料平台及对料平台控制线接头,均为航空快插接头,方便拆卸安装。
自动上下料机械手臂及主要零部件设计_毕业设计

自动上下料机械手直臂与夹持部件的三维设计及主要零部件设计致谢大学四年就这样匆匆过去了,在此我想对培养我四年的母校,传授我知识的老师,陪我一起度过酸甜苦辣的同学、朋友表示衷心的感谢。
特别感谢我的毕业论文指导老师张伟老师,是他悉心指导我完成了这个毕业设计。
张老师用他渊博的专业知识,严谨的治学之道,精益求精的工作作风感染着我。
从选题到答辩,都有张老师的指导,每次遇到问题,张老师都及时地给我们解答,这篇毕业论文的顺利完成,张老师付出了太多,在此,再次向张老师表示崇高的敬意和真挚的感谢。
这篇论文的顺利完成,也离不开我们机械手设计小组的各个成员的共同努力。
在此,特别感谢我的组长陈述,组员张益、林日玖、金守勇这四位同学,是他们用汗水浇灌了今天的成果。
另外,感谢我们班的同学,感谢他们的关心和帮助。
自动上下料机械手直臂与夹持部件的三维设计及主要零部件设计摘要:机械手能代替人工操作,起到减轻工人的劳动强度,节约加工时间,提高生产效率,降低生产成本的特点。
在实用的基础上,对自动上下料机械手直臂与夹持部件进行三维设计,其中分为三个部分,手爪、手腕、直臂。
设计手爪为平移型夹持式手爪,传动结构为滑动丝杆。
手腕为回转型,转动角度为0-180°,传动结构为蜗轮蜗杆。
直臂传动结构为滚珠丝杆。
整体机械手为直角坐标型,驱动均为电机驱动,结构简单可靠,精度高。
关键词:机械手;直臂与夹持部件;Pro/e三维设计;CAD二维设计中图分类号:TH24目次摘要 (I)目次 (III)1绪论 (1)1.1前言和意义 (1)1.2 工业机械手的简史 (1)1.3 国内外研究现状和趋势 (2)1.4 本章小结 (3)2机械手直臂部分的总体设计 (3)2.1 执行机构的选择 (3)2.2 驱动机构的选择 (4)2.3传动结构的选择 (5)2.4 机械手的基本形式选择 (6)2.5 机械手直臂部分的主要部件及运动 (6)2.6 机械手的技术参数 (8)2.8 本章小结 (8)3机械手手爪的三维设计 (9)3.1 手部设计基本要求 (9)3.2 典型的手部结构 (9)3.3 机械手手爪的设计计算 (9)3.3.1选择手爪的类型及夹紧装置 (9)3.3.2 手爪夹持范围计算 (10)3.3.3 滑动丝杠设计 (11)3.3.4 直齿轮设计 (13)3.3.5电机选型 (14)3.4 机械手手爪的三维出图及其主要零部件出图 (15)3.5 本章小结 (18)4机械手手腕部分的三维设计 (18)4.1腕部设计的基本要求 (18)4.2 腕部的结构以及选择 (19)4.2.1 典型的腕部结构 (19)4.2.2 腕部结构和驱动机构的选择 (19)4.3 腕部的设计计算 (19)4.3.1 蜗轮轴的设计计算 (19)4.3.2 蜗轮齿轮设计 (21)4.3.3 步进电机选型 (23)4.4 手腕部分出图及主要零部件出图 (24)4.5本章小结 (29)5 直臂部分的三维设计 (31)5.1 手臂的结构的选择及其驱动机构 (31)5.2 滚珠丝杠设计 (31)5.3 锥齿轮设计 (34)5.4 电机选型 (36)5.5 机械手直臂部分三维出图及主要零部件出图 (37)5.6 本章小结 (40)6.总结 (40)学位论文数据集 (43)1绪论1.1前言和意义机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
自动上下料机械手臂及主要零部件设计

自动上下料机械手臂及主要零部件设计自动上下料机械手臂是一种用于工业生产中的自动化设备,主要用于将原材料从储存区域送到生产线上,并将成品从生产线上移出。
它具有快速、精准和高效的特点,可以大大提高生产效率和降低劳动力成本。
在设计自动上下料机械手臂及其主要零部件时,需要考虑以下几个方面:1.机械手臂结构设计:机械手臂应该具有灵活的结构,能够适应不同形状和尺寸的工件。
常见的机械手臂结构包括:伺服电机传动、滑块传动、摆线减速齿轮传动等。
机械手臂的关节数量和布局应根据具体需要进行设计,以保证其灵活性和稳定性。
2.机械手臂控制系统设计:机械手臂的控制系统应该具备高精度的位置控制能力和快速的响应速度。
常用的控制方法包括:PID控制、模糊控制、神经网络控制等。
控制系统应能够实现自动化的上下料操作,并能够适应不同工况下的控制需求。
3.夹具设计:夹具是机械手臂上用于抓取和移动工件的部件。
夹具的设计应该考虑到工件的形状、尺寸和重量等因素,并保证夹持力的稳定性和安全性。
常见的夹具设计包括机械夹具、气动夹具和真空夹具等。
4.传感器设计:传感器是机械手臂上的重要部件,用于检测工件位置、重量和形状等信息。
常见的传感器包括光电传感器、压力传感器和力传感器等。
传感器的选型和布局应根据具体的应用需求进行设计,以提供准确的反馈信息。
5.安全措施设计:机械手臂在工作时可能存在风险,因此需要设计相应的安全措施来保护操作人员和设备的安全。
常见的安全措施包括急停按钮、防撞装置和速度监控系统等。
总之,设计自动上下料机械手臂及主要零部件需要充分考虑机械结构、控制系统、夹具设计、传感器设计和安全措施等方面的要求,以保证机械手臂的可靠性和性能。
同时,根据具体的应用需求,也需要进行相应的优化和改进,以满足不同的生产场景。
上料机械手课程设计
上料机械手课程设计一、课程目标知识目标:1. 学生能够理解上料机械手的基本结构及其工作原理,掌握相关术语和概念。
2. 学生能够描述上料机械手在工业生产中的应用场景,了解其在自动化生产线中的作用。
3. 学生掌握上料机械手的操作步骤和安全规范,了解其维护与保养的基本方法。
技能目标:1. 学生能够运用所学知识,分析并解决上料机械手操作过程中遇到的问题。
2. 学生能够设计简单的上料机械手动作程序,实现物料的抓取、搬运和放置。
3. 学生通过实际操作,提高动手能力和团队协作能力,培养工程思维。
情感态度价值观目标:1. 学生培养对机械工程及自动化技术的兴趣,激发创新意识和探索精神。
2. 学生树立安全生产观念,养成良好的操作习惯,注重环保和资源节约。
3. 学生通过本课程的学习,增强对现代工业生产中自动化设备应用的认识,提高对国家制造业发展的信心。
课程性质:本课程为技术设计与实践课程,结合理论知识与实际操作,培养学生的动手能力和创新能力。
学生特点:初三学生具有一定的物理知识和动手能力,对新技术和新设备充满好奇,喜欢实践操作。
教学要求:结合学生特点,注重理论与实践相结合,充分调动学生的积极性,提高学生的实践能力和创新能力。
在教学过程中,关注学生的个体差异,因材施教,确保每位学生都能达到课程目标。
通过课程学习,使学生在知识、技能和情感态度价值观方面取得具体的学习成果,为后续学习打下坚实基础。
二、教学内容本课程教学内容主要包括以下几部分:1. 上料机械手基础知识:- 机械手的基本结构及功能- 常用传感器及其作用- 机械手的工作原理及控制方式2. 上料机械手的操作与编程:- 机械手的操作步骤及安全规范- 常用编程指令及其功能- 简单动作程序的设计与调试3. 上料机械手的应用与维护:- 上料机械手在工业生产中的应用案例- 机械手的维护与保养方法- 常见故障分析与排除教学大纲安排如下:第一课时:上料机械手基础知识1.1 机械手的基本结构及功能1.2 常用传感器及其作用1.3 机械手的工作原理及控制方式第二课时:上料机械手的操作与编程2.1 机械手的操作步骤及安全规范2.2 常用编程指令及其功能2.3 简单动作程序的设计与调试第三课时:上料机械手的应用与维护3.1 上料机械手在工业生产中的应用案例3.2 机械手的维护与保养方法3.3 常见故障分析与排除教学内容与课本关联性:本课程教学内容紧密结合课本第三章“自动化设备”的内容,通过实践操作,使学生更好地理解和掌握上料机械手的相关知识。
自动送料机器人臂部设计.doc

山西大同大学本科生毕业设计中文题目:自动送料机器人臂部设计英文题目:Automatic feeding robot arm design学院:煤炭工程学院姓名:学号:专业:机械设计制造及其自动化班级:指导教师:武智职称:初级完成日期:年月日摘要现代科学技术发展的特点之一就是机械技术、电子技术和信息技术的结合,机器人就是这种结合的产物之一。
本文主要对国内外的机器人发展现状进行研究,通过学习已经投入运用的机器人实物,了解了搬运机器人的工作机理。
在此基础上,确定了自动送料机器人的基本系统结构,对自动送料机器人的运动进行了简单的三维模型分析。
本课题主要对自动送料机器人的机械部分展开设计,通过详细了解自动送料机器人在工业上的应用现状,提出了具体的设计要求,并根据自动送料机器人各部分的设计原则,进行了系统总体方案设计。
本文主要对机器人的臂部机械结构进行设计,采用了圆柱坐标结构,对自动送料机器人的手臂材料、结构与平稳性进行分析,并对手臂直线运动的驱动力进行了计算,还对机器人手臂运动学进行分析,完整的把自动送料机器人手臂的机械结构表达出来。
关键词:机器人;臂部;圆柱坐标AbstractOne of the features of modern science and technology development is the combination of mechanical technology,electronic technology and information technology and robots are the products of this combination. This dissertation focuses on the research of domestic and foreign development status of the robot. Through the study of the physical robot has been put into use to understand the working mechanism of handling robot.On this basis, the basic system structure of automatic feeding robot is established and the movement of automatic feeding robot was analyzed with simple 3D model.This topic mainly launches the design of mechanical parts of automatic feeding robot, Through the detailed understanding of automatic feeding machine's application status in industry, the specific requirement of design is put forward. According to the design principle of automatic feeding robots' every part,the systematic overall scheme is designed. This paper focuses on the design of the robot arm mechanical structure, with a cylindrical structure to analysis the automatic feeding robot 's arm material, structure and stability. And the driving force on the arm motion is calculated, the robot arm kinematics is analysed, then the mechanical structure of automatic feeding robot arm is expressed completely.Key words: robot; arm; cylindrical coordinate目录1 绪论 (1)1.1机器人概述 (1)1.2机器人的历史、现状 (3)1.3机器人发展趋势 (5)1.4本文主要研究内容 (6)2自动送料机器人的总体方案 (7)2.1总体设计的思路 (7)2.1.1系统分析阶段 (7)2.1.2 技术设计阶段 (7)2.2自由度和坐标系的选择 (7)2.3自动送料机器人的组成 (9)2.3.1执行机构 (9)2.3.2驱动机构 (11)2.3.3 传动方式 (12)2.4搬运机器人的技术参数 (13)3臂部结构的设计及有关计算 (15)3.1手臂的结构 (15)3.2机器人手臂材料的选择 (15)3.3臂部设计需要注意的问题 (16)3.4臂部的平稳性 (19)3.5手臂直线运动的驱动力计算 (19)3.5.1 手臂直线运动的驱动力计算 (20)3.5.2手臂直线运动的偏重力矩计算 (23)3.6升降不自锁条件分析计算 (25)3.7轴承的选择分析 (25)3.8手臂各部位的尺寸 (26)4 机器人手臂运动学分析 (31)4.1机器人手臂运动参数分析 (31)4.1.1 D-H坐标变换方法 (31)4.1.2 机器人手臂机构的结构参数 (31)4.2运动学分析 (33)4.2.1运动学分析概述 (33)4.2.2搬运机器人的动作范围 (33)结束语 (35)参考文献 (36)致谢 (37)1绪论1.1机器人的概述在现代工业中,机械化和自动化的生产过程已成为一个突出的主题。
上下料机械手课程设计说明书
专业课程设计任务书一、目的与要求《专业课程设计》是机械设计及自动化专业方向学生的重要实践性教育环节,也是该专业学生毕业设计前的最后一次课程设计。
拟通过《专业课程设计》这一教学环节来着重提高学生的机构分析与综合的能力、机械结构功能设计能力、机械系统设计的能力和综合运用现代设计方法的能力,培养学生的创新与实践能力。
在《专业课程设计》中,应始终注重学生能力的培养与提高。
《专业课程设计》的题目为工业机械手设计,要求学生在教师的指导下,独立完成整个设计过程。
学生通过《专业课程设计》,应该在下述几个方面得到锻炼:1.综合运用已学过的“机械设计学”、“液压传动”、“机械系统设计”、“计算机辅助设计”等课程和其他已学过的有关先修课程的理论和实际知识,解决某一个具体设计问题,是所学知识得到进一步巩固、深化和发展。
2.通过比较完整地设计某一机电产品,培养正确的设计思想和分析问题、解决问题的能力,掌握机电产品设计的一般方法和步骤。
3.培养机械设计工作者必备的基本技能,及熟练地应用有关参考资料,如设计图表、手册、图册、标准和规范等。
4.进一步培养学生的自学能力、创新能力和综合素质。
二.主要内容(1)根据以上相关设计参数及要求,完成精锻机上料机械手方案设计、结构设计及控制系统设(2)撰写专业课程设计报告一份,不少于10000字。
1.机械手总装图1张(0号图纸)、部件图若干张(0号图纸);2.全部非标零件图(图纸类型是零件类型及复杂程度而定);3.液压原理图和电器控制原理图各一张;4.撰写专业课程设计报告一份,不少于10000字。
五、考核方式专业课程设计的成绩评定采用四级评分制,即优秀、良好、通过和不通过。
成绩的评定主要考虑学生的独立工作能力、设计质量、答辩情况和平时表现等几个方面,特别要注意学生独立进行工程技术工作的能力和创新精神,全面衡量学生的真实质量。
学生姓名:安蕾刘国威刘欣磊彭澎孙赫俊指导教师:杨晓红、花广如、杨化动2011年12月30日一机械手动作过程和主要设计参数介绍1.1 任务概述本次专业课程设计的任务是设计精锻机上料机械手。
立式精锻机自动上料机械手-手臂伸缩机构设计要点

立式精锻机自动上料机械手——手臂伸缩机构设计[摘要] 机械手的出现是随着工业技术的发展,人们发现人工的操作越来越不能满足工业生产的要求,因而设计出了机械手去替代人工做一些危险的工作。
这篇论文详细介绍了立式精锻机自动上料机械手的组成、结构特点和工作过程。
机械手主要是执行部份、驱动部分和控制部分组成。
执行部分包括机械手的手部、机械手的手臂、机械手的升降和回转结构。
本文对以上各机构的结构设计、计算以及校核方法作了具体的描述和分析,实现了机械手四个自由度、行程以及强度各方面的要求。
对于驱动部分,选择了液压驱动的驱动方式,对液压系统进行设计和对液压系统的传动方式进行设计,最后选择合适的液压元件并确定液压系统,通过上述部分设计,设计出了立式精锻机自动上料机械手,达到本次设计的要求。
[关键词] 立式精锻机;自动上料机械手;结构设计;液压驱动Vertical precision forging machine, automatic feeding manipulator arm telescopic mechanism design[Abstract] The appearance of manipulator is developed the industry technology. When people find that the manufacture by manual labor can not satisfy the demands of the industry produce, so the manipulator was designed to do something dangerous in stead of human. This paper introduces the main function, the structure feature and the composition of automatic feeding manipulator of vertical forging machine in detail. The composition of the mechanical industry machinery includes three parts: the mechanical part, the drive part and the the control part. The mechanical part mainly includes the hand of the manipulator, the arm of the manipulator and the fluctuation and rotation structure of the manipulator. The paper has made the concreted description and analysis on the general design process and the calculated method of the manipulator. Achieves the four-freedoms,route and some other aspects of the manipulator. Regarding the drive part, the author selects the hydraulic drive style,and then carries on the design calculation to the hydraulic system and carries on the design to the hydraulic transmission way, finally choose appropriate hydraulic pressure part, and then define hydraulic system. Through the above parts of designs, the author designs a hydraulic automatic feeding manipulator of vertical forging machine to achieve the design goal.[Keywords] Vertical forging machine; Automatic feeding manipulator;Structure design;Hydraulic drive.前言机械手是由执行机构、驱动装置、控制系统和智能系统组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学生姓名:姬兆寅班级:
毕业设计(论文)任务书
一、毕业设计(论文)的任务和具体要求:
1.了解一般工业机械手的应用及其基本组成
2.设计自动上料机械手方案
手部握紧、手腕回转、手臂伸缩、手臂回转、手臂升降、手部松开。
3.设计手臂升降机构
4.撰写毕业设计论文
5.完成毕业答辩
二、毕业设计(论文)说明书应包含的内容
1.摘要
2.关键词
3.目录
4.一般工业机械手的应用及其基本组成
5.自动上料机械手方案
6.手臂升降机构工作原理、设计过程
7.结束语
8.参考文献
三、毕业设计结束应提交的内容:
1.自动上料机械手方案图1张。
2.手臂升降机构装配图1张。
3.毕业设计论文1份。
四、其他要求:
1.毕业设计(论文)图纸要求按照有关国标绘制、打印。
2.毕业设计(论文)说明书要求观点明确,论据充实,数据可靠,条理清楚。
3.毕业设计(论文)的格式必须完全按照学校统一样式要求完成。
4.毕业设计(论文)的字数要求8000字左右。
5.毕业设计(论文)一律用A4纸张打印,统一用学校的封面并装订成册。
五、毕业设计(论文)的期限:
自2010 年9 月 6 日至2010 年12 月12 日
指导老师(签字)
日期。