车距监控防撞系统DTR
智能汽车碰撞警告系统及相应标准
智能汽车碰撞警告系统及相应标准何为智能汽车?智能汽车是在普通汽车的基础上增加了先进的传感器(雷达、摄像)、控制器、执行器等装置,通过车载传感系统和信息终端实现与人、车、路等的智能信息交换,使汽车具备智能的环境感知能力,能够自动分析汽车行驶的安全及危险状态,并使汽车按照人的意愿到达目的地,最终实现替代人来操作的目的。
(定义来源:《中国汽车报》2014年04月08日)而作为智能汽车上最为核心的部分之一,车辆的各类预警系统技术近年来迅猛发展,今天给大家盘点一下智能汽车的预警技术及其相应标准。
车距检测及警告(HMW)行人检测(PDS):行人检测系统(PDS)作为保障汽车,行人安全的一种主动安全手段,已经成为产业界和研究界共同关注的一个研究点.行人侦探系统PDS是一种侦测车辆前方行人状况的智能高科技,另外,不同于夜视系统智能在夜间感应前方行人状况,PDS可以识别道路行人状况并在驾驶者疏忽的时候,预防任何潜在的事故发生。
汽车前撞报警系统(FCW,ISO 15623-2013 ECE R13)ForwardColision Warning (FCW):FCW能够通过雷达系统来时刻监测前方车辆,判断本车于前车之间的距离、方位及相对速度,当存在潜在碰撞危险时对驾驶者进行警告。
FCW系统本身不会采取任何制动措施去避免碰撞或控制车辆。
车道偏离报警系统(LDWS,ISO 17361-2007 ECE R13)Lane departure warning:这个智能型高级驾驶辅助系统的核心部件是一个摄像头,它安装在汽车后视镜的近旁,对准汽车前方的道路标线。
摄像头中的软件可分析图像并通过探测道路标线确定汽车是否就要偏离车道,同时确定汽车相对于标线的位置。
随后它可以根据行驶方向计算出汽车将在何时越过标线。
驾驶者通常会由方向盘振动以及轻微的转向干预得到危险警告。
这个电子”副驾驶员”在后台工作,仅当驾驶者似乎无意间要脱离车道时才会发出警告,但如果驾驶者打了转向灯,警告就会被阻止。
车辆监控跟踪方案
车辆监控跟踪方案随着社会的发展以及技术的进步,车辆监控跟踪系统已被广泛应用于交通、物流等行业。
通过车辆监控跟踪系统,可以实现实时跟踪车辆的位置、状态等信息,提高安全性和效率,降低车辆管理成本。
本文将介绍车辆监控跟踪方案的实现原理和应用案例。
方案实现原理车辆监控跟踪方案主要依靠全球定位系统(GPS)和移动通信网络(如4G、5G)等技术,通过GPS接收器获取车辆的实时位置信息,并通过移动通信网络将信息传送到监控中心,监控中心再根据需求进行处理和分析,提供实时监控和跟踪服务。
车辆监控跟踪系统主要由车载终端、基站、GPS卫星和监控中心组成。
具体实现过程如下:1.车辆安装车载终端。
车载终端是车辆监控跟踪系统的核心组件,可以实现车辆位置、状态等信息采集和传输。
车载终端可以采用物联网技术,实现车辆与监控中心的无线通信。
2.GPS卫星定位。
车载终端获取车辆位置信息依靠的是GPS卫星,GPS卫星通过卫星信号传输车辆的经纬度等信息,将其传送到车载终端。
3.移动通信网络传输。
车载终端通过移动通信网络将车辆信息上传到监控中心,移动通信网络可以选择使用4G、5G等网络,具体选择适合的网络取决于实际需求和网络覆盖情况。
4.监控中心数据处理。
接收到车辆信息后,监控中心进行数据处理和分析,例如对车辆行驶路线进行规划和监控,车辆状态的实时查询等。
方案应用案例车辆监控跟踪系统的应用范围广泛,例如物流公司、出租车公司、公共交通等。
在各行各业中,车辆监控跟踪系统为企业提供了很大的便利,可以大大提高车辆运行效率,缩短调度时间和成本,还可以减少违法违规行为,提高司机和货物的安全性。
具体案例如下:1.物流公司对于物流公司来说,车辆监控跟踪系统可以提高物流的效率和安全性。
通过车辆监控跟踪系统可以实现实时监控货物的状态和位置,对于重要物品可以进行实时跟踪,及时反馈货物所处位置,提高运输效率,降低货物丢失风险。
2.出租车公司出租车公司可以通过车辆监控跟踪系统及时把握出租车的位置和运营状况,实现出租车的调度和管理。
车辆前向碰撞预警方案
车辆前向碰撞预警方案
车辆前向碰撞预警系统是一种先进的车辆安全技术,可以通过车辆与周围环境
的感知,对前方的障碍物和车辆进行实时监测和预警,避免车辆的前向碰撞事故。
本文将介绍车辆前向碰撞预警方案的原理、实现方式和前景。
原理
车辆前向碰撞预警方案主要依靠雷达、摄像头、LIDAR等传感器,采集车辆前
方的车道信息、障碍物信息、前车信息等,通过传感器识别出前方的障碍物和车辆,并计算出与前车的距离、速度差等信息。
当车辆与前方的车辆或障碍物保持过近距离或速度差过大时,系统将发出警报,提醒驾驶员减速或采取其他避让措施,避免前向碰撞事故的发生。
实现方式
车辆前向碰撞预警方案的实现方式主要包括传感器、控制器和显示器三个部分。
传感器负责采集前方信息并将其传输到控制器,控制器根据传感器的信号计算前方车辆和障碍物的距离和速度,同时将这些信息传输给显示器,提供给驾驶员参考。
一般来说,车辆前向碰撞预警系统会采用多传感器融合的方式,将雷达、摄像头、LIDAR等传感器的数据融合在一起,提高系统的准确性和可靠性。
前景
随着人们对车辆安全性的越来越高的要求,车辆前向碰撞预警系统已经成为标配,越来越多的汽车品牌开始将其引入到汽车安全系统中。
据预测,未来车辆前向碰撞预警系统将继续发展壮大,传感器的精度和响应速度将进一步提升,同时与自动驾驶技术的结合也将为系统带来更多的功能和应用场景。
结论
车辆前向碰撞预警方案是一种重要的车辆安全技术,它将车辆与周围环境的感
知与实时计算相结合,以预测并避免前向碰撞事故的发生。
未来,随着技术的不断发展,车辆前向碰撞预警系统有望成为更加普及和可靠的车辆安全解决方案。
汽车防撞预警系统原理
汽车防撞预警系统原理
汽车防撞预警系统是基于车辆周围环境感知技术和车辆动态参数的测量,通过实时采集和处理数据,提供驾驶员及时的预警信息,以避免碰撞事故的系统。
系统原理主要包括以下几个方面:
1. 环境感知技术:通过使用激光雷达、摄像头、超声波等传感器设备,对车辆周围的对象进行感知。
其中,激光雷达可以提供车辆周围的距离和速度信息,摄像头可以获取图像信息,超声波可以测量障碍物的距离。
2. 数据处理和分析:系统会对感知到的环境数据进行处理和分析,以识别和跟踪周围的对象,例如其他车辆、行人、障碍物等。
同时,系统会根据测量的车辆动态参数,如速度、加速度等,来评估车辆的运动状态。
3. 碰撞风险评估:通过对感知到的环境数据进行分析,系统可以评估车辆与周围对象的距离、速度差异等参数,以预测可能发生的碰撞风险。
系统会对预测的碰撞风险进行量化,并根据预设的警戒阈值确定是否预警驾驶员。
4. 预警信息显示:当系统检测到碰撞风险时,会向驾驶员发出预警信息,例如声音警示、闪烁警示灯、振动警示等。
预警信息应该具有明确、准确的提示内容,同时要避免对驾驶员的干扰和恐慌。
汽车防撞预警系统的原理是基于车辆感知和参数测量的数据处理和分析,通过评估碰撞风险并向驾驶员发出预警信息,提供及时的警示和避免碰撞事故的功能。
雷达测距控制系统

下图为奔驰车距监控防撞系统,可以在车辆停车和倒 车时检测车辆前、后、侧面的障碍物距离,在靠近障 碍物时会发出声音警报。
图1.1 系统示意图
2 雷达测距控制系统的组成
DTR雷达控制模块 DTR雷达传感器(激光雷达、 毫米波雷达传感器) DTR电脑 可变巡航控制(CC)开关 DTR开关座(具有距离测量电位差计和警报信号消除开关) 信息联络(CAN)(用于仪板上的显示装置及警报信号 发布装置和各种控制机构的信息联络) 天线、发射/接受组件 中频信号处理装置 电源及报警显示
图2.1
原理图
装有避撞雷达的汽车上了高速公路以后,驾驶员启动车上的避撞雷达。 雷达选定好跟随的汽车以后,被跟随的汽车就成了后面汽车的“目标 车”,无论加速,减速,停车,启动,后面的汽车都会在瞬间之内知 晓,如果前面的汽车行驶一段时间之后,不再适合于自己的“目标 车”,驾驶员可以重新选择另一辆“目标车”。为频带宽度,T为扫频周期,调制信 号为三角波,c为光速,R和V分别为目标的相对距离和相对速度。在发 射信号的上升段和下降段,中频输出信号可以表示为:
若忽视汽车与目标间的相对速度,则两车的距离可以表示为: R=(1/2)c*△T 其中R为相对距离, c为光速, △T为从发射到接受的时间间隔.
5.报警系统:安装在驾驶室前部,精确显示前方障碍物的距离值, 面板上的数字键,可根据实际情况设定保京距离值,还有特殊输 出接口,当系统报警时,该接口会输出TTL电平,可用于自动刹车 开发
3.雷达测距的基本原理
工作原理:在车辆行驶中,雷达窄波束向前发射电磁波信号,当发射信号遇 到目标时,被反射回来被同一天线接收,经混频放大处理,可用其差拍信号 间来表示雷达与目标的距离,再根据差频信号相差与相对速度关系,计算出 目标对雷达的相对速度,微处理器将上述两个物理量代入危险时间函数数字 模型后,既可算出危险时间,当危险程度达到各种不同等级时,分别输出报 警信号或通过车辆控制电路去控制车速或刹车。当距离过近时,有些车型警 告喇叭会响起,以警告驾驶者注意前方障碍物已经接近车体,同时 DTR电脑 会通过车身电脑网络CAN-BAS与发动机ECU、变速器ECU及ESP(车辆稳定 行驶系统) 、ABS刹车系统ECU,通过限制发动机输出转速,调节刹车作用 力及变速箱挡位,控制定速巡航的车速。若前方无障碍物(100米为限)则警 告灯会熄灭,车子便会加速至预设的巡航速度
汽车防撞预警系统设计
汽车防撞预警系统设计一、系统概述汽车防撞预警系统主要由传感器、控制器、报警装置和执行机构四部分组成。
传感器负责实时监测车辆周围的环境信息,控制器对收集到的信息进行处理和分析,判断是否存在碰撞风险,如有风险,立即启动报警装置并控制执行机构进行干预。
二、传感器选型与布局1. 传感器选型为实现全天候、全方位的监测,本系统选用毫米波雷达、摄像头和超声波传感器三种传感器。
毫米波雷达具有穿透力强、抗干扰能力强等优点,适用于雨雾等恶劣天气;摄像头可识别道路标志、行人和车辆等目标;超声波传感器则用于检测车辆周围的近距离障碍物。
2. 传感器布局根据车辆结构和行驶需求,本系统将传感器均匀分布在车辆的前后左右四个方向,确保无死角监测。
具体布局如下:(1)前方:安装两个毫米波雷达,分别位于车辆前保险杠两侧,覆盖前方120°的监测范围。
(2)后方:安装一个毫米波雷达,位于车辆后保险杠中央,覆盖后方60°的监测范围。
(3)左右两侧:各安装一个摄像头,分别位于车辆左右两侧,覆盖左右两侧60°的监测范围。
(4)四周:安装四个超声波传感器,分别位于车辆前后保险杠和左右两侧,用于检测近距离障碍物。
三、控制器设计1. 算法设计(1)数据预处理:对传感器采集到的数据进行去噪、滤波等处理,提高数据质量。
(2)目标检测与识别:通过摄像头识别道路标志、行人和车辆等目标,结合毫米波雷达和超声波传感器数据,确定目标的位置、速度等信息。
(3)碰撞风险评估:根据目标的位置、速度等信息,计算与本车的相对距离和相对速度,预测未来一段时间内可能发生的碰撞情况。
(4)预警决策:根据碰撞风险评估结果,判断是否触发预警。
2. 硬件设计控制器硬件部分主要包括处理器、存储器、通信接口等。
处理器选用高性能、低功耗的嵌入式芯片,满足系统实时性和稳定性的需求;存储器用于存储算法模型和运行数据;通信接口负责与传感器、报警装置和执行机构进行数据交互。
奔驰控制电脑缩写说明
A/C空调air conditioningAAC自动空调automatic air conditioningAAM主功能模组[M-CLASS 用] active body controlAB 安全气囊air bagABC 主动悬挂系统[无极限调整] active body controlABS 防抱死制动系统anti-lock breaks systemACS 自动离合器系统automatic clutch systemACSR儿童座椅自动识别系统automatic child seat recognitionADM 自动防眩内后镜automatic simming inside rearviewADS 自动减震适应系统[4档] adaptive danping systemAH 辅助暖气auxiliary heaterAICC 车距车速自动导航系统autonomous intelligent cruise controlAIR 二次空气喷射系统secondary air injectionAJC 防车身抖动调节anti-jerk controlALA 自动连接调节器automatic linkage adjusterALB 自动负荷感应制动压力控制automatic load-sensitive break pressure contrlAP 油门踏板accelerator pedalAPS 自动导航系统automatic pilot systemASD 自动差速锁装置automatic locking differentialAS 天线系统antenna systemsASR 加速防滑装置acceleration slip reguiationASSYST 保养提示系统active service systemAT自动变速箱automatic transmissionATA 防盗警报系统anti-theft alarmATM 气压补偿接头connection to barometric pressure compensationAUTO A/C 空调[自动恒温] air conditioningBA 倒车辅助系统backup assistBARE 大气压力barometric pressureBAS 制动辅助系统break assist systemBCAPC 气压增压补偿barometric pressure charge air pressure compensationBDC 下至点bottom dead centerBM 基础模块base moduleBPC 气压补偿barometric pressure compensationCA 关门辅助closing assistCAN 控制器间讯息联网系统controller area networkCARB 化油器carburetorCC 巡航系统cruise controlCCM 组合开关控制模块combination control moduleCDC 激光唱机自动换碟装置CD changerCF 舒适设备convenience featureCFI [mechanical] 连续式燃油喷注系统[机械] continuous fuel injection system [mechanical] CKA 曲轴转角crank angleCKP 曲轴位置crankshaft positionCL中央门锁central lockingCMP 轮轴位置CNS 通讯及导航系统COMAND 驾驶舱管理及数据系统CRD 共轨柴油机CST 敞篷车软顶CTEL 蜂窝式电话CTP 节流阀关闭位置CTU 总触发器D2B 数码数据电路DAS驾驶认可系统DCM 车门控制模组DFI 电控转子泵燃油喷注系统DI 分电式点火系统DM诊断模块DMNL 诊断手册DSC车距车速控制DSV 驾驶认可关闭气门DTC诊断故障代码DWR 距离警报雷达EA 电子控制加速器EFI [electronic] 连续式燃油喷注系统[电子] continuous fuel injection system [electronic] EATC 电子自动控制变速箱EBR 发动机拖动扭矩调节ECL 发动机冷却液位ECM子发动机控制模块ECT 发动机冷却液温度EDC 电子柴油发动机控制EDR 电子柴油发动机调整EDS 电控柴油发动机系统EGR 废气循环EHD 电子控制高压柴油喷注系统EIS 电子点火开关EL 外部照明ELA 车身高度调整EMSC 电动后视镜电动方向盘调节加热后视镜EPC 电子电能控制RAS 后桥转向RB 翻车保护杆RCL 遥控中央门锁RD 收音机REST 发动机余执利用系统RFL 无线电遥控中央锁止系统RH 折合式硬顶篷车RHR 折合式后座头枕RHS 右方向盘RPM 发动机转速RST 软顶敞篷车RTG 可伸缩行李箱把手RTR 遥控开启行李箱盖SAM 信号采集及促动控制SBC 感应式刹车SBE 安全带延伸臂SLO 启动锁止SMS 维修微缩胶片系统SOUND-BOSE牌音响系统SPS 速度感应助力转向SR 倾斜/滑动天窗STH 辅助暖气系统SRS 辅助防护系统SVMCM 特种多功能控制模组TAL 行李箱辅助锁TB 节流阀体TC 废气涡轮增压TCM 变速箱控制模组TD 速率信号TDC 上至点TEL 电话TELEAID 自动紧急求助电话系统TEMPMA TIC A/C 空调[手动恒温]TIC 晶体管点火系统TL 辅助暖气遥控启动TN 发动机转速信号TPM 轮胎气压监测器TPC 轮胎气压控制TRAP 碳烟燃尽滤清器TRIP 行程计算机TS 防拖车警报系统TSL 极速限制[控制汽油泵LHS 左方向盘LH-SFI 热丝式多端顺序燃油喷注系统LIM 巡航变速限制器LOC 低压缩比LS 扩音器系统LSA 音响系统分部MAF 空气质量流量传感器MAP 歧管绝对压力MCS 多种仿型座椅ME-SFI 电控多端顺序燃油喷注点火系统MFC 多功能控制模组MIL 故障显示灯MSC 后视镜方向盘调节加热后视镜MT 手动变速箱MV A 进歧管辅助真空装置MWH 主线NAG 电子控制5速变速器O2S 氧气传感器OBD 内置诊断系统OC 氧化催化变换器OCP 车顶控制板OMS 运行监察系统OSB 多种仿型座椅/矫形椅靠背OUT 真空出口PA 驻车辅助PAS 客警报系统PEC 歧管压力计式燃油喷注点火系统PISI 气动怠速增加PL 伺服门锁系统PMP 进气歧管局部热器PNP 驻车排档空挡位置PPG 测试模组程序位置PROX 防撞警报PS 助力转向PSE 气动控制单元PTS 驻车控制单元PW 电动车窗PWM 脉冲宽度调制EPS 电子动力换档ESA 座椅电动调整ESC 转向柱电动调整ESCM 发动机系统控制模块ESP 电控车辆稳定行驶系统ETC 电子自动变速箱控制ETR 安全带拉紧器ETS 电子牵引辅助系统EV AP 燃油挥发排放控制装置EVN 伸延讯息联网系统FAN 高音喇叭FFS 车架地板总成FP 燃油泵FTC 前轮驱动变速箱控制GIM 基准脉冲波检验GPS 卫星坐标定位系统GVN 总体网络HCS 大灯清洁系统HEAT 自动采暖装置HFM-SFI 热膜式多点顺序燃油喷注点火系统HFS [电话机]免提装置HHT 手提测仪HORN喇叭信号系统HPS 气液压悬挂HRS后座椅加热HS 座椅加热IAC 怠速进气控制IAT 进所气温度IC 仪表ICL 内部中央门锁ICS 信息及通讯系统IDC 仪表板内部控制器IFI 直列泵煤燃油喷注IMM 防启动装置IMS 车内活动传感器IR 红外线IRCL 红外线遥控中央门锁ISC 怠速自动调节KG 卡片式无匙启动功能KLA 自动恒温控制系统KS 爆震传感器KSS防爆震控制系统LCP 低位控制板TV 电视调谐器TVV油箱蒸汽阀TWC三元催化转换器V AC真空进气V AF 空气容积流量V AS音控电动系统VCS音控控制系统VIN 底盘编号VR 折叠式硬篷VSS 车速信号WOT节流阀全开ZUH 暖气增压器如下主要是德文缩写MBC 刹车主缸4MATIC 4-轮子驱动自动控制器AB 安全气袋ABC 活动车身控制器ABL 外部灯光ABS 防抱死制动系统ABW 间隔报警器ADS 自动减震装置AFE 车道自动识别装置AG(A T) 自动变速器AHV 拖车挂接装置AKR 爆震传感器系统AKSE 自动控制孩子座识别器ALDA 进气增压调整APS 自动导航系统EGR 废气再循环ARMIN 安全气袋带综合紧急传呼系统AS 牵引传感器ASA 后视镜自动变光装置ASD 差速器自动锁定装置ASF(DSV)驾驶授权系统截流阀SEQASR 加速防滑调节ATS天线系统AWR 距离警告雷达BAS刹车辅助CAN控制区域网CDI柴油喷射CDC CD换盘器CNS通讯和导航系统COMAND驾驶室信息和数据显示器系统CV活动软车顶D2B光纤通信OCP舱顶操纵板控制模块DH(DMAN)诊断手册DTR定速巡航控制E-call 紧急传呼系统ECI电子点火控制器EDR电子柴油喷射调节EDS电子柴油喷射系统ATA防盗报警系统EFH电动车窗EA电子加速器ETC电子变速器控制器EHD电子高压柴油喷射系统ELR电子怠速控制装置ELC电子水平控制器EPC电子油门控制器IFI柴油机喷射系统ESL转向柱调整和后视镜加热ESP电子稳定性程序ESV座椅调整ETS电子牵引控制DFI柴油机喷射系统EVL(EASlg)转向柱调节ESN(EWM)电子换档杆模块EIS电子点火/起动机开关控制模块FAN喇叭系统DAS驾驶授权系统RFL收音机频率锁住FFZ/IFZ(RFL/RCL)收音机频率锁住/中央遥控锁住FG功能组合HFS手动释放系统FUG功能分组GES(VSS)车辆速度信号BM电源电脑GPS全球定位系统GUB(SBE)安全带扩张器GUS(ETR)紧急伸展收缩装置HAL后轴转向HEA T自动加热器装置HDF(RTR)车尾行李箱盖遥控打开HDFS(RTC)遥控的车尾行李箱盖关闭HFM-SFI燃料喷射和点火系统HHS加热后窗玻璃HHT手提式检测器HZS(TAL)车尾行李盖辅助锁住ICS信息和通信系统IFZ(RCL)红外线遥控是央锁住IR红外线IRS(IMS)内部运动传感器C-AAC方便自动空调装置KAF-(RHR)后端罩限制降下TWC催化反应器KFB方便部件KG无钥匙驾驶系统KI仪表板AAC自动空调装置KLS装有空气调节器座KSG(SEQ)容易换档手动变速器KW曲柄转角LDH叠层车顶LH-SFI LH-SFI燃料喷射系统LHS[LL]左手转向LLR怠速控制装置HSW方向盘加热器LS[PS]动力转向装置LSA[LS]扬声器系统HRA头灯距离调整MAS发动机系统控制模块ME ME燃料喷射和点火系统MG(MT)手动变速器MKL(OSB)可调节座椅靠背MKS(MCS)多轮廓座MRA残余发动机热量利用系统SCM转向柱模块MRS发动机制动调节EBR特种车辆多功能控制模块SVMCM特种车辆多功能控制模块NV低压OBD诊断CCP上控制面板OMS操作监测系统OSL矩形座靠背OT上死点PE电路图PLA(PISI)进气怠速增加SPS对速度变化敏感的动力转向装置PMS燃料喷射和点火系统PSE气动系统PSV(PMP)局部进气歧管预热器PTS停车防撞系统RA(SMS)保养缩微胶片系统RBA(FFS)车架底盘系统TPM轮胎气压监测器RDS无线电数据系统RDU(TPM)轮胎气压监测器BA倒车辅助RHS右手方向RRE(TRIP)行程计算机RV改型版本RS双门篷车软车顶SA专用设各种备SAM信号采集和传动模块SBC刹车自动控制SBL座椅通风VCS声音-触发控制系统SHD倾斜/活动车顶SHI辅助关闭HRS后座加热HS座位加热CCM多功能控制模块SRA(HCS)头灯清洗系统SRS辅助约束系统安全气囊SRU(MA V)真空辅助歧管STH静止加热器SVS(PL)电源继电器TAC进气温度TD发动机转速信号CTEL电话TELEAID电话紧急求救信息系统TN EZL/AKR转速信号CC巡航控制TSG(DCM)门控制模块TURBO(TC)涡轮增压器TV电视调谐器LCP下部控制面板URB(RB)开逢控制B(RB)开逢控制UT(BDC)下死点RSC开逢控制VR天窗VHG车尾行李盖手柄凹部WFS(IMM)晶电钥匙系统WIS车间信息系统ZAE(CTU)中央触发器(安全气袋)ZAS汽缸切断ZUH加热增强器ZV中央锁GRM-gear recognition module 档位开关(波棍168之A160使用)Crankshaft 曲轮camshaft 凸轮轴中央门锁泵真空管颜色区别和功能缩写黑色尾箱盖拉手SFG;(小)白色尾箱锁释放KAF;(大)透明色空调分配总成SRU;灰色座椅;黄色全车锁(FT、TK是四门锁;HD是尾箱锁;BFT/FondI油箱盖)。
基于单片机的倒车防撞预警系统设计
基于单片机的倒车防撞预警系统设计倒车防撞预警系统是一种广泛应用于汽车上的辅助设备,可以帮助驾驶员在倒车过程中避免与障碍物发生碰撞。
本文将介绍一个基于单片机的倒车防撞预警系统的设计。
一、系统设计方案1.硬件设计部分:(1)超声波传感器:用于检测倒车车辆后方距离的变化,一般使用多个超声波传感器进行检测。
(2) 单片机(如Arduino):用于接收超声波传感器的信号并进行处理,同时控制显示器和蜂鸣器发出预警信号。
(3)显示器:用于显示倒车车辆后方的障碍物距离,可以使用LCD显示屏。
(4)蜂鸣器:用于发出声音预警信号,提醒驾驶员注意。
2.软件设计部分:(1)超声波传感器信号处理:单片机接收超声波传感器的信号,并进行滤波和幅值处理,得到障碍物距离值。
(2)倒车距离显示:将障碍物距离值显示在LCD屏幕上,可以设计多级警戒区,显示不同距离范围内的预警信息。
(3)声音预警:当距离过近时,单片机控制蜂鸣器发出声音预警信号,提醒驾驶员注意。
二、系统实现步骤1.硬件实现:(1)连接超声波传感器:按照超声波传感器的规格书连接传感器与单片机。
(2)连接LCD显示屏:将LCD显示屏连接到单片机。
(3)连接蜂鸣器:将蜂鸣器连接到单片机。
2.软件实现:(1)单片机初始化:初始化单片机,设置IO口的输入输出模式和引脚功能。
(2)读取超声波传感器信号:通过IO口读取超声波传感器的信号,并进行幅值处理,得到障碍物距离值。
(3)显示距离信息:将障碍物距离值显示在LCD显示屏上,可以设计多级警戒区,显示不同距离范围内的预警信息。
(4)发出声音预警信号:当距离过近时,单片机控制蜂鸣器发出声音预警信号,提醒驾驶员注意。
三、系统测试和优化1.测试:将倒车防撞预警系统连接到倒车车辆上,进行实际测试。
测试过程中要注意校准超声波传感器和LCD显示屏的正确读数,以及蜂鸣器声音的预警效果。
2.优化:根据实际测试结果优化系统设计,可考虑加入其他传感器,如摄像头等,提高系统的准确性和可靠性。
用于车载测高雷达的圆极化阵列天线设计
用于车载测高雷达的圆极化阵列天线设计汪坤;廖欣;姜兴;袁亚超;杨明【摘要】为实现车辆对前方目标高度的探测,设计了一款用于24 GHz车载测高防撞雷达的高增益、低副瓣一发两收圆极化微带阵列天线.该天线采用方形贴片切角的方式实现圆极化特性,同时采用道尔夫-切比雪夫综合算法设计串并联混合馈电网络,使该圆极化微带阵列天线实现高增益、低副瓣的特性.实测与仿真结果基本吻合,该圆极化阵列天线在24~24.25 GHz频带,反射系数小于-12 dB,轴比均小于3 dB.在中心频率24.125 GHz处,该10×4元发射天线与10×2元接收天线的增益分别为22.5 dB和19.5 dB,方位面旁瓣电小于-20 dB,且3 dB波束宽度均为9°左右,满足设计要求.【期刊名称】《桂林电子科技大学学报》【年(卷),期】2019(039)002【总页数】6页(P113-118)【关键词】圆极化;高增益;低副瓣;微带天线【作者】汪坤;廖欣;姜兴;袁亚超;杨明【作者单位】桂林电子科技大学信息与通信学院,广西桂林 541004;桂林电子科技大学信息与通信学院,广西桂林 541004;桂林电子科技大学信息与通信学院,广西桂林 541004;桂林电子科技大学信息与通信学院,广西桂林 541004;桂林电子科技大学信息与通信学院,广西桂林 541004【正文语种】中文【中图分类】TN828随着中国经济的快速发展,高速公路路况也越来越复杂,限高杆、广告牌安装较为混乱,车辆与限高杆、山洞、广告牌等相撞造成的事故也频频发生,随着新的交通事故的出现,车辆防撞技术不仅要探测前方障碍物的距离、速度信息,还要兼顾探测路面上方存在安全隐患的障碍目标。
因此,研究设计兼顾测距测速的车载测高防撞雷达显得尤为重要。
由于微带天线具有体积小、质量轻、易集成的特点,因而车载防撞雷达天线大多采用微带阵列天线[1-2]。
目前,车载防撞雷达前端天线基本上都采用线极化的方式设计。
汽车智能防撞系统
汽车智能防撞系统汽车智能防撞系统是指一套基于现代计算机技术和感知技术,能够在汽车行驶过程中实时监测道路情况,预测潜在危险,并采取相应措施避免碰撞的系统。
它是车辆主动安全系统的核心部分,能够大大提升驾驶者和乘客的安全性。
汽车智能防撞系统主要由传感器、控制单元和执行器三部分组成。
传感器主要用于收集道路和车辆信息,包括雷达、摄像头和激光雷达等。
控制单元负责处理传感器所获得的信息,并进行危险预警和预测,确定合适的措施来避免碰撞。
执行器则根据控制单元的指令,控制车辆的刹车、转向等动作以避免碰撞。
汽车智能防撞系统基于现代计算机技术和人工智能技术,能够准确判断道路情况和潜在危险,比如前方车辆的距离和速度、行人的位置等。
当系统判断存在碰撞危险时,会通过警报和报警器提醒驾驶者,同时自动采取控制措施,如自动刹车或自动转向等,保证车辆安全。
汽车智能防撞系统的效果在很大程度上取决于传感器的准确性和敏感性。
现代汽车智能防撞系统采用多种传感器的组合,以提高系统的准确性和可靠性。
激光雷达可以提供非常精确的距离测量,摄像头可以识别车辆和行人,雷达可以检测周围车辆的速度和方向等等。
这些传感器通过数据融合技术,将各自的信息进行整合和处理,得出最终的判断结果。
随着智能科技的不断进步,汽车智能防撞系统越来越智能化和自动化。
近年来出现了基于人工智能技术的自主驾驶汽车,这些汽车通过深度学习等技术,能够实现全自动驾驶,进一步提升了驾驶安全性。
汽车智能防撞系统是通过集成多种传感器和计算机技术,提供实时监测和预警服务的系统,能够大大提升驾驶者和乘客的安全性。
随着科技的进步和智能化水平的提高,汽车智能防撞系统的功能将会不断升级,为驾驶者带来更加安全和便利的驾驶体验。
mdvr车辆防碰撞预警系统方案
mdvr车辆防碰撞预警系统方案简介MDVR车辆防碰撞预警系统是一种基于监控技术和智能算法的车辆防撞预警系统,它可以通过高清车载摄像头进行实时监控,利用智能算法进行数据分析,从而准确识别车辆碰撞的风险,提醒驾驶员采取相应的行动,以避免车辆碰撞事故的发生。
技术原理MDVR车辆防碰撞预警系统主要基于以下技术原理进行设计和实现:1. 高清车载摄像头MDVR车辆防碰撞预警系统采用高清车载摄像头进行实时监控。
高清车载摄像头具备高清晰度、广角度、夜视功能等特点,可以有效地提高驾驶员观测车辆周边的能力,识别并记录车辆碰撞的情况。
2. 智能算法识别车辆碰撞风险MDVR车辆防碰撞预警系统采用先进的智能算法识别车辆碰撞风险。
该算法能够通过车载摄像头捕捉的视频流数据进行实时分析,并通过图像识别、目标追踪等计算机视觉算法,精准地识别出车辆碰撞风险,判断是否需要发出预警信息。
3. 发出驾驶员预警信息MDVR车辆防碰撞预警系统能够及时发出驾驶员预警信息。
当系统识别到车辆出现碰撞风险时,会向驾驶员发出语音、振动等信息预警,提醒驾驶员采取相应的行动,以避免车辆碰撞事故的发生。
方案特点MDVR车辆防碰撞预警系统具有以下特点:1. 支持多种警告方式MDVR车辆防碰撞预警系统能够支持多种警告方式,如语音、振动等方式进行预警,提醒驾驶员采取相应的行动。
2. 精准识别碰撞风险MDVR车辆防碰撞预警系统采用先进的智能算法,能够精准地识别车辆碰撞风险,可有效降低车辆碰撞事故的发生率。
3. 易于安装和使用MDVR车辆防碰撞预警系统易于安装和使用。
只需要将系统中的摄像头固定在车辆上即可,驾驶员可通过系统进行实时监控和预警操作。
应用场景MDVR车辆防碰撞预警系统适用于各种类型的车辆,在以下场景中应用效果尤佳:1. 工地运输卡车工地运输卡车在运输过程中需要通过道路的大规模交通,驾驶员在视线受阻或者交通拥堵的时候,十分容易发生车辆碰撞的危险。
MDVR车辆防碰撞预警系统可以有效地提高驾驶员识别与控制碰撞风险的能力。
轿车的雷达防撞技术
轿车的雷达防撞技术雷达技术早在第二次世界大战中,已经被广泛用於探测敌方飞机、舰船和坦克等军事目标的距离。
在轿车上的应用则以奔驰轿车为先。
除了雷达以外,超声波、红外线、激光和视频等技术均可以用於汽车防撞。
不过,在长距离探测能力、目标鉴别能力、排除虚惊能力、黑暗穿透能力、适应温度变化能力、全天候穿透能力、在灰尘/烟雾笼罩下的传感器性能等方面,雷达技术均有明显的优越性;在硬件成本和信号处理成本方面,也明显低於其他技术,所以雷达测距防撞技术终於被汽车造厂家选中。
例如奔驰220型系列S级轿车(图1)便采用了雷达测距防撞技术。
雷达测距防撞技术是一种主动的安全措施,其任务包括:保持所选车速(巡航控制功能),并控制与前车的距离;控制可变车速限制器和可编程的固定车速限制器;在控制仪板上把信息和警报信号发给驾驶员。
雷达测距防撞控制系统(Distronic,简称DTR)的组成部件包括:DTR雷达控制模块、DTR雷达传感器、具有距离测量电位差计和警报信号消除开关的DTR开关座、可变巡航控制(CC)开关、仪板上的显示装置及警报信号发布装置和各种控制机构之间的信息联络网(CAN)。
一般巡航控制在交通稠密的情况下不能使用,而DTR雷达测距防撞控制系统借助装在水箱栅栏前的DTR雷达传感器探测车前的交通情况。
如果车子接近另一辆车速较低的前车,就会自动降低车速。
DTR雷达测距防撞控制系统计算必须与前车保持的距离,并通过各控制机构之间的信息联络网(CAN),执行以下操作:通过车辆稳定行驶系统(ESP)或加速防滑控制(ASR)模块,增大和减小发动机扭矩;通过车辆稳定行驶系统(ESP)或加速防滑控制(ASR)模块,进行制动;通过电子控制变速箱进行换档。
DTR适用的车速围为40-160km/h。
在此围内,如果车前没有其他车辆,则和一般巡航控制系统的作用一样。
如果DTR控制开关因故障而自行关闭,或由於车速超过上述围,驾驶员便会听到声音警报信号,他可以借助距离测量电位差计改变与前车的距离。
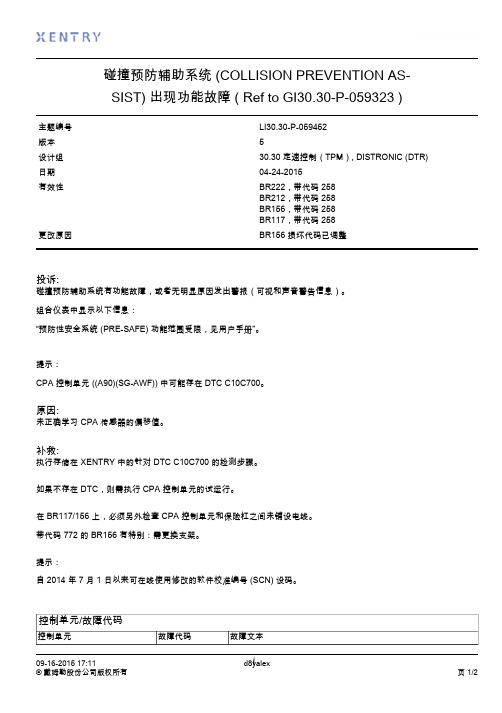
碰撞预防辅助系统 出现功能故障
零件
零件号 A 156 885 22 56
ES1 ES2 名称 支架
“防碰撞辅助系统”控制单元存在功能故障。 雷达测距传感器失调。 “防碰撞辅助系统”控制单元存在功能故障。 雷达测距传感器失调。
数量 1
提示
EPC X
操作号/损坏代码
操作号
操作内容
时间
损坏代码 54W10 90 5412W 90 54W10 90
投诉:
碰撞预防辅助系统有功能故障,或者无明显原因发出警报(可视和声音警告信息)。 组合仪表中显示以下信息: “预防性安全系统 (PRE-SAFE) 功能范围受限,见用户手册”。
提示: CPA 控制单元 ((A90)(SG-AWF)) 中可能存在 DTC C10C700。
原因:
未正确学习 CPA 传感器的偏移值。
控制单元/故障代码
控制单元
09-16-2015 17:11 © 戴姆勒股份公司版权所有
故障代码
故障文本 d8yalex
页 1/2
A90 - 控制单元'防撞辅助系 统' (SБайду номын сангаас-AWF) (FCW246) (CLA(117),E 级(212), GLA(156))
C10C700
A90 - 控制单元'防撞辅助系 C10C700 统' (SG-AWF) (FCW222) (S 级 (222))
主题编号 版本 设计组 日期 有效性
更改原因
碰撞预防辅助系统 (COLLISION PREVENTION ASSIST) 出现功能故障 ( Ref to GI30.30-P-059323 )
LI30.30-P-059452 5 30.30 定速控制(TPM), DISTRONIC (DTR) 04-24-2015 BR222,带代码 258 BR212,带代码 258 BR156,带代码 258 BR117,带代码 258 BR156 损坏代码已调整
汽车车门防撞预警系统探测距离描述
汽车车门防撞预警系统探测距离描述随着汽车行业的不断发展和创新,车辆安全性能也得到了越来越多的关注。
其中,车门防撞预警系统是一项重要的安全装置。
该系统通过使用传感器来感知周围环境,并提供及时的警告,以避免车门与周围物体的碰撞。
而探测距离则是车门防撞预警系统中一个重要的参数,它决定了系统能够监测到的距离范围。
车门防撞预警系统的探测距离通常取决于所采用的传感器类型和技术。
目前市场上常用的传感器包括超声波传感器、红外线传感器和毫米波雷达传感器等。
这些传感器都有各自的特点和适用范围,因此在选择车门防撞预警系统时,需要根据实际需求来确定合适的传感器类型。
超声波传感器是一种常用于车门防撞预警系统的传感器。
它利用超声波的回波来测量与车门之间的距离。
超声波传感器具有响应速度快、精度高的优点,可以在短距离范围内准确地探测到周围物体。
然而,超声波传感器的探测距离通常较短,一般在几米以内。
红外线传感器是另一种常用于车门防撞预警系统的传感器。
它通过发射和接收红外线信号来测量与车门之间的距离。
红外线传感器具有探测距离较长和适应性强的优点,可以在较远距离内进行有效的探测。
然而,红外线传感器容易受到光线干扰,从而影响其准确性和可靠性。
毫米波雷达传感器是一种新兴的车门防撞预警系统传感器。
它利用毫米波的特性来测量与车门之间的距离。
毫米波雷达传感器具有高精度、高可靠性和适应性强的优点,可以在更远距离内进行精确的探测。
然而,毫米波雷达传感器的成本较高,目前主要应用于高端车型。
除了传感器类型,车门防撞预警系统的探测距离还受到其他因素的影响。
例如,传感器的安装位置、环境条件以及车辆本身的尺寸和造型等都会对探测距离产生影响。
因此,在选择和安装车门防撞预警系统时,需要综合考虑这些因素,并确保系统具有合适的探测距离。
车门防撞预警系统的探测距离是保障车辆安全的重要参数。
通过选择合适的传感器类型和技术,以及考虑其他因素的影响,可以确保车门防撞预警系统具有准确、可靠的探测距离。
pdc车距显示范围条件
pdc车距显示范围条件
PDC(Park Distance Control)是一种车辆停车距离控制系统,它通过传感器来检测车辆周围的障碍物,并向驾驶员发出警告以避
免碰撞。
PDC的显示范围条件通常取决于车辆制造商和具体型号的
设置,一般来说,它受到以下几个方面的影响:
1. 传感器类型和布置,PDC系统通常由多个超声波传感器组成,这些传感器安装在车辆前后侧,它们的布置和灵敏度会影响系统的
检测范围。
一些车型可能还会配备摄像头或雷达传感器来扩大检测
范围。
2. 障碍物的性质,PDC系统的显示范围还会受到检测到的障碍
物性质的影响,比如障碍物的形状、尺寸和材质等。
例如,PDC系
统可能对于柔软的物体或低矮的障碍物的检测范围会有所不同。
3. 驾驶员的视线和听觉,PDC系统通常会通过视觉或声音来向
驾驶员传达障碍物的距离和位置信息,因此驾驶员的视线和听觉也
会影响系统的有效范围。
总的来说,PDC系统的显示范围条件是一个综合考虑传感器布
置、障碍物性质以及驾驶员感知能力等因素的结果。
不同车型的PDC系统可能会有不同的显示范围条件,消费者在购车时可以根据自己的需求和对安全性能的要求来选择适合的PDC系统。
奔驰车距监控防撞系统(DTR)简介
随着汽车数量日益增多,车速愈来愈高,汽车交通事故也随之增多。
汽车相撞、撞人、撞障碍物、翻车、冲出公路等事故时有发生。
尤其高速公路上一旦出现撞车,就会造成多车相撞。
分析撞车原因,大致有:驾驶不慎,能见度不高,车速过快,车距过小或汽车本身故障等。
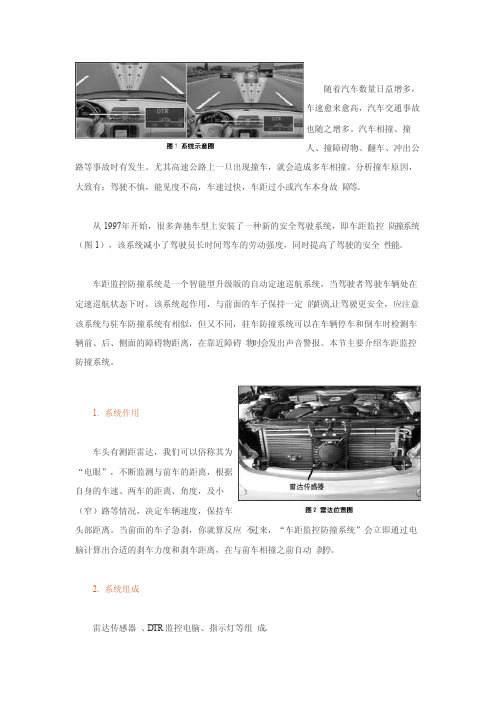
从1997年开始,很多奔驰车型上安装了一种新的安全驾驶系统,即车距监控防撞系统(图1),该系统减小了驾驶员长时间驾车的劳动强度,同时提高了驾驶的安全性能。
车距监控防撞系统是一个智能型升级版的自动定速巡航系统,当驾驶者驾驶车辆处在定速巡航状态下时,该系统起作用,与前面的车子保持一定的距离,让驾驶更安全,应注意该系统与驻车防撞系统有相似,但又不同,驻车防撞系统可以在车辆停车和倒车时检测车辆前、后、侧面的障碍物距离,在靠近障碍物时会发出声音警报。
本节主要介绍车距监控防撞系统。
1. 系统作用车头有测距雷达,我们可以俗称其为“电眼”,不断监测与前车的距离,根据自身的车速、两车的距离、角度,及小(窄)路等情况,决定车辆速度,保持车头部距离。
当前面的车子急刹,你就算反应不过来,“车距监控防撞系统”会立即通过电脑计算出合适的刹车力度和刹车距离,在与前车相撞之前自动刹停。
2. 系统组成雷达传感器、D TR 监控电脑、指示灯等组成。
3. 元件位置系统工作指示灯安装在仪表内,见图1。
雷达传感器一般安装在散热器上,具体位置如图2。
DTR电脑一般安装在防火墙正前或靠左侧,如图3。
4. 系统工作原理主要通过雷达传感器侦测前方障碍物距离车头的远近,当发现障碍物已达到可测范围(距离),则危险距离警告灯会依障碍物的实际距离亮起,当距离过近时,有些车型警告喇叭会“嘀嘀”响起,以警告驾驶者注意前方障碍物已经接近车体,同时DTR电脑会通过车身电脑网络CA N-BAS与发动机电脑、变速器电脑及E SP、ABS刹车系统电脑通讯,通过限制发动机输出转速,调节刹车作用力及变速箱挡位,控制定速巡航的车速。
解决方案车辆(无人机)智能防撞系统 ADAS
解决方案:车辆(无人机)智能防撞系统 /ADAS雷达测距防撞控制系统(Distronic,简称DTR)属于汽车主动安全装置,是当前国际汽车安全领域研究的热点之一。
主要实现3个功能防撞预警,辅助停车,盲点探测等汽车防碰撞技术首先需要解决的问题是汽车之间的安全距离。
汽车与汽车之间的距离小于安全距离,就应该能够自动报警,并采取制动措施。
目前,测定汽车之间安全距离的方法有三种:超声波测距、毫米波雷达测距和激光测距,防撞雷达系统装配在车辆的前方、侧方或者后方,完成前视防撞(防追尾碰撞)、侧视防撞(防更换车道时两车相撞)和后视防撞(防倒车时与车后阻碍物相撞)等侧重点各异的功能。
为完成上述功能所应达到的技术要求是系统应具有测距、测速、测角的功能。
【雷达测距控制系统的组成】DTR雷达控制模块DTR雷达传感器(激光雷达、毫米波雷达传感器)DTR电脑可变巡航控制(CC)开关DTR开关座(具有距离测量电位差计和警报信号消除开关)信息联络(CAN)(用于仪板上的显示装置及警报信号发布装置和各种控制机构的信息联络)天线、发射/接受组件中频信号处理装置电源及报警显示【雷达测距系统的组成框图】(1)射频收发前端是雷达系统的核心部件,负责信号调制.,射频信号的发射接收及接收信号解调, 麦通公司提供的微波模块负责该功能的实现,雷达推荐型号:MDU6220 (探测距离>100m), MDU4220 (探测距离>50m), MDU1100T (探测距离>20M)(2)信息处理模块自动分析,计算出与前方车辆间的距离和相对速度,并且防止转弯时错误测量临近车道车辆的情况发生(3)汽车控制装置:即控制汽车的自动操作系统,达到自动减速慢速行车,或紧急刹车。
通过限制发动机输出转速,调节刹车作用力及变速箱挡位,控制定速巡,航的车速(4)报警系统:安装在驾驶室前部,精确显示前方障碍物的距离值,面板上的数字键,可根据实际情况设定保京距离值,还有特殊输出接口,当系统报警时,该接口会输出TTL电平,可用于自动刹车开发【工作原理】在车辆行驶中,雷达窄波束向前发射电磁波信号,当发射信号遇到目标时,被反射回来被同一天线接收,经混频放大处理,可用其差拍信号间来表示雷达与目标的距离,再根据差频信号相差与相对速度关系,计算出目标对雷达的相对速度,微处理器将上述两个物理量代入危险时间函数数字模型后,既可算出危险时间,当危险程度达到各种不同等级时,分别输出报警信号或通过车辆控制电路去控制车速或刹车。
汽车智能防撞系统
汽车智能防撞系统随着交通事故的频繁发生,人们对交通安全的关注也与日俱增。
为了提高汽车的安全性能,智能防撞系统应运而生。
智能防撞系统是一种利用车载传感器和控制系统来监测和识别潜在碰撞的汽车安全装置,其目的是减少交通事故的发生,最大限度地减少碰撞的危害,保护车辆乘员和行人的生命安全。
智能防撞系统的工作原理是利用车载传感器和摄像头监测车辆周围的环境,包括车辆、行人、道路标识等,然后通过控制系统对这些信息进行分析和处理,从而及时预警驾驶员,并采取相应的措施来避免碰撞的发生。
智能防撞系统主要包括预碰撞警告系统、自动制动系统和车道偏离预警系统等功能。
预碰撞警告系统是智能防撞系统的核心部分,它通过车载传感器监测车辆周围的情况,并在发现潜在碰撞危险时,通过声音、光线或震动等方式及时预警驾驶员,并提供相应的建议或指示,让驾驶员能够及时采取措施来避免碰撞。
在某些系统中,预碰撞警告系统还可以自动制动系统结合使用,当驾驶员未能及时采取措施时,系统可以自动实施制动来减少碰撞的危害。
自动制动系统是另一个重要的功能模块,它可以根据车辆周围的情况,自动实施制动来避免碰撞的发生。
在发生潜在碰撞危险时,系统可以自动实施制动,从而减少碰撞的速度和危害,保护车辆乘员和行人的生命安全。
自动制动系统可以在驾驶员未能及时做出反应时发挥重要作用,有效地减少交通事故的发生。
车道偏离预警系统是智能防撞系统的另一个重要功能模块,它可以通过车载摄像头监测车辆的行驶轨迹,当发现车辆偏离行驶轨迹时,系统会及时预警驾驶员,并提出相应的建议或指示,让驾驶员及时采取措施来避免碰撞。
车道偏离预警系统可以有效地防止因为车辆偏离道路而导致的碰撞危险,提高车辆的安全性能。
在日常驾驶中,驾驶员和汽车乘客们应当始终保持警觉,并随时关注车辆周围的情况,遵守交通规则,减少不必要的风险。
虽然智能防撞系统具有很高的安全性能,但也不能完全依赖它,驾驶员仍需保持专注和警惕,合理控制车速和行驶轨迹,确保行车安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车距监控防撞系统DTR
随着汽车数量日益增多,车速愈来愈高,汽车交通事故也随之增多。
汽车相撞、撞人、撞障碍物、翻车、冲出公路等时有发生。
尤其高速公路上一旦出现撞车就会造成多车相撞。
分析撞车原因,大致有:驾驶不慎,能见度不高,车速过快,车距过小或汽车本身故障等。
从97年左右在车型上开始出现了一种新的安全驾驶系统,即车距监控防撞系统,该系统减小了驾驶员长时间驾车的劳动强度,同时提高了驾驶的安全性能。
车距监控防撞系统是一个智能型升级版的自动定速巡航系统,当驾驶者驾驶车辆处在定速巡航状态下时,该系统起作用,与前面的车子保持一定的距离,让驾驶更安全。
系统作用:车头有测距雷达,我们可以俗称其为“电眼”,不断监测与前车的距离,根据自
身的车速、两车的距离、角度,及小(窄)路等情况,决定车辆速度,保持车头部距离。
当前面的车子急刹,你就算反应不过来,“车距巡航系统”会立即通过电脑计算出合适的刹车力度和刹车距离,在与前车相撞之前自动刹停。
系统组成:雷达传感器、DTR监控电脑、指示灯、控制开关等组成。
米为限)则警告灯会熄灭。
这系统安放在散热器护栅里面, 内置的雷达传感器会控制制动器在必要时激活,让车子距离时刻保持在安全的设定值。
当车距再次增加时,车子便会加速至预设的速度。
仪表板显示屏会显示两辆车子及它们之间的车距。
如需紧急制动车子,还会有声响警告讯号响起。
三、DTR电脑及电脑插脚定义
4、雷达传感器:
信号测量:1号插脚1-4号脚电压V:20-24V
四、DTR电脑通讯网络
红外测距防撞系统作为标准配置的97款BENZ(奔驰)已出现在国内市场上,我们可以俗称其为“电眼”。
该系统包括的主要元件为:均匀安装在车体前部除保险杆上的六个红外测距感知器、仪表台上方向盘两侧的冷气出风口上面的两个危险距离警告灯、档位杆后侧斜面上的控制开关、危险距离警告喇叭、电脑控制总成。
该系统主要通过红外测距感知器侦测前方障碍物(高于1。
5m)距离车头的远近,当发现障碍物已达到可测范围(距离),则危险距离警告灯会依障碍物的实际距离亮起不同数量的格栅,当包含的所有格栅全部亮起时,则警告喇叭会“笛笛”响起,以警告驾驶者注意前方障碍物已经挨到车体。
当障碍物来自左侧,则方向盘左侧的警告灯会亮起。
若来自右侧,则右侧的警告灯会亮起。
若障碍物从下正前方来时,则方向盘两侧的警告灯就会同时亮起。
当把位于档位杆后控制开关置于“OFF”时,该系统则会停止工作。
在系统正常的情况下,KEY-ON,方向盘两侧的危险警告灯会同时亮起,里面的所有格栅灯也会亮起大约2秒钟后,若前方无障碍物(10米为限)则灯框里的所有格栅就会熄掉,只亮起周圈的灯框。
若系统不正常(电脑自我检测),则在KEY-ON 2秒后,所有的显示都会熄掉(KEY-ON 时,灯会亮起----若本身的警告灯控制回路就有问题,则灯不会亮),表明该系统有故障需要修理。
进厂维修的奔驰车正是出了上述的问题。
拆开前保险杆,得知前6个红外测距仪线插有三根线,其中一为电源线,一条为搭铁(这条线为六个传感器共同使用),一为信号线。
经9406表测试,六个传感器信号正常。
测试警告灯线路与开关线路,以及电源和搭换线路,都会正常。
这样基本上就可以确定为电脑故障。
更换电脑(该电脑位于车后座椅下右侧靠近中央门锁控制总成),再打开钥匙,系统开关打开,则系统恢复正常。