A DISCRETE FOURIER TRANSFORM BASED DIGITAL DTMF DETECTION ALGORITHM
专业英语翻译之数字信号处理
Signal processingSignal processing is an area of electrical engineering and applied mathematics that deals with operations on or analysis of signals, in either discrete or continuous time, to perform useful operations on those signals. Signals of interest can include sound, images, time-varying measurement values and sensor data, for example biological data such as electrocardiograms, control system signals, telecommunication transmission signals such as radio signals, and many others. Signals are analog or digital electrical representations of time-varying or spatial-varying physical quantities. In the context of signal processing, arbitrary binary data streams and on-off signalling are not considered as signals, but only analog and digital signals that are representations of analog physical quantities.HistoryAccording to Alan V. Oppenheim and Ronald W. Schafer, the principles of signal processing can be found in the classical numerical analysis techniques of the 17th century. They further state that the "digitalization" or digital refinement of these techniques can be found in the digital control systems of the 1940s and 1950s.[2]Categories of signal processingAnalog signal processingAnalog signal processing is for signals that have not been digitized, as in classical radio, telephone, radar, and television systems. This involves linear electronic circuits such as passive filters, active filters, additive mixers, integrators and delay lines. It also involves non-linear circuits such ascompandors, multiplicators (frequency mixers and voltage-controlled amplifiers), voltage-controlled filters, voltage-controlled oscillators andphase-locked loops.Discrete time signal processingDiscrete time signal processing is for sampled signals that are considered as defined only at discrete points in time, and as such are quantized in time, but not in magnitude.Analog discrete-time signal processing is a technology based on electronic devices such as sample and hold circuits, analog time-division multiplexers, analog delay lines and analog feedback shift registers. This technology was a predecessor of digital signal processing (see below), and is still used in advanced processing of gigahertz signals.The concept of discrete-time signal processing also refers to a theoretical discipline that establishes a mathematical basis for digital signal processing, without taking quantization error into consideration.Digital signal processingDigital signal processing is for signals that have been digitized. Processing is done by general-purpose computers or by digital circuits such as ASICs, field-programmable gate arrays or specialized digital signal processors (DSP chips). Typical arithmetical operations include fixed-point and floating-point, real-valued and complex-valued, multiplication and addition. Other typical operations supported by the hardware are circular buffers and look-up tables. Examples of algorithms are the Fast Fourier transform (FFT), finite impulseresponse (FIR) filter, Infinite impulse response (IIR) filter, and adaptive filters such as the Wiener and Kalman filters1.Digital signal processingDigital signal processing (DSP) is concerned with the representation of signals by a sequence of numbers or symbols and the processing of these signals. Digital signal processing and analog signal processing are subfields of signal processing. DSP includes subfields like: audio and speech signal processing, sonar and radar signal processing, sensor array processing, spectral estimation, statistical signal processing, digital image processing, signal processing for communications, control of systems, biomedical signal processing, seismic data processing, etc.The goal of DSP is usually to measure, filter and/or compress continuousreal-world analog signals. The first step is usually to convert the signal from an analog to a digital form, by sampling it using an analog-to-digital converter (ADC), which turns the analog signal into a stream of numbers. However, often, the required output signal is another analog output signal, which requires a digital-to-analog converter (DAC). Even if this process is more complex than analog processing and has a discrete value range, the application of computational power to digital signal processing allows for many advantages over analog processing in many applications, such as error detection and correction in transmission as well as data compression.[1]DSP algorithms have long been run on standard computers, on specialized processors called digital signal processors (DSPs), or on purpose-built hardware such as application-specific integrated circuit (ASICs). Today thereare additional technologies used for digital signal processing including more powerful general purpose microprocessors, field-programmable gate arrays (FPGAs), digital signal controllers (mostly for industrial apps such as motor control), and stream processors, among others.[2]2. DSP domainsIn DSP, engineers usually study digital signals in one of the following domains: time domain (one-dimensional signals), spatial domain (multidimensional signals), frequency domain, autocorrelation domain, and wavelet domains. They choose the domain in which to process a signal by making an informed guess (or by trying different possibilities) as to which domain best represents the essential characteristics of the signal. A sequence of samples from a measuring device produces a time or spatial domain representation, whereas a discrete Fourier transform produces the frequency domain information, that is the frequency spectrum. Autocorrelation is defined as the cross-correlation of the signal with itself over varying intervals of time or space.3. Signal samplingMain article: Sampling (signal processing)With the increasing use of computers the usage of and need for digital signal processing has increased. In order to use an analog signal on a computer it must be digitized with an analog-to-digital converter. Sampling is usually carried out in two stages, discretization and quantization. In the discretization stage, the space of signals is partitioned into equivalence classes and quantization is carried out by replacing the signal with representative signal of the corresponding equivalence class. In the quantization stage the representative signal values are approximated by values from a finite set.The Nyquist–Shannon sampling theorem states that a signal can be exactly reconstructed from its samples if the sampling frequency is greater than twice the highest frequency of the signal; but requires an infinite number of samples . In practice, the sampling frequency is often significantly more than twice that required by the signal's limited bandwidth.A digital-to-analog converter is used to convert the digital signal back to analog. The use of a digital computer is a key ingredient in digital control systems. 4. Time and space domainsMain article: Time domainThe most common processing approach in the time or space domain is enhancement of the input signal through a method called filtering. Digital filtering generally consists of some linear transformation of a number of surrounding samples around the current sample of the input or output signal. There are various ways to characterize filters; for example:∙ A "linear" filter is a linear transformation of input samples; other filters are "non-linear". Linear filters satisfy the superposition condition, i.e. if an input is a weighted linear combination of different signals, the output is an equally weighted linear combination of the corresponding output signals.∙ A "causal" filter uses only previous samples of the input or output signals; while a "non-causal" filter uses future input samples. A non-causal filter can usually be changed into a causal filter by adding a delay to it.∙ A "time-invariant" filter has constant properties over time; other filters such as adaptive filters change in time.∙Some filters are "stable", others are "unstable". A stable filter produces an output that converges to a constant value with time, or remains bounded within a finite interval. An unstable filter can produce an output that grows without bounds, with bounded or even zero input.∙ A "finite impulse response" (FIR) filter uses only the input signals, while an "infinite impulse response" filter (IIR) uses both the input signal and previous samples ofthe output signal. FIR filters are always stable, while IIR filters may be unstable.Filters can be represented by block diagrams which can then be used to derive a sample processing algorithm to implement the filter using hardware instructions. A filter may also be described as a difference equation, a collection of zeroes and poles or, if it is an FIR filter, an impulse response or step response.The output of a digital filter to any given input may be calculated by convolving the input signal with the impulse response.5. Frequency domainMain article: Frequency domainSignals are converted from time or space domain to the frequency domain usually through the Fourier transform. The Fourier transform converts the signal information to a magnitude and phase component of each frequency. Often the Fourier transform is converted to the power spectrum, which is the magnitude of each frequency component squared.The most common purpose for analysis of signals in the frequency domain is analysis of signal properties. The engineer can study the spectrum todetermine which frequencies are present in the input signal and which are missing.In addition to frequency information, phase information is often needed. This can be obtained from the Fourier transform. With some applications, how the phase varies with frequency can be a significant consideration.Filtering, particularly in non-realtime work can also be achieved by converting to the frequency domain, applying the filter and then converting back to the time domain. This is a fast, O(n log n) operation, and can give essentially any filter shape including excellent approximations to brickwall filters.There are some commonly used frequency domain transformations. For example, the cepstrum converts a signal to the frequency domain through Fourier transform, takes the logarithm, then applies another Fourier transform. This emphasizes the frequency components with smaller magnitude while retaining the order of magnitudes of frequency components.Frequency domain analysis is also called spectrum- or spectral analysis. 6. Z-domain analysisWhereas analog filters are usually analysed on the s-plane; digital filters are analysed on the z-plane or z-domain in terms of z-transforms.Most filters can be described in Z-domain (a complex number superset of the frequency domain) by their transfer functions. A filter may be analysed in the z-domain by its characteristic collection of zeroes and poles.7. ApplicationsThe main applications of DSP are audio signal processing, audio compression, digital image processing, video compression, speech processing, speech recognition, digital communications, RADAR, SONAR, seismology, and biomedicine. Specific examples are speech compression and transmission in digital mobile phones, room matching equalization of sound in Hifi and sound reinforcement applications, weather forecasting, economic forecasting, seismic data processing, analysis and control of industrial processes, computer-generated animations in movies, medical imaging such as CAT scans and MRI, MP3 compression, image manipulation, high fidelity loudspeaker crossovers and equalization, and audio effects for use with electric guitar amplifiers8. ImplementationDigital signal processing is often implemented using specialised microprocessors such as the DSP56000, the TMS320, or the SHARC. These often process data using fixed-point arithmetic, although some versions are available which use floating point arithmetic and are more powerful. For faster applications FPGAs[3] might be used. Beginning in 2007, multicore implementations of DSPs have started to emerge from companies including Freescale and Stream Processors, Inc. For faster applications with vast usage, ASICs might be designed specifically. For slow applications, a traditional slower processor such as a microcontroller may be adequate. Also a growing number of DSP applications are now being implemented on Embedded Systems using powerful PCs with a Multi-core processor.(翻译)信号处理信号处理是电气工程与应用数学领域,在离散的或连续时间域处理和分析信号,以对这些信号进行所需的有用的处理。
GPU平台二维快速傅里叶变换算法实现及应用
GPU平台二维快速傅里叶变换算法实现及应用张全;鲍华;饶长辉;彭真明【摘要】NVIDIA在其GPU平台上开发的FFT库CUFFT经过几次升级,但在二维FFT实现上效率还有提升空间,而且对于特定不能与上下文的计算融合,导致多次对Global memory的访问。
本文分析合并内存访问事务大小与占用率之间的关系,优化使用GPU存储器资源,对小数据量2次幂二维复数FFT在GPU上的实现进行改进,加速比最高达到CUFFT 6.5的1.27倍。
利用实数FFT结果的共轭对称性,算法的效率比复数FFT算法运算量降低了40%。
最后将FFT的改进应用到光学传递函数(OTF)的计算中,采用Kernel 融合的方法,使得OTF的计算效率比CUFFT计算方法提高了1.5倍。
%NVIDIA as the inventor of the GPU provides a library function CUFFT for computing Fast Fourier Transform (FFT). After several generations update of CUFFT, there is still promotion space and it is not suit for kernel fusing on GPU to reduce the memory access and increase the Instruction Level Parallelism (ILP). We develop our own custom GPU FFT implementation based on the well-known Cooley-Tukey algorithm. We analyze the relationship of coalesce memory access and occupancy of GPU and get the optimal configuration of thread block. The results show that the proposed method improved the computational efficiency by 1.27 times than CUFFT 6.5 for double complex data 512×512. And then it is used to the computation of OTF with kernel fusing strategy, and it improved the efficiency of computation about 1.5 times than conventional method using CUFFT.【期刊名称】《光电工程》【年(卷),期】2016(000)002【总页数】7页(P69-75)【关键词】快速傅里叶变换;CUDA;光学传递函数;图形处理器【作者】张全;鲍华;饶长辉;彭真明【作者单位】中国科学院自适应光学重点实验室,成都 610209; 电子科技大学光电信息学院,成都 610054; 中国科学院光电技术研究所,成都 610209; 中国科学院大学,北京 100049;中国科学院自适应光学重点实验室,成都 610209; 中国科学院光电技术研究所,成都 610209;中国科学院自适应光学重点实验室,成都610209; 中国科学院光电技术研究所,成都610209;电子科技大学光电信息学院,成都 610054【正文语种】中文【中图分类】TP391快速傅里叶变换(Fast Fourier Transform, FFT)是离散傅里叶变换的快速算法。
FFT

Fourier Transform
The Fourier Transform is defined by the expression: Forward Fourier Transform:
F ( k ) = ∫ f ( x )e − 2πikx dk
−∞
∞
Inverse Fourier Transform:
X =∑ f e
1 fn = N
N −1 k =0
The inverse DFT is given by:
∑X
k
e
2 πi kn N
Where wn
=e
2πi N
= cos(2π / N ) + i sin(2π / N ) is a primitive Nth root or unity.
DFT Computation
Fourier analysis
Fourier analysis is the representation of continuous function by a potentially infinite series of sin and cosine functions. It is grown out of the study of Fourier series. The Fourier series is a function which can be expressed as the sum of a series of sins and cosines.
14_Digital Signal Processing(数字信号分析)
© 2000 by CRC Press LLC 14Digital Signal Processing14.1 Fourier TransformsIntroduction •The Classical Fourier Transform for CT Signals •Fourier Series Representation of CT Periodic Signals •GeneralizedComplex Fourier Transform •DT Fourier Transform •Relationshipbetween the CT and DT Spectra •Discrete Fourier Transform14.2 Fourier Transforms and the Fast Fourier TransformThe Discrete Time Fourier Transform (DTFT)•Relationship to the Z-Transform •Properties • Fourier Transforms of Finite Time Sequences •Frequency Response of LTI Discrete Systems •The Discrete Fourier Transform •Properties of the DFT •Relation between DFT and Fourier Transform •Power, Amplitude, and Phase Spectra •Observations •Data Windowing •Fast Fourier Transform •Computation of the Inverse DFT14.3 Design and Implementation of Digital Filters Finite Impulse Response Filter Design •Infinite Impulse Response Filter Design •Finite Impulse Response Filter Implementation • Infinite Impulse Response Filter Implementation14.4 Signal Restoration Introduction •Attribute Sets: Closed Subspaces •Attribute Sets: Closed Convex Sets •Closed Projection Operators •AlgebraicProperties of Matrices •Structural Properties of Matrices •Nonnegative Sequence Approximation •Exponential Signals andthe Data Matrix •Recursive Modeling of Data W. Kenneth JenkinsIntroductionThe Fourier transform is a mathematical tool that is used to expand signals into a spectrum of sinusoidal components to facilitate signal analysis and system performance. In certain applications the Fourier transform is used for spectral analysis, or for spectrum shaping that adjusts the relative contributions of different frequency components in the filtered result. In other applications the Fourier transform is important for its ability to decompose the input signal into uncorrelated components, so that signal processing can be more effectively implemented on the individual spectral components. Decorrelating properties of the Fourier transform are important in frequency domain adaptive filtering, subband coding, image compression, and transform coding.Classical Fourier methods such as the Fourier series and the Fourier integral are used for continuous-time (CT) signals and systems, i.e., systems in which the signals are defined at all values of t on the continuum –¥< t < ¥. A more recently developed set of discrete Fourier methods, including the discrete-time (DT) Fourier transform and the discrete Fourier transform (DFT), are extensions of basic Fourier concepts for DT signals and systems. A DT signal is defined only for integer values of n in the range –¥ < n < ¥. The class of DT W. Kenneth JenkinsUniversity of IllinoisAlexander D. PoularikasUniversity of Alabama in Huntsville Bruce W. BomarUniversity of Tennessee SpaceInstitute L. Montgomery SmithUniversity of Tennessee SpaceInstitute James A. Cadzow Vanderbilt University© 2000 by CRC Press LLC Fourier methods is particularly useful as a basis for digital signal processing (DSP) because it extends the theory of classical Fourier analysis to DT signals and leads to many effective algorithms that can be directly implemented on general computers or special-purpose DSP devices.The Classical Fourier Transform for CT SignalsA CT signal s (t ) and its Fourier transform S (j w ) form a transform pair that are related by Eqs. (14.1) for any s (t ) for which the integral (14.1a) converges:(14.1a)(14.1b)In most literature Eq. (14.1a) is simply called the Fourier transform, whereas Eq. (14.1b) is called the Fourier integral . The relationship S (j w ) = F {s (t )} denotes the Fourier transformation of s (t ), where F { . } is a symbolic notation for the integral operator and where w is the continuous frequency variable expressed in radians per second. A transform pair s (t ) « S (j w ) represents a one-to-one invertible mapping as long as s (t ) satisfies conditions which guarantee that the Fourier integral converges.In the following discussion the symbol d (t ) is used to denote a CT impulse function that is defined to be zero for all t ¹ 0, undefined for t = 0, and has unit area when integrated over the range –¥ < t < ¥. From Eq.(14.1a) it is found that F {d (t – t o )} = e –j w t o due to the well-known sifting property of d (t ). Similarly, from Eq.(14.1b) we find that F –1{2pd (w – w o )} = e j w o t , so that d (t – t o ) « e –j w t o and e j w o t « 2pd (w – w o ) are Fourier transform pairs. By using these relationships, it is easy to establish the Fourier transforms of cos(w o t ) and sin(w o t ), as well as many other useful waveforms, many of which are listed in Table 14.1.The CT Fourier transform is useful in the analysis and design of CT systems, i.e., systems that process CT signals. Fourier analysis is particularly applicable to the design of CT filters which are characterized by Fourier magnitude and phase spectra, i.e., by |H (j w )| and arg H (j w ), where H (j w ) is commonly called the frequency response of the filter.Properties of the CT Fourier TransformThe CT Fourier transform has many properties that make it useful for the analysis and design of linear CT systems. Some of the more useful properties are summarized in this section, while a more complete list of the CT Fourier transform properties is given in Table 14.2. Proofs of these properties are found in Oppenheim et al. [1983] and Bracewell [1986]. Note that F { . } denotes the Fourier transform operation, F –1{ . } denotes the inverse Fourier transform operation, and “*” denotes the convolution operation defined as1.Linearity (superposition ):F {af 1(t ) + bf 2(t )} = aF {f 1(t )} + bF {f 2(t )}(a and b, complex constants)2.Time Shifting: F {f (t – t o )} = e –j w t o F {f (t )}3.Frequency Shifting: e j w o t f (t ) = F –1{F (j (w – w o ))}4.Time-Domain Convolution: F {f 1(t ) * f 2(t )} = F {f 1(t )}F {f 2(t )}5.Frequency-Domain Convolution: F {f 1(t )f 2(t )} = (1/2p )F {f 1(t )} * F {f 2(t )}6.Time Differentiation: –j w F (j w ) = F {d (f (t ))/dt }7.Time Integration: S j s t e dt j t w w ( )=()--¥¥òs t S j e d j t ()=( ) ( )-¥¥ò12p w w w f t f t f t t f t dt 1212()*()=-( )()-¥¥òF f t dt j F j F t ()ìíîüýþ=()()+ ()()¥ò–10w w p d w© 2000 by CRC Press LLCThe above properties are particularly useful in CT system analysis and design, especially when the system characteristics are easily specified in the frequency domain, as in linear filtering. Note that Properties 1, 6, and 7 are useful for solving differential or integral equations. Property 4 (time-domain convolution) provides the ——1——————a e k k jk t =¥+¥å–w 020p d w w a k k k -()=-¥+¥åa ke j tw 020pd w w -()a a k 110==, otherwise cos w 0tp d w w d w w -()++()[]00a a a k 11120===-, otherwisesin w 0t a aja k 11120=- ==-, otherwisex t ()=12pd w ()a a k k 01000==¹>,,()has this Forier series representationfor any choice of Td t nT n -()=-¥+¥åd t ()u t ()d t t -()0e j t -w 0e u t a at -() {}>,ete u t a at -() {}>,e© 2000 by CRC Press LLC basis for many signal-processing algorithms, since many systems can be specified directly by their impulse or frequency response. Property 3 (frequency shifting) is useful for analyzing the performance of communication systems where different modulation formats are commonly used to shift spectral energy among different frequency bands.Fourier Spectrum of a CT Sampled SignalThe operation of uniformly sampling a CT signal s (t ) at every T seconds is characterized by Eq. (14.2), where d (t ) is the CT impulse function defined earlier:(14.2)Definition SuperpositionSimplification if:(a) f (t ) is even(b) f (t ) is oddNegative tScaling:(a) Time(b) MagnitudeDifferentiation IntegrationTime shiftingModulation Time convolutionFrequency convolutionF j f t t dt F j j f t t dt w w w w ()=()()=()¥¥òò2200cos sin F f t F j -()=*()wF f t a F j e j a -()=()-w w F -¥¥()()[]=()-()ò112 12F j F j f f t d w w t t t –s t s t t nT s nT t nT a a n a n ()=()-( )=( )-( )=-¥¥=-¥¥ååd d© 2000 by CRC Press LLCSince s a (t ) is a CT signal, it is appropriate to apply the CT Fourier transform to obtain an expression for the spectrum of the sampled signal:(14.3)Since the expression on the right-hand side of Eq. (14.3) is a function of e j w T , it is customary to express the transform as F (e j w T ) = F {s a (t )}. It will be shown later that if w is replaced with a normalized frequency w¢ =w /T , so that –p < w¢ < p , then the right side of Eq. (14.3) becomes identical to the DT Fourier transform that is defined directly for the sequence s [n ] = s a (nT ).Fourier Series Representation of CT Periodic SignalsThe classical Fourier series representation of a periodic time domain signal s (t ) involves an expansion of s (t )into an infinite series of terms that consist of sinusoidal basis functions, each weighted by a complex constant (Fourier coefficient) that provides the proper contribution of that frequency component to the complete waveform. The conditions under which a periodic signal s (t ) can be expanded in a Fourier series are known as the Dirichlet conditions . They require that in each period s (t ) has a finite number of discontinuities, a finite number of maxima and minima, and that s (t ) satisfies the absolute convergence criterion of Eq. (14.4) [Van Valkenburg, 1974]:(14.4)It is assumed throughout the following discussion that the Dirichlet conditions are satisfied by all functions that will be represented by a Fourier series.The Exponential Fourier Series If s (t ) is a CT periodic signal with period T , then the exponential Fourier series expansion of s (t ) is given by(14.5a)where w o = 2p /T and where the a n terms are the complex Fourier coefficients given by(14.5b)For every value of t where s (t ) is continuous the right side of Eq. (14.5a) converges to s (t ). At values of t where s (t ) has a finite jump discontinuity, the right side of Eq. (14.5a) converges to the average of s (t –) and s (t +), whereFor example, the Fourier series expansion of the sawtooth waveform illustrated in Fig. 14.1 is characterized by T = 2p , w o = 1, a 0 = 0, and a n = a –n = A cos(n p )/(jn p ) for n = 1, 2, …. The coefficients of the exponential Fourier series given by Eq. (14.5b) can be interpreted as a spectral representation of s (t ), since the a n th coefficient represents the contribution of the (n w o )th frequency component to the complete waveform. Since the a n terms are complex valued, the Fourier domain (spectral) representation has both magnitude and phase spectra. For example, the magnitude of the a n values is plotted in Fig. 14.2 for the sawtooth waveform of Fig. 14.1. The fact that the a n terms constitute a discrete set is consistent with the fact that a periodic signal has a line spectrum ;F s t F s nT t nT s nT e a a n a j Tn n (){}=( )-( )ìíïîïüýïþï=( )[]=-¥¥-=-¥¥åådw s t a e n jn tn o ()==-¥¥åw a T s t e dt n n jn t T T o =( ) ()-¥< <¥--ò122w s t s t s t s t -®+®()=-( ) ()=+( )lim lim e e e e 00and© 2000 by CRC Press LLCi.e., the spectrum contains only integer multiples of the fundamental frequency w o . Therefore, the equation pair given by Eq. (14.5a) and (14.5b) can be interpreted as a transform pair that is similar to the CT Fourier transform for periodic signals. This leads to the observation that the classical Fourier series can be interpreted as a special transform that provides a one-to-one invertible mapping between the discrete-spectral domain and the CT domain.Trigonometric Fourier SeriesAlthough the complex form of the Fourier series expansion is useful for complex periodic signals, the Fourier series can be more easily expressed in terms of real-valued sine and cosine functions for real-valued periodic signals. In the following discussion it will be assumed that the signal s (t ) is real valued for the sake of simplifying the discussion. When s (t ) is periodic and real valued it is convenient to replace the complex exponential form of the Fourier series with a trigonometric expansion that contains sin(w o t ) and cos(w o t ) terms with corre-sponding real-valued coefficients [Van Valkenburg, 1974]. The trigonometric form of the Fourier series for a real-valued signal s (t ) is given by(14.6a)where w o = 2p /T . The b n and c n terms are real-valued Fourier coefficients determined byand(14.6b)FIGURE 14.1Periodic CT signal used in Fourier series example.FIGURE 14.2Magnitude of the Fourier coefficients for the example in Fig. 14.3.s t b n c n n n n n ()=( )+( )=¥=¥åå0001cos sin w w b T s t dt T T 0221=( ) ()-òb T s t n t dt n n T T =( ) () ( )=¼-ò212022cos , ,,w c T s t n t dt n n T T =( ) () ( )=¼-ò212022sin , ,,w© 2000 by CRC Press LLCAn arbitrary real-valued signal s (t ) can be expressed as a sum of even and odd components, s (t ) = s even (t ) +s odd (t ), where s even (t ) = s even (–t ) and s odd (t ) = –s odd (–t ), and where s even (t ) = [s (t ) + s (–t )]/2 and s odd (t ) = [s (t )– s (–t )]/2 . For the trigonometric Fourier series, it can be shown that s even (t ) is represented by the (even) cosine terms in the infinite series, s odd (t ) is represented by the (odd) sine terms, and b 0 is the dc level of the signal.Therefore, if it can be determined by inspection that a signal has a dc level, or if it is even or odd, then the correct form of the trigonometric series can be chosen to simplify the analysis. For example, it is easily seen that the signal shown in Fig. 14.3 is an even signal with a zero dc level. Therefore, it can be accurately represented by the cosine series with b n = 2A sin(p n /2)/(p n /2), n = 1, 2, …, as illustrated in Fig. 14.4. In contrast, note that the sawtooth waveform used in the previous example is an odd signal with zero dc level, so that it can be completely specified by the sine terms of the trigonometric series. This result can be demonstrated by pairing each positive frequency component from the exponential series with its conjugate partner; i.e., c n = sin(n w o t )= a n e jn w o t + a –n e –jn w o t , whereby it is found that c n = 2A cos(n p )/(n p ) for this example. In general, it is found that a n = (b n – jc n )/2 for n = 1, 2, …, a 0 = b 0, and a –n = a n *.The trigonometric Fourier series is common in the signal processing literature because it replaces complex coefficients with real ones and often results in a simpler and more intuitive interpretation of the results.Convergence of the Fourier SeriesThe Fourier series representation of a periodic signal is an approximation that exhibits mean-squared conver-gence to the true signal. If s (t ) is a periodic signal of period T and s ¢(t ) denotes the Fourier series approximation of s (t ), then s (t ) and s ¢(t ) are equal in the mean-squared sense if(14.7)Even when Eq. (14.7) is satisfied, mean-squared error (mse) convergence does not guarantee that s (t ) = s ¢(t )at every value of t . In particular, it is known that at values of t where s (t ) is discontinuous the Fourier series converges to the average of the limiting values to the left and right of the discontinuity. For example, if t 0 is apoint of discontinuity, then s ¢(t 0) = [s (t 0–)+ s (t 0+)]/2,where s (t 0–)and s (t 0+)were defined previously (note thatat points of continuity, this condition is also satisfied by the very definition of continuity). Since the Dirichlet conditions require that s (t ) have at most a finite number of points of discontinuity in one period, the set S t such that s (t ) ¹ s ¢(t ) within one period contains a finite number of points, and S t is a set of measure zero in the formal mathematical sense. Therefore, s (t ) and its Fourier series expansion s ¢(t ) are equal almost everywhere ,and s (t ) can be considered identical to s ¢(t ) for analysis in most practical engineering problems.FIGURE 14.3Periodic CT signal used in Fourier series example 2.FIGURE 14.4Fourier coefficients for example of Fig. 14.3.© 2000 by CRC Press LLCThe condition described above of convergence almosteverywhere is satisfied only in the limit as an infinite numberof terms are included in the Fourier series expansion. If theinfinite series expansion of the Fourier series is truncated toa finite number of terms, as it must always be in practicalapplications, then the approximation will exhibit an oscilla-tory behavior around the discontinuity, known as the Gibbsphenomenon [Van Valkenburg, 1974]. Let s N¢(t )denote a truncated Fourier series approximation of s (t ), where onlythe terms in Eq. (14.5a) from n = –N to n = N are includedif the complex Fourier series representation is used or whereonly the terms in Eq. (14.6a) from n = 0 to n = N are included if the trigonometric form of the Fourier series is used. It is well known that in the vicinity of a discontinuity at t 0 the Gibbs phenomenon causes s N¢(t )to be a poor approximation to s (t ). The peak magnitude of the Gibbs oscillation is 13% of the size of the jump discontinuity s (t 0–) –s (t 0+)regardless of the number of terms used in the approximation. As N increases, the region which contains the oscillation becomes more concentrated in the neighborhood of the discontinuity, until, in the limit as N approaches infinity, the Gibbs oscillation is squeezed into a single point of mismatch at t 0. The Gibbs phenom-enon is illustrated in Fig. 14.5, where an ideal low-pass frequency response is approximated by an impulse response function that has been limited to having only N nonzero coefficients, and hence the Fourier series expansion contains only a finite number of terms.If s ¢(t ) in Eq. (14.7) is replaced by s N ¢(t )it is important to understand the behavior of the error mse N as a function of N, where(14.8)An important property of the Fourier series is that the exponential basis functions e jn w o t (or sin(n w o t ) and cos(n w o t ) for the trigonometric form) for n = 0, ±1, ±2, … (or n = 0, 1, 2, … for the trigonometric form)constitute an orthonormal set ; i.e., t nk = 1 for n = k , and t nk = 0 for n ¹ k, where(14.9)As terms are added to the Fourier series expansion, the orthogonality of the basis functions guarantees that the error decreases monotonically in the mean-squared sense, i.e., that mse N monotonically decreases as N is increased. Therefore, when applying Fourier series analysis, including more terms always improves the accuracy of the signal representation.Fourier Transform of Periodic CT SignalsFor a periodic signal s (t ) the CT Fourier transform can then be applied to the Fourier series expansion of s (t )to produce a mathematical expression for the “line spectrum” that is characteristic of periodic signals:(14.10)The spectrum is shown in Fig. 14.6. Note the similarity between the spectral representation of Fig. 14.6 and the plot of the Fourier coefficients in Fig. 14.2, which was heuristically interpreted as a line spectrum. Figures 14.2 and FIGURE 14.5 Gibbs phenomenon in a low-pass digital filter caused by truncating the impulse response to Nterms.t T e e dtnk jn t jn t T T o o =( ) ( )( )--ò122w w F s t F a e a n n jn t n n o n o (){}=ìíïîïüýïþï=-( )=¥¥=-¥¥ååw p d w w 2© 2000 by CRC Press LLC14.6 are different, but equivalent, representations of the Fourier line spectrum that is characteristic of periodic signals.Generalized Complex Fourier TransformThe CT Fourier transform characterized by Eqs. (14.11a) and (14.11b) can be generalized by considering the variable j w to be the special case of u = s + j w with s = 0, writing Eqs. (14.11) in terms of u, and interpreting u as a complex frequency variable. The resulting complex Fourier transform pair is given by Eqs. (14.11a) and (14.11b):(14.11a)(14.11b)The set of all values of u for which the integral of Eq. (14.11b) converges is called the region of convergence,denoted ROC. Since the transform S (u ) is defined only for values of u within the ROC, the path of integration in Eq. (14.11a) must be defined by s so the entire path lies within the ROC. In some literature this transform pair is called the bilateral Laplace transform because it is the same result obtained by including both the negative and positive portions of the time axis in the classical Laplace transform integral. The complex Fourier transform (bilateral Laplace transform) is not often used in solving practical problems, but its significance lies in the fact that it is the most general form that represents the place where Fourier and Laplace transform concepts merge.Identifying this connection reinforces the observation that Fourier and Laplace transform concepts share common properties because they are derived by placing different constraints on the same parent form.DT Fourier TransformThe DT Fourier transform (DTFT) is obtained directly in terms of the sequence samples s [n ] by taking the relationship obtained in Eq. (14.3) to be the definition of the DTFT. By letting T = 1 so that the sampling period is removed from the equations and the frequency variable is replaced with a normalized frequency w¢= w T , the DTFT pair is defined by Eqs. (14.12). In order to simplify notation it is not customary to distinguish between w and w¢, but rather to rely on the context of the discussion to determine whether w refers to the normalized (T = 1) or to the unnormalized (T ¹ 1) frequency variable.(14.12a)(14.12b)FIGURE 14.6Spectrum of the Fourier representation of a periodic signal.s t j S u e du jut j j ()=()()-¥+¥ò12p s s s u s t e dt jut ()=()-¥¥ò–S e s n ej j n n ¢-¢=-¥¥()=[]åw w s n S e e d j jn []=()()¢¢¢-ò12p w w w p p© 2000 by CRC Press LLC The spectrum S (e j w¢) is periodic in w¢ with period 2p . The fundamental period in the range –p < w¢ £ p ,sometimes referred to as the baseband, is the useful frequency range of the DT system because frequency components in this range can be represented unambiguously in sampled form (without aliasing error). In much of the signal-processing literature the explicit primed notation is omitted from the frequency variable. However,the explicit primed notation will be used throughout this section because there is a potential for confusion when so many related Fourier concepts are discussed within the same framework.By comparing Eqs. (14.3) and (14.12a), and noting that w¢ = w T , we see that(14.13)where s [n ] = s (t )|t = nT . This demonstrates that the spectrum of s a (t ) as calculated by the CT Fourier transform is identical to the spectrum of s [n ] as calculated by the DTFT. Therefore, although s a (t ) and s [n ] are quite different sampling models, they are equivalent in the sense that they have the same Fourier domain represen-tation. A list of common DTFT pairs is presented in Table 14.3. Just as the CT Fourier transform is useful in CT signal system analysis and design, the DTFT is equally useful for DT system analysis and design.1. 12.3.4.5.6.7.8.9.10.11.d n[]d n n –0[]e j n -w 01-¥< <¥()n 22pd w p +()=-¥¥åkku n []x n n M []=££ìíî100,,otherwise e j nw 0220pd w w p -+()=-¥¥åk k cos w f 0n +()pd w w p d w w p f fe k e k j j k -+()+++()[]-=-¥¥å 0022F s t a (){}=[]{}DTFT s n© 2000 by CRC Press LLCIn the same way that the CT Fourier transform was found to be a special case of the complex Fourier transform (or bilateral Laplace transform), the DTFT is a special case of the bilateral z-transform with z = e j w¢t .The more general bilateral z -transform is given by(14.14a)(14.14b)where C is a counterclockwise contour of integration which is a closed path completely contained within the ROC of S (z ). Recall that the DTFT was obtained by taking the CT Fourier transform of the CT sampling model s a (t ). Similarly, the bilateral z -transform results by taking the bilateral Laplace transform of s a (t ). If the lower limit on the summation of Eq. (14.14a) is taken to be n = 0, then Eqs. (14.14a) and (14.14b) become the one-sided z -transform, which is the DT equivalent of the one-sided Laplace transform for CT signals.Properties of the DTFTSince the DTFT is a close relative of the classical CT Fourier transform, it should come as no surprise that many properties of the DTFT are similar to those of the CT Fourier transform. In fact, for many of the properties presented earlier there is an analogous property for the DTFT. The following list parallels the list that was presented in the previous section for the CT Fourier transform, to the extent that the same property exists. A more complete list of DTFT pairs is given in Table 14.4:1.Linearity (superposition): DTFT{af 1[n ] + bf 2[n ]} = a DTFT{f 1[n ]} + b DTFT{f 2[n ]}(a and b , complex constants)2.Index Shifting: DTFT{f [n – n o ]} = e –j w n o DTFT{f [n ]}3.Frequency Shifting: e j w o n f [n ] = DTFT –1{F (j (w – w o ))}4.Time-Domain Convolution: DTFT{f 1[n ] * f 2[n ]} = DTFT{f 1[n ]} DTFT{f 2[n ]}5.Frequency-Domain Convolution: DTFT{f 1[n ] f 2[n ]} = (1/2p )DTFT{f 1[n ]} * DTFT{f 2[n ]}6.Frequency Differentiation: nf [n ] = DTFT –1{dF (j w )/d w }Note that the time-differentiation and time-integration properties of the CT Fourier transform do not haveanalogous counterparts in the DTFT because time-domain differentiation and integration are not defined for DT signals. When working with DT systems practitioners must often manipulate difference equations in the frequency domain. For this purpose Property 1 (linearity) and Property 2 (index shifting) are important. As with the CT Fourier transform, Property 4 (time-domain convolution) is very important for DT systems because it allows engineers to work with the frequency response of the system in order to achieve proper shaping of the input spectrum, or to achieve frequency selective filtering for noise reduction or signal detection. Also,Property 3 (frequency shifting) is useful for the analysis of modulation and filtering common in both analog and digital communication systems.Relationship between the CT and DT SpectraSince DT signals often originate by sampling a CT signal, it is important to develop the relationship between the original spectrum of the CT signal and the spectrum of the DT signal that results. First, the CT Fourier transform is applied to the CT sampling model, and the properties are used to produce the following result:(14.15)S z s n z nn ()=[]-=-¥¥ås n j S z z dzn C[]=( ) ()-ò121p F s t F s t t nT S j F t nT a a n n (){}=()-( )ìíïîïüýïþï=( )( )-( )ìíïîïüýïþï=-¥¥=-¥¥ååd p w d 12。
专业英语词汇(信号与系统)

《信号与系统》专业术语中英文对照表第 1 章绪论信号(signal)系统(system)电压(voltage)电流(current)信息(information)电路(circuit)网络(network)确定性信号(determinate signal)随机信号(random signal)一维信号(one–dimensional signal)多维信号(multi–dimensional signal)连续时间信号(continuous time signal)离散时间信号(discrete time signal)取样信号(sampling signal)数字信号(digital signal)周期信号(periodic signal)非周期信号(nonperiodic(aperiodic)signal)能量(energy)功率(power)能量信号(energy signal)功率信号(power signal)平均功率(average power)平均能量(average energy)指数信号(exponential signal)时间常数(time constant)正弦信号(sine signal)余弦信号(cosine signal)振幅(amplitude)角频率(angular frequency)初相位(initial phase)周期(period)频率(frequency)欧拉公式(Euler’s formula)复指数信号(complex exponential signal)复频率(complex frequency)实部(real part)虚部(imaginary part)抽样函数Sa(t)(sampling(Sa)function)偶函数(even function)奇异函数(singularity function)- 奇异信号(singularity signal)单位斜变信号(unit ramp signal)斜率(slope)单位阶跃信号(unit step signal)符号函数(signum function)单位冲激信号(unit impulse signal)广义函数(generalized function)取样特性(sampling property)冲激偶信号(impulse doublet signal)奇函数(odd function)偶分量(even component)奇分量(odd component)正交函数(orthogonal function)正交函数集(set of orthogonal function)数学模型(mathematics model)电压源(voltage source)基尔霍夫电压定律(Kirchhoff’s voltage law(KVL))电流源(current source)连续时间系统(continuous time system)离散时间系统(discrete time system)微分方程(differential function)差分方程(difference function)线性系统(linear system)非线性系统(nonlinear system)时变系统(time–varying system)时不变系统(time–invariant system)集总参数系统(lumped–parameter system)分布参数系统(distributed–parameter system)偏微分方程(partial differential function)因果系统(causal system)非因果系统(noncausal system)因果信号(causal signal)叠加性(superposition property)均匀性(homogeneity)积分(integral)输入–输出描述法(input–output analysis)状态变量描述法(state variable analysis)单输入单输出系统(single–input and single–output system)状态方程(state equation)输出方程(output equation)多输入多输出系统(multi–input and multi–output system)时域分析法(time domain method)变换域分析法(transform domain method)卷积(convolution)傅里叶变换(Fourier transform)拉普拉斯变换(Laplace transform)- 第 2 章连续时间系统的时域分析齐次解(homogeneous solution)特解(particular solution)特征方程(characteristic function)特征根(characteristic root)固有(自由)解(natural solution)强迫解(forced solution)起始条件(original condition)初始条件(initial condition)自由响应(natural response)强迫响应(forced response)零输入响应(zero-input response)零状态响应(zero-state response)冲激响应(impulse response)阶跃响应(step response)卷积积分(convolution integral)交换律(exchange law)分配律(distribute law)结合律(combine law)第3 章傅里叶变换频谱(frequency spectrum)频域(frequency domain)三角形式的傅里叶级数(trigonomitric Fourier series)指数形式的傅里叶级数(exponential Fourier series)傅里叶系数(Fourier coefficient)直流分量(direct composition)基波分量(fundamental composition)n 次谐波分量(n th harmonic component)复振幅(complex amplitude)频谱图(spectrum plot(diagram))幅度谱(amplitude spectrum)相位谱(phase spectrum)包络(envelop)离散性(discrete property)谐波性(harmonic property)收敛性(convergence property)奇谐函数(odd harmonic function)吉伯斯现象(Gibbs phenomenon)周期矩形脉冲信号(periodic rectangular pulse signal)周期锯齿脉冲信号(periodic sawtooth pulse signal)周期三角脉冲信号(periodic triangular pulse signal)- 周期半波余弦信号(periodic half–cosine signal)周期全波余弦信号(periodic full–cosine signal)傅里叶逆变换(inverse Fourier transform)频谱密度函数(spectrum density function)单边指数信号(single–sided exponential signal)双边指数信号(two–sided exponential signal)对称矩形脉冲信号(symmetry rectangular pulse signal)线性(linearity)对称性(symmetry)对偶性(duality)位移特性(shifting)时移特性(time–shifting)频移特性(frequency–shifting)调制定理(modulation theorem)调制(modulation)解调(demodulation)变频(frequency conversion)尺度变换特性(scaling)微分与积分特性(differentiation and integration)时域微分特性(differentiation in the time domain)时域积分特性(integration in the time domain)频域微分特性(differentiation in the frequency domain)频域积分特性(integration in the frequency domain)卷积定理(convolution theorem)时域卷积定理(convolution theorem in the time domain)频域卷积定理(convolution theorem in the frequency domain)取样信号(sampling signal)矩形脉冲取样(rectangular pulse sampling)自然取样(nature sampling)冲激取样(impulse sampling)理想取样(ideal sampling)取样定理(sampling theorem)调制信号(modulation signal)载波信号(carrier signal)已调制信号(modulated signal)模拟调制(analog modulation)数字调制(digital modulation)连续波调制(continuous wave modulation)脉冲调制(pulse modulation)幅度调制(amplitude modulation)频率调制(frequency modulation)相位调制(phase modulation)角度调制(angle modulation)频分多路复用(frequency–division multiplex(FDM))时分多路复用(time–division multiplex(TDM))相干(同步)解调(synchronous detection)- 本地载波(local carrier)系统函数(system function)网络函数(network function)频响特性(frequency response)幅频特性(amplitude frequency response)相频特性(phase frequency response)无失真传输(distortionless transmission)理想低通滤波器(ideal low–pass filter)截止频率(cutoff frequency)正弦积分(sine integral)上升时间(rise time)窗函数(window function)理想带通滤波器(ideal band–pass filter)第 4 章拉普拉斯变换代数方程(algebraic equation)双边拉普拉斯变换(two-sided Laplace transform)双边拉普拉斯逆变换(inverse two-sided Laplace transform)单边拉普拉斯变换(single-sided Laplace transform)拉普拉斯逆变换(inverse Laplace transform)收敛域(region of convergence(ROC))延时特性(time delay)s 域平移特性(shifting in the s-domain)s 域微分特性(differentiation in the s-domain)s 域积分特性(integration in the s-domain)初值定理(initial-value theorem)终值定理(expiration-value)复频域卷积定理(convolution theorem in the complex frequency domain)部分分式展开法(partial fraction expansion)留数法(residue method)第 5 章策动点函数(driving function)转移函数(transfer function)极点(pole)零点(zero)零极点图(zero-pole plot)暂态响应(transient response)稳态响应(stable response)稳定系统(stable system)一阶系统(first order system)高通滤波网络(high-low filter)低通滤波网络(low-pass filter)- 二阶系统(second system)最小相移系统(minimum-phase system)维纳滤波器(Winner filter)卡尔曼滤波器(Kalman filter)低通(low-pass)高通(high-pass)带通(band-pass)带阻(band-stop)有源(active)无源(passive)模拟(analog)数字(digital)通带(pass-band)阻带(stop-band)佩利-维纳准则(Paley-Winner criterion)最佳逼近(optimum approximation)过渡带(transition-band)通带公差带(tolerance band)巴特沃兹滤波器(Butterworth filter)切比雪夫滤波器(Chebyshew filter)方框图(block diagram)信号流图(signal flow graph)节点(node)支路(branch)输入节点(source node)输出节点(sink node)混合节点(mix node)通路(path)开通路(open path)闭通路(close path)环路(loop)自环路(self-loop)环路增益(loop gain)不接触环路(disconnect loop)前向通路(forward path)前向通路增益(forward path gain)梅森公式(Mason formula)劳斯准则(Routh criterion)第 6 章数字系统(digital system)数字信号处理(digital signal processing)差分方程(difference equation)单位样值响应(unit sample response)卷积和(convolution sum)- Z 变换(Z transform)序列(sequence)样值(sample)单位样值信号(unit sample signal)单位阶跃序列(unit step sequence)矩形序列(rectangular sequence)单边实指数序列(single sided real exponential sequence)单边正弦序列(single sided exponential sequence)斜边序列(ramp sequence)复指数序列(complex exponential sequence)线性时不变离散系统(linear time-invariant discrete-time system)常系数线性差分方程(linear constant-coefficient difference equation)后向差分方程(backward difference equation)前向差分方程(forward difference equation)海诺塔(Tower of Hanoi)菲波纳西(Fibonacci)冲激函数串(impulse train)第7 章数字滤波器(digital filter)单边Z 变换(single-sided Z transform)双边Z 变换(two-sided (bilateral) Z transform)幂级数(power series)收敛(convergence)有界序列(limitary-amplitude sequence)正项级数(positive series)有限长序列(limitary-duration sequence)右边序列(right-sided sequence)左边序列(left-sided sequence)双边序列(two-sided sequence)Z 逆变换(inverse Z transform)围线积分法(contour integral method)幂级数展开法(power series expansion)z 域微分(differentiation in the z-domain)序列指数加权(multiplication by an exponential sequence)z 域卷积定理(z-domain convolution theorem)帕斯瓦尔定理(Parseval theorem)传输函数(transfer function)序列的傅里叶变换(discrete-time Fourier transform:DTFT)序列的傅里叶逆变换(inverse discrete-time Fourier transform:IDTFT)幅度响应(magnitude response)相位响应(phase response)量化(quantization)编码(coding)模数变换(A/D 变换:analog-to-digital conversion)- 数模变换(D/A 变换:digital-to- analog conversion)第8 章端口分析法(port analysis)状态变量(state variable)无记忆系统(memoryless system)有记忆系统(memory system)矢量矩阵(vector-matrix )常量矩阵(constant matrix )输入矢量(input vector)输出矢量(output vector)直接法(direct method)间接法(indirect method)状态转移矩阵(state transition matrix)系统函数矩阵(system function matrix)冲激响应矩阵(impulse response matrix)朱里准则(July criterion)。
Fourier Transform

Fourier transformIn mathematics, the Fourier transform is the operation that decomposes a signal into its constituent frequencies. Thus the Fourier transform of a musical chord is a mathematical representation of the amplitudes of the individual notes that make it up. The original signal depends on time, and therefore is called the time domain representation of the signal, whereas the Fourier transform depends on frequency and is called the frequency domain representation of the signal. The term Fourier transform refers both to the frequency domain representation of the signal and the process that transforms the signal to its frequency domain representation.More precisely, the Fourier transform transforms one complex-valued function of a real variable into another. In effect, the Fourier transform decomposes a function into oscillatory functions. The Fourier transform and its generalizations are the subject of Fourier analysis. In this specific case, both the time and frequency domains are unbounded linear continua. It is possible to define the Fourier transform of a function of several variables, which is important for instance in the physical study of wave motion and optics. It is also possible to generalize the Fourier transform on discrete structures such as finite groups. The efficient computation of such structures, by fast Fourier transform, is essential for high-speed computing.DefinitionThere are several common conventions for defining the Fourier transform of an integrable function ƒ: R→ C (Kaiser 1994). This article will use the definition:for every real number ξ.When the independent variable x represents time (with SI unit of seconds), the transform variable ξ representsfrequency (in hertz). Under suitable conditions, ƒ can be reconstructed from by the inverse transform:for every real number x.For other common conventions and notations, including using the angular frequency ω instead of the frequency ξ, see Other conventions and Other notations below. The Fourier transform on Euclidean space is treated separately, in which the variable x often represents position and ξ momentum.IntroductionThe motivation for the Fourier transform comes from the study of Fourier series. In the study of Fourier series, complicated functions are written as the sum of simple waves mathematically represented by sines and cosines. Due to the properties of sine and cosine it is possible to recover the amount of each wave in the sum by an integral. In many cases it is desirable to use Euler's formula, which states that e2πiθ = cos 2πθ + i sin 2πθ, to write Fourier series in terms of the basic waves e2πiθ. This has the advantage of simplifying many of the formulas involved and providing a formulation for Fourier series that more closely resembles the definition followed in this article. This passage from sines and cosines to complex exponentials makes it necessary for the Fourier coefficients to becomplex valued. The usual interpretation of this complex number is that it gives both the amplitude (or size) of the wave present in the function and the phase (or the initial angle) of the wave. This passage also introduces the need for negative "frequencies". If θ were measured in seconds then the waves e2πiθ and e−2πiθ would both complete one cycle per second, but they represent different frequencies in the Fourier transform. Hence, frequency no longer measures the number of cycles per unit time, but is closely related.There is a close connection between the definition of Fourier series and the Fourier transform for functions ƒ which are zero outside of an interval. For such a function we can calculate its Fourier series on any interval that includes the interval where ƒ is not identically zero. The Fourier transform is also defined for such a function. As we increase the length of the interval on which we calculate the Fourier series, then the Fourier series coefficients begin to look like the Fourier transform and the sum of the Fourier series of ƒ begins to look like the inverse Fourier transform. To explain this more precisely, suppose that T is large enough so that the interval [−T/2,T/2] contains the interval onis given by:which ƒ is not identically zero. Then the n-th series coefficient cnComparing this to the definition of the Fourier transform it follows that since ƒ(x) is zero outside [−T/2,T/2]. Thus the Fourier coefficients are just the values of the Fourier transform sampled on a grid of width 1/T. As T increases the Fourier coefficients more closely represent the Fourier transform of the function.Under appropriate conditions the sum of the Fourier series of ƒ will equal the function ƒ. In other words ƒ can be written:= n/T, and Δξ = (n + 1)/T − n/T = 1/T. where the last sum is simply the first sum rewritten using the definitions ξnThis second sum is a Riemann sum, and so by letting T → ∞ it will converge to the integral for the inverse Fourier transform given in the definition section. Under suitable conditions this argument may be made precise (Stein & Shakarchi 2003).could be thought of as the "amount" of the wave in the Fourier series of In the study of Fourier series the numbers cnƒ. Similarly, as seen above, the Fourier transform can be thought of as a function that measures how much of each individual frequency is present in our function ƒ, and we can recombine these waves by using an integral (or "continuous sum") to reproduce the original function.The following images provide a visual illustration of how the Fourier transform measures whether a frequency is present in a particular function. The function depicted oscillates at 3 hertz (if t measures seconds) and tends quickly to 0. This function was specially chosen to have a real Fourier transform which can easily be plotted. The first image contains its graph. In order to calculate we must integrate e−2πi(3t)ƒ(t). The second image shows the plot of the real and imaginary parts of this function. The real part of the integrand is almost always positive, this is because when ƒ(t) is negative, then the real part of e−2πi(3t) is negative as well. Because they oscillate at the same rate, when ƒ(t) is positive, so is the real part of e−2πi(3t). The result is that when you integrate the real part of the integrand you get a relatively large number (in this case 0.5). On the other hand, when you try to measure a frequency that is not present, as in the case when we look at , the integrand oscillates enough so that the integral is very small. The general situation may be a bit more complicated than this, but this in spirit is how the Fourier transform measures how much of an individual frequency is present in a function ƒ(t).Original function showingoscillation 3 hertz.Real and imaginary parts of integrand for Fourier transformat 3 hertzReal and imaginary parts of integrand for Fourier transformat 5 hertz Fourier transform with 3 and 5hertz labeled.Properties of the Fourier transformAn integrable function is a function ƒon the real line that is Lebesgue-measurable and satisfiesBasic propertiesGiven integrable functions f (x ), g (x ), and h (x ) denote their Fourier transforms by, , andrespectively. The Fourier transform has the following basic properties (Pinsky 2002).LinearityFor any complex numbers a and b , if h (x ) = aƒ(x ) + bg(x ), thenTranslationFor any real number x 0, if h (x ) = ƒ(x − x 0), thenModulationFor any real number ξ0, if h (x ) = e 2πixξ0ƒ(x ), then.ScalingFor a non-zero real number a , if h (x ) = ƒ(ax ), then. The case a = −1 leads to the time-reversal property, which states: if h (x ) = ƒ(−x ), then.ConjugationIf , thenIn particular, if ƒ is real, then one has the reality conditionAnd ifƒ is purely imaginary, thenConvolutionIf , thenUniform continuity and the Riemann–Lebesgue lemmaThe rectangular function is Lebesgue integrable.The sinc function, which is the Fourier transform of the rectangular function, is bounded andcontinuous, but not Lebesgue integrable.The Fourier transform of an integrable function ƒ is bounded and continuous, but need not be integrable – for example, the Fourier transform of the rectangular function, which is a step function (and hence integrable) is the sinc function, which is not Lebesgue integrable, though it does have an improper integral: one has an analog to thealternating harmonic series, which is a convergent sum but not absolutely convergent.It is not possible in general to write the inverse transform as a Lebesgue integral. However, when both ƒ and are integrable, the following inverse equality holds true for almost every x:Almost everywhere, ƒ is equal to the continuous function given by the right-hand side. If ƒ is given as continuous function on the line, then equality holds for every x.A consequence of the preceding result is that the Fourier transform is injective on L1(R).The Plancherel theorem and Parseval's theoremLet f(x) and g(x) be integrable, and let and be their Fourier transforms. If f(x) and g(x) are also square-integrable, then we have Parseval's theorem (Rudin 1987, p. 187):where the bar denotes complex conjugation.The Plancherel theorem, which is equivalent to Parseval's theorem, states (Rudin 1987, p. 186):The Plancherel theorem makes it possible to define the Fourier transform for functions in L2(R), as described in Generalizations below. The Plancherel theorem has the interpretation in the sciences that the Fourier transform preserves the energy of the original quantity. It should be noted that depending on the author either of these theorems might be referred to as the Plancherel theorem or as Parseval's theorem.See Pontryagin duality for a general formulation of this concept in the context of locally compact abelian groups.Poisson summation formulaThe Poisson summation formula provides a link between the study of Fourier transforms and Fourier Series. Given an integrable function ƒ we can consider the periodic summation of ƒ given by:where the summation is taken over the set of all integers k. The Poisson summation formula relates the Fourier series of to the Fourier transform of ƒ. Specifically it states that the Fourier series of is given by:Convolution theoremThe Fourier transform translates between convolution and multiplication of functions. If ƒ(x) and g(x) are integrablefunctions with Fourier transforms and respectively, then the Fourier transform of the convolution is given by the product of the Fourier transforms and (under other conventions for the definition of theFourier transform a constant factor may appear).This means that if:where ∗ denotes the convolution operation, then:In linear time invariant (LTI) system theory, it is common to interpret g(x) as the impulse response of an LTI systemwith input ƒ(x) and output h(x), since substituting the unit impulse for ƒ(x) yields h(x) = g(x). In this case, represents the frequency response of the system.Conversely, if ƒ(x) can be decomposed as the product of two square integrable functions p(x) and q(x), then theFourier transform of ƒ(x) is given by the convolution of the respective Fourier transforms and .Cross-correlation theoremIn an analogous manner, it can be shown that if h(x) is the cross-correlation of ƒ(x) and g(x):then the Fourier transform of h(x) is:As a special case, the autocorrelation of function ƒ(x) is:for whichEigenfunctionsOne important choice of an orthonormal basis for L2(R) is given by the Hermite functionswhere are the "probabilist's" Hermite polynomials, defined by Hn(x) = (−1)n exp(x2/2) D n exp(−x2/2). Under this convention for the Fourier transform, we have thatIn other words, the Hermite functions form a complete orthonormal system of eigenfunctions for the Fourier transform on L2(R) (Pinsky 2002). However, this choice of eigenfunctions is not unique. There are only four different eigenvalues of the Fourier transform (±1 and ±i) and any linear combination of eigenfunctions with the same eigenvalue gives another eigenfunction. As a consequence of this, it is possible to decompose L2(R) as a directsum of four spaces H0, H1, H2, and H3where the Fourier transform acts on Hksimply by multiplication by i k. Thisapproach to define the Fourier transform is due to N. Wiener (Duoandikoetxea 2001). The choice of Hermite functions is convenient because they are exponentially localized in both frequency and time domains, and thus give rise to the fractional Fourier transform used in time-frequency analysis (Boashash 2003).Fourier transform on Euclidean spaceThe Fourier transform can be in any arbitrary number of dimensions n. As with the one-dimensional case there are many conventions, for an integrable function ƒ(x) this article takes the definition:where x and ξ are n-dimensional vectors, and x·ξ is the dot product of the vectors. The dot product is sometimes written as .All of the basic properties listed above hold for the n-dimensional Fourier transform, as do Plancherel's and Parseval's theorem. When the function is integrable, the Fourier transform is still uniformly continuous and the Riemann–Lebesgue lemma holds. (Stein & Weiss 1971)Uncertainty principleGenerally speaking, the more concentrated f(x) is, the more spread out its Fourier transform must be. In particular, the scaling property of the Fourier transform may be seen as saying: if we "squeeze" a function in x, its Fourier transform "stretches out" in ξ. It is not possible to arbitrarily concentrate both a function and its Fourier transform.The trade-off between the compaction of a function and its Fourier transform can be formalized in the form of an Uncertainty Principle by viewing a function and its Fourier transform as conjugate variables with respect to the symplectic form on the time–frequency domain: from the point of view of the linear canonical transformation, the Fourier transform is rotation by 90° in the time–frequency domain, and preserves the symplectic form.Suppose ƒ(x) is an integrable and square-integrable function. Without loss of generality, assume that ƒ(x) is normalized:It follows from the Plancherel theorem that is also normalized.The spread around x = 0 may be measured by the dispersion about zero (Pinsky 2002) defined byIn probability terms, this is the second moment of about zero.The Uncertainty principle states that, if ƒ(x ) is absolutely continuous and the functions x ·ƒ(x ) and ƒ′(x ) are square integrable, then(Pinsky 2002).The equality is attained only in the case (hence ) where σ > 0is arbitrary and C 1 is such that ƒ is L 2–normalized (Pinsky 2002). In other words, where ƒ is a (normalized) Gaussian function, centered at zero.In fact, this inequality implies that:for any in R (Stein & Shakarchi 2003).In quantum mechanics, the momentum and position wave functions are Fourier transform pairs, to within a factor of Planck's constant. With this constant properly taken into account, the inequality above becomes the statement of the Heisenberg uncertainty principle (Stein & Shakarchi 2003).Spherical harmonicsLet the set of homogeneous harmonic polynomials of degree k on R n be denoted by A k . The set A k consists of the solid spherical harmonics of degree k . The solid spherical harmonics play a similar role in higher dimensions to the Hermite polynomials in dimension one. Specifically, if f (x ) = e −π|x |2P (x ) for some P (x ) in A k , then. Let the set H k be the closure in L 2(R n ) of linear combinations of functions of the form f (|x |)P (x )where P (x ) is in A k . The space L 2(R n ) is then a direct sum of the spaces H k and the Fourier transform maps each space H k to itself and is possible to characterize the action of the Fourier transform on each space H k (Stein & Weiss 1971). Let ƒ(x ) = ƒ0(|x |)P (x ) (with P (x ) in A k ), then whereHere J (n + 2k − 2)/2 denotes the Bessel function of the first kind with order (n + 2k − 2)/2. When k = 0 this gives a useful formula for the Fourier transform of a radial function (Grafakos 2004).Restriction problemsIn higher dimensions it becomes interesting to study restriction problems for the Fourier transform. The Fourier transform of an integrable function is continuous and the restriction of this function to any set is defined. But for a square-integrable function the Fourier transform could be a general class of square integrable functions. As such, the restriction of the Fourier transform of an L 2(R n ) function cannot be defined on sets of measure 0. It is still an active area of study to understand restriction problems in L p for 1 < p < 2. Surprisingly, it is possible in some cases to define the restriction of a Fourier transform to a set S , provided S has non-zero curvature. The case when S is the unit sphere in R n is of particular interest. In this case the Tomas-Stein restriction theorem states that the restriction of the Fourier transform to the unit sphere in R n is a bounded operator on L p provided 1 ≤ p ≤ (2n + 2) / (n + 3).One notable difference between the Fourier transform in 1 dimension versus higher dimensions concerns the partial sum operator. Consider an increasing collection of measurable sets E R indexed by R ∈ (0,∞): such as balls of radius R centered at the origin, or cubes of side 2R . For a given integrable function ƒ, consider the function ƒR defined by:Suppose in addition that ƒ is in L p (R n ). For n = 1 and 1 < p < ∞, if one takes E R = (−R, R), then ƒR converges to ƒ in L p as R tends to infinity, by the boundedness of the Hilbert transform. Naively one may hope the same holds true forn > 1. In the case that ERis taken to be a cube with side length R, then convergence still holds. Another naturalcandidate is the Euclidean ball ER= {ξ : |ξ| < R}. In order for this partial sum operator to converge, it is necessary that the multiplier for the unit ball be bounded in L p(R n). For n ≥ 2 it is a celebrated theorem of Charles Fefferman that the multiplier for the unit ball is never bounded unless p = 2 (Duoandikoetxea 2001). In fact, when p≠ 2, thisshows that not only may ƒR fail to converge to ƒ in L p, but for some functions ƒ ∈ L p(R n), ƒRis not even an element ofL p.GeneralizationsFourier transform on other function spacesIt is possible to extend the definition of the Fourier transform to other spaces of functions. Since compactly supported smooth functions are integrable and dense in L2(R), the Plancherel theorem allows us to extend the definition of the Fourier transform to general functions in L2(R) by continuity arguments. Further : L2(R) →L2(R) is a unitary operator (Stein & Weiss 1971, Thm. 2.3). Many of the properties remain the same for the Fourier transform. The Hausdorff–Young inequality can be used to extend the definition of the Fourier transform to include functions in L p(R) for 1 ≤ p≤ 2. Unfortunately, further extensions become more technical. The Fourier transform of functions in L p for the range 2 < p < ∞ requires the study of distributions (Katznelson 1976). In fact, it can be shown that there are functions in L p with p>2 so that the Fourier transform is not defined as a function (Stein & Weiss 1971).Fourier–Stieltjes transformThe Fourier transform of a finite Borel measure μ on R n is given by (Pinsky 2002):This transform continues to enjoy many of the properties of the Fourier transform of integrable functions. One notable difference is that the Riemann–Lebesgue lemma fails for measures (Katznelson 1976). In the case that dμ = ƒ(x) dx, then the formula above reduces to the usual definition for the Fourier transform of ƒ. In the case that μ is the probability distribution associated to a random variable X, the Fourier-Stieltjes transform is closely related to the characteristic function, but the typical conventions in probability theory take e ix·ξ instead of e−2πix·ξ (Pinsky 2002). In the case when the distribution has a probability density function this definition reduces to the Fourier transform applied to the probability density function, again with a different choice of constants.The Fourier transform may be used to give a characterization of continuous measures. Bochner's theorem characterizes which functions may arise as the Fourier–Stieltjes transform of a measure (Katznelson 1976). Furthermore, the Dirac delta function is not a function but it is a finite Borel measure. Its Fourier transform is a constant function (whose specific value depends upon the form of the Fourier transform used).Tempered distributionsThe Fourier transform maps the space of Schwartz functions to itself, and gives a homeomorphism of the space to itself (Stein & Weiss 1971). Because of this it is possible to define the Fourier transform of tempered distributions. These include all the integrable functions mentioned above, as well as well-behaved functions of polynomial growth and distributions of compact support, and have the added advantage that the Fourier transform of any tempered distribution is again a tempered distribution.The following two facts provide some motivation for the definition of the Fourier transform of a distribution. First let ƒ and g be integrable functions, and let and be their Fourier transforms respectively. Then the Fourier transform obeys the following multiplication formula (Stein & Weiss 1971),Secondly, every integrable function ƒ defines a distribution Tƒby the relationfor all Schwartz functions φ.In fact, given a distribution T, we define the Fourier transform by the relationfor all Schwartz functions φ.It follows thatDistributions can be differentiated and the above mentioned compatibility of the Fourier transform with differentiation and convolution remains true for tempered distributions.Locally compact abelian groupsThe Fourier transform may be generalized to any locally compact abelian group. A locally compact abelian group is an abelian group which is at the same time a locally compact Hausdorff topological space so that the group operations are continuous. If G is a locally compact abelian group, it has a translation invariant measure μ, called Haar measure. For a locally compact abelian group G it is possible to place a topology on the set of characters so that is also a locally compact abelian group. For a function ƒ in L1(G) it is possible to define the Fourier transform by (Katznelson 1976):Locally compact Hausdorff spaceThe Fourier transform may be generalized to any locally compact Hausdorff space, which recovers the topology but loses the group structure.Given a locally compact Hausdorff topological space X, the space A=C(X) of continuous complex-valued functions on X which vanish at infinity is in a natural way a commutative C*-algebra, via pointwise addition, multiplication, complex conjugation, and with norm as the uniform norm. Conversely, the characters of this algebra A, denoted are naturally a topological space, and can be identified with evaluation at a point of x, and one has an isometric isomorphism In the case where X=R is the real line, this is exactly the Fourier transform. Non-abelian groupsThe Fourier transform can also be defined for functions on a non-abelian group, provided that the group is compact. Unlike the Fourier transform on an abelian group, which is scalar-valued, the Fourier transform on a non-abelian group is operator-valued (Hewitt & Ross 1971, Chapter 8). The Fourier transform on compact groups is a major tool in representation theory (Knapp 2001) and non-commutative harmonic analysis.Let G be a compact Hausdorff topological group. Let Σ denote the collection of all isomorphism classes of finite-dimensional irreducible unitary representations, along with a definite choice of representation U(σ) on theHilbert space Hσ of finite dimension dσfor each σ ∈ Σ. If μ is a finite Borel measure on G, then the Fourier–Stieltjestransform of μ is the operator on Hσdefined bywhere is the complex-conjugate representation of U(σ) acting on Hσ. As in the abelian case, if μ is absolutely continuous with respect to the left-invariant probability measure λ on G, then it is represented asfor some ƒ ∈ L 1(λ). In this case, one identifies the Fourier transform of ƒ with the Fourier –Stieltjes transform of μ.The mapping defines an isomorphism between the Banach space M (G ) of finite Borel measures (see rca space) and a closed subspace of the Banach space C ∞(Σ) consisting of all sequences E = (E σ) indexed by Σ of (bounded) linear operators E σ : H σ → H σ for which the normis finite. The "convolution theorem" asserts that, furthermore, this isomorphism of Banach spaces is in fact an isomorphism of C * algebras into a subspace of C ∞(Σ), in which M (G ) is equipped with the product given by convolution of measures and C ∞(Σ) the product given by multiplication of operators in each index σ.The Peter-Weyl theorem holds, and a version of the Fourier inversion formula (Plancherel's theorem) follows: if ƒ ∈ L 2(G ), thenwhere the summation is understood as convergent in the L 2 sense.The generalization of the Fourier transform to the noncommutative situation has also in part contributed to the development of noncommutative geometry. In this context, a categorical generalization of the Fourier transform to noncommutative groups is Tannaka-Krein duality, which replaces the group of characters with the category of representations. However, this loses the connection with harmonic functions.AlternativesIn signal processing terms, a function (of time) is a representation of a signal with perfect time resolution, but no frequency information, while the Fourier transform has perfect frequency resolution, but no time information: the magnitude of the Fourier transform at a point is how much frequency content there is, but location is only given by phase (argument of the Fourier transform at a point), and standing waves are not localized in time – a sine wave continues out to infinity, without decaying. This limits the usefulness of the Fourier transform for analyzing signals that are localized in time, notably transients, or any signal of finite extent.As alternatives to the Fourier transform, in time-frequency analysis, one uses time-frequency transforms or time-frequency distributions to represent signals in a form that has some time information and some frequency information – by the uncertainty principle, there is a trade-off between these. These can be generalizations of the Fourier transform, such as the short-time Fourier transform or fractional Fourier transform, or can use different functions to represent signals, as in wavelet transforms and chirplet transforms, with the wavelet analog of the (continuous) Fourier transform being the continuous wavelet transform. (Boashash 2003). For a variable time and frequency resolution, the De Groot Fourier Transform can be considered.Applications Analysis of differential equationsFourier transforms and the closely related Laplace transforms are widely used in solving differential equations. The Fourier transform is compatible with differentiation in the following sense: if f (x ) is a differentiable function withFourier transform , then the Fourier transform of its derivative is given by . This can be used to transform differential equations into algebraic equations. Note that this technique only applies to problems whose domain is the whole set of real numbers. By extending the Fourier transform to functions of several variables partial differential equations with domain R n can also be translated into algebraic equations.。
专业名词专业英语信号处理导论
专业名词总结部分1.A/D conversion [eɪ] [diː][kən'vɜːʃ(ə)n]模数转换指为把数字信号转换为信息基本相同的模拟信号而设计的处理过程。
2.adder ['ædə]加法器加法器是产生数的和的装置。
加数和被加数为输入,和数与进位为输出的装置为半加器。
若加数、被加数与低位的进位数为输入,而和数与进位为输出则为全加器。
3.additive gauss white noise ['ædɪtɪv][gaʊs] [waɪt] [nɒɪz]加性高斯白噪声加性高斯白噪声指的是一种各频谱分量服从均匀分布(即白噪声),且幅度服从高斯分布的噪声信号。
因其可加性、幅度服从高斯分布且为白噪声的一种而得名。
4.aliasing ['eliəsɪŋ] 混叠频混现象又称为频谱混叠效应,它是指由于采样信号频谱发生变化,而出现高、低频成分发生混淆的一种现象。
5.all-pass function ['ɔl,pæs] ['fʌŋ(k)ʃ(ə)n] 全通函数全通函数是凡极点位于左半开平面,零点位于右半开平面,并且所有零点与极点对于虚轴为一一镜像对称的系统函数。
6.amplifier ['æmplɪfaɪə] 放大器是指能够使用较小的能量来控制较大能量的任何器件。
7.amplitude ['æmplɪtjuːd] 振幅指振动物体离开平衡位置的最大距离。
8.analog signal ['ænəlɒɡ] ['sɪgn(ə)l]模拟信号指信息参数在给定范围内表现为连续的信号。
或在一段连续的时间间隔内,其代表信息的特征量可以在任意瞬间呈现为任意数值的信号。
9.antialiasing profiler [,ænti'eliəsɪŋ] ['prəufailə] 抗混叠预滤波器指一种用以在输出电平中把混叠频率分量降低到微不足道的程度的低通滤波器。
Discrete-Time Fourier Transform

time system characterized by an impulse
response ha (t) for an input signal xa (t) is given
by:
ya (t) ha (t )xa ( )d
Applying the CTFT to both sides, we have:
1{X 2
(e
j
)
X
* (e
j
)},
xcs[n] X re (e j ), xca[n] jXim (e j )
x[n] X (e j ) X re (e j ) jX im (e j )
x[n] is a real sequence
xev[n] X re (e j ), xod [n] jX im (e j ) X (e j ) X *(e j ), X re (e j ) X re (e j ), X im (e j ) X im (e j ) X (e j ) X (e j ) ,
Frequency-domain
Description of a sequence in terms of complex exponential sequences of
the form{ e jn }.
3.1 The Continuous-Time
Fourier Transform
• CTFT -continuous in time, continuous in frequency
arg{X (e j )} arg{X (e j )}
• Example - Consider the causal sequence
x[n] n[n], 1
X (e j)
数字信号处理基于计算机的方法英文改编版第四版课程设计
Digital Signal Processing Using Computer-Based Methods -Course Design for the 4th EditionIntroductionDigital Signal Processing (DSP) is an area of study that has witnessed significant growth and advancement in recent times. Technological advancements have made it possible to work with signals and signals processing methods more effectively and efficiently. The use of computers has also contributed significantly to the development of DSP methods. In this course design, we will provide an overview of the Digital Signal Processing course designed for the 4th edition of the book titled Digital Signal Processing Using Computer-Based Methods.Overview of the CourseThis course is designed to provide students with a fundamental understanding of digital signal processing concepts, their applications, and techniques for analyzing signals. The course is divided into eight modules, covering the following topics:1.Introduction to Digital Signal Processing2.Discrete-Time Signals and Systems3.Discrete Fourier Transform4.Z-Transform and Analysis of LTI Systems5.FIR Filter Design6.IIR Filter Design7.Multirate Signal Processing8.DSP Applications in Speech and Image ProcessingThe course will cover both theoretical and practical aspects of DSP, including hands-on experience with MATLAB software. The course involves lectures, discussions, and assignments, which will enable students to develop an in-depth understanding of DSP concepts and their applications.Course ObjectivesThe primary objectives of this course are to: - Develop an in-depth understanding of digital signal processing concepts and techniques - Familiarize students with the use of MATLAB for signal analysis and processing - Develop skills for designing digital filters and analyzing signals using the Fourier and Z-transforms - Provide practical experience with signal processing applications in speech and image processingCourse OutlineModule 1: Introduction to Digital Signal Processing •Basic concepts of digital signal processing•Analog-to-digital conversion•Sampling theorem•Signal quantizationModule 2: Discrete-Time Signals and Systems•Discrete-time signals and their characteristics•Discrete-time systems and their properties•Convolution and correlation of discrete-time signalsModule 3: Discrete Fourier Transform•Fourier series and Fourier Transform•Discrete Fourier Transform (DFT) and its properties •Fast Fourier Transform (FFT) algorithmsModule 4: Z-Transform and Analysis of LTI Systems •Z-Transform and its properties•Transfer function and Frequency Response of LTI systems•Analysis of LTI systems using Z-TransformModule 5: FIR Filter Design•Design of Finite Impulse Response (FIR) filters•Windowing techniques and their effects•Filter design using Fourier SeriesModule 6: IIR Filter Design•Design of Infinite Impulse Response (IIR) filters•Pole-zero locations and their effects•Butterworth and Chebyshev filter designs Module 7: Multirate Signal Processing•Sampling rate conversion using decimation and interpolation•Polyphase decomposition and filter banks•Multistage decimation and interpolation Module 8: DSP Applications in Speech and Image Processing •Speech analysis and synthesis•Speech coding and compression•Image enhancement and restoration•Image compressionEvaluationThe grading for this course will be based on your performance in the following components: - Regularassignments and quizzes: 20% - Mid-term examination: 30% - Final examination: 50%ConclusionThis course in Digital Signal Processing will provide students with a comprehensive understanding of digital signal processing concepts and their applications. The course will focus on fundamental principles, practical applications, and hands-on experience with digital signal processing using MATLAB. Upon successful completion of this course, students will have the skills and knowledge to analyze and design digital signal processing systems.。
离散傅里叶变换
3.2 离散傅里叶变换的性质
DFT隐含着周期性,因此在讨论DFT的性质时,常与DFS的概念 联系起来,并把有限长序列看作周期序列的一个周期来处理。 设x1(n)和x2(n)的长度都为N,且它们对应的DFT分别为X1(k)和X2(k)。 1.线性 设x3(n)=ax1(n)+bx2(n),a和b都为常数,则
证明:
N 1
N 1
Y
k
DFT
y n
xn
m N
RN
n WNkn
xn
m N
WNkn
n0
n0
令n+m=n’,则有:
N 1m
N 1m
Y k DFT yn
x
n'
W kn'm
NN
WNkm
x
n'
W kn'
NN
n 'm
n 'm
即可因,为取主x值n'区N W间Nkn'为以求N和为区周间期,,得上证式。中的求和区间任取一个周期20
X (n)WNkn ,
k=0, 1, &, N-1
(3.1.2)
式中,WN
j 2
eN
,
N称为DFT变换区间长度,
N≥M,
通常称
(3.1.1)式和(3.1.2)式为离散傅里叶变换对。
Note:有限长序列x(n)的DFT即X(k)仍是有限长序列。
5
例 3.1.1 x(n)=R4(n) ,求x(n)的8点和16点DFT.
35
3. 3 频率域采样
这意味着,对于时间有限信号,可以像频带有限信号进行时域 采样而不丢失任何信息一样,可以在频域上进行采 样而不丢失任 何信息。这正是傅里叶变换中时域和频域对偶关系的反映,这有 着十分重要的意 义。DFT实现了频域离散化,开辟了在频域采用 数字技术处理的新领域。
FFT- origin 软件的信号分析原方程
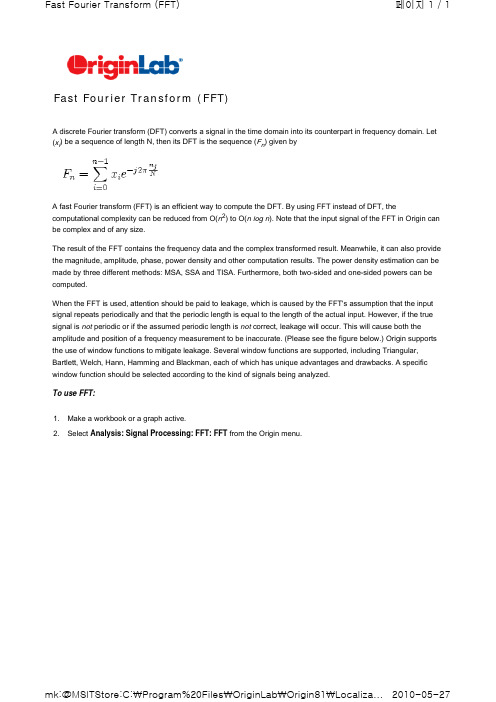
Fast Fourier Transform (FFT)A discrete Fourier transform (DFT) converts a signal in the time domain into its counterpart in frequency domain. Let (x i ) be a sequence of length N, then its DFT is the sequence (F n ) given byA fast Fourier transform (FFT) is an efficient way to compute the DFT. By using FFT instead of DFT, thecomputational complexity can be reduced from O(n 2) to O(n log n ). Note that the input signal of the FFT in Origin can be complex and of any size.The result of the FFT contains the frequency data and the complex transformed result. Meanwhile, it can also provide the magnitude, amplitude, phase, power density and other computation results. The power density estimation can be made by three different methods: MSA, SSA and TISA. Furthermore, both two-sided and one-sided powers can be computed.When the FFT is used, attention should be paid to leakage, which is caused by the FFT's assumption that the input signal repeats periodically and that the periodic length is equal to the length of the actual input. However, if the true signal is not periodic or if the assumed periodic length is not correct, leakage will occur. This will cause both the amplitude and position of a frequency measurement to be inaccurate. (Please see the figure below.) Origin supports the use of window functions to mitigate leakage. Several window functions are supported, including Triangular, Bartlett, Welch, Hann, Hamming and Blackman, each of which has unique advantages and drawbacks. A specific window function should be selected according to the kind of signals being analyzed. To use FFT: 1.Make a workbook or a graph active.2.Select Analysis: Signal Processing: FFT: FFT from the Origin menu.페이지 1 / 1Fast Fourier Transform (FFT)The FFT1 Dialog BoxInput Specifies the input signal, which could be complex. The real and imaginary parts of the signal can be save different columns or in the same column. The default is <Active>, which corresponds to the active datasetSampling Interval Specifies the sampling interval. The default is <Auto>, which corresponds to an automatically-computed in Please see the algorithm part for details.Specifies the computation options.WindowSpecifies the type of window used to suppress frequency leakage.z RectangleRectangular window:z WelchWelch windowz TriangularTriangular windowz BartlettBartlett windowz HanningHann WindowOptionsz HammingHamming window:z BlackmanBlackman windowNormalize Re, Im and MagSpecifies whether to normalize the complex, real, imaginary, magnitude and sqaure magnitude output. The default is false. Note that other outputs such as amplitude are not affected by this variable. Please see the algorithm section for details.ShiftSpecifies whether the result should be rearranged so that the lower frequency components are in the center.Unwrap phaseSpecifies whether the phase should be unwrapped.FactorSpecifies whether the Electrical Engineering or Science convention is used to set the sign of the Exponential Phase factor.z-1 (Electrical Engineering)The phase factor sign will be opposite to that of the Science option.z+1 (Science)The phase factor will be set according to the formulae listed in page 503 ofNumerical Recipes in C, 2nd edition.Spectrum TypeSpecifies the Nyquist interval over which power is calculated.z<auto>If the input signal is real, one-side power will be chosen; otherwise, two-sidepower will be selected.z One-sidedOne-sided power will be computed.z Two-sidedTwo-sided power will be computed.Normalize power toSpecifies the power density normalization method. Please see the algorithm part for detail.z MSA-Mean Square AmplitudeMean square amplitude methodz SSA-Sum Square AmplitudeSum square amplitude methodz TISA-Time Interval Square Amplitude'Time Integral square amplitude methodPreview Specifies the preview content in the dialog.z NoneNONEz Amplitude/PhaseBoth the amplitude and the phase.z Power/PhaseBoth the power and the phase.z AmplitudeThe amplitudez ImaginaryThe imaginary parts of the transformed data z MagnitudeThe magnitudez PhaseThe phasez PowerThe power spectrum or power densityz RealThe real parts of the transformed dataz Real/ImaginaryBoth the real parts and imaginary parts of the transformed data z dBThe amplitude in dBz Normalized dBThe normalized amplitude in dBz RMS AmplitudeThe RMS amplitudez Square AmplitudeThe square amplitudez Square MagnitudeThe square magnitudeUse the check boxes in this branch to control whether a quantity should be output and plotted.z RealSpecifies whether or not to output a graph of the real parts of the FFT result.z ImagSpecifies whether or not to output a graph of the imaginary parts of the FFT result.z Amplitude/PhaseSpecifies whether or not to output a combined graph of amplitude and phase.z PhaseSpecifies whether or not to output a graph of the phase.z Power/PhaseSpecifies whether or not to output a graph of the phase.Plot z Real/ImagSpecifies whether or not to output a combined graph of power and phase. z MagnitudeSpecifies whether or not to output a graph of the magnitude.z AmplitudeSpecifies whether or not to output a graph of the amplitude.z PowerSpecify whether or not to output a graph of the power.z dBSpecifies whether or not to output a graph of the result of dB.z Normalized dBSpecifies whether or not to output a graph of the result of normalized dB. z RMS AmplitudeSpecifies whether or not to output a graph of the RMS amplitude.z Square AmplitudeSpecifies whether or not to output a graph of the squared amplitude.z Square MagnitudeSpecifies whether or not to output a graph of the squared magnitude.ResultDataSheetSpecifies the worksheet sheet for outputting the result data.ResultGraphSheetSpecifies the sheet for outputting the result graphs.Algorithm (FFT1)A discrete Fourier transform (DFT) converts a signal in the time domain into its counterpart in frequency domain. Let (x i) be a sequence of length N, then its DFT is the sequence (F n) given byOrigin uses the FFTW library to perform Fourier transform. With the transformed data, the amplitude, magnitude and power density can be computed by Origin.FFTWIn FFTW, the computation of the transformed data is performed by an executor that is comprised of blocks of C code called "codelets". Each codelet specializes in one part of the transformation. With these codelets, the executor implements the Cooley-Turkey FFT algorithm, which factors the size of the input signal. By recursive factoring, the signal is broken into shorter parts. The results of the transforms of the short parts are multiplied; and finally the transform of the original signal is computed. More information on FFTW is available at /.Power densityBy definition, power density or spectrum can be computed with the following equation:where is the auto-correlation function of the input signal.However, we have a finite number of samples for the input signal and, therefore, computing the power spectrum with the definition is not possible as only certain methods can be used to estimate the power spectrum. The method used in Origin is the Periodogram, which estimates the power from the amplitude of the Fourier transformed data. While it is generally accepted that the squared amplitude is in proportion to the amplitude of power spectrum, various conventions exist for describing the normalization of power spectrum in each domain. The three descriptions used by Origin are "mean squared amplitude"(MSA), "sum squared amplitude"(SSA) and "time-integral squared amplitude"(TISA). They can be expressed as follows:where and are the real and imaginary parts of the transform data; is the length of the input sequence; is the sampling interval.Power spectrum can be either one-sided (single-sided) or two-sided (double-sided), depending on whether Two-Sided (2) or One-Sided (1) is selected for Spectrum Type (st). To compute the one-sided power density, it is necessary to compute the two-sided power density first. The result is then converted to the one-sided power using the following equations:whereis the one-sided power spectrum andis the two-sided power spectrum.If a window function is applied, the power result will be multiplied by a factor for compensation which is defined by :, where w (n ) is the window function defined below.More resultsOrigin can calculate the magnitude, phase and amplitude of the transformed data. Letandbe the realand imaginary parts of the transform data, and let be the size of the input signal. Use to represent the sampling interval. Suppose the norma variable is set to 0 (normalization is not used). More outputs are calculated with the following formulas:NormalizationThe above computations are actually based on the assumption that the norma vairable is set to false. If this variable is set to true, the complex, real, imaginary, magnitude and square magnitude results will be normalized. Note that phase, power, amplitude, normalzied amplitude, db and square amplitude are not affected by the norma vairable. If Two-Sided (2) is selected for Spectrum Type (st) and Normalize (norma) is set to true, the complex, real,imaginary, magnitude and square magnitude results will be divided by , where is the size of the input signal. If One-Sided (1) is selected for Spectrum Type (st) and Normalize (norma) is set to true, the complex, real, imaginary, magnitude and square magnitude results will be normalized as follows. Letbe the normalizedSpectrum Type is Two-sided (i=0 ~ n)Spectrum Type is One-sided (i=-n ~ n)PhaseMagnitudeAmplitudedBNormalized Amplitude in dBRMS amplituderesult:Automatic Computation of Sampling IntervalThe automatically computed sampling interval is the average increment of the time sequence, which is usually from the X column associated with the input signal. If there is no associated X column, the row numbers will be used. Note that if Origin fails to get the average increment, the sampling interval will be set to 1.FrequencyThe frequency column is obtained from the sampling interval and the number of input data points N. The n th frequency datum is given by:If there are N input data points, the frequency domain will also have N points with the maximum frequency,equal to.If shift result option is not selected, the transform will display from 0 to .Otherwise, the shifted transform displays from to .WindowsWindows are used to suppress leakage. Different types of windows are defined as follows in Origin.Rectangular Window:for and zero otherwise.Welch Window:Triangular Window:Bartlett Window:Hanning Window:Hamming Window:Blackman Window:Reference (FFT1)1.James W. Cooley and John W. Tukey, An algorithm for the machine calculation of complex Fourier series. Math. Comput. 19, 297 - 301 (1965).2.James C. Schatzman, Accuracy of the discrete Fourier transform and the fast Fourier transform. SIAM J. Sci. Comput. 17 (5), 1150 - 1166 (1996).3.Matteo Frigo and Steven G. Johnson. FFTW. /. 4.M. Frigo and S. G. Johnson. The Design and Implementation of FFTW3. Proceedings of the IEEE 93 (2), 216 - 231 (2005).5.Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, and Clifford Stein. Introduction to Algorithms, Second Edition. MIT Press and McGraw-Hill, 2001. Chapter 30: Polynomials and the FFT, pp.822–848.6.William H. Press, Brian P. Flannery, Saul A. Teukolsky, William T. Vetterling. 1992. Numerical Recipes in C: The Art of Scientific Computing. Cambridge University Press7.M.Greitans. 2005. Adaptive STFT-like Time-Frequency analysis from arbitrary distributed signal samples. International Workshop on Sampling Theory and Application, Samsun, Turkey.8.Julius O. Smith III and Xavier Serra. PARSHL: An Analysis/Synthesis Program for Non-Harmonic Sounds Based on a Sinusoidal Representation. Proceedings of the International Computer Music Conference (ICMC-87, Tokyo), Computer Music Association, 1987.9.Bendat, J.S. and Piersol, A.G. 1986. Random Data: Analysis and Measurement Procedures, second edition. Wiley -Interscience, New York.10.Smith, Julius O. 2003. Mathematics of the Discrete Fourier Transform (DFT). W3K Publishing.페이지 1 / 1Reference (FFT1)2010-05-27mk:@MSITStore:C:₩Program%20Files₩OriginLab₩Origin81₩Localiza...。
现代移动通信 蔡跃明 第三版思考题与习题参考答案 chapter_12
第十二章思考题与习题1.第四代移动通信系统和第一、第二和第三代移动通信系统有何不同?答:第四代移动通信系统具有以下特征:(1)第四代移动通信系统将是实时、宽带以及无缝覆盖的全IP多媒体通信系统。
它不是现在概念中的第一、二、三代,而是广泛用于各种电信环境的无线系统的总和,包括蜂窝系统、WLAN、无线广播系统等,支持各种空中接口。
它能够完成各个系统,包括无线LAN、室外宽带接入系统、2G、3G等之间的平滑切换。
用户可以根据不同系统自主选择,也可以自适应选择。
(2)第四代移动通信系统应该是符合全IP发展趋势的多媒体通信系统,核心网将基于IPv6,可以与Internet互连互通,并且承载与控制全程分离。
(3)第四代移动通信应该是适合于分组突发业务的系统,在步行环境中、车速环境中的峰值传输速率应分别达到1 Gbps和100 Mbps,适用于大动态范围业务(8 kbps~100 Mbps),频谱效率远远大于3G系统。
2.简述无线资源管理的基本原理,并说明它包括哪些基本部分?答:无线资源管理(RRM,Radio Resource Management)就是对移动通信系统的空中资源的规划和调度,它是在用户动态需求、信道动态时变和用户位置动态变化的环境下,对能量资源(如信号功率、能量)、时间资源(如时隙、业务帧、导频符号等)、频率资源(如信号带宽、保护频段、调制模式等)和空间资源(如天线角度、天线位置等)4类资源进行高效利用,以实现通信系统性能优化的技术。
无线资源管理的核心问题是在保证服务质量(QoS)的前提下,提高频谱利用率,其基本出发点在网内业务量和时延分布不均匀、且信道的状态因信号衰落和干扰而变化的状况时,动态分配和调整可用的资源。
3.举例说明MIMO技术利用多径衰落来改善系统性能的原理。
答:在这里我们就以两根天线发送和两根天线接收所组成的MIMO系统为例来说明多径衰落是怎样来改善系统的性能的,如下图:需要发送的信号经过串并转换把信号分成两路(这里假设采用的是水平编码),这两路先通过串并转换在进行编码,然后把编码后的信号经天线发送出去,由于天线之间的距离足够远,两天线所发送的信号是独立的,接收天线也满足独立分集的条件。
Discrete fourier transform calculation method and

专利名称:Discrete fourier transform calculationmethod and apparatus发明人:Yanni Chen,Rajesh Juluri申请号:US13741141申请日:20130114公开号:US09164959B1公开日:20151020专利内容由知识产权出版社提供专利附图:摘要:A discrete Fourier transform calculation apparatus includes a plurality ofmultiplier units, and a plurality of butterfly calculation units. Each butterfly calculation unit is configured to perform simultaneous calculations for at least two stages of a fastFourier transform (FFT) algorithm by using shared resources of the butterfly calculation unit. Each butterfly calculation unit includes a respective memory device to store input data for the corresponding at least two stages of the FFT algorithm, and a respective butterfly calculator coupled to the respective memory device. Each butterfly calculation unit also includes a respective controller coupled to the respective memory device and the respective butterfly calculator. The respective controller is configured to control the corresponding butterfly calculation unit to calculate the corresponding at least two stages of the FFT algorithm. The plurality of butterfly calculation units and the plurality of multiplier units are coupled in series.申请人:MARVELL INTERNATIONAL LTD.地址:Hamilton BM国籍:BM更多信息请下载全文后查看。
基于深度学习的雷达目标检测技术

雷达科学与技术!ada$ Science and Technology第6期2020年12月Vol.18No.6December2020DOI : 10. 3969/j. issn. 1672-2337. 2020. 06. 015基于深度学习的雷达目标检测技术刘军伟⑴",李 川1!,聂熠文1!,崔国龙3,汪育苗3,徐瑞昆12(1.中国电子科技集团公司第三十八研究所,安徽合肥230088;2. 孔径阵列与空间探测安徽省实 ,安徽合肥230088;3. 电子科技大学信息与通信工程学院,四川成都611731)摘 要:根据纽曼-皮尔逊准则,恒虚警方法(CFAR )在虚警率10一6、检测概率90%的条件下,可检测 目标的 大于12.8 dB 。
由于 于参考的环境单元 环 波分布差异性大,特别是隐身、低慢小等目标的能量强度值很难达到检测 6要求。
本文基于深度 ,彳波/噪声/干扰的目标距离多普勒(RD)域图像与相应理想情况下的目标RD 图作为,卩 6生成决供抑制处理后6 RD 图,根决 波抑制处理参数。
这一 对6过程最6生成 将环波/噪声/干扰6特性并将其过滤。
通过杂波、噪声和干扰环境下6实验,本文以在RD制杂波,增强目标 ,具备在实际杂波抑制场景下6可行性。
关键词:雷达目标检测;杂波抑制;深度学习;条件生成对抗网络中图分类号:TN957.5 文献标志码:A 文章编号:1672-2337(2020)06-0667-05A Target Detection Method Based on Deep LearningLIU Junwei 12, LI Chuan 12, NIE Yiwen 1,, CUI Guolong 3, WANG Yumiao 3,XU Ruikun 1,(1. The 38th Research Institute of China Electronics Technology Group Corporation , Hefei 230088, China ;2. Key Laboratory of Aperture Array and Space Application , Hefei 230088, China ;3. School of Informationand Communication Engineering , University of Electronic Science and Technology of China , Chengdu 611731 ,Ch —a)Abstract : According to Newman-Pearson criterion, constant false alarm rate (CFAR) method needs signal to noise ratio (SNR ) higher than 12. 8 dB to detect a target , w. r. t. 10—6 false alarm ratio and 90% detectionpossibility.However $duetolimitedenvironmentalunitsfordetectionandvarietyofclu t erdistributionsinprac- ticescenarios $targetenergyishardtoreachthethreshold $especia l yforinvisible $lowandsma l targets.Inthis paper $basedondeeplearningmethod $usingrange-Doppler (RD )imageoftargetswithclu t er $noiseandjam- ming $andcorrespondingidealRDimagesastrainingdataset $webuildaconditionalgenerativeadversarialnet- work.Inthisnetwork $ageneratorprovidesafter-processingRDimagestoadiscriminator $andthefeedbacksof thediscriminatorareusedtoadjusttheprocessingparametersinthegenerator.Thedynamicadversarialgaming processcanlearnthefeaturesofclu t er $noiseandjammingintheenvironmentandfilterthemout.Throughex- perimentsundertheenvironmentswithclu t er $noiseandjamming $ourmodelisvalidatede f ectiveforsuppress- ingclu t erandsharpeningtargetsignal $andisalsofeasibleinpraticalclu t erscenarios.Key words : radar target detection ; clutter suppression ; deep learning ; conditional generative adversarial nets0引言雷达检测技术主要通过能完成目标检测。
Discrete Fourier Transform

Discrete Fourier transformIn mathematics, the discrete Fourier transform (DFT) is a specific kind of Fourier transform, used in Fourier analysis. It transforms one function into another, which is called the frequency domain representation, or simply the DFT, of the original function (which is often a function in the time domain). But the DFT requires an input function that is discrete and whose non-zero values have a limited (finite) duration. Such inputs are often created by sampling a continuous function, like a person's voice. Unlike the discrete-time Fourier transform (DTFT), it only evaluates enough frequency components to reconstruct the finite segment that was analyzed. Using the DFT implies that the finite segment that is analyzed is one period of an infinitely extended periodic signal; if this is not actually true, a window function has to be used to reduce the artifacts in the spectrum. For the same reason, the inverse DFT cannot reproduce the entire time domain, unless the input happens to be periodic (forever). Therefore it is often said that the DFT is a transform for Fourier analysis of finite-domain discrete-time functions. The sinusoidal basis functions of the decomposition have the same properties.The input to the DFT is a finite sequence of real or complex numbers (with more abstract generalizations discussed below), making the DFT ideal for processing information stored in computers. In particular, the DFT is widely employed in signal processing and related fields to analyze the frequencies contained in a sampled signal, to solve partial differential equations, and to perform other operations such as convolutions or multiplying large integers. A key enabling factor for these applications is the fact that the DFT can be computed efficiently in practice using a fast Fourier transform (FFT) algorithm.FFT algorithms are so commonly employed to compute DFTs that the term "FFT" is often used to mean "DFT" in colloquial settings. Formally, there is a clear distinction: "DFT" refers to a mathematical transformation or function, regardless of how it is computed, whereas "FFT" refers to a specific family of algorithms for computing DFTs. The terminology is further blurred by the (now rare) synonym finite Fourier transform for the DFT, which apparently predates the term "fast Fourier transform" (Cooley et al., 1969) but has the same initialism.DefinitionThe sequence of N complex numbers x0, ..., xN−1is transformed into the sequence of N complex numbers X, ...,XN−1by the DFT according to the formula:where i is the imaginary unit and is a primitive N'th root of unity. (This expression can also be written in termsof a DFT matrix; when scaled appropriately it becomes a unitary matrix and the Xkcan thus be viewed as coefficients of x in an orthonormal basis.)The transform is sometimes denoted by the symbol , as in or or .The inverse discrete Fourier transform (IDFT) is given byA simple description of these equations is that the complex numbers represent the amplitude and phase of thedifferent sinusoidal components of the input "signal" . The DFT computes the from the , while theIDFT shows how to compute the as a sum of sinusoidal components with frequency cycles per sample. By writing the equations in this form, we are making extensive use of Euler's formula to express sinusoids in terms of complex exponentials, which are much easier to manipulate. In the same way, by writingin polar form, we obtain the sinusoid amplitude and phase from the complex modulus and argument of, respectively:where atan2 is the two-argument form of the arctan function. Note that the normalization factor multiplying the DFT and IDFT (here 1 and 1/N) and the signs of the exponents are merely conventions, and differ in some treatments. The only requirements of these conventions are that the DFT and IDFT have opposite-sign exponents and that theproduct of their normalization factors be 1/N. A normalization of for both the DFT and IDFT makes the transforms unitary, which has some theoretical advantages, but it is often more practical in numerical computation to perform the scaling all at once as above (and a unit scaling can be convenient in other ways).(The convention of a negative sign in the exponent is often convenient because it means that is the amplitude of a "positive frequency" . Equivalently, the DFT is often thought of as a matched filter: when looking for a frequency of +1, one correlates the incoming signal with a frequency of −1.)In the following discussion the terms "sequence" and "vector" will be considered interchangeable.PropertiesCompletenessThe discrete Fourier transform is an invertible, linear transformationwith C denoting the set of complex numbers. In other words, for any N > 0, an N-dimensional complex vector has a DFT and an IDFT which are in turn N-dimensional complex vectors.OrthogonalityThe vectors form an orthogonal basis over the set of N-dimensional complex vectors:where is the Kronecker delta. This orthogonality condition can be used to derive the formula for the IDFT from the definition of the DFT, and is equivalent to the unitarity property below.The Plancherel theorem and Parseval's theoremIf Xk and Ykare the DFTs of xnand ynrespectively then the Plancherel theorem states:where the star denotes complex conjugation. Parseval's theorem is a special case of the Plancherel theorem and states:These theorems are also equivalent to the unitary condition below.PeriodicityIf the expression that defines the DFT is evaluated for all integers k instead of just for , then the resulting infinite sequence is a periodic extension of the DFT, periodic with period N.The periodicity can be shown directly from the definition:Similarly, it can be shown that the IDFT formula leads to a periodic extension.The shift theoremMultiplying by a linear phase for some integer m corresponds to a circular shift of the output : is replaced by , where the subscript is interpreted modulo N (i.e., periodically). Similarly, a circularshift of the input corresponds to multiplying the output by a linear phase. Mathematically, if represents the vector x thenifthenandCircular convolution theorem and cross-correlation theoremThe convolution theorem for the continuous and discrete time Fourier transforms indicates that a convolution of two infinite sequences can be obtained as the inverse transform of the product of the individual transforms. With sequences and transforms of length N, a circularity arises:The quantity in parentheses is 0 for all values of m except those of the form , where p is any integer. At those values, it is 1. It can therefore be replaced by an infinite sum of Kronecker delta functions, and we continue accordingly. Note that we can also extend the limits of m to infinity, with the understanding that the x and y sequences are defined as 0 outside [0,N-1]:which is the convolution of the sequence with a periodically extended sequence defined by :Similarly, it can be shown that :which is the cross-correlation of andA direct evaluation of the convolution or correlation summation (above) requiresoperations for an outputsequence of length N. An indirect method, using transforms, can take advantage of the efficiency of the fast Fourier transform (FFT) to achieve much better performance. Furthermore, convolutions can be used to efficiently compute DFTs via Rader's FFT algorithm and Bluestein's FFT algorithm.Methods have also been developed to use circular convolution as part of an efficient process that achieves normal (non-circular) convolution with an or sequence potentially much longer than the practical transform size (N ).Two such methods are called overlap-save and overlap-add [1] .Convolution theorem dualityIt can also be shown that :which is the circular convolution of and .Trigonometric interpolation polynomial The trigonometric interpolation polynomialN even ,for N odd,where the coefficients X k are given by the DFT of x n above, satisfies the interpolation propertyfor .For even N , notice that the Nyquist componentis handled specially.This interpolation is not unique: aliasing implies that one could add N to any of the complex-sinusoid frequencies(e.g. changing to ) without changing the interpolation property, but giving different values in between the points. The choice above, however, is typical because it has two useful properties. First, it consistsof sinusoids whose frequencies have the smallest possible magnitudes, and therefore minimizes the mean-squareslope of the interpolating function. Second, if the are real numbers, then is real as well.In contrast, the most obvious trigonometric interpolation polynomial is the one in which the frequencies range from0 to (instead of roughly to as above), similar to the inverse DFT formula. This interpolation does not minimize the slope, and is not generally real-valued for real ; its use is a common mistake.The unitary DFTAnother way of looking at the DFT is to note that in the above discussion, the DFT can be expressed as a Vandermonde matrix:whereis a primitive Nth root of unity. The inverse transform is then given by the inverse of the above matrix:With unitary normalization constants , the DFT becomes a unitary transformation, defined by a unitary matrix:where det() is the determinant function. The determinant is the product of the eigenvalues, which are always oras described below. In a real vector space, a unitary transformation can be thought of as simply a rigid rotation of the coordinate system, and all of the properties of a rigid rotation can be found in the unitary DFT.The orthogonality of the DFT is now expressed as an orthonormality condition (which arises in many areas of mathematics as described in root of unity):If is defined as the unitary DFT of the vector thenand the Plancherel theorem is expressed as:If we view the DFT as just a coordinate transformation which simply specifies the components of a vector in a new coordinate system, then the above is just the statement that the dot product of two vectors is preserved under a unitary DFT transformation. For the special case , this implies that the length of a vector is preserved aswell—this is just Parseval's theorem:Expressing the inverse DFT in terms of the DFTA useful property of the DFT is that the inverse DFT can be easily expressed in terms of the (forward) DFT, via several well-known "tricks". (For example, in computations, it is often convenient to only implement a fast Fourier transform corresponding to one transform direction and then to get the other transform direction from the first.) First, we can compute the inverse DFT by reversing the inputs:(As usual, the subscripts are interpreted modulo N; thus, for , we have .)Second, one can also conjugate the inputs and outputs:Third, a variant of this conjugation trick, which is sometimes preferable because it requires no modification of the data values, involves swapping real and imaginary parts (which can be done on a computer simply by modifying pointers). Define swap( ) as with its real and imaginary parts swapped—that is, if thenswap( ) is . Equivalently, swap( ) equals . ThenThat is, the inverse transform is the same as the forward transform with the real and imaginary parts swapped for both input and output, up to a normalization (Duhamel et al., 1988).The conjugation trick can also be used to define a new transform, closely related to the DFT, that is involutary—that is, which is its own inverse. In particular, is clearly its own inverse: . A closely related involutary transformation (by a factor of (1+i) /√2) is , since thefactors in cancel the 2. For real inputs , the real part of is none other than the discrete Hartley transform, which is also involutary.Eigenvalues and eigenvectorsThe eigenvalues of the DFT matrix are simple and well-known, whereas the eigenvectors are complicated, not unique, and are the subject of ongoing research.Consider the unitary form defined above for the DFT of length N, whereThis matrix satisfies the matrix polynomial equation:This can be seen from the inverse properties above: operating twice gives the original data in reverse order, so operating four times gives back the original data and is thus the identity matrix. This means that the eigenvalues satisfy the equation:Therefore, the eigenvalues of are the fourth roots of unity: is +1, −1, +i, or −i.Since there are only four distinct eigenvalues for this matrix, they have some multiplicity. The multiplicitygives the number of linearly independent eigenvectors corresponding to each eigenvalue. (Note that there are N independent eigenvectors; a unitary matrix is never defective.)The problem of their multiplicity was solved by McClellan and Parks (1972), although it was later shown to have been equivalent to a problem solved by Gauss (Dickinson and Steiglitz, 1982). The multiplicity depends on the value of N modulo 4, and is given by the following table:Multiplicities of the eigenvalues λ of the unitary DFT matrix U as a function of thetransform size N (in terms of an integer m).size N λ = +1 λ = −1λ = -iλ = +i4m m + 1m m m− 14m + 1m + 1m m m4m + 2m + 1m + 1m m4m + 3m + 1m + 1m + 1mOtherwise stated, the characteristic polynomial of is:No simple analytical formula for general eigenvectors is known. Moreover, the eigenvectors are not unique because any linear combination of eigenvectors for the same eigenvalue is also an eigenvector for that eigenvalue. Various researchers have proposed different choices of eigenvectors, selected to satisfy useful properties like orthogonality and to have "simple" forms (e.g., McClellan and Parks, 1972; Dickinson and Steiglitz, 1982; Grünbaum, 1982; Atakishiyev and Wolf, 1997; Candan et al., 2000; Hanna et al., 2004; Gurevich and Hadani, 2008).A straightforward approach is to discretize the eigenfunction of the continuous Fourier transform, namely the Gaussian function. Since periodic summation of the function means discretizing its frequency spectrum and discretization means periodic summation of the spectrum, the discretized and periodically summed Gaussian function yields an eigenvector of the discrete transform:•.A closed form expression for the series is not known, but it converges rapidly.Two other simple closed-form analytical eigenvectors for special DFT period N were found (Kong, 2008):For DFT period N = 2L + 1 = 4K +1, where K is an integer, the following is an eigenvector of DFT:•For DFT period N = 2L = 4K, where K is an integer, the following is an eigenvector of DFT:•The choice of eigenvectors of the DFT matrix has become important in recent years in order to define a discrete analogue of the fractional Fourier transform—the DFT matrix can be taken to fractional powers by exponentiating the eigenvalues (e.g., Rubio and Santhanam, 2005). For the continuous Fourier transform, the natural orthogonal eigenfunctions are the Hermite functions, so various discrete analogues of these have been employed as the eigenvectors of the DFT, such as the Kravchuk polynomials (Atakishiyev and Wolf, 1997). The "best" choice of eigenvectors to define a fractional discrete Fourier transform remains an open question, however.The real-input DFTIf are real numbers, as they often are in practical applications, then the DFT obeys the symmetry:The star denotes complex conjugation. The subscripts are interpreted modulo N.Therefore, the DFT output for real inputs is half redundant, and one obtains the complete information by onlylooking at roughly half of the outputs . In this case, the "DC" element is purely real, and for even N the "Nyquist" element is also real, so there are exactly N non-redundant real numbers in the first half + Nyquist element of the complex output X.Using Euler's formula, the interpolating trigonometric polynomial can then be interpreted as a sum of sine and cosine functions.Generalized/shifted DFTIt is possible to shift the transform sampling in time and/or frequency domain by some real shifts a and b, respectively. This is sometimes known as a generalized DFT (or GDFT), also called the shifted DFT or offset DFT, and has analogous properties to the ordinary DFT:Most often, shifts of (half a sample) are used. While the ordinary DFT corresponds to a periodic signal in both time and frequency domains, produces a signal that is anti-periodic in frequency domain ( ) and vice-versa for . Thus, the specific case of is known as an odd-time odd-frequency discrete Fourier transform (or O2 DFT). Such shifted transforms are most often used for symmetric data, to represent different boundary symmetries, and for real-symmetric data they correspond to different forms of the discrete cosine and sine transforms.Another interesting choice is , which is called the centered DFT (or CDFT). The centered DFT has the useful property that, when N is a multiple of four, all four of its eigenvalues (see above) have equal multiplicities (Rubio and Santhanam, 2005)[2]The discrete Fourier transform can be viewed as a special case of the z-transform, evaluated on the unit circle in the complex plane; more general z-transforms correspond to complex shifts a and b above.Multidimensional DFTThe ordinary DFT transforms a one-dimensional sequence or array that is a function of exactly one discrete variable n. The multidimensional DFT of a multidimensional array that is a function of d discretevariables for in is defined by:where as above and the d output indices run from . This is more compactly expressed in vector notation, where we define andas d-dimensional vectors of indices from 0 to , which we define as:where the division is defined as to be performed element-wise, and thesum denotes the set of nested summations above.The inverse of the multi-dimensional DFT is, analogous to the one-dimensional case, given by:As the one-dimensional DFT expresses the input as a superposition of sinusoids, the multidimensional DFTexpresses the input as a superposition of plane waves, or sinusoids. The direction of oscillation in space is . The amplitudes are . This decomposition is of great importance for everything from digital image processing (two-dimensional) to solving partial differential equations. The solution is broken up into plane waves.The multidimensional DFT can be computed by the composition of a sequence of one-dimensional DFTs along each dimension. In the two-dimensional case the independent DFTs of the rows (i.e., along ) arecomputed first to form a new array . Then the independent DFTs of y along the columns (along ) are computed to form the final result . Alternatively the columns can be computed first and then the rows. Theorder is immaterial because the nested summations above commute.An algorithm to compute a one-dimensional DFT is thus sufficient to efficiently compute a multidimensional DFT. This approach is known as the row-column algorithm. There are also intrinsically multidimensional FFT algorithms.The real-input multidimensional DFTFor input data consisting of real numbers, the DFT outputs have a conjugate symmetry similar to the one-dimensional case above:where the star again denotes complex conjugation and the -th subscript is again interpreted modulo (for).ApplicationsThe DFT has seen wide usage across a large number of fields; we only sketch a few examples below (see also the references at the end). All applications of the DFT depend crucially on the availability of a fast algorithm to compute discrete Fourier transforms and their inverses, a fast Fourier transform.Spectral analysisWhen the DFT is used for spectral analysis, the sequence usually represents a finite set of uniformly-spacedtime-samples of some signal , where t represents time. The conversion from continuous time to samples (discrete-time) changes the underlying Fourier transform of x(t) into a discrete-time Fourier transform (DTFT), which generally entails a type of distortion called aliasing. Choice of an appropriate sample-rate (see Nyquist frequency) is the key to minimizing that distortion. Similarly, the conversion from a very long (or infinite) sequence to a manageable size entails a type of distortion called leakage, which is manifested as a loss of detail (aka resolution) in the DTFT. Choice of an appropriate sub-sequence length is the primary key to minimizing that effect. When the available data (and time to process it) is more than the amount needed to attain the desired frequency resolution, a standard technique is to perform multiple DFTs, for example to create a spectrogram. If the desired result is a power spectrum and noise or randomness is present in the data, averaging the magnitude components of the multiple DFTs is a useful procedure to reduce the variance of the spectrum (also called a periodogram in this context); two examples of such techniques are the Welch method and the Bartlett method; the general subject of estimating the power spectrum of a noisy signal is called spectral estimation.A final source of distortion (or perhaps illusion) is the DFT itself, because it is just a discrete sampling of the DTFT, which is a function of a continuous frequency domain. That can be mitigated by increasing the resolution of the DFT. That procedure is illustrated in the discrete-time Fourier transform article.•The procedure is sometimes referred to as zero-padding, which is a particular implementation used in conjunction with the fast Fourier transform (FFT) algorithm. The inefficiency of performing multiplications and additions with zero-valued "samples" is more than offset by the inherent efficiency of the FFT.•As already noted, leakage imposes a limit on the inherent resolution of the DTFT. So there is a practical limit to the benefit that can be obtained from a fine-grained DFT.Data compressionThe field of digital signal processing relies heavily on operations in the frequency domain (i.e. on the Fourier transform). For example, several lossy image and sound compression methods employ the discrete Fourier transform: the signal is cut into short segments, each is transformed, and then the Fourier coefficients of high frequencies, which are assumed to be unnoticeable, are discarded. The decompressor computes the inverse transform based on this reduced number of Fourier coefficients. (Compression applications often use a specialized form of the DFT, the discrete cosine transform or sometimes the modified discrete cosine transform.)Partial differential equationsDiscrete Fourier transforms are often used to solve partial differential equations, where again the DFT is used as an approximation for the Fourier series (which is recovered in the limit of infinite N). The advantage of this approach is that it expands the signal in complex exponentials e inx, which are eigenfunctions of differentiation: d/dx e inx = in e inx. Thus, in the Fourier representation, differentiation is simple—we just multiply by i n. (Note, however, that the choice of n is not unique due to aliasing; for the method to be convergent, a choice similar to that in the trigonometric interpolation section above should be used.) A linear differential equation with constant coefficients is transformed into an easily solvable algebraic equation. One then uses the inverse DFT to transform the result back into the ordinary spatial representation. Such an approach is called a spectral method.Polynomial multiplicationSuppose we wish to compute the polynomial product c(x) = a(x) · b(x). The ordinary product expression for the coefficients of c involves a linear (acyclic) convolution, where indices do not "wrap around." This can be rewritten as a cyclic convolution by taking the coefficient vectors for a(x) and b(x) with constant term first, then appending zeros so that the resultant coefficient vectors a and b have dimension d > deg(a(x)) + deg(b(x)). Then,Where c is the vector of coefficients for c(x), and the convolution operator is defined soBut convolution becomes multiplication under the DFT:Here the vector product is taken elementwise. Thus the coefficients of the product polynomial c(x) are just the terms 0, ..., deg(a(x)) + deg(b(x)) of the coefficient vectorWith a fast Fourier transform, the resulting algorithm takes O (N log N) arithmetic operations. Due to its simplicity and speed, the Cooley–Tukey FFT algorithm, which is limited to composite sizes, is often chosen for the transform operation. In this case, d should be chosen as the smallest integer greater than the sum of the input polynomialdegrees that is factorizable into small prime factors (e.g. 2, 3, and 5, depending upon the FFT implementation).Multiplication of large integersThe fastest known algorithms for the multiplication of very large integers use the polynomial multiplication method outlined above. Integers can be treated as the value of a polynomial evaluated specifically at the number base, with the coefficients of the polynomial corresponding to the digits in that base. After polynomial multiplication, a relatively low-complexity carry-propagation step completes the multiplication.Some discrete Fourier transform pairs Some DFT pairs NoteShift theoremReal DFTfrom the geometric progression formulafrom the binomial theoremis a rectangular window function of W pointscentered on , where W is an odd integer, and is asinc-like functionDiscretization and periodic summation of the scaledGaussian functions for . Since either or islarger than one and thus warrants fast convergence ofone of the two series, for large you may choose tocompute the frequency spectrum and convert to the timedomain using the discrete Fourier transform.Derivation as Fourier seriesThe DFT can be derived as a truncation of the Fourier series of a periodic sequence of impulses.GeneralizationsRepresentation theoryThe DFT can be interpreted as the complex-valued representation theory of the finite cyclic group. In other words, asequence of n complex numbers can be thought of as an element of n -dimensional complex space orequivalently a function from the finite cyclic group of order n to the complex numbers,This latter may be suggestively written to emphasize that this is a complex vector space whose coordinates are indexed by the n -element setFrom this point of view, one may generalize the DFT to representation theory generally, or more narrowly to the representation theory of finite groups.More narrowly still, one may generalize the DFT by either changing the target (taking values in a field other than the complex numbers), or the domain (a group other than a finite cyclic group), as detailed in the sequel.Other fieldsMany of the properties of the DFT only depend on the fact that is a primitive root of unity, sometimesdenoted or (so that ). Such properties include the completeness, orthogonality, Plancherel/Parseval, periodicity, shift, convolution, and unitarity properties above, as well as many FFT algorithms. For this reason, the discrete Fourier transform can be defined by using roots of unity in fields other than the complex numbers, and such generalizations are commonly called number-theoretic transforms (NTTs) in the case of finite fields. For more information, see number-theoretic transform and discrete Fourier transform (general).Other finite groupsThe standard DFT acts on a sequence x0, x1, …, xN−1of complex numbers, which can be viewed as a function {0, 1,…, N− 1} → C. The multidimensional DFT acts on multidimensional sequences, which can be viewed as functionsThis suggests the generalization to Fourier transforms on arbitrary finite groups, which act on functions G→ C where G is a finite group. In this framework, the standard DFT is seen as the Fourier transform on a cyclic group, while the multidimensional DFT is a Fourier transform on a direct sum of cyclic groups.AlternativesAs with other Fourier transforms, there are various alternatives to the DFT for various applications, prominent among which are wavelets. The analog of the DFT is the discrete wavelet transform (DWT). From the point of view of time–frequency analysis, a key limitation of the Fourier transform is that it does not include location information, only frequency information, and thus has difficulty in representing transients. As wavelets have location as well as frequency, they are better able to represent location, at the expense of greater difficulty representing frequency. For details, see comparison of the discrete wavelet transform with the discrete Fourier transform.Notes[1]T. G. Stockham, Jr., "High-speed convolution and correlation," in 1966 Proc. AFIPS Spring Joint Computing Conf. Reprinted in DigitalSignal Processing, L. R. Rabiner and C. M. Rader, editors, New York: IEEE Press, 1972.[2]Santhanam, Balu; Santhanam, Thalanayar S. "Discrete Gauss-Hermite functions and eigenvectors of the centered discrete Fourier transform"(/Proceedings/ICASSP 2007/pdfs/0301385.pdf), Proceedings of the 32nd IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP 2007, SPTM-P12.4), vol. III, pp. 1385-1388.References•Brigham, E. Oran (1988). The fast Fourier transform and its applications. Englewood Cliffs, N.J.: Prentice Hall.ISBN 0-13-307505-2.•Oppenheim, Alan V.; Schafer, R. W.; and Buck, J. R. (1999). Discrete-time signal processing. Upper Saddle River, N.J.: Prentice Hall. ISBN 0-13-754920-2.•Smith, Steven W. (1999). "Chapter 8: The Discrete Fourier Transform" (/ch8/1.htm). The Scientist and Engineer's Guide to Digital Signal Processing (Second ed.). San Diego, Calif.: California Technical Publishing. ISBN 0-9660176-3-3.•Cormen, Thomas H.; Charles E. Leiserson, Ronald L. Rivest, and Clifford Stein (2001). "Chapter 30: Polynomials and the FFT". Introduction to Algorithms (Second ed.). MIT Press and McGraw-Hill. pp. 822–848.ISBN 0-262-03293-7. esp. section 30.2: The DFT and FFT, pp. 830–838.。
正弦扫频振动试验结构响应的高精度频谱分析方法

号进行整周期截断,以减少谐波分析中频谱泄漏造成的误差;然后通过 DFT 方法对截断后的时域信号进
行频谱分析,得到信号的幅值谱。利用该方法对某航天器正弦振动试验数据进行频谱分析,并和其他的
时频分析方法进行精度对比。结果表明,该方法适用性好且能有效减小频谱分析误差。
关键词:正弦扫频振动试验;频率跟踪;时频分析;结构响应
Abstract: A frequency tracking discrete Fourier transform (DFT) algorithm based on frequency sweep for analyzing the swept sine test signal is proposed. The fundamental frequency is identified based on the zero crossing and the least squares techniques. The discrete time signal is truncated at integer periods according to the fundamental frequency, to minimize the effect of the frequency spectrum leakage in the analysis of the harmonics, and the spectrum of the truncated signal is calculated by the DFT to obtain the harmonic amplitude of the sample signal. This method is used to analyze the frequency spectrum of the sinusoidal vibration test data of a spacecraft, and the accuracy is compared with that of other time-frequency analysis methods. It is shown that the proposed method has a good adaptability and can be used to reduce the error of the frequency analysis.
DFT-SOGI 技术的在电压参数估计中的应用
DFT-SOGI 技术的在电压参数估计中的应用摘要:在单相电压谐波畸变及频率突变等异常情况下为了快速准确地获得电网电压的基本参数如频率,相位角和幅值,本文在传统离散傅立叶变换(Discrete Fourier Transform, DFT)的基础上通过增加基于二阶广义积分的正交信号发生器模块(Quadrature Signal Generator based on a Second Order Generalized Integrator, QSG-SOGI)来提高电压幅值和相角的测量精度。
该技术利用固定窗口的DFT模块估计随时间变化的单相电网电压基波频率以此作为QSG-SOGI谐振频率,通过SOGI模块来估计电网电压的基本参数。
仿真结果表明DFT-SOGI技术能快速准确地跟踪电网电压频率和相位且频率估计的振荡幅度较小。
关键字:谐波畸变;频率闪变;离散傅立叶变换;正交信号发生器0 前言无论是与电网连接的逆变器,不间断电源和有源滤波器还是电力系统的控制、保护和电能质量的监控等方面电网电压的基本参数如频率、幅值和相位角都是必需的信息[1-2]。
从理想的电网电压波形中获得这些参数是比较容易的,但是当电力系统发生故障或发电功率和负荷需求动态变化时会加重电网电压的谐波畸变或频率波动,从而导致频率或相位的振荡,不能准确的跟踪电网电压[3-4]。
目前跟踪和估计电压波形常用的方法有卡尔曼滤波器,增强型锁相环(Enhanced Phase Locked Loop ,EPLL),基于二阶广义积分器的锁频环(Frequency Locked Loop (FLL) based QSG-SOGI,SOGI-FLL)和基于二阶广义积分器的锁频环(Phase Locked Loop (PLL) based QSG-SOGI,SOGI-PLL)等技术。
卡尔曼滤波器可以估计随时间变化的电网电压波形,通过噪声测量求出状态变量的一个最佳估计,缺点是算法复杂运算量大且不易建立模型和测量误差的协方差矩阵。
基于离散余弦变换域的块相关性和马尔可夫模型的图像隐写分析

第38卷第5期2009年10月信息与控制Information and ControlV ol.38,No.5Oct.,2009文章编号:1002-0411(2009)-05-0602-06基于离散余弦变换域的块相关性和马尔可夫模型的图像隐写分析孙子文,纪志成(江南大学通信与控制工程学院,江苏无锡214122)摘要:提出高阶统计方法检测JPEG图像隐写.为充分描述图像数据及它们空间位置的相关性,运用了JPEG 块内、块间系数间的相关性.使用量化分块DCT系数绝对值之差生成水平、垂直和zigzag方向的块内、块间差分数组,采用马尔可夫过程模拟差分数组,提取二阶统计量——差分数组转移概率矩阵——为隐写分析特征向量.仿真结果证明本文提出的方法的检出率高于已知方法的检出率.关键词:隐写分析;马尔可夫模型;块内块间相关性中图分类号:TP391文献标识码:AImage Steganalysis Based on Block Correlation and Markov Model in DCT DomainSUN Zi-wen,JI Zhi-cheng(School of Communication and Control Engineering,Jiangnan University,Wuxi214122,China)Abstract:A high-order statistical method is proposed to detect JPEG image steganography.In order to describe the correlations between image data and their spatial positions fully,both the intra-block and inter-block correlations among JPEG coefficients are utilized.The intra-block and inter-block difference arrays along horizontal,vertical,and zigzag directions are generated by using the difference between the absolute value of quantized block discrete cosine transform coefficients.Markov process is applied to modeling these difference arrays,and the second order statistics,which are transition probability matrices for all difference arrays,are adopted as feature vectors for steganalysis.The simulation results show that the proposed scheme has higher detecting rates than known schemes.Keywords:stganalysis;Markov model;intra-bolck and inter-block correlation1引言(Introduction)隐写术和数字水印近来成为一个研究热点.很多隐写术软件和数字水印算法能免费从互联网上下载.隐写术系统的主要要求是在给定嵌入机制和掩体对象来源的前提下隐藏数据来满足统计的不可检测性.如果除了随机猜想就不存在隐写分析攻击能区别掩体对象和载体对象,则该隐写术方法被认为是安全的[1].随着隐写术的不断发展,隐写分析技术也得到不断提高.隐写分析技术主要分类为专用隐写分析技术和通用隐写分析技术,前者是针对特定隐写算法的隐写分析技术,而后者是不依赖于具体隐写算法的通用隐写分析技术.通用隐写分析技术假设可以用一小数量集的数字特征来描述“自然图像”的特性,通过计算大量图像数据库的特征得到自然掩体图像的特征向量分布,应用人工智能或模式识别方法,用分类器在特征空间中识别自然掩体图像和隐写图像[2].1.1相关隐写分析方法Pevny和Fridrich提出了分别从JPEG图像及其近似图像的DCT系数提取23维特征向量[2,3],包括一阶统计量DCT系数亮度直方图,体现块间DCT 系数依赖的相邻块DCT系数差分绝对值统计,以及二阶统计量相邻系数的共生矩阵,实现了对JPEG 图像上Jsteg、F5和OutGuess0.13等隐写术的可靠并且高效的检测,但特征提取比较复杂.平玲娣等[4]提出分别在JPEG图像及其近似图像DCT域中提取系数直方图、块间系数差值直方图、相邻块系数对直方图和DCT边界直方图,以及空域相邻像素差值邻接直方图等特征.Liu等[5,6]提出基于高阶微分的隐写分析方法,颜色信道内统计特性包括像素的亮度、一阶、二阶全微分,一阶、二阶、三阶偏微分在内的6个对象的直方图,及6个基金项目:江南大学青年科学基金资助项目(52210754).收稿日期:2008-10-105期孙子文等:基于离散余弦变换域的块相关性和马尔可夫模型的图像隐写分析603对象分别在“行”“列”方向相邻像素位置处的共生矩阵,共18个统计量;颜色信道间统计特性包括颜色信道间的15个共生矩阵和综合考虑3个颜色信道的4个“梯度”共生矩阵;再对所有直方图求1维DFT(discrete Fourier transform)并计算其一阶、二阶统计矩,对所有的共生矩阵求2维DFT并计算其一阶、二阶统计矩;最后获得共计136维统计矩特征向量;最后利用主元分析法降维到18维特征向量.此方法检出率高,但特征计算比较复杂,计算量很大.2006年,Shi等[7]对JPEG图像进行8×8分块DCT变换(block discrete cosine transform,BDCT)并进行标准JPEG量化,量化后系数取绝对值,将得到的所有的BDCT系数矩阵定义为JPEG2-D数组;并沿JPEG2-D数组水平、垂直、主对角、辅对角4个方向构造差分JPEG2-D数组,计算差分数组的转移概率矩阵(transition probability matrix,TPM)为特征.其实验结果显示对于采用矩阵编码的F5隐写,在低嵌入率条件下检出率较低.2008年,Chen等[8]在文[7]的基础上,提出了改进的算法.改进算法以文[7]的特征为块内相关性特征,同时增加了块间相关性特征.块间相关性是在文[7]定义的JPEG2-D数组中,取所有BDCT 块中相同空间频率位置的交流系数构造63个Mode 2-D数组,并用与差分JPEG2-D数组相同的方法构造水平、垂直、主对角、辅对角四向差分Mode2-D 数组,计算各方向差分数组的TPM并取63个转移概率矩阵的平均值为块间的相关性特征.文[8]在文[7]的基础上增加块间特征,其检出率明显高于文[7],尤其解决了文[7]的方法在低嵌入率条件下检出率较低的不足.对于JPEG图像,块内相关性主要体现在DCT 块内相邻频率系数间,块间相关性主要体现在相邻块中相同频率系数间.文[7]中差分JPEG2-D数组的构造是基于全部的BDCT系数矩阵,不能准确地反映块内系数相关性;虽然文[8]增加了块间的相关性,其检测效果优于文[7],但其反映块间相关性特征的差分Mode2-D数组构造方法是基于全部BDCT中的相同频率系数,不能很好地反映相邻BDCT的相关性.因此选取的特征既不能很好地体现BDCT内系数的相关性,又不能充分地体现相邻BDCT间系数的相关性.1.2本文提出的方法本文重点解决能有效检测一类基于DCT域的JPEG图像隐写的分析方法,提取能充分体现DCT 域块内块间相关性差分数组的转移概率矩阵二阶统计量特征.本文提出的设计能全面反映BDCT块内、块间系数相关性的特征,以更好地提高检出率.采取基于DCT域块内及块间水平、垂直和zigzag三向差分数组马尔可夫模型的通用隐写分析方法.首先,为了更有效捕捉图像BDCT块内邻近系数相关性,对图像各BDCT系数绝对值进行三向差分计算,分别提取三向差分数组一步TPM描述块内相关性特征;其次,为了更有效捕捉图像BDCT块间系数的相关性,对图像相邻BDCT块相同频率位置处系数绝对值进行三个方向的差分计算,分别提取块间三向差分系数值的一步TPM描述块间相关性特征;最后以某一方向的块内、块间TPM特征向量,经支持向量机(support vector machine,SVM)分类进行隐写分析.仿真实验结果显示,采用zigzag方向特征分类取得了相对其它方向更高的检出率,对不同隐写容量的OutGuess和F5隐写方法的检出率均高于97%.2特征构造(Feature construction)基于图像是否含有隐藏信息,图像可分为两类:无隐藏信息的掩体图像和对应的含有隐藏信息的隐写图像.所以隐写分析可以看作是一个二类模式识别问题,即将一个给定的测试图像识别为隐写图像类或非隐写图像类.因此,如同模式识别,隐写分析问题的关键问题是特征的提取.所提取的掩体图像和隐写图像特征有很大不同,不同之处越大,所取特征分类效果越好.特征应尽可能的一般化,即对不同的图像类型和不同的数据隐藏方式都是有效的.尽管上述文献中的特征都能在一定程度上检测到秘密信息的存在,但有的方法对有些隐写方法检测效果不是很令人满意.首先对测试图像进行DCT变换,建立三向差分数组,差分数组可以看作是马尔可夫随机过程.根据随机理论,马尔可夫随机过程可由概率转移矩阵来体现.由于基于DCT域的信息隐写会直接影响系数向邻近系数的转移,因此,本文将计算BDCT块内、块间差分数组沿水平、垂直和zigzag三个方向的转移概率矩阵,以转移概率矩阵为特征来揭示隐写的存在.2.1DCT块内三向差分数组为了揭示基于DCT域的一类隐写术方法对DCT块内系数之间的相关性的破坏,提取能反映DCT块内系数相关性的特征,生成块内三向系数绝对值差分数组.604信息与控制38卷读取JPEG图像,进行8×8BDCT并进行标准JPEG量化,然后各系数取绝对值,采用水平光栅扫描的方式扫描一幅图像各DCT块,设图像大小为M×N,共有l=(M×N)/64块.由于目前主流JPEG隐写方法仅针对非0的AC(alternating component)系数进行嵌入,经过实验证明,随机抽取3幅图像进行统计,DCT块前21个低频AC系数占全部非零AC系数比重达90%以上,因此对于每个DCT分块B i(s,t),i∈[1,l],s,t∈[1,8]的64维向量只取低频部分21个AC系数的绝对值分别沿横向、纵向和zigzag方向扫描生成3个1维数组B hi ,B vi,B zi,再由1维数组生成差分数组.水平1维差分数组构造公式如下:R h i (k)=B hi(k+1)−B hi(k)(1)其中,i∈[1,l],k∈[1,20],i为BDCT编号.所有块的1维差分数组组成l×202维块内水平差分数组R h.同理构造2维块内垂直和zigzag差分数组R v和R z.2.2DCT块间三向差分数组很多隐写方法刻意保持相邻系数间的统计特性以抵御基于直方图等一阶统计方法的隐写分析攻击,但不一定能保持DCT块间的相关性.为了揭示基于DCT域的一类隐写算法对DCT块间系数之间的相关性的破坏,提取相邻两个DCT块中相同频率位置系数绝对值差值构造块间2维差分数组.采用水平光栅扫描的方式扫描一幅图像各BDCT块系数绝对值,生成水平方向块间2维差分数组,每一BDCT水平差分数组构造公式如下:A h m,n (s,t)=B m,n+1(s,t)−B m,n(s,t)(2)其中,B m,n(s,t)、B m,n+1(s,t)为水平相邻两块DCT相同频率系数绝对值,m、n为DCT块的行列下标,m∈[1, M/8 ],n∈[1, N/8 −1],共计l− M/8块;s,t为在每一块中的行列下标位置,s,t∈[1,8].采用垂直光栅扫描的方式扫描一幅图像各BDCT块,生成垂直方向块间2维差分数组,每一BDCT垂直差分数组构造公式如下:A vm,n(s,t)=B m+1,n(s,t)−B m,n(s,t)(3)其中,B m+1,n(s,t)、B m,n(s,t)为垂直相邻两块DCT相同频率系数绝对值,m、n为DCT块的行列下标,m∈[1, M/8 −1],n∈[1, N/8 ],共计l−N/8块,s,t为在每一块中的行列下标位置,s,t∈[1,8].按照zigzag方向扫描一幅图像各DCT块并重新排列为l块8×8大小矩阵Z,根据Z生成zigzag方向块间2维差分数组,构造公式如下:A zi(s,t)=Z i+1(s,t)−Z i(s,t)(4)其中,Z i+1(s,t)、Z i(s,t)为zigzag相邻两块DCT系数绝对值,i为DCT块序列下标i∈[1,l],s,t为在每一块中的行列下标位置,s,t∈[1,8].将得到的每块三向块间差分2维数组转换为1维差分数组.方法为差分数组A hm,n,A vm,n,A zi的各个BDCT分别按照图1(a)、(b)、(c)所示方向扫描提取低频20个AC差分系数转换为DCT块间1维差分数组A hp(k),A vq(k),A zi(k),其中,p∈[1,l− M/8 ],q∈[1,l− N/8 ],i∈[1,l],k∈[1,20].所有块间1维差分数组组成三向块间2维差分数组A h(k),A v(k),A z(k),大小分别为(l− M/8 )×20、(l− N/8 )×20和l×20.(a)水平方向(b)垂直方向(c)zigzag方向图12维差分数组转换为1维差分数组的扫描方向Fig.1The scanning direction for translating2-D difference arrays to1-D difference arrays2.3DCT块内、块间差分数组直方图对400张风景图片隐写前后DCT块内块间水平、垂直和zigzag方向差分值的平均分布情况做仿真实验.结果显示,隐写前平均差分值接近90%集中在0值,近似拉普拉斯分布,隐写后相邻系数的相关性减弱,平均差分值集中在0值的下降到80%5期孙子文等:基于离散余弦变换域的块相关性和马尔可夫模型的图像隐写分析605(a)块内水平差分矩阵直方图(b)块间水平差分矩阵直方图图2图片隐写前后水平差分矩阵直方图Fig.2The histograms of horizontal difference matrixes before and after image steganography以下.图2显示了数据图像库[9]中00043号图片在F5隐写前后块内块间水平差分值的分布变化情况.因此可依据块内块间差分数组特征进行隐写分析.2.4阈值三向差分数组的转移概率矩阵上述差分数组具有马尔可夫随机特性.根据随机过程理论,可用转移概率矩阵来表征马尔可夫过程[7].为了消除DCT块的影响,根据各向全局差分数组计算一步转移概率矩阵(TPM).块内水平、垂直和zigzag三向差分数组的TPM计算分别见公式(5)~(7):M hR(m,n)=pR h(s,t+1)=n|R h(s,t)=m+pR h(s,t)=n|R h(s,t+1)=m=∑s,tδ(R h(s,t)=m,R h(s,t+1)=n)∑s,tδ(R h(s,t)=m)+∑s,tδ(R h(s,t+1)=m,R h(s,t)=n)∑s,tδ(R h(s,t+1)=m)(5)M vR(m,n)=p{R v(s,t+1)=n|R v(s,t)=m}+p{R v(s,t)=n|R v(s,t+1)=m}=∑s,tδ(R v(s,t)=m,R v(s,t+1)=n)∑s,tδ(R v(s,t)=m)+∑s,tδ(R v(s,t+1)=m,R v(s,t)=n)∑s,tδ(R v(s,t+1)=m)(6)M zR(m,n)=p{R z(s,t+1)=n|R z(s,t)=m}+p{R z(s,t)=n|R z(s,t+1)=m}=∑s,tδ(R z(s,t)=m,R z(s,t+1)=n)∑s,tδ(R z(s,t)=m)+∑s,tδ(R z(s,t+1)=m,R z(s,t)=n)∑s,tδ(R z(s,t+1)=m)(7)其中,δ(x=m,x =n)=1x=m且x =n0其它,δ(x=m)=1x=m0x=m(8)块间水平、垂直和zigzag三向差分数组TPM计算分别见公式(9)~(11):M hA(m,n)=pA h(s,t+1)=n|A h(s,t)=m+pA h(s,t)=n|A h(s,t+1)=m=∑s,tδ(A h(s,t)=m,A h(s,t+1)=n)∑s,tδ(A h(s,t)=m)+∑s,tδ(A h(s,t+1)=m,A h(s,t)=n)∑s,tδ(A h(s,t+1)=m)(9)M vA(m,n)=p{A v(s,t+1)=n|A v(s,t)=m}+p{A v(s,t)=n|A v(s,t+1)=m}=∑s,tδ(A v(s,t)=m,A v(s,t+1)=n)∑s,tδ(A h(s,t)=m)+∑s,tδ(A v(s,t+1)=m,A v(s,t)=n)∑s,tδ(A v(s,t+1)=m)(10)606信息与控制38卷M zA(m,n)=p{A z(s+1,t)=n|A z(s,t)=m}+p{A z(s,t)=n|A z(s+1,t)=m}=∑u,vδ(A z(s,t)=m,A z(s+1,t)=n)∑s,tδ(A z(s,t)=m)+∑s,tδ(A z(s,t)=m,A z(s+1,t)=n)∑s,tδ(A z(s+1,t)=m)(11)根据以上公式所计算的TPM是对称矩阵,因此只取下三角矩阵作为隐写分析的特征.2.5特征构造差分数组的值的变化范围较广,但是绝大多数的值都集中在一个较小的范围内(如图2),并且过大的差分值是由图像本身的内容所引起的,而非隐写嵌入过程导致的.因此,为了去除图像本身内容的影响以及缩小差分值的变化范围,以降低特征的维数,就需要对差分数组进行阈值处理,将差分值嵌位在[−T,T]范围内,再计算TPM.嵌位后TPM的维数为(2T+1)(2T+1),取上三角矩阵共(1+(2T+1))(2T+1)2维特征.分别按照下列三种方式之一提取特征:①按照公式(5)、(9)提取水平方向块内块间的TPM为特征;②按照公式(6)、(10)提取垂直方向块内块间的TPM为特征;③按照公式(7)、(11)提取zigzag方向块内块间的TPM为特征.将特征输入SVM分类器进行分类,判定图像是否是属于隐写图像类.对实验中选取的400张图片统计差分值在不同[−T,T]范围内所占比重.实验结果显示:差分值在[−5,5]范围内的比重在95%以上.对于不同T值,以块内块间zigzag差分数组的TPM为特征的检测结果见表1.由表1可知,阈值嵌位在[−5,5]范围内,特征数为132维,两种隐写方法的检出率均高于95%,而增加阈值范围到[−7,7]时,特征维数增加到240维,计算量几乎成倍增加,但检出率仅提高了1%.通过平衡特征维数和检出率指标,折中取阈值[−5,5].这样公式(5)~(11)中,m,n∈[−5,5].表1[−T,T]设置与检出率的关系Tab.1Relation between the[−T,T]setting and detection rate [−T,T][−3,3][−5,5][−7,7]特征维数56132240 OutGuess(0.1bpc)检出率94.166797.898.7212 F5(0.2bpc)检出率93.055699.21003仿真结果及检测性能分析(The simulation results and detection performance analy-sis)本实验选择400张图像,图像内容包括人物肖像、自然风景、人造设施、动物等.首先将彩色图像转换为灰度图像,进行质量因子75的JPEG压缩.用隐写软件OutGuess、F5进行隐写,对于OutGuess 方法生成嵌入率为0.05bpc、0.1bpc、0.2bpc的隐写图像各400张;用F5隐写软件生成嵌入率为0.05 bpc、0.1bpc、0.2bpc、0.4bpc的隐写图像各400张.采用任选220张原图及其相对应的220张隐写图片做训练样本;用剩余的180张原图及其相对应的180张隐写图片做检测样本.还用文[8]的方法采用相同的实验方案做实验.仿真实验结果见表2,其中TPR(true positives rate)、TNR(true negatives rate)和A(accruacy)分别表示正确接受率、正确否定率和总的检出率.表2仿真结果Tab.2The simulation results隐写方法隐写率水平方向垂直方向zigzag方向文[8]的方法bpc TPR TNR A TPR TNR A TPR TNR A TPR TNR AOutGuess 0.0599.495.097.297.895.096.499.495.097.296.796.196.4 0.198.395.69796.197.897.095.610097.897.898.998.4 0.210097.298.697.898.998.410098.999.599.498.999.2F50.0597.293.395.398.394.496.499.495.697.590.087.888.9 0.197.895.696.797.296.797.099.498.999.295.692.894.2 0.298.993.396.196.798.997.810098.399.299.498.398.9 0.410093.396.798.399.498.910099.499.7100100100表2结果表明:水平和垂直方向的特征对隐写的敏感性基本相同,zigzag方向的特征对隐写的敏感性则相对较高.这是因为对于当块间差分数组构造时,从整体上看,按zigzag方向提取相邻块的相关性比单纯从水平(或垂直)方向提取的相邻块的相关性更强:一是因为除位于图像边界的BDCT块5期孙子文等:基于离散余弦变换域的块相关性和马尔可夫模型的图像隐写分析607外,其它的块都与左下和右上两BDCT块相关,而水平(或垂直)方向的块只反映了与水平(或垂直)相邻下一块的相关性;二是因为对于差分值的计算方法,在提取的20个差分数组元素中,zigzag方向(图1(c)所示)1、5、6、14、15位置处的差分值与水平方向相同位置差分值(图1(a)中1、2、3、4、5位置处的值)是同一个值,zigzag方向(图1(c)所示)2、3、9、10、20位置处的值与垂直方向相同位置的差分值(图1(b)中1、2、3、4、5位置处的值)是同一个值,即20个zigzag方向差分值中,有5个同时体现了水平差分,有5个同时体现了垂直差分.因此,zigzag方向的特征检出率要高于以水平方向和垂直方向特征的检出率.所以,可以仅采用zigzag 方向特征作隐写分析.本文方法与文[8]的检出率相比,对于OutGuess 隐写方法的检出率相当,但对于F5隐写在低嵌入率下(0.05bpc、0.1bpc)的检出率明显高于文[8].图3显示了针对嵌入率为0.1bpc的F5隐写检测的接受者操作特性曲线(ROC,receiver operating charac-teristic)[10],漏检率和虚警率较低,显示本算法具有较好的检测性能.图3对F5隐写图像检测的ROC曲线Fig.3The ROC curve of F5stego-image detection4结语(Conlcusion)本文提出了能有效检测图像隐写的通用隐写分析方法.在图像DCT域构造体现BDCT块内相邻频率系数相关性的块内差分数组,和体现相邻BDCT 块间相同频率系数相关性的块间差分数组;用马尔可夫过程模拟差分数组,并通过差分数组阈值处理后计算一步转移概率矩阵构造隐写分析的特征,结合SVM分类器,有效地捕捉到因嵌入信息导致的图像内在统计特性的改变.实验结果表明,同已知算法比较,该算法的检测率较高、漏检率和虚警率较低,算法性能提高显著.参考文献(References)[1]Chandramouli R,Kharrazi M,Memon N.Image steganographyand steganalysis:Concepts and practice[A].Lecture Notes in Computer Science(vol.2939)[M].Berlin,Germany:Springer, 2004.35∼49.[2]Pevny T,Fridrich J.Multi-class blind steganalysis for JPEG im-ages[A].Proceedings of SPIE(vol.6072)[C].USA:SPIE,2006.257∼269.[3]Fridrich J.Feature-based steganalysis for JPEG images and itsimplications for future design of steganographic schemes[A].Lecture Notes in Computer Science(vol.3200)[M].Berlin,Ger-many:Springer,2004.67∼81.[4]平玲娣,刘祖根,史烈,等.基于易变特征实现隐藏信息的盲检测[J].浙江大学学报(工学版),2007,41(3):374∼379.[5]Liu Z G,Ping L D,Chen J,et al.Steganalysis based on dif-ferential statistics[A].Lecture Notes in Computer Science(vol.4301)[M].Berlin,Germany:Springer,2006.224∼240.[6]刘祖根,平玲娣,史烈,等.基于主元特征的隐写分析算法[J].浙江大学学报(工学版),2007,41(12):1991∼1996.[7]Shi Y Q,Chen C,Chen W.A Markov process based approachto effective attacking JPEG steganography[A].Lecture Notes in Computer Science(vol.4437)[M].Berlin,Germany:Springer, 2006.249∼264.[8]Chen C H,Shi Y Q.JPEG image steganalysis utilizing bothintrablock and interblock correlations[A].Proceedings of the 2008IEEE International Symposium on Circuits and Sys-tems[C].Piscataway,NJ,USA:IEEE,2008.3029∼3032. [9]Rocha A,Goldenstein S,Scheirer W,et al.The unseen chal-lenge data sets[A].Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Work-shops[C].Piscataway,NJ,USA:IEEE,2008.1∼8.[10]Fawcett T.ROC Graphs:Notes and Practical Considerations forData Mining Researchers[R].Palo Alto,CA,USA:HP Labora-tories,2003.作者简介:孙子文(1968–),女,博士生,副教授.研究领域为信息隐藏理论和技术,模式识别与图像处理.纪志成(1959–),男,博士生导师,教授.研究领域为网络运动控制系统,智能控制.。
用离散傅里叶变换解调数字调制信号【精选】

用离散傅里叶变换解调数字调制信号摘要:文中介绍了一种基于离散傅里叶变换的新型数字解调器的设计,并对其进行了仿真。
这种数字解调器以离散傅里叶变换为基础,通过对离散傅里叶变换结果中各次谐波幅值的判断可以很准确地从数字调制信号中将数字信号解调出。
即使是在调制信号存在很大噪声的情况下,其解调结果的误码率也很小。
由于它是对一定频率谐波振幅的分析,因此它适合于对数字二进制振幅键控(2ASK)和数字二进制移频键控(2FSK)信号的解调,是一种不同于传统数字解调器的结构既简单,性能又高的数字解调器。
关键字:傅立叶变换数字解调 FFT解调器Use Discrete Fourier Transform to demodulatedigital modulation signalAbstract:The article introduced a new design about digital signal demodulator that based on Discrete Fourier Transform, and simulated the design. This digital signal demodulator is based on Discrete Fourier Transform,from judge harmonic’s amplitude of the result of Discrete Fourier Transform, it can demodulate digital signal correctly from modulated signal . The rate of demodulation error is very low even though there are strong interference within the modulated signal. Because it is the analysis of the specific frequency harmonic amplitude, it suit for demodulating Binary Amplitude Shift Keying(2ASK) signal and Binary Frequency Shift Keying(2FSK) signal, it is a simple structure but high performance digital demodulator, which different from traditional digital demodulator.Key Words: Fourier Transform digital demodulation FFT demodulator目录一、引言-------------------------------------------------------------------------------------2二、离散傅立叶变换分析------------------------------------------2三、2ASK和2FSK 调制解调原理------------------------------------3四、数字解调器的设计--------------------------------------------3五、数字解调器仿真----------------------------------------------4六、结论--------------------------------------------------------5七、参考文献----------------------------------------------------6引言对于时间连续的信号,利用傅里叶变换可以把信号从时域转换到频域,能在频域上进行分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABSTRACTWe p re s en t a new ty pe o f di gita l D u al-Ton e Multifrequency(DTMF)detection scheme based on the Goertzel DFT algorithm.This detection scheme is more robust and cost-effective than conventional analog detection techniques.This algorithm is designed to provide optimal performance and exceed BellCore[2] specifications for DTMF detection.The problems associated with closely spaced signal frequencies and short tone duration are overcome by proper window and frame selection.Adaptive thresholding is provided to minimize false outputs due to noise and speech.The algorithm was tested with a variety of data including speech,music,and DTMF tones.Wefind that this detector is efficient,reliable,and exceeds BellCore standards.1.INTRODUCTIONThe first touch tone telephone installation was in 1963[3].DTMF signaling uses voiceband tones to send address signals and other digital information from push-button telephones and other devices such as modems and fax machines[2].Analog DTMF detection is done using bandpass filter banks with center frequencies at the DTMF signal frequencies.Analog receivers have wide tolerances to compensate for distortion caused by aging transmitters,variations in keying characteristics,and transmission line distortion. These distortions compound the problem of digital DTMF detection[4].T h e i n t r o d u c t i o n o f d i g i t a l p u l s e c o d e modulation(PCM)switches in1976signaled the beginning of the end of the analog telephone network.In the past20years telephone networks have been rapidly moving from totally analog to totally digital.In digital switching systems is desirable to treat all signals uniformly,bringing all signals through A/D converters and switching them through the PCM system[4]. Therefore the need for digital DTMF detection is justifiable to avoid the costs of hardware and D/A conversion needed to use analog detectors.With the constant advances in VLSI driving DSP costs downward,it is economically sound to replace analog detectors with their digital counterparts which are more reliable,maintenance cost effective,and spatially minimal.Several techniques for digital DTMF detection have been used,but most designers have settled on either digitalfiltering or discrete fourier transform(DFT)[4].In digital filtering,DTMF signals are passed through digital bandpass filters centered at the signaling frequencies(shades of analog).The power at each frequency is then measured repeatedly to detect the DTMF tones.A DSP then interprets and translates them for the proper switching.The DFT also measures signal power at the signaling frequencies but has the additional need to check for signals of some minimum duration. This will help to ensure robustness toward speech and noise.The DFT is the technique that is outlined in this paper.While the actual DFT is based on the aforementioned Goertzel algorithm,the windowing,level detection,and timing logic involved in developing a working design ensure that digital DTMF detection is a non-trivial problem.As can be seen in Table1,the DTMF signaling frequencies are very closely spaced.It is obvious that the bandwidth of the filter used for detection must be narrow enough to avoid any bleeding of adjacent frequencies.An even more limited bandwidth is introduced when one considers that some of today’s DTMF signal generators(phones,modems,etc.)are poorly made to such an extent that the actual frequencies generated are not as shown in Table 1.A DISCRETE FOURIER TRANSFORM BASED DIGITAL DTMFDETECTION ALGORITHMJimmy H. Beard, Steven P. Given, and Brian J. YoungThe Digital Signal Processing GroupDepartment of Electrical and Computer EngineeringMississippi State UniversityMississippi State, Mississippi 39762{beard, given, byoung}@On the other hand,the design must be efficient enough to run in real time.So we have a trade-off between the number of DFT points that must be taken to give proper bandwidth(and accurate spectrum)compared with the amount of time it takes to evaluate that number of points.BellCore[2]specifies that the bandwidth of the detection filter be within +-1.5%of the designed center frequency and must accept frequencies that fall within that range.There is also what is referred to as a rejection bandwidth beyond which the filter must attenuate any frequencies.This bandwidth is +-3.5%of the designed center frequency.Determining whether DTMF signals are present or not is done using an adaptive level detection scheme.BellCore specifies that for adaptive thresholding,the signal frequency must be present at a power level of 9dB greater than that of the other signal frequencies in the same group(high or low,see Table 1).The other power level consideration is twist.Twist is the difference between the power of the signal frequency in the low group and that of the signal frequency in the high group.Twist is defined as positive when the high frequency power level exceeds that of the low frequency and negative if the opposite is true.BellCore‘s specification for twist is +4dB to -8dB.Once a valid level is found,it is desirable to know how long the signal is present at that level.Timing is another important issue when doing DTMF detection.The duration of the signal is critical to the accuracy of the detector.BellCore.specifies several timing constraints:signal duration,interdigit time,and cycle time.According to BellCore,a DTMF detector should recognize tones of 40ms or greater.Alternatively,the detector can recognize tones with durations as low as 23ms.Any signal with a duration <23ms must be rejected.This specification is instrumental for ensuring robustness to noise and speech.Interdigit time is theHIGHLOW 1209133614771633697123A 770456B 852789C 941*#DTable 1: DTMF Frequencies andCharacter Assignmentstime between the end of one signal and the beginning of the next.Signals with interdigit times of at least 40ms must be recognized but the interdigit time may alternatively be allowed to approach zero.The cycle time is the time from the start of one signal to the start of the next.The minimum specification for cycle time is 93ms,but it also may be allowed to approach zero.We placed no bounds on interdigit or cycle time in our DTMF detector.2.THEORYThe problem addressed in this paper is how,given a digital single-channel data stream,to detect the presence of valid DTMF tones.The algorithm must be capable of accurately determining 1)which of the eight DTMF frequencies are present,2)the relative signal power at each of the frequencies,and 3)the duration that these signals are present.These signal characteristics must then be compared to industry standard criteria to determine whether a valid DTMF tone is present.Several methods exist for determining the component of a signal at a given frequency[10].The technique chosen here is the Discrete Fourier Transform (DFT).The DFT allows us to represent an aperiodic discrete signal as the algebraic sum of its frequency components.The DFT has the formx ω()x ω()e j ωn –n,n 0=N 1–∑01…N 1–,,,==Equation 1: Discrete Fourier Transformwhere x(n)is a finite duration sequence of length N,and w is the normalized radian frequency[9].Consider a signalx t ()A ω0t ()sin =The sampled signal is thenx n ()A ω0n f s-----A 2πn f f s-----sin =sin =The DFT of this signal is given byx ω0()x ω()ej ω0n–n ,n 0=N 1–∑01…N 1–,,,==Note that X(F)!=X(w).X(w)is a sinc function centered around w0with a main lobe width of1/PI=2*fs/N. Thus, X(w) approaches X(F) with increasing N.2.2.Choice Of NThere are several factors which together constrain the choice of N.First,it is clearly evident in equation3that the bandwidth of X(w)is inversely proportional to N. Given the BellCore requirement that the bandwidth be less than3%of the center frequency,N must be chosen not less than380.Other constraints on the choice of N include the DTMF tone duration.Recall that N is the number of signal samples from which the DFT is computed.A large portion of the sampled signal may contain portions of multiple key presses,which could significantly alter the resulting spectrum.Because valid DTMF tones may be as brief as forty ms,with tone to tone separation of forty ms,a value of N samples greater than321samples may span multiple key presses.The extent to which errors are induced depend on a number of factors,including the relative power levels of the input signal,the amount of overlap onto the adjacent DTMF tone, and the window function used[14]A third factor influencing the choice of N is the requirement that the DTMF detector operate in real time.Recall that the computation of the DFT is a summation of N terms.The time complexity of the best sequential algorithm for the computation of the DFT is O(N log N)[9].Obviously,as N increases,the amount of computational effort required to compute the DFT increases as well.Therefore,the value of N must be chosen sufficiently small to ensure that the detector will run in real time.3.WINDOWSWindowing is an essential consideration when performing spectral estimation.It is used to control the sidelobes of the spectral estimator[11].The magnitude of sidelobe attenuation is a large factor in DTMF detection.A DTMF detector cannot tolerate sidelobe leakage,but neither can it tolerate large mainlobe bandwidths.This is where a good balance of mainlobe bandwidth versus sidelobe attenuation must be achieved.Since the two are inversely related,this problem of windowing must be given serious consideration.The windows that were considered with this DTMF detector were:rectangular(uniform),triangle(Bartlett), Hamming(raised cosine)and Hann(squared cosine). Complete testing was only performed using the rectangular,triangular,and Hamming windows as all of the others were close derivatives of the Hamming and therefore provided insignificant performance differences.Equations2,3,and4are the weighting functions for the rectangle,triangle,and Hamming windows[11].The frequency response of these functions can be seen in Figure 1.Table2shows some characteristics of the windows thatWhich becomes[10]Xω0 ()12--AN =In this manner the amplitude of an individual frequency component can be computed.A2N---Xω0() =The signal power is then A2.2.1.Finite Sampling EffectsA consequence of approximating the infinite duration signal x(t)with the finite duration sequence x(n)of length Nis distortion.Consider again the signal x(t)=A sin(w0t).In the frequency domain,this signal can be represented as X(F)=0.5*A*delta(w+-w0).The Fourier Transform of this signal X(w) isXω()A2---c N12--+ωω–sin=w n()1n,0…N1–==Equation 2: Rectangular (Uniform)TimeWindoww n()2nN1–------------nN2---<,22nN1–------------–nN2--->,=Equation 3: Triangular (Bartlett)TimeWindow-250.0-150.0-50.050.0150.0250.0Sampling Frequency-50.0-25.00.025.050.075.0F r e q u e n c y R e s p o n s e (d B )b)-250.0-150.0-50.050.0150.0250.0Sampling Frequency-50.0-25.00.025.050.075.0F r e q u e n c y R e s p o n s e (d B )c)-250.0-150.0-50.050.0150.0250.0Sampling Frequency-50.0-25.00.025.050.075.0F r e q u e n c y R e s p o n s e (d B )a)Figure 1: Frequency response for: a) Rectangular Window, b) Triangular Window, andc) Hamming Windowwere tested.This table shows why the sidelobe attenuation characteristics of the Hamming window were preferable to the others given the slight difference in bandwidth.4.GOERTZEL’S ALGORITHM4.1.The AlgorithmThe algorithm we used to compute the Fourier transform X(w)is based substantially on Goertzel’s algorithm.Goertzel’s Algorithm.This algorithm models the computation of the DFT as a linear filtering operation [9].This operation takes the form of a parallel bank of resonators,where each resonator selects one of the frequencies of the DFT [8].The output of each of theses filters at n=N yields the value of the DFT at the frequency wk = 2*PI*k/N.The advantages of this approach over other algorithms are two-fold:1)it is computationally more efficient,and 2)the value of the DFT can be computed at any frequency desired.The extent to which the Goertzel algorithm is more efficient than other algorithms (such as Fast Fourier Transforms)depends on the number of frequencies at which the DFT is to be computed[9].Each iteration of the Goertzel algorithm requires one real multiplication and two real additions.If the value of the DFT is required at M points,then the total cost for computing the DFT is M*N multiplications and 2*M*N additions.For values of M <Log N,Goertzel’s algorithm is less expensive computationally than an FFT algorithm which is O(N*Log N).A second advantage to Goertzel’s algorithm is that,unlike FFT algorithms require N and N to be equal and a power of 2[9],Goertzel’s algorithm places no artificial constraints on these values.Hence,Goertzel’s algorithmWindowHighest Sidelobe Level Equival ent BW 1/2Power BW Rectangle -13.3 dB 1.000.89Triangle -26.5 dB 1.33 1.28Hamming-43 dB1.361.30Table 2: Characteristics of Windowsmay be used to compute the value of the DFT at any frequency,and with any value of N.This is critical in DTMF detection because the resolution between frequencies decreases as the value of N decreases.If the FFT were used,the value of the DFT could be computed only at N equally spaced frequencies,which may or may not correspond to the frequencies of interest.The fact that any value of N may be used with Goertzel’s algorithm is also highly beneficial,because,as will be shown later in this paper,the optimal range of N is about 150 - 400.Three primary factors led to the selection of this technique.First,the DFT has been shown by Proakis [9]to be a linear operation,i.e.any noise that is contained in the time-domain signal representation is not amplified in the frequency-domain by the DFT.Secondly,the DFT is well-studied,and several efficient algorithms exist to compute the DFT.4.2.The ModificationsAs previously stated,the algorithm presented here is based heavily on Goertzel’s algorithm.Several substantial modifications were made,however,to improve the overall computational efficiency of the DTMF detector.First,we recognize that we are interested in computing the DFT at a very small set of frequencies.We create an array of size eight containing only the values of k corresponding to the eight frequencies with which we are interested.The algorithm was then modified to compute the DFT at only these frequencies.Secondly,we recognized that the values of k need not be restricted to integers.This results directly from the fact that X(w)is continuous in w [9].By allowing k to take on floating point values,the DFT can be computed at precisely the frequency of interest,within roundoff error,regardless of the value of N.This single modification eliminated altogether the problems associated with frequency resolution.A third improvement came from the realization that Goertzel’s algorithm was designed to handle a complex input data sequence x(n).However,the real and complex portions of the computations are separated in the algorithm.Because samples of a real signal are real-valued,many of the computations were unnecessary and were eliminated.This effectively halved the number of computations required for each iteration.A fourth modification that was made was to precompute the phase factors Wk.This saves sixteen trigonometric evaluations per DFT computation,at a cost of the storage of sixteen floating point numbers.Finally,the algorithm was modified to extract the inputEquation 4: Hamming(Raised Cosine)Windoww n ()0.540.46ωnN ---cos +=sequence x(n)from a circular buffer.The original Goertzel algorithm assumes that the data is stored in a vector with x(0)located in element0of the vector. LiNear storage of the data proved to be awkward,at best.The entire vector had to be reconstructed each time the DFT was to be ing a circular buffer, only`stale’data need be changed as new data is received, while updating the pointers appropriately.5.EV ALUATION5.1.Different Window FunctionsOne of the most important issues that was contended with was which window yields the best results.The key parameter focused on during testing was the window size(N)[11].We tested each window using values of N ranging from50to450(figure4).These were the values that we determined would keep us within bandwidth specification and still allow us to run in real time. Certain other values of N were chosen to optimize the placement of the zero locations in the frequency domain.Figures4-6illustrate the relative sidelobe attenuation for the rectangular,triangular,and Hamming windows.It can be seen that the Hamming window provides superior sidelobe attenuation at the adjacent DTMF signal frequencies[14].5.2.Data GenerationSeveral methods were used to produce data which was used to test the DTMF puter programs were written in C++to generate a sampled sinusoidal signal sequence.The amplitudes and frequencies of the sinusoidal signals were varied and approximately100 files were generated containing a variety of tones,tone spacings, and tone durations.A simulation was then done using eachfile as input data to the DTMF detector and the results were recorded. Next,a noise file of approximately ten second duration was recorded using an inexpensive clock-radio tuned to no station as a noise source.This file was then summed with each of the computer-generated signalfiles to form noisy data files of specified signal-to-noise ratio. Simulations were done with SNRs ranging from-30to 30,in steps of5dB,and the results were recorded.Real DTMF data was then collected by originating a normal voice call over the public switched network,and recording the keypresses using the Sony DAT system. Several recordings were made,using several different telephone sets.DTMF tones were generated by cycling through the keypad several times,as well as by entering valid seven-and eleven-digit telephone numbers.The algorithm was simulated using these recorded files,and the results were noted.Each of these files was then combined in various ratios with the noisefile previously described to again create noisy data.Simulations were done with SNRs ranging from-30to30and the results were noted.Figure3shows the signal-to-noise ratio versus percent error for various windows.The detector performs perfectly for SNRs down to10dB as can be seen in figure 2.Software Generated Data100 files7 windows100 files with noise7 windows Recorded Data Phone 13files(92key presses)Phone 22 files(124 keypresses)Phone 31 file(99 key presses) Speech Data151 files(0 key presses) Music and Speech Data25 files(0 key presses)Table 3: Testing DatabaseWindowsSNR Rectangle TriangleHamming30000230002000010000071111-1084.589.792.2-20100100100-30100100100Table 4: Percent Error for different SNRs and Windows-40.0-20.00.020.040.0SNR0.020.040.060.080.0100.0P e r c e n t E r r o rRectangular Triangular HammingFigure 2: Percent Error VS SNR0.0100.0200.0300.0400.0N0.020.040.060.080.0100.0P e r c e n t E r r o rPercent Error VS NRectangular Hamming TriangularFigure 3: Percent Error VS N0.0500.01000.01500.02000.0Time-50.0-40.0-30.0-20.0-10.00.0D F T M a g n i t u d e (d B )f=697 Hz f=770 Hz f=852 Hz f=941 HzFigure 4: Rectangular Window0.0500.01000.01500.02000.0Time-50.0-40.0-30.0-20.0-10.00.0D F T M a g n i t u d e (d B )f=697 Hz f=770 Hz f=852 Hz f=941 HzFigure 5: Triangular Window N=3300.0500.01000.01500.02000.0Time-40.0-30.0-20.0-10.00.0D F T M a g n i t u d e (d B )Hamming Window N=330f=697 Hz f=770 Hz f=852 Hz f=941 HzFigure 6: Hamming Window N=330The DTMF detector was also evaluated for real time operation.Data was taken from a touch-tone telephone via a microphone and an A/D converter.The narecord program was used to set the channel preference and sample frequency and pipe the sampled data to the detector.The pipe command was also utilized to send files to the input of the detector for real time testing. The two parameters that affected real time operation were N(total number of points computed)and the size of sliding window(number of points computed each iteration).Real time performance deteriorates as N grows large(>400)or the sliding window size grows small(<64).This highlights the interdependence between parameters.Decrease N for real time and the bandwidth grows large accordingly.6.SUMMARYTesting and evaluation resulted in the Hamming window being chosen for this detector.The frame size used is N=330.For this value:the bandwidth is acceptable,real time operation is achieved,and the adjacent frequencies fall in or very near to the null.A sliding window size of 80was chosen because this value was small enough ensure that the detector would always detect signal durations of40ms.Lower values of N compromise speech and noise immunity.Higher values of N slow processing and decrease the bandwidth to the extent that telephones with any deviation from ideal DTMF signal frequencies cannot be detected.Testing revealed inadequacies in the generation of DTMF frequencies by signalling devices.It was found that several telephones that were tested actually produced frequencies that were significantly out of specified ranges.Because of this fact,we began to look for windows with wider bandwidths to compensate for this deviation and increase detector accuracy.This detector was tested extensively with computer generated and real data.It performed flawlessly on all data in table3.It registered zero misses on data with signal-to-noise ratios as low as10dB.The detector experienced no failures due to music or talk-off.This detection scheme is more robust and cost-effective than conventional analog detection techniques.The algorithm was tested with a variety of data including speech,music,and DTMF tones.We find that this detector is efficient,reliable,and exceeds BellCore standards for DTMF detection.7.ACKNOWLEDGEMENTSWe would like to thank Dr.Joseph Picone for his guidance and patience throughout this project.We would also like to thank Dr.and Mrs.Picone for their help in data collection and the use of their telephones and recording equipment.We wish to thank Dr.William J.Ebel for his support, ideas,and the use of his personal library.We also want to acknowledge the staff of ISIP for their technical support,and especially Mary Weber for her help in scanning images.REFERENCES Telephony:1.Digital Simulation Test Tape.”Bell CommunicationResearch Technical Reference TR-TSY-D00763, Issue 1, July 1987.2.“Dual-Tone Multifrequency Receiver GenericRequirements for End-to-End Signaling Over Tan-dem-Switched V oice Links.”Bell Communications Research Technical Reference TR-TSY-000181, Issue 1, March 1987.3.Noll,A.Michael.Introduction to Telephones andTelephone Systems. Artech House, Inc., 1986.4.Keiser,Bernhard E.and Strange,Eugene.DigitalTelephony and Network Integration.Van Nostrand Reinhold Company, 1985, pp. 289-90, 306-7.5.Freeman,Roger L.Telecommunication System Engi-neering:Analog and Digital Network Design.John Wiley & Sons, 1980, pp. 377-8.Digital Signal Processing:6.Blahut,Richard E.Fast Algorithms For Digital SignalProcessing.Addison-Wesley Publishing Co.,Inc., 1985, pp. 131-2.7.Manolakis,Dimitris G.and John G.Proakis.DigitalSignal Processing.2nd edition.Macmillan Publish-ing Co., 1992.8.Burrus,C.S.and T.W.Parks.DFT/FFT and Convolution Algorithms:Theory and Implementations.Texas Instruments, Inc., 1985, pp. 32-36.9. Marple, S. Lawrence Jr.Digital Spectral Analysis.Prentice-Hall, Inc., 1987, pp. 136-44.10.Oppenheim,Alan V.and Schafer,Ronald W.DigitalSignal Processing. Prentice-Hall of India, 1989. Systems:11.Fannin,D.Ronald,Tranter,William H.,Ziemer,Rodger E.Signals and Systems:Continuous and Discrete,3rd Ed.MacMillan Publishing Incorpo-rated, 1993, pp. 486-501, 523-525.12.Tranter,W.H.and Ziemer,R.E.Principles of Com-munications Systems,Modulation and Noise.Houghton Mifflin Company, 1990.WWW Sites:13. TI. .14.Programming in C./Dave/C/CE.html.15.Introduction to Signal Processing.http://www-/gopher/ftp/pub/sjo/intro2sp.html.。