Contiki实验2 - 问题timer
延迟选择量子擦除实验的原理

延迟选择量子擦除实验的原理1.引言1.1 概述概述部分的内容可以介绍延迟选择量子擦除实验的背景和基本概念。
以下是一个示例:延迟选择量子擦除实验是近年来量子力学研究领域中备受关注的一个重要研究方向。
在量子力学中,量子擦除是指通过特定方法将量子态中的信息擦除掉,使其无法被测量得到。
这种概念最早由数理逻辑学家H. P.鲍姆加特纳于1966年提出。
而延迟选择实验是由约翰·厄尔·尔文在1978年首次提出的,他认为通过延迟操作以及干涉现象的利用,可以在测量之前实现对量子系统的选择。
延迟选择量子擦除实验所涉及的原理和技术已经引起了广泛的研究兴趣,并在量子信息科学及量子计算等领域引起了革命性的变革。
通过延迟选择量子擦除实验,研究者们希望探索量子力学中的概率性和测量时刻的关系,以及对观测结果的影响。
在延迟选择量子擦除实验中,通过精心设计的实验设置,可以实现对粒子在穿越一个或多个干涉装置后的选择性测量。
这些实验不仅能够验证量子力学的基本原理,还可以帮助我们更好地理解量子世界的性质和奇异性。
本文将主要讨论延迟选择量子擦除实验的原理和相关概念,以及其对量子力学研究的意义和可能的应用。
通过对已有研究成果的综述和分析,我们将全面评估这一实验方法的优势和局限性,并对未来的研究方向进行展望。
希望通过本文的阐述,读者可以对延迟选择量子擦除实验有更深入的理解,并进一步认识到这一领域的重要性和潜在价值。
延迟选择量子擦除实验的研究将不仅为量子力学的发展提供新的启示,也为未来量子通信、量子计算等领域的应用提供了新的可能性。
文章结构的部分是为了提供读者一个清晰的写作计划和组织结构。
以下是1.2文章结构部分的内容:1.2 文章结构本文将按照以下结构来呈现延迟选择量子擦除实验的原理:1. 引言:在引言部分,将会对延迟选择量子擦除实验的背景和意义进行简要介绍,概述本文将要讨论的内容。
2. 正文:正文部分将会详细阐述延迟选择实验和量子擦除实验的概念和原理。
Contiki学习笔记(重写版)

2.1 运行原理
嵌入式系统可以看作是一个运行着死循环主函数系统,Contiki 内核是基于事 件驱动的,系统运行可以视为不断处理事件的过程。Contiki 整个运行是通过事件 触发完成,一个事件绑定相应的进程。当事件被触发,系统把执行权交给事件所 绑定的进程。一个典型基于 Contiki 的系统运行示意图如下:
I
图表目录
图 2- 1 CONTIKI 运行原理示意图 ................................................................................... 4 图 2- 2 THREAD 与 PROTOTHREADS 栈对比示意图 ........................................................ 5 图 2- 3 CONTIKI 进程链表 PROCESS_LIST........................................................................ 7 图 2- 4 CONTIKI 进程状态转换图 ................................................................................... 8 图 2- 5 函数 PROCESS_START 流程图 ............................................................................ 10 图 2- 6 CALL_PROCESS 流程图........................................................................................11 图 2- 7 EXIT_PROCESS 流程图 ........................................................................................ 12 图 2- 8 CONTIKI 事件队列示意图 ................................................................................. 13 图 2- 9 PROCESS_POST 函数流程图 ............................................................................... 14 图 2- 10 DO_EVENT 函数流程图 .................................................................................... 15 图 2- 11 TIMER 链表 TIMER_LIST 示意图 ....................................................................... 16 图 2- 12 ETIMER_SET 流程图 ......................................................................................... 17 图 2- 13 ETIMER_PROCESS 的函数 THREAD 流程图....................................................... 18 图 2- 14 RIME 协议栈结构框图 .................................................................................... 19 图 2- 15 OPEN、COON、CALLBACKS 对应关系............................................................. 21 图 2- 16 RECV 函数流程图 ............................................................................................ 23
实验15—基于IPv6模块的进程间交互的实验讲解

实验题目:实验15—基于IPv6模块的进程间交互的实验实验时间:2016.1.4一、实验目的:了解Cygwin开发环境及Contiki系统相关内容。
了解Contiki系统进程间交互的理论掌握IPv6模块的编程及下载使用方法。
二、实验原理及程序分析:1、Contiki 中事件驱动和protothread机制Contiki的两个主要机制:事件驱动和protothread机制,前者是为了降低功耗,后者是为了节省内存。
事件驱动嵌入式系统常常被设计成响应周围环境的变化,而这些变化可以看成一个个事件。
事件来了,操作系统处理之,没有事件到来,就跑去休眠了(降低功耗),这就是所谓的事件驱动,类似于中断。
1、事件结构体各成员变量含义如下:ev-----标识所产生事件data---保存事件产生时获得的相关信息,即事件产生后可以给进程传递的数据p------指向监听该事件的进程2、事件分类事件可以被分为三类:时钟事件(timer events)、外部事件、内部事件。
那么,Contiki核心数据结构就只有进程和事件了,把etimer理解成一种特殊的事件。
3、事件队列Contiki用环形队列组织所有事件(用数组存储),如下:图示事件队列如下:4、系统定义的事件系统定义了10个事件,源码和注释如下:注:PROCESS_EVENT_EXIT 与PROCESS_EVENT_EXITED区别事件PROCESS_EVENT_EXIT 用于传递给进程的主体函数thread,如在exit_process函数中的p->thread(&p->pt, PROCESS_EVENT_EXIT, NULL)。
而PROCESS_EVENT_EXITED用于传递给进程,如call_process(q, PROCESS_EVENT _EXITED, (process_data_t)p)。
(助记:EXITED 是完成式,发给进程,让整个进程结束。
摩擦系数连续测量软件中Timer控件的应用

Ab t a t Th o t r y t m o h a u e n ff ito o fi in s d v l p d b m p o s r c : e s f wa e s s e f r t e me s r me to rc i n c e f e t i e e o e y e l — c y n B . n CI 7 2 a a c l c i n c r . I h s s s e ,l n —i ea d c n i u u e ~ i e i g V 6 0 a d P 一 4 2 d t o l to a d n t i y t m e o g tm n o tn o s r a t m
可 以应 用 到其 它机 械量 的测 量 程序 中 。摩擦 系数 测
1 引 言
在 生 产 、 械研 究 和 实 验 中有 很 多 机 械量 需 要 机 长时 间连续 、 时地 测量 , 能反 映 出被测 机械 量 的 实 才
量 系统 的原 理 图如 图 1所示 。
摩 擦 系 数 测量 软 件 系 统 的 主要 功 能 有 : 摩擦 系 数 曲线 图 的实 时显示 , 如图 2所示 ; 擦 系数 曲线 图 摩 的 自动保 存 ; 擦 系数 数 据 的 自动 保 存 , 图 3所 摩 如 示; 摩擦 系数 数 据分 析及 自动 保存 ; 保存 的数 据离 对 线分 析 ; 根据 保存 的数 据 再 生 放 大 的 摩 擦 系数 曲线
Ke wo ds c n i u u e ltme d t- olci n a &p e e v to VB . tme o to s mu tme i i r y r : o tn o sra- i a a c l to - n r s r ain; e 6 0;i rc n r l ; li datme
UML实验二

UML实验二第一篇:UML实验二实验2 用例图一、实验目的1.学会分析系统中的参与者和用例2.掌握用例图的绘制方法3.掌握需求分析阶段的用例建模二、实验器材1.计算机一台;2.StarUML工具软件。
三、实验内容1.画出ATM系统的用例图2.完成ATM系统用例的事件流描述3.完成网络教学系统的用例建模4.完成学生课程注册系统的用例建模四、ATM系统的用例建摸1.分析ATM自动取款机:客户可以取钱,存钱,查询余额,转帐,修改密码。
通过分析可找出如下几个参与者:(1)ATM(2)客户通过分析得到如下用例:(1)存款(2)取款(3)查询余额(4)转帐(5)修改密码(6)打印收据 2.绘图步骤:下面介绍在StarUML中创建用例图的过程:(1)在“Use Case View”中双击Main图,双击图标,出现图1,为编辑用例图做准备。
图1(2)在用例视图中,从工具栏中选择Actor图标,在右边的绘图区中添加一个新元素,并取名客户表明新增一个参与者,如图2所示。
图2(3)同样的方法添加参与者“ATM”,如图3所示。
图3(4)在工具栏上选择用例的图标,依次添加存款、取款、查询余额、转帐、修改密码、打印收据,如图4所示。
图4(5)添加参与者和用例间的关联关系,如图5所示。
图5 依照个人理解,增加一些功能或修改该用例图。
(增加的功能或修改的用例图放在此处)参照如下的取款用例的事件流描述,给出ATM系统的其它用例的事件流描述。
1)通过读卡机,储户插入ATM卡2)ATM系统从卡上读取银行ID、帐号、并验证帐号。
3)储户键入密码,系统检验密码。
4)储户按确认键,输入取款金额。
5)ATM把帐号和取款金额传递给银行系统,取回帐户余额。
6)ATM输出现金,并显示帐户余额。
7)ATM记录事务到日志文件。
(ATM系统的其它用例的事件流描述放在此处)登录用例的事件流:1)通过读卡机,储户插入ATM卡2)ATM系统从卡上读取银行ID、帐号、并验证帐号。
Contiki入门手册
Contiki OS入门手册
第 1 页, 共 28 页
Contiki OS 入门手册
目录
1 源代码目录结构说明...............................................................................................................3 2 Hello-world实验教程 ..............................................................................................................7 3 Blink-hello实验教程..............................................................................................................11 4 Event-post实验教程 ..............................................................................................................16 5 Timers实验教程.....................................................................................................................21
Contiki操作系统是基于事件驱动(Event-driven)内核的操作系统,在此内核上,应用 程序可以在运行时动态加载,非常灵活。在事件驱动内核基础上,Contiki实现了一种轻量级 的名为protothread的线程模型,来实现线性的、类似于线程的编程风格。该模型类似于Linux 和windows中线程的概念,多个线程共享同一个任务栈,从而减少RAM占用。Contiki还提供 一种可选的任务抢占机制、基于事件和消息传递的进程间通信机制。Contiki中还包括一个可 选的GUI子系统,可以提供对本地串口终端、基于VNC的网络化虚拟显示或者Telnet的图形 化支持。
实验二 答案
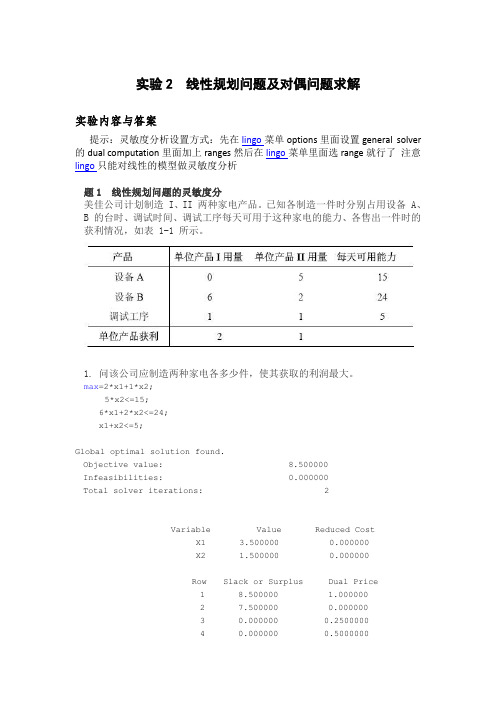
实验2 线性规划问题及对偶问题求解实验内容与答案提示:灵敏度分析设置方式:先在lingo菜单options里面设置general solver 的dual computation里面加上ranges然后在lingo菜单里面选range就行了注意lingo只能对线性的模型做灵敏度分析题1 线性规划问题的灵敏度分美佳公司计划制造 I、II 两种家电产品。
已知各制造一件时分别占用设备 A、B 的台时、调试时间、调试工序每天可用于这种家电的能力、各售出一件时的获利情况,如表 1-1 所示。
1.问该公司应制造两种家电各多少件,使其获取的利润最大。
max=2*x1+1*x2;5*x2<=15;6*x1+2*x2<=24;x1+x2<=5;Global optimal solution found.Objective value: 8.500000Infeasibilities: 0.000000Total solver iterations: 2Variable Value Reduced CostX1 3.500000 0.000000X2 1.500000 0.000000Row Slack or Surplus Dual Price1 8.500000 1.0000002 7.500000 0.0000003 0.000000 0.25000004 0.000000 0.50000002. 如果资源出租,资源出租的最低价格至少是多少(即每种资源的影子价格是多少)。
min=15*y1+24*y2+5*y3;6*y2+y3>=2;5*y1+2*y2+y3>=1;Global optimal solution found.Objective value: 8.500000Infeasibilities: 0.000000Total solver iterations: 3Variable Value Reduced CostY1 0.000000 7.500000Y2 0.2500000 0.000000Y3 0.5000000 0.000000Row Slack or Surplus Dual Price1 8.500000 -1.0000002 0.000000 -3.5000003 0.000000 -1.5000003.若家电 I 的利润不变,家电 II 的利润在什么范围内变化时,则该公司的最优生产计划将不发生变化。
Timer2

13
Timer2
2004 Microchip Technology Inc.
DS31013A_CN 第 13-5 页
PICmicro 中档单片机系列
13.9 设计技巧
当前没有相关的设计技巧。
DS31013A_CN 第 13-6 页
2004 Microchip Technology Inc.
第 13 章 Timer2
目录
本章包括以下一些主要内容: 13.1 13.2 13.3 13.4 13.5 13.6 13.7 13.8 13.9 13.10 13.11 简介 .......................................................................................................................... 控制寄存器 ............................................................................................................... 定时器时钟源............................................................................................................ 定时器 TMR2 和 PR2 周期寄存器 ............................................................................ TMR2 匹配输出 ........................................................................................................ 将 Timer2 的预分频器和后分频器清零...................................................................... 休眠操作 ................................................................................................................... 初始化 ...................................................................................................................... 设计技巧 ................................................................................................................... 相关应用笔记............................................................................................................ 版本历史 ................................................................................................................... 13-2 13-3 13-4 13-4 13-4 13-4 13-4 13-5 13-6 13-7 13-8
无线传感器网络课件:Contiki操作系统

Contiki操作系统
2.3 安 装
Contiki操作系统
目前,Contiki操作系统开发小组将Contiki源码托管到github中。为了方便开发,我们需 要将Contiki操作系统的源码部署到本地。Cotniki源码默认环境为Linux操作系统,本节还将 介绍在Windows系统下的环境部署。
创建进程(还未投入运行)以及进程退出(此时进程还没从进程链表中删除)时,进程状态 都为PROCESS_STATE_NONE。
Contiki操作系统
1.进程初始化 系统启动后需要先将进程初始化,通常在主函数main()中调用函数process_init(),进程 初始化主要完成事件队列和进程链表初始化,将进程链表头指向NULL,当前进程也设为 NULL。 2.创建进程 创建进程实际上是定义一个进程控制块和进程执行体的函数,PROCESS宏实际上声明 了一个函数并定义了一个进程控制块,新创建的进程next指针指向NULL,进程名称为Hello world,进程执行体函数指针为process_thread_hello_world_process,保存行数的pt为0,状态 为0,优先级标记位needspoll也为0。PROCESS定义了结构体并声明了函数,还需要实现该 函数,通过宏 PROCESS_THREAD来实现。宏PROCESS_BEGIN包含switch(process_pt->lc) 语句,这样被中断的进程将再次获得执行并可通过 switch 语句跳转到相应的case,即被中断 的行。 3.启动进程 函数process_start()用于启动一个进程,首先判断该进程是否已经在进程链表中,然后将 进程加到链表,给该进程发一个初始化事件PROCESS_EVENT_INIT。
Contiki操作系统
Contiki实验1-问题

1.printf为什么从串口输出printf函数是调用putchar实现字符数据传送的。
我们只要重写putchar 函数,就可以对printf进输出重定向。
printf函数是在stdio.h文件中定义的,因为printf支持重定向,printf输出会由putchar函数(位于platform->cc2530dk->debug.c->大概位置为91行)控制,Contiki对putchar 做了重定义,在putchar里又调用了putchr函数(位于platform->cc2530dk->debug.c->大概位置为20行),在putchr函数中就可以看到数据是从串口0输出的。
参考:C51重定向printf到串口:https:///yannanxiu/article/details/52438351附加:串口的波特率是在哪里设置的?在cpu->cc253x->dev->usart0.c中,uart0_init()函数,2.tcp/ip协议栈在哪里从contiki-main.c的netstack_init()(第254行),选中之后按F12,或者右键->Go to Definition of netstack_init,可以看到函数的定义,这就是tcp/ip协议栈。
3.autostart_start自启动是如何启动的?调用的函数位于conti-main.c->autostart_start(autostart_processes);(276行),选中之后按F12,或者右键->Go to Definition of autostart_start,可以进入定义。
函数内容是,遍历自启动程序的数组,然后调用process_start 启动程序。
自启动程序的数组可以在任一使用到AUTOSTART_PROCESSES,选中之后按F12,或者右键->Go to Definition of,可以看到autostart_processes数组的定义。
WSN 操作系统-contiki

• 测试contiki cd contiki/examples/hello-world make TARGET=native hello-world ./hello-world.native
Small devices c compiler:SDCC
(1)下载SDCC cd /opt sudo svn co -r 7100 https:///svnroot/sdcc/tr unk/sdcc/
• System is programmed by uploading the binary – In-system programming tools or external flashers
Cross-compiler Environments
• Integrated development environments (IDEs) – Commercial compilers are usually of this type – Usually dependent on a specific OS (Windows) – Integrate a text editor, compiler tools and project management along with C library – System programmer tool usually tightly integrated
6LoWPAN

Smart Machines
1
目录
• 公司简介 • Smart Machines物联网开发工具及平台 • 设备的系统架构(软件)
• Smart Machines采用的实时操作系统 • 注意软件并行处理
• 开发嵌入式软件
• 嵌入式开发流程 • 开发6LoWPAN软件 • 了解contiki 和uIPv6
16
版权 © 2011 Smart Machines 保留所有权利
安装开发环境(三)
8、给SG-500网关和智能电开关节 点加电, 在PC下通过访问网关的网址即 可浏览智能电开关监控网页, 同时可以对智能电开关进行开 关控制。 显示界面如下图所示:
17
版权 © 2011 Smart Machines 保留所有权利
• 开始动手
• • • • • 开发环境要求 安装开发环境 开发环境测试 Contiki分析 范例
2
版权 © 2011 Smart Machines 保留所有权利
公司简介
• Smart Machines 专注于物联网sub 1G频段 • 支持Zigbee,IPv6/6LoWPAN,IEEE802.15.4(c) • 官网是一个 物联网的职业服务社交平台。您在此不但 可以学习还可以找到志同道合的朋友合作, 到论坛找答案或提供帮助,利用微博和发 表文章,打造您个人品牌。还可以发布/寻 找物联网工作哦。 • 我司提供客户定制产品,技术咨询,集成 销售等服务。 • 凝聚所有对物联网有兴趣者的力量,一起 开发销售,分享成果。
21
版权 © 2011 Smart Machines 保留所有权利
Contiki范例解析(三)
• 选择的目标platform是avr-rcb,其对应 \platform\avr-rcb • UIP_CONF_IPV6表示加入对IPv6的支持。 • CONTIKI定义了contiki系统路径。 • CONTIKI_ROLE指定了本应用的角色是gateway。此 定义会被\platform\avr-rcb\ Makefile.avr-rcb用来产 生platform相关的编译标志,如:CFLAGS += DGATEWAY。 • Makefile.include是contiki的makefile的系统公用部分。 此Makefile的分析,请参考下一节 Makefile.include。 • 对应makefile中指定的platform,整个应用的起点是 \platform\avr-rcb\contiki-rcb-main.c中的main()。
基于IPv6的Contiki系统入门实验课案
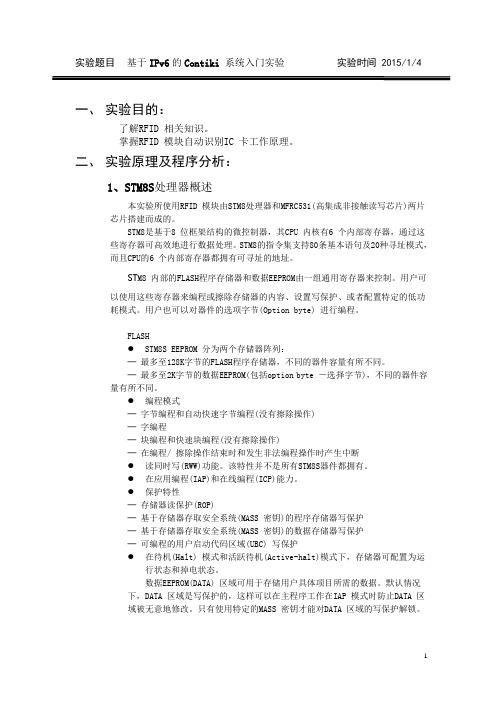
实验题目基于IPv6的Contiki 系统入门实验实验时间 2015/1/4一、实验目的:了解RFID 相关知识。
掌握RFID 模块自动识别IC 卡工作原理。
二、实验原理及程序分析:1、STM8S处理器概述本实验所使用RFID 模块由STM8处理器和MFRC531(高集成非接触读写芯片)两片芯片搭建而成的。
STM8是基于8 位框架结构的微控制器,其CPU 内核有6 个内部寄存器,通过这些寄存器可高效地进行数据处理。
STM8的指令集支持80条基本语句及20种寻址模式,而且CPU的6 个内部寄存器都拥有可寻址的地址。
ST M8 内部的FLASH程序存储器和数据EEPROM由一组通用寄存器来控制。
用户可以使用这些寄存器来编程或擦除存储器的内容、设置写保护、或者配置特定的低功耗模式。
用户也可以对器件的选项字节(Option byte) 进行编程。
FLASH●STM8S EEPROM 分为两个存储器阵列:─最多至128K字节的FLASH程序存储器,不同的器件容量有所不同。
─最多至2K字节的数据EEPROM(包括option byte -选择字节),不同的器件容量有所不同。
●编程模式─字节编程和自动快速字节编程(没有擦除操作)─字编程─块编程和快速块编程(没有擦除操作)─在编程/ 擦除操作结束时和发生非法编程操作时产生中断●读同时写(RWW)功能。
该特性并不是所有STM8S器件都拥有。
●在应用编程(IAP)和在线编程(ICP)能力。
●保护特性─存储器读保护(ROP)─基于存储器存取安全系统(MASS 密钥)的程序存储器写保护─基于存储器存取安全系统(MASS 密钥)的数据存储器写保护─可编程的用户启动代码区域(UBC) 写保护●在待机(Halt) 模式和活跃待机(Active-halt)模式下,存储器可配置为运行状态和掉电状态。
数据EEPROM(DATA) 区域可用于存储用户具体项目所需的数据。
默认情况下,DATA 区域是写保护的,这样可以在主程序工作在IAP 模式时防止DATA 区域被无意地修改。
使用 timer 对内部低速时钟的校准方法
使用 Timer 对内部低速时钟的校准方法在现代科技的发展中,时钟的准确性是至关重要的。
无论是在计算机系统、移动设备还是各种精密仪器中,时钟都扮演着至关重要的角色。
然而,由于各种因素的影响,内部低速时钟通常会存在一定的误差,这就需要对其进行校准,以保证时钟的准确性。
而其中一种常见的校准方法就是使用 Timer。
1. Timer 的作用Timer 是一种在计算机系统中常见的定时器,用于测量或控制时间间隔。
它可以在一定的时间间隔内产生中断信号,从而实现对系统中各种时间相关的操作的控制和测量。
在校准内部低速时钟时,我们可以利用 Timer 来测量内部时钟的频率和实际时间之间的偏差,从而进行校准。
2. 校准方法对内部低速时钟进行校准,首先需要确定一个参考时间源,可以是外部高精度时钟或网络时间服务器等。
利用 Timer 定期测量内部时钟产生的脉冲或计时信号,与参考时间源的时间进行比较。
通过不断调整内部时钟的频率或计数,使其与参考时间源的时间保持一致,从而实现校准。
3. 注意事项在使用 Timer 对内部低速时钟进行校准时,需要注意以下几点:- 精度要求:校准过程中需要考虑所需的时钟精度。
对于一些对时钟要求较高的应用,可能需要使用更精确的参考时间源和更精密的Timer 设备。
- 校准算法:校准的算法需要根据具体的应用情况来选择,可以是简单的频率调整,也可以是复杂的相位调整等。
- 稳定性:校准后的内部时钟需要具有较好的稳定性,能够在长时间内保持准确。
4. 个人观点使用 Timer 对内部低速时钟进行校准是一种简单有效的方法,可以在较低的成本下实现对时钟精度的提高。
校准过程中需要结合实际应用情况,选择合适的校准算法和参考时间源,以实现最佳的校准效果。
在实际应用中,可以根据需求和成本来平衡校准的精度和复杂度,以达到最佳的校准效果。
总结回顾通过使用 Timer 对内部低速时钟进行校准,可以有效提高时钟的准确性,满足各种应用对时钟精度的要求。
2-SAT(心累时学习的算法)
2-SAT(⼼累时学习的算法)今年noi考了⼀道2-SAT裸题,害怕今年省选会出到,只能填坑SAT是适定性(Satisfiability)问题的简称。
⼀般形式为k-适定性问题,简称 k-SAT。
当k>2时,k-SAT是NP完全的。
因此⼀般讨论的是k=2的情况,即2-SAT问题。
2-SAT,简单的说就是给出n个集合,每个集合有两个元素,已知若⼲个2-SAT问题现有⼀个由N个布尔值组成的序列A,给出⼀些限制关系,⽐如A[x] AND A[y]=0、A[x] OR A[y] OR A[z]=1等,要确定A[0..N-1]的值,使得其满⾜所有限制关系。
这个称为SAT问题,特别的,若每种限制关系中最多只对两个元素进⾏限制,则称为2-SAT问题。
由于在2-SAT问题中,最多只对两个元素进⾏限制,所以可能的限制关系共有11种:A[x]NOT A[x]A[x] AND A[y]A[x] AND NOT A[y]A[x] OR A[y]A[x] OR NOT A[y]NOT (A[x] AND A[y])NOT (A[x] OR A[y])A[x] XOR A[y]NOT (A[x] XOR A[y])A[x] XOR NOT A[y]注意:这⾥的OR是指两个条件⾄少有⼀个是正确的⽐如x1和x2⼀共有三种组合满⾜“x1为真或x2为假”:x1=1,x2=1x1=1,x2=0x1=0,x2=02-SAT的解决⽅法有很多,由于博主⽐较蒟,所以就选择⼀种简单易懂的介绍⼀下:算法构造⼀个有向图G,每个变量xi拆成两个点2i和2i+1分别表⽰xi为假,xi为真那么对于“xi为真或xj为假”这样的条件我们就需要连接两条边2*i —>2*j(表⽰如果i为假,那么j必须是假)2*j+1—>2*i+1(表⽰如果j为真,那么i必须是真)这就有点像推导的过程实际上每⼀个限制条件都会对应两条“对称”的边接下来逐考虑每个没有赋值的变量,设为x我们先假定x为假(为什么⼀定是假,约定俗成了)之后沿着从ta出发的有向边进⾏标记如果在标记过程中,发现有⼀个点的两种状态都被标记过了那么我们之前的假设就被推翻了需要改成x为真,重新标记如果发现⽆论这个点赋值成真还是假,都会引起⽭盾可以证明这个2-SAT⽆解可能我的叙述有点容易让读者yy但是⼀定要注意:这个算法没有回溯过程下⾯给出代码:struct TwoSAT{int n;vector<int> G[N*2];bool mark[N*2];int S[N*2],c;int dfs(int x){if (mark[x^1]) return 0;if (mark[x]) return 1; //和假设的值⼀样mark[x]=1;S[c++]=x;for (int i=0;i<G[x].size;i++)if (!dfs(G[x][i])) return 0;return 1;}//x=xval or y=yvalvoid add_clause(int x,int xv,int y,int yv){x=x*2+xv;y=y*2+yv;G[x^1].push_back(y);G[y^1].push_back(x);}void init(int n){this->n=n;for (int i=0;i<2*n;i++) G[i].clear();memset(mark,0,sizeof(mark));}bool solve(){for (int i=0;i<2*n;i+=2) //枚举每⼀个点if (!mark[i]&&!mark[i+1]) //没有标记{c=0;if (!dfs(i)){while (c>0) mark[S[--c]]=0; //清空标记 if (!dfs(i+1)) return 0;}}return 1;}};。
影响tcp效果的因素实验
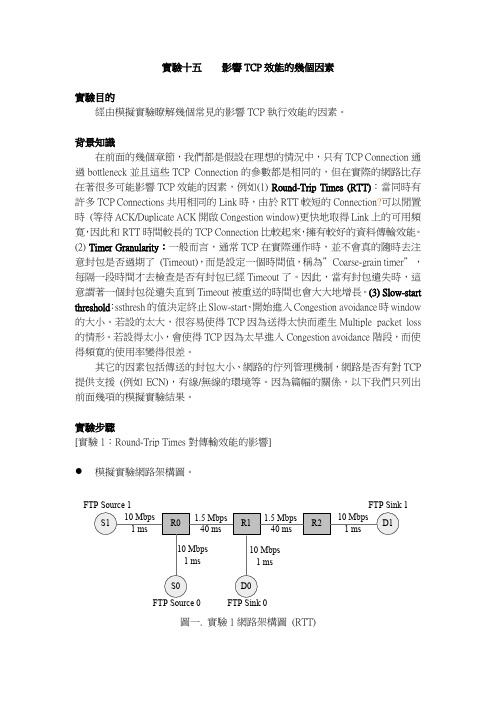
實驗十五影響TCP效能的幾個因素實驗目的經由模擬實驗瞭解幾個常見的影響TCP執行效能的因素。
背景知識在前面的幾個章節,我們都是假設在理想的情況中,只有TCP Connection通過bottleneck並且這些TCP Connection的參數都是相同的,但在實際的網路比存在著很多可能影響TCP效能的因素,例如(1) Round-Trip Times (RTT):當同時有許多TCP Connections共用相同的Link時,由於RTT較短的Connection?可以閒置時(等待ACK/Duplicate ACK開啟Congestion window)更快地取得Link上的可用頻寛,因此和RTT時間較長的TCP Connection比較起來,擁有較好的資料傳輸效能。
(2) Timer Granularity:一般而言,通常TCP在實際運作時,並不會真的隨時去注意封包是否過期了(Timeout),而是設定一個時間值,稱為”Coarse-grain timer”,每隔一段時間才去檢查是否有封包已經Timeout了。
因此,當有封包遺失時,這意謂著一個封包從遺失直到Timeout被重送的時間也會大大地增長。
(3) Slow-start threshold:ssthresh的值決定終止Slow-start、開始進入Congestion avoidance時window 的大小。
若設的太大,很容易使得TCP因為送得太快而產生Multiple packet loss 的情形。
若設得太小,會使得TCP因為太早進入Congestion avoidance階段,而使得頻寛的使用率變得很差。
其它的因素包括傳送的封包大小、網路的佇列管理機制,網路是否有對TCP 提供支援(例如ECN),有線/無線的環境等。
因為篇幅的關係,以下我們只列出前面幾項的模擬實驗結果。
實驗步驟[實驗1:Round-Trip Times對傳輸效能的影響]模擬實驗網路架構圖。
Contiki 系统移植
(cfs)、外部设备(dev)、链接库(lib)等,并且包含了时钟、 I/O、ELF 装载器、网络驱动等的抽象。 • 3. cpu • cpu 目录下是 Contiki 目前支持的微处理器,例如 arm、avr、 msp430 等。如果需要支持新的微处理器,可以在这里添加相应的源 代码。 • 4. doc • doc 目录是 Contiki 帮助文档目录,对 Contiki 应用程序开发很有参 考价值。使用前需要先用 Doxygen 进行编译。
上一页
返回
11.2 搭建 Contiki 开发环境
• 11.2.2 Contiki 系统移植过程
• 嵌入式的操作系统在硬件平台上的移植,一直以来让很多新手望而却 步,因为移植一个操作系统比写一个 C 语言程序复杂多了。那么究 竟怎样移植 Contiki 系统到 STM32 上呢?移植过程中需要修改源码 的哪个部分呢?通过下面的分析,读者就知道了。
上一页 下一页 返回
11.2 搭建 Contiki 开发环境
• (2)添加 STM32 官方库文件。 • 将 STM32F10x_StdPeriph_Lib_V3.5.0(ST 公司提供的 STM32 标
准库文件,3.5 版本库放在 Contiki 系统源码的 contiki2.6\cpu\arm\stm32f10x 目录下。 • (3)在工程的 cpu 组目录下添加 Contiki 系统时钟文件 clock.c, 该文件所在目录为:contiki-2.6\cpu\arm\stm32f10x。 • 4. 创建 contiki-main.c 文件 • 移植 Contiki 系统所需要的 Contiki 系统文件、STM32 官方库所需 文件都添加完毕后,若想让程序执行就必须有 main()函数,因为 1~ 3 步添加的都是一些相应的支持文件,下面在工程的 zonesion\proj 组目录下新建一个 contiki-main.c 文件,创建方法如下:
contiki 系统-时钟

contiki 系统提供了一系列的时钟库,可以供 contiki 系统或者用户态的程 序调用.时钟库包括时钟到期检查.在调度时钟时低功耗的模块被唤醒,实时的任 务调度.定时器也可以让执行具体的事情过程中进入休眼状态.
1.contiki 的定时器的种类
contiki 包抱一个时钟模块,但是有多个时钟模型:timer, stimer, ctimer, etimer, rtimer.不同的时钟有不同的作用.有的定时器运行时间长,但是间隔时 间短,有的间隔时间长,但是运行时间短.有些能用于中断的上下文中(rtimer), 但是有些不行.
etimer 库主要提供的是事件时钟(event timer),在一个时钟周期 后,contiki 系统可以使用这个时钟做事件调度.主要用在 contiki 进程当系统的 其它功能工作或休眼时,这个进程在等待一个时钟周期.
ctimer 库主要用于回调时钟(callback timers),主要用一个时钟周期完了 之后,去调度回调函数.当其它进程进入工作或者休眼状态时,这个进程仍然可以 等待 ctimer.由于 ctimer 本来就是当一个时钟周期结束时,去调用一个函数并且 执行.ctim执行时可以 用到 ctimer.ctimer 可以通过 rime 协议栈去管理通讯是否超时的.
3.stimer 模块
实际上 stimer 这个模块跟 timer 的用法,及 API 的功能完全一致,只不过是 以 seconds 为单位计时的.而且在 timer 中也提到了如何实现的。
API 如下 void stimer_set(struct stimer *t, unsigned long interval) void stimer_reset(struct stimer *t) void stimer_restart(struct stimer *t) int stimer_expired(struct stimer *t) unsigned long stimer_remaining(struct stimer *t)
实验二 系统时间响应分析

实验二系统时间响应分析实验课时数:2学时实验性质:验证性实验实验室名称:数字化实验室一、实验项目设计内容及要求1.实验目的使学生进一步理解和掌握系统时间响应分析的相关知识2.实验内容完成一阶、二阶和三阶系统在单位脉冲和单位阶跃输入信号以及正弦信号作用下的响应,求取二阶系统的性能指标,记录试验结果并对此进行分析。
3.实验要求要求学生用MA TLAB软件的相应功能,编程实现一阶、二阶和三阶系统在几种典型输入信号(包括单位脉冲信号、单位阶跃信号)作用下的响应,记录结果并进行分析处理:对一阶和二阶系统,要求用实验结果来分析系统特征参数对系统时间响应的影响;对二阶系统和三阶系统的相同输入信号对应的响应进行比较,得出结论。
4.实验条件利用机械工程学院数字化试验室的计算机,根据MATLAB软件的功能进行简单的编程来进行试验。
二、具体要求及实验过程1各种时间输入信号响应的表达(1)单位脉冲信号响应:[y,x]=impulse[sys,t](2)单位阶跃信号响应:[y,x]=step[sys,t](3)任意输入信号响应:[y,x]=lsim[sys,u,t]其中,y为输出响应,x为状态响应(可选);sys为建立的模型;t为仿真时间区段(可选)试验方案设计可参考教材相关内容,相应的M程序可参考(杨叔子主编的《机械工程控制基础》第五版)提供的程序,在试验指导教师的辅导下掌握M程序的内容和格式要求,并了解M程序在MATLAB软件中的加载和执行过程。
2实验的具体内容(1)完成一阶(选用不同的时间常数T)、二阶系统(选择不同的阻尼比ξ和无阻尼固有频率w,n而且阻尼比ξ要有欠阻、临界阻尼和过阻尼三种情况)在典型输入信号(单位脉冲、单位阶跃、正弦信号)作用下所对应的时间响应实验;(2)完成二阶系统性能指标的求取(设计的二阶系统必须是欠阻尼的二阶系统)。
4.实验分析内容(1)分析时间常数对一阶系统时间响应的影响;(2)分析参数对二阶系统的时间响应的性能指标的影响;(3)分析系统稳定性与系统特征值的关系;(4)了解系统频率响应的特点。
contiki3.0之button_sensor全面解析,已经测试成功

contiki3.0之button_sensor全⾯解析,已经测试成功以InstantContiki3.0环境的cc2538dk为例进⾏解剥原理》》》》⾸先找到3.0\platform\cc2538dk⾥⾯有⼀个contiki-main.c⼀般不⽤更改,就是我们通常的main.c主函数,⼀切将从这⾥开始。
特别注意的是,3.0\cpu\cc2538这⾥⾯所有⽂件不⽤更改,因为都是作者按照芯⽚⼿册和OS制定好的。
在3.0\core\lib的sensors.c, 在3.0\core\dev的button-sensor.c不⽤更改, 是系统的⽂件改什么改。
哈哈,要更改的内容是,3.0\platform\cc2538dk⾥⾯的contiki-main.c必要时更改,我们重点看⼀下这些内容1/*---------------------------------------------------------------------------*/2/**3 * \brief Main routine for the cc2538dk platform4*/5int6 main(void)7 {8 nvic_init();9 ioc_init();10 sys_ctrl_init();11 clock_init();12 lpm_init();13 rtimer_init();14 gpio_init();1516 leds_init();17 fade(LEDS_YELLOW);1819 process_init();2021 watchdog_init();22 button_sensor_init();这个是平台的初始化部份,很重要!你看button_sensor_init()出现了。
在\3.0\platform\cc2538dk\dev⾥⾯有button-sensor.c,这是我们要更改的,和3.0\core\dev的button-sensor.c名字⼀样,这种搞法在IAR⾥⾯,肯定会报⽂件重名错误,看来linux很⾃由也很不严瑾。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.etimer结构(代码在附录中-文档末尾)选中etimer后按F12转到etimer结构体的定义中其中struct timer timer;是一个定时器,按F12转定义后可以看到timer仅包含起始时刻clock_time_t start;和间隔时间clock_time_t interval;,通过比较到到期时间和新的当前时间,从而判断该定时器是不是到期。
struct etimer *next;用于指向下一个etimer。
struct process *p;指向一个进程,当etimer到期时,会给相应的进程传递事件PROCESS_EVENT_TIMER,从而使该进程启动。
2.etimer相关的部分函数(位于core->sys->etimer.c文件中)2.1 void etimer_set(struct etimer *et,clock_time_t interval)(位于第180行)参数1 struct etimer *:需要设置的etimer指针参数2 clock_time_t interval: etimer的时间间隔主要功能:设置etimer中的timer,然后将etimer添加到timerlist链表中。
选中timer_set函数,按F12跳转到timer_set函数中主要功能:设置timer的时间间隔interval和开始时间start。
时间间隔为传入的参数,开始时间为当前时间。
2.2 static void add_timer(struct etimer *timer)(位于第155行)选中add_timer函数,按F12跳转到add_timer函数中首先etimer_request_poll用于提升etimer_process进程的优先级,以便于etimer 能尽快的得到响应。
然后判断etimer所绑定的进程是否被执行过(被执行过之后,etimer绑定的进程会置为PROCESS_NONE),如果没执行过,则遍历timerlist链表,如果需要设置的etimer在timerlist链表中,则直接修改etimer绑定的进程为正在执行的进程(PROCESS_CURRENT 宏返回系统当前正在执行的进程),然后调用update_time函数更新时间,如果etimer不在timerlist链表中,绑定正在执行的进程,将etimer插入在timerlist链表的头部,然后,调用update_time函数更新时间。
2.3 static void update_time(void)(位于第58行)选中update_time函数,按F12转到定义,主要功能:update_time函数的主要功能是求出下一个到期时间next_expiration(全局静态变量),即时间到达next_expiration的时候,就有etimer到期。
(next_expiration是一个时间点)。
遍历timerlist,找出最近到期的timer,并求得下一个到期时间next_expiration。
2.4 PROCESS_THREAD(etimer_process, ev, data)(位于第82行)前半段代码主要功能:如果触发进程的事件是PROCESS_EVENT_EXITED,说明有进程退出了,则遍历timerlist,并把与该退出进程相关的etimer从timerlist删除。
(进程退出时,需向所有进程发送事件PROCESS_EVENT_EXITED)。
后半段代码主要功能:利用timer_expired函数检查是否有etimer的timer到期,如果有,则使用process_post启动etimer对应的进程,传递的事件为PROCESS_EVENT_TIMER,数据为此etimer。
启动成功(process_post返回值为PROCESS_ERR_OK表示启动成功)则将etimer的p指向PROCESS_NONE,表示该etimer 已到期。
然后更新timerlist链表,update_time求出下一个到期时间next_expiration。
如果启动进程失败(可能是事件队列已满),则提升etimer的优先级。
2.5 void etimer_request_poll(void)(位于第148行)主要功能:提升etimer的优先级,即将etimer_process进程的needspoll置为1。
2.6 void etimer_reset(struct etimer *et)主要功能:重新设置t->start,在t->start的基础上增加原有的时间间隔t->interval。
2.7 void etimer_restart(struct etimer *et)主要功能:重新设置t->start,设置为现在(clock_time()函数的返回值)。
2.8 timer_reset函数和timer_restart函数的区别源代码中的解释:timer_reset:Reset the timer with the same interval.timer_restart:Restart the timer from the current point in time个人理解,timer_reset是将timer的开始时间在原来的基础上增加原来的时间间隔,timer_restart是将开始时间设置为当前时间。
比如,设置一个etimer为2s之后触发,当2s到达的时候之后的1s后etimer_reset重新设置etimer,那么下一次etimer将在第4s的时候触发,如果timer_restart重新设置etimer,那么下一次etimer将在第5s的时候触发。
3.ctimer结构(代码在附录中-文档末尾)如图,ctimer的结构和etimer类似,也是利用的链表结构。
struct ctimer *next; 用于指向链表中的下一个ctimer。
struct etimer etimer; ctimer内部也是使用的一个etimer。
struct process *p; ctimer会绑定一个进程(使用的时候绑定的是当前正在执行的进程)。
void (*f)(void *); ctimer对应的回调函数。
void *ptr; 回调函数对应的参数。
4.ctimer相关的部分函数(位于core->sys->ctimer.c文件中)4.1 void ctimer_set(struct ctimer *c, clock_time_t t, void (*f)(void *), void *ptr)(位于第98行)最后一个参数:传递的是当前正在执行的进程(PROCESS_CURRENT宏)4.2 void ctimer_set_with_process(struct ctimer *c, clock_time_t t, void (*f)(void *), void *ptr, struct process *p)(位于第105行)主要功能:因为ctimer内部实际上是使用了etimer来完成的,这个函数的主要功能就是设置对应的etimer,然后将ctimer添加到ctimer_list链表中。
有关代码中用到的两个宏:PROCESS_CONTEXT_BEGIN(&ctimer_process)和PROCESS_CONTEXT_END(&ctimer_process),个人觉得功能类似于中断的保护现场和恢复现场。
4.3PROCESS_THREAD(ctimer_process, ev, data)(位于第63行)主要功能:当ctimer对应的etimer定时到达的时候,执行ctimer对应的回调函数f。
首先遍历ctimer_list链表,将ctimer_list链表中ctimer对应的etimer启动(调用etimer_set函数)。
然后使用PROCESS_YIELD_UNTIL等待etimer触发,触发之后,遍历ctimer_list链表,找到被触发的ctimer并从ctimer_list链表中删除。
然后运行ctimer对应的回调函数。
4.4void ctimer_init(void)(位于第90行)主要功能:调用list_init函数初始化ctimer_list链表,然后调用process_start 函数将ctimer_process添加到进程链表process_list中。
5.rtimer结构(代码在附录中-文档末尾)rtimer包含三个部分,rtimer_clock_t,表示的是rtimer定时的时间,在经过time时间之后,rtimer对应的回调函数会被触发。
rtimer_callback_t,表示的是rtimer绑定的回调函数。
void *ptr,表示的是在执行回调函数的时候,传递的参数。
6.rtimer相关的部分函数(位于core->sys->rtimer.c文件中)6.1void rtimer_init(void)(位于第60行)主要功能:调用rtimer_arch_init()函数初始化CC2530的定时器1的通道1。
6.2int rtimer_set(struct rtimer *rtimer, rtimer_clock_t time, rtimer_clock_tduration, rtimer_callback_t func, void *ptr)(位于第60行)参数rtimer:需要设置的rtimer。
参数time:rtimer定时的时间长度,一般传递值用RTIMER_ARCH_SECOND宏(rtimer定时1s的time数)计算。
参数duration:参数未使用,无意义。
参数func:回调函数。
参数ptr:回调函数的参数。
主要功能:设置rtimer的定时时间和回调函数,如果rtimer_set函数是第一次被调用,还要调用rtimer_arch_schedule函数来开启定时器1的中断。
6.3void rtimer_arch_schedule (rtimer_clock_t t)(位于rtimer_arch.c第85行)主要功能:配置和开启CC2530的定时器1中断。
6.4void rtimer_isr (void)(位于rtimer_arch.c第105行)定时器1的中断函数。
主要功能:当rtimer的定时时间到来的时候,调用rtimer_run_next函数。
6.5void rtimer_run_next(void)(位于第60行)主要功能:调用rtimer对应的回调函数,如果还有rtimer,重新初始化rtimer。