微型无人直升机旋翼操纵机构设计及分析(免费下载)
小型无人直升机的飞行控制系统

小型无人直升机 的飞行控制系统飞行控制设计简介
小型 无人 直升机 在 很 多行业 中都 有应 用 ,例如 地质 探 查、地 理测 绘 、衣 业种 植 等 等,无人 机 的 研 发 和 使 用 给 很 多 行 业 工 作 的 开展 带来 了非常 多的便 利 。我 国
平 移 的情 况 ;此 外 ,根 据 旋 翼 和 旋 翼 不 平 衡 产 生 的反转扭矩反应, 也可导致飞机横摆到左边。 此 外,直升机 的左右旋翼之间也会 由于这样的 力量差导致飞机偏离制定航 向,直升机飞行姿 态和飞行位置之 间同样存在强耦合。 由于直升 机 旋翼 具有 良好 的耦合特性 ,旋翼在全飞行包 小型无 人直 升机 的 飞行控 制系统 是直 升 线控制系 统设计时 ,必须充分考虑各种可能的 机 最重 要 的 部 位 , 也 是 核 心 部 位 , 如 果无 法 实 飞行 状 态 , 以保 证 控 制 系 统 具 有 良好 的 解 耦 性 现 良好 的飞行 ,直升机的其它功能也将难 以展 和鲁棒性 。 现。在实际设计的过程中 ,很多技术人员都遇 1 . 4受外界影响 大 到了飞行控制难题 ,这使得无人机设计进入了 长 时 间 的 瓶 颈 期 , 设 计 速 度 也 随 之 降低 。 小型 无人 直升 机在 空 中,外部环 境,例 1小型无人直升机飞行控制特性 分析 如会通过空气、风的影响,会对 飞机 的飞行产 生不利影响,尤其是超 小型小型无人直升机体 积 小 , 重 量 轻 , 速 度 低 , 更 容 易 受 到 外 部扰 动 1 . 1建模 困难 的影响。 通过设计具有很强的鲁棒性控 制系统、 小 型无人 直升 机在 飞行 过程 中,容 易受 自适 应 能 力 强 的 飞 行 控 制 并 不 能完 全 解 除外 界 【 关键 词 】 小型 无 人 直 升 机 飞行 系统 设 计 飞 行 控 制特 性
基于单片机的微小型无人直升机姿态控制系统的设计

基于单片机的微小型无人直升机姿态控制系统的设计[摘要]本文主要介绍了一款微小型无人直升机的整体控制系统,完成了基于单片机技术的姿态控制系统的硬件设计,并且完成了检测信号的模拟输出和舵机控制的试验。
[关键词]微小型无人直升机单片机姿态控制系统一、控制系统总体方案整个微小型无人直升机控制系统可分为机载部分和地面部分,机载部分负责维持飞机的稳定飞行并提供图像信息给地面,地面部分根据飞机的姿态及得到的图像信息做出下一步飞行的指令并发给机载部分。
考虑到使用环境的复杂情况,由人使用遥控器现场操作可以较好控制飞行,并可对飞行中出现的各种情况及时处理,确保飞行的安全。
地面部分与机载部分之间有两条数据链路:一条负责传送图像,一条负责传送飞行状态和指令。
图像传送的数据链路通过无线摄像头解决。
地面部分可以分为地面工作站和图像处理平台,前者与机载飞行控制器通讯以发送控制命令并获得飞机的飞行状态信息,后者获取机载摄像头的图像并对图像进行处理用以辅助判断,帮助操作者进行遥控操作。
机载部分系统包括:飞行姿态测量控制系统模块、图像设备模块、数据链路以及执行舵机群等。
地面部分包括控制器、工作站、和图像处理平台。
二、姿态控制系统微小型无人直升机姿态控制系统的主要功能是稳定直升机的飞行姿态,或者说是稳定直升机的角运动。
主要实现方式是在微小型直升机的控制回路上加上一个用于姿态测量的反馈回路,通过传感器得到微小型直升机的姿态信号,然后与要求控制的姿态信号进行比较,通过设计的反馈控制规律使输出的控制信号控制微小型直升机稳定在预期的姿态角度上。
微小型直升机姿态测量控制系统包括倾角传感器、控制电路、多个舵机、接收机及遥控接收器等硬件部分。
其中控制电路的功能是接收接收机的操控信号和倾角传感器的输出信号,可以直接输出接收机的信号或者切换到输出遥控信号与传感器反馈信号叠加处理的结果,然后舵机接收控制电路的PWM信号控制直升机的旋翼。
倾角传感器实时接收直升机的姿态信号,输出到控制电路。
小型无人直升机建模与分析
第42卷第10期 2008年10月上海交通大学学报JOU RN AL O F SH AN G HA I JIA OT O N G U N IV ERSIT YVol.42No.10 Oct.2008收稿日期:2007 12 19基金项目:国家自然科学基金资助项目(60475039)作者简介:杜建福(1976 ),男,山东临沂人,博士,研究方向为机器人建模与控制,计算机仿真.吕恬生(联系人),男,教授,博士生导师,电话(T el.):021 ********;E mail:tslu@s .文章编号:1006 2467(2008)10 1726 05小型无人直升机建模与分析杜建福1, 吕恬生1, K onstantin Kondak 2, 张亚欧1(1.上海交通大学机械与动力工程学院,上海200240; 2.Faculty o f Electrical Engineering andComputer Science,T echnische Univ er sit t Berlin,Ber lin 10587,Germany)摘 要:由于小型无人直升机具有不同于大型直升机的独特特点,提出采用结构分析法推导小型无人直升机的数学模型.将小型直升机看作2个刚体(机体和主旋翼),借助Kane 方法推导了小型直升机的动力学模型,并与单刚体建模进行了比较.分析表明,2种建模方法的运动学方程和平移动力学方程相同,但旋转动力学模型完全不同.采用2种刚体所建模型的响应具有余弦规律而单刚体所建模型则呈线性规律.飞行试验验证了模型的有效性.关键词:无人直升机;动力学建模;Kane 方法中图分类号:TP 242;V 278 文献标识码:AModeling of a Small Scale U nm anned HelicopterD U J ian f u 1, L Tian sheng 1, K onstantin K ondak 2, ZH AN G Ya ou1(1.School of M echanical Engineering,Shanghai Jiaotong University,Shanghai 200240,China;2.Faculty of Electrical Eng ineer ing and Com puter Science,T echnische Universit t Berlin,Ber lin 10587,Germany)Abstract:Based on the analysis of the difference betw een small scale unmanned helicopters and nor mal scale helico pters,the small scale helicopter was mo deled as tw o rigid bo dies:fuselage and m ain tail rotor.The dynam ical m odel w as deduced by Kane method,and another m odel co nsidering the helicopter as onerigid bo dy w as also deduced fo r com parison.It sho ws that the kinem atics and translational dy namics are the sam e,but they have different r otational dy namics.The response of the dynamics m odeled as tw o rig id bo dy is co sine w hile the r espo nse of the dynam ics m odeled as one rigid body is linear.T he real flight ex periments ver ify the v alidity o f the m odel.Key words:unmanned helicopter;dynamics m odeling;Kane m ethod直升机可以定点悬停、垂直起降,具有其他飞行器所不具有的突出优点,可广泛用于地形勘测、灾情监视、环境检测、森林防火、高压线巡检、大桥、水坝检查等场合.研究开发无人驾驶直升机自主飞行控制系统具有非常重要的现实意义.然而,由于它是一个典型的强耦合、多变量、有滞后的非线性系统,实现精确建模与自主控制颇具挑战性[1,2].文献[3 7]中对直升机动力学建模进行了详细阐述.动力学建模多以刚体动力学为基础,并辅以辨识方法.常规建模方法是将直升机作为一个刚体建模,没有考虑主旋翼的惯性效应.文献[4,5]中仔细分析了小型无人直升机主旋翼惯性效应在建模中的作用,发现旋翼惯性效应,需简化为刚体而不能简化为质点;但在推导模型时,欧拉角为绕体坐标轴1 2 3的旋转角而非Yaw Pitch Ro ll(YPR).采用YPR 建模,各个通道可以独立控制且便于系统的线性化[8].本文以双刚体建模方法[4,5]为基础,采用YPR 为欧拉角重新建模,并通过试验对模型进行了验证.1 系统建模小型直升机和大型直升机相比,除了在结构尺寸上有明显差别外,还具有以下特点: 更高的主旋翼转速; 没有挥舞铰且主旋翼具有更强的刚性.这些特点使得主旋翼的惯性效应在小型无人驾驶直升机的旋转运动中起主要作用.本文不仅将机体视作刚体,而且把主旋翼也看作刚体,采用双刚体建模.图1所示为小型无人直升机简化模型示意图.图中:O N n 1 n 2 n 3为惯性坐标系;O f 1 f 2 f 3为机体坐标系;O F为机体质心;OMR为主旋翼质心;O TR为尾翼质心;主旋翼产生的升力为F MR 3,产生的力矩为TMR 1、TM R2和阻力距TMR 3,尾翼产生的拉力为F TR 2,阻力矩为T TR 2;F 表示机体,M R 表示主旋翼,TR 表示尾翼.图1 小型无人直升机简化模型Fig.1 Simplified model of small scale unmanned helico pt er无人机的平移运动方程和旋转运动方程可以根据运动学基本原理得到,在此不再赘述.下面直接给出计算结果:平移运动方程x =u, y =v , z =w(1) 旋转运动方程!=p +tan (q sin +r cos )(2) !=q cos -r sin (3)=(q sin +r cos )/cos (4)式中:x 、y 、z 为直升机在惯性坐标系下的三维空间位置; 、 、 分别为俯仰、横滚和航向角;u 、v 、w 为直升机在惯性系下的平移速率;p 、q 、r 分别为直升机绕体坐标轴f 1、f 2、f 3的旋转速率.对于动力学方程,需要将直升机考虑为2个刚体.在此选择计算量小、求解简单的Kane 方法建模.在动力学建模前,首先需对系统做如下简化和假设.(1)f 3轴和主旋翼旋转轴重合,并假定机体质心在f 3轴上(可用配平得到);(2)r 为常数(可用独立的航向控制环实现);(3)主旋翼转速!M R 为常数;(4)主旋翼转动惯量I MR 11=I MR22;(5)忽略平尾升力、平尾阻力、垂尾侧向力、垂尾阻力和机身空气动力;(6)忽略尾翼惯性效应.利用Kane 方法建模需要定义广义坐标和广义速率.本文将直升机的空间位置x 、y 、z 以及俯仰、横滚、航向角 、 、 定义为广义坐标,平移速率u 、v 、w 和旋转角速率p 、q 、r 定义为广义速率.为了建立Kane 方程,首先需求出机体坐标系原点O 、O TR 、飞机质心CM 、O F 、O MR 的速度以及机体和主旋翼的角速度,然后求出相应的偏速度和偏角速度.O F 对各个广义速率的偏速度为: v OF1= v O Fu =n 1v O F2= v O Fv =n 2v O F 3= v O F w=n 3vO F 4= v O F p =-(L F -L MR )m MR mf 2v O F5= v O Fq =(L F -L M R )m MRm f1vO F6= v O Fr=0 O TR对各个广义速率的偏速度为: vO T R1= v OT Ru=n 1v O T R2= v O T Rv =n 2vOT R3= v O T Rw=n 3v O TR 4= v O TRp =L F m F +L M R m MR mf2vO T R5= v O T R q =-L F m F +L MR m M R mf 1+L T f 31727第10期杜建福,等:小型无人直升机建模与分析vO TR 6=v O TRr=-L Tf 2O MR对各个广义速率的偏速度为:v O MR 1= v OMRu =n 1v O MR2= vO MRv=n 2vO MR 3= v O MRw =n 3 v O MR4= v O MR p =-(L MR -L F )m F mf2vO MR5= v O MRq =(L MR -L F )m Fmf1v O MR6= v OTRr=0机体F 和主旋翼M R 对各个广义角速度的偏角速度(F 和M R 具有相同的偏角速度)为: !F 1(!MR 1)= !Fu=0,!F 2(!MR 2)= !Fv=0!F 3(!MR 3)= !F w =0, !F 4(!MR 4)= !Fp=f 1 !F 5(!MR 5)= !F q =f 2, !F 6(!MR 6)= !F r=f 3其中,n 1、n 2、n 3、f 1、f 2、f 3为单位向量;mM R为主旋翼质量,m F为机体质量,m =m F+m MR,为直升机总质量;L MR 为主旋翼质心O MR 到体坐标系原点O 的距离;L F 为机体质心O F 到O 的距离;L T 为尾翼中心到O 的距离.施加于直升机的主动力有尾翼拉力F T R2、阻力距TTR 2、主旋翼升力FMR 3、力矩T MR 1、TMR2和阻力距T MR 3.广义主动力F i (i =1,2,∀,6)根据下式计算:F i =F TR 2f 2!vO T R i+FM R 3f 3!vO M Ri+m Fg n 3!v O F i+m M R g n 3!v O MR i+(T MR 1f 1+T MR2f 2+T MR3f 3)!!M Ri +T TR2f 2!!Fi相应的广义主动力为: F 1=F MR 3(sin sin ∀+sin cos cos ∀)-F TR 2(sin ∀cos -sin sin cos ∀)F 2=F TR 2(cos cos ∀+sin sin sin ∀)-FMR3(sin cos ∀-sin sin ∀cos )F 3=F TR 2sin cos +F MR 3cos cos -mgF 4=T M R1+LMRmM R+L F m FmF TR2F 5=T M R 2+T T R 2, F 6=T MR3-L T F TR 2计算广义惯性力F *i (i =1,2,∀,6)需要求解机体和主旋翼的惯性力和惯性力矩,对应于u i 的广义惯性力可由下式求解:F *i =m FaFO F!v O Fi+[I F a F +!F #(I F !F )]!!F i +m MRa MRO MR !v O MRi +[I MRaMR+!M R#(IMR!M R)]!M Ri相应的广义惯性力为:F *1=-m u , F *2=-m v , F *3=-m w F*4=-I MR 11+IF 11+m F m MRm (L F -L MR )2p !+IF22-I F 33-IMR 11+m F mM Rm(L F -L MR )2#qr -2I MR11!M RqF*5=-I F 22+IMR 11-(LMR-L F)2m FmMRmq !+2I MR 11!MRp +I F 33+I MR11-I F11+(L F-LMR)2#m F mMRmp rF *6=(I F11-I F22)pq -(2I MR11+I F33)r!其中,I F11、I F22、I F33分别为机体相应于各轴的转动惯量.由Kane 方程F i +F *i =0(i =1,2,∀,6)可得下面的平移和旋转动力学方程:平移动力学方程m u =F MR 3(sin sin ∀+sin cos cos ∀)- F TR2(sin ∀cos -sin sin cos ∀)m v =F TR 2(cos cos ∀+sin sin sin ∀)- F MR 3(sin cos ∀-sin sin ∀cos )m w =F TR 2sin cos +F MR 3cos cos -mg (5)旋转动力学方程q !=a 21p +b u 22T MR 2+b v 22T TR2+b p r pr(6) p !=a 12q +b u 11T MR 1+b v 11F TR 2+b q r qr (7) r !=b u 31F TR 2+b v 33T MR 3+b pq p q(8)式中:a 12=-2mI MR 11!MRm(I F 11+I MR 11)+(L F -L MR )2m F mMR b u11=(L F m F +L MR m MR)m m(I F 11+I MR 11)+(L F -L MR )2m F mMRb v11=L MR m MRm(I F 11+I MR 11)+(L F -L MR )2m F mMRb q r =-m(I MR 11-I F 22+I F 33)-(L F -L MR )2m F mMRm(I F 11+I MR 11)+(L F -L MR )2m F m MR a 21=-2mI MR 11!MRm(I F 22+I MR 11)+(L F -L MR )2m F mMRb u 22=-mm(I F22+I MR 11)+(L F -L MR )2m F m MRb v 22=-m m(I F 22+I MR11)+(L F -L MR )2m F m MR b p r =-m(I F 33+I MR 11-I F 11)+(L F -L MR )2m F m MRm(I F 22+I MR 11)+(L F -L MR )2m F mMR b u31=-L TI F 33+2I MR 11, b v 33=1I F 33+2I MR111728上 海 交 通 大 学 学 报第42卷b p q=I F11-I F22 I F33+2I MR112 模型分析方程(1)~(8)描述了系统的运动学方程和动力学方程.可以看出,方程是常系数线性方程.根据假设r、!MR为常数,I F11=I F22.方程(6)~(8)也是常系数线性方程,但存在严重的耦合.方程(2)~(5)都是超越方程,给直升机控制器设计带来较大挑战.因此,在控制器设计中不仅要考虑旋转动力学的解耦,还需要考虑平移动力学和旋转运动学的非线性问题.当无人驾驶直升机做悬停或低速运动时,由于俯仰角、横滚角较小,即cos ∃1,cos ∃1,sin ∃ , sin ∃ ,忽略二阶小量,可以将旋转运动学方程(2)、(3)简化为!=p, !=q(9) 由式(9)可以看出,该模型已经是线性模型.需要提及的是,在文献[4,5]中,旋转运动学方程无法线性化,其旋转运动学方程如下:q!4=(u4cos q6-u5sin q6)/cos q5q!5=u4sin q6+u5cos q6q!6=u6+tan q5(u4cos q6-u5sin q6)(10)式中:q4、q5、q6为欧拉角(Euler1 2 3);u4、u5、u6分别为绕体坐标轴f1、f2、f3的角速率.由于q!4、q!5与q!6密切相关,从而使该式无法进行线性化,不便于控制器的设计.对于式(5),由于非线性严重,控制器设计中需特别考虑.另外,为了便于比较常规单刚体建模和本文双刚体建模的异同.在此给出采用单刚体建模的结果(单刚体建模时将直升机看成一个刚体,不考虑主旋翼惯性效应).运动学方程及平移动力学方程和前面结果相同,而旋转动力学方程则变为:p=1I11(T MR1-L F F TR2)-I33-I22I11q r(11)q=1I22(T MR2+T TR2)-I11-I33I22p r(12)r=1I33T MR3-I22-I11I33pq-LTI33F TR2(13)式中,I11、I22、I33为直升机各相应轴的转动惯量.比较式(6)~(8)和(11)~(13)可以看出,采用2种建模方法所得结果差异较大.为了便于进一步分析,可以认为F TR2和T TR2是干扰,r=0,则式(6)、(7)以及式(11)、(12)可分别变为p=a12q+b u11T MR1, q=a21p+b u22T MR2(14)p=T MR1I11, q=TMR2I22(15) 由式(15)可以看出,T MR1决定了 p,T MR2决定了 q.由式(14)中可见,T MR1不仅影响 p,还影响到q; T MR2不仅影响 q,还影响p,耦合现象非常严重.当T MR1、T MR2是常量时,式(14)、(15)很容易求解.对于式(14):p=b u22a12T MR2+C1cos(a12t)+C2sin(a12t)q=-b u11a12T MR1+C2cos(a12t)-C1sin(a12t)(16)对于式(15):p=1I11T MR1t+C1q=1I22T MR2t+C2(17)从以上结果可以看出,2种情况下p、q的变化规律完全不同.由式(16)可以看出,p、q的变化符合余弦规律;而式(17)则揭示p、q的变化呈线性规律.分析式(14)~(17)可以看出,纵横向通道的相互耦合是p、q成余弦变化规律的直接原因.3 模型验证本文模型已经通过实飞实验验证了其有效性.实验中采用了MPC控制算法.但由于篇幅所限,这里仅给出采用MPC算法的控制结果.图2所示为室内的实飞场景.直升机被固定在1个保护架上(由炭纤维杆制成,质量1.2kg).保护架上有4个高亮度的指示灯,用于直升机的位置检测(通过三维视觉系统).图3所示为直升机实飞和仿真实验x、y、z3个坐标的曲线.实验中,直升机先悬停在(0,-1.5,0.9)位置,然后x轴有一个阶跃变化,从0到1m,其他2个轴位置保持不变.由图可见,x、y轴的控制误差分别为%0.15m,z轴为%0.05m.因此,该控制系统的最大控制误差在%0.15m以内,可以满足绝大多数应用场合的控制要求.图2 实飞场景Fig.2 Real fli g ht scene1729第10期杜建福,等:小型无人直升机建模与分析图3 直升机飞行位置坐标Fig.3 T he coordinate of helicopter flig ht4 结 语本文考虑直升机主旋翼惯性效应,采用Kane 方法推导了系统的数学模型,并分析了直升机系统非线性的原因.其中平移动力学方程和旋转运动学方程的非线性是导致直升机非线性的重要原因.另外,文中还分析了双刚体模型和单刚体模型的异同.分析结果表明,2种建模方法得到的运动学方程和平移动力学方程相同,但旋转动力学方程不同.采用2种刚体建立的模型响应具有余弦规律;而采用单刚体所建模型则呈线性规律.最后给出实验验证了模型的有效性.参考文献:[1] 周建军,陈 超,崔麦会.无人直升机的发展及其军事应用[J].航空科学技术,2003(1):38 40.ZHOU Jian jun,CHEN Chao,CU I M ai hui.Development and militar y application of unmanned helico pters [J].A ero nautica l Science and T echnolog y ,2003(1):38 40.[2] 张亚欧,吕恬生,杜建福.无人直升机纵、横向姿态建模与稳定控制[J].上海交通大学学报,2007,41(1):100 103.ZHANG Ya ou,L T ian sheng,DU Jian fu.T he pitch and roll attitude modeling and stable contro l of unmanned helico pter [J].Jo urnal o f Sha ng ha i J iaotong University ,2007,41(1):100 103.[3] Sung K K .M odeling,identification,and trajectory planningfor a model scale helicopter [D].Ann Arbor:U niversity of Michigan,2001.[4] Kondak K ,Bernard M ,Losse N,et al .Elaborated modelingand control for autonomous small size helicopters [J].V DI Berichte ,2006(1956):207 219.[5] Kondak K,Deeg C,Hommel G,et al .Mechani cal modeland contro l of an autonomous small size helicopter with a stiff main rotor [C]//2004IEEE/RSJ International C o nfer ence on Intelligent R obots and Sy stem s .New York,U nited States:Institute of Electrical and Electronics Engineers Inc,2004:2469 2474.[6] An S,Park B,Suk J.Intelligent attitude control of an unmanned helicopter [EB/OL ].(2005 06)[2007 10]./submission/paper/upload/2full -paper.pdf.2005.[7] 高 正,陈仁良.直升机飞行动力学[M].北京:科学出版社,2003.[8] Tait Bryan angles [EB/OL ].(2007 05)[2007 10].http:///wiki /Tait Bryan -angles.2007.下期发表论文摘要预报网络外部性下我国企业技术引进策略刘 展, 陈宏民(上海交通大学安泰经济与管理学院,200052)摘 要:利用Hotelling 模型所构建的多维产品差异化模型,深入研究了在具有产品网络外部性特征的行业中,我国政府和企业的优化技术引进策略,指出当国际可选择技术与我国自主研发技术质量差距较大时,技术引进国政府应鼓励本国企业引进尽可能高质量的技术;当国际可选择技术与我国自主研发技术质量差距较小时,我国政府应限制本国的技术引进活动;在推动本国企业技术引进活动时,技术引进国应权衡比较引进技术与原有技术的质量差距、技术之间兼容性、技术许可收费比例、技术引进的技术溢出强度等因素,并强调技术企业拥有新技术的知识产权.在此基础上,提出相应的政策建议.1730上 海 交 通 大 学 学 报第42卷。
微小型四旋翼无人直升机建模及控制方法研究_1_5(3)

Lyapunov 函数。
定义 3-2 (Lyapunov 函数[25])设 V ( x) 是一个正的标量函数,如果 V ( x) 具有性质:
( x) = dV ( x) 是连续的(反映能量变化趋势) V ; dx V ( x) 是正定的(反映能量大小) 。
那么, V ( x) 就成为系统的 Lyapunov 函数。 根 据 以 上 相 关 定 义 , 可 以 引 出 用 来 证 明 系 统 Lyapunov 稳 定 性 的 重 要 定 理 , 即
国防科学技术大学研究生院学位论文
⎡ R11 Ftotxb + R12 Ftotyb + R13 Ftotzb ⎤ ⎤ x ⎡ 1⎢ ⎥ ⎢ ⎥ = ⎢ R21 Ftotxb + R22 Ftotyb + R23 Ftotzb ⎥ y ⎢ ⎥ m ⎢ R31 Ftotx + R32 Ftoty + R33 Ftotz ⎥ ⎢ ⎥ z ⎣ ⎦ b b b ⎦ ⎣ ]T 为地面坐标系中的加速度。 x y z 坐标系三个坐标轴方向的分量, [ ⎤ ⎡( p cosθ + q sin φ sin θ + r cos φ sin θ ) / cosθ ⎤ ⎡φ ⎢ ⎥ ⎢ ⎥ q cos φ + r sin φ ⎢θ ⎥ = ⎢ ⎥ ⎢ψ ⎥ ⎢ ⎥ + ( q sin φ r cos φ ) / cos θ ⎦ ⎣ ⎦ ⎣ ⎤ ⎡ [ M totxb + ( I y − I z )qr ] / I x ⎤ ⎡p ⎢ ⎥ ⎢q ⎥ ⎢ ⎥ = ⎢ [ M totyb + ( I z − I x )rp ] / I y ⎥ ⎥ ⎢ ⎥ ⎣r ⎦ ⎢ ⎣[ M totzb + ( I x − I y ) pq] / I z ⎦
小型攻击型四旋翼无人机系统设计分析

小型攻击型四旋翼无人机系统设计分析一、引言无人机技术的飞速发展,使得四旋翼无人机成为了军事领域的重要装备之一、小型攻击型四旋翼无人机以其低成本、高机动性和灵活性得到了广泛的关注和应用。
本文将对小型攻击型四旋翼无人机的系统设计进行分析。
二、系统组成1.机身结构:小型攻击型四旋翼无人机的机身结构应该具备轻巧、坚固和耐用的特点,能够承受高强度的运动和突发力的冲击。
同时,机身应具备良好的气动性能,以提高飞行效率和稳定性。
2.动力系统:动力系统是小型攻击型四旋翼无人机的核心组成部分,通常采用电动驱动的无刷直流电机作为动力源。
电机通过旋转螺旋桨产生升力,控制螺旋桨的转速和旋转方向可以实现飞行、悬停和转弯等动作。
3.控制系统:控制系统是小型攻击型四旋翼无人机的“大脑”,负责控制飞行、导航和任务执行等功能。
通常包括姿态控制、位置控制、导航控制和飞行控制等模块。
姿态控制使用陀螺仪、加速度计和磁力计等传感器来感知机身的姿态变化,然后通过电调控制电机的转速来实现平衡。
位置控制使用GPS、激光雷达和视觉传感器等感知器件来获取位置信息,然后通过PID控制算法控制飞行方向和速度。
4.任务载荷系统:小型攻击型四旋翼无人机通常搭载各种任务载荷,如摄像机、传感器、弹药等。
摄像机可以在任务中提供实时监视和情报收集功能,传感器可以用于目标侦测和测距等功能,弹药可以进行攻击和破坏敌方目标。
5.通信系统:通信系统是小型攻击型四旋翼无人机与地面站或其他系统进行通信的关键环节。
通常使用无线电通信技术,如Wi-Fi、蓝牙和卫星通信等来实现数据传输和控制指令的交互。
同时,通信系统还应该具备一定的抗干扰和保密性能,以防止被敌方干扰和攻击。
三、系统设计优化1.重量优化:小型攻击型四旋翼无人机需要具备较高的机动性和机载载荷能力,但受限于自身重量的限制。
因此,在设计中应该尽量减少机身结构和各组件的重量,采用轻量化的材料和结构设计来提高整体性能。
2.能量效率优化:小型攻击型四旋翼无人机的电池容量有限,为了延长续航时间,应该通过优化动力系统和降低飞行的功耗来提高能量效率。
微型四旋翼无人机控制系统设计与实现

微型四旋翼无人机控制系统设计与实现微型四旋翼无人机控制系统设计与实现一、引言随着无人机技术的快速发展,微型四旋翼无人机因其体积小、机动性强、操作简单等特点而备受关注。
本文将介绍微型四旋翼无人机的控制系统设计与实现,包括硬件结构设计、飞行控制算法、遥控器与无人机的通信以及飞行状态监测等方面的内容。
二、硬件设计微型四旋翼无人机的硬件结构由四个电机和相应的螺旋桨组成,同时还包括飞控、电池、传感器和通信模块等。
电机通过螺旋桨产生推力,控制无人机的飞行方向和姿态。
飞控是无人机的大脑,通过接受传感器数据并进行计算,控制电机输出相应的信号以实现飞行任务。
虽然整个系统设计较为复杂,但由于无人机体积小,所以硬件结构相对较简单。
三、飞行控制算法微型四旋翼无人机的飞行控制算法通常包括姿态控制和高度控制两部分。
姿态控制通过测量无人机的姿态角度,并计算出所需的姿态角度偏差,然后通过PID控制器调整电机的转速,从而实现姿态的稳定控制。
在姿态控制的基础上,高度控制通过测量无人机的高度,并计算出所需的高度偏差,然后通过PID控制器控制推力大小来调整飞行高度。
四、遥控器与无人机的通信遥控器是无人机和操作员之间的重要媒介,通过遥控器操作,操作员可以实现对无人机的遥控飞行。
遥控器通过无线通信方式与无人机进行数据的传输,包括指令的发送和无人机状态的接收。
在通信方面,常用的方式有无线电通信和蓝牙通信,通过指令的传输和接收,操作员可以实时了解无人机的状态,从而对无人机进行精确的操作和控制。
五、飞行状态监测飞行状态监测是无人机飞行过程中的重要环节,通过监测无人机的各项指标来实时反馈无人机的飞行状态。
常见的监测指标包括无人机的姿态角度、高度、速度、电池电量等,这些指标可以通过传感器的测量得到。
操作员通过监测无人机的飞行状态,可以及时调整飞行控制算法参数,以确保无人机的顺利飞行。
六、结论通过本文的介绍,我们对微型四旋翼无人机的控制系统设计与实现有了初步的了解。
小型无人直升机的飞行控制系统
小型无人直升机的飞翔控制系统纲要小型无人直升机在好多行业中都有应用,比如地质探查、地理测绘、农业栽种等等,无人机的研发和使用给好多行业工作的睁开带来了特别多的便利。
我国运用小型无人直升机的历史还不是特别长远,所以有关的技术也不是特别的完美,直升机在飞翔过程中,简单出现控制困难、坠毁等问题。
本文研究的蛀牙方向就是对于小型无人直升机的飞翔控制系统设计,以全面提高无人直升机的飞翔系统,降低其飞翔难度,使之变得更为的易于控制。
【重点词】小型无人直升机飞翔系统设计飞翔控制特征小型无人直升机的飞翔控制系统是直升机最重要的部位,也是中心部位,假如没法实现优秀的飞翔,直升机的其余功能也将难以显现。
在实质设计的过程中,好多技术人员都碰到了飞翔控制难题,这使得无人机设计进入了长时间的瓶颈期,设计速度也随之降低。
1小型无人直升机飞翔控制特征剖析1.1 建模困难小型无人直升机在飞翔过程中,简单遇到外界气流扰乱。
别的,因为超小型无人直升机选择体积小,重量轻,易变形的资料,所以难以成立精准的动力学模型。
别的,对于微旋翼气动问题,成立旋翼数学模型时需要解决低雷诺兹数问题,雷诺兹数对微旋翼提高特征的影响很大。
要成立较为复杂的旋翼数学模型,要求旋翼控制系统一定设计拥有较强的鲁棒性和弱有关性模型。
1.2 欠 ?动无人直升机的六个空间运动度使得腾飞翔控制系统存在严重的缺点,也就是欠驱动性。
旋翼转速的控制输入量存在不足,所以,小型无人直升机是一个典型的欠驱动系统。
飞翔控制系统欠驱动主假如因为其非线性特色,所以不可以够全面的反应其线性化特色,所以其飞翔控制系统设计较为复杂,且控制存在必定的困难。
对于欠驱动系统的研究一般是针对构造相对单调的系统,或许是挪动机器人,合适用在欠驱动旋翼的控制系统还比较短缺。
1.3 强耦合小型无人直升机需要使用多个输入控制输出六个自由度,所以它拥有高度的耦合特征,控制输入的随意一个旋翼的转速变化都会影响到起码三个自由度。
02-小型无人倾转旋翼机飞行操纵控制系统研究(郭剑东)

第二十四届(2008)全国直升机年会论文小型无人倾转旋翼机飞行操纵控制系统研究郭剑东 宋彦国 夏品奇(南京航空航天大学 直升机旋翼动力学重点实验室,南京 210016)摘 要: 本文通过研究倾转旋翼机的飞行动力学模型,建立了小型无人倾转旋翼机在直升机、倾转及飞机飞行模式的飞行力学模型。
仿真计算得出配平工作点处各通道的操纵量和飞行器的飞行姿态,并提取了工作点处的线性模型。
采用特征结构配置理论实现了小型倾转旋翼机的角速率解耦控制(RCAH ),在各通道解耦的基础上利用经典控制理论完成了姿态保持控制(ACAH )。
通过仿真结果表明设计的控制系统具有良好的指令跟踪性能。
关键词:倾转旋翼机;非线性方程;特征结构配置;引 言倾转旋翼机属于垂直起降飞行器(VTOL :Vertical Take-Off and Landing )的一个重要分支,兼有直升机和飞机的优点,具有直升机垂直起降和空中悬停,固定翼飞机高速前飞的特点[1、2]。
飞行模式多样,具有直升机飞行模式、过渡飞行模式和飞机飞行模式,过渡飞行模式的操纵与控制技术是亟待解决的关键技术。
近年来我国十分重视倾转旋翼机相关技术的发展和理论知识的积累。
本文针对小型无人倾转旋翼机建立了全量非线性飞行动力学数学模型,并在Matlab 的Simulink 的仿真环境中建立飞行力学仿真模型,展开该飞行器飞行性能与操纵控制策略的仿真。
1 小型无人倾转旋翼机飞行动力学模型 1.1 数学模型分析该飞行器飞行操纵控制策略的基础是系统的飞行动力学数学模型。
在分析时假定小型倾转旋翼机为刚体,在空中的运动有6个自由度,即质心的3个移动自由度和绕质心的3个转动自由度。
其机体坐标系如图1所示。
分别建立倾转旋翼机的旋翼、机翼、发动机短舱、机身、平尾、垂尾的风轴坐标系,在各自坐标系中计算气动力及力矩,最后将力及力矩通过坐标转换至重心,各部件的计算方法参考[3、4],合外力及外力矩分别为:),,(,,z y x i M F i i =即),,(z y x i = (1)其中,下标ir 表示右旋翼,il 表示左旋翼,iw 表示机翼(包括副翼),ip 表示发动机短舱,if 表示机身,ih 表示平尾(包括升降舵),iv 表示垂尾(包括方向舵)。
微小型四旋翼无人直升机建模及控制方法研究_1_5(1)(1)
系统的仿真模型,以对ADRC 飞行控制器的控制性能进行验证。
下面,将首先分析ADRC 的控制性能;然后,考察θ−x 和φ−y 通道所采用的PD-ADRC 双闭环控制器的性能。
§4.4.1 ADRC 控制仿真结果与分析系统(4.30)~(4.31)的直接驱动部分都采用了ADRC 控制器。
应用ADRC 的一大难点在于其参数的调节,需要根据§4.3.3给出的原则进行整定。
选取控制周期001.0=h ,则TD 的快速因子100000=r ,滤波因子h h 100=;ESO 的六个参数选取为§4.3.3中的推荐值;NLSEF 的参数整定结果见表4.1。
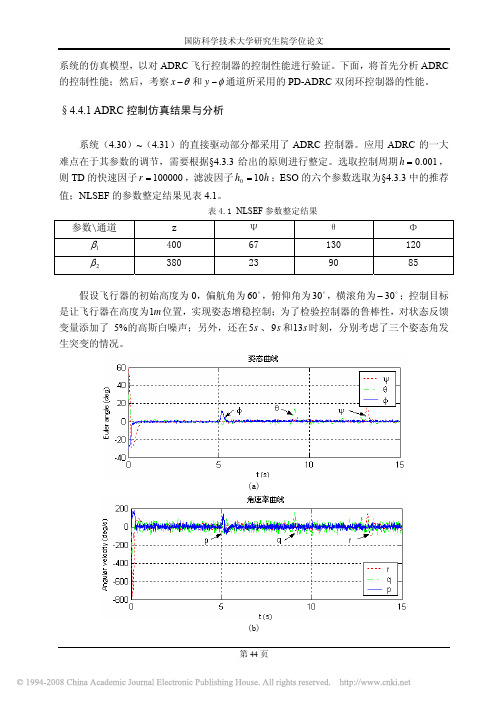
表4.1 NLSEF 参数整定结果 参数\通道 zΨ θ Φ 1β 40067 130 120 2β380 23 90 85 假设飞行器的初始高度为0,偏航角为D 60,俯仰角为D 30,横滚角为D 30−;控制目标是让飞行器在高度为m 1位置,实现姿态增稳控制;为了检验控制器的鲁棒性,对状态反馈变量添加了5%的高斯白噪声;另外,还在s 5、s 9和s 13时刻,分别考虑了三个姿态角发生突变的情况。
(a)(b)(c)图4.4 基于ADRC 的姿态增稳和飞行高度控制仿真曲线从图4.4可以看到,在ADRC 控制器的控制之下,飞行器在s 1时间内就可以完成调整,实现姿态增稳和飞行高度控制。
另外,对于传感器噪声和状态突变,ADRC 具有良好的鲁棒性来克服其影响。
此外,由图(c)还可以看到,飞行器发生俯仰和横滚转动时,飞行高度均会受到影响。
接下来,将分别通过z 通道TD 、θ通道ESO 的输出曲线来说明ADRC 是如何“安排过渡过程”和进行“扰动估计”的,以进一步分析其性能。
(a)(b)图4.5 z 通道TD 安排过渡过程由图4.5可以看到,TD 在输入信号发生阶跃跳变的时候,安排了一个“过渡过程”,其输出1v 能快速而又无超调地跟踪阶跃输入信号d z ,2v 则是d z 的广义微分。
一种小型无人直升机航模的结构设计
一种小型无人直升机航模的结构设计作者:钱海燕来源:《科技风》2017年第22期DOI:10.19392/ki.16717341.201722001摘要:设计了一种低成本、具备一定自主飞行能力的无人直升机飞行控制系统,针对主要模块进行功能设计,使该控制系统的运行效率最大化。
关键词:自动控制无人直升机传感器无人直升机航模种类繁多,其结构基本是仿照真直升机设计,无需特制的发射、回收装置即可实现正常的起飞和降落,便于进行飞行测试以及在复杂飞行条件下执行任务。
常见的航模直升机,其主要部件包括机架、尾杆、起落架、头罩、主旋翼头、副翼、发动机、主桨、尾桨、平尾、垂尾等,再加上遥控器、接收器、舵机和陀螺仪等各种电子控制设备,一架航模直升机就完成了。
飞行控制系统是整个无人直升机的核心,是典型的多变量、强耦合自动控制系统。
主处理器通过多路舵机控制着直升机的飞行状态,同时各种位置、姿态、高度、航向等传感器将当前的飞行状态反馈给主处理器,主处理器再依据反馈的信息调整控制信号,控制其自主飞行。
1 十字盘的选择对于直升机而言,旋翼是为其提供力和力矩的主要部件,可分为主旋翼和尾旋翼。
其中尾旋翼结构相对简单,通过改变其总力矩来控制直升机的偏航运动。
而主旋翼结构比较复杂,除了可以通过改变总螺距来改变升力外,还可通过改变十字盘的倾角来改变周期螺距,从而产生滚转和俯仰力矩。
十字盘是直升机上最关键的操纵机构。
传统的十字盘是由单独的马达控制单独的通道,结构简单,一个舵机控制多个动作,其缺点则是每一个控制通道的力矩只能由一个伺服承受,这也提高了对伺服器扭矩方面的要求。
而CCPM(即差分螺距混合控制)十字盘的三个制动点以120°夹角分布于十字盘上,以舵机直接驱动十字盘,借助遥控器计算机进行混控,来完成十字盘前后、左右转动,以及升降的动作。
主旋翼总螺距(十字盘的升降)是所有舵面控制中负载最大的,由三个舵机一起等量动作才可以完成,制动力量是传统十字盘的三倍;同样的升降舵(十字盘前后翻动)也要动用三个舵机,也得到了三倍的制动力量;副翼舵(十字盘左右翻动)由两个舵机一同动作完成,副翼舵也有两倍的制动力量。
小型无人直升机结构控制系统及其监视系统的设计
科技创新导报 Science and Technology Innovation Herald16航空航天科学技术中小型尤其是小型无人机在当前的国际社会和国内社会都比较受追捧,我国无人机的发展也备受重视,目前国家通过大量的资金和技术的投入,使得无人机的发展进入到了高速上升期。
研究无人机,主要是设计出能够实现自主飞行的无人机,针对那些通过遥控来飞行的无人机,由于技术落后,现在也已经迈入了江河日下的层面。
共轴双桨直升机的研究是目前直升机发展的一个趋势,各个国家现在都非常重视这方面的研究。
无人遥控直升机具有操纵难度较大、飞行姿态不够平稳、遥控距离较近等问题。
共轴直升机由于只有解决了上述问题,此类型直升机才能真正投入使用目前的无人机直升机系统,通过安装无线监控系统来对其他需要被监测的来进行侦查,因此这个系统主要是由摄像头、数据采集器单片机组成,摄像头和数据采集器采集的数据通过单片机处理后储存下来。
通过监视系统工作人员能更加直观且清晰的知道直升机的飞行状态,获得实时数据并为操作的人员的控制提供了极大帮助。
1 直升机的总体设计1.1 研究意义小型无人机在军事领域和民用领域都有着重要作用,欧美等发达国家广泛将先进的无人机系统应用在了军事领域,并且取得了一系列可喜的成绩,小型无人机能够短距离起降,因此能够在任意不同的地形进行起飞,凭借小机身和灵活的起降,可以广泛应用于经济建设、生态保护、国防和科研等领域。
在附加图像采集任务仓后,它还能进行光学观察、通信中继和遥感遥测,可以航空摄影、地形测绘、公路铁路建设、水电站勘察设计、输电线路建设、城市规划、农田水利设施、房地产、大型工程建设、电视拍摄等领域发挥积极作用,特别是军事上,可以执行侦察、火炮校射、安全防卫、靶机、反恐等任务,具有极高价值。
共轴直升机又在很多方面有着绝对的优势,其研究价值不言而喻,可以说共轴直升机是直升机研究领域的一个趋势。
该次设计旨在为小型共轴无人直升机的发展做出力所能及的贡献,引起大家的重视,推动其发展。
微型四旋翼控制系统设计

微型四旋翼控制系统设计0 前言无人飞行器(UAV)自主飞行技术多年来一直是航空领域研究的热点,并且在实际应用中存在大量的需求,例如:侦察与营救任务,科学数据收集,地质、林业勘探,农业病虫害防治,以及视频监控,影视制作等。
通过无人飞行器来完成上述任务可以大大降低成本和提高人员安全保障。
无人飞行器的主要优点包括:系统制造成本低,在执行任务时人员伤害小,具有优良的操控性和灵活性等。
而旋翼式飞行器与固定翼飞行器相比,其优势还包括:飞行器起飞和降落所需空间少,在障碍物密集环境下的可控性强,以及飞行器姿态保持能力高。
由国际无人运输系统协会(International Association for Unmanned Vehicle Systems)组织的一年一度的国际空中机器人竞赛(International Aerial Robotics Competition),为自主旋翼式飞行器的应用潜力研究提供了一个很好的展示平台。
该竞赛吸引了来自全世界不同国家研究团队的参与,来完成预先设定的自主飞行任务。
在无人飞行器自主飞行的众多技术当中,飞行器自主飞行控制算法的设计一直是控制领域众多研究者最关心的问题之一。
经典的控制策略在飞行器系统的某个特定作用点上往往首先将系统模型线性化,然后在此基础上运用经典控制理论对系统进行分析和控制,控制精度和控制能力偏弱。
相比之下,运用现代非线性控制理论设计的控制算法,其性能明显优于经典控制算法。
小型四旋翼飞行器与其它飞行器相比,其优势在于其机械结构较为简单,并且只需通过改变四个马达的转速即可实现控制,且飞行机动能力更加灵活。
另一方面,小型四旋翼飞行器具有较高的操控性能,并具有在小区域范围内起飞,盘旋,飞行,着陆的能力。
飞行器可以飞至离目标更近的区域,而不像传统直升机由于其巨大的单旋翼而不能近距离靠近目标。
同时,小型四旋翼飞行器研究也为自动控制,先进传感技术以及计算机科学等诸多领域的融合研究提供了一个平台。
微小型四旋翼无人直升机建模及控制方法研究
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
无人直升机飞行控制系统设计分析报告
无人直升机飞行操纵系统设计报告摘要:本文介绍了用于无人直升机操纵的飞行操纵系统结构和分部分的要紧性能,详细阐述了系统设计方案以及设计思想。
一整体系统描述整个系统能够分为机载部分和地面部分,机载部分负责维持飞机的稳定飞行并提供图像信息给地面部分,地面部分依照飞机的状态以及得到的图像信息作出下一步飞行的目标规划并发送给机载部分,同时为了确保安全,防止自主飞行机构失控,添加了可由操作手操纵的操纵器。
地面部分与机载部分之间有两条数据链路一负责传送图像和传送飞行状态和指令。
图像传送的数据链路通过购买成品解决,另外负责传送飞行状态和指令的部分也差不多有方案能够解决(目前正在开发的部分尽管包括扩频通信,然而由于技术缘故不能确保在竞赛中的可用性,因此这部分只是作为研究性的项目)。
地面部分能够分为地面站和图像处理平台,前者与机载飞行操纵器通讯以发送操纵命令并获得飞机状态信息,后者猎取机载摄像头的图像并做处理以搜寻竞赛目标。
机载部分将在后一部分详述。
二飞机内部系统描述为了完成自主飞行任务飞机需要相关功能部件完成对飞机状态信息的采集、对执行部分的操纵以及对地面站命令的响应等功能。
在无人机上,替代飞行员或操作手完成飞行任务的自主机构包括图像设备、飞 控模块、高度测量、舵机操纵、数据链路以及航姿仪等,如下图所示:路 航姿仪 各个模块之间相对独立,均可单独完成一定的功能,模块之间的相 互连接釆纳总线实现,硬件上采纳PC 104标准,便于安装和系统集成。
尽管采纳的总线是较可靠的通讯标准,然而在直升机实际飞行的环境中舵机操纵 数据链图像设备飞控模块 高度测量存在震动、电磁等干扰因素,可能阻碍到数据传输的可靠性,为了保证正确的数据传输,采纳了两套互为备份的总线系统一一422总线和CAN 总线。
422总线为现有UAV系统采纳的标准,具有技术较成熟的优势;CAN总线关于数据包的传送更为方便,克服了 422只能采纳主从模式以及工作在轮询模式的缺点,同时具有更高的数据传输速度,是一种较新的标准,使用CAN总线也是对系统方案升级的尝试。
小型无人倾转旋翼机全模式飞行操纵控制

小型无人倾转旋翼机全模式飞行操纵控制文章根据飞行特点和相关知识建立了倾转旋翼机飞行的数学方程,通过模型确定了小型无人倾转旋翼机在直升、倾转和飞行模式下的通道操纵量和飞行姿态,得出了小型无人机各种状态下的飞行策略。
标签:倾转旋翼机;配平;解耦控制2.2 倾转模式飞行在对小型无人倾转旋翼机在倾转模式下进行配平时,倾角In 從0°变化到90°,前飞速度为16~25m/s,为了抵消桨叶有效迎角减小引起的推力足足问题,应增大桨叶的安装角即增加总距的操纵。
前飞速度增大升降舵偏角也会随着增大,在飞机进入倾转后期时,纵向周期变距明显减弱。
根据实验结果计算得机翼安装倾角为3°~5°时,倾转过渡模式可以较为顺利的过渡。
2.3 飞机模式飞行在对小型无人倾转旋翼机在倾转模式下对应图3中25~35m/s。
随着前飞速度增大,无人机的机身重力与升力互相平衡飞机平稳向前飞行。
飞行的动力由旋翼提供,由于速度不断增加所以总距操纵也相应增加。
图3中俯仰角随随飞速度增加而逐渐减小情况对应,与实际飞机固定翼飞机的飞行特性相吻合,均具有固定翼飞机的飞行特性。
2.4 全模式飞行对试验所用小型无人机进行各个飞行模式的试飞试验,同时对倾转旋翼机的转换走廊进行研究。
小型倾转旋翼机在直升机模式下垂直起飞,协调操纵总距和纵向周期变距是飞机模型进入倾转模式,通过旋翼和水平安定面相互协调操纵保持模型的平衡;主要由旋翼和水平安定面相互协调操纵,同时根据前飞速度对短舱的倾角进行调整;倾角In=90°时模型进入飞机模式飞行,此时模型机翼提供的升力与其重力相互平衡,前进速度由旋翼提供。
3 实际模型设计最终的实际模型在经历数次试验后经由Solidworks软件进行建模并转换为平面切割图纸后终于制作完成。
由于两轴模式对重心的要求极高,为了适应多种机型重心不同的情况,可选择在尾部安置类似直升机锁尾的变距结构,配套的动力应较主动力小一级别,这样即使重心出现偏差,也可以最大程度上修正平衡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
$ B , + C $ ( B ( & $ ( B C
微型无人直升机旋翼操纵机构设计及分析
吕俊刚 = 汪家道 = 陈大融
清华大学 精密仪器与机械学系 =北京 $ % % % B ( .
摘
要 D针 对 微 型 无 人 直 升 机 体 积 小 ! 载 重 量 轻 的 特 点" 论
有 人 直 升 机 的 旋 翼 操 纵 机 构 非 常 复 杂= 尤其是 它的核心部件 88 自动倾斜器的结构更为复杂 H 对 于一般无人直升机来说 = 由于载重量有限 = 结构相对 为了 增加有 效载 荷 = 要求机载设备及操纵机构重量
P 中图分类号 D> * C ’ A $
比较简单 = 旋翼一般多采用单旋翼加副翼式的结构 H
的操纵机构上做了一定的简化 H 微型无人直升机 旋翼旋转直径通常在 * % % JJ 以下. 的载 重量 很 小 = 甚 至 需 要 以 克 来 衡 量= 所以为 了进 一步减 轻旋 翼 操 纵 机 构 的 重 量 = 仅对它进行进 一步的简化和对旋翼操纵机构的简单缩小还是很难 完全达到设计目标 H 由于在设计微型无人直升机旋 由微型高速轴承 9 减速机构等部件组 翼操纵机构时 = 成的传动与旋翼操纵机构的复杂部件在尺寸很小时 将大大增加加工难度 = 导致加工成本大幅度增高 = 而 所以 = 它 且极有可能出现某些部位强度不够等问题 H 的旋翼操纵机构相对于普通直升机和一般无人直升 机必 须有很 大的 改 变 = 甚至在操作原理上都要有本 质的区别 H 本文论述了一种利用惯性力的作用和材料弹性 性能 的微型 无人 直 升 机 旋 翼 操 纵 机 构 = 这种机构结 构简单 = 而又能 满 足 微 型 无 人 直 升 机 各 种 飞 行 模 态 的需要 H 同时 = 本文还针对该机构的特点 = 分析了桨 叶在旋翼瞬间加速旋转条件下摆振运动的特点 H
其中 #7 为电机输出扭矩 "
图 ; 旋翼操纵机构受力分析 图 0 旋翼桨距角在瞬间加速下的变化
2 3 根 据 叶 素 法 桨 叶 升 力 公 式1 两片桨叶产生的 #
由材料力学可知 # 悬臂梁的悬臂端转角大小为 9 : > . ? @ > 式 中 #? < * @ = > 为 弹 性 连 杆 的 抗 弯 刚 度 " 所 以 #< < = <* 7: : > > 则 "令 A* #: > 为弹性连杆的长度 # : ? @ : ? @ > > < = <* A7. A 即为旋翼桨叶的迎角相对于电机输出转距的影 响系数 # 它与主轴悬臂的长度 B 弹性连杆材料的弹性 模量以及弹性连杆绕 C方向的惯性矩有关 "
! " " #$ % % % & % % ’ ( ) #$ $ & * * * + , #
清华大学学报 自然科学版 .* % % *年 第 ( *卷 第 $ $期 . =* % % * =>? A ( * = #? A $ $ /01 2 3 4 5 6 783 2 9" : 2 ; 0< : 5 @
$ % 况# 而 很 少 涉 及 加& 减 速 过 程 时 动 力 响 应! 或者是 !
P . / 3 2 2 2 2
B G C C C I P2 J HC I P2 J % H -K# , + , 3 2 2 C
# 微型无人直升机旋翼操纵机构原理
图 $为根据上述原则设计的一种微型无人直升 机旋翼操纵机构的原理图 H 它通过电机的瞬间加速 = 利用 旋翼桨 叶的 惯 性 力 = 使弹性连杆变形来达到控 制旋翼的目的 H
收稿日期 D* % % * & % $ & + % 基金项目 D清华大学 E 九八五 F资助项目 % B * * % % $ % * . 作者简介 D吕俊刚 汉. $ G C ( & . =男 =江西 =博士研究生 H 通讯联系人 D陈大融 =教授 =I & D: MN A A J7 2 @ 5 < 3 K L 2 JA O 1 2 3 4 5 6 7 < K 6 : 3
图 ! 微型无人直升机旋翼操纵机构原理图
化量大小相等 "
在这个操纵机构中使用弹性连杆来传递从旋翼 旋翼有两片桨叶 # 采用无铰 主轴到旋翼的驱动力矩 " 式连接 # 旋翼是套接在旋翼主轴的上端部的 # 它可以 绕旋翼桨叶轴线方向作小角度转动 " 弹性连杆和桨 叶的刚性部分相连 # 当电机突然加速转动时 # 弹性连 杆 会 在旋翼惯性 力 的 作 用 下 产 生 变 形 # 此变形带动 旋 翼绕桨叶轴线方 向转动而改 变安 装 角 $ 和% "光 电传感器和位置控制码盘用来检测旋翼所在的方 位# 以便驱动电机控制和改变机体的飞行状态 " 当 电 机 为 匀 速 转 动 时# 两片桨叶的有效迎角相 等# 即& ’ ( +, # )* $ ’ ( . - * %+ , 其中 #, 为入流角 "此时 # 如图 所示 #$ *% #所以 / *’ " ’ ( ( ) -
* 7 轻9 体积小 9 结构简单 6 H 所以无人直升飞机在旋翼
述了一种利用惯性力的作用和材料的弹性性能对旋翼进行 操纵的机构 # 该机构对电机驱动力矩的变化 反 应 灵 敏 " 能够 考虑离心力 满足控制微型无人直升机各种飞行模态的需要 # 应用 $% 并 的影响 " &’ ( ) * +原 理 建 立 了 桨 叶 的 摆 振 运 动 方 程 " 用广义 , 分析了微型直升机旋 % ( . / ’ +法 对 方 程 进 行 求 解 " 翼桨叶变速度旋转时在摆振平面内的弯曲 振 动 # 结 果 表 明 0 轴心到桨叶根部的回转半径和旋翼的变速度回转对桨叶变 形有影响 1旋翼初始回转角速度对桨叶的摆振频率有影响 # 关键词 D无人直升机 1操纵机构 1旋翼桨叶 1摆振
旋翼旋转时所受 的阻力 矩 78 是由 弹性 连杆与 旋翼连接处的力 9 相 对旋翼 主轴 的力矩 来平衡 的 # 它的力臂长度为旋翼主轴悬臂的长度 : #如 图 2所 示" 可以得出 # 不论在旋翼匀速旋转还是加速旋动的 情况下 # 弹性连杆端 部的受 力 9 与电机 的输 出转距 都是成正比的关系 & 9* 7 . :
态" 而航向的变化可以通过改变尾翼的转速来实现 "
0 微型无人直升机旋翼操纵机构分析
由 于 旋 翼 是 套 接 在 旋 翼 主 轴 上 的# 所以它的转 动不是 直接 由旋 翼 主 轴 来 带 动 的 # 而是通过与其相 连的弹性连杆来带动 " 弹性连杆与旋翼连接端的转 角 变化和 旋翼桨 叶 迎 角 的 变 化 是 一 致 的 # 它们的变
; 旋翼桨叶摆振运动分析
直升机旋翼可以看作是由刚体和柔性体组成的
B $ m b
清 华 大 学 学 报 I 自 然 科 学 版J
C E E C ! $ C I B B J
刚柔 耦 合系统 ! 建立它的动力学模型需要考虑到大 范围的刚体运动与弹性小变形运动的耦合问题 " 目 前这类问题的研究基本上是针对定常角速度的情
-
升力是相等的 # 这时机体处于悬停或垂直运动状态 " 当光电传感器通过位置控制码盘检测到弹性连杆和 由控制电路使电机 )号 桨 叶 转 到 机 体 后 方 位 置 时 # 瞬间加速 " 这时 # 由于桨叶的惯性力的作用 # 使弹性 连 杆 发生弯曲变 形 # 弹性连杆弯曲变形的结果使得 )号 桨 叶 的 安 装 角 $大 于 -号 桨 叶 的 安 装 角 % #如 图这时两片桨叶的有效迎角 ’ 5’ #根 4所示 " ( ( ) 据 叶 素 法 桨 叶 升 力 公 式 可 知# 两叶片产生的升力 样 会 对 机 体 产 生 一 个 向 前 倾 的 转 矩# 使 56 #这 6 ) 万方数据 旋翼的气动力前倾 # 产生一个向前的分力 # 使机体处
不论是有人直升机还是无人直升机都是依靠旋 翼 来控制飞行的 = 旋翼气动力的大小和方向的改变 都 会直接影响直 升 机 的 飞 行 状 态= 因而旋翼的控制 万方数据 对直升机的飞行是至关重要的
6 $ 7
H
吕俊刚 #等 &
微型无人直升机旋翼操 " 同理也可实现机体的左右侧飞和向后飞行的状
文献标识码 DQ
文章编号 D$ % % % & % % ’ ( * % % * . $ $ & $ ( B ( & % (
R S T U V W X W Y Z [ Y \ Y []T S X ^ _ U T \ X Y S]‘ a b T S X W ] Z Y [_ S ]T S S ‘ c]X a [ Yb ‘ U X a Y ^ \ ‘ [ W
e d 8f g h i j h i =kl m nf o j p j q =r s t mu j v q h i w ‘ ^ T [ \ ]‘ S \ Y Z x [ ‘ a X W X Y Sy S W \ [ _ ]‘ S \ W T S cz‘ a b T S Y U Y { V = | W X S { b _ T} S X ~ ‘ [ W X \ V =! ‘ X " X S {# $ $ $ % & =’ b X S T . R ( W \ [ T a \ D0 5 <1 J7 @ @1 2 ) <7 3 K@ ? *: 7 L L + 2 3 4: 7 N 7 : 2 O +? ,6 3 J7 3 3 < K J2 : L ?5 < @ 2 : ? N O < L 1L < 6 2 L < 17L ? O ? L J7 3 2 N 6 @ 7 O 2 ? 3 J< : 5 7 3 2 1 J O 5 7 O J7 . < 16 1 <? , O 5 <L ? O ? L2 3 < L O 2 77 3 KJ7 O < L 2 7 @ < @ 7 1 O 2 : 2 O +7 3 KJ< < O 1O 5 < L < 6 2 L < J< 3 O? ,O 5 <5 < @ 2 : ? N O < L, @ + 2 3 4J? K <: ? 3 O L ? @ A0 5 <J< : 5 7 3 2 1 J 6 2 : . @ +, ? @ @ ? *1: 5 7 3 4 < 1? , O 5 <J? O ? L? 6 O N 6 O J? J< 3 O A0 5 << 6 7 O 2 ? 3 , ? L O 5 <L ? O ? L / @ 7 K <@ 7 4*7 1K < L 2 9 < K6 1 2 3 4O 5 <07 J2 @ O ? 3N L 2 3 : 2 N @ <7 3 K 1 ? @ 9 < K6 1 2 3 4O 5 << 1 O < 3 K < K2 7 @ < L . 2 3 J< O 5 ? K A0 5 </ @ 7 K <@ 7 4 4 2 3 4 J? O 2 ? 3, ? LO 5 <: ? 3 K 2 O 2 ? 3? , 9 7 L + 2 3 47 3 4 6 @ 7 L9 < @ ? : 2 O 2 < 1*7 17 3 7 @ + ) < K A 0 5 <L < 1 6 @ O 1 2 @ @ 6 1 O L 7 O <5 ? *O 5 <L 7 K 2 6 1 ? , O 5 <L 2 4 2 K: < 3 O < L / ? K +7 3 KO 5 < 9 7 L 2 ? 6 1 7 3 4 6 @ 7 L 7 : : < @ < L 7 O 2 ? 3 1 ? ,O 5 < L ? O ? L 7 , , < : OO 5 < / @ 7 K < K 2 1 N @ 7 : < J< 3 O 17 3 K5 ? *O 5 < 2 3 2 O 2 7 @ 7 3 4 6 @ 7 L 9 < @ ? : 2 O +? , O 5 < L ? O ? L 7 , , < : O 1 O 5 </ @ 7 K <@ 7 4, L < 6 < 3 : + A 3‘ V4 Y [ c W D6 3 J7 3 3 < K5 < @ 2 : ? N O < L 5 J7 3 2 N 6 @ 7 O 2 ? 3 J< : 5 7 3 2 1 J5 L ? O ? L / @ 7 K < 5@ 7 4J? O 2 ? 3