ARM for ubuntu
linux?ubuntu?X86和ARM平台QT安装步骤

linux ubuntu X86和ARM平台QT安装步骤Linux ubuntu 平台:3种方式1、直接安装:sudo apt-get install libqt4-dev qtcreator(最好)2、源代码安装,一般不用3、sdk安装:下载sdk:sudo apt-get install libglib2.0-dev libSM-dev libxrender-dev libfontconfig1-dev libxext-devARM平台:1、安装交叉工具链,能够使用arm-linux-gnu-gcc命令编译如4.1.1版本的:mkdir /opt/crosstooltar -jxvf 路径/4.1.1_softfloat_withlib.tar.bz2 -C /opt/crosstool //将编译工具解压到crosstool中。
配置环境变量,当用arm-linux-gnu-gcc 编译程序时能够找得到此文件所在的目录例:vim /home/farsight/.bashrc在末尾添加:export PATH=$PATH:/opt/crosstool/4.1.1/bin2、看 4.1.1/arm-linux-gnu/lib下是否有zlib,libjpeg,libpng,freetype库文件如果没有,安装:以zlib为例:从下载源码tar -jxvf xxx/zlib-1.2.5.tar.bz2cd zlib-1.2.5CC=arm-linux-gnu-gcc AR=arm-linux-gnu-ar RANLIB=arm-linux-gnu-ranlib LD=arm-linux-gnu-ld ./configure --prefix=/opt/crosstool/4.1.1/arm-linux-gnumakemake install其他的网址是:安装步骤和上面一样3、Qt默认的ARM交叉编译器是:arm-linux-开头的,但是系统开始安装的是arm-linux-gnu开头的,所以要改qt源码:例:vim qt-everywhere-opensource-src-4.6.3/mkspecs/qws/linux-arm-g++/qmake.conf在arm-linux-后加个gnu,例:arm-linux-gnu-gcc...4、qt配置细微配置:编译qconfig,用qconfig执行相应的文件cd qt-everywhere-opensource-src-4.6.3/tools/qconfigqmakemakesudo cp qconfig /usr/bincd qt-everywhere-opensource-src-4.6.3/src/corelib/global qconfig qfeatures.txt...粗配置:使用./configure --help5、安装文件。
Ubuntu下编译ARM平台QtEmbedded的MySQL和MySQL插件

(原创)Ubuntu下编译ARM平台QtEmbedded的MySQL和MySQL插件需要引用的同学请注明文章出处,谢谢最近需要将一个程序移植到arm平台上,程序调用了MySQL数据库,所以就牵扯到将MySQL数据库移植到ARM平台上面,所以在网上大量查阅资料。
在baidu文库发现了一篇文档,是wlzxlc上传的文档名称为:《编译ARM平台的QtEmbedded的MySQL 插件和移植MySQL》。
下面说明里面介绍到:ARM平台下的QtEmbedded所需mysql插件,及MySQL的移植。
我的整个移植过程参考了这篇文档,但是遇到了很多的问题,所以又上网搜寻其它资料。
现在我已经移植成功,回头看这篇文档,就发现里面有很多疏漏甚至是错误。
这些东西如果不详细注明出来,更多的新手绝对还会重蹈我的覆辙,所以在这里将mysql 的arm+linux移植经验贴出来,希望对新手以及做相关方面工作的人能有帮助。
所有在《编译ARM平台的QtEmbedded的MySQL插件和移植MySQL》这篇文档中的错误以及注意事项,我也会一一列出,在下面我将其称为“原文”。
编译器:arm-linux-gcc(4.3.2)Pc平台:ubuntu在移植之前有必要先说明一下几个问题:1.MySQL还没有支持交叉编译的版本出现.但为了让编译继续,必须在configure脚本中将多处不支持交叉编译的命令全都注释掉,才能让configure顺利通过。
2.交叉编译过程中需要用到ncurses-5.6下的libncurses.a库,而这个库文件也必须是arm 平台下的,所以我们在交叉编译MySQL时需要先自己手动交叉编译libncurses.a的库。
(原文是说需要libncurses.so.5文件,这里我查阅很多资料发现,应该是libncurses.a)3.编译过程中需要运行gen_lex_hash,但这个命令是arm格式的在pc机上运行不起来,解决方法是要编译好一个在pc上运行的mysql,从相应的目录下拷出gen_lex_hash覆盖相应目录下的这个arm格式的gen_lex_hash (这里要注意的是这个pc机上运行的mysql编译路径要和现在这个arm上运行的mysql路径完全相同,否则后面同样的问题中执行命令时涉及到路径问题,解决办法是先把现在编译的arm平台的mysql目录改为其他名称,再解一个mysql包改名为mysql将其编译成pc上运行的版本,只要简单的用./configure |make就行了,再把pc版本的mysql改为mysql-pc,将原来的那个名称改回mysql即可(貌似有点晕乎)。
【原创教程】三星ARM chromebook在SSD硬盘上安装UBUNTU(FROM- MASA)强烈推荐!!
【原创教程】三星ARM chromebook在SSD硬盘上安装UBUNTU(FROM: MASA)强烈推荐!!介于SD卡安装ubuntu虽然比较完美,但是还是取决于读卡速度的小缺憾,我心里总是有些阴影,这几天又查了一些资料,发现其实可以在电脑的硬盘里分区安装UBUNTU,过程简单,很容易操作。
而且用下来感觉很完美,所以强烈推荐一下。
安装步骤如下:1、进入开发者模式:先把你的chromebook关机,按住ESC键和更新键(更新键在键盘最上面箭头键的右边)。
然后按住电源键。
在出现开机画面时迅速按CTRL+D(一定要快),然后你就会清理chrome os上的数据进入开发者模式,时间大约是15分钟。
2、进入终端:进入开发者模式之后,电脑会自动重启,画面到选择wifi的时候你要连上网络,之后会出现一个登陆GOOGLE帐号的画面,千万不要登陆这个帐号,这时候按住CTRL+ALT+=>键(=>就是在PC机上的F2位置,在最上面那一排。
)不要使用平常的CTRL+ALT+T进入终端,要用CTRL+ALT+=>,这样确保没有任何人登陆。
3、在终端操作:首先在终端下用用户名“chronos”登陆,不需要任何的密码;登陆之后输入代码:wget http://goo.gl/34v87; sudo bash 34v87这一步很关键,不要输入错误,注意空格,如果你输入代码,显示出一个“not found“的错误,你注意一下自己的电脑是不是联网了。
你会看见关于你电脑的一些信息,按ENTER键继续。
4、下面开始分区:CHROME OS的系统自动会占有11G的硬盘,刚才你输入的代码会压缩chrome os的这个系统盘空间,用来安装ubuntu,你输入范围以1G为单位在5至10G之间递增,一般不建议超过9G,我在这里输入的数字是8。
当你输入数字之后,你的硬盘会自动分区,然后chromebook会重启,一直到开机的欢迎画面。
ARM设置无图形界面启动
让Ubuntu10.04 开机直接进入字符界面,有时候复制一些资料,修改配置文件等工作,不需要进入图形界面,如何在开始菜单增加一个命令界面呢?一、修改grub.cfg属性grub.cfg默认为只读的,我们要修改它,必须加上写属性。
sudo chmod +w /boot/grub/grub.cfg三、修改grub.cfgsudo vim /boot/grub/grub.cfg打开文件之后,发现第一个菜单项:menuentry 'Ubuntu,Linux 2.6.32-22-generic-pae' --class ubuntu --class gnu-linux --class gnu --class os {recordfailinsmod ext2set root='(hd0,7)'search --no-floppy --fs-uuid --set 7dde7e5c-249c-4128-b148-8ebae100cc7alinux /boot/vmlinuz-2.6.32-22-generic-pae root=UUID=7dde7e5c-249c-4128-b148-8ebae100cc7a ro quiet splashinitrd /boot/initrd.img-2.6.32-22-generic-pae}我们把他复制一份,之后修改一下:menuentry 'Ubuntu,Linux 2.6.32-22-generic-pae(commmand mode)' --class ubuntu --class gnu-linux --class gnu --class os {recordfailinsmod ext2set root='(hd0,7)'search --no-floppy --fs-uuid --set 7dde7e5c-249c-4128-b148-8ebae100cc7alinux /boot/vmlinuz-2.6.32-22-generic-pae root=UUID=7dde7e5c-249c-4128-b148-8ebae100cc7a ro quiet textinitrd /boot/initrd.img-2.6.32-22-generic-pae}注(修改两处):1、在菜单项里写入command mode ,这个作为标识,随意写!如“text mode”2、把quiet splash删除,加上text四、其他保存重新开机就会发现多了这么一个项目。
Ubuntu下arm程序下载环境搭建(minicom,dnw)

二、Linux下的dnw
1、下载
/detail/ysj427/4369175
2、下载回来解压。
目录如下:
dnw_linux/
dnw_linux/secbulk/
dnw_linux/secbulk/Makefile
dnw_linux/secbulk/secbulk.c
一、超级终端minicom
1、安装:
sudo apt-get install minicom
2、配置通信协议:
1rl + a, 放开, 再按o, 出现配置菜单.
3. 选择 Serial port setup, 此时所示图标在“Change which setting”中,键入“A”,此时光标移到第A项对应处:串口COM1对应ttyS0, COM2对应ttyS1. (注意选择)
| B - Lockfile Location : /var/lock |
| C - Callin Program : |
| D - Callout Program -: |
(3)C键:清除屏幕的显示内容;
(4)B键:浏览minicom的历史显示;
(5)X键:退出mInicom,会提示确认退出。
3、配置文件所在目录
Ctrl + A --> O
+-----[configuration]------+
| Filenames and paths |
| File transfer protocols -|
| Change which setting? |
+-----------------------------------------------------------------------+
Ubuntu与arm开发之间FTP文件传输

Ubuntu与arm开发之间FTP文件传输1、首先启动虚拟机中ubuntu下的vsftp服务:sudo /etc/init.d/vsftpd start开发板在启动时已经开启了ftp服务。
2、在ubuntu中使用命令ftp 192.168.1.230(开发板IP)输入用户名plg输入密码plg3、已经进入了ftp服务默认的接受位置在/home/plg使用lcd命令设置ubuntu下文件接收位置ftp>lcd /home/glorin/work/linux4、文件传输使用cd命令进入开发板上要进行文件传输的目录使用get命令从开发板上将文件传输到ubuntu中设置的目录下使用put将ubuntu下设置目录的文件传输到开发板ftp>put hello5、使用bye退出ftp最常用的命令有:ftp> help 列出ftp 文件传输,可使用之任何命令。
ftp> !ls 列出本地工作站,目前目录下之所有文件名。
ftp> !pwd 列出本地工作站,目前所在之工作目录位置。
ftp> ls 列出远端工作站目前目录下之所有文件名。
ftp> dir 列出远端工作站目前目录下之所有文件名(略同于UNIX 的ls -l 指令).ftp> dir . |more 同上,但每页会暂停(可能不适用Unix 以外的ftp)。
ftp> pwd 列出远端工作站目前所在之目录位置。
ftp> cd dir1 更改远端工作站之工作目录位置至dir1 之下。
ftp> get file1 将远端工作站之文件file1 ,拷贝到本地工作站中。
ftp> put file2 将本地工作站之文件file2 ,拷贝到远端工作站中。
ftp> mget *.c 将远端工作站中,副文件名为c 之所有文件,拷贝到本地工作站中。
ubuntu命令大全
ubuntu命令大全Ubuntu命令大全。
Ubuntu是一个基于Debian的Linux操作系统,是一个开源免费的操作系统。
它具有良好的稳定性、安全性和易用性,因此备受用户喜爱。
作为一个Ubuntu用户,熟练掌握一些基本的命令是非常重要的,可以帮助我们更好地管理系统、提高工作效率。
在本文中,我将为大家整理一份Ubuntu命令大全,希望能够帮助大家更好地使用Ubuntu系统。
1. cd命令。
cd命令是change directory的缩写,用于切换当前工作目录。
例如,要切换到根目录,可以使用以下命令:```shell。
cd /。
```。
要切换到home目录,可以使用以下命令:```shell。
cd ~。
```。
2. ls命令。
ls命令用于列出指定目录中的文件和子目录。
例如,要列出当前目录下的所有文件和子目录,可以使用以下命令:```shell。
```。
要列出指定目录下的文件和子目录,可以使用以下命令:```shell。
ls /path/to/directory。
```。
3. mkdir命令。
mkdir命令用于创建新的目录。
例如,要在当前目录下创建一个名为test的目录,可以使用以下命令:```shell。
mkdir test。
```。
4. rm命令。
rm命令用于删除文件或目录。
要删除文件,可以使用以下命令:```shell。
rm filename。
```。
要删除目录及其下所有文件和子目录,可以使用以下命令:```shell。
rm -r directory。
5. cp命令。
cp命令用于复制文件或目录。
例如,要将文件file1复制到目录directory中,可以使用以下命令:```shell。
cp file1 directory。
```。
要将目录directory1复制到目录directory2中,可以使用以下命令:```shell。
cp -r directory1 directory2。
```。
6. mv命令。
ubuntu14.04下arm-linux-gcc4.5.1的安装与配置
ubuntu14.04下arm-linux-gcc4.5.1的安装与配置
使⽤的是友善之臂mini6410⾃带光盘中的。
1.对新版本arm-linux-gcc-5.4.1进⾏解压(注意,下⾯的C是⼤写的)
tar zxvf arm-linux-gcc-4.5.1-v6-vfp-20101103.tgz -C/
解压完成后,会解压到/opt/FriendlyARM/toolschain/4.5.1/⽬录下。
(不加C的话,应该会解压到软件压缩包同⽂件夹下⾯。
加C,是解压到根⽬录。
)
2.设置环境变量
sudo vim /etc/profile
在最后⼀⾏加:
export PATH=$PATH:/opt/FriendlyARM/toolschain/4.5.1/bin
即将交叉编译⼯具链的路径加⼊。
完成后保存。
3.使⽤命令:source /etc/profile 使环境变量⽣效
4.检查是否将路径加⼊PATH中。
echo $PATH
如果成功的话,会出现刚才设置的变量地址。
5.测试是否成功
在终端⾥输⼊arm-linux-gcc-v,这个命令会显⽰arm-linux-gcc信息和版本,如果出现以下信息则表⽰安装成功
⾄此,安装结束。
(注意,如果上⾯4.5两步不成功的话,重启计算机试⼀下。
)。
ubuntu下建立交叉编译环境
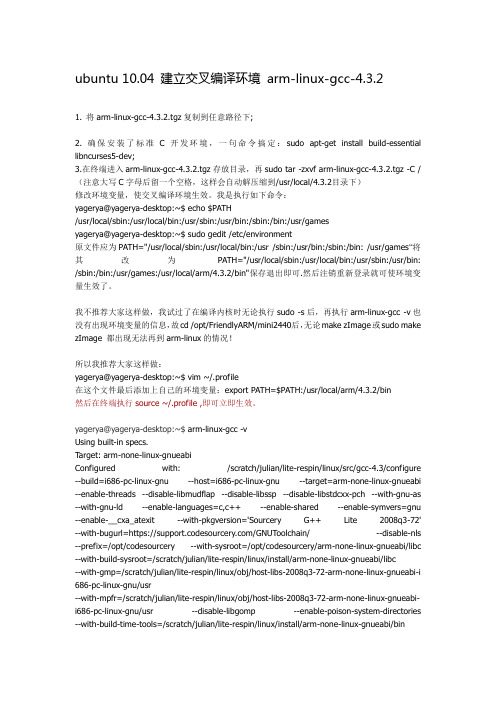
ubuntu 10.04 建立交叉编译环境arm-linux-gcc-4.3.21. 将arm-linux-gcc-4.3.2.tgz复制到任意路径下;2. 确保安装了标准C开发环境,一句命令搞定:sudo apt-get install build-essential libncurses5-dev;3.在终端进入arm-linux-gcc-4.3.2.tgz存放目录,再sudo tar -zxvf arm-linux-gcc-4.3.2.tgz -C /(注意大写C字母后留一个空格,这样会自动解压缩到/usr/local/4.3.2目录下)修改环境变量,使交叉编译环境生效。
我是执行如下命令:yagerya@yagerya-desktop:~$ echo $PATH/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/gamesyagerya@yagerya-desktop:~$ sudo gedit /etc/environment原文件应为PATH="/usr/local/sbin:/usr/local/bin:/usr /sbin:/usr/bin:/sbin:/bin: /usr/games“将其改为PATH="/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin: /sbin:/bin:/usr/games:/usr/local/arm/4.3.2/bin"保存退出即可.然后注销重新登录就可使环境变量生效了。
我不推荐大家这样做,我试过了在编译内核时无论执行sudo -s后,再执行arm-linux-gcc -v也没有出现环境变量的信息,故cd /opt/FriendlyARM/mini2440后,无论make zImage或sudo make zImage 都出现无法再到arm-linux的情况!所以我推荐大家这样做:yagerya@yagerya-desktop:~$ vim ~/.profile在这个文件最后添加上自己的环境变量:export PATH=$PATH:/usr/local/arm/4.3.2/bin然后在终端执行source ~/.profile ,即可立即生效。
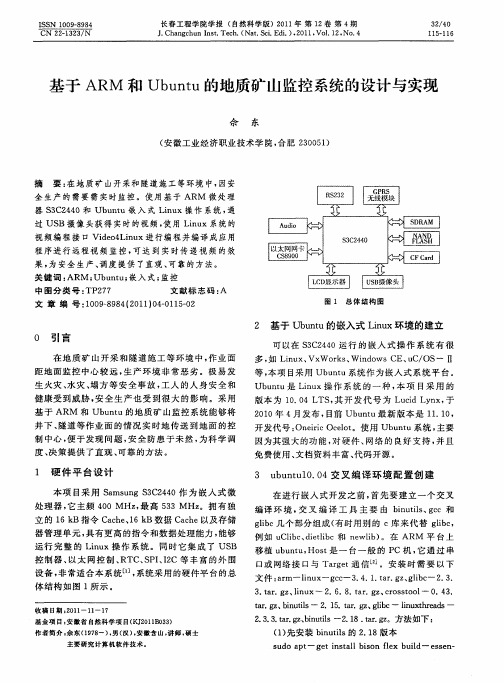
基于ARM和Ubuntu的地质矿山监控系统的设计与实现
l u — g u bn 并 执 行 ¥s u c b s r。 i x n / i, n o re. ah c
() 8 执行 命 令 ¥am—s f la— l u —g u r ot o t i x n — f n
信息 。最后 就是将 这 些 帧信 息 映 射 到 内存 中 , 用 利
函数 : mma ( , d > mb f s e P OT— AD I p 0v 一 u。 i , R z RE
3. a .gz lnux一 2.6 .t r z c o s o l 0 tr 、i .8 a .g 、 r s t o 一 .43 . tr g 、 i u i a . z b n t s一 2 5 a .g 、g ic— l u t r a s一 l .1 .t r z l b i xh ed n
生 火灾 、 水灾 、 方 等 安 全事 故 , 塌 工人 的人 身 安全 和
可 以在 ¥ C 4 0运 行 的嵌 人 式 操 作 系 统 有 很 3 24
多 , L n x Vx ok 、 id wsC u / S一 1 如 iu 、 W r s W n o E、 C o 1
等 , 项 目采用 Ub n u系统 作 为嵌 入式 系 统平 台 。 本 ut
s do a — ge ns a lb s lx bu l u Dt ti t l ion fe id— e s n se —
作 者 简 介 。 东 (9 8 , ( ) 安 徽 含 山 , 师 , 士 余 17 一) 男 汉 , 讲 硕 主要 研 究 计 算 机 软 件 技 术 。
() 改 s 3修 h版本 。 ( ) 压 co so l 0 4 4解 rsto一 . 3源 码 包 , 修 改 配 置 并 文件 。
Ubuntu将支持ARM处理器

ARM还透露,这些要求来自与设备厂商,台湾的ODM厂商将带来完整的软件和硬件解决方案,他们将开发基于arm平台 的netbook。据悉,桌面和 netbook的Ubuntu ARM发行版将于明年四月份发布,将支持基于armv7架构的Cortex-A8和 CortexA9 处理器。
UbuntuARM更改为国内源
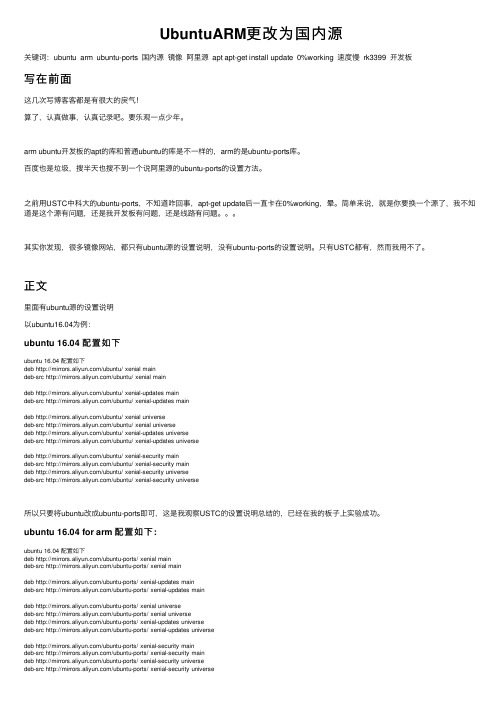
UbuntuARM更改为国内源关键词:ubuntu arm ubuntu-ports 国内源镜像阿⾥源 apt apt-get install update 0%working 速度慢 rk3399 开发板写在前⾯这⼏次写博客客都是有很⼤的戾⽓!算了,认真做事,认真记录吧。
要乐观⼀点少年。
arm ubuntu开发板的apt的库和普通ubuntu的库是不⼀样的,arm的是ubuntu-ports库。
百度也是垃圾,搜半天也搜不到⼀个说阿⾥源的ubuntu-ports的设置⽅法。
之前⽤USTC中科⼤的ubuntu-ports,不知道咋回事,apt-get update后⼀直卡在0%working,晕。
简单来说,就是你要换⼀个源了,我不知道是这个源有问题,还是我开发板有问题,还是线路有问题。
其实你发现,很多镜像⽹站,都只有ubuntu源的设置说明,没有ubuntu-ports的设置说明。
只有USTC都有,然⽽我⽤不了。
正⽂⾥⾯有ubuntu源的设置说明以ubuntu16.04为例:ubuntu 16.04 配置如下ubuntu 16.04 配置如下deb /ubuntu/ xenial maindeb-src /ubuntu/ xenial maindeb /ubuntu/ xenial-updates maindeb-src /ubuntu/ xenial-updates maindeb /ubuntu/ xenial universedeb-src /ubuntu/ xenial universedeb /ubuntu/ xenial-updates universedeb-src /ubuntu/ xenial-updates universedeb /ubuntu/ xenial-security maindeb-src /ubuntu/ xenial-security maindeb /ubuntu/ xenial-security universedeb-src /ubuntu/ xenial-security universe所以只要将ubuntu改成ubuntu-ports即可,这是我观察USTC的设置说明总结的,已经在我的板⼦上实验成功。
ARM架构安装ubuntu系统

ARM架构安装ubuntu系统⼀、简介arm开发板制作系统是⽐较⿇烦,不论使⽤busybox还是yocto制作根⽂件系统对新⼿都⽐太友好,除⾮深度定制,否则使⽤ubuntu系统既可以满⾜,把更多的精⼒放在应⽤开发上。
⼆、准备材料我使⽤的芯⽚是RK3288,⼩伙伴可以根据⾃⼰的情况选择开发版。
开发环境:VMware操作系统:ubuntu开发版:RK3288三、ubuntu的下载与配置1. 下载ubuntu系统ubuntu官⽹根⽂件系统下载地址 ,根据需要下载⾃⼰所需的版本,我使⽤的是ubuntu20.04.2。
打开链接后选择ubuntu-base → releases →版本号→ release → ubuntu-base-20.04.1-base-armhf.tar.gz 下载完成后将ubuntu-base-20.04.1-base-armhf.tar.gz拷贝到ubuntu下,并解压。
mkdir ubuntu20.04.2sudo tar zxf ubuntu-base-20.04.1-base-armhf.tar.gz -C ubuntu20.04.22. 安装qemu-user-static⼯具安装完成后拷贝“/usr/bin/qemu-arm-static”到刚刚解压⽂件的“/usr/bin”路径下。
sudo apt-get install qemu-user-staticsudo cp /usr/bin/qemu-arm-static ubuntu20.04.2/usr/bin/3. ⽹络配置我在上⼀篇⽂章中,介绍在ubuntu20.04.2/etc/apt/sources.list⽂件中更改ubuntu的软件源,不知道为啥这次配置后反⽽下载不了,所以这⾥我就没有配置,各位⼩伙伴视情况⽽定。
为了制作成功的根⽂件系统能够联⽹,可以直接拷贝本机的dns配置⽂件到根⽂件系统的相应位置。
sudo cp /etc/resolv.conf ubuntu20.04.2/etc/resolv.conf4. 使⽤chroot⼯具挂载⽂件系统挂载成功后会进⼊到我们下来的系统中,注意⾥⾯的操作都是对我们挂载的系统进⾏操作的,⽆法在对开发系统进⾏操作,除⾮使⽤exit命令退出。
ubuntu安装arm-none-eabi-gcc的几种方式

ubuntu安装arm-none-eabi-gcc的⼏种⽅式背景这篇⽂章主要是为了解决在 Linux 中编译能够在裸机上跑的程序⽬前许多嵌⼊式软件软件开发在Linux平台下进⾏,编译效率⾼很多,如今天所述的gcc-arm-none-eabi常适⽤于 Arm Cortex-M & Cortex-R processors (Cortex-M0/M0+/M3/M4/M7/M23/M33, Cortex-R4/R5/R7/R8/R52)系列平台。
Ubuntu 16.04之后的软件源是⾃带gcc-arm-none-eabi的,只是⾃动安装后的版本不⼀定符合要求。
常⽤的有三种安装⽅式:基于包管理的⾃动安装sudo apt-get install gcc-arm-none-eabi测试过在不添加其它ppa的情况下,ubuntu16.04和ubuntu18.04都可以⾃动安装,只是默认版本号⾼低不同。
Ubuntu18.04下为gcc version 6.3.1 20170620;ubuntu 16.04下为gcc version 4.9.3 20141119。
查询版本号指令:arm-none-eabi-gcc -v添加新的PPA进⾏安装参考官⽅⽹站,有详细的教程sudo add-apt-repository ppa:team-gcc-arm-embedded/ppasudo apt-get updatesudo apt-get install gcc-arm-embedded安装指定的版本版本下载官⽅⽹站下载源码包后解压,如本机解压到⽬录/usr/lib/gcc添加环境变量vi /etc/profile在⽂件最后添加export PATH=$PATH:/usr/lib/gcc/gcc-arm-none-eabi-4_9-2014q4/bin使能环境变量source /etc/profile此命令只在当前终端有效,若需要在其它终端中使⽤,需要重启计算机。
UbuntuforArm根文件系统制作
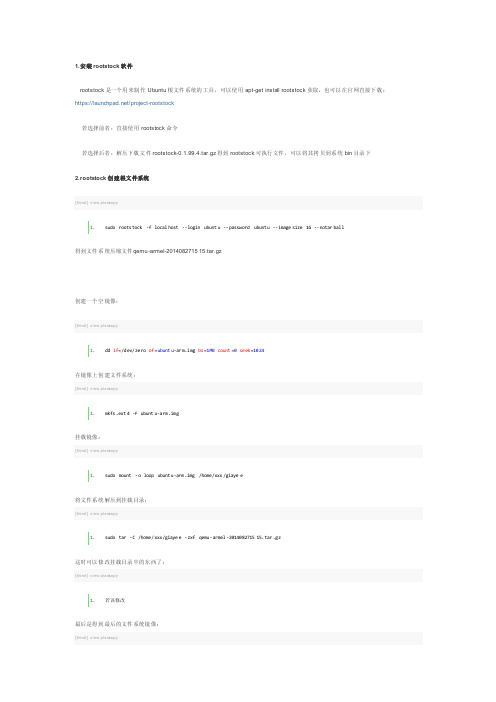
1.安装root stock软件rootst ock是一个用来制作Ubunt u根文件系统的工具,可以使用ap t-get instal l rootst ock获取,也可以在官网直接下载:https://launch /projec t-rootst ock若选择前者:直接使用ro otsto ck命令若选择后者:解压下载文件roots tock-0.1.99.4.tar.gz得到ro otsto ck可执行文件,可以将其拷贝到系统bi n目录下2.rootst ock创建根文件系统[html]view plainc opy得到文件系统压缩文件q emu-armel-201408271515.tar.gz创建一个空镜像:[html]view plainc opy在镜像上创建文件系统:[html]view plainc opy挂载镜像:[html]view plainc opy将文件系统解压到挂载目录:[html]view plainc opy这时可以修改挂载目录中的东西了:[html]view plainc opy最后是得到最后的文件系统镜像:[html]view plainc opy3.模拟器中运行根文件系统下载模拟器q emu:[html]view plainc opy在2中的“若干修改”中执行:[cpp]view plainc opy在仿真环境中访问文件系统[cpp]view plainc opy此时在仿真环境下就可以安装SPI CE了:[cpp]view plainc opy安装完SPICE后保存文件系统:[cpp]view plainc opy。
ubuntu安装arm-none-linux-gnueabi交叉工具链
arm-none-linux-gnueabi交叉工具链与arm-linux-gcc 的区别:参考网友的说法:eabi标准的要好些,可能arm-linux-gcc就是arm-none-linux-gnueabi的一个链接参考网友的一些做法:1 下载arm-2009q1-203-arm-none-linux-gnueabi.bin2 执行./arm-2009q1-203-arm-none-linux-gnueabi.bin在安装的时候选择推荐的路径/opt/arm2009q13 修改环境变量gedit~/.bashrc 在文件最后面添加exportPATH="/opt/arm-2009q1/bin:$PATH"4 修改以后执行 source /.bashrc 使得刚才的设置生效5 测试安装结果输入 arm-none-linux-gnueabi-gcc6 提示NO input file 成功……我参考他的方法,在网上找arm-2009q1-203-arm-none-linux-gnueabi.bin,但是找了N久没有找到,所以没有参考他的方法,看了一些TI网站的资料,为方便自己查阅,也方便网友参考,少走弯路,特此写下我的安装过程和一些心得,如果网友发现错误,敬请指正。
1:下载交叉编译工具链下载链接为:/sgpp/lite/arm/portal/release858下载linux/GNU的就可以了,下载下来名字为:arm-2009q1-203-arm-none-linux-gnueabi-i686-pc-linux-gnu.tar.bz2下面要使用这个文件安装另外说明我是使用的root权限,#sudo -i 切换到root权限下。
默认是安装在/opt目录下的,一般的Ubuntu安装完成之后都会在根目录下有一个opt目录,如果没有就创建一个新的目录# mkdir -p /opt2:解压源文件参考TI的安装,安装路径为/opt目录,解压源文件到/opt目录下。
Ubuntu18.04安装arm-linux-gcc交叉编译器的两种方法(附下载地址)

Ubuntu18.04安装arm-linux-gcc交叉编译器的两种⽅法(附下载地址)⽅法⼀: 我们都知道Ubuntu有⼀个专门⽤来安装软件的⼯具apt,我们可以⽤它来全⾃动安装arm-linux-gcc。
此⽅法安装的是最新版的,但是此⽅法需要FQ,否则99%会失败,这就是为什么⽹上⼤多都⽤压缩包安装的原因: ⾸先Ctrl+Alt+T弹出终端,使⽤如下命令进⾏arm-linux-gcc的安装:sudo apt-get install gcc-arm-linux-gnueabihf 使⽤如下命令进⾏arm-linux-g++的安装:sudo apt-get install g++-arm-linux-gnueabihf 如果要卸载时使⽤如下命令进⾏移除,arm-linux-gcc的卸载:sudo apt-get remove gcc-arm-linux-gnueabihf arm-linux-g++的卸载:sudo apt-get remove g++-arm-linux-gnueabihfsudo tar -xjvf /tmp/arm-linux-gcc-3.4.5-glibc-2.3.6.tar.bz2 3.解压完成后,再在(/usr/local)中创建⼀个新⽬录arm,即在Terminal中输⼊以下命令:sudo mkdir /usr/local/arm 4.创建arm⽬录成功后,还需要给它解放全部权限,即在Terminal中输⼊以下命令:sudo chmod 777 /usr/local/arm 5.在解压出来的⽬录中找到并把整个arm-linux-gcc-3.4.5-glibc-2.3.6⽬录复制到刚刚建好的arm⽬录中,命令如下:sudo cp -r gcc-3.4.5-glibc-2.3.6 /usr/local/arm 6.打开(/etc/profile)配置环境变量和库变量,⽬的是以后可以在任何位置使⽤该交叉编译器,命令如下:sudo vi /etc/profile 7.⽤vi或者vim打开后,在⽂件最后添加两⾏,并输⼊以下代码:第⼀⾏是添加执⾏程序的环境变量,第⼆⾏是库⽂件的路径export PATH=$PATH:/usr/local/arm/gcc-3.4.5-glibc-2.3.6/binexport LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/arm/gcc-3.4.5-glibc-2.3.6/lib 8.使⽤source命令重新加载⽣效该配置⽂件source /etc/profile 9.检验是否安装成功,在 Terminal 输⼊以下命令输出版本信息:arm-linux-gcc -v 10.若有以下报错参考解决办法: 报错:bash: /usr/local/arm/4.2.2-eabi/usr/bin/arm-linux-gcc-4.2.2: No such file or directory 解决sudo apt-get install libc6-i386 该库中包括ia32-libs, lib32z1, lib32ncurses5等等依赖。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
So, this was quite a bit more lengthy than I hoped. Nevertheless, I think this is worth sharing. I made all this with my old trusty net book and the BBB connected via HDMI to an external monitor (theoretically, you could create a script to set up everything for you, but I don't know how to do that... yet), and coupled with its own keyboard and mouse the first time, then I realized I could have used SSH from the very beginning (how dull of me) controlling the BBB with my computer. You will also need a fast micro sd card, 4 GB at the very least (and 32 GB at most, I strongly recommend at least 8 gb, class 10) to set up Ubuntu ARM. To install things, an internet connection is required. You could use an Ethernet cable, but personally I had access to a USB-Stick Wireless Network Adapter by CISCO/Linksys that worked right away.In short, make sure you have the following:If you are going to use SSH:4 GB (or more, I recommend 8gb class 10) SD card (and the sd card reader for the imaging in your PC with Ubuntu)Ethernet Cable (or Wifi USB adapter) and internet connectionPlenty of time and patience (time being the most important, I warn you)If you want graphical output from the BBB, to control it "directly", add:Micro HDMI cable (and the HDMI Monitor or TV, of course)USB Hub (connected to the BBB)Keyboard (in the hub)Mouse (If you wish to use the graphical environment right away. I used a wireless one without problem, connect it to the hub)So, lets begin with this. There is an alternative way to install ROS, using Angstrom, covered by Victor Mayoral Vilches (don't know him), on his blog: / . I have not tried it, but will do sometime.1.- Prepare the sd card for imagingModified from /BeagleBoardUbuntuUsing: "Method 1: Download a Complete Pre-Configured Image", download a premade image of Quantal 12.10 armhf. 12.10 being important, as it is the latest Ubuntu version supported by ROS.In my case, I extracted the files for ubuntu-12.10-console-armhf-2013-07-22. Be careful when imaging the card, you must be absolutely sure that the sdX you are using is the RIGHT one (or risk trashing your computer data). Position yourself via the terminal inside the folder of the extracted premade image and enter:sudo ./setup_sdcard.sh --probe-mmcThis showed me that my sd card was in sdb, then, I used:sudo ./setup_sdcard.sh --mmc /dev/sdb --uboot bone_dtbWhen finished, just put the SD card in the slot of the BBB, and power it on with the USB Cable and your PC. The default user is ubuntu and the pass is temppwd2.- Configure SSHIf for some reason you need special configuration, do:On the BBB, enter in the terminal or command line:sudo nano /etc/ssh/sshd_configAnd follow the instructions of the Configuration section of https:///12.04/serverguide/openssh-server.html but LEAVE the port as 22. Then do:sudo /etc/init.d/ssh restartIf you do not need special configuration, just do:On your PC, go to /Getting%20Started and look for mkudevrule.sh . Download it, make the file executable and run it with sudo. See /questions/77929/how-to-run-a-script if needed, and then reboot.Make sure you are connected to the network created by the BBB via the USB cable, in my case, it's named "Wired connection 2" and appears as an Ethernet Network (Circuitco BeagleBoneBlack). You could set up the network manually if needed, like in/2013/05/11/remote-desktop-connection-to -a-raspberry-pi/ but I found it unnecessary (also, don't follow the instructions in that link, it's for the RaspberryPi and Fedora).If succesful, you should be able to do:ping 192.168.7.1ping 192.168.7.2And get a response from the BBB. On your PC, update the /etc/hosts (sudo nano bla bla bla) file, adding the line:192.168.7.2 armto the list of known hosts. You should have the SSH server and client installed already, if in doubt, see https:///12.04/serverguide/openssh-server.html . Thus, you could now do:ping armOn your PC (you may need to reboot it again, I don't really remember), enter in a terminal:sudo ufw allow 22ssh ubuntu@armI'm not sure if the first line is really neccesary, seen in /questions/51925/how-do-i-configure-a-new-ubuntu-installatio n-to-accept-ssh-connections .Then enter the pass temppwd, and you will be connected via SSH to the BBB, via the USB cable. If worried about security, see https:///community/SSH/OpenSSH/Configuring .3.- Configure the wifi adapter (if not using ethernet)If you don't mind, you can connect to the BBB via SSH right away, and do everything on your computer, see step 1 if you need to configure the SSH connection from the BBB itself. I suggest using SSH so you don't have to bother with HDMI, keyboard, etc. You need to set up the hosts file on your computer so it includes the BBB ip and name key-value pair, and "install" the driver script from the BBB webpage.The BBB will ask you for a login, enter ubuntu (the user) and the the password temppwd. You are now at ubuntu@arm. In the section named "Ubuntu Software" at /BeagleBoardUbuntu there is an example of the interface configuration file (see /showthread.php?t=202834 for more detail). I used:sudo nano /etc/network/interfacesIn my case, I had a WPA-2 public ssid AES encrypted personal DHCP network, thus after the Wifi Example comments I entered:auto wlan0iface wlan0 inet dhcpwpa-driver wextwpa-ssid INFINITUM1234wpa-ap-scan 1wpa-proto RSNwpa-pairwise CCMPwpa-group CCMPwpa-key-mgmt WPA-PSKwpa-psk ...Again, see /showthread.php?t=202834 for more details. INFINITUM1234 being the name of my wireless network. To get the pass phrase, exit nano (saving changes) and enter in the terminal:wpa_passphrase your_essid your_ascii_keyLets say (as an example) that I used:wpa_passphrase INFINITUM1234 1234567890Write down (if not using SSH, sorry for that... but you could just use SSH, or Ethernet you know, or finish this later with a GUI) the long string of letters and numbers generated after psk, and update the wpa-psk line in /etc/network/interfaces with the string. Finally, reboot:sudo reboot4.- Configure the keyboard layout (if yours is not US standard and you are using the BBB "directly")I used a Spanish (Spain) keyboard. To configure it, follow the instructions at /questions/155424/changing-keyboard-layout-in-ubuntu-12-04-s erver-command-line-interfacesudo apt-get updatesudo apt-get install console-dataHit enter when showed "Configuring console-data", and then use:sudo dpkg-reconfigure keyboard-configurationSelect an appropriate keyboard and the desired language. Leave other optionsunchanged.5.- Start the Graphical Environment (if so you wish)Same user as ubuntu and pass as temppwd. Refer to /BeagleBoardUbuntu under the subsection "Raring 13.04 armhf". Position yourself inside /boot/uboot/tools/ubuntu/ (not really really needed) and run the script small-lxde-desktop.sh with sudo:cd /boot/uboot/tools/ubuntu/sudo ./small-lxde-desktop.shWill take a while, around 30 minutes for me. Then reboot. Use again ubuntu as user and temppwd as password. For some reason the mouse will be "hidden" even thought it's still there. You can access a terminal in Start/System_Tools/XTermIf you want Lubuntu (the core part, install apps later), you will need an 8gb card or bigger, use:sudo apt-get updatesudo apt-get install lubuntu-coreThis will take 1-2 hours to finish.6.- Configure TightVNCI used Vinagre (Remote Desktop Viewer) on my laptop with Ubuntu 13.04. I installed it via the software center.We will use a variation of /2013/01/13/remote-server-access-lxde-vnc/ . On the BBB (either directly on it or via SSH, I prefer SSH), enter in a terminal or command line:sudo apt-get updatesudo apt-get install aptitudesudo aptitude install tightvncservertightvncserver :1I (maybe foolishly, but whatever) put temppwd as the password for VNC too. Do not create a view-only password. Then, on the BBB:tightvncserver -kill :1nano ~/.vnc/xstartupAnd add this line at the end of the file if using small LXDE:lxterminal & /usr/bin/lxsession -s LXDE &If using Lubuntu, erase the line /etc/X11/Xsession, and add:/usr/bin/startlubuntu &Again, on the BBB:tightvncserver :1Start the remote desktop viewer, and connect via VNC to 192.168.7.2:1, enter the pass temppwd, and you will get the remote desktop. You can change the resolution, on the BBB:tightvncserver -kill :1tightvncserver :1 -geometry 800x600 -depth 16 -pixelformat rgb565:And connect again with Remote Desktop Viewer. That's all for the basics. As you may see, the theme does not behaves well right now, don't know how to fix it, but it seems perfectly usable, if bare bones. Personally, I think that you should use the VNC as a last resort, as it's heavy and resource consuming. Kill the server when finished:tightvncserver -kill :1To run the VNC at the BBB startup with small LXDE, do on the BBB:sudo nano /etc/init.d/tightvncserverAnd copy and paste (taken from /2013/01/13/remote-server-access-lxde-vnc/ ):#!/bin/sh### BEGIN INIT INFO# Provides: tightvncserver# Required-Start: $local_fs# Required-Stop: $local_fs# Default-Start: 2 3 4 5# Default-Stop: 0 1 6# Short-Description: Start/stop tightvncserver### END INIT INFO# More details see:# /linux/tightvnc### Customize this entry# Set the USER variable to the name of the user to start tightvncserver under export USER='root'### End customization requiredeval cd ~$USERcase "$1" instart)su $USER -c '/usr/bin/tightvncserver :1'echo "Starting TightVNC server for $USER ";;stop)pkill Xtightvncecho "Tightvncserver stopped";;*)echo "Usage: /etc/init.d/tightvncserver {start|stop}"exit 1;;esacexit 0Remember to change the USER key value (export USER='root'). I have not tested any of this, so be careful. If this is done wrong, you may need to erase /etc/init.d/tightvncserver via SSH or directly from the card using your PC. Then run on the BBB:sudo chmod 775 /etc/init.d/tighvncserversudo update-rc.d tightvncserver defaultsAnd finally reboot. Again, a word of caution, as I have not tested this myself and if done wrong may be tedious to fix.7.- AdditionalsThe BBB can be accessed via SSH without HDMI output right away. If LXDE was installed, it's convenient to be able to select whether or not the GUI is automatically started.To disable the slim login "thing" in LXDE (do it anyway, really), enter in the BBB:sudo update-rc.d -f slim removeAnd reboot (seen in /2009/01/disable-service-startup-in-ubuntu/ ). You can re enable it (in the BBB, via SSH) if you wish, by doing:sudo update-rc.d slim defaultsThis way, you can stop using the HDMI output, and start the SSH session from your PC directly. If you were to use the HDMI output, you would see a simple command line. You can use SSH either way.To start the VNC session, simple enter via SSH:tightvncserver :1 -geometry 800x600 -depth 16 -pixelformat rgb565:And then connect via the Remote Desktop Viewer. Finish the VNC session in the RDV, and then use via SSH:tightvncserver -kill :1You can monitor resource usage in the BBB via SSH with:sudo ps auxThe LXDE session for VNC consumes around 7% of RAM space while idle.8.- Installing ROSWe will have to install from source, as in /wiki/groovy/Installation/Source , but with some modifications to the process. This WILL take a lot of time, at least 4-5 hours, if not more.On the BBB (I used SSH), enter:sudo sh -c 'echo "deb /ros/ubuntu quantal main" > /etc/apt/sources.list.d/ros-latest.list'wget /ros.key -O - | sudo apt-key add -sudo apt-get updateThen, on the BBB:sudo apt-get install python-rosdep python-rosinstall-generator python-wstool build-essentialsudo rosdep initrosdep updateThen, on the BBB (note that the last line is different from the ROS wiki version):mkdir ~/ros_catkin_wscd ~/ros_catkin_wsrosinstall_generator ros_comm --rosdistro groovy --deps --wet-only > groovy-ros_comm-wet.rosinstallwstool init -j1 src groovy-ros_comm-wet.rosinstallTo resolve dependencies, use:rosdep install --from-paths src --ignore-src --rosdistro groovy -yAfter around 1 hour, an error will occur, install sbcl-source and sbcl-doc, then retry 2 times.sudo apt-get install sbcl-source sbcl-docrosdep install --from-paths src --ignore-src --rosdistro groovy -yrosdep install --from-paths src --ignore-src --rosdistro groovy -yInstall liblog4cxx10 (if dependencies were resolved correctly, this is unneeded):sudo apt-get install liblog4cxx10 liblog4cxx10-devBuild the workspace:./src/catkin/bin/catkin_make_isolated --installThis is going to take around 2 hours. Finally:source ~/ros_catkin_ws/install_isolated/setup.bashAnd enter via SSH:export LC_ALL=CThis line should be added to the .bashrc file, to be executed by default in all terminals (I could avoid this fix, after installing a ton of senseless packages and messing around, impossible to say how now, though I think that maybe it was updating the build tools, gcc, and the like)The end of my .bashrc looks like (my workspace is ~/catkin_ws, see the ros wiki tutorials):# ROS stuffexport LC_ALL=Cexport ROS_HOSTNAME=armexport ROS_MASTER_URI=http://arm:11311source ~/ros_catkin_ws/install_isolated/setup.bashsource ~/catkin_ws/devel/setup.bashsource ~/catkin_ws/install/setup.bash9.- Test itOn the BBB, try:ssh ubuntu@armroscore10.- Other problems I had* DNS Issues (wifi adapater works fine but system cannot resolve for ip addresses), just do:sudo rm /etc/resolv.confsudo dpkg-reconfigure resolvconfMy resolv.conf looks like:# Dynamic resolv.conf(5) file for glibc resolver(3) generated by resolvconf(8)# DO NOT EDIT THIS FILE BY HAND -- YOUR CHANGES WILL BE OVERWRITTENnameserver 1.1.1.1domain localdomainsearch localdomainnameserver 192.168.1.1The problem seems to be the first nameserver line. The ip above should be different for you, and you could simply add the google DNS addresses (8.8.8.8 and 8.8.4.4).Then reboot.See:/questions/142327/can-not-access-internet-dns-names-do-n ot-resolve-after-update-today/questions/292622/cannot-resolve-dns-on-12-10-install* The icon theme on the VNC session with LXDE seems missing:No idea why, share if you know any fix. Maybe install Lubuntu, seems to work finewith VNC.* roscore fails to start, cannot ping ubuntuSeems that a dirty fix is to simply add:192.168.7.2 ubuntuTo /etc/hosts hosts list (with sudo nano ...). I don't really know what's going on, if you have this problem and you know a better fix, please share.My hosts file looks like:127.0.0.1 localhost127.0.1.1 arm192.168.7.2 ubuntu* SSH is rejectedDon't know why, sometimes all I need is to reboot, another time I just redid the steps for configuring SSH.* Cannot recognize USB device (fails to power)Seems like a driver/hardware bug, reboot.11.- Compiling and installing open-cvModified from: /raspberry-pi-opencv/Position yourself in a workspace folder (if you wish), then:wget/projects/opencvlibrary/files/opencv-unix/2.4.3/OpenCV-2.4 .3.tar.bz2tar –xvf OpenCV-2.4.3.tar.bz2sudo apt-get updatesudo apt-get -y install build-essential cmake cmake-qt-gui pkg-config libpng12-0 libpng12-dev libpng++-dev libpng3 libpnglite-dev zlib1g-dbg zlib1g zlib1g-dev pngtools libtiff4-dev libtiff4 libtiffxx0c2 libtiff-tools sudo apt-get -y install libjpeg8 libjpeg8-dev libjpeg8-dbg libjpeg-progs ffmpeg libavcodec-dev libavcodec53 libavformat53 libavformat-dev libgstreamer0.10-0-dbg libgstreamer0.10-0 libgstreamer0.10-dev libxine1-ffmpeg libxine-dev libxine1-bin libunicap2 libunicap2-dev libdc1394-22-dev libdc1394-22libdc1394-utils swig libv4l-0 libv4l-dev python-numpy libpython2.7 python-dev python2.7-dev libgtk2.0-dev pkg-configcd OpenCV-2.4.3mkdir buildcd buildcmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D BUILD_PYTHON_SUPPORT=ON -D BUILD_EXAMPLES=ON ..Compiling and installing will take a LONG time (+5 hours):makesudo make installConfigure with:sudo nano /etc/ld.so.conf.d/opencv.confAnd add the line at the end of file:/usr/local/libThen:sudo ldconfigsudo nano /etc/bash.bashrcAnd add at the end of file:PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfigexport PKG_CONFIG_PATHReboot, and finally:sudo apt-get upgradeEXTRA.- Make a backup image of your sd cardJust in case something goes terribly wrong and you need to restore the sd card to a previously working state. See/questions/299081/how-do-i-create-a-backup-image-of-an-sd-ca rd/questions/119211/how-to-write-image-to-sd-cardSHAR INTERNET CONNECTION VIA SSH/USBCOMPILE OPENCVCREAT BLOG AND UPLOADUPDATE SERVO INFOTEST ROSSERIAL ARDUINO BBB pyserial? FIX ICON THEME lubuntu?MAKE NEW PCB AND RESEND OLD ONE。