详解CAN总线几种正常的“异常”波形
CAN总线错误帧长得啥样?怎么产生?

CAN总线错误帧长得啥样?怎么产生?
前两天,帮一个客户调试CAN总线,他的板子发数,USBCAN接收,但是总是调试不成。
我接上示波器,量一下CANH与CANL之间的波形,发现
他板子不连接USBCAN接口卡时,波形是正确的;可是一旦连接上USBCAN 以后,波形就成了以下这个样子:
就是刚发了第一个显性位之后,就有个阶梯的电压下降,然后保持几个位后,恢复到隐性电平,过了一会,才有正常的波形出来,可是这个帧只剩下一半了,肯定不可能发送成功。
我开始以为是收发器不匹配,换了几个收发器都是一样的。
突然我想到这个很像错误帧。
既然有错误帧,那就说明可能波特率不对。
仔细看了程序,发现波特率是12M下算出来的,而晶振却用了16M。
立马调整波特率,OK。
通讯成功。
那个阶梯的波形也没有了。
所以可以肯定,那就是一个错误帧。
但为什么有个阶梯呢?答案很简单,因为CAN通讯的两个节点的收发器的电源不同,比如,发送节点的电压稍微高点,那么其CANH被拉高时电压也高,故显性位输出时,差分电压也高。
所以当发送节点发送的显性位被接收节点接收后,接收节点发现波特率不匹配,则马上发出错误帧(6个位的显性电平),但是接收节点电压稍微低,故差分电压也小一点,所以产生了一个阶梯。
下面为错误帧的定义:
错误帧是节点收到信息,被认为错误时,而向总线广播的一种帧。
比如前面这个错误帧的作用就是:接收节点通知发送节点:你的发送有主动错误,你的发送错误计数器要加8;同时接收节点的接收错误计数器要加1。
基础培训CAN总线故障波形
1
H
L
H 2 L + 12 V
报文
H 3 L
售后服务培训
工作表 13 – 低速CAN-Low 正极短路
CAN 连接
1
H
L
H 2 L + 12 V
报文
H 3 L
售后服务培训
工作表 14 – 低速CAN-High 接地短路
CAN 连接
1
H
L
H 2 L
报文
H 3 L
售后服务培训
工作表 15 – 低速CAN-Low 接地短路
售后服务培训
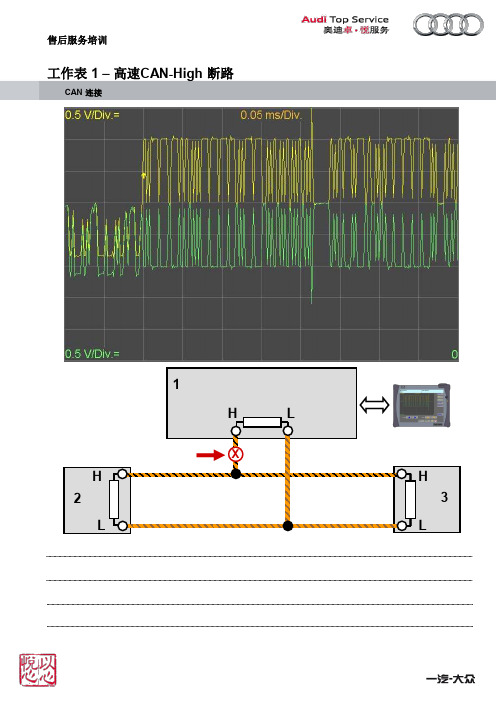
工作表 1 – 高速CAN-High 断路
CAN 连接
1
H
X
L
H 2 L
H
3 L
售后服务培训
工作表 2 –高速CAN-Low 断路
CAN 连接
1 H L
X
H 2 L
H 3 L
售后服务培训
工作表 3 –高速CAN-High 和 CAN-Low 错误连接
CAN 连接
1 H L
H
H 3
2
L L
1
H
X
L
H 2 L
报文
H 3 L
售后服务培训
工作表 10 – 低速CAN-Low 断路
CAN 连接
1 H L
X
H 2
报文
H – 低速CAN-High 和 CAN-Low 错误连接
CAN 连接
1
H
L
H 2 L
报文
H 3 L
售后服务培训
工作表 12 – 低速CAN-High 正极短路
售后服务培训
工作表 4 –高速CAN-High 正极短路
汽车CAN高速网故障特征波形分析
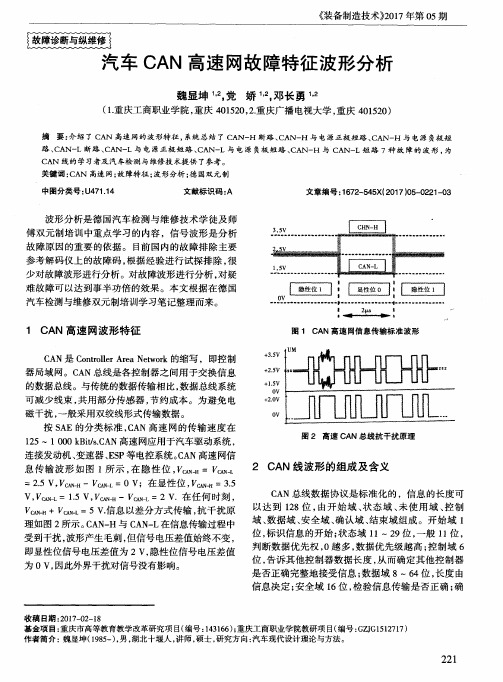
l , c A N _ H + c A N - I J =5 V . 信息 以差分方式传输 , 抗干扰原
数据域 、 安全域 、 确认域 、 结束域组成 。开始域 1 理如图 2 所示。 C A N — H与 C A N — L 在信息传输过程中 域 、 标识信息的开始 ; 状态域 1 1 2 9 位, 一般 1 1 位, 受到干扰 , 波形产生毛刺 , 但信号电压差值始终不变 , 位, 判断数据优先权 , 0 越多 , 数据优先级越高 ; 控制域 6 即显性位信号电压差值为 2 V , 隐性位信号 电压差值 位, 告诉其他控制器数据长度 , 从而确定其他控制器 为0 V , 因此外界干扰对信号没有影响。 是否正确完整地接受信息 ; 数据域 8~6 4 位, 长度 由 信息决定 ; 安全域 l 6 位, 检验信息传输是否正确 ; 确
பைடு நூலகம்
波形分析是德 国汽车检测与维修技术学 徒及师 傅双元制培训 中重点学 习的内容 ,信号波形是分析 故障原 因的重要的依据 。 目 前 国内的故障排 除主要 参考解码仪上 的故障码 , 根据经验进行试探排 除 , 很 少对故障波形进行分析 。对故障波形进行分析 , 对疑 难故障可以达到事半功倍的效果。本文根据在德 国 汽车检测与维修双元制培训学习笔记整理而来。
《 装备制造技术1 2 0 1 7 年第 0 5 期
受
汽车 C A N高速 网故 障特征 波形分析
魏显坤 1 . 2 , 党 娇 1 I 2 , 邓长勇 1 , 2
( 1 . 重庆工商职业学院 , 重庆 4 0 1 5 2 0 , 2 . 重庆广播电视大学 , 重庆 4 0 1 5 2 0 )
详解CAN总线几种正常的“异常”波形
详解CAN总线几种正常的“异常”波形工程师们通常使用示波器观察CAN 总线的信号质量,一般主要关注CAN 总线差分信号的幅值、最小位宽、边沿情况等。
相信不少工程师都看到过一条报文数据的波形上高高低低存在多个幅值,心里可能会变得忐忑不安,幅值不统一是不是波形出现畸变了呢?其实并非如此,今天就把CAN 总线上的幅值异常归归类。
一、CAN-bus 信号产生原理众所周知,一个标准CAN 节点由微处理器、控制器、收发器构成。
多个节点成总线型架构挂在一起,两个端节点上并有终端电阻。
其结构简图如下图所示。
图1 CAN-bus 节点网络结构可以看出,与总线直接相连的是CAN 节点的收发器,起内部电路等效如下图所示,CAN-H、CAN-L 直接由三极管驱动,近似可以看成电流型输出。
结合上文所述网络架构中的终端电阻,节点发出信号时电流流过终端电阻产生电压信号,当同一时间多个节点同时发出信号时就会使总线上的电流高于单一节点发出的电流,使得我们观察电压信号时出现突增的现象。
图2 CAN 收发器结构CAN-bus 是总线型结构,通常状态下一般只有一个节点占有总线。
那么有几种情况会导致多个节点同时发出,进而导致幅值出现异常呢,下文通过致远电子CANScope 分析仪的几个测试案例总结一下。
二、应答位上的幅值异常最常见的,当CAN 网络上存在3 个以上的节点时,应答位上的幅值要明显高于同一报文的其他位置,如下图所示。
可以看到报文在ID 段、数据段、CRC 校验段处的幅值均比较一致,但是到应答位处时幅值出现突增。
这是为什么呢,大家都知道CAN-bus 总线拥有自动应答机制,即当某一节点发送完一帧报文时,所有总线中的其余非只听节点均会在应答位处做出响应,如果报文被成功识别则发出一个显性位做为应答信号。
结合上文所述,应答位此时CAN 总线上的电流是若干节点电流叠加的综合,所以应答位的幅值高就很容易讲通了。
图3 应答位上的幅值异常三、ID 段上的幅值异常CAN-bus 总线的一大特点就是多主结构,即网络中所有节点功能对等,没有主从机的概念,所有节点均可自由收发数据。
浅析CAN数据总线常见故障的波形检测方法
浅析CAN数据总线常见故障的波形检测方法作者:蒋浩群来源:《科技风》2018年第06期摘要:在汽车车身系统中,每个控制单元都是通过总线相互连接的。
车载网络的信号都是通过电信号传输的。
在具体的工作中,会出现断路、短路、线路装混等问题。
采用波形检测方法一步步去分析,最终排除故障,保证车载网络的正常运行。
关键词:断路;短路;线路装混;通信中断;电信号汽车电控系统中,各系统之间需要多个传感器提供信号,在各控制单元中需要实时交换。
如果在这种情况下,车身每个系统的电控单元(ECU)之间不适合采用传统的点到点连接方式,汽车车身系统的每个电控单元之间可以通过总线(CAN数据总线)互相连接。
车载网络的信息通过电信号传输。
在具体的传输工作过程中常会出现下列几类故障,我们一一来分析。
一、故障一:CAN数据总线的导线断路(CAN-Low)故障显示:发动机控制单元CAN-Low线断路,如图1所示。
这个故障的一个重要特征就是CAN-Low通道出现高于2.5V的电压,在正常工况是没有这个电压的。
这个信号无法通过正常的触发调节显示出来,因为这种故障不是会经常出现的,所以也就无法保证肯定会显示在屏幕上,于是就利用CAN-Low线在正常工况时电压不超过2.5V进行触发。
在触发电平为3V时,触发器被调到通道B,如果CAN-Low线出现断路,那么这条线上的电压有时会超过2.5V。
故障查询的其他方法:(1)按下相应控制单元的插头,检查触电是否弯曲。
(2)再次插上插头,查询故障存储器。
(3)如果还是显示有故障,就再次拔下通信有故障的控制单元插头;查看电路图,将与有故障的控制单元直接相连的控制单元插头拔下;对于CAN-Low线来说,检查插头内针脚之间的连接是否断路。
注意:如果CAN-High线断路,相应地就得先进行CAN-High线的检查。
这时DSO上的故障图像就向下翻转并在低于2.5V的区域触发器应调到通道A(1.7V)。
二、故障二:CAN-Low线对蓄电池短路故障描述:CAN-Low线的故障在于蓄电池电压,如图2所示。
【干货】手把手教你CAN总线的8种常见故障与排除方法
【干货】手把手教你CAN总线的8种常见故障与排除方法当CAN总线出现故障或数据传输异常时,往往会出现多种奇怪的故障现象,如仪表板显示异常,车辆无法启动,启动后无法熄灭,车辆动力性能下降,某些电控系统功能失等。
这是因为相关数据或信息是通过CAN总线传输的,如果传输失败,那么会产生多种连带故障,甚至造成整个网络系统瘫痪。
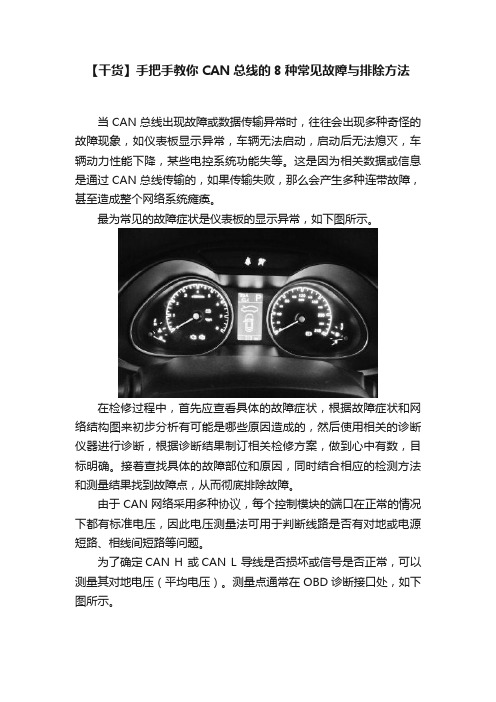
最为常见的故障症状是仪表板的显示异常,如下图所示。
在检修过程中,首先应查看具体的故障症状,根据故障症状和网络结构图来初步分析有可能是哪些原因造成的,然后使用相关的诊断仪器进行诊断,根据诊断结果制订相关检修方案,做到心中有数,目标明确。
接着查找具体的故障部位和原因,同时结合相应的检测方法和测量结果找到故障点,从而彻底排除故障。
由于CAN网络采用多种协议,每个控制模块的端口在正常的情况下都有标准电压,因此电压测量法可用于判断线路是否有对地或电源短路、相线间短路等问题。
为了确定CAN H 或CAN L 导线是否损坏或信号是否正常,可以测量其对地电压(平均电压)。
测量点通常在OBD诊断接口处,如下图所示。
诊断接口的6号针脚连接CAN H 导线,14号针脚连接CAN L 导线。
如果诊断接口上连接有两组CAN总线,那么动力CAN总线使用6号和14号针脚,舒适总线使用3号和11号针脚。
诊断接口的针脚含义如下图所示。
正常情况下,当CAN总线唤醒后,CAN H 对地电压约为2.656V,CAN L 对地电压约为2.319V,而且两者相加为4.975V ▼正常的CAN H 电压正常的CAN L 电压CAN故障通常的原因有CAN线短路、对电源短路、对地短路、相互接反。
1. CAN H 与CAN L 短路当CAN H 与CAN L 短路时,CAN网络会关闭,无法再进行通信。
会有相应的网络故障码。
CAN H 与CAN L 短路的总线波形如下图所示。
当两者相互短路之后,CAN电压电位置于隐性电压值(约2.5V)。
舒适CAN故障波形图
CAN高线与CAN低线电压电位相同,零坐标重叠。 影响所有的舒适总线,舒适系统CAN总线变为单 线工作
CAN高线断路
CAN低线的电压电平正常,在CAN高线上为0V隐形电压电位和1位 长的5V显性电压电位
CAN低线断路
CAN高线的电压电平正常,在CAN低线上为5V隐ຫໍສະໝຸດ 电压电位 和1位长的1V显性电压电位
舒适CAN故障波形图
CAN-H高位线对搭铁短路
CAN高线的电压置于0V,CAN低线的电压电位正常,当高线对 搭铁短路时,所有舒适系统CAN总线均变成单线工作。
CAN高位对正极短路
CAN高线的电压约为12V(蓄电池电压),CAN低线电 压电平正常。舒适系统变成单线工作
CAN高线与CAN低线之间短路
can总线canh与canl波形

一、概述CAN总线作为一种广泛应用于汽车、工业控制和航空航天等领域的通信协议,其稳定可靠的通信性能备受关注。
在CAN总线通信中,CANH和CANL波形是非常重要的参数,它们直接影响着通信的稳定性和可靠性。
本文将就CANH和CANL波形的特点、调试方法和常见问题进行介绍。
二、CANH和CANL波形的特点1. CANH和CANL波形的电气特性CANH和CANL分别代表CAN总线的高电平和低电平信号,它们的电压范围为0~5V(在某些特定应用中也有0~3.3V的电压范围)。
CANH和CANL波形的特点包括电平高低、上升沿和下降沿的斜率等。
2. CANH和CANL波形的时序特性在CAN总线的通信中,CANH和CANL波形需要严格遵循CAN2.0B协议规范,包括在指定的时钟周期内完成上升沿和下降沿的传输,以及满足错误帧、过载帧等特殊情况下的波形规范要求。
三、CANH和CANL波形的调试方法1. 使用示波器观察波形通过示波器可以直观地观察CANH和CANL波形的电平、时序等特性,可以帮助工程师快速定位通信问题。
2. CAN分析仪的应用CAN分析仪是一种专门用于CAN总线通信调试的仪器,它可以实时捕获和分析CANH和CANL波形,帮助工程师定位通信故障。
3. 结合软件工具进行分析结合CAN分析软件、示波器分析软件等工具,可以更深入地对CANH和CANL波形进行分析和处理。
四、常见的CANH和CANL波形问题1. 波形电平不稳定当CANH和CANL波形的电平发生剧烈波动时,可能会导致通信错误,需要及时分析原因并进行处理。
2. 波形上升沿和下降沿不符合规范CAN总线通信要求上升沿和下降沿的斜率和时间满足严格的规范要求,如果波形不符合规范,可能会导致通信问题。
3. 波形出现毛刺和干扰在复杂的电磁环境中,CANH和CANL波形可能会受到外部干扰,导致波形不稳定和出现毛刺。
五、总结通过对CANH和CANL波形的特点、调试方法和常见问题进行全面了解,可以帮助工程师更好地进行CAN总线通信调试和故障处理工作。
驱动CAN错误波形

通过对错误波形的特征和识别方法的学习和掌握,可以更有效地进行CAN通信的故障排 查和维修。
提高CAN通信的可靠性和稳定性
通过对错误波形的分析和处理,可以及时发现并解决CAN通信中的问题,从而提高通信 的可靠性和稳定性。
汇报范围
CAN通信基本原理和协议
常见错误类型及其产生原因
02 03
报文传输
CAN总线上的通信以报文为单位进行传输,每个报文包含 了发送节点的标识符、数据长度、数据字段以及校验和等 信息。报文的传输遵循CAN协议规定的格式和时序。
错误检测和处理
CAN协议中定义了多种错误类型和处理机制,包括位错误 、填充错误、CRC错误、格式错误和应答错误等。当检测 到错误时,发送节点会根据错误类型采取相应的处理措施 ,如重发报文、关闭发送器等。
当错误计数器达到或超过预定的 阈值时,节点会发送错误标志, 这通常是一个或多个特定的位模 式,用于通知总线上的其他节点
发生了错误。
错误状态
根据错误的类型和数量,节点可 能会进入不同的错误状态,如主 动错误状态、被动错误状态或总
线关闭状态。
故障恢复策略
自动重发
在检测到错误后,发送节点可以选择自动重发损坏的消息。这通常 会在错误处理完成后立即进行。
简要介绍CAN通信的基本原理和协议,为 后续的错误波形分析提供必要的理论基础 。
详细介绍CAN通信中常见的错误类型,如 位错误、填充错误、CRC错误等,并分析 其产生原因。
错误波形的特征和识别方法
实例分析和处理过程
重点阐述错误波形的特征,如位时间、电 压等级等,并介绍如何通过示波器等工具 进行错误波形的识别和测量。
驱动CAN错误波形
目录
最新CAN总线的波形图
C A N总线的波形图仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流仅供学习交流总结一下:仅供学习交流can总线:高电平表示逻辑0,低电平表示逻辑1。
can总线的起始场是一个bit的逻辑0(高电平),帧结束由7个bit的逻辑1(低电平)组成。
根据can总线的定义:在发生的时候,每连续五个bit的逻辑0,就会跟着补充一个bit的逻辑1;每连续五个bit的逻辑1,就会跟着补充一个bit的逻辑0。
因此根据上面的波形解析数据的时候,每出现000001这种数据串,那么1就是发送的时候根据can协议填充进去的,所以解码的时候1要去掉,即00000。
再举个例子:11111001表示的数据应该是:1111101。
RS232:(假定数据位8bit,停止位1bit,无奇偶校验)-12v表示逻辑1,+12v表示逻辑0.根据波形解析的时候,高电平表示逻辑0,低电平表示逻辑1。
RS232发送数据是以ascii码的形式发送出去的。
例如发送字符‘s’,实际上发送的就是0x73.每发送一个字符:仅供学习交流首先是一个bit的起始位(逻辑0),然后将ascii值的最低位发送出去,接着是次高位。
总之是低位在前,高位在后。
例如0x73,发送的时候就是:0b11001110。
接着就是1个bit的停止位(逻辑1)。
1个bit的逻辑的时间宽度就是:1/波特率(单位是秒)。
仅供学习交流。
CAN总线故障检测

dominant state
3.8 V
recessive state
2.6 V
CAN Low
Differenc e
1.1 V 2.7 V = 0
2.4 V 0.2 V = 1
差值> 2.3 V = result bit value 0 = dominant
差值 < 2.3 V = result bit value 1 = recessive
state
CAN High 4V (>3.6)
0V
CAN Low 1V (<1.4)
5V
Difference 3V=0 -5V=1
CAN Low recessive 1
CAN High recessive 1
CAN High dominant 0
CAN Low dominant 0
Difference > 2.2 V = result bit value 0 = dominant
Difference < 2.2 V = result bit value 1 = recessive
Both signals are always measured against earth
高速CAN总线容错能力
高速C A N网物理层,由于其内部结构的限制,不能提供容错方法。因为 高速C A N网的比较电路很简单,如果出现故障,比较器不会发送信号, 也没有办法实现通信。以下七种情况中,仅有两种情况在物理层容错范围 内,其他几种情况,网络是不能运行的,并且各个电控单元之间也不可以 实现通信。
装有CAN总线系统的车辆出现故障,维修人员应首先检查CAN总线系统是否正常 。因为CAN总线系统有故障,则整个汽车CAN总线系统中的有些信息无法传输,造 成接收这些信息的电控系统无法正常工作,使故障诊断变得更为困难。
can总线时序波形

CAN总线的时序波形主要包括起始位、数据位、填充位、停止位等。
以下是一个可能的CAN总线时序波形的示例:
1. 起始位:在总线空闲时,所有的节点都处于隐性状态。
当一个节点需要发送数据时,它会首先发送一个起始位,将总线从隐性状态变为显性状态。
2. 数据位:紧随起始位之后的是数据位。
数据位由5个显性位和0到2个隐性位组成。
然后是0到2个隐性位的填充位,用于保证数据位的数量和格式正确。
3. 填充位:在数据传输过程中,如果出现了连续5个显性位或更多,接收节点需要在第6个显性位处插入一个隐性位作为填充位,以避免数据错误。
4. 停止位:数据传输结束后,发送节点发送一个停止位,将总线从显性状态变为隐性状态。
需要注意的是,CAN总线的时序波形并不是固定的,具体的波形取决于总线的配置和节点之间的通信协议。
在实际应用中,应参考相关规范和协议来确定CAN总线的时序波形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
详解CAN总线几种正常的“异常”波形
工程师们通常使用示波器观察CAN 总线的信号质量,一般主要关注CAN 总线差分信号的幅值、最小位宽、边沿情况等。
相信不少工程师都看到过一条报文数据的波形上高高低低存在多个幅值,心里可能会变得忐忑不安,幅值不统一是不是波形出现畸变了呢?其实并非如此,今天就把CAN 总线上的幅值异常归归类。
一、CAN-bus 信号产生原理
众所周知,一个标准CAN 节点由微处理器、控制器、收发器构成。
多个节点成总线型架构挂在一起,两个端节点上并有终端电阻。
其结构简图如下图所示。
图1 CAN-bus 节点网络结构
可以看出,与总线直接相连的是CAN 节点的收发器,起内部电路等效如下图所示,CAN-H、CAN-L 直接由三极管驱动,近似可以看成电流型输出。
结合上文所述网络架构中的终端电阻,节点发出信号时电流流过终端电阻产生电压信号,当同一时间多个节点同时发出信号时就会使总线上的电流高于单一节点发出的电流,使得我们观察电压信号时出现突增的现象。
图2 CAN 收发器结构
CAN-bus 是总线型结构,通常状态下一般只有一个节点占有总线。
那么有几种情况会导致多个节点同时发出,进而导致幅值出现异常呢,下文通过致远电子CANScope 分析仪的几个测试案例总结一下。
二、应答位上的幅值异常
最常见的,当CAN 网络上存在3 个以上的节点时,应答位上的幅值要明显高于同一报文的其他位置,如下图所示。
可以看到报文在ID 段、数据段、。