电液位置伺服系统模糊速度补偿_复合控制
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化技术的飞速发展,电液伺服系统作为重要组成部分,在众多领域中发挥着重要作用。
然而,由于电液伺服系统存在非线性、时变性和不确定性等特点,其控制问题一直是研究的热点和难点。
传统的PID控制方法在面对复杂多变的环境时,往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制的电液伺服系统控制策略,并进行了仿真与试验研究。
二、电液伺服系统概述电液伺服系统主要由液压泵、液压马达、传感器和控制器等部分组成。
它利用电信号驱动液压系统工作,实现对负载的精确控制。
由于其具有高精度、快速响应等特点,在机械制造、航空航天、船舶等领域得到了广泛应用。
然而,由于电液伺服系统的复杂性,其控制问题一直是研究的重点。
三、模糊PID控制策略针对电液伺服系统的特点,本文提出了一种模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优点,通过引入模糊逻辑对PID参数进行在线调整,以适应系统参数的变化和环境干扰。
模糊PID控制策略能够在保证系统稳定性的同时,提高系统的响应速度和抗干扰能力。
四、仿真研究为了验证模糊PID控制策略的有效性,本文进行了仿真研究。
首先,建立了电液伺服系统的数学模型和仿真模型。
然后,分别采用传统PID控制和模糊PID控制对模型进行仿真实验。
通过对比两种控制策略的响应速度、稳态精度和抗干扰能力等指标,发现模糊PID控制在电液伺服系统中具有更好的性能。
五、试验研究为了进一步验证模糊PID控制策略的实用性,本文进行了试验研究。
在试验过程中,首先搭建了电液伺服系统的试验平台,然后分别采用传统PID控制和模糊PID控制对实际系统进行控制。
通过对比两种控制策略的试验结果,发现模糊PID控制在电液伺服系统中具有更高的稳态精度和更快的响应速度。
此外,在面对环境干扰时,模糊PID控制也表现出更强的抗干扰能力。
六、结论本文通过对电液伺服系统的模糊PID控制进行仿真与试验研究,验证了该策略的有效性。
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言电液伺服系统是一种广泛应用于工业、航空、航天等领域的控制系统,其性能的优劣直接影响到整个系统的运行效果。
随着科技的发展,传统的PID控制已经无法满足复杂多变的控制需求,因此,研究新型的电液伺服系统控制策略具有重要的实际意义。
本文针对电液伺服系统,采用模糊PID控制策略进行仿真与试验研究,以期为实际应用提供理论依据。
二、电液伺服系统概述电液伺服系统主要由伺服阀、液压缸、控制器等部分组成。
其中,控制器是系统的核心部分,负责接收指令并输出控制信号。
传统的PID控制虽然简单有效,但在面对复杂多变的控制环境时,其控制效果往往不尽如人意。
因此,本文采用模糊PID控制策略,以提高电液伺服系统的控制性能。
三、模糊PID控制策略模糊PID控制是一种将模糊控制与PID控制相结合的控制策略。
该策略通过引入模糊逻辑,对PID控制的参数进行在线调整,以适应不同的控制环境。
具体而言,模糊PID控制通过建立模糊规则库,将控制误差和误差变化率作为输入,对PID控制的三个参数(比例系数、积分系数、微分系数)进行在线调整。
这样,在面对复杂多变的控制环境时,模糊PID控制能够根据实际情况自动调整参数,提高系统的控制性能。
四、仿真研究本文采用MATLAB/Simulink软件进行仿真研究。
首先,建立了电液伺服系统的仿真模型,包括伺服阀、液压缸、控制器等部分。
然后,将模糊PID控制策略应用于仿真模型中,与传统的PID控制进行对比。
仿真结果表明,在面对复杂多变的控制环境时,模糊PID控制的响应速度更快、超调量更小、稳态误差更低,具有更好的控制性能。
五、试验研究为了进一步验证模糊PID控制的实际效果,本文进行了试验研究。
首先,搭建了电液伺服系统的试验平台,包括伺服阀、液压缸、传感器等部分。
然后,将模糊PID控制策略应用于试验平台中,与传统的PID控制进行对比。
试验结果表明,模糊PID控制在面对实际工况时,同样具有更好的控制性能和更高的稳定性。
电液伺服系统在数控机床中的应用

电液伺服系统在数控机床中的应用伺服系统是一种通过感应和响应外部信号来调整输出的自动控制系统。
电液伺服系统是一种使用电力和液压传动技术的伺服系统,被广泛应用于数控机床中。
本文将探讨电液伺服系统在数控机床中的应用,并介绍其优势和发展趋势。
一、电液伺服系统的工作原理电液伺服系统主要由电液伺服阀、液压伺服缸、传感器、执行器和控制器等组成。
其工作原理是:控制器通过传感器获得外部输入信号,然后将信号传递给电液伺服阀。
电液伺服阀根据接收到的信号来控制油路的开闭,调节液压伺服缸的运动。
液压伺服缸将运动转化为力或位移输出,从而实现对机械装置的精确控制。
二、1. 位置控制:电液伺服系统通过精确的位置控制能够实现数控机床的高精度加工。
通过传感器获得工作台或刀具的位置信号,控制器根据设定值对电液伺服阀进行控制,使得机械装置按照预定的路径和速度进行准确定位。
2. 速度控制:电液伺服系统能够实现数控机床的平稳加速和减速操作。
控制器根据设定值对电液伺服阀进行控制,调节液压伺服缸的运动速度,从而实现对机械加工的平滑速度控制。
3. 力控制:电液伺服系统能够实现数控机床的精确力控制。
通过传感器获取工作台或刀具的力信号,控制器根据设定值对电液伺服阀进行控制,调节液压伺服缸的输出力,确保机械装置对工件施加恰当的力。
4. 自动化操作:电液伺服系统能够实现数控机床的自动化操作。
通过控制器中预设的程序,可以实现自动切换刀具、自动换夹具、自动调整加工参数等功能,提高了数控机床的生产效率和加工质量。
三、电液伺服系统的优势1. 高精度:电液伺服系统具有响应速度快、位置控制精度高的特点,可以满足数控机床对于精密加工的要求。
2. 高可靠性:电液伺服系统由于采用了液压传动技术,具有承受高负载和冲击的能力,能够适应数控机床长时间、高负荷运行的需求。
3. 高适应性:电液伺服系统能够适应不同的加工需求,通过调整控制器中的参数实现不同的运动模式和控制策略。
4. 易于维护:电液伺服系统的设计相对简单,维修和更换零部件相对容易,能够降低机床维护成本和停机时间。
电液比例位置系统复合控制及相关研究
电液比例位置系统复合控制及相关研究一、概述电液比例位置系统作为现代工业控制领域的重要组成部分,广泛应用于各种机械设备和自动化生产线中。
该系统通过电液转换装置将电信号转换为液压动力,实现对执行机构的位置、速度和力等参数的精确控制。
随着工业技术的不断发展,对电液比例位置系统的性能要求也越来越高,复合控制技术的研究和应用显得尤为重要。
复合控制是指将两种或多种不同的控制方法结合在一起,以充分利用各种控制方法的优点,提高系统的整体性能。
在电液比例位置系统中,复合控制可以有效地解决单一控制方法难以处理的复杂问题,如非线性、时变性和不确定性等。
通过合理地设计复合控制策略,可以实现对系统性能的优化和提升,满足实际应用的需求。
本文旨在深入研究电液比例位置系统的复合控制技术,探讨不同控制方法之间的融合方式和优化策略。
我们将对电液比例位置系统的基本原理和特性进行介绍,为后续的研究奠定基础。
我们将分析现有复合控制技术在电液比例位置系统中的应用现状,指出其存在的问题和不足之处。
接着,我们将提出一种新型的复合控制策略,并详细阐述其设计思路、实现方法和性能特点。
我们将通过实验验证该复合控制策略的有效性,并与其他控制方法进行对比分析,以证明其在提高系统性能方面的优越性。
通过对电液比例位置系统复合控制技术的深入研究,我们期望能够为相关领域的研究人员和工程师提供有益的参考和借鉴,推动该技术的进一步发展和应用。
1. 电液比例位置系统的概述电液比例位置系统,作为一种先进的控制技术,在液压和电气领域中发挥着重要的作用。
它结合了电气信号的控制灵活性与液压系统的动力传递能力,实现了对液压装置流量、压力和方向的精确控制。
这种系统在工业、农业以及其他多个领域具有广泛的应用前景,如机械加工、钢铁生产、工程机械、船舶设备、汽车工程等。
电液比例位置系统主要由电气系统、比例电磁阀、液压装置以及反馈装置等四部分构成。
电气系统负责控制电气信号的发射和接收,而比例电磁阀则是实现电气信号到液压信号转换的关键部件。
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化和智能化的飞速发展,电液伺服系统作为高端技术装备的重要核心部件,在多个领域有着广泛的应用。
由于传统PID控制难以处理复杂的非线性系统和动态环境下的不确定性问题,为了进一步改善系统的性能和稳定性,本文提出了一种基于模糊PID控制的电液伺服系统控制策略。
本文将对该控制策略进行仿真与试验研究,并分析其性能和效果。
二、电液伺服系统概述电液伺服系统是一种以液压传动为基础,利用反馈原理和现代控制技术实现高精度、高响应速度的自动控制系统。
其工作原理是通过伺服阀将输入的电信号转换为液压能,驱动执行机构进行工作,同时通过传感器将执行机构的位移或速度等信息反馈给控制系统,形成闭环控制。
三、模糊PID控制策略针对电液伺服系统的非线性和不确定性问题,本文采用模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优势,通过引入模糊逻辑算法对PID参数进行在线调整,以适应系统的动态变化。
模糊PID控制策略包括模糊化、规则库、推理机和解模糊化等环节,能够根据系统的实时状态调整PID参数,提高系统的响应速度和稳定性。
四、仿真研究本文利用MATLAB/Simulink软件对电液伺服系统进行仿真研究。
首先建立了电液伺服系统的数学模型,然后分别对传统PID控制和模糊PID控制进行仿真对比。
仿真结果表明,在阶跃响应和正弦波跟踪等工况下,模糊PID控制具有更好的响应速度和稳定性,能够有效地抑制系统的超调和振荡。
五、试验研究为了进一步验证模糊PID控制在电液伺服系统中的效果,本文进行了实际试验研究。
试验中,我们将模糊PID控制策略应用于电液伺服系统,并与传统PID控制进行对比。
试验结果表明,在负载变化和外部环境干扰等复杂工况下,模糊PID控制能够保持较高的控制精度和稳定性,具有较好的鲁棒性。
六、结论本文针对电液伺服系统的非线性和不确定性问题,提出了一种基于模糊PID控制的控制策略。
电液位置同步伺服系统的模糊控制研究

和 k一1 别 表示 离散 时间 系统 的 当前 时 刻和前 一 时 分
复合控制器 , , 系统 具有 鲁棒 胜和精 确 性 为 r 使 验 证控 制性能 ,本 文将 这种 控制 器应 用 于 电液位 置 同步
系统的实时控 制 。 位置 同步系统 的结 构差异会 带来不同的控制 效果 ,
2 u 一PD复合控 制器 的设计 F z I
括死区 、摩擦和滞环 等 的非 线性 环 节 又是未 知 和时变
的。为解决上述 问题 ,很 多 研究 已被提 出 ,但 各有缺
陷 ,例如 PD控 制 器很 难 获得 满意 的效果 .自适 应控 I
制器通常要求较快 的 C U执行 速 度 .对于 时变性 较 陕 P 的液压控制系统难 于达到 良好的实 时性 。 自从模糊控 制 器 出现 以来 ,得 到 了广泛 应用 一通 常模糊控制器 由语 言 性控 制规 则 构成 .对于 输 八和输
维普资讯
《 机床与液压》90 o 1 , 2 N 0
・8 3
电液 位 置 同步 伺服 系统 的模 糊控 制研 究
管杨 新 ,胡 大邦 , 王 奕豫
( 炭 科 学研 究 总 院 上 海 分 院 液 压研 究 所 ,90 3 ) 堞 _ 00 0
本文对 同步 系统 中常用 的两种 控 制策 略进行 了 比较 和 分析 因 为它 们各 自都 有局 限性 ,所以综 台采 用两 种
策略的 同步系统可 获得更好的 动态和稳态特性 。 1 电液位置 同步控 制 系统 的组成
图 2 模 糊控制 系统方框图
采用 7个语言 模 糊集来 描述 所 有的输 入 、输 出模
P M P B P 8
P M P B
( )并 、串复台联接 C
电液比例速度系统的前馈模糊复合控制研究
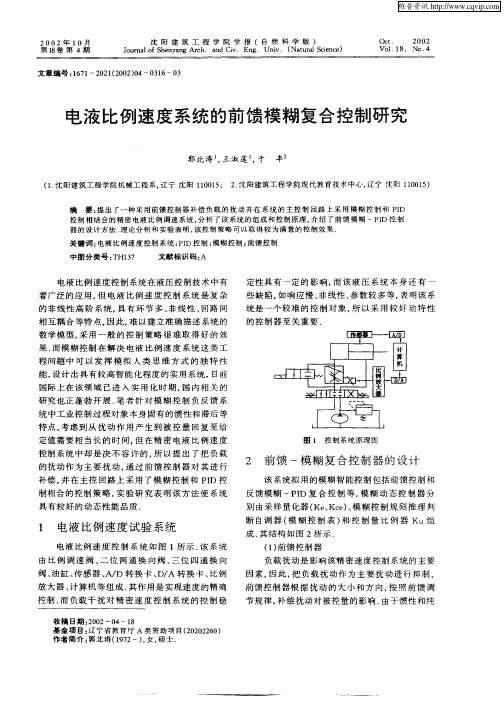
摘 要 : 出 了一 种 采 用 前 馈 控 制 器 补 偿 负 载 的 扰 动 并 在 系 统 的 主 控 制 回 路 上 采 用 模 糊 控 制 和 P D 提 I 控 制 相 结 合 的 精 密 电液 比例 调 速 系 统 , 析 了该 系 统 的 组 成 和 控 制 原 理 , 绍 了前 馈 模 糊 一P D控 制 分 介 I 器 的 设 计 方 法 . 论 分 析 和 实 验 表 明 , 控 制 策 略 可 以取 得 较 为 满 意 的 控 制 效 果 , 理 该
电液 比例 速 度 控 制 系 统 如 图 1所 示 . 系统 该 由 比例 调 速 阀 、 位 两 通 换 向 阀 、 位 四 通 换 向 二 三 阀、 油缸 、 传感 器 、 / 转 换 卡 、 / AD D A转 换 卡 、 比例 放 大器 、 算 机等 组 成 . 作用 是 实现 速度 的精 确 计 其
Oc t. 2002 Vo 18. No. 1. 4
文 章 编 号 :6 1 0 12 0 )4—0 1 —0 1 7 —2 2 (0 2 0 36 3
电 液 比 例 速 度 系 统 的 Nhomakorabea前 馈 模 糊 复 合 控 制 研 究
郭北 涛 王淑 莲 于 丰 , ,
( . 阳 建 筑 工 程 学 院 机 械 工 程 系 , 宁 沈 阳 1 0 1 ; 2 沈 阳建 筑 工 程 学 院 现 代 教 育 技 术 中 心 , 宁 沈 阳 10 1 ) 1沈 辽 105 . 辽 1 0 5
2 前 馈 一模 糊 复 合 控 制 器 的设 计
该 系统 拟 用 的模糊 智 能控 制 包括 前馈 控 制 和 反馈 模糊 一P D 复 合 控 制 等 , 糊 动 态 控 制 器 分 I 模 别 由采 样量 化 器 ( e Kc ) 模 糊 控 制 规 则 推 理 判 K 、 e、
电液伺服系统的优化设计与控制研究
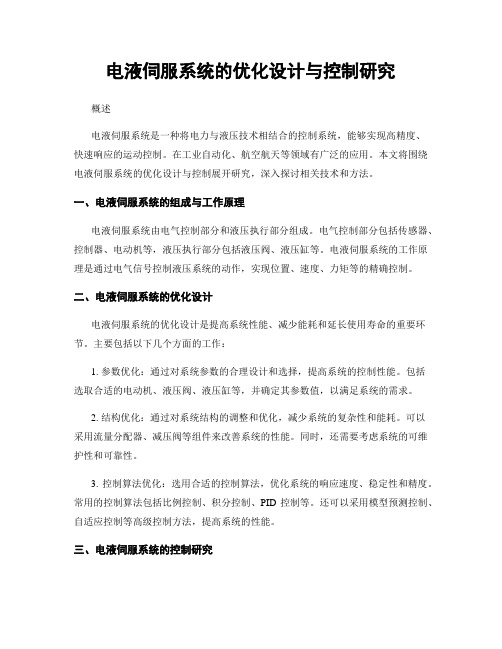
电液伺服系统的优化设计与控制研究概述电液伺服系统是一种将电力与液压技术相结合的控制系统,能够实现高精度、快速响应的运动控制。
在工业自动化、航空航天等领域有广泛的应用。
本文将围绕电液伺服系统的优化设计与控制展开研究,深入探讨相关技术和方法。
一、电液伺服系统的组成与工作原理电液伺服系统由电气控制部分和液压执行部分组成。
电气控制部分包括传感器、控制器、电动机等,液压执行部分包括液压阀、液压缸等。
电液伺服系统的工作原理是通过电气信号控制液压系统的动作,实现位置、速度、力矩等的精确控制。
二、电液伺服系统的优化设计电液伺服系统的优化设计是提高系统性能、减少能耗和延长使用寿命的重要环节。
主要包括以下几个方面的工作:1. 参数优化:通过对系统参数的合理设计和选择,提高系统的控制性能。
包括选取合适的电动机、液压阀、液压缸等,并确定其参数值,以满足系统的需求。
2. 结构优化:通过对系统结构的调整和优化,减少系统的复杂性和能耗。
可以采用流量分配器、减压阀等组件来改善系统的性能。
同时,还需要考虑系统的可维护性和可靠性。
3. 控制算法优化:选用合适的控制算法,优化系统的响应速度、稳定性和精度。
常用的控制算法包括比例控制、积分控制、PID控制等。
还可以采用模型预测控制、自适应控制等高级控制方法,提高系统的性能。
三、电液伺服系统的控制研究电液伺服系统的控制是其研究的核心内容。
在实际应用中,为了满足不同的控制需求,需要研究和开发相应的控制方法和技术。
以下是几个常见的控制研究方向:1. 位置控制:电液伺服系统可以实现高精度的位置控制。
可以通过采用编码器等传感器,将位置信号反馈给控制器进行闭环控制。
同时,还可以采用滤波器、补偿器等技术,减少位置误差和振荡现象。
2. 力矩控制:对于需要精确控制力矩的应用场景,如机械臂、液压切割等,通过采用力传感器等设备,可以实现对力矩的精确控制。
需要研究合适的力矩控制算法和技术,提高系统的控制精度。
电液伺服系统的性能分析与优化设计

电液伺服系统的性能分析与优化设计电液伺服系统是一种应用广泛的控制系统,广泛应用于工业自动化、航天航空、机械制造等领域。
本文将对电液伺服系统的性能进行分析,并提出优化设计的方法。
首先,我们来看电液伺服系统的基本组成。
它由液压执行器、电液传动装置、控制器和传感器组成。
液压执行器负责将电能转化为机械能,电液传动装置通过液压介质传递能量,控制器根据传感器的反馈信号调节系统的输出。
电液伺服系统的性能指标主要包括响应速度、稳定性和精度。
响应速度是指系统对输入信号的快速响应能力,通常用调整时间和超调量来衡量。
稳定性是指系统在工作过程中能够保持稳定的输出。
精度是指系统输出与给定值之间的偏差。
对于电液伺服系统的性能分析,我们首先要考虑的是系统的动态响应。
在设计过程中,通过对系统进行数学建模,并利用控制理论和方法来分析系统的频率响应和传递函数。
通过对系统的闭环传递函数进行稳定性分析,可以确定系统的闭环稳定区域,并设计合适的控制器来保持稳定。
其次,要考虑电液伺服系统的稳定性问题。
在控制系统的设计中,我们通常使用根轨迹和Bode图等方法来分析系统的稳定性。
根轨迹是由系统的传递函数所决定的,它描述了系统在不同参数下的闭环稳定性特性。
Bode图则提供了系统的幅频响应和相频响应。
最后,我们要关注电液伺服系统的精度。
在实际应用中,由于系统的非线性因素和环境干扰,系统的输出往往与给定值之间会存在一定的误差。
为了提高系统的精度,可以采用补偿措施,例如使用预测控制、模糊控制等方法。
针对电液伺服系统的性能分析,我们可以提出一些优化设计的方法。
首先,对系统的动态特性进行仿真分析,通过调整系统的参数来优化系统的动态响应。
其次,合理选择传感器和控制器,以提高系统的稳定性。
最后,对系统的非线性因素进行建模与补偿,以提高系统的精度。
总之,电液伺服系统的性能分析和优化设计是一个复杂而关键的过程。
通过对系统的动态响应、稳定性和精度进行分析和优化,可以提高系统的控制精度和效率。
位置扰动性电液力伺服控制系统的复合控制研究
a l c n r le f c o u e t e c n r l ta e y t p l o t e c n r l o d n y t m. b e o to fe tt s h o to r t g O a p y t h o to a ig s s e s l
液压位置伺服系统模糊自适应PID控制算法研究
适 应 P D 控 制 算 I
法 。其 控 制 原理 框 图如 图 2所 示 。
图 2 模糊 自整定 PD控制原理框图 I
2 控 制 算法 研 究 2 1控 制 原 理 .
考 虑 到液 压 伺 服 系统 的位 置 控 制 对 象 它 不 仅具 有 模 型 参 数
不 确定 , 变 特性 且 系 统 具有 于扰 特 点 。 文 提 出 了 一种 利 用模 时 本 糊 控 制 克 服 模 型 参 叩)
得 良好 的控 制 效 果 , 中提 出 了一 种 将 模糊 控制 、 文 自适应 控制 和 PD控 制 相 结合 的复 合 控 制 算 法 ,组 成基 于模 糊 自适 应 PD位 I I 置 实 时控 制 系统 。利 用模 糊 自整 定 PD控 制 对 模 型 参数 要 求 的 I 不 精确 性 和 在线 调 整 的适 应 性 、 干扰 能力 强 , 成 了模 糊 自整 抗 构
强 一 于 军 琪 ( 西安 建筑科技 大 学信 息与控 制 工程 学院 , 陕西 西安 7 0 5 ) 10 5
刘 煦 ( 西安 建筑科技 大 学土木 工程 学院 , 西 西安 7 0 5 ) 陕 10 5
摘 要
针 对 某 部 级 重 点 实验 室的 MT S液 压 位 置伺 服 系统 所具 有 的 时 变 , 动 的 特 点 , 出 了模 糊 自适 应 P D控 制 算 法 , 扰 提 I 利 用模 糊 自整 定 P D 能 对具 有 时 变、 扰 特性 的被 控 参数 取 得 的 良好 控 制 效 果 。仿 真 结 果表 明 , 过 对 液 压伺 服 系统位 置的 I 干 通
Si uat n e ul h ws ha ti m eh o ai g d m l i rs t o s o t t hs tod bt ns oo co r p f man e o h po ion.O h al i m s oud nt ol er or c t te st S t e gorh i t h l be
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业和自动化技术的发展,电液伺服系统作为一种重要且复杂的高性能控制体系,已经广泛运用于众多工业领域,如机器人制造、工程机械和航天器控制系统等。
其中,控制算法的优化和改进是提高电液伺服系统性能的关键。
传统的PID控制算法在许多情况下已经无法满足高精度、高速度和高稳定性的要求。
因此,本文将探讨一种新型的模糊PID控制算法在电液伺服系统中的应用,并对其进行仿真与试验研究。
二、电液伺服系统概述电液伺服系统是一种基于电信号控制液压驱动的高效能控制系统。
它由传感器、执行器、控制器等部分组成,能够快速、精确地响应控制信号,具有较高的运动控制性能。
然而,由于其复杂性,其控制系统在受到多种因素的影响下容易发生扰动,因此对控制算法提出了较高的要求。
三、模糊PID控制算法原理及设计1. 模糊PID控制算法原理:该算法是一种将模糊控制和传统PID控制相结合的控制算法。
模糊控制能够处理不确定性和非线性问题,而PID控制则具有精确的响应和稳定的性能。
通过将两者结合,可以有效地提高系统的响应速度和稳定性。
2. 模糊PID控制算法设计:在设计中,我们首先确定了系统的输入和输出变量,然后通过模糊逻辑推理和PID算法相结合的方式对系统的控制参数进行动态调整。
该算法通过不断学习和调整模糊规则库和PID参数,实现了对系统的最优控制。
四、仿真研究本文使用MATLAB/Simulink软件对电液伺服系统进行了仿真研究。
通过将模糊PID控制算法应用于电液伺服系统模型中,我们发现该算法在面对不同扰动时能够快速、准确地调整控制参数,使得系统具有更高的响应速度和稳定性。
与传统的PID控制算法相比,模糊PID控制算法在许多情况下表现出更好的性能。
五、试验研究为了验证仿真结果的准确性,我们在实际电液伺服系统中进行了试验研究。
试验结果表明,模糊PID控制算法在实际应用中同样表现出较高的响应速度和稳定性。
《电液位置伺服控制系统的模糊滑模控制方法研究》
《电液位置伺服控制系统的模糊滑模控制方法研究》篇一一、引言随着工业自动化和智能化的发展,电液位置伺服控制系统在各类工程中发挥着日益重要的作用。
它是一个高精度的动态系统,对于快速响应、稳定运行及精准定位具有严格的要求。
因此,设计一套能够有效处理外部干扰、模型不确定性和系统非线性的控制策略成为了关键所在。
模糊滑模控制作为一种融合了模糊逻辑和滑模控制的先进控制方法,能够很好地应对这些问题。
本文旨在研究电液位置伺服控制系统的模糊滑模控制方法,以提升系统的性能。
二、电液位置伺服控制系统概述电液位置伺服控制系统是一种基于液压驱动的闭环控制系统,主要用于精确控制各种机械设备的运动位置。
其基本结构包括控制器、驱动器、执行器和传感器等部分。
这种系统需要满足高精度、快速响应、稳定性强等特点,特别是在复杂的工业环境中,更需要具备良好的鲁棒性和抗干扰能力。
三、模糊滑模控制原理及优势模糊滑模控制是现代控制理论中一种结合了模糊逻辑和滑模控制的控制方法。
其核心思想是通过引入模糊逻辑处理系统的非线性部分,并通过滑模控制的特性来实现系统在不稳定情况下的稳定运动。
此方法能够有效应对系统模型的复杂性、非线性和外部干扰,并具备很好的鲁棒性。
四、模糊滑模控制在电液位置伺服控制系统中的应用针对电液位置伺服控制系统的特点,本文研究了模糊滑模控制在其中的应用方法。
首先,对系统的模型进行准确建模,识别出其非线性和不确定性部分。
然后,利用模糊逻辑对这些部分进行处理,得到模糊规则集。
接着,结合滑模控制的特性,设计出适合该系统的模糊滑模控制器。
通过仿真实验和实际运行测试,验证了该方法在电液位置伺服控制系统中的有效性和优越性。
五、实验结果与分析通过在电液位置伺服控制系统中应用模糊滑模控制方法,我们得到了显著的实验结果。
与传统的PID控制方法相比,模糊滑模控制方法在响应速度、稳定性和精度等方面均表现出明显的优势。
特别是在面对外部干扰和模型不确定性时,该方法能够快速调整并恢复稳定状态,显示出其强大的鲁棒性。
电液位置伺服系统pwm控制的方法

电液位置伺服系统pwm控制的方法
电液位置伺服系统pwm控制是用一种周期性的脉冲宽度调制(Pulse Width Modulation,PWM)信号来控制电液位置伺服系统中的电机,以实现位置和速度控制目的。
使用PWM控制可以根据实际需要调整电机的转矩,从而更好地控制制动系统的位置,从而
实现高精度的位置控制。
电液位置伺服系统PWM控制具有许多优点,首先,它可以实现高分辨率的位置控制,
有助于电位速度控制,提高精度和响应速度,并降低噪声。
其次,PWM控制可以改善电机
的效率和动力学特性,延长寿命,减少安装空间。
此外,PWM控制可以降低操作者对设备
故障的概率,减少了维护和维修成本,提高了整体系统的可靠性。
实现电液位置伺服系统PWM控制的关键技术是一个可编程控制器。
控制器将基于目标
位置或速度信息和反馈位置或速度信息,通过对PWM输出信号的调整来生成控制调整,以
便使实际位置或速度符合预定期望的位置或速度。
这也要求电液位置伺服系统的硬件部分
必须具备电液传动器,该传动器可根据传感器反馈的位置信息及控制器输出的PWM调制断
开电源,形成阶段性的正反转电机。
电液位置伺服系统的PWM控制技术可以有效控制电机的转速和转矩,实现准确的位置
控制,为实现精确控制提供可靠的保证。
电液伺服系统Bang_Bang_Fuzzy_PID复合控制研究
电液伺服系统Bang_Bang_Fuzzy_PID复合控制研究2009年4⽉第37卷第4期机床与液压MACH I N E T OOL &HY DRAUL I CSAp r 12009Vol 137No 14收稿⽇期:2008-04-11作者简介:孟珺遐(1974—),⼥,博⼠研究⽣,主要从事电液⽐例/伺服系统的控制等⽅⾯的研究。
电话:131********,E -mail:jx meng_bit@1631com 。
电液伺服系统Bang 2Bang +Fuzzy 2PID 复合控制研究孟珺遐,王渝,王向周(北京理⼯⼤学信息科学技术学院,北京100081)摘要:针对电液伺服系统模型的不精确、不确定及负载扰动⼤等特点,结合Bang 2Bang 控制、Fuzzy 控制和P I D 控制,采⽤了⼀种复合控制策略。
阐述了控制器的设计过程并在MAT LAB /SI M UL I N K 中进⾏了仿真,结果表明:复合控制器在抗扰能⼒、快速性、动态跟踪品质和控制精度等⽅⾯均具有良好的性能。
最后,分析了这种控制器存在的不⾜和改进的⽅法,确定了后续研究的⽅向。
关键词:Bang 2Bang 控制;Fuzzy 2P I D 控制;复合控制;仿真中图分类号:TP273+13 ⽂献标识码:A ⽂章编号:1001-3881(2009)4-089-3Research on Bang 2Bang +Fuzzy 2P I D Hybr i d Con trol for Electro 2hydrauli c Servo Syste mME NG Junxia,WANG Yu,WANG Xiangzhou (School of I nfor mati on Science and Technol ogy,Beijing I nstitute of Technol ogy,Beijing 100081,China )Abstract:I n most cases,electr o 2hydraulic servo syste m model is i m p recise and uncertain,endured large l oad variati on disturb 2ance .A hybrid contr ol strategy based on Bang 2Bang contr ol,fuzzy l ogic contr ol and P I D contr ol was discussed .Designing p r ocedure of contr oller and cyber 2si m ulati on in MAT LAB /SI M UL I N K were rep resented .Result of si m ulati on shows this kind of contr oller has good perf or mance on r obustness against external disturbance,res ponse s peed,dynam ic trace and contr ol p recisi on .The shortage ofthe contr oller was analyzed,s oluti on was put f or ward .Keywords:Bang 2Bang contr ol;Fuzzy 2P I D contr ol;Hybrid contr ol;Cyber 2si m ulati on0 引⾔通常情况下建⽴的电液系统的数学模型存在不确定性,这是因为某些系统参数很难获得精确值,⽽仅能知道其⼀个⽐较准确的估计值(或者称为标称值)。
关于电液比例位置控制系统的死区模糊补偿控制研究
偿的控制,三个控制器分别是缸位移 PID 调节器、比例阀 位置精度明确具体的死区补偿值。根据死区模糊补偿控
阀芯位移 PID 调节器以及线圈电流 PID 调节器。在空载的 制的规则以及电液比例阀位置控制系统的特征,本文构
工况下,应用 PID 控制算法对电液比例位置控制系统进行 建了死区模糊补偿控制系统,通过常规数字 PID 控制结
降低,并且也加剧了车刀的磨损,同时对操作人员形成安
盂粒状切屑。
全隐患。因此对车削中断屑的研究对提升车床生产工艺有
关键词院模糊补偿;电液比例阀;PID 控制
0 引言
死区模糊控制补偿的分析,可以明确死区的具体补偿状
从本质角度而言,电液比例位置系统具备显著的时变 况,掌握电液比例位置控制系统的运行稳定性以及定位
性以及非线性特征,在运行过程中会出现变流量死区,需 精度[1]。
要采用有效的控制方法降低变流量死区对系统正常运行
全新的控制策略完成死区补偿,避免死区对控制系统的精 死区补偿值的修改;于如果定位误差小于误差最小值,可
准控制造成负面影响。
以认为死区补偿属于欠补偿,需要适当增加死区补偿量;
1.2 电液比例位置控制系统死区分析
盂如果定位误差大于误差阈值,可以认为死区补偿属于系
流量死区属于电液比例阀的特征,主要由比例阀芯的 统过补偿,在这种情况下位置系统会出现自激振荡现象,
补偿的分析主要是对变死区模糊控制补偿的分析。而对于 变死区补偿算法的相应原则,结合电液要
作者简介院李心宇(1994-),男,河北石家庄人,在读硕士研究生,
程,制定出变死区补偿模糊控制的相应规则。
研究方向为车辆工程。
2.2.2 构建模糊控制查询表
制算法,对死区模糊补偿进行控制。数字 PID 控制算法主 统的控制,因为模糊控制方法在这类非线性系统中具备显
电液位置伺服控制系统
电液位置伺服控制系统摘要:采用电液比例方向阀,设计了电液位置伺服控制系统,以LABVIEW和MATLAB混合编程实现系统的实时控制功能,以个人计算机为数字控制器,采用NI公司的USB-6008数据采集卡完成数据采集、数据输出控制等多项功能。
针对电液比例位置控制系统的特点,建立数学模型。
对于系统的不稳定性,采用PID控制算法对其进行校正,提高了系统的精度及响应速度。
关键词:LABVIEW,MATLAB,位置控制,PID算法0前言电液位置伺服系统是最基本和最常用的一种液压伺服系统,如机床工作台的位置、板带轧机的板厚、带材跑偏控制、飞机和船舶的舵机控制、雷达和火炮控制系统以及振动试验台等。
在其它物理量的控制系统中,如速度控制和力控制等系统中,也常有位置控制小回路作为大回路中的一个环节电液位置伺服系统主要是用于解决位置跟随的控制问题,其根本任务就是通过执行机构实现被控量对给定量的及时和准确跟踪,并要具有足够的控制精度。
电液伺服系统的动态特性是衡量一套电液伺服系统设计及调试水平的重要指标。
它由电信号处理装置和若干液压元件组成,元件的动态性能相互影响,相互制约及系统本身所包含的非线性,致使其动态性能复杂。
因此,电液伺服控制系统的设计及仿真受到越来越多的重视[1]。
本文以比例方向阀实现对伺服油缸的位置控制,加入位移传感器构成位置闭环控制系统。
采用NI公司的USB-6008数据采集卡完成数据采集、数据输出控制等多项功能,以LABVIEW和MATLAB混合编程实现了良好的实时控制功能。
1系统原理及建模1.1系统组成及原理电液位置伺服控制系统以液体作为动力传输和控制介质,利用电信号进行控制输入和反馈。
只要输入某一规律的输入信号,执行元件就能启动、快速并准确地复现输入量的变化规律。
控制系统结构图如图1所示:图1电液位置伺服控制系统结构图1.2电液位置伺服系统建模本系统的电液比例方向阀为BFW-03-3C2-95-50,通径为10mm ,最高工作压力31.5MPa ,最大流量50l/ min 。
《电液位置伺服控制系统的模糊滑模控制方法研究》范文
《电液位置伺服控制系统的模糊滑模控制方法研究》篇一一、引言电液位置伺服控制系统在现代工业领域扮演着举足轻重的角色,其控制精度与响应速度直接决定了系统的工作效率与稳定性。
传统的控制方法往往在某些复杂的非线性或不确定性环境中,表现出局限性和不足。
因此,针对电液位置伺服控制系统的控制方法研究,尤其是对于模糊滑模控制方法的研究,具有重要的理论意义和实际应用价值。
二、电液位置伺服控制系统概述电液位置伺服控制系统主要由液压执行机构、传感器、控制器等部分组成。
其工作原理是通过控制器对液压执行机构进行精确控制,使系统能够按照预设的轨迹进行运动。
然而,由于系统中的各种不确定性和非线性因素,如液压系统的非线性特性、环境因素的干扰等,使得传统控制方法难以达到理想的控制效果。
三、模糊滑模控制方法研究针对电液位置伺服控制系统的特点,本文提出了一种模糊滑模控制方法。
该方法结合了模糊控制和滑模控制的优点,能够在系统面临不确定性和非线性因素时,实现更精确的控制。
1. 模糊控制模糊控制是一种基于模糊集合理论的控制方法,能够处理复杂的非线性问题。
在电液位置伺服控制系统中,模糊控制可以根据系统的实时状态,通过模糊推理,得到合适的控制策略,实现对系统的精确控制。
2. 滑模控制滑模控制是一种变结构控制方法,能够在系统面临不确定性和干扰时,通过调整系统的结构,使系统在滑模面上进行滑动,从而实现精确的控制。
在电液位置伺服控制系统中,滑模控制可以有效地抵抗系统的不确定性和非线性因素。
3. 模糊滑模控制的结合本文将模糊控制和滑模控制相结合,形成了一种新的控制方法——模糊滑模控制。
该方法在系统面临不确定性和非线性因素时,能够根据系统的实时状态,通过模糊推理得到合适的滑模面结构,并调整系统的控制策略,使系统在滑模面上进行滑动,从而实现精确的控制。
四、实验与分析为了验证模糊滑模控制在电液位置伺服控制系统中的有效性,我们进行了大量的实验。
实验结果表明,模糊滑模控制方法在面对系统的不确定性和非线性因素时,能够表现出更好的鲁棒性和控制精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
置伺服系统的响应快速性、 稳态精度以及抗干扰设 计等方面取得了较好成果, 但均忽略了系统超调量 的影响, 特别是变负载刚度条件下对系统超调的控 制方法尚未涉及, 而此超调量经过机械结构的放大, 极易产生破坏性结果。 为此, 本文提出模糊速度补 偿 μ 复合控制策略, 以实现变负载刚度条件下电液 位置伺服系统的精确控制。
由此可知, 阀芯位移与负载流量之间为非线性 关系, 但伺服阀输入电流与阀芯位移之间为线性关 系, 采用相应的措施, 对伺服阀的非线性进行补偿, 使负载流量和输入电流呈线性关系, 可使补偿后的 伺服阀等效流量增益为固定值, 即, 使系统的增益维 持恒定, 从而实现了伺服阀输入信号与输出流量之 间的确定线性关系
[11 - 12 ] 。 为性能评价输出信号 ( 1 ) 以式 作为标称模型, 以式( 2 ) 作为摄动界模 型, 则最终摄动为( G1 - G0 ) / G0 , 选择权函数 W1 ( s )
图 4 为提出的模糊速度补偿 μ 复合控制器框 图, 模糊速度补偿控制器设有位移偏差阈值 , 并对采 集的伺服缸速度信号、 伺服缸两腔压力信号以及实 时偏差信号进行监测, 模糊补偿控制器依据采集信 号进行相应模糊推理, 输出伺服缸速度反向补偿量。 鲁棒控制器的主要作用是在系统参数发生变化 时, 维持系统性能恒定, 通过两者的复合控制, 既可 保证系统的快速性又可实现系统的无超调 , 进而使 系统达到精确的定位控制。
( i > 0) ( 5) ( i < 0)
图7 Fig. 7
电液位置伺服系统 μ 综合 M - Δ 结构 position servo system
329
35 、 200 mm; 伺 服缸活塞、 活塞杆及行程分别为 50 、 位移传感器量程 服放大 器 增 益 K a = 0. 008 A / V, ± 100 mm, 增益 K f = 50 V / m。液压压力传感器量程
-7 0 ~ 21 MPa, 增益 K p = 2. 38 × 10 V / Pa。实验时, 供
( 1)
图4 Fig. 4
复合控制框图
Diagram of compound control
( 2)
而鲁棒 H ∞ 控制器适用于非结构不确 构不确定性, 定性问题, 如果应用鲁棒 H ∞ 控制器求解结构不确 定性问题将引起一定的保守性, 为克服 H ∞ 控制器 保守性问题, 采用结构奇异值 μ 作为 本 文 的 控 制 器
图1 Fig. 1
电液位置伺服系统框图
System diagram of electrohydraulic position servo
针对研究对象负载刚度的摄动, 在其摄动的上、 下限分别进行系统参数辨识。 系统主要参数为: 电 液伺服阀额定压力 21 MPa, 额定流量 30 L / min, 额 定电流 40 mA, 幅频和相频均在 100 Hz 以上; 电液伺
[10 ]
图 3 为小刚度和大刚度下辨识模型数据与实际 数据的对比图, 仿真结果与实验数据基本一致。
。
2
电模糊速度补偿鲁棒 μ 复合控制
进行 μ 控制器设计时应首先给出系统不确定性 并将其与标称被控对象进行 和性能要求的权函数, 连接组成闭环互联结构, 电液位置伺服系统的闭环 e 为偏差 互联结构如图 5 所示, 其中 r 为指令信号, u 为控制器输出信号、 w 为干扰输入、 K ( s) 为 信号、 G ( s ) 为 标 称 对 象、 W1 ( s ) 为 性 能 权 函 数 、 控制器、 W2 ( s) 为控制器输出权函数, W3 ( s) 为鲁棒稳定权函 , 数 Δ gI 为稳定的未知传递函数, 满足范数有界条件, Z1 、 Z2 与 W3 ( s) 组合共同参数化模型中的不确定性 ,
权函数伯德图如图 6 所示。
槡[
]
( 3)
QL — m3 / s —滑阀负载流量, — —滑阀流量系数 — Cd — W— — —伺服阀面积梯度 m xv — —滑阀阀芯位移, — — — ps — Pa —液压油密度 —油源压力, ρ— — p1 — Pa —供油腔压力, Pa —回油腔压力, — p2 —
Email: sunguitao86@ 163. com 作者简介: 孙桂涛, 博士生, 主要从事电液伺服控制研究, Email: sjp566@ sina. com 通讯作者: 邵俊鹏, 教授, 博士生导师, 主要从事电液伺服控制研究,
第8 期
孙桂涛 等: 电液位置伺服系统模糊速度补偿 μ 复合控制
油压力 6 MPa , 惯性负载 25 kg, 弹性负载可调。辨识 输入信号采用正弦扫频信号, 幅值 20 mm, 初始频率 0. 2 Hz, 每隔 4 个信号周期频率增加 0. 2 Hz, 最终频 率为 12 Hz。扫频输入信号及 2 种负载刚度条件下 系统实时响应曲线如图 2 所示。
图3 Fig. 3 图2 Fig. 2 辨识信号 Identification signal
模型输出曲线 Model output curve
( b) 大刚度
( a) 小刚度
应用 Matlab 辨识工具箱, 通过对输入输出信号 进行去趋势、 去均值处理, 选用状态空间模型进行系 统辨识, 经辨识得到小刚度和大刚度条件下的对称 阀控制对称缸三阶模型分别为 - 0. 011 516 ( s - 1 374 ) · G0 ( s) = s - 0. 084 8 s2 - 127. 6 s + 1. 153 × 10 4 s2 + 195. 5 s + 5. 362 × 10 4 - 0. 006 980 9 ( s - 2 460 ) · G1 ( s) = s + 0. 001 818 s2 - 113. 1 s + 1. 059 × 10 4 s2 + 205 s + 5. 461 × 10 4
+
流量补偿
半物理仿真 1298 ( 2014 ) 08032806 文章编号: 1000-
中图分类号: TH137 ; TP273 . 3
文献标识码: A
引言
电液位置伺服系统具有驱动力大 、 功率密度高、 带载能力强等特点, 被广泛应用于民用及国防领域, 研究者在不同应用背景下, 依据电液位置伺服系统 的特点, 将其与先进的控制算法相结合取得了较好 1] 的控制效果。文献[ 应用自适应反步法进行电液 伺服系统的控制, 有效地克服了系统的不确定影响, 2]以 提高了系统的跟踪性能和抗干扰能力; 文献[ 辨识模型为对象, 应用 PID 控制和模糊控制组成的 复合控制器对电液位置伺服系统进控制 , 消除了模 糊控制的稳态误差, 提高了 PID 控制的响应速度, 改 3]应用模糊预测函数 善了系统的综合性能; 文献[ 法进行电液位置伺服系统的控制, 利用位置偏差和 偏差变化率对模糊控制器参数进行在线修改 , 提高 4]应用比例积 了系统的快速性和稳态精度; 文献[ 分微分型迭代学习控制算法设计位置同步控制系统 控制器, 采用双闭环控制, 使双缸互为跟踪对象, 使 双缸同步精度达到了 0. 2 % , 提高了双缸电液位置 5]将多滑膜神经网络控制 伺服的控制精度; 文献[ 应用到电液位置伺服系统的控制中, 克服了系统模 型中的未建模动态、 非匹配不确定性等问题, 提高了 6]应用设计的自抗扰控制 系统的抗干扰性; 文献[ 器进行电液位置同步系统的控制, 通过对速度系统 内部和外部扰动观测并加以补偿, 减小了系统的同 步误差, 提高了同步控制的精度。 研究者在电液位
[13 ]
取本系统权函数为 0. 000 2 ( s2 + 400 s + 10 4 ) W1 ( s ) = s2 + 0. 02 s + 10 - 4 W2 ( s) = 0. 1 W3 ( s ) = 1. 8 s 0. 01 s + 30
补偿控制器的主要作用是依据偏差信号的大小 对即将接近目标的系统进行速度的反相补偿 , 实现 系统的精确定位控制, 为实现此功能, 应保证指令信 号与负载流量的确定关系方程且此方程不受外界影 响。 伺服阀的压力流量方程为 Q L = C d Wx v 其中 式中 xv 1 ( p - p2 ) ps - | xv | 1 ρ Q L = ( Q1 + Q2 ) / 2
3
本系统中的参数摄动属于不确定性问题中的结
应具有低通特性, 且与零分贝线交点略低于系统闭 W2 ( s) 为控制器输出权函数, 环频宽, 限制控制器输 W3 ( s) 应能够覆盖系统的高频摄动, 出饱和, 为此选
330
农
业
机
械
学
报
2014年
性能块 Δ PI 使得鲁棒设计目标与 μ 的基本框架一致, 即控制器求解问题转换为传递函数 M 的结构奇异 K 迭代法进行求 值最小化 问 题, 此 问 题 可 通 过 D解。 依据所得阀控缸数学模型及所选权函数, 应用 Matlab 中的鲁棒控制工具箱进行求解, 经 3 次迭代, μ 达到 0. 956 , 解得 10 阶控制器, 应用平衡截断法对
图5 Fig. 5 电液位置伺服系统的闭环互联结构 Closedloop interconnection structure of
electrohydraulic position servo system
控制器进行降阶处理得控制器为 2. 937( s2 + 2. 044s + 1. 99) ( s2 + 194. 6s + 5. 362 × 104 ) K( s ) = ( s + 9. 343) ( s + 0. 01) 2 ( s2 + 140. 5s + 1. 402 × 104 ) 3. 2 3. 2. 1 模糊速度补偿器设计 流量补偿器