南方GPS软件解算
GPS基线解算的优化及平差的方法技巧
GPS数据处理GPS基线解算的优化及平差的方法技巧摘要:对影响GPS基线解算质量的主要因素进行分析和研究,结合实例阐明基于南方GPS后处理软件的GPS基线解算的优化技术和方法。
以及对GPS 解算数据平差处理的方法与技巧。
关键词:GPS基线解算;固定解;浮动解;残差曲线;优化,数据传输、数据分流、观测数据的平滑、滤波、平差计算、同步环、异步环、重复基线。
GPS接收机采集记录的是GPS接收机天线至卫星的伪距、载波相位和卫星星历等数据。
GPS数据处理就是从原始观测值出发得到最终的测量定位成果,其数据处理过程大致可划分为数据传输、格式转换(可选)、基线解算和网平差以及GPS网与地面网联合平差等四个阶段。
GPS测量数据处理的流程如图所示。
GPS测量数据处理流程一、引言根据GPS外业观测和基线数据处理的实际情况,即使通过选取恰当的点位来保证良好的观测条件,进行星历预报来保证观测到的卫星数目及星座的图形强度,但在实际的基线解算过程中,时常会遇到基线只有浮动解而无固定解。
在此情况下,对基线解算进行优化处理后通常能够得到固定解,从而提高基线质量,避免或减少返工重测现象。
二、影响GPS基线解算结果的几个因素及其对策影响GPS基线解算质量的因素较多也较为复杂,如卫星的周跳、星历误差、对流层及电离层影响、多路径误差、无线电干扰、不明因素影响及起算点误差过大等都会影响基线解算。
应对措施1基线起点坐标不准确的应对方法要解决基线起点坐标不准确的问题,可以在进行基线解算时,使用坐标准确度较高的点作为基线解算的起点,较为准确的起点坐标可以通过进行较长时间的单点定位或通过与WGS-84坐标较准确的点联测得到;也可以采用在进行整网的基线解算时,所有基线起点的坐标均由一个点坐标衍生而来,使得基线结果均具有某一系统偏差,然后,再在GPS网平差处理时,引入系统参数的方法加以解决。
2卫星观测时间短的应对方法卫星整周模糊度难以确定的影响。
由于个别或少数卫星观测时间太短,而导致这些卫星的整周模糊度难以准确确定。
南方NRS系统平台软件功能介绍

南方NRS系统平台软件功能介绍1、系统兼容性1.1兼容国内外主流品牌的基准站型GNSS接收机及主流品牌移动终端接收机功能截图展示:NRS软件支持接入主流GNSS品牌的北斗卫星导航定位基准站接收机。
图1.1 支持接入主流品牌GNSS基准站接收机1.2兼容国内外主流品牌移动终端接收机功能截图展示:NRS软件支持接入主流GNSS品牌移动终端接收机接入差分数据。
图1.2 支持接入主流品牌GNSS移动站接收机2、运算能力2.1NRS系统软件具备GPS、GLONASS和BDS数据的联合解算能力,并支持GALILEO系统;具备单BDS系统、单GPS系统解算能力;具备联合发布GPS、GLONASSS、BDS差分数据;分布单独播发GPS、BDS(B1\B2\B3全频段)差分数据能力。
功能截图展示:NRS系列软件具备GPS、GLONASS和BDS数据的联合解算能力,支持GALILEO系统;具备单BDS系统、单GPS系统解算能力;具备联合发布GPS、GLONASSS、BDS差分数据;分布单独播发GPS、BDS差分数据能力。
图2.1 卫星跟踪状况图注:其中G代表GPS,R代表GLONASS,E代表GALILEO,C代表BDS(北斗)图2.2 基线解算情况注:三角形G5-R5-E3-C9为网内解算后可用卫星数其中G代表GPS,R代表GLONASS,E 代表GALILEO,C代表BDS(北斗)图2.3 三星解算(GPS/GLONASS/BDS卫星可选,自由组合)图2.4 自由组合差分数据包含的卫星系统2.2定时自动解算基站点坐标功能,分析基站稳定性。
功能截图展示:南方NRS系统NET软件具备定时自动解算基准站点坐标功能,并通过CORS运维管理平台展示基站稳定性。
图2.5 基站稳定性分析功能3、预警功能具有邮件、手机短信报警功能,报警信息包括基准站接收机开始或者停止使用内置电池、内置电池电量过低、工作温度过高或者过低、数据传输中断、基站位移变化、基准站接收机更换等内容。
GPS静态数据解算(自己整理版详细流程)

汇 报 人: 日 期:2019.6.29
1 PART
GPS静态测量及基线解算
2 PART
曲线要素输入
3 PART
坐标转换
GPS静态观测及基பைடு நூலகம்解算
1、静态GPS原理
静态相对定位是在WGS-84坐标系中,利用载波相位确定 观测站与某一地面参考点之间的相对位置,或两测站之间的相对位置。 也就是我们通常所说的静态测量。测量时必须使用两台或两台以上的 接收机分别摆在不同的测站上,两两测站之间至少要有4颗共同卫星, 同步做一定时间的静止观测。其精度经静态后处理软件处理后可达到 仪器标识的精度(一般在GPS接收机机头上有说明)
一2、、网网形形设设计计
(1) 选点与埋设 在选点时应遵循以下原则: 1)点位周围应便于安置接收设备,视野开阔视场内障碍物的高度角不宜超过15°。 2)点位应远离大功率无线电发射源(如电视台、电台微波站等)及电压输电线和微波无线电信号 传送通道,以避免周围磁场对GPS信号的干扰; 3)点位周围不应有强烈反射卫星信号的物体(如大型建筑物等); 4)点位应选在交通方便,并有利于用其他测量手段扩展和联测,以提高作业效率; 5)点位应选在地面基础稳固的地方,以利于点位的保存; 6)点位的埋设宜用混凝土现场浇筑的形式埋设为不锈钢标志,埋深应在当地永久冻土层以下0.3 米,桩面注记字体应朝向正北。
(4)设计网形 布设GPS控制网的观测作业方式主要以下几种:点连式、边连式、网连式和混连 式:
3、外业施侧
(1)、观测计划 GPS卫星的可见性图及最佳观测时间的选择 采用的接收机类型和数量 观测区的划分 运输 通信等
(2)野外观测 在外业观测中,仪器操作人员应注意以下事项: 1、 当确认外接电源电缆及天线等各项连接完全无误后,方可接通电源,启动接收机。 2、 一个时段观测过程中,不允许进行以下操作:关闭又重新启动; 改变卫星高度角设置;改变天线位 置;改变数据采样间隔。 3、在观测过程中要特别注意供电情况。 4、仪器高一定要按规定始、末各量测一次,并及时输入仪器及记入测量手簿之中。 5、接收机在观测过程中不要靠近接收机使用对讲机、玩手机。 6、观测过程中要随时查看仪器内存或硬盘容量,每日观测结束后,应及时将数据转存至计算机硬、软 盘上,确保观测数据不丢失。
影响GPS基线解算结果的因素分析及应对措施
国土资源(2008年增刊1)134文★大连鹏程工程勘测设计有限公司 熊启生中国人民解放军65015部队 张坤鹏 王智超PS静态定位在测量中主要用于测定各种用途的控制点。
其中较为常见的方面是利用GPS建立各种类型和等级的控制网,在这些方面GPS技术已基本上取代了常规的测量方法,成为了主要手段。
较之于常规方法,GPS在布设控制网方面具有测量精度高;选点灵活、不需要造标、费用低;全天侯作业;观测时间短;操作简便等优点。
基线解算是GPS网观测数据处理过程的重要环节,基线解算质量的好坏直接关系到各条基线的观测精度,从而影响整个控制网的精度。
因此基线解算质量控制以及基线解算过程中数据的处理方法是整个控制网数据处理的关键点。
本文结合GPS定位原理和实际经验,在南方GPS静态处理软件中对于GPS基线解算阶段需要解决的一些关键问题进行论述。
影响GPS基线解算结果的因素影响GPS基线解算结果因素的判别1.基线解算时所设定的起点坐标不准确。
起点坐标不准确,会导致基线出现尺度和方向上的偏差。
2.少数卫星的观测时间太短,导致这些卫星的整周未知数无法准确确定。
当卫星的观测时间太短时,会导致与该颗卫星有关的整周未知数无法准确确定,而对于基线解算来讲,参与计算的卫星,如果与其相关的整周未知数没有准确确定的话,就将影响该条基线解算的精度。
3.在整个观测时段里,有个别时间段里周跳太多,致使周跳修复不完善。
4.在观测时段内,多路径效应比较严重,观测值的改正数普遍较大。
5.多路径效应严重、对流层或电离层折射影响过大。
1.基线起点坐标不准确的判别。
对于由起点坐标不准确所对基线解算质量造成的影响,目前还没有较容易的方法来加以判别,因此,在实际工作中,只有尽量提高起点坐标的准确度,以避免这种情况的发生。
2.卫星观测时间短的判别。
关于卫星观测时间太短这类问题的判断比较简单,只要查看观测数据的记录文件中有关对与每个卫星的观测数据的数量就可以了,南方静态数据处理软件还输出卫星的可见性图(如图1),这就更直观了。
南方GPS数据处理软件基线解算分析
南方GPS数据处理软件基线解算分析南方GPS后处理软件是GPS后处理常用的一种软件,适用于单频、双频GPS 数据基线解算,平差处理。
该软件包的功能有:选星计划、接收机设置、数据传输、基线向量处理、网平差、质量分析、坐标转换、报表生成、结果输出、Rinex格式转换等模块。
south软件在使用过程中,如何提高基线解算精度是后续解算环节的关键,基线的解算成果直接影响到接下来的对观测点的三维平差、二维平差以及高程拟合的精度,再此就基线解算谈谈个人见解。
标签:GPS;数据处理;基线解算;方差比1南方GPS数据处理软件的安装和数据传输1.1安装南方GPS数据处理软件4.0软件南方GPS数据处理软件4.0软件安装文件中有名为GPSmax050823.exe的可执行文件,执行该文件可弹出安装界面,根据界面提示进行安装。
1.2南方静态数据传输Ver3.0 2006.07.26的基本操作在数据传输前,在接收机和计算机都关机的状态下,用数据线连接,完成连接后运行南方GPS数据处理软件4.0,单击工具→南方接收机数据下载,进入选择界面,对二者的通讯参数进行设置,并确认数据保存位置后,开始传输数据。
选择对应的文件后,鼠标单击“开始”9600 上的数据就会传输到计算机对应的目录下。
在该界面下,如果之前GPS外业测量过程中如果点名、天线高输入不准确,可以在传输数据时对点名、天线高和时段号进行更改。
注意,输入点名必须为四个字母或数字组成。
数据传输完毕后,断开连接,也要二者关机后,才能取下数据线,否则容易损坏数据线接口。
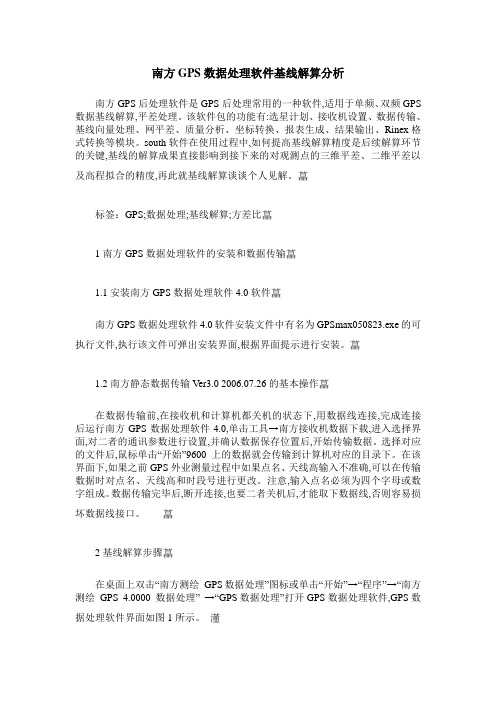
2基线解算步骤在桌面上双击“南方测绘GPS数据处理”图标或单击“开始”→“程序”→“南方测绘GPS 4.0000 数据处理” →“GPS数据处理”打开GPS数据处理软件,GPS数据处理软件界面如图1所示。
2.1新建项目,在菜单栏单击“文件”→“新建”或在工具栏单击按钮打开如下图2所示界面在上述界面中依次填入后,点击设置,进入控制网等级设置,选择所做GPS控制网等级,点击定义坐标系,进入后,选择相适应的坐标系,如果是独立坐标系,可以选择自定义坐标系。
GPS导航定位原理以及定位解算算法
GPS导航定位原理以及定位解算算法全球定位系统(GPS)是一种基于卫星导航的定位技术。
其基本原理是通过接收来自卫星系统的信号,并利用这些信号的时间差来计算接收器与卫星之间的距离,进而确定接收器的位置。
GPS定位原理:1.卫星信号发射:GPS系统由一组运行在地球轨道上的卫星组成。
这些卫星通过周期性地广播信号来与地面上的GPS接收器进行通信。
2.接收器接收信号:GPS接收器接收来自卫星的信号,一般至少需要接收到4颗卫星的信号才能进行定位。
3.信号延迟计算:GPS接收器通过测量信号从卫星发射到接收器接收的时间来计算信号的传播延迟,然后将延迟转换为距离。
4.距离计算:GPS接收器通过比较接收的信号与预先知道的卫星发射信号之间的时间差,进而计算出接收器与卫星之间的距离。
5.定位解算:通过同时计算接收器与多颗卫星之间的距离,可以确定接收器所在的位置。
这一过程通常使用三角测量或者多路径等算法来完成。
GPS定位解算算法:1.平面三角测量:这是一种常用的定位解算算法。
通过测量接收器与至少三颗卫星之间的距离,可以得到三个方程,从而确定接收器的位置。
2.弧长法:这一算法通过测量接收器与至少四颗卫星之间的距离,将每个卫星看作是一个弧线,然后通过计算不同卫星间弧线的交点来确定接收器的位置。
3.最小二乘法:这种算法将测量误差最小化,通过最小二乘法来计算接收器与卫星之间的距离和接收器的位置。
4.系统解算:该算法利用多个时间点上的观测数据,通过组合计算来减小误差,精确确定接收器的位置。
GPS定位解算算法根据具体的应用场景和精度要求有所不同,不同的算法有着各自的优缺点。
在实际应用中,通常结合多种算法进行定位,以提高精度。
同时,还可以通过使用差分GPS(DGPS)来消除大气延迟和接收器误差,进一步提高定位精度。
总结:GPS导航定位原理基于卫星信号的接收和测量,通过计算信号传播的时间差来确定接收器与卫星之间的距离,并通过不同的算法进行定位解算。
GPS导航定位原理以及定位解算算法

G P S导航定位原理以及定位解算算法TYYGROUP system office room 【TYYUA16H-TYY-TYYYUA8Q8-GPS导航定位原理以及定位解算算法全球定位系统(GPS)是英文Global Positioning System的字头缩写词的简称。
它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。
它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。
GPS用户部分的核心是GPS接收机。
其主要由基带信号处理和导航解算两部分组成。
其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导航数据解码等工作。
导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算,并将其从伪距中消除;根据上述结果进行接收机PVT(位置、速度、时间)的解算;对各精度因子(DOP)进行实时计算和监测以确定定位解的精度。
本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。
本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。
1 地球坐标系简述要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相对于地球而言的。
因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动的坐标系、即地球坐标系作为参照系。
地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。
地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ 构成右手坐标系(即指向东经90度方向)。
GPS差分定位原理与解算方法介绍

GPS差分定位原理与解算方法介绍导语:全球定位系统(Global Positioning System,简称GPS)已经成为现代社会中不可或缺的一部分。
它的差分定位原理和解算方法是GPS定位精度提高的重要手段。
本文将从基本原理、差分定位方法和解算流程三个方面进行介绍,希望能带给读者更深入的了解。
一、GPS差分定位的基本原理GPS差分定位技术主要通过消除卫星信号传输过程中的时间延迟和误差,提高定位的精度。
其基本原理如下:1.1 卫星信号传输的时间延迟在GPS定位过程中,卫星信号需要经过大气层的传输。
然而,大气层中存在电离层和对流层等不均匀介质,会导致信号的传输速度和路径发生变化,从而引起时间延迟。
这种时间延迟是影响GPS定位精度的主要因素之一。
1.2 接收机和卫星钟差接收机和卫星钟差也会对GPS定位的精度产生影响。
接收机钟差是指接收机内部时钟的不准确性,而卫星钟差是指卫星内部时钟的不准确性。
误差累积后,会使GPS定位出现较大的误差。
二、GPS差分定位的方法GPS差分定位的方法有静态差分定位和动态差分定位两种。
2.1 静态差分定位静态差分定位主要适用于定位场景相对固定的情况,如建筑物测量和基础设施监测等。
它的工作原理是通过一个称为参考站(Reference Station)的固定GPS接收机对已知位置进行定位,并计算多普勒、钟差和大气层延迟等误差参数。
然后,通过无线通信将这些参数传输给移动接收机,移动接收机利用这些参数进行定位。
2.2 动态差分定位相对于静态差分定位,动态差分定位更适用于移动环境中的定位,如汽车导航和船舶定位等。
动态差分定位的关键是实时计算接收机位置的误差参数,并将其发送给移动接收机进行定位。
通常,这种方法需要两个或更多的接收机组成一个虚拟基线,并使用这些接收机之间的数据进行定位。
三、GPS差分定位的解算流程GPS差分定位的解算流程包括差分基准站的建立、测量数据的采集和处理。
3.1 差分基准站的建立差分基准站是差分定位的核心组成部分,它记录了精确的位置和时间信息,并对卫星信号进行实时观测和处理。
GPSPro 数据解算步骤
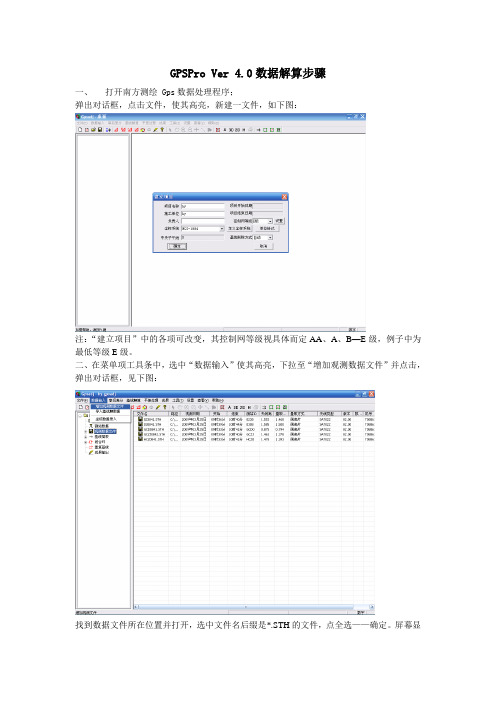
GPSPro Ver 4.0数据解算步骤
一、打开南方测绘 Gps数据处理程序;
弹出对话框,点击文件,使其高亮,新建一文件,如下图:
注:“建立项目”中的各项可改变,其控制网等级视具体而定AA、A、B—E级,例子中为最低等级E级。
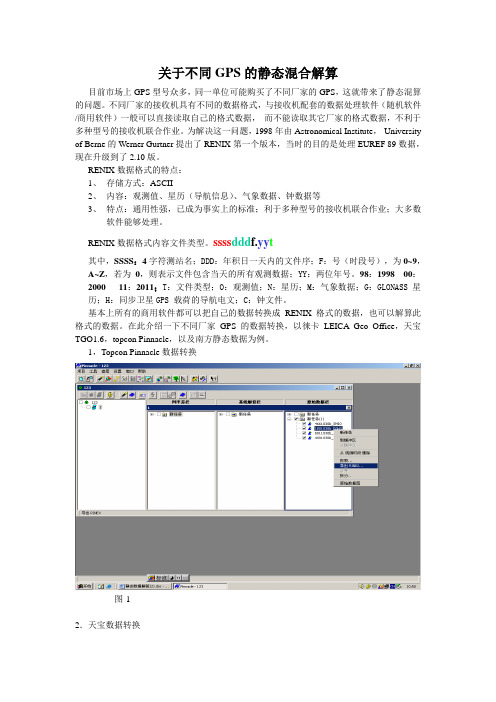
二、在菜单项工具条中,选中“数据输入”使其高亮,下拉至“增加观测数据文件”并点击,弹出对话框,见下图:
找到数据文件所在位置并打开,选中文件名后缀是*.STH的文件,点全选——确定。
屏幕显
示如图:
三、增加数据文件后,显示如下图:网图显示、测站数据、观测数据文件、基线简表、闭合环、重复基线、成果输出。
在对话框里,点相应栏,输入天线高、量取方式等。
见下图
处理完成。
五、运算完后,再返回到主菜单里,选择平差处理,下拉对话框,选中“自动处理”,见下图
自动处理完成后,返回到主菜单,点击“平差处理项”,下拉对话框,选“三维平差”,平差计算完成后,就可看到结果,后处理程序结束。
不同GPS的静态混合解算
关于不同GPS的静态混合解算目前市场上GPS型号众多,同一单位可能购买了不同厂家的GPS,这就带来了静态混算的问题。
不同厂家的接收机具有不同的数据格式,与接收机配套的数据处理软件(随机软件/商用软件)一般可以直接读取自己的格式数据,而不能读取其它厂家的格式数据,不利于多种型号的接收机联合作业。
为解决这一问题,1998年由Astronomical Institute,University of Berne的Werner Gurtner提出了RENIX第一个版本,当时的目的是处理EUREF 89数据,现在升级到了2.10版。
RENIX数据格式的特点:1、存储方式:ASCII2、内容:观测值、星历(导航信息)、气象数据、钟数据等3、特点:通用性强,已成为事实上的标准;利于多种型号的接收机联合作业;大多数软件能够处理。
RENIX数据格式内容文件类型。
ssss ddd f.yy t其中,SSSS:4字符测站名;DDD:年积日一天内的文件序;F:号(时段号),为0~9,A~Z,若为0,则表示文件包含当天的所有观测数据;YY:两位年号。
98:199800:200011:2011;T:文件类型;O:观测值;N:星历;M:气象数据;G:GLONASS星历;H:同步卫星GPS 载荷的导航电文;C:钟文件。
基本上所有的商用软件都可以把自己的数据转换成RENIX格式的数据,也可以解算此格式的数据。
在此介绍一下不同厂家GPS的数据转换,以徕卡LEICA Geo Office,天宝TGO1.6,topcon Pinnacle,以及南方静态数据为例。
1,Topcon Pinnacle数据转换图-12.天宝数据转换图-23、徕卡LEICA Geo Office图-3这几款软件转换数据时的注意事项:1、天线高的量取2、点名的更改天线高要求转换到相位中心,前缀要求前四位是点名如图-2点名为opki大部分软件对于解算自己的数据都可以,徕卡的LGO静态解算功能要单独购买,其他几款都可以免费获得。
GPS静态数据处理
解算基线详解 选择解算全部基线,有自动计算进度条显示如下图47所示
图 47 处理进度
这一解算过程可能等待时间较长,处理过程若想中 断,请点击停止。基线处理完全结束后,网图如下图, 颜色已由原来的绿色变成红色或灰色。基线双差固定 解方差比大于 3 的基线变红(软件默认值 3),小于 3 的基线颜色变灰色。灰色基线方差比过低,可以进行 重解
图45 加入外业观测数据文件对话框 选择路径中选中存放GPS外业数据文件的文件夹,然后在文件列表 中选中所需要的数据文件,然后单击确定。
然后稍等片刻,调入完毕后,网图如下图 3-5 所示:
5、
数据选择系列中的条件是对基线进行重解的重要条件。可以对高 度截至角和历元间隔进行组合设置完成基线的重新解算以提高基线的 方差比。 “合格解选择”为设置基线解的方法。分别有“双差固定解”、 “双差浮点解”、“三差解”三种,默认设置为双差固定解,为最好 的解算精度。
图41 南方GPS数据处理界面
如果该处理软件为演示版,则必须要求注册,注册 方法为单击“帮助”→“注册”打开如下图42所示界 面。
图42
南方GPS数据处理软件注册界面
在使用单位中任意输入使用单位名称,E-mail中输入电子邮箱,电 子邮箱格式必须正确,在注册码中任意输入16位长的数字或英语字母。 如果注册功能栏出现“Sth 解算”字样后,单击“退出”按钮即可完 成注册。
平差处理:进行整网无约束平差和已知点联合平差。根据以下步骤依 次处理。 (1)自动处理:基线处理完后点此菜单,软件将会自动选择合格基 线组网,进行环闭合差。 (2)三维平差:进行 WGS-84 坐标系下的自由网平差。 (3)二维平差:把已知点坐标带入网中进行整网约束二维平差。但 要注意的是,当已知点 的点位误差太大时,软件会提示如图 54 所示 。在此时点击“二维平差”是不能进行计 算的。用户需要对已知数据进行检合。
GPS测量数据处理中的基线解算与坐标转换方法
GPS测量数据处理中的基线解算与坐标转换方法GPS(全球定位系统)是一种使用卫星技术进行地理测量和定位的先进工具。
在实际的测绘和测量工作中,GPS测量数据处理是一个重要的环节。
其中,基线解算与坐标转换方法是其中的核心内容之一。
基线解算是指根据通过GPS观测得到的卫星观测数据,计算出两个或多个测站之间的距离和方向的过程。
对于两个测站之间的基线,首先需要解算出基线长度,即测站之间的直线距离。
然后,根据相同的基线长度,可以得到基线的坐标方向。
基线解算方法主要有静态基线解算、动态基线解算和RTK(实时动态差分)基线解算。
静态基线解算是利用长时间内(通常为几个小时到一天)的GPS观测数据,通过一些统计学方法计算出基线的精度。
这种方法适用于不需要实时性的测量任务,例如大范围的地形测量和控制网的建立。
静态基线解算的优点是计算结果精度高,但缺点是耗时较长。
动态基线解算是利用运动中的GPS接收机,通过较短时间内的观测数据,计算出基线的精度。
这种方法适用于需要实时性的测量任务,例如航空和航海等应用。
动态基线解算的优点是计算速度快,但相对于静态基线解算,精度稍低。
RTK(实时动态差分)基线解算是一种利用两个或多个接收机之间的无线电链路,进行实时差分校正的方法。
这种方法适用于需要高精度和实时性的测量任务,例如建筑物和道路测量。
RTK基线解算的优点是计算精度高且实时性强,但缺点是对设备的要求较高。
坐标转换是指将GPS观测得到的坐标转换为地理坐标系统或工程坐标系统中的相应坐标的过程。
常用的坐标转换方法有七参数法、四参数法和三参数法等。
七参数法是指通过观测得到的七个参数,包括三个旋转参数、三个平移参数和一个尺度参数,来实现坐标转换的方法。
这种方法适用于大范围的坐标转换,例如全球定位系统和国家坐标系之间的转换。
七参数法的优点是转换精度高,但缺点是计算复杂。
四参数法是指通过观测得到的四个参数,包括两个平移参数和两个尺度参数,来实现坐标转换的方法。
GPS高精度解算软件
GPS高精度解算软件GPS高精度解算软件(Inertial Explorer,GNSS+INS事后组合处理软件)是NovAtel公司Waypoint产品组研发的强大的、可配置度高的事后处理软件,用于处理所有可用的GNSS、INS数据,提供高精度组合导航信息,包括位置、速度和姿态信息。
针对精度和稳定性要求比较高,不需要实时定位导航信息的应用,可以通过GNSS和INS原始数据后处理的方式,提高组合导航解算精度和稳定性。
产品优势高精度解算基于 NovAtel 硬件平台,能够实现厘米级定位精度、千分之一级别测姿精度。
松/紧耦合处理提供松耦合、紧耦合两种组合解算方式,灵活性强。
兼容多种数据兼容Honeywell、iMAR、Inertial Science、Litton、Motion Pack、NovAtel、Tamagawa 等多种 IMU 的数据格式,提供自定义 IMU 数据格式功能;同时兼容 NovAtel、Trimble、JAVAD、Leica、NAVCOM、Septentrio 等多种 GNSS 数据输入。
长距离 RTK 和精密单点定位 (PPP)支持长距离(可达几百公里)RTK 解算,也可自动下载精密星历实现精密单点定位。
支持航拍数据处理能够通过外部信息处理相机和 IMU 的方向偏差 w-p-k角度,识别相机触发的数据点。
支持零速修正(ZUPT)利用载体静止时惯性导航系统的速度输出作为系统速度误差的观测量,修正其他信息。
动基线处理动基线处理模块可以通过后处理的方式对运动中的基准站和移动站之间的基线进行高精度的数据处理,实现厘米级解算精度。
输入和输出范围Inertial Explorer可以方便地将NovAtel的SPAN® GNSS/INS系统数据导入进行处理。
该软件具有一个通用的IMU数据导入模块,可以导入多种接收机的GNSS数据。
数据处理完成后,可以以多种格式输出。
可配置的输出向导允许可定制的ASCII码输出。
南方数据处理软件操作流程
图1 新建工程
4
南方数据处理软件操作流程
(2)增加野外观测数据
在菜单栏单击“数据输入”下的“增加观测数据文件”,如 图2所示。选择路径中选中存放GPS外业数据文件的文件夹,然后 在文件列表中选中所需要的数据文件,再点击确定即可完成观测 数据录入。
图2 增加野外观测数据
5
南方数据处理软件操作流程
(3)GPS基线处理
11
南方数据处理软件操作流程
12
图5 处理合格的网形图
南方数据处理软件操作流程
(4)对整网进行约束平差
① 数据录入:输入已知点坐标,给定约束条件。 ② 平差处理:进行整网无约束平差和已知点联合平差。根据以下 步骤依次处理。 a. 自动处理:基线处理完后点此菜单,软件将会自动选择合格基线 组网,进行环闭合差。 本次数据环闭合差报告中:闭合环最大节点数为3,闭合环总数为 23,同步环总数为10,异步环总数为13, 超限闭合环数为0,闭合 差最大值为0.0582,闭合差最小值为 0.0016,相对 闭合差最大值为 3.01ppm,相对闭合差最小值为0.13ppm。
10
南方数据处理软件操作流程
b. 点击基线列表,查看基线解算残差,将残差偏大的卫星进 行屏蔽后再解算此基线。 c. 双击当前基线调节天线截止角和历元间隔,再点击解算, 方差比大于3即为合格,但在调整的过程中,可能会出现很多的 组合方案和以之相对应的方差比,一般来说方差比越大,解算 效果越好。同时,在顾及方差比的同时,也要考虑图3中的X、 Y、Z增量的大小,顾忌二者,选取最优化的结果。 d. 当操作以上几步都不合格,要么删除禁用此不合格基线, 或重测。
8
南方数据处理软件操作流程
9
图4 删除周跳
南方数据处理软件操作流程
南方测绘gps数据处理软件v41.5操作说明

GPS解算步骤
一、转换数据格式
打开中海达
导入数据,然后进行静态处理设置
处理全部基线,然后进行删星删数据处理
GPS 解算步骤
1、转换数据格式
首先新建项目,然后建立坐标系统,将GPS观测数据导入南方软件,在观测数据中修改仪器高及量取方式,最后数据输出,转换为rinex格式(在这一步前,应先建立新文件夹)
转换数据的目的是有便于中海达解算。
打开中海达
改变o文件的仪器高,打开中海达,新建项目,在项目属性中修改椭球参数和坐标系统及网的等级
导入数据,然后进行静态处理设置
处理全部基线,然后进行删星删数据处理
网平差,平差设置,进行三维平差,查看参考因子,然后再进行平差设
置,输入参考因子,然后进行三维平差,通过的话,完了输入已知点坐标,然后进行平差设置在进行二维平差。
南方静态GPS数据解算过程
静态数据处理流程
(处理前)准备工作,将数据线连好静态机,在静态机关机状态下连上电脑,电脑弹出发现并安装新硬件,安装好后在H盘复制出当天数据。
并将数据重命名。
注意,名称有8位数,前四位是仪器编号的尾四位,根据记录的时间和观测时段不同分别将数据名称前四位更改为测站点名。
比如G001点对应的数据是11051531.sth 则将其名称更改为G0011531.(点名在设计时候要设计为四位,不足四位用代码或字母或0来补足。
)
安装好软件,点击帮助→软件注册→输入你的公司名称→在注册码栏按任意字符直到注册成功。
新建工程:点击文件→新建→选择好对应的坐标系统→和控制网等级→确定(此步骤点击设置可以看到不同等级控制网对应的平均边长不同可以根据你的边长选择合适的等级,也可以根据需要的等级来设
计你的边长)
导入数据:点击数据输入→增加观测数据文件→找到你拷出来并重命名好的数据文件夹→点击全选→确定
改天线高:点击左边框中的观测数据文件→找到右边的量取的天线高→双击修改→按照观测时记录的数据修改。
基线解算:点击基线解算→全部解算(点击左边网图显示可以看到解算过程)→全部解算完毕→OK
输已知点:点击数据输入→坐标数据录入→点击请选择→选择已知点并输入该点的正确坐标→全部输入完毕后点击确定。
平差处理:点击平差处理→自动处理→三维平差→二维平差→高程拟合。
打印成果:点击成果→平差报告打印。
GPS实验三GPS基线解算

数据格式转换
02
将原始数据格式转换为基线解算软件可识别的格式。
数据筛选与预处理
03
剔除异常数据,进行必要的坐标转换和时间对齐等预处理操作。
基线解算设置与执行
1 2
参数设置
设置基线解算所需的参数,如卫星轨道、地球模 型、时间系统等。
执行基线解算
利用基线解算软件进行数据处理,求解基线向量。
3
输出结果
将基线解算结果输出为所需的格式,如RINEX格 式。
实验结论与讨论
结论
通过本次GPS基线解算实验,我们成功得到了基线的长度和坐标差值,测量精度较高, 验证了GPS技术在测量领域的应用价值。
讨论
为了进一步提高测量精度,可以考虑采用更高精度的GPS接收器,优化数据处理算法, 以及加强信号传播过程中的干扰抑制措施。此外,还可以通过多次测量取平均值的方法
减小误差。
GpsDataPro软件应用实例
某城市高精度地形测量项目
利用GpsDataPro软件对大量GPS观测数据进行处理,得到高精度的地形图。
某桥梁施工监测项目
在桥梁施工过程中,利用GpsDataPro软件对桥梁进行实时监测,确保施工安全。
04
GPS基线解算实验步骤
数据准备与预处理
数据收集
01
收集相关GPS数据,包括卫星观测数据、接收机位置数据等。
高精度数据处理
随着数据获取技术的不断发展,未来需要更加高 效和高精度的数据处理方法,以满足更高精度的 测量和定位需求。
人工智能与机器学习应用
人工智能和机器学习技术在数据处理和分析中具 有巨大的潜力,未来将进一步探索其在GPS基线 解算中的应用,提高数据处理效率和精度。
THANKS
南方GPS静态解算操作步骤
静态数据处理:
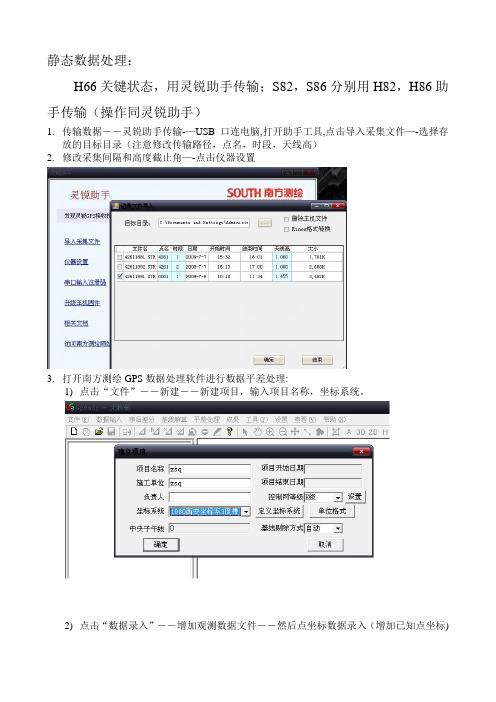
H66关键状态,用灵锐助手传输;S82,S86分别用H82,H86助手传输(操作同灵锐助手)
1.传输数据――灵锐助手传输-—USB口连电脑,打开助手工具,点击导入采集文件—-选择存
放的目标目录(注意修改传输路径,点名,时段,天线高)
2.修改采集间隔和高度截止角—-点击仪器设置
3.打开南方测绘GPS数据处理软件进行数据平差处理:
1)点击“文件”――新建――新建项目,输入项目名称,坐标系统。
2)点击“数据录入”――增加观测数据文件――然后点坐标数据录入(增加已知点坐标)
3)点击坐标菜单栏“观测数据文件"――进行数据编辑――选种数据点鼠标右键键――剔
除断断续续数据.如下图
4)基线解算――全部解算――处理不合格的基线为灰色,合格的红色,在网图上双击不合格的基线,弹出下面窗口,调高或调低高度截止角和历元间隔,再解算,直到方差比大于3。
4)基线处理合格后,点击平差处理――平差参数设置――将二位平差选择下方方框的勾
去掉――依次点击按钮――A――3D—2D—H(分别为:自动处理,三维平差,二维平差,高程拟合)
5)成果输出:
平差报告(文本文档);可选择输出需要的内容
网平差成果:输出word文档。
平差过程中注意实时保存。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
改变高度截止角
同步观测时间较长,观测卫星较多、 GDOP较小,根据点位环视图有障碍, 增加高度截止角解算;
若同步观测时间短,软件默认解算条 件下观测卫星不足,GDOP较大,点 位环视条件好时可降低高度截止角解 算。
禁用无效历元
参考基线解算报表,对于卫星的健康 状况恶劣,卫星信号经常失锁,整周 模糊度搜索失败,禁用无效历元,同 时注意同一时段观测值的数据剔除率 小于数据总量的10℅。顾及时段中信 号间断引起的数据剔除、劣质观测数 据的发现及剔除、星座变化引起的整 周未知参数的增加等,重新解算。
φ c= φ 1.f1^2/(f1^2-f2^2)-φ 2.f1.f2/(f1^2-f2^2) =2.54573φ 1-1.98368Φ 2 φ c2=(△φ + Σ φ )/2 △φ =nφ 1+m φ 2= φ 1- φ 2 Σ φ =nφ 1+mφ 2= φ 1+ φ 2
*消除电离层折射,但无整数解.
野外返工
对经过检核以及综合分析各种客观因素基础上 超限的基线,进行野外返工。由于控制面积大、 交通不便等因素应分步考虑返工:①无论何种 原因造成一个控制点不能与两条合格独立基线 相连结,则纳入第二天观测计划,适当调整观 测网形补测或重测不少于一条独立基线。②对 舍弃(在复测基线边长较差、同步环闭合差、 独立环闭合差检验中超限的)基线后的独立环 所含基线数超过10时;由于点位不符合GPS测 量要求而造成一个测站多次重测仍不能满足各 项限差技术规定时。在整网观测完后重测基线、 有关同步图形或按技术设计要求另增选新点进 行重测。
LC c(dT dt) Dtrop LC N LC
LC
f f 2 1 2 L1 2 2 2 L 2 f1 f 2 f1 f 2
2 2
LC
c 2 2 f1 f 2
N LC f1 N1 f 2 N 2
• 常用的线性组合,合成新的单频载波
L1载波波长:19.02cm *不利于求解模糊度,测量噪声小 L2载波波长:24.42cm *利于求解模糊度,测量噪声大. • 测量精度为2mm左右。 • 残余系统误差对同一时刻两 台GPS接收机到两颗卫星距 离观测值的相关性强。 • 采用载波相位相对差分定位。
在GPS定位中,主要的误差来源于三类,即轨道误差、卫星钟差和电离层 延时。如果采用双频接收机,可以利用LC相位组合,消除电离层延时的影响。 这样,定位误差只有轨道误差和卫星钟差两类。如果能够提供精确的卫星轨 道和卫星钟差,利用观测得到的相位值,就能精确地计算出接收机位置、对 流层延时等信息。 假设LC的观测方程如下:
• 宽巷(Wide lane)观测值△φ:φ1和φ2之差: • • △φ=n φ1+m φ2= φ1- φ2;( n=1,m=-1) • • 频率△f=f1-f2=347.82MHZ; 波长λ △ =c/f △=86.19cm; 模糊度N=N1-N2 • *利于求解模糊度,测量噪声大.
1、在动态定位时,通常用此观测值; 2、辅助确定Iono—free组合观测值的模糊度
ห้องสมุดไป่ตู้
模糊度的求解法
不同方法的优缺点
再见!
1、应用于长基线解算; 2、电离层活跃期或活跃地区的基线解算
改变历元间隔。 采集高质量的载波相位观测值是解决周跳问题的 根本途径,适当增加采集密度是诊断和修复周跳 的重要措施。 对基线同步观测时间较短,可缩小历元间隔,让 更多的数据参与计算; 若基线同步观测时间长,可增加历元间隔,减少 含有质量差数据参与计算; 若数据周跳较多时,可增加历元间隔,使解算时 跳过中断的数据继续解算。 根据点位环视图有障碍,可增大高度截止角、减 少历元间隔。
窄巷(Narrow lane)观测值Σ φ:φ1和φ2之 和: Σ φ=n φ1+m φ2= φ1+ φ2;( n=1,m=1) 频率Σ f=f1+f2=2803.02MHZ; 波长λ Σ =c/f Σ =10.70cm; 模糊度 N=N1+N2 *不利于求解模糊度,测量噪声小
无电离层折射的观测量:
然后对所有解算出合格固定解的基线进行 检核: ①每个时段同步观测数据的检核; ②重复观测边的检核; ③同步观测环检核; ④异步环检核。当发现以上各步检核超过 限差,应分析原因,平差处理后单位权中 误差一般值为0.05周以下;短基线双差实 数解、双差固定解之间的基线向量坐标通 常要求其差小于5cm。