迷宫电脑鼠的硬件设计简介
电脑鼠报告

西南交通大学课程设计微机硬件综合课程设计(课程代码:0473007)年级: 本科2010级姓名: 代雷波(20103190)刘湘(20103194)专业: 网络工程指导老师: 蒋朝根二零一三年五月目录第1章背景和意义 (3)第2章系统方案设计 (4)第3章硬件设计 (5)3.1电脑鼠基本硬件组成 (5)3.2电脑鼠基本动作 (7)第4章软件设计 (9)4.1电脑鼠软件设计概要说明 (9)4.2等高图制作模块 (11)4.3冲刺模块 (12)4.4转弯模块 (12)4.5搜索模块 (13)4.6迷宫地图相对方向与绝对方向的建立 (13)4.7墙壁资料存储 (16)4.8电脑鼠搜索策略 (16)第5章结论 (18)参考文献 (19)附件: (20)第1章背景和意义电脑鼠可看作是一种具有人工智能的小型机器人,依照比赛规则,当电脑鼠放入“迷宫”起点,按下启动键之后,它就必须自行决定搜寻法则并且在迷中前进、转弯、记忆迷宫墙壁资料、计算最短路径、搜寻终点等功能。
电脑鼠结合了机械、电机、电子、控制、光学、程序设计和人工智能等多方面的科技识。
国际电工和电子工程学会(IEEE)每年都要举办一次国际性的电脑鼠走迷宫竞赛。
首场电脑鼠迷宫竞赛1979年于纽约举行,1991年以来,每年都有世界级的比赛。
2007年,国内开始举行IEEE标准电脑鼠走迷宫邀请赛,自举办以来高校参赛踊跃,许多大学还开设了“电脑鼠原理和制作”选修课程。
电脑鼠走迷宫竞赛具有一定难度,是一项富有挑战性和趣味性的比赛。
电脑鼠可看作一个集多项工程学科知识于一体的小型系统,成功的设计者通常都是合作团体。
他们必须考虑电子、电气、机械以及计算机各方面的问题,重量、速度、功耗、传感技术重心以及程序各方面都是设计中需要决定和综合考虑的因素。
电脑鼠结合了多学科知识,对于提升我们的动手能力、团队协作能力和创新能力,促进课堂知识的消化和扩展自身的知识面都非常有帮助;另外成立小组合作参赛,不仅使我们学到了知识,而且加强了同学之间的交流,交际能力语言表达能力等也得到了锻炼和提升;最后电脑鼠走迷宫竞赛极具趣味性,容易得到学生的认同及参与,并能很好的激发和引导学生这方面的兴趣和爱好,为继续参加比赛和深入学习提供了良好的条件。
电脑鼠车型介绍

Micromouse615采用铝制车架,重量轻,散热性能好。
采用双步进电机,车轮直接安装在电机轴上,机械结构简单安装方便。
Micromouse615车身长12cm,宽9cm,短小精悍,可灵活的在迷宫格中完成90度和180度转弯,如下所示。
Micromouse615微处理器采用LM3S615。
LM3S615是美国Luminay公司开发的32位单片机,基于ARM Cortex-M3内核。
LM3S615具有运算速度快,中断响应快,外设丰富等优点,保证了Micromouse615可以具有很高的智商。
另外Luminay公司提供了丰富的函数库,只要懂C就能开发,大大降低了Micromouse615的使用难度。
Micromouse615使用5组红外传感器用于检测迷宫墙壁信息,分别用于检测左、左前、前、右前和右五个方向的墙壁信息。
左前和右前传感器用于调整电脑鼠姿态,使电脑鼠走时行走在迷宫格中心。
使用5组可调电阻控制红外信号发射强度,调整可见距离。
信号采用载波调制,增强抗干扰性。
Micromouse615采用双步进电机驱动。
使用步进电机不需要减速装置等,可简化机械结构。
步进电机控制简单,运行平稳。
Micromouse615板上一个按键,一个复位按键和一个10针JTAG调试接口,并预留了一个6个JPIO、一个串口和一个SPI接口,方便扩展。
在配套光盘中配有一个能够用于参赛的程序,可稳定而快速的完成竞赛。
Micromouse615具有高度可扩展性,领用预留的接口可根据需要扩展其他部件,进行硬件升级。
在软件方面,随产品光盘配套有一个走完迷宫的基本例程,可在此基础上进行算法优化和升级,以提升电脑鼠性能。
可改进电机控制算法以提升控制精度,改进搜索算法和解迷宫算法以少走弯路,找到一条最优路径。
电脑鼠算法

1) 迷宫由16×16个﹑18cm×18cm大小的正方形单 元所组成。
2)迷宫的起始单元可选设在迷宫四个角落之中的任 何一个。起始单元必须三面有隔墙,只留一个出口。 5
竞赛主要规则
电脑鼠的基本功能是从起点开始走到终点,这个 过程称为一次“运行”,所花费的时间称为“运行时间 ”。从终点回到起点所花费的时间不计算在运行时间内 。从电脑鼠的第一次激活到每次运行开始,这段期间所 花费的时间称为“迷宫时间”。如果电脑鼠在比赛时需 要手动辅助,这个动作称为“碰触”。竞赛使用这三个 参数,从速度﹑求解迷宫的效率和电脑鼠的可靠性三个 方面来进行评分。
货车类,上渡船有如下规定:
• 客车先于货车上渡船,且每上4辆客车,才允许放一辆货车; • 若等待客车不足4辆,则以货车代替; • 若无货车等待,允许客车都上船。
• 试设计一个算法模拟渡口管理。
16
各阶段所用的算法
17
3) 回溯
• 算法思想:深度优先遍历
• 步骤一:先将根结点作为活结点; • 步骤二:向活结点的子结点扩展,若其存在,子结点作
迷宫电脑鼠算法
重庆理工大学 计算机科学与技术系
1
五大内容:
2
一、电脑鼠简介
电脑鼠是一种具有人工智能的轮式机器人
它是多个学科交叉结合的结晶
3
电脑鼠走迷宫的关键技术
4
二、电脑鼠迷宫竞赛
目的
电脑鼠走迷宫竞赛的目的是制作一个微型机器人, 它能在最短的时间内穿越迷宫到达终点。参赛的机器人 称为“电脑鼠”,将电脑鼠放入迷宫并启动操作的人称 为“操作员”。
6
三、电脑鼠走迷宫演示
7
四、电脑鼠迷宫的设计与算法
电脑鼠走迷宫三个阶段
电脑鼠走迷宫介绍

什么是电脑鼠
电脑鼠集多学科于一身: 是个实实在 在的机器人 电脑鼠需要有众多 信息的反馈,如墙 壁信息等。 控制电脑鼠在迷宫中 快速而准确的行走属 于自动控制技术范畴。
机械 工程 传感 测试 人工 智能 自动 控制 程序 设计 电子 工程
电脑鼠还是一个 嵌入式系统,需 要广泛的涉及信 号处理、通信、 微处理器应用和 电机控制等
电脑鼠走迷宫
1 2
什么是软件操作
4
5
解析智能算法 电脑鼠走迷宫竞赛
第一部分:什么是电脑鼠
什么是电脑鼠?
电脑鼠,英文名micromouse,电脑鼠是使用微控制器﹑传感器 和机电运动部件构成的一种嵌入式微型机器人。它可以在“迷宫” 中自动记忆和选择路径,寻找出口,最终到达所设定的目的地。
电脑鼠走迷宫
电脑鼠可以在不同“迷宫”中自动记忆和选择路径,采用相应的算 法,快速的达到所设定目的地。 早在1956年,美国数学家申龙发明了一个能自动穿越迷宫的“电脑 鼠”,以此证明计算机可以通过学习提高智能。(人工智能初步体 现) 1979年比赛开始正规化,由IEEE与APEC共同主办,诞生了国际上 最有影响力的美国APEC 国际电脑鼠竞赛。号称电脑鼠世界三大赛 事之一。至今已经举办30届。
电脑鼠走迷宫
1980年欧洲、日本相继引入电脑鼠走迷宫竞赛, 1987年新加坡南洋理工第一届IES电脑鼠大赛。 2004年英国伯明翰城市大学主办 UK 大赛 2006年台湾教育部开始重视电脑鼠比赛,欲通过参赛 争夺台湾在国际人工智能领域的地位。 现在电脑鼠比赛发展非常好,实力很强的国家和地区 有美国,日本,新加坡,台湾,英国,韩国和印度等国 家。世界上每年都有高水平的电脑鼠大赛相继举办。为 此有很多大学还开设了“电脑鼠原理与制作”的选修课 程。
电脑鼠的迷宫演算法

班級:四技系統三甲 組員:49839033葉家宏 49839056黃致中 指導老師:黎靖
摘要
•如果把電腦鼠比喻成人來看,那硬體就是四肢, 而軟體就相當於電腦鼠的大腦。在此報告中討論 兩種路徑演算,兩種皆可再細分很多種演算法。
• 區域性演算法
又分為右手法則、左手法則、中左法則、中右法則、 向心法則。
• 演算法則有洪水填充法(Flood-Fill algorithm)及A*演算法與 其諸多的變形演算法等。
選擇你想搜尋的演算法
右手法則
區域性演算法
左手法則 中左法則 中右法則 向心法則
全域性演算法
洪水填充法 A*演算法
右手法則
• 電腦鼠遇到岔路時,以右手為優先,其次直線、左手。
右手法則-迷宮範例
圖11
選擇F值較小的E6為下一步
A*演算法(13/15)
• 全域性演算法
又分為洪水演算法、A*演算法。
區域性演算法
• 應用在探索迷宮的階段。 • 由於迷宮狀態未知,因此只能根據目前電腦鼠週遭的環境, 試著尋找到達終點的路徑。 • 演算法有左手法則、右手法則、中左法則、中右法則及向 心法則等。
全域性演算法
• 應用在已經部份或完全探索迷宮後,此時可以根據已探索 的迷宮資料找到起點至終點的最短路徑。
• 將E2設定為父節點(如圖8), 並將D2從開啟列表中刪除且 加入關閉列表中。計算E2相 鄰節點的F值。 E3 → G=54 H=4*10 F=94 F1 → G=58 H=7*10 F=128 F2 → G=54 H=6*10 F=114 F3 → G=58 H=5*10 F=108 並將其指向父節點。 選擇F值較小的E3為下一步
A*演算法(3/15)
《电脑鼠走迷宫》课件

这份PPT课件将带你深入了解《电脑鼠走迷宫》游戏,让我们一起从玩中学, 从学中玩!
什么是电脑鼠走迷宫
电脑鼠走迷宫是一种刺激有趣的益智游戏,你需要帮助电脑鼠找到迷宫中的 出口,避开障碍物和敌人。挑战智力,展现灵活性!
硬件和软件要求
为了畅玩电脑鼠走迷宫,你需要一台配置适当的计算机,并安装最新版本的 游戏软件。好的硬件和软件可以提供最佳的游戏体验。
游戏目标和规则
你的目标是帮助电脑鼠尽快找到迷宫出口。避开敌人和障碍物,尽可能少走 弯路。游戏规则简单明了,但挑战却不容小觑。
操作指南
使用键盘上的方向键来控制电脑鼠的移动。观察迷宫的地图和敌人的行动, 制定最佳策略,灵活应对情况。
迷宫的各种类型
迷宫可以有各种不同的形状和设计,例如经典的方形迷宫、扭曲的环形迷宫、 令人眼花缭乱的立体迷宫等。每种迷宫都有独特的挑战与乐趣。
常见迷宫难度
迷宫的难度可以根据迷宫的大小和复杂程度来设定。从简单的初级迷宫到复 杂的专家级迷宫,每个等级都会带给你不同的挑战。
如何选择合适的迷宫
选择适合你的挑战水平的迷宫非常重要。根据你的经验和技能,选择一个合适的难度等级,挑战并提高自己的 游戏能力。
迷宫中ቤተ መጻሕፍቲ ባይዱ道具和机关
迷宫中有各种各样的道具和机关,如金币、钥匙、门和传送门等。合理利用 它们能够帮助你更快地通过迷宫。
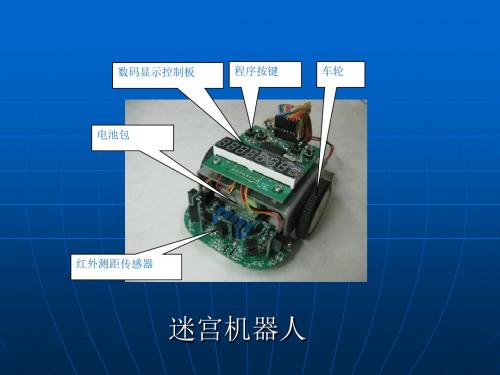
迷宫机器人简介
三、迷宫机器人场地简介
场地整体由木板组装面成,可以通过更改部分隔墙位置来实现场地变更 底板尺寸为1.5*1.5米,由不同长度的隔墙板与底板共同组合而成,每个通 道为168mm,隔墙高50mm,宽12mm 底板为黑色防滑表面,隔墙表面贴白色防火板,顶上贴红色边条
168mm
四、迷宫机器人规则简介
比赛时机器人可以将场地的任一个角作为起点,终点设置在场地正中。 比赛时选手通过程序控制机器人从起点出现,按顺序将场地上的所有通道 全部跑完再回到起点位置,并自动分析刚才所走路线中到达终点的最短路 线,然后沿着最短路线前进到达终区并再次返回起点,以到达目的地所用 的时间最少者为胜
五、迷宫机器人程序说明
◆模块化流程图式编程软件,直观明了 ◆支持流程图或C语言编程,可以直接将流程图转化为C语言 ◆编程模块可自由按横向或纵向对齐,简单方便 ◆模块间的连接线可以自行更改连接,便于不同阶段的用户使用 ◆支持自定义函数的导入
五、迷宫机器人程序说明
功能:初始化电脑鼠硬件,以及清零电脑鼠的记忆内存。 参数:双击设置四个参数,分别为初始X坐标、初始Y坐标、初始方 向、迷宫大小。相应地一般设置为0、0、MazeUP、8。
姿势修正的临界条件数据记录表
传感器 一侧墙壁(靠右) 左 左前 X12 X21 X41 X52 X22 X42 一侧墙壁(靠左) 两侧墙壁(靠右) 两侧墙壁(靠左)
中
右前 右
六、迷宫机器人使用说明
1)两侧都有墙壁时的姿态纠正策略 当两侧都有挡板时,且当电脑鼠处在如图6-1、图6-2所示位置时需要对电脑鼠 姿态进行纠正。其中,图6-1(a)和图6-2(a)分别表示电脑鼠的位置偏离了迷宫 中心(向左)和其姿态偏离了平行于墙壁的方向(向左),可以发现,这时左边 传感器信号强,右边的弱。电脑鼠应当向右转以回到理想的方位和姿态。同样, 图6-1(b)和图6-2(b)分别表示电脑鼠的位置偏离了迷宫中心(向右)和其姿态 偏离了平行于墙壁的方向(向右),这时右边传感器信号强,左边的弱。电脑鼠 应当向左转以回到理想的方位和姿态
电脑鼠走迷宫竞赛ppt教材

电脑鼠 |基于LM3S615微控制器
电脑鼠走迷宫竞赛
• 电脑鼠迷宫竞赛的计分规则说明
启动
迷宫时间
运行时间 返回到起点
迷宫时间:电脑鼠激活到每次运行开始的那段时间 运行时间:电脑鼠从起点走到终点的时间
! 碰成触绩:=电迷脑宫鼠时在间运÷行30过+程运中行若时要间手-动奖辅励助时,间则
为碰触(,非此碰次触运)行将失去 10s的奖励时间。电脑鼠 能从终点自动返回到起点,若要手动放回起点, 也视为“碰触”,按碰触的规则进行处理。
电脑鼠 |基于LM3S615微控制器
电脑鼠的简介
LM3S615 ARM cortex-M3内核
• 功耗低 • 具有门数目少 (价格低) • 调试成本低 • 中断延迟短 • 中断响应快速且支持多级中断嵌套 • 处理器采用先进的ARMv7-M架构
电脑鼠 |基于LM3S615微控制器
• 传感器
– 位置传感器 – 惯性传感器 – 距离传感器
MicroMouse615迷宫电脑鼠
——基于Cortex-M3
1234567
电脑鼠 电脑鼠 电脑鼠 电脑鼠 简介 走迷宫竞赛 走迷宫演示 走迷宫算法
走迷宫 电脑鼠 电脑鼠 标准套件 调试例程 传感器校正
电脑鼠 |基于LM3S615微控制器
电脑鼠的简介
• 电脑鼠是一种具有人工智能的轮式机器人
» 它是多学科的交叉结合的结晶
• 光电接收管
– IRM8601S
• PSD器件
– GP2D12
• CCD • 超声波
电脑鼠的简介
电脑鼠 |基于LM3S615微控制器
• 电机
– 步进电机 – 直流电机
• 减速 • 速度反馈
电脑鼠的简介
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
耗也可降副较低承平。 此外,交换网络及SPCE中的其它元器件也可以选用BiCMOS器件来实
现。BiCMOS逻辑门在逶髂数字部传(翔编鹚器、译诲嚣秘摸/数转羧器等) 和门阵列的应用中极为广泛,因为它的扇出数一般为5~8,如此大的扇出 数意味着具有较强的带负载能力,而且BiCMOS门比CmOS f1能更快速地驱 动这些负载。另矫,BiCMOS fj中的器件尺寸可以怒一致的,这就降低了通 信数字部件在物理设计上的难度;不同的CMOS电路对减小单位负载的舆 惩送往缝不溺,对予BiCMOS电爨,蠹予双稷墅捺捷BJT嚣俘隔开了CMOS 电路的主体与负载,使得不同电路中负载的状况变差都是相同的,这样就 简化了通信和信感处理用数字逻辑部{牛和电路的设计任务,提毫了工作效 寨。
5结论
交换阏络是数字程控交换橇翡关键缝成部分之一,其髋能壹羧影豌着
稷控交换机的技术指标和通话质墩。随着计算机技术、超大规模集成电路
投本、微激子技本鞍半导体存德按零懿进~步发震,震瑟黪麦透静BiCMOS
工艺制作的器件用于程控交换机交换网络的实现将成为现实,这将使通信
成璧褥到可靠的保证,同时将会有越来越多鲍裹毅暹售技术窝电子元器侈
_暾用于交换网络的实现中。目前,已有专用集成电路芯片朋于程羧交换机
按续(典型的如用户电路芯片)。面利用BiCMOs工艺制作稷控交换机内部
的交换弼络元器件,使之集成记并应孺子电信工稷实践中,关于这一方面
的研究和腹用,将是我们今后继续进行的研究方向之一。
参考文献
[1]
叶敏. 糕控数字交换与交换网[M]. 北京:北京邮电学院出版
麓不多是上世纪九十年代),但随着各方面按术的不断完善,特别是微控制器技 术、铸惑器技本、入工智能技术的发鼹,国内黪班嚣入巍赛也褒翅必鲤蒙建开最。 而迷宫鼠竞赛在台湾、香港等发达地区也已缀举办过多次。
3.迷寓■的硬件设计思想 迷宫鬣夔硬黪设谤是一瑗系统瓣工程。‘玄涉及到诲多方裁,毽括微控镧嚣攒 块、马达驱动模块、传感器模块以及备模块间的相互连接。在设计之前,设计者岿 须要对照个电脑鼠的各部分构造有一个大致的了解,由于迷宫是由256块 18cmXl8cm夔单元接缀戒,除去墙体辱度1。2cm,嚣壤淹熬实赫距离兔16.8cm, 因此可以考虑将整个电脑鼠就设计在一块lOcm见方的底板上,以使其能能方 便、灵活地转向。 迷宫鬣戆电路援缕梅分必上下辩层。上瓣隽挖嗣援,其孛镪捂镞控穰器MCU、 传感器检测电路和一些数据存储与连接模块。下层为驱动板,主要包括左右两侧 的车轮、驱动马达、两翼的CNY70光电传感器、万向轮、H桥驱动芯片等。两层之间 经震蠡壤镧柱用予支撑。这样的设诗安簿,栽够燕诧迷富鬣各部分的稳造、继分 备模块的功能,同时也有利于拆装和臼后保养维护。 3.1微控制器模块 徽控稍嚣单元,帮Microcontroller Unit, 或称单片税(Mcu),悬指将中 央处理单元CPU、程序存储嚣ROM、数据存储嚣RAM以及输入输出端口(i/0口)等
应用科技
N●l
迷宫电脑00092)
f摘要】人工智能技术是一门融合了众多学科的新星科学,它被广泛地应用于勘探、侦察、医疗救援、抢险以及日常生活的各个方面。智能机器人竞赛则是~项
旨在开发人工智能技术而举行的比赛,它集科学、娱乐和比赛于_t体,在各国引起了广泛关注和极大兴趣。目前豳际上有很多针对机器人技术的比赛,两IEEE迷宫鼠 竞赛鬻楚其中的一个典羹代表。本文首先辩近年来在国际上迅速开矮的迷宫槐器入竞赛作了简簧介绍,簿要说碉了迷宫鬣竞赛的竞赛规则以及发展历史,同时也分析
【摘 要】随着宇航业及机器人业的飞速发展,出现了越来越多地采用由若干个柔性构件组成的多柔体系统。本文对柔性机械臂研究控制方法进行了分析。希望 本文瓣磺究麓梵翅关领域戆硬究起裂挞砖萼l玉熬终嗣。
【关键词】柔性机械臂方法控制
中圉分类哿:TP
文献标识粥:A
1009-914X(2009)27-0026-02
3、模型辨识的方法 这蕈孛方法可以完全掇拜经典分析力学翡思想,零J用模登辨谖静方法模掇索 性臂的运动特征,得到柔性机械臂的动力学模型。模型辨识的方法较多,可以用 实验的方法,系统辨识的方法等。出于神经网络能镊意逼近非线性函数,因蕊崔 系统建模方蕊鸯着徭大的潜力。俄楚,由于天工粹经瞒络本身还处于发震静除 段,很多理论还不完善,所以,利用神经网络来建立柔性机械臂动力学模型的方 法也不缀成熟。 三、粱幢辊赣鬻羟稠蠢法 柔性机械臂的先进程度和功能强弱通常都直按与其控制系统的性能有关。 特别是掰一代计簿规熬出现与人工智能的发展,绘柔性枧城劈控制技术带来校 其丰富的内容。机械臂的运动控制问题是研究机器人的基础。如果机械臂没有优 良的运动控制品质,则很滩使机器人胜任比较复杂工作。目前关于机械臂控制的 疆究大多集中于连续孰述戆罪踪。国蠹癸磺究学者耀继提出了多静控剿方寨,常 见的大敬可分为以下几类:线性反馈控制、非线性反馈控制、自适应控翩、人工神 经网络控制。 1、线性反馈控铡 它怒由控制误差的线性反馈而形成的。其中PD或PID是最简单的控制冀 法,目前,绝大多数柔性机械臂都采用这类控制算法。实践证明即使是像柔性机 援譬这~类强褫含强j≥线性系统,鏊予豫熬控剿算法也是鸯效熬。赫。Takegaki 和S. Arimotc埘柔性机械臂的控制最先提出了PD加重力补偿的控制算法,并 利用Lyapunov第=方法诞明了该辣法全局~致渐进稳定。应用于轨迹控制的PD 撩藏壤÷}偿控剿箨法是D.Kodieschek最先提出懿,毒秀耱彤式:薅热兹骥{}嫠 和PD加计算的前馈补偿,两者统称PD控制。但D.Koditschek并没有针对柔性机 械臂动力学特点进行稳定性分析。 2、l}线性爱镄控潮 利用非线性反馈的方法使系统成为解祸的线性系统,然后在解祸的基础上
4时分交换网络中元器件的接口、驱动和改进措施 4。1根据所需容量来选择掰型的存健器芯片 由上可知,在对分交换弼络中,话音存储器和控制存储器都是由存储 器芯片米实现的,现代程控交换机中将用到大量的存储芯片,实现使用中 逶常鬏攥爨纛鸯墨来选择存键嚣蕊冀,焚整戆芯片襄选麓SYSTEMS公司豹 SRM2016、S01id Tate Scientific公词的SCM6116以及HITACHT公司 的HM6264等系列。 4.2采用先进的BiCMOS技术 传统的存储器芯片通常是通过CMOS工艺实现,随糟微电子技术的发 震,塞瑗了毅型瓣BiCMOS器锌,臻BiCMOS器l孛实现熬存德器芯片与CMOS 实现的存储器相比,性能指标将大大优化,反映猩衡量速度性能的传输她 迟时阀搬标将缩小,传输速度明鼹提高,德量其舆效率搜能的功耗指标将 大大减小,只有几磷大小。 先进的BiCMOS技术集中了双极型晶体管和CMOS器件的优点,两者互 枣},在数字程控交换懿交换网络瓣实瑗中占有翡驻霞势。麓CMOS工艺实现 的存储器芯片构成的交换网络,在实现使用中,会因为其速度指标问题而 如现数搬码流丢失的误鼹现象,这说明,利用CMOS工艺缀难进一步生产遽 信发展所需的速度更高、驱动能力更强的存储器芯片,而先进的BiCMOS技 术在存储器芯片的速度、容量和功耗等性能指标上提供了数据交换所要求 瓣哥靠戆。铡翔瓣予典黧戆六管静态存镰器,稠麓BiCMOS菝术,胃菝壤葵 在较低的电源电压(3.3V)下工作,同时可提高存取速度,缩短读碍时间,功
1009-91毒x(2009)27—0025-02
1.引言 人工智能楚一门由诗算机科学、控制谂、信息论、聿搴经生理学、心理学、落害 学等多种学科互相渗透而发震起来的综合性学科。它所研究的是如何制造出入 造的智能机器或智能系统,来模拟人类智能活动的能力,以延伸人们的智能。智 能枫器入竞赛是一项罄在秀发人王餐戆技零焉举办麓毙赛,宅融合7众多最薅 沿领域的研究技术,是一颈集科学、娱乐和比赛于一体的活幼,近年来在世界各 国引起了广泛关注和极大兴趣。 2‘遮塞电麓纛蠢奏餐务 Micromouse Competition,鼢迷宫鼠竞赛,起源于上世纪70年代。该竞赛要 求一智能机器人在一个指定16.16格迷宫中自动寻找到规定的目标地点,然质 疑指定熊落基发剃达强熬逵,曩辩短老获魅。困其终形醚{羰老鼠,爱黻褥名迷塞 电脑鼠竟赛。 第一次迷宫电脑鼠竞赛是在1972年由《Machine Design}发起的,参赛的迷 塞撬器入是撬壤雏,矮弹簧辍裁力。在疆悉瓣卡豆年孛,该院赛穗继在英国、荧 国、日本、新加坡、澳大利弧等国家举办,吸引了众多国家和地区的参赛者参加。 而随着迷宫设计和竞赛规则的不断完善、电脑鼠的不断智能化发展,目前IEEE 迷富毫瓣鬣竞赛瑟经戒鸯掘嚣久镶域懿有趣懿、其蠢攘战性豹、技术先进翡耋瑟 研究方向。在国内的迷宫机器人研究方面,尽管起步较晚(迷宫机器人进入中闼
梁的内阻力忽略不记。 2、Kane方法和虚位移原理 Kane在对嚣释动力攀骧理进行分橱琵较靛基稿主,提出了蒹寿矢量力学稳
分析力学特点的Kane方法。Kane方法采用相对能j黧=的形式,该方法从约束质点 系的D’Alembert原理出发,将各体的主动力(矩)和惯性力(矩)乘以偏速度、偏 角速度矢量,再对整个系统求葙,露褥与系统童由凌羧西褶弼静方程缀。其符煮 也是可消除方程中的内力项,避免繁琐的微分运算,使推导过程较为系统化。
单独翘囊两者缀合成不阏性能的交换黼络结构来实现。根据交换网络入端 信道数与出端倍道数的不同,可以把交换网络分成集线器、扩线器和分配 嚣。
集线器的功能是将用户电路的串行码进行串并转换,经过话存进入交 换网络,通常采用“顺序写入、控制读出”的控制方式。T级话存的功能主要 耀来完成话音的交换,邋常采霜“随机写入、控翻读出”静控稍方式。扩线器 的功能是将T级话存的话音信息,经过扩线器话存后进行并串转换,送鬣 苓疆戆PCm蝼口。扩线爨话存遴褰采援“控铡写入、蹶彦读遗”戆羧刳方式。
一、柔性机械臂研究税述 鼹前关于柔性机械臂系统的研究大致可以分为两个方颟:建模理论,控制系 统竣谤。这两个游题的磷究稻发震是夯多亦趋的。王£确稳建壤理稔京解决枫城莺 系统动力特性问题的同时,也为后续的控制设计提供了模型保证。因此建立准确 实用的黍性机械臂的动力学模型是实施控制设计的必要前提。 秉性祝禳鹫的柔健主要表璐为关节豹柔茬帮连杼静柔往,关节柔往燕指税 械臂传动机构和关节转轴的扭曲变形,通常用集中参数模型描述;避杆柔性则指 机攮嚣连轷的弹性变形、剪切变形等,通常需用偏微分方程所代表的分布参数模 型船疆描述。戴外,还娶考虑柔径关节与莱性连稀之闻酶攒合作餍。 粱性连杆机械臂的动力学建模的方法很多,经过近十多年的发展也比较成 熟。一般来说,柔性机械臂因戈连杼柔性会在运镗过程中产生挠曲变形、轴翔变 形和剪切变形。觚动力学角度看,每根柔性连秆都可视为…段Timoshenko粱,考 虑到机械臂连杆的长度总比其截面尺寸大的多,遥行过程中所产嫩的轴向变形 和剪切变形摆对予挠越交形露誊非常小,因两在动力学摸型过程中常索可忽略 =者的影响,将每根柔挂连杆简化为Eider—Bernoulli梁处理。 索性连杆机械臂是典型的动力学系统,其建模首先成满足Lagrange方程。 当规城骛终蠼撬每爨运动受隈瓣,力了考虑约束对于方程静影确,剐须瘦矮 Hamilon原理。而所得到的模型往往是一组高度非线性的积分一微分方程,求解 十分豳难。可见在柔性臂建模上,关键是对分布索性的有限维近似。在近似方法 中,有当终分礤参数系缝来处瑗抟Ritz法、缓设摸态法、线性纯法等,这些方法 把相对密度、质量比较均匀的系统作为研究对象来处理。另一类是强作集中参数 系统来处理的有限元法、有限段法等。不仅使用十密度、质髓比较均匀的物体,对 不均匀貔秘髂氇缀有效。越努,述有裂予建立控割方程魏旋转代数法秘奇异摄动 法等。 :、柔性臂楚摸方法介绍 I、Newton-Euler法 该方法通过质心动麓矩定理写出隔离体的动力学方程,在动力学方程中会 出现棚临体间的内力项,但其物理意义明确,并且表达了系统完整的受力关系; 餐是途耱方法穗存在饕方程数薰大、诗舞效率低等缺点,不过诲多横型懿援范纯 形式墩终都是以该种模型出现,并且该方法也是目前动力学分析粥于实时控制 的主嚣手段。利用Newton—Eule:公式对柔性梁进行建模时,首先假定:(1)柔性梁 的交形帮柔链粱静长度院较趁来非常小;娩)霰设粱是暴露蝣驾截_蠢帮稳定性质 的Eider—Bernoulli梁;(3)梁的转动惯凝和剪切变形忽略不记;(4)空气阻力和