反铲挖掘机工作装置设计
挖掘机工作装置设计
目录1绪论 (3)1.1课题背景及目地 (3)1.2国内外研究状况 (3)1.3 课题研究方法 (4)1.4 论文构成及研究内容 (4)2总体方案设计 (4)2.1 工作装置构成 (5)2.2 动臂及斗杆地结构形式 (6)2.3 动臂油缸与铲斗油缸地布置 (7)2. 4 铲斗与铲斗油缸地连接方式 (7)2.5 铲斗地结构选择 (8)2.6 原始几何参数地确定 (9)3 工作装置运动学分析 (9)3.1 动臂运动分析 (10)3.2 斗杆地运动分析 (11)3. 3 铲斗地运动分析 (12)3.4 特殊工作位置计算: (16)4基本尺寸地确定 (19)4.1 斗形参数地确定 (19)4.2 动臂机构参数地选择 (19)4.2.1 α1与A点坐标地选取 (19)4.2.2 l1与l2地选择 (20)4.2.3 l41与l42地计算 (20)4.2.4 l5地计算 (20)4.3 动臂机构基本参数地校核 (22)4.3.1 动臂机构闭锁力地校核 (22)4.3.2 满斗处于最大挖掘半径时动臂油缸提升力矩地校核 (24)4.3.3 满斗处于最大高度时,动臂提升力矩地校核 (25)4.4 斗杆机构基本参数地选择 (25)4.5 铲斗机构基本参数地选择 (27)4.5.1 转角范围 (27)4.5.2 铲斗机构其它基本参数地计算 (27)5工作装置结构设计 (29)5.1斗杆地结构设计 (29)5.1.1 斗杆地受力分析 (29)5.1.2 结构尺寸地计算 (38)5.2动臂结构设计 (40)5.2.1第一工况位置 (40)5.2.2 第二工况位置: (45)5.2.3内力图和弯矩图地求解: (48)5.3 铲斗地设计 (53)5.3.1铲斗斗形尺寸地设计 (53)5.3.2铲斗斗齿地结构计算: (54)5.3.3 铲斗地绘制: (54)6 销轴与衬套地设计 (56)6.1 销轴地设计 (56)6.2 销轴用螺栓地设计: (56)6.3 衬套地设计: (57)7 总结 (57)参考文献 (58)致谢 ............................................... 错误!未定义书签。
机械原理课程设计-反铲挖掘机工作装置设计
机械原理课程设计-反铲 挖掘机工作装置设计
本课程设计将介绍反铲挖掘机的工作原理、机构组成以及主要工作装置设计。
反铲挖掘机工作原理简介
反铲挖掘机通过液压系统和机械传动实现挖掘作业,同时具备铲平作业功能。
反铲挖掘机机构组成
主要由底盘、驾驶室、 工作装置和液压系统 等组成。
底盘负责提供稳定的 移动和支撑力。
驾驶室提供操作环境 和安全保护。
工作装置包括挖斗、 铲斗和偏航机构等。
挖掘机挖掘原理
1
工作装置下压
挖掘机通过下压工作装置使挖斗牢固地
拉杆伸展
2
插入土壤。
拉杆伸展带动挖斗前进,同时切削土壤。
3
挖斗升起
挖斗升起提起土壤,并倾倒至一侧。
挖掘机液压系统介绍
1 工作原理
液压系统通过液压油的流动实现工作装置的控制。
2 比例控制
采用比例控制技术,灵活调节工作装置的运动速度。
3 液压发动机和泵
液压发动机和泵负责提供动力和油压。
液压回路设计
单泵系统
采用简单的单泵回路,实现挖掘 机工作装置的协调运动。
液压阀
合理配置液压阀,实现工作装置 的灵活控制。
液压泵
选用高性能液压泵,确保系统的 稳定运行。
挖掘机的使用场景介绍
建筑工地
挖掘机广泛应用于建筑工地的 基础工程和土方工程。
矿山开采
挖掘机有助于矿山的矿石开采 和岩石挖掘。
道路施工
挖掘机可用于道路的开挖、平 整和修复。
反铲挖掘机的使用场景介绍
建筑工地
反铲挖掘机可用于建筑工地的地 基处理和建筑物拆除。
矿山开采
反铲挖掘机适用于矿山的土石方 开采和矿石装载。
道路施工
液压反铲装置
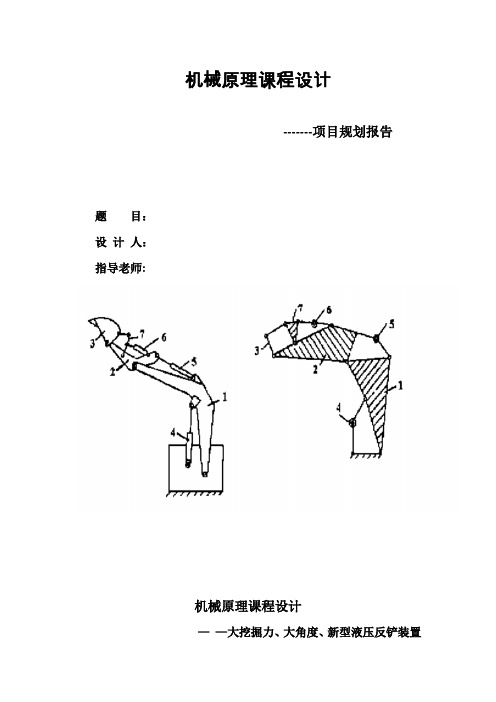
机械原理课程设计-------项目规划报告题目:设计人:指导老师:机械原理课程设计——大挖掘力、大角度、新型液压反铲装置(一)反铲装置的一般结构反铲装置是中小型液压挖掘机最主要的工作装置。
(1)结构方案(一)动臂及斗杆的结构形式动臂是工作装置中的主要构件,斗杆的结构型式往往取决于动臂的结构型式。
反铲动臂可分为整体式和组合式两类。
整体式动臂有直动臂和弯动臂两种。
直动臂构造简单、轻巧、布置紧凑,主要用于悬挂式挖掘机,如图2—1所示。
采用整体式弯动臂有利于得到较大的挖掘深度,它是专用反铲装置的常见形式(图2—2)。
整体式弯动臂在弯曲处的结构形状和强度值得注意,图2—3所示三节弯动臂有利于降低弯曲处的应力集中。
图2-3三节弯动臂近年来悬挂式挖掘机上出现了小弯臂的结构形式(图2—4),是直动臂的改良,动臂的箱形结构可以不用开口,动臂和斗杆油缸及管路的布置也比较方便。
整体式动臂结构简单、价廉,刚度相同时结构重量较组合式动臀轻。
它的缺点是替换工作装置较少,通用性较差。
为了扩大机械通用性,提高其利用率。
往往需要配备几套完全不通用的工作装置。
一般说,长期用于作业条件相似的反铲采用整体动臂结构比较合适。
组合式动臂一般都为弯臂形式。
其组合方式有两类,一类用辅助连扦(或按压缸)连接,另一类用螺栓连接。
图2—4悬挂式小弯臂连杆或液压缸铰接方案,如图2—5所示,其上、下动臂之间夹角可以借助辅助连杆或液压缸调节。
因中a为液压缸(或连杆)布置在动臂前下方的形式,b为连杆(或液压缸)布置在下动臂后上方的形式。
采用辅助液压缸来代替连杆,在作业过程中可随时进行大幅度、无级地调整上、下动锈夹角,从而提高机械的工作性能。
特别在用抓斗或反铲挖掘窄而深的基坑时,采用此方案容易得到较长距离的垂直挖掘轨迹因此可以提高挖掘质量和生产率。
由于辅助液压缸受力较大,液压缸缸径也要求较大,与其它工作液压缸缸径不易统一,在系统结构和操作上部比较复杂,实际使用中不如辅助拉杆普遍。
毕业设计说明书参考模版-挖掘机工作装置设

本科毕业论文题目:挖掘机工作装置设计学院: 机械自动化学院专业: 机械工程及自动化学号: 200603130233学生姓名: 汪乐指导教师: 侯宇日期: 2010年6月摘要液压挖掘机是一种应用广泛的多功能的建设施工机械,作为工程机械的主力机种。
出于液压挖掘机具有多品种,多功能,高质量及高效率等特点,因此受到了广大施工作业单位的青睐,其生产制造来了日益蓬勃发展。
液压挖掘机主要由发动机、工作装置、回转装置、行走装置和、电气装置和液压系统等部分组成。
本次设计主要是关于挖掘机工作装置设计,工作装置是直接完成挖掘任务的装置,进行工作装置的全面的通用性设计研究对推动国内挖掘机发展具有十分重要的意义。
本设计全面收集了国内外挖掘机工作装置设计的资料,对挖掘机的各种工况进行了分析,总结了挖掘机工作装置的设计要求。
分别对工作装置的各个组成部分进行了较为详细的设计,这其中就包括了动臂,斗杆和挖斗的选型,各种组成部分尺寸的计算及它们驱动装置的设计,驱动装置设计包括各种驱动装置的布置,行程,作用力的确定。
最后对动臂和斗杆在一些特殊工况下进行了校核。
关键字:挖掘机:工作装置:动臂:斗杆:挖斗AbstractHydraulic excavator is a kind of multifunction machine used widely in construction field.It is a primary kind of machine.Because of its multifunction,high quality and efficiency and various kinds,many company like to use it.Its manufacture is developing day by day.Hydraulic excavator consist of engine working equipment,rotator,walking equipment , electric control part and hydraulic system.One main parts—working equipment designing make up of this article.Working equipment is the first equipment to finish digging task.Using universal and professional excavator’s working Equipment’s design methods,having a study of universal design with computer is very important to the development of domestic excavator. In this article,collect most of the world excavator’s working equipment’s designing material.Analyze various kinds of excavator’s working conditions.Detailed design the various components of working device separately, including the selection and calculation of Boom, Stick and bucket and what they drive and design of their drive. The design of drive includes determine of their arrangement and travelling and force. At last checking the intensity of boom and stick in some special conditions.Keywords: excavator,working equipment,boom, stick , bucket目 录1 绪论 (1)1.1 设计选题的意义 (1)1.2 国内外液压挖掘机的发展动态和研究现状 (1)1.2.1 国外液压挖掘机的发展动态和研究现状 (1)1.2.2 国内液压挖掘机的发展动态和研究现状 (2)1.3 当前液压挖掘机存在的主要问题 (3)1.4 本设计的主要内容及目标 (4)1.4.1 设计的主要内容 (4)1.4.2 设计的关键问题 (4)1.4.3 设计过程中的已知参数 (4)2 工作装置总体方案设计 (6)2.1 机型选择及特点分析 (6)2.1.1 所用机型的适用范围 (6)2.2 工作装置构成 (6)2.3 动臂及斗杆的结构形式的初选 (7)2.3.1 动臂结构形式的初选 (7)2.3.2 斗杆结构形式的初选 (8)2.4 动臂与动臂油缸的布置 (8)2.5 铲斗与铲斗油缸的连接方式 (8)3 动臂机构参数的计算及校核 (8)3.1 动臂机构参数的确定 (8)3.1.1 α1 与A 点坐标的选取 (9)3.1.2 1l 、2l 与3l 的计算 (9)3.1.3 4142l l 与的计算 (9)3.1.4 5l 的计算 (10)3.1.5 动臂其它相关尺寸的计算 (13)3.2 动臂基本数的校核 (14)3.2.1 动臂机构闭锁力的校核 (14)3.2.2 当满斗处最大挖掘半径时,动臂油缸提升力矩校核 (17)4 斗杆机构参数的计算及校核 (18)4.1 斗杆参数的计算及选择应考虑的因素 (18)4.2 斗杆基本参数的确定 (19)4.2.1 斗杆液压缸的最大作用力臂9l 及8l 的计算 (19)4.2.2 斗杆其它相关尺的计算 (20)4.3 斗杆的结构设计和强度校核 (20)4.3.1 斗杆的受力分析 (20)4.3.2 第一工况位置的受力分析 (21)4.3.3 第二工况位置的受力分析 (28)4.3.4 斗杆内力图的绘制 (30)4.3.5 斗杆宽度、钢板厚度、许用应力的选取 (33)4.3.6 斗杆危险截面处高度h 的计算 (34)5 铲斗机构的选型及基本参数的确定 (35)5.1 铲斗的选型 (35)5.2 铲斗结构基本参数的计算 (36)5.2.1 铲斗主要参数的计算 (36)5.2.2 斗形尺寸的计算 (37)5.2.3转角范围确定 (38)5.2.4 铲斗机构其它基本参数的计算 (38)6销轴与衬套的设计 (40)6.1 销轴的设计 (40)6.2 衬套的设计 (40)7总结 (41)7.1 设计小结 (41)7.2 存在不足及改进 (41)7.3 设计展望 (41)参考文献 (42)致谢 (43)1 绪论1.1 设计选题的意义我国是一个发展中国家,在辽阔的国土上正在进行大规模的经济建设,这就需要大量的土石方施工机械为其服务,而液压挖掘机是最重要的一类土石方施工机械。
液压挖掘机反铲工作装置六连杆参数化设计

力数 值 出现 的 位 置 , 由此 判 断 铲 斗 的挖 掘 性 能和 挖 掘 轨 迹 是 否合 理 的 创 新 设 计 方 法 。 该 参 数 化 设 计 的 创 新 设 计 方 法 为 工 作 装 置优 化 设 计 提 供 了强 有 力 的 工 具 。
关键 词 : 数 化 设 计 ; 压 挖 掘 机 ; 铲 工 作 装 置 ; 大 挖 掘 力 ; 参 液 反 最 六连 杆 结 构
圈 3
Lmi- D ( n N一 1 + 3 — 9 ) 5 5。( 2— 1 )+ 3 5— 9 + 3 — 5 5
1 30。
图 2为 最 大 距 离 的 示 意 , 3为 最 小 距 离 的 示 意 。齿 轮 图 传 动 链 中 相邻 的 两 销 轴 之 间 , 们 的 距 离 是 固 定 的 , 个 值 它 这
其 可 变 距 参 数 中 L x L n的计 算 过 程 如 下 。 ma , mi D: 轮 的 分 度 圆直 径 ; 齿 N: 动齿 轮 的 个 数 ; 传 L x柔性齿轮链传 动的最长距离 ; ma :
L n 柔性齿 轮链 传动的最短距 离 ; mi:
Lma  ̄ D ( x N一 1 一 9 ( — 1 = 9 ) 5 7 ) 5。6 5 0; 7
可 变 距 的 柔 性 齿 轮 链 传 动 结 构 , 以 后 的 实 用 设 计 中 在 等 于 齿 轮 的分 度 圆 直 径 , 组 图 中 的 这 个 值 见 图 2 为 9 。 会 有 更 多 的 优 化 变 化 和 完 善 。 本 , 5 柔 性 齿 轮 链 上 不 相 邻 的 销 轴 之 间 , 着 传 动 桥 的 柔 性 , 距 5 结 束 语 因 其 离 是 可 以 随 意 灵 活 的 万 向 变 动 的 。图 2是 拉 直 的 齿 轮 传 动 机 电 工程 之 发 展 思 路 , 设 计 人 员 或 研 究 人 员 , 对 实 是 砸 组 链 。运 用 一般 的 几 何 常 识 , 容 易 计 算 出 首 尾 传 动 齿 轮 际项 目, 很 在已有基 础上 , 思维 蜂 回路 转若 干 圈后 , 幸遭 遇 有 之间的距离 , 就是 这个 柔性 齿轮 传动 链 的可 传递 最大 距 离 的一 些 活络 的 灵 动 。机 电 工 程 之 发 展 , 当 这 些 灵 动 切 实 是 L x ma 。柔 性 齿 轮 链 可 传 动 的 最 小 距 离 , 图 3 这 个 最 小 见 。 的实 觋 到具 体实 体 中 , 现 到 市 场 使 用 中 , 有 一 定 效 率 价 体 并 距 离 , 则 上 是 两 个 首 尾 传 动 齿 轮 之 间 的 最 近术 应 用 推 动 着 工 程 进 步 。 就
反铲挖掘机工作装置设计说明
机械设计说明书设计题目:反铲单斗液压挖掘机工作装置设计姓名:舒康学号:20097588指导老师:冯鉴09工程机械2班目录一.机械原理设计任务书 (4)§1.1设计题目简介 (4)§1.2设计任务 (4)二.单斗液压挖掘机结构简图 (6)三.设计中小型液压挖掘机结构参数一览表(参照下图) (8)§3.1单斗液压挖掘机结构几何参数详表 (8)§3.2斗容量为0.25 m3 的小型单斗液压挖掘机结构详细参数 (9)四.确定下列所给满足要求的结构参数 (12)§4.1确定长度与角度结构参数 (12)§4.2斗形参数的选择 (15)§4.3最大挖掘深度、停机面最大挖掘半径、最大卸载高度、最大挖掘高度的计算 (16)§4.3.1最大挖掘深度 (16)§4.3.2最大挖掘半径 (17)§4.3.3最大卸载高度 (17)五.动臂液压缸、斗杆液压缸、铲斗液压缸运动参数确定 (19)§5.1动臂液压缸 (19)§5.2斗杆液压缸 (19)§5.3铲斗液压缸 (20)六.机构自由度分析 (21)七.仿真 (22)八.机构搭建图 (23)九.参考文献: (25)十.心得和体会 (24)完成日期:年月日指导教师一.机械原理设计任务书学生姓名舒康班级09工机2班学号20097588设计题目:反铲液压挖掘机工作装置设计§1.1设计题目简介反铲式是我们见过最常见的,向后向下,强制切土。
可以用于停机作业面以下的挖掘,基本作业方式有:沟端挖掘、沟侧挖掘、直线挖掘、曲线挖掘、保持一定角度挖掘、超深沟挖掘和沟坡挖掘等。
反铲装置是液压挖掘机重要的工作装置,是一种适用于成批或中小批量生产的、可以改变动作程序的自动搬运和操作设备,它可用于操作环境恶劣,劳动强度大和操作单调频繁的生产场合。
设计数据与要求题号铲斗容量挖掘深度挖掘高度挖掘半径卸载高度铲斗挖掘力B 0.38 m3 4.1m 7.35 m 6.77 m 4.95 m 54.86KN§1.2设计任务1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各个杆件的长度;3、用软件SOLIDWORKS对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
反铲式挖掘机的设计
[键入公司名称]机械设计原理大作业反铲挖掘机工作装置设计A[键入作者姓名][选取日期]专业:城轨一班姓名:王波学号:20116531指导教师:温亚莲目录第一章:绪论 (1)1.1:设计题目及简介 (1)1.2:反铲式挖掘机简介 (2)第二章:挖掘机机械原理 (3)2.1:计算挖掘机的自由度 (3)2.2:挖掘机工作原理 (3)2.3:几个特殊位置的确定 (4)2.3.1:最大挖掘深度1H (5)2.3.2:最大挖掘高度2H (5)2.3.3:最大卸载高度3H (5)2.3.4:最大挖掘半径R (6)2.4:工作装置参数的确定 (6)2.4.1:铲斗各参数的确定 (8)2.4.2:铲斗其他参数的确定 (9)2.5:动臂机构参数的确定 (9)2.5.1:1 与A 点坐标的确定 (9)2.5.2:l 1和l 2的计算 (9)2.5.3:l 41和l 42的计算 (10)2.6:斗杆机构参数的计算 (10)2.7:铲斗机构的参数选择 (11)2.7.1:转角范围 (11)2.7.2铲斗机构其它基本参数的计算 (11)第三章 (13)3.1:心得体会 (13)第一章:绪论1.1:设计题目及简介设计题目:反铲液压挖掘机工作装置设计A反铲式是我们见过最常见的,向后向下,强制切土。
可以用于停机作业面以下的挖掘,基本作业方式有:沟端挖掘、沟侧挖掘、直线挖掘、曲线挖掘、保持一定角度挖掘、超深沟挖掘和沟坡挖掘等。
反铲装置是液压挖掘机重要的工作装置,是一种适用于成批或中小批量生产的、可以改变动作程序的自动搬运和操作设备,它可用于操作环境恶劣,劳动强度大和操作单调频繁的生产场合图1.1:挖掘机设计数据与要求设计任务1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各个杆件的长度;3、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
反铲式单斗液压挖掘机工作装置结构设计

任务书论文(设计)题目:液压挖掘机工作装置结构设计学号:姓名:专业:指导教师:系主任:一、主要内容及基本要求本设计的主要内容为:1.拟定挖掘机挖掘动作的结构方案;2. 按照方案的要求进行结构参数的计算及工艺参数的选择;3. 关键零部件的设计计算;4.根据参数查找结构设计方面的书籍,进行工作装置整体结构设计。
本设计的基本要求如下:1.掌握挖掘机动臂、斗杆、铲斗的结构参数的计算及各工艺参数的选择;2.掌握利用装配图、零件图表达设计意图。
二、重点研究的问题本设计的重点研究问题有两个:1.工作装置结构设计。
对各种实现方案进行对比,从中选择最佳结构;2.挖掘动作实现方案设计。
对挖掘机工作装置可达工作空间的分析。
三、进度安排序号各阶段完成的内容完成时间1 查阅相关资料第1周2 确定工作装置整体结构第2-3周3 零部件的强度、刚度校核第4-6周4 根据选定的一种结构设计方案,用计算机或手工绘制系统传动图、装配图、主要零件图第7-11周5 翻译相关英文资料一份3000字左右第12周6 撰写毕业论文(设计)说明书第13周78四、应收集的资料及主要参考文献【1】《液压挖掘机》:高衡张全根同编中国建筑工业出版社 1981年【2】《单斗液压挖掘机》:同济大学主编中国建筑工业出版社 1986年【3】《液压传动》:章宏甲,黄谊主编机械工业出版社2002年【4】《工程机械优化设计》;陈育仪编著中国铁道出版社1987年【5】《工程机械构造图册》;刘希平主编机械工业出版社 1990年【6】《新编机械设计手册》;蔡春源主编辽宁科学技术出版社 1993年【7】《液压元件与系统设计》;李玉琳主编北京航空航天大学出版社 1991年【8】《液压挖掘机反铲工作装置整机理论复合挖掘力的计算模型及其应用研究》;荣洪均主编重庆大学出版社 2007年【9】《液压挖掘机工作装置结构性能分析》;任友良主编 2010年【10】《工程机械结构与设计》;靳同红,王胜春主编化学工业出版社 2009年【11】《液压挖掘机构造与维修手册》;王晓伟,张青等主编化学工业出版社 2007年【12】《机械设计》(第八版);濮良贵,纪名刚主编高等教育出版社 2006年【13】《材料力学》(第4版) ;刘鸿文主编高等教育出版社 2004年【14】《理论力学》(Ⅰ);哈尔滨工业大学理论力学教研室编高等教育出版社 2009年【15】《工程机械》、《建筑机械化》等有关学术杂志在近年来发表的相关文献。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械设计说明书设计题目:反铲单斗液压挖掘机工作装置设计
*****
学号:********
指导老师:冯*
09工程机械2班
目录
一.机械原理设计任务书 (4)
§1.1设计题目简介 (4)
§1.2设计任务 (4)
二.单斗液压挖掘机结构简图 (6)
三.设计中小型液压挖掘机结构参数一览表(参照下图) (8)
§3.1单斗液压挖掘机结构几何参数详表 (8)
§3.2斗容量为0.25 m3 的小型单斗液压挖掘机结构详细参数 (9)
四.确定下列所给满足要求的结构参数 (12)
§4.1确定长度与角度结构参数 (12)
§4.2斗形参数的选择 (15)
§4.3最大挖掘深度、停机面最大挖掘半径、最大卸载高度、最大挖掘高度的计算 (16)
§4.3.1最大挖掘深度 (16)
§4.3.2最大挖掘半径 (17)
§4.3.3最大卸载高度 (17)
五.动臂液压缸、斗杆液压缸、铲斗液压缸运动参数确定 (19)
§5.1动臂液压缸 (19)
§5.2斗杆液压缸 (19)
§5.3铲斗液压缸 (20)
六.机构自由度分析 (21)
七.仿真 (22)
八.机构搭建图 (23)
九.参考文献: (25)
十.心得和体会 (24)
完成日期:年月日指导教师
一.机械原理设计任务书
学生姓名舒康班级09工机2班学号20097588
设计题目:反铲液压挖掘机工作装置设计
§1.1设计题目简介
反铲式是我们见过最常见的,向后向下,强制切土。
可以用
于停机作业面以下的挖掘,基本作业方式有:沟端挖掘、沟
侧挖掘、直线挖掘、曲线挖掘、保持一定角度挖掘、超深沟
挖掘和沟坡挖掘等。
反铲装置是液压挖掘机重要的工作装置,
是一种适用于成批或中小批量生产的、可以改变动作程序的自动搬运和操作设备,它可用于操作环境恶劣,劳动强度大和操作单调频繁的生产场合。
设计数据与要求
题号铲斗容
量挖掘深
度
挖掘高
度
挖掘半
径
卸载高度铲斗挖掘力
B 0.38 m3 4.1m 7.35 m 6.77 m 4.95 m 54.86KN
§1.2设计任务
1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;
2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各
个杆件的长度;
3、用软件SOLIDWORKS对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
4、编写设计计算说明书,其中应包括设计思路、计算及运动模型建立过程以及效果分析等。
5、在机械基础实验室应用机构综合实验装置验证设计方案的可行性。
二.单斗液压挖掘机结构简图
三.设计中小型液压挖掘机结构参数一览表(参照下图) §3.1单斗液压挖掘机结构几何参数详表
§3.2 斗容量为0.25 m 3 的小型单斗液压挖掘机结构详细参数
1.动臂液压缸mm L 1109min 1= , mm L 1774max 1=, 行程665mm
斗杆液压缸L2min = 1116.8 mm,L2max = 1787 mm,行程670mm
铲斗液压缸L3min= 850mm,L3max =1360mm,行程510mm
2.选择主参数:标准斗容量(m3)为0.25 m3,机器重量(t)为6 t。
发动机功率(kw)取为59 kw。
3.主要参数:反铲最大挖掘深度(m)5.8 m。
最大挖掘半径(m)6 m。
最大挖掘力不少于(KN)160 KN。
工作次数(s)4-7次/min。
四.确定下列所给满足要求的结构参数
§4.1确定长度与角度结构参数
整机质量计算公式:
m=2179+20147q=2179+20147*0.38=9834.86kg=9.835t
以液压挖掘机的机重为指标,用以下公式近似确定:
=k li3G,
线尺寸参:L
i
根据设计中小型液压挖掘机结构参数,利用上述公式通过matlab可解得以下结构参数:
§4.2 斗形参数的选择
斗容量q 、平均斗宽B 、转斗挖掘半径R 和转斗挖掘装满转角2ϕ(取为95°)四者之间有以下几何关系:
s K B R q )2sin 2(5.02ϕϕ-⨯=
取土壤松散系数25.1=s K ,R=0.95,得B=1.018米。
转斗挖掘时挖掘米容积的土所耗的能量称为转斗挖掘能容量,用符号E 表示。
取
07.0,5.132==K K 。
得:E=)2sin 2cos 22sin 5.11002sin 2cos sin 2(232
ϕ
ϕϕ
ϕϕϕϕϕϕϕϕ-+-+--RK K B K =1.587K
式中,K ——挖掘过程中考虑其它因素影响的系数。
§4.3 最大挖掘深度、停机面最大挖掘半径、最大卸载高度、最大挖掘高度的计算
§4.3.1 最大挖掘深度
当下置动臂油缸全缩,FQV 三点同一直线并处于垂直状态时得到最大挖掘深度,如图2-49:
最大挖掘深度:A Y l l l l H --+-++=1152min 111123max 1sin )sin(ααθα
解得:min 1θ=43°
§4.3.2 最大挖掘半径
当斗杆油缸全缩,FQV 三点同一直线,而且V Y =0时可以得到停机面最大挖掘半径,如图2-7:
302240max 0l Y l X R C V +-===6.77m
C Y = h=1.3498m ,)cos()(2)(8max 323212322140αα-⨯+⨯⨯-++==l l l l l l CV l
得到:max 32α=133.6° §4.3.3 最大卸载高度
当下置动臂油缸全伸,斗杆油缸全缩,QV 连线处于垂直状态时,可得到最大卸载高度,如图2-48:
臂铰离地高度系数k HO 范围0.6-0.7 取k HO =0.63,所以根据线尺寸参数:
L i =k li 3
G 得:
臂铰离地高度h=1.3498m ,
A Y = h-4l =1.3498-0.5456=0.8402m
最大卸载高度:
3
2118max 1max 322211max 11115max 3)180sin()sin(sin l l l l Y H A -----++--++= αααθαααθα解得:max 1θ=151.6 最大挖掘高度
)
180sin()()sin(sin 2118max 1max 3232211max 11115max ----+++--++=αααθαααθαl l l l Y H A
=6.41m
五.动臂液压缸、斗杆液压缸、铲斗液压缸运动参数确定
§5.1 动臂液压缸
计算m ax L ,min L ,摆角范围max 1ϕ
由上面公式解得:
max 1L = 2.294m ,min 1L =1.33m , max 1ϕ=108.6°
§5.2 斗杆液压缸
1.363603max 328640min 2=-----=αααααθ , 120max 2=θ 由上面公式可计算出:
min 2L = 1.374m , max 2L =2.019m ,m ax 2ϕ=83.9°
§5.3 铲斗液压缸
综合以往经验并对铲斗机构加以估算,因此给出
1353022≤≤α,
在△GMN 中,由余弦定理可计算得到:
min 3L = 1.183m , max 3L =1.844m
六.机构自由度分析
计算机构自由度:
H L P P n F --=23
活动构件数n =11,单铰数13个,复铰1个,所以,L P =15,H P =0,由上面公式可得自由度F =3×11—2×15=3
七.仿真
八.机构搭建图
九.心得和体会
一开始拿到题目后,脑袋一片空白,由于图书馆此书藏量有限,很多书已被借完,然后我在网上找到有关单斗液压挖掘机的教材和一些相关论文,然后详细研究,再加以总结,不断改进,终究在很多努力下,得以解出具体参数,接下来运用solidworks进行仿真,我在仿真上耗费了大量时间,终于能够实现其运动,但是最终遇到了一个大难题,运用solidworks中的motion插件进行运动分析时,始终出现错误,软件所列出的错误,而运动模型中根本不具有,因为模型的仿真运动并没有出现任何问题,我尝试过很多次,向很多同学请教过,但是还是没结果,因此未能画出输出机构的位移、速度、和加速度线图,请冯老师多多指教!
十.参考文献:
1.同济大学,太原重型机械学院等编著. 单斗液压挖掘机. 北京:中国建筑工业
出版社.1983:P59-111
2.唐金松主编. 简明机械设计手册. 上海:上海科学技术出版社. 2000:P41-73
3.冯鉴,何俊,雷智翔主编. 机械原理. 四川:西南交通大学出版社.
2008:P11-18
4.何挺继,朝勇主编. 现代公路施工机械. 北京:人民交通出版社. 1999:P66-74。