南航自动化学院硬件作业答案作业4
自动化导论作业
自动化导论作业自动化导论作业是一项旨在帮助学生掌握自动化技术基础知识和应用的任务。
本文将详细介绍自动化导论作业的标准格式,包括作业的标题、目的、要求、步骤和参考答案。
1. 标题:2. 目的:通过完成自动化导论作业,学生将能够:- 熟悉自动化技术的基本概念和原理;- 掌握自动化系统的组成和工作原理;- 理解自动化技术在不同领域的应用;- 培养解决问题和分析能力。
3. 要求:完成以下题目,每道题目都需要详细解答,并给出相应的理论依据和计算过程。
题目一:自动化系统的基本组成请简要说明自动化系统的基本组成,并分别介绍各个组成部分的功能和作用。
题目二:反馈控制系统请解释反馈控制系统的基本原理,并以一个实际例子说明反馈控制系统的应用。
题目三:PLC编程请编写一个简单的PLC(可编程逻辑控制器)程序,实现一个灯泡的开关控制功能。
题目四:传感器技术请选择一种传感器技术,并简要介绍其原理和应用领域。
4. 步骤:- 阅读教材和课堂笔记,熟悉自动化技术的基本概念和原理;- 独立思考和分析每个题目的要求,并查找相关资料进行学习;- 撰写作业答案,确保回答准确、详细,并附上相应的理论依据和计算过程;- 仔细检查作业,确保语法正确、无拼写错误,并保持整洁的版面。
5. 参考答案:题目一:自动化系统的基本组成自动化系统的基本组成包括传感器、执行器、控制器和人机界面。
传感器用于采集环境参数或物体状态,将其转化为电信号;执行器根据控制信号执行相应的操作;控制器接收传感器信号,经过处理和计算后产生控制信号,控制执行器的动作;人机界面用于与自动化系统进行交互,例如操作面板、显示屏等。
题目二:反馈控制系统反馈控制系统通过不断采集被控对象的输出信号,并与期望值进行比较,通过调节控制器输出信号,使被控对象的输出尽可能接近期望值。
例如,自动恒温器可以通过不断测量室内温度,并根据设定的温度值调节加热器的输出功率,以保持室内温度稳定在设定值附近。
大学自动化试题答案

大学自动化试题答案一、选择题1. 自动化控制系统的基本组成元素包括()。
A. 传感器B. 执行器C. 控制器D. 所有以上答案:D2. 在自动化控制系统中,开环控制与闭环控制的主要区别在于()。
A. 控制精度B. 系统复杂度C. 是否有反馈环节D. 响应速度答案:C3. 以下哪种控制算法是基于误差信号进行控制的?()A. 开环控制B. 闭环控制C. 串级控制D. 自适应控制答案:B4. 在自动化领域中,PID控制器的作用是()。
A. 比例-积分-微分B. 比例-积分C. 微分-积分D. 比例-微分答案:A5. 机器人自动化技术中,用于确定机器人末端执行器位置的传感器是()。
A. 位移传感器B. 力传感器C. 速度传感器D. 加速度传感器答案:A二、填空题1. 自动化控制系统的设计目标之一是达到________,即系统对于期望输出的快速且准确的响应。
答案:快速性2. 在自动化控制系统中,________是指系统对于外部干扰的抵抗能力和保持输出稳定的能力。
答案:鲁棒性3. 闭环控制系统中,反馈环节的作用是提供________信息,以便控制器进行相应的调整。
答案:误差4. 在自动化控制系统中,________是指系统输出对于输入的变化的响应程度。
答案:灵敏度5. 机器人自动化技术中,________是指机器人在执行任务时的灵活性和多样性。
答案:灵活性三、简答题1. 请简述自动化控制系统的基本工作原理。
答:自动化控制系统的基本工作原理是通过传感器收集被控制对象的状态信息,如温度、压力、速度等,这些信息被送入控制器进行处理。
控制器根据预设的控制算法和目标值计算出控制信号,再通过执行器对被控制对象进行调节,以达到期望的输出。
闭环控制系统还会将输出结果通过反馈环节返回给控制器,形成闭环,以便进行误差校正和系统优化。
2. 阐述PID控制器中比例(P)、积分(I)和微分(D)的作用。
答:比例(P)控制器的作用是根据当前误差的大小来调整控制信号,误差越大,控制作用越强。
南航柔性制造试题及答案

南航柔性制造试题及答案一、单项选择题(每题2分,共20分)1. 柔性制造系统(FMS)的核心组成部分是:A. 机器人技术B. 计算机集成制造系统(CIMS)B. 自动化仓库D. 物料搬运系统答案:B2. 在柔性制造系统中,用于实现设备和工作站之间信息交换的技术是:A. 条形码扫描B. 无线射频识别(RFID)C. 红外通信D. 蓝牙技术答案:B3. 下列哪项不是柔性制造系统设计时需要考虑的因素?A. 生产批量B. 产品多样性C. 设备利用率D. 员工数量答案:D4. 柔性制造系统能够适应市场需求变化,主要是因为它具有:A. 高度自动化B. 模块化设计C. 快速响应能力D. 成本低廉答案:C5. 在柔性制造系统中,用于减少设备故障和维护成本的技术是:A. 预防性维护B. 定期大修C. 故障后维修D. 设备过载运行答案:A6. 柔性制造系统通常不适用于以下哪种生产类型?A. 多品种小批量生产B. 单件生产C. 大批量生产D. 定制生产答案:C7. 柔性制造系统在生产过程中,对于物料的需求通常是通过以下哪种方式来实现的?A. 人工搬运B. 自动化物料搬运系统C. 客户自提D. 外部物流服务答案:B8. 在柔性制造系统中,为了提高生产效率,通常会采用哪种类型的生产计划?A. 固定生产计划B. 滚动生产计划C. 随机生产计划D. 无计划生产答案:B9. 柔性制造系统中的机器人通常需要具备哪些功能?A. 单一重复动作B. 复杂决策能力C. 多自由度运动D. 固定程序执行答案:C10. 下列哪项不是柔性制造系统的优点?A. 提高生产效率B. 降低人工成本C. 增强市场适应性D. 增加生产复杂性答案:D二、多项选择题(每题3分,共15分)11. 柔性制造系统的特点包括()。
A. 高度自动化B. 灵活性高C. 产品单一化D. 生产批量大答案:A B12. 柔性制造系统在设计时需要考虑的市场因素包括()。
A. 客户需求B. 竞争对手C. 产品价格D. 产品生命周期答案:A B D13. 柔性制造系统中的自动化仓库可以实现以下哪些功能?()A. 自动存取物料B. 物料分类C. 物料搬运D. 物料质量检测答案:A B C14. 柔性制造系统在生产过程中可以实现()。
自动化作业 答案.docx

6、图为某列管式蒸汽加热器控制流程图。
试分别说明图中PI-307、TRC-303、FRC-305所代表的意义。
PI-307表示就地安装的压力指示仪表,工段号为3,仪表序号为07;TRC-303表示集中仪表盘安装的,具有指示记录功能的温度控制仪表;工段号为3,仪表序号为03;FRC-305表示集中仪表盘安装的,具有指示记录功能的流量控制仪表;工段号为3,仪表序号为05。
11、图所示为一反应器温度控制系统示意图。
A、B两种物料进入反应器进行反应,通过改变进入夹套的冷却水流量来控制反应器内的温度不变。
试画出该温度控制系统的方块图,并指出该系统中的被控对象、被控变量、操纵变量及可能影响被控变量的干扰是什么?该温度控制系统的方块图扰动反应器温度控制系统方块图其中,被控对象:反应器;被控变量:反应器内的温度;操纵变量:冷却水流量。
可能影响被控变量的干扰因素主要有A、B两种物料的温度、进料量,冷却水的压力、温度,环境温度的高低等。
21、某化学反应器工艺规定操作温度为(900±10)°C。
考虑安全因素,控制过程中温度偏离给定值最大不得超过80°Co现设计的温度定值控制系统,在最大阶跃干扰作用下的过渡过程曲线如题1-19图所示。
试求该系统的过渡过程品质指标:最大偏差、超调量、衰减比、余差、振荡周期和过渡时间(被控温度进入新稳态值的±1 % (即900x (±1%) =±9°C)的时间),并回答该控制系统能否满足题中所给的工艺要求?题1-19图温度控制系统过渡过程曲线解最大偏差4=950-900=50 (°C);超调量3=950-908=42 (°C);由于B'=918-908=10 (°C),所以,衰减比”=3疗=42:10=4.2;余差C=908-900=8°C ;振荡周期T=45-9=36(min);过渡时间L=47min。
自动化学科概论-作业--130508
自动化学科概论作业(选修课)任课教师:刘慧贤2012—13学年一、任务与要求每位同学从以下21个思考题中选4题:●第1章:思考题2,32、简述你选择自动化专业的原因或动机。
3、如何理解“如果把整个科学技术比作茂密的树林、各个学科(专业)比作树林中的一棵棵不同种类的参天大树,则构成自动化学科的知识就是自动化参天大树上的枝和叶”?你准备如何去认识这些“枝和叶”?●第2章:思考题3,5,11,153、请以日常生活中自动化设备为例,说明其工作原理。
5、发挥你的想象,试述自动化还可能应用于什么领域。
11、自动化科学与技术的核心概念有哪些?15、试述本科自动化专业与研究生自动化学科之间的联系。
●第3章:思考题1,4,8,101、什么是自动控制系统?一个典型的自动控制系统怎样组成?4、自动控制系统有哪些基本性能要求?8、你能说出计算机控制系统的大致组成吗?10、从信息技术的角度出发,你如何理解自动控制系统及它的各个组成部分?●第4章:思考题6,96、什么是集成自动化系统?它与传统的自动化系统有什么区别?9、你了解在国民经济、社会发展的各个领域中的自动化科学和技术的应用吗?试举一些例子。
●第5章:思考题2,3,9,122、自动化学科知识体系的核心知识域是哪三个,为什么?3、用你自己的语言,试述控制知识层中各知识域间的关系。
9、用你自己的语言,试述课程与知识、课程体系与知识体系之间的关系。
12、你认为,在通识教育课、专业基础课和专业课中,各有哪几门课程最重要,你准备如何学好这些课程?●第6章:思考题2,4,6,9,112、为什么说自动化专业培养的是宽口径、多面手、综合复合型人才?4、“系统集成者”的含义是什么?6、“控制中心论”和“(计算机)软件中心论者”各自的观点是什么?为什么说这两种观点都不全面?9、当前,自动化科学技术学科面临的主要挑战是什么?如何应对?11、你认为自动化专业应该如何发展(往哪个方向发展)?要求:①选做不少于4题,但一章中最多选1题;②至少有1题需结合上网(浏览自动化相关网站)完成。
南航大线性代数作业答案2

2.证明略.
第四节 1.(1)例题.
x y z 1, (2) ax by cz a, bcx cay abz a 2 ,
a, b, c互不相同.
1
1
1
解:D a b c (b a )(c a)(c b) 0, bc ca ab 故由Cramer法则存在唯一解,则 1 D1 a a2 1 D2 a 1 D3 a 1 a (2a b c) , c a (b c)(b c 2a), x (c a )(b a ) ca ab 1 a 1 b 1 c (a c)(a 2 bc), y ab 1 a (b a)(a 2 bc), z bc a 2 , (c b)(b a) a 2 bc . (c a )(c b) 1 b
i 1 k
其中D2
x a2
1 x 2 xa1 a2 . x a1
1 x2 x x 1 x2 (6) D x
x 1 x2 x x 1 x2
Dn (1 x 2 ) Dn 1 x 2 Dn 2 , Dn Dn 1 x 2 ( Dn 1 Dn 2 ) x 2( n 3) ( D3 D2 ), 1 x2 其中D3 1 x2 x x x 1 x
解得 x3
a , x4 b , x5 c ,
x2 3 2a 2b 6c , x1 a b 5c 2 .
3. 当 0 和 1 时,无解. 当 0 或 1 时,有解. 取 x3 a , x4
b ,则 x2 b 2a , x1 4a 4b .
自动化运控习题答案汇总
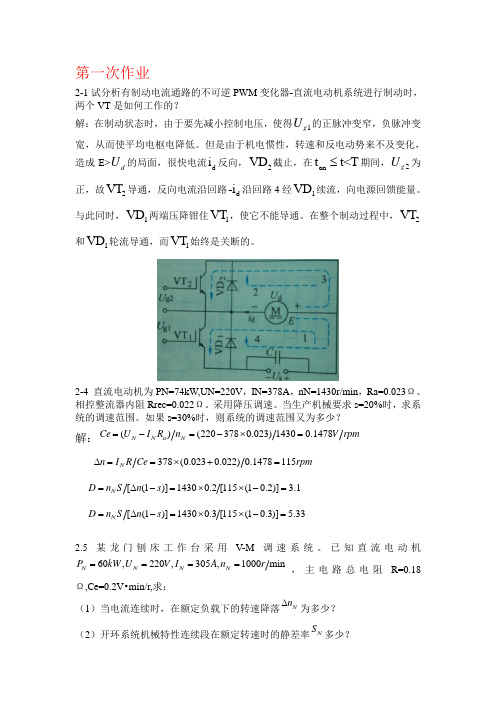
第一次作业2-1试分析有制动电流通路的不可逆PWM 变化器-直流电动机系统进行制动时,两个VT 是如何工作的?解:在制动状态时,由于要先减小控制电压,使得1g U 的正脉冲变窄,负脉冲变宽,从而使平均电枢电降低。
但是由于机电惯性,转速和反电动势来不及变化,造成E>d U 的局面,很快电流d i 反向,2VD 截止,在ont t<T ≤期间,2g U 为正,故2VT 导通,反向电流沿回路d -i 沿回路4经1VD 续流,向电源回馈能量。
与此同时,1VD 两端压降钳住1VT ,使它不能导通。
在整个制动过程中,2VT 和1VD 轮流导通,而1VT 始终是关断的。
2-4 直流电动机为PN=74kW,UN=220V ,IN=378A ,nN=1430r/min ,Ra=0.023Ω。
相控整流器内阻Rrec=0.022Ω。
采用降压调速。
当生产机械要求s=20%时,求系统的调速范围。
如果s=30%时,则系统的调速范围又为多少?解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-⨯=378(0.0230.022)0.1478115N n I R C e r p m ∆==⨯+= [(1)]14300.2[115(10.2)]3.1N D n S n s =∆-=⨯⨯-= [(1)]14300.3[115(10.3)]5.33N D n S n s =∆-=⨯⨯-=2.5 某龙门刨床工作台采用V-M 调速系统。
已知直流电动机60,220,305,1000minN N N N P kW U V I A n r ====,主电路总电阻R=0.18Ω,Ce=0.2V •min/r,求:(1)当电流连续时,在额定负载下的转速降落Nn ∆为多少?(2)开环系统机械特性连续段在额定转速时的静差率NS 多少?(3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落Nn ∆又为多少?解:(1)3050.180.2274.5/min N N n I R Ce r ∆=⨯=⨯= (2) 0274.5(1000274.5)21.5%N N S n n =∆=+=(3) [(1)]10000.05[200.95] 2.63/min N n n S D s r ∆=-=⨯⨯=第二次作业:2-9 有一V-M 调速系统:电动机参数P N =2.2kW, U N =220V , I N =12.5A, n N =1500 r/min ,电枢电阻R a =1.5Ω,电枢回路电抗器电阻RL=0.8Ω,整流装置内阻R rec =1.0Ω,触发整流环节的放大倍数K s =35。
西南大学17秋0925《《自动化制造系统》》在线作业(参考资料)

西南大学17秋0925《《自动化制造系统》》在线作业(参考资料)09251、制造规模,是指制造企业的产品品种和生产批量大小各不相同。
一般可以分为哪三种制造规模?()大批量制造超规模加工大规模制造多品种小批量制造参考答案:大批量制造;大规模制造;多品种小批量制造;2、自动化制造系统的实现原则包括下列哪三方面()产品设计工艺技术制造系统本身制造参考答案:产品设计;工艺技术;制造系统本身;3、刚性自动化设备及系统包括哪些主要内容()刚性综合自动化系统刚性自动化生产线刚性自动化单机刚性半自动化单机参考答案:刚性综合自动化系统;刚性自动化生产线;刚性自动化单机;刚性半自动化单机;4、柔性自动化设备及系统主要包括哪些内容()一般数控机床加工中心柔性制造系统计算机集成制造系统5、一个典型的自动化制造系统主要由以下哪些子系统组成?()机械加工自动化子系统储运自动化子系统质量控制系统毛坯制备自动化子系统6、在自动化制造系统中常用的搬运设备有哪些?()自动导向小车轨道导向小车传送带和悬挂式输送装置机器人或机械手自动导向小车轨道导向小车传送带和悬挂式输送装置机器人或机械手7、从人的原因考虑,管理人员或者作业者本身的失误都可能导致事故。
人为原因包括哪两方面?主观行为因素生理与心理客观因素作业环境主观行为因素生理与心理客观因素作业环境劳动强度8、可重构制造系统的主要内容有哪些?()业务处理过程的重构技术系统的重构物料处理系统的重构企业组织结构的重构业务处理过程的重构技术系统的重构物料处理系统的重构9、精益生产是贯彻以人为中心的思想,通过哪些方面()的变革,精简生产过程中一切无用、多余的东西,使生产系统能很快适应用户需求的不断变化,并能最终达到包括市场供销在内的生产的各方面最好的结果。
系统结构人员组织运行方式产品结构和市场供求10、柔性制造线由哪三部分内容组成()自动化加工设备工件输送系统控制系统工厂自动化加工设备工件输送系统控制系统工厂11、工业机器人的基本组成部分包括哪些内容?< p="">< p="">< p="">< p="">< p="">< p="">< p="">< p="">< p="">< p="">< p="">< p="">14、精益生产的主要特征是什么?()对外以用户为“上帝”对内以“人”为中心在供货方面采用“准时供货制”方式在最终目标方面为“零缺陷”15、在下列哪三个方面(),敏捷制造企业具有传统企业所不具备的特征。
设备自动化笔试题及答案
设备自动化笔试题及答案一、选择题(每题2分,共10分)1. 自动化设备中常用的传感器类型不包括以下哪一项?A. 光电传感器B. 超声波传感器C. 热敏电阻D. 电阻应变片答案:D2. 在自动化设备中,PLC代表什么?A. 可编程逻辑控制器B. 功率线通信C. 过程逻辑控制器D. 个人学习计算机答案:A3. 下列哪个不是自动化设备中常用的执行元件?A. 伺服电机B. 步进电机C. 电磁阀D. 继电器答案:D4. 在自动化设备中,以下哪个不是常用的控制方式?A. 开环控制B. 闭环控制C. 线性控制D. 非线性控制答案:C5. 自动化设备中,用于实现精确位置控制的元件是?A. 编码器B. 限位开关C. 接近开关D. 温度传感器答案:A二、填空题(每题2分,共10分)1. 自动化设备中,______(传感器)用于检测物体的存在或接近。
答案:光电传感器2. PLC的全称是______。
答案:可编程逻辑控制器3. 在自动化设备中,______(伺服电机)常用于需要精确控制速度和位置的场合。
答案:伺服电机4. 自动化设备中,______(编码器)用于提供位置反馈信号。
答案:编码器5. 自动化设备中,______(电磁阀)常用于控制流体的流动。
答案:电磁阀三、简答题(每题5分,共20分)1. 请简述自动化设备中传感器的作用。
答案:传感器在自动化设备中用于检测和测量物理量,如温度、压力、速度等,并将这些物理量转换成电信号,供控制系统进行处理和决策。
2. 描述PLC在自动化设备中的主要功能。
答案:PLC在自动化设备中主要负责接收输入信号,执行用户编写的程序,控制输出设备,实现设备的自动化控制。
3. 解释伺服电机在自动化设备中的重要性。
答案:伺服电机在自动化设备中的重要性在于其能够提供精确的速度和位置控制,确保设备运行的精确性和稳定性。
4. 阐述自动化设备中开环控制与闭环控制的区别。
答案:开环控制是指系统输出不反馈到输入端,系统无法根据输出结果调整控制策略;而闭环控制则是指系统输出会反馈到输入端,系统可以根据输出结果调整控制策略,以达到更精确的控制效果。
南航柔性制造试题及答案

南航柔性制造试题及答案一、选择题(每题2分,共20分)1. 柔性制造系统(FMS)的核心组成部分是:A. 自动化仓库B. 机器人C. 计算机控制系统D. 物料搬运系统答案:C2. 以下哪项不是柔性制造系统的特点?A. 灵活性B. 可扩展性C. 单一化D. 高度自动化答案:C3. 柔性制造系统中的物料搬运系统通常包括哪些设备?A. 输送带B. 机器人C. 起重机D. 所有选项答案:D4. 柔性制造系统的设计目标不包括以下哪项?A. 提高生产效率B. 减少生产成本C. 增加产品种类D. 减少生产人员答案:C5. 柔性制造系统在生产过程中主要解决的问题是:A. 产品标准化B. 产品多样化C. 产品单一化D. 产品批量化答案:B二、填空题(每题2分,共10分)1. 柔性制造系统能够适应______和______的变化。
答案:产品需求;生产量2. 柔性制造系统通常由______、______、______和______四个基本部分组成。
答案:加工设备;物料搬运系统;计算机控制系统;辅助系统3. 柔性制造系统可以减少______和______,提高生产效率。
答案:生产时间和生产成本4. 柔性制造系统的设计原则包括灵活性、可扩展性和______。
答案:模块化5. 柔性制造系统的物料搬运系统可以是自动化的,也可以是______的。
答案:人工三、简答题(每题10分,共30分)1. 简述柔性制造系统与传统制造系统的主要区别。
答案:柔性制造系统与传统制造系统的主要区别在于其高度的自动化和灵活性。
传统制造系统通常针对单一产品或少数几种产品进行大批量生产,而柔性制造系统能够适应产品种类的多样化和生产量的波动,实现多品种、小批量的灵活生产。
2. 描述柔性制造系统中计算机控制系统的作用。
答案:在柔性制造系统中,计算机控制系统是核心组成部分,它负责整个系统的调度、监控和管理。
计算机控制系统通过集成的软件和硬件,实现对加工设备、物料搬运系统、辅助设备等的实时控制,确保生产过程的高效和稳定。
自动化制造系统作业与思考题答案

思考题与作业题11什么是AMS?定义1:是由一定范围的被加工对象、一定的制造柔性和一定自动化水平的各种设备和高素质的人组成的一个有机整体。
定义2:在较少的人工直接或间接干预下,将原材料加工成零件或将零件组装成产品,在加工过程中实现管理过程和工艺过程自动化。
2试述AMS的意义?提高生产率、缩短生产周期、提高产品质量、提高经济效益、降低劳动强度、有利于产品更新、提高劳动者素质、劳动相关技术的发展、体现了一个国家的科技水平。
3试述AMS的功能组成和物理组成物理组成:1具有一定技术水平和决策能力的人2一定范围的被加工对象3信息流及其控制系统4能量流及其控制系统5物料流及物料处理系统功能组成:毛坯制备、热处理过程、储运过程、机械加工、装配过程、辅助过程、质量控制、系统控制。
4试述AMS中采用成组技术的作用1、利用零件之间的相似性分类归族,从而扩大了生产批量,可以以少品种、大批量生产的生产率和经济效益实现多品种、中小批量的自动化生产。
2.在产品设计领域,提高了产品的继承性和标准化、系列化、通用化成度,大大减少了不必要的多样化和重复性劳动,缩短了产品的设计研制周期。
3.在工艺准备领域,由于成组可调工艺装备的应用,大大减少了专用工艺装备的数量,相应地减少生产准备时间和费用,也减少了由于工件类型改变而引起的重新调整时间,不仅降低了生产成本,也缩短了生产周期。
5制造自动化可分为哪几个层次?1工序自动化。
2工艺过程自动化。
3制造过程的自动化思考题与作业题21试述AMS的实施流程1市场/客观需求2组建班子/队伍3需求分析4可行性论证5初步设计6详细设计7系统仿真8系统建造2试述AMS的设计特点和设计原则设计特点:定量计算与定性分析相结合、规划与仿真相结合、数学推导与专家意见相结合。
设计原则:机电互补原则、功能优化原则、自动化原则、效益最大化原则、开放性原则3试述AMS的调试类别、调试等级、调试内容、调试指标。
调试类别:系统调试调试等级:单机,主系统,系统调试内容:启动、空运段、试切屑性能调试调试指标:4AMS的评价目的是什么?全面的完整的评价一个系统。
南航微机原理及应用习题答案6

南京航空航天大学自动化学院6-4IN AL, PORT_TCMP AL, 0FEH ;k0单独被按下,即最低位为0,其余位为高JZ NEXT1CMP AL, 0FDH ;JZ NEXT2MOV AL, 00H ;其他的情况,将灯全部不点亮OUT PORT_T, ALJMP EXITNEXT1: MOV AL, 01H ;K0被按下,LED0~LED7顺次点亮,送1则对应的灯亮MOV CX, 8LOOP1: OUT PORT_T, ALCALL DELAYROL AL, 1LOOP LOOP1JMP EXITNEXT2: MOV AL, 80H ;K1被按下,LED0~LED7反序点亮,送1则对应的灯亮MOV CX, 8LOOP2: OUT PORT_T, ALCALL DELAYROR AL, 1LOOP LOOP2EXIT: ….6-5MOV BX, OFFSET STRING OUT_TEST: IN AL, STATUSTEST AL, 80HJNZ OUT_TESTMOV AL, [BX]OUT DATAS, ALINC BXCMP AL, 0DHJNZ OUT_TEST EXIT: …6-6MOV BX, OFFSET DATABUFMOV CX, 100IN_TEST: IN AL, STATUSTEST AL, 80HJZ IN_TESTIN AL, DATASMOV [BX], ALINC BXLOOP IN_TEST6-9 略6-13执行INT 8后CPU将PSW, CS, IP压入堆栈,堆栈的情况如下图:SP 00FAH00FBH00FCH00FDH00FEH00FFHSP=00FAH, SS=0300H, IP=0040H, CS=0100H因为IF,.TF进入中断后自动为零,所以PSW=0040H.6-16IRQ3申请中断, IRQ3正在被服务, 20H, 05H6-18MOV DX, 0FFDCHMOV AL, 00010011B ;ICW1OUT DX, ALMOV DX, 0FFDDHMOV AL, 90H ;ICW2OUT DX, ALMOV AL, 00000001B ;ICW4OUT DX, AL6-21RRREG DB ?SRREG DB ?IMREG DB ?…MOV AL, 00001010B ;读IRROUT 20H, ALIN AL, 20HMOV RRREG, ALMOV AL, 00001011B ;读ISR OUT 20H, ALIN AL, 20HMOV SRREG, ALIN AL, 21H ;读IMR MOV IMREG, AL。
计算机硬件基础作业--BJTU

第1章—单选题,您的得分:15.0分第1题:(单选题/1.0分) 该题得分:1.0分题干:摩尔定律的含义是()。
选项: A. 在相等面积的硅片上,晶体管数量每18个月增加一倍B. 在相等面积的硅片上,晶体管数量每18年增加一倍C. 在相等面积的硅片上,处理器制造成本每18个月增加一倍D. 在相等面积的硅片上,处理器制造成本每18年增加一倍正确答案: [A]您的答案: [A]第2题:(单选题/1.0分) 该题得分:1.0分题干:早期的计算机ENIAC所用的主要元件是()。
选项: A. 集成电路B. 晶体管C. 电子管D. 所有答案都不对正确答案: [C]您的答案: [C]第3题:(单选题/1.0分) 该题得分:1.0分题干:计算机的存储容量一般采用( )来表示。
选项: A. bitB. byteC. wordD. double word正确答案: [B]您的答案: [B]第4题:(单选题/1.0分) 该题得分:1.0分题干:目前的个人计算机(不包括手持计算机)在硬件结构上包括()。
选项: A. 台式计算机和笔记本式计算机两种B. 台式计算机和一体化桌面计算机两种C. 笔记本式计算机、平板计算机和台式计算机三种D. 笔记本式计算机、台式计算机和一体化桌面计算机三种正确答案: [D]您的答案: [D]第5题:(单选题/1.0分) 该题得分:1.0分题干:计算机主机系统中包括()。
选项: A. CPU和内部存储器B. 内部存储器和外部存储器C. CPU和外部存储器D. 内部存储器和网络适配器正确答案: [A]您的答案: [A]第6题:(单选题/1.0分) 该题得分:1.0分题干:计算机在70年代开始商业化应用,这时的计算机()。
选项: A. 已经发展为32位结构B. 已经具有标准化的计算机语言C. 核心材料是电子管D. 内部存储器是由磁性材料构成的正确答案: [B]您的答案: [B]第7题:(单选题/1.0分) 该题得分:0.0分题干:目前的手持式计算机的最主要特点包括()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.2 寻址方式可分三种:立即寻址、寄存器寻址、存储器寻址。 说明了数据存放的地方有三种可能:1.指令中 2.寄存器中 3.存储器中
3.3 存储器寻址方式可分为: 1. 直接寻址 2. 寄存器间接寻址 3. 基址寻址和变址寻址 4. 基址变址寻址 5. 基址变址相对寻址
3.4 当用BP寄存器的内容作为有效地址的一部分时,则缺省的段寄存器是SS。因为:如果用BP寻址,操作数一般放在堆栈中,用BP指针可以直接操作堆栈中的任意单元,为堆栈操作提供了方便。
3.6 (1) 立即寻址:MOV AX, 4237H 无有效地址 (2) 直接寻址:MOV AX, [4237H] EA=4237H (3) 用BX的寄存器寻址方式:MOV AX, BX 无有效地址 (4) 用BX的寄存器间址:MOV AX, [BX] EA=637DH (5) 基址寻址:MOV AX, [BX+4237H] EA= 637DH+4237H=A5B4H (6) 变址寻址:MOV AX, [SI+4237H] EA= 2A9BH+4237H=6CD2H (7) 基址加变址寻址:MOV AX, [BX+SI] EA= 637DH+2A9BH =8E18H
3.7 目的操作数 源操作数 (1) OR AX,AX 寄存器寻址 寄存器寻址 (2) MOV AH,0FFH 寄存器寻址 立即寻址 (3) ADD AX,[BX][DI] 寄存器寻址 基址变址寻址 (4) IN AL,DX 寄存器寻址 寄存器寻址 (5) JMP OPRD 直接寻址 无 (6) HLT 无 无 (7) JMP WORD PRT[BX] 寄存器间接寻址 无 (8) LDS SI,[BX] 寄存器 寄存器间接寻址 (9) MOV DI,OFFSET DATA 寄存器 立即寻址 (10) DAA 隐含 隐含 (11) OUT 7FH,AX 直接寻址 寄存器寻址 (12) CALL FAR PROC 直接寻址 无 (13) XLAT 隐含 隐含 (15) IMUL [BX+SI] 隐含 基址变址
3.8 (1) 段内直接寻址:转移地址=2BC0H+3+5119H=7CDCH (2) 使用BX寄存器和寄存器寻址方式的段内间接寻址方式: JMP BX 转移地址=1200H (3) 使用BX寄存器和基址寻址方式的段内间接寻址方式: JMP WORD PTR [BX+5119H] 转移地址=098AH 3.9 (1)MOV BX, AL 错,两个操作数位数不一致 (2)IN AL, BX 错,端口间接寻址寄存器不能用BX (3)MOV CS, [3202H] 错,目的操作数不能用CS (4)XCHG AX, 1234H 错,操作数不能用立即数 (5)MOV DS, SEG DATA 错,立即数不能直接送入段寄存器 (6)ADD AL, [BX+BP+10] 错,不能同时用两个基址寄存器寻址 (7)MOV DX, [BX] 对 (8)LEA AX, OFFSET DATA 错,OFFSET多余 (9)JMP VAR1 对 (10)JE VAR1 错,如果VAR1标号的范围超过(-128~+127)则错 (11)JMP TABLE1[SI] 对 (12)POP 2000H 错,目的操作数不能是立即数 (13)XCHG CX, DS 错,DS不做XCHG操作数 (14)JMP DWORD PTR VAR1 错,是段间直接转移,应为JMP FAR PTR VAR1
3.10(1)DX=0006H, BX= 0004H (2) SP=FFFEH, [SP]=17C6H (3) CX=0004H, [BX]=0004H (4) AX=8094H, CF=0 (5) AL=87H (6) AL=CCH, CF=0, AL=32H (7) SI=0009H (8) [DI]=94H (9) AH=84H, BL=04H (10)IP=17C6H
3.11 MOV AX,1234H AX=1234H MOV AL,98H AX=1298H MOV AH,76H AX=7698H ADD AL,81H AX=7619H SUB AL,35H AX=76E4H ADD AL,AH AX=765AH, CF=1 ADC AH,AL AX=D05AH ADD AX,0D2H AX=D12CH SUB AX,0FFH AX=D02DH ( D12DH?) 3.12 指令 CF ZF SF OF PF AF 1.AL=89H 不影响 不影响 不影响 不影响 不影响 不影响
2.AL=12H 1 0 0 1 1 1 3.AL=AFH 0 0 1 0 1 0 4.AL=AFH 1 0 1 0 1 0 5.AL=00H 0 1 0 0 1 0 6.AL=FFH 不影响 0 1 0 1 1 7.AL=00H 不影响 1 0 0 1 0 3.13 (1) AL=45H, 不影响标志位 (2) AL=05H, ZF= 0 SF= 0 PF=1 (3) AL=C7H, ZF= 0 SF=1 PF=0 (4) AL=0, ZF= 1 SF= 0 PF=1
3.14 (1) MOV AX , 0 XOR AX , AX SUB AX , AX AND AX , 0 (2) MOV AH , CL MOV AL , CL AND AL , 0FH MOV CL, 4 SHR AH,CL (3) XOR AL,0F0H (4) 乘以2:SHL AX,1 RCL DX,1 除以2:SHR DX,1 RCR AX,1
3.15 (1) 存放在DX,AX,BX中的48位数乘以2 (2)DX=2004H AX=6009H BX=000CH
3.17 (1) 转向L1 (2)转向L1 (3) 转向L2 (4) 顺序执行
3.18 (1) AX=14H, BX=0200H, CX=00H, DX=00H (2) AX=12H, BX=80H, CX=02H, DX=00H (3) AX=11H, BX=40H, CX=03H, DX=01H
3.19 (1) 将AL中的8位数据送到580H端口,[580H]=60H (2)将AX中的 16位数据送到580H端口, [580H]=80H, [581H]=60H (3) 将端口40H中的8位数据读入到AL中,AL=4FH (4) 将端口40H、41H中的16位数据读到AX中,AX=XX4FH(41H端口的内容XX) (5) 将AL中的8位数据送到端口45H,[45H]=60H (6) 将AX中的16位数据送到端口45H、46H,[45H]=60H, [46]=80H
3.20 (1) MOV AX,NUM1 ADD AX,NUM2 MOV NUM1,AX (2) MOV AL,NUM1 ADD AL,NUM1+1 ADD AL,NUM1+2 ADD AL,NUM1+3 MOV RES,AL (3) LEA SI,NUM1 MOV CX,8 MOV AX,0 AGAIN:ADD AL,[SI] ADC AH,0 INC SI LOOP AGAIN MOV RES,AX (4) MOV AX,NUM1 ADD AX,NUM2 MOV NUM2,AX MOV AX,NUM1+2 ADC AX,NUM2+2 MOV NUM2+2,AX
3.21 (1) MOV AL, NUM1 MUL NUM2 MOV RES,AL MOV RES+1,AH (2) MOV AX, NUM1 IMUL NUM2 MOV RES , AX MOV RES+2, DX (3) MOV AL,NUM1 MOV BL,46 CBW DIV BL MOV RES,AL MOV RES+1,AH (4) MOV AX,NUM1 CWD DIV NUM2 MOV RES,AX MOV RES+2,DX
3.22 +53*2: SAL AL,1 6AH=106,CF=0 -49*2: SAL AL,1 9EH=-98,CF=1 +53/2: SAR AL,1 1AH=26, CF=1 -49/2: SAR AL,1 E7H=-25,CF=1 3.23 (1) 0094H (2) 0061H (3) 8071H (4) 10F7H (5) FF1CH
3.24(1)将FIRST开始的10个字节送到SECOND开始的10个单元中 (2)将0404H开始的256个字节(128个字)单元清0
3.25 无符号数 并设AX*5/2≤FFFFH 算法1:AX*5/2=(AX*2)*2+AX再除2 MOV BX,AX SHL AX,1 ;×2 SHL AX,1 ;×4 ADD AX,BX ;×5 SHR AX,1 ;/2
算法2:AX*5/2=AX*2+AX/2 XOR BX,BX ;CF=0 MOV BX,AX SHL BX,1 ;AX*2 SHR AX,1 ;AX/2 ADD AX,BX
3.26 LEA BX,[0A80H] ;或MOV BX,0A80H MOV AL,5 XLAT
3.27 (IP)=([DI]) (CS)=([DI]+2) (SS)=1000H (SP)=2EH [SP]=09H [SP+1]=10H [SP+2]=94H [SP+3]=13H
3-28 CMP AL,01H JZ LAB1 CMP AL,02H JZ LAB2 CMP AL,04H JZ LAB3 TEST AL,07H JNZ END ...... END:HLT