RSSI信号滤波技术在机器人导航中的应用_刘贞
一种基于粒子滤波的多源融合室内定位方法
一种基于粒子滤波的多源融合室内定位方法刘嘉钰1,2,郭凤娟1,2,李江1,2(1 中国电子科技集团公司第二十研究所,西安 710068;2 陕西省组合与智能导航重点实验室,西安 710068)摘 要:室内定位技术作为社会各行业迫切需求的科技服务,尚无公认完善的解决方法。
由于单一技术的定位方法不可消除其固有缺点,多种定位技术融合提升的方法是实现高精度室内定位的重要研究方向。
本文面向日益复杂的室内环境,提出一种多源融合室内定位方法,将深度置信网络与RSSI指纹定位方法相结合实现粗略定位,同时使用行人航位测算技术完成行人航迹预测。
然后运用粒子滤波器将粗略定位结果与预测的行人航迹信息相融合,提升了传统RSSI室内指纹定位技术的精确度与实时性。
关键词:RSSI指纹定位法;多源融合定位;深度置信网络;粒子滤波中图分类号:TN92 文献标识码:A 文章编号:1674-7976-(2021)-02-098-06 Multi-Source Indoor Positioning Method Based on Particle FilterLIU Jiayu, GUO Fengjuan, LI JiangAbstract:Indoor positioning technology as the urgent demand of various industries of science and technology services, there is no recognized perfect solution. Because every positioning technology can not eliminate its inherent shortcomings, the integration of multiple positioning technologies is an important research direction to achieve high precision indoor positioning. Facing increasingly complex indoor environment, a multi-source indoor positioning method is proposed in the paper, which combines deep confidence network and RSSI fingerprint positioning method to achieve rough positioning. At the same time, pedestrian position measurement technology is used to complete pedestrian track prediction. Then, the particle filter is used to fuse the rough positioning results with the predicted pedestrian track information, which improves the accuracy and real-time performance of the traditional RSSI indoor fingerprint positioning technology.Key words: RSSI Fingerprint Positioning; Multi-Source Indoor Positioning; DBN; Particle Filter0 引言无线室内定位技术是在室内环境下使用WiFi[1-2]、蓝牙[3-4]、超宽带[5-6]、RFID[7-8]和ZigBee[9-10]等无线传输技术以及惯性导航等定位手段获取目标在室内区域中的位置信息。
RSSI滤波算法在室内定位技术上的应用

RSSI滤波算法在室内定位技术上的应用RSSI(Received Signal Strength Indicator)是无线网络中经常使用的一种信号强度指标,用于衡量接收到的无线信号的强度。
它在室内定位技术中应用广泛,主要用于测量移动设备与无线信号源之间的信号强度,以实现室内定位。
在室内定位中,RSSI滤波算法的应用主要有以下几个方面。
首先,RSSI滤波算法可以用于去除信号强度测量中的噪声。
室内环境中的多径效应、多个信号源、障碍物等因素会导致无线信号的干扰和衰减,从而影响RSSI的准确度。
为了得到更可靠的定位结果,需要对RSSI测量值进行滤波处理。
滤波算法可以通过对一段时间内的多个RSSI值进行平均或加权平均,来减小测量误差,提高定位的准确性。
其次,RSSI滤波算法可以用于快速自适应的路径损耗模型。
在室内定位中,路径损耗模型常常被用于估计信号的衰减程度,从而推断设备的位置。
然而,不同的室内环境和场景下,路径损耗模型的参数可能会有所不同。
通过使用RSSI滤波算法,可以实时地根据新的RSSI测量值更新路径损耗模型的参数,从而实现更准确的定位。
此外,RSSI滤波算法还可以用于室内定位中的信号质量评估。
除了信号强度,信号的质量和稳定性也是影响定位精度的重要因素。
通过对时序上连续的RSSI测量值进行滤波分析,可以评估无线信号的变化趋势、抖动程度等,从而提供信号质量的参考。
最后,RSSI滤波算法可以用于多传感器融合的室内定位。
除了无线信号,还可以使用其他传感器(如加速度计、陀螺仪、磁力计等)获取位置信息。
通过将RSSI测量值与其他传感器的测量值进行融合,在滤波算法的基础上,可以得到更可靠、更准确的室内定位结果。
总之,RSSI滤波算法在室内定位技术中有着广泛的应用。
通过对无线信号强度的滤波分析,可以提高定位的准确性、可靠性和稳定性。
然而,需要注意的是,不同的室内环境和应用场景下,需要选择适合的滤波算法和参数设置,以得到最佳的室内定位效果。
一种改进的基于RSSI最小二乘法和拟牛顿法的WSN节点定位算法

一种改进的基于RSSI最小二乘法和拟牛顿法的WSN节点定位算法作者:王坚程星晶刘继乾文永江来源:《电脑知识与技术》2016年第27期摘要:针对受周围环境影响的无线传感器网络定位精度等因素引起的测量误差问题,提出一种改进的基于RSSI最小二乘法和拟牛顿法的定位算法。
本文首先利用最小二乘法预估未知节点的初步位置,再将节点位置作为拟牛顿算法的初始值进行迭代计算,得到更为精确的节点位置。
仿真结果证明,该算法能有效地抑制测距传播误差,提高传感节点的定位精度。
关键词:无线传感器网络;节点定位算法;最小二乘法;拟牛顿法中图分类号:TN929 文献标识码:A 文章编号:1009-3044(2016)27-0222-04Abstract: In order to reduce the measurement error by the surrounding environment influence when the signal is transmitting to improve the positioning accuracy, this paper proposes a kind of the localization algorithm that is the least squares method combined with the quasi Newton method. First, using the least square method to estimates the unknown node, and get the initial position of the unknown node, then putting the node position as a quasi Newton algorithm of the initial value to iterative calculation, getting more exact node location. Simulation outcomes display that the algorithm can impactfully decrease the influence of the error in propagation process and improve the accuracy of the sensor node localization, and the algorithm needs no any additional hardware equipment, so it is achieved likely.Key words: wireless sensor networks; the node localization Algorithm; the least square method; quasi Newton method节点定位技术是无线传感器网络WSN(wireless sensor network)关键支撑技术,具有非常重要意义的研究价值。
RSSI定位技术在室内环境中的应用研究

RSSI定位技术在室内环境中的应用研究一、引言RSSI(Received Signal Strength Indicator)是指接收信号强度指示器,在室内环境中,通过无线信号的发射和接收,可以精确定位用户的位置,是室内定位技术中的一种主流技术。
本文将对RSSI定位技术在室内环境中的应用展开深入研究。
二、RSSI定位技术的原理RSSI定位技术的原理是基于传输信号和接收信号之间的信号强度值,通过对信号强度值进行分析和计算来确定用户的位置。
信号强度值的计算需要考虑多种因素,如信号的发射功率、接收灵敏度、无线传输的路径损耗等因素。
三、RSSI定位技术的算法1. 混合式RSSI定位算法混合式RSSI定位算法结合了多个无线室内定位技术,如指纹定位、位置排序等,通过将这些技术结合,可以提高定位准确度。
这种算法的实现需要收集大量的指纹数据,将其存储在数据库中,并使用机器学习算法进行数据挖掘,最终得到位置信息。
2. 加权平均RSSI定位算法加权平均RSSI定位算法根据多个收集的RSSI值计算权重系数,并对权重系数进行加权平均处理,从而得到用户的位置信息。
权重系数的计算需要考虑多种因素,如信号的传输距离、信号的直线距离和传输的路径损耗等因素。
四、RSSI定位技术的应用研究1. 无线室内定位系统无线室内定位系统的主要功能是实现室内定位功能,用户可以通过系统获取自己的位置信息,并进行导航、搜索、路径规划等操作。
无线室内定位系统需要收集室内的信号信息,并将其存储在数据库中,通过计算和分析这些信息,实现精确定位功能。
2. 室内导航系统室内导航系统是指在室内环境中提供导航功能的系统,用户可以通过系统获取自己的位置信息,并进行目的地导航。
使用RSSI定位技术可以实现室内导航系统的定位功能,通过计算用户的位置,系统可以提供最短路径、时间和距离等导航相关信息。
室内导航系统的应用范围广泛,可以应用于购物中心、机场、地铁等场所。
3. 室内安防系统室内安防系统是指在室内环境中提供安全保护的系统,通过使用无线传感器和摄像头等设备监测室内环境,使用RSSI定位技术可以实现位置定位,从而提供更加精准的安全保护。
RSSI信号滤波技术在机器人导航中的应用
A s a tA gop i rvdpr c l r lo tm w sd s ndt perc s teR S (e e e igl b t c: ru r mpoe at l ft grh a ei e rpoes h S I rci ds a i ei e a i g o v n
第l 2卷
第 6期
电 机 与 控 制 学 报
ELECTRI M ACHI C NES AND CONTROL
V0 . 2 No 6 11 .
NO . 2 o8 V o
20 0 8年 Biblioteka 月 1RS I 号 滤 波 技 术 在 机 器 人 导 航 中 的 应 用 S信
t e c o dn t p c h c a u n ie y u i g RS Iv u s u e o d s r et e r b t Ssae a d h o r i ae s a e w ih w sq a t d b sn S a e wa s d t e c b h o o ’ tt n z l i t r e o i o .T e n v g t n s s m o sss o o e c n n d s n a h o e i a d sr u e a g tp s in t h a ia i y t c n it fs me b a o o e ,a d e c ft m s i i td o e h tb c nr lu i T e h a i ai n c n r lc n e a h r t e c n r li f r t n f m a h b a o o e o t n t h n t e n vg t o t e t r g t e s h o t n o mai r o . o o o o o ec ecn nd s a d c c l ts t e f a u p t f rmo i o o .T e c o d n t n o e c n n d s n tn e e o k o n a u a e h n o t u s o b l r b t h o r i a i fb a o o e i o e d d t n w l i l e o b fr a iai n n l w f r d p ai n t y a c o n n wn s e a o .T e e p rme t d c t e o en vg t ,a d i a o a tt o d n mi r k o c n r s h x e o t l o a o u i i n a i iae l n t a n a c r c f . i t i a l t h sme h d h ta c u a y o 6 m s at n b e wi t i 0 a h to .
RSSI 滤波算法在室内定位技术上的应用

其中:
区间(μ − σ ≤ P(μ − σ ≤ 该区间为高概率发生区,选择高斯函数值在该区间的对应的 RSSI 值,再将这些 RSSI 值做算术平均作为滤 波优化的 RSSI 值
优点:高斯滤波解决了 RSSI 在实际中易受干扰,稳定性差的问题,以提高定位精度。 缺点:对阴影效果、能量反应等长时间干扰问题处理效果差。
检验低端异常值:
当 n=8~10 时检验高端异常值:
检验低端异常值:
检验低端ห้องสมุดไป่ตู้常值:
当 n=14~30 时检验高端异常值:
检验低端异常值:
(3)根据检出水平α,查狄克逊检验的临界值表,在狄克逊检验法的临界值表中查出 对应α,n 的临界值 D(α,n)
(4)当 (5)去除异常值后,对剩下的样本数据,重复执行步骤(1)~步骤(5),直到不再检 出异常值为止。最后剩下的数据可求其算数平均值作为最后滤波输出。优点:狄克逊检验法 能够有效地去除样本中的异常值缺点:此算法需要查表,通常与其他的滤波算法混合滤波, 复杂度较高
提高 RSSI 精度的滤波算法
均值滤波 取每个一个节点的多个 RSSI 值,求得算术平均值,作为测试结果。
优点:该方法简单,容易实现,样本容量 N 越大,精度越高。 缺点:RSSI 受干扰比较大时,其波动比较大,导致精度降低。
递推平均滤波 把连续收到的 N 个 RSSI 看成一队列,队列长度固定为 N,每收到一个新 RSSI 值后放
高斯滤波 对同一个节点接收到的多个 RSSI 值中,由于各种干扰,必然存在由误差引起的小概率
事件,通过高斯模型选取高概率发生区的 RSSI 值作为有效值,再求其几何平均值,这种方 法能够有效地减少小概率、大干扰对整体测量数据的影响,提高定位的准确性。
RSS 技术在图书馆中应用研究的文献计量分析

RSS 技术在图书馆中应用研究的文献计量分析
刘丽伟
【期刊名称】《河南图书馆学刊》
【年(卷),期】2013(000)010
【摘要】作者选择中国知识资源总库作为数据库来源,采用文献计量分析的方法,从时间分布、期刊分布、文献主题分布等方面对RSS技术在图书馆中应用的相关
论文进行统计分析,结果显示,在这一研究上,国内已有了比较多的论文著作等,为今后更深入的研究和图书馆开展RSS服务打下了坚实基础。
【总页数】3页(P88-90)
【作者】刘丽伟
【作者单位】重庆理工大学图书馆,重庆 400054
【正文语种】中文
【中图分类】G250.7
【相关文献】
1.RSS技术在图书馆新书通报系统中的应用研究——以ILASII系统为例 [J], 黄承红
2.Web 2.0技术在图书馆中的应用研究论文计量分析 [J], 路世玲
3.RSS技术在数字图书馆个性化信息服务中的应用研究 [J], 李玉芬;
4.RSS技术在数字图书馆个性化信息服务中的应用研究 [J], 李玉芬
5.区块链技术在图书馆数字化文献资源建设中的应用研究——以图书馆自馆配文献资源建设为例 [J], 于新国
因版权原因,仅展示原文概要,查看原文内容请购买。
RSSI信号的滤波分析及仿真

RSSI信号的滤波分析及仿真张静;叶小芹【摘要】In wireless sensor networks,ranging technology based on RSSI (signal strength indication) is a low cost, low complexity measurement technology, but the RSSI signal is easily affected by environmental factors, So even in the same position point of the RSSI signal strength value is also greatly different, impact on accurate determination of position.First of all, the paper analyzes the principle of RSSI distance measurement , and several common filtering methods of RSSI signal. And using MATLAB software to generate RSSI signals through the model simulation , and then using the mean filter, Gauss filter, as well as Kalman filter to process the RSSI sampling value.The simulation results show that the error of Gauss filter and Kalman filter is obviously smaller than that of the mean filter in the presence of small probability and large disturbance;Due to the impact of the number of sampling points, the stability of mean filter and Gauss filter is not as good as Kalman filter.%在无线传感网中,基于RSSI(信号强度指示)的测距技术是一项低成本的、低复杂度的测量技术,但是RSSI信号容易受环境因素的影响,所以即便在同一位置点采集到的RSSI信号强度值也大不相同,影响位置的准确判定.论文首先分析了RSSI的测距原理,以及RSSI信号几种常见的滤波方法.并用MATLAB软件通过模型仿真产生RSSI信号,然后分别采用均值滤波、高斯滤波、以及卡尔曼滤波对RSSI采样值进行处理.仿真结果表明,小概率大干扰存在情况下,高斯滤波及卡尔曼滤波的误差明显小于均值滤波;均值滤波和高斯滤波因受采样点个数的影响,故稳定性不如卡尔曼滤波好.【期刊名称】《电子设计工程》【年(卷),期】2017(025)002【总页数】4页(P45-48)【关键词】RSSI值;滤波;定位;距离误差【作者】张静;叶小芹【作者单位】河海大学文天学院,安徽马鞍山243031;河海大学文天学院,安徽马鞍山243031【正文语种】中文【中图分类】TN929.5无线传感器网络(WSN)的定位方法比较多[1-4],基于信号强度指示(RSSI)是测距的基本方法之一,因RSSI测量只需要较少的开销和较低的实现复杂度,使其成为近几年定位研究的一个热点[5-8]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
将机器人作为无线传感 器网络 W SN ( W ireless sensor netw ork) 的动态移动节点, 利用节点间接收信 号强度 RSS I 信息和网络拓扑结构可为机器人提供 便捷、 廉价的导航服务
[ 1]
。文献 [ 2] 提出一种利用
收稿日期 : 2008- 05- 05 基金项目 : 国家自然科学基金 ( 60572010) ; 黑龙江省自然科学基金 ( F2007- 08) 作者简介 : 刘 王 贞 ( 1981 - ) 男 , 博士研究生 , 主要研究方向为无线传感器网络 、 智能机器人导航 ; 祁 ( 1944 - ) , 男 , 教授 , 博士生导师 , 主要研究方向为人工智能 、 多传感器信息融合 。 丁明理 ( 1974 - ) , 男 , 副教授 , 主要研究方向为无线传感器网络 、 惯性导航 ;
[ 7]
G
G
2 问题描述
21 1 RSSI 定位的背景噪声问题 在现有 W SN 节点定位方法中, RSSI 是一种最 便利、 廉价的方式, 其 通过测量节点 的接收信号强 度 , 利用理论或经验的信道传播衰减模型将信号强 度转化为距离。由于很难建立一种自适应环境变化 的理论或经验信道传播衰减模型, 将信号强度转化 为距离时都将产生很大的模型误差。 如果利用 RSSI 信息直接表示机器人的位置, 可以 避免上述问题。在图 1中, 机器人的当前位置可表示为 A rob = (R , R
^
^
( 6)
由式 ( 3 )和 ( 6 )可知 A值可表示为 A(X k, X ) = m in 其中 ,
N- 1 ^
W c(X ) , 1 , W c(X k )
( D epartment o fA utom atic T est and Contro,l H arbin Institute o f T echno logy , H arb in 150001, China)
Abstract : A group i m proved particle filter algorithm w as designed to preprocess the RSSI( received sin ga l streng th in dicator) sig na l wh ich in cludes plenty o f background no ise. In order to avoid the m odel error , the coordinate space w hich w as quantized by using RSSI value w as used to describe the robo t. s state and target posit io n . The nav ig ation system consists of som e beacon nodes , and each of them is a distributed contro l un i. t T hen the nav ig at io n control cen ter gathers the control in for m ation from each beacon nodes and ca lculates the fin al outputs for m ob ile robo . t The coordinat io n of beacon node is no t needed to know before nav ig ation , and it a llow for adaptation to dynam ic or unknow n scenario s. T he experi m en tal indicate that an accuracy of 01 6 m is atta in able w ith this m ethod . K ey w ord s : w ireless sensor net w ork ; particle filters ; autonom ous nav iga tio n ; received singa l strength in d icat io n
k i G k i k i+ 1
。其核心思想是 每个粒
子代表一种对状态的假设, 利用一系列假设的加权 和, 表示状态的后验概率分布 , 得到状态估计值。然 而, 通常很难从后验概率分布中采样, 所以假定一种 提议概率分布函数 q (X k X k - 1, Yk ), 使其尽量接近 后验概率分布。并且假定目标的状态转移属于马尔 可夫过程 , 各状态下的测量值相对独立 , 按照序贯重 [ 8] i 要采样法 ( SISR ) , 第 i个粒子的权值 W k 为 W k = W k-1 归一化权值为 Wk = W k
第 12卷
第 6期
2008 年 11 月
电 机 与 控 制 学 报 ELE CT R IC M ACH INE S AND CONT RO L
Vo l1 12 N o1 6 Nov. 2008
RSSI信号滤波技术在机器人导航中的应用
刘
摘
贞,
丁明理,
王
祁
( 哈尔滨工业大学 自动化测试与 控制系 , 黑龙江 哈尔滨 150001)
p ( Yk X k ) p (X k X k - 1 ) , q (X k X 0: k , Yk )
( 3)
EW
j= 1Hale Waihona Puke Nj k。
i
( 4)
其中 : Yk 是 k 时刻的测量值 , 表示 X k 提议分布中得
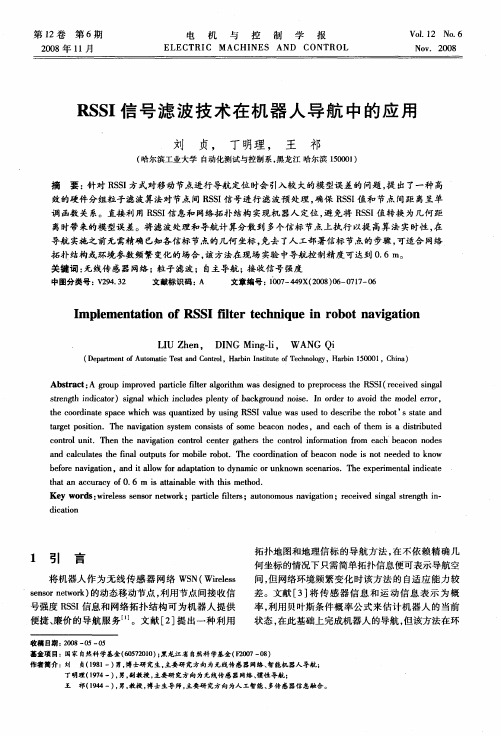
图 1 RSSI 势场量化的机器人导航空间表示 F ig. 1 Th e m ob ile robot . s state denoted by the RSSI po ten tial f ie ld
[ 5]
导航系统由多个处于机器人一跳通信范围内的 信标节点组成 , 信标节点 B i 做出的控制输出希望移 动节点沿着 H i 方向移动到目标等势线 R i ; 同理 B i + 1 和 B i + 2希望移动节点分别沿着 H i + 1和 H i + 2方向移动
G
到目标等势线 R i + 1和 R i + 2; 在理想情况下, 决策控制 中心综合各信标节点的控制输出量最终使移动节点 沿 H 方向抵达目标位置 G 点。 [ 6] 根据大尺度路径衰减模型 , 可得出接收信号 强度 R 与传输距离 d 存在对数关系, 但由于受到各 种因素的影响 , 对数模型很难 自适应环境的变 化。 在较大的背景噪声下 , 导航系统无法估计移动节点 是靠近还是远离目标等势线, 此时每个信标节点也 无法给出合理的控制输出引导移动节点到达目标位 置。必须对 RSSI信号做滤波处理 , 使其相对于信标 节点 和 移 动节 点 间距 离 的 函数 单 调。 由于 受 到 W SN 中节点存储器容量和计算能力的限制 , 选用一 种改进的高效粒子滤波算法对 RSSI 信号进行预处 理以适应分布式导航的要求。 21 2 粒子滤波 当系统可用高斯线性模型描述时 , Ka l m an 滤波 可以得到统计意义上的无偏最优估计 , 然而在基于 W SN 的移动机 器人导航 系统中 , 目标运 动模 型和 RSSI信号测量模型是非线性的, 噪声是非 高斯的, 此时 K al m an 滤波的使用受到一定限制。 粒子滤波技术通过非参数化的蒙特卡罗模拟方 法来实现递推贝叶斯滤波, 适用于任何能用状态空 间模型以及传统的卡尔曼滤波表示的非线性系统, 精度可以 逼近最优估计
要 : 针对 RSSI方式对移动节点进行导航定位时会引入较大的模型误差的问题, 提出了一种高
效的硬件分组粒子滤波算法对节点间 RSSI信号进行滤波预处理, 确保 RSSI 值和节点间距离呈单 调函数关系 。直接利用 RSSI信息和网络拓扑结构实现机器人定位 , 避免将 RSSI值转换为几何距 离时带来的模型误差 。将滤波处理和导航计算分散到多个信标节点上执行以提高算法实时性, 在 导航实施之前无需精确已知各信标节点的几何坐标 , 免去了人工部署信标节点的步骤 , 可适合网络 拓扑结构或环境参数频繁变化的场合 , 该方法在现场实验中导航控制精度可达到 01 6 m。 关键词 : 无线传感器网络; 粒子滤波 ; 自主导航 ; 接收信号强度
3 )按照均匀概率分布从区间 [ 0, 1 ] 中抽样得到 门限值 L , 即 L~ U [ 0, 1 ], 则 Xk = 其中 ,
^ p (X ) g (X k X ) , 1。 A(X k, X ) = m in ^ p (X k ) g (X Xk ) ^ ^
X , if L[ A(X k - 1, X ), X k - 1, otherw ise。
中图分类号 : V 2941 32 文献标识码 : A 文章编号 : 1007 - 449X ( 2008) 06- 0717 - 06
I m ple m entation of RSSI filter technique in robot navigation
LI U Zhen , DI NG M ing- l,i W ANG Q i
i i i i i i
, ,, R
k i+ 2
)。
( 1)
其中: R 表示 k 时刻机器人与节点 B i 间通信 RSSI 值 ; R i 表示机器人关于节点 B i 的目标 RSS I等势线 , 则机器人的目标位置为 G 可表示为 G = [R , R
G i G i+ 1
,R
G i+ 2
]。
( 2)
1 引
言
拓扑地图和地理信标的导航方法 , 在不依赖精确几 何坐标的情况下只需简单拓扑信息便可表示导航空 间, 但网络环境频繁变化时该方法的自适应能力较 差。文献 [ 3] 将传 感器信息 和运动信 息表示 为概 率, 利用贝叶斯条件概率公式来估计机器人的当前 状态 , 在此基础上完成机器人的导航, 但该方法在环