阈值分割-最大类间方差法(OTSU)
最大类间方差法

最大类间方差法是由日本学者大津于1979年提出的,是一种自适应的阈值确定的方法,又叫大津法,简称OTSU。
它是按图像的灰度特性,将图像分成背景和目标2部分。
背景和目标之间的类间方差越大,说明构成图像的2部分的差别越大,当部分目标错分为背景或部分背景错分为目标都会导致2部分差别变小。
因此,使类间方差最大的分割意味着错分概率最小.对于图像I(x,y),前景(即目标)和背景的分割阈值记作T,属于前景的像素点数占整幅图像的比例记为ω0,其平均灰度μ0;背景像素点数占整幅图像的比例为ω1,其平均灰度为μ1。
图像的总平均灰度记为μ,类间方差记为g。
假设图像的背景较暗,并且图像的大小为M×N,图像中像素的灰度值小于阈值T的像素个数记作N0,像素灰度大于阈值T的像素个数记作N1,则有:ω0=N0/ M×N (1)ω1=N1/ M×N (2)N0+N1=M×N (3)ω0+ω1=1 (4)μ=ω0*μ0+ω1*μ1 (5)g=ω0(μ0—μ)^2+ω1(μ1-μ)^2 (6)将式(5)代入式(6),得到等价公式: g=ω0ω1(μ0-μ1)^2 (7)采用遍历的方法得到使类间方差最大的阈值T,即为所求。
Otsu算法步骤如下:设图象包含L个灰度级(0,1…,L—1),灰度值为i的的象素点数为Ni ,图象总的象素点数为N=N0+N1+。
..+N(L-1).灰度值为i的点的概为:P(i) = N(i)/N.门限t将整幅图象分为暗区c1和亮区c2两类,则类间方差σ是t的函数:σ=a1*a2(u1—u2)^2 (2)式中,aj 为类cj的面积与图象总面积之比,a1 = sum(P(i))i—>t, a2 = 1—a1;uj为类cj的均值,u1 = sum(i*P(i))/a1 0->t,u2 = sum(i*P(i))/a2,t+1-〉L—1该法选择最佳门限t^ 使类间方差最大,即:令Δu=u1—u2,σb = max{a1(t)*a2(t)Δu^2} OTSU方法计算图像二值化的自适应阈值int otsu (unsigned char *image,int rows, int cols, int x0,int y0,int dx, int dy,int vvv){unsigned char *np;// 图像指针int thresholdValue=1; // 阈值int ihist[256]; // 图像直方图,256个点int i,j,k;// various countersint n,n1,n2,gmin,gmax;double m1, m2,sum, csum, fmax,sb;// 对直方图置零...memset(ihist, 0,sizeof(ihist));gmin=255; gmax=0;// 生成直方图for (i = y0 + 1;i < y0 + dy - 1; i++){np = &image[i*cols+x0+1];for (j = x0 + 1; j 〈x0 + dx - 1; j++){ihist[*np]++;if(*np > gmax)gmax=*np;if(*np < gmin)gmin=*np;np++;}}// set up everythingsum = csum = 0。
计算机科学与技术专业使用阈值技术的图像分割等毕业论文外文文献翻译及原文
毕业设计(论文)外文文献翻译文献、资料中文题目: 1.使用阈值技术的图像分割2.最大类间方差算法的图像分割综述文献、资料英文题目:文献、资料来源:文献、资料发表(出版)日期:院(部):专业:计算机科学与技术班级:姓名:学号:指导教师:翻译日期: 2017.02.14毕业设计(论文)题目基于遗传算法的自动图像分割软件开发翻译(1)题目Image Segmentation by Using ThresholdTechniques翻译(2)题目A Review on Otsu Image Segmentation Algorithm使用阈值技术的图像分割 1摘要本文试图通过5阈值法作为平均法,P-tile算法,直方图相关技术(HDT),边缘最大化技术(EMT)和可视化技术进行了分割图像技术的研究,彼此比较从而选择合的阈值分割图像的最佳技术。
这些技术适用于三个卫星图像选择作为阈值分割图像的基本猜测。
关键词:图像分割,阈值,自动阈值1 引言分割算法是基于不连续性和相似性这两个基本属性之一的强度值。
第一类是基于在强度的突然变化,如在图像的边缘进行分区的图像。
第二类是根据预定义标准基于分割的图像转换成类似的区域。
直方图阈值的方法属于这一类。
本文研究第二类(阈值技术)在这种情况下,通过这项课题可以给予这些研究简要介绍。
阈分割技术可分为三个不同的类:首先局部技术基于像素和它们临近地区的局部性质。
其次采用全局技术分割图像可以获得图像的全局信息(通过使用图像直方图,例如;全局纹理属性)。
并且拆分,合并,生长技术,为了获得良好的分割效果同时使用的同质化和几何近似的概念。
最后的图像分割,在图像分析的领域中,常用于将像素划分成区域,以确定一个图像的组成[1][2]。
他们提出了一种二维(2-D)的直方图基于多分辨率分析(MRA)的自适应阈值的方法,降低了计算的二维直方图的复杂而提高了多分辨率阈值法的搜索精度。
这样的方法源于通过灰度级和灵活性的空间相关性的多分辨率阈值分割方法中的阈值的寻找以及效率由二维直方图阈值分割方法所取得的非凡分割效果。
Otsu算法(大律法或最大类间方差法)
Otsu算法(大律法或最大类间方差法)一、Otsu最大类间方差法原理利用阈值将原图像分成前景,背景两个图象。
前景:用n1,csum,m1来表示在当前阈值下的前景的点数,质量矩,平均灰度后景:用n2, sum-csum,m2来表示在当前阈值下的背景的点数,质量矩,平均灰度当取最佳阈值时,背景应该与前景差别最大,关键在于如何选择衡量差别的标准,而在otsu算法中这个衡量差别的标准就是最大类间方差(英文简称otsu,这也就是这个算法名字的来源),在本程序中类间方差用sb表示,最大类间方差用fmax 关于最大类间方差法(otsu)的性能:类间方差法对噪音和目标大小十分敏感,它仅对类间方差为单峰的图像产生较好的分割效果。
当目标与背景的大小比例悬殊时,类间方差准则函数可能呈现双峰或多峰,此时效果不好,但是类间方差法是用时最少的。
最大类间方差法(otsu)的公式推导:记t为前景与背景的分割阈值,前景点数占图像比例为w0,平均灰度为u0;背景点数占图像比例为w1,平均灰度为u1。
则图像的总平均灰度为:u=w0*u0+w1*u1。
前景和背景图象的方差:g=w0*(u0-u)*(u0-u)+w1*(u1-u)*(u1-u)=w0*w1*(u0-u1)*(u0-u1),此公式为方差公式。
可参照概率论课本上面的g的公式也就是下面程序中的sb的表达式。
当方差g最大时,可以认为此时前景和背景差异最大,此时的灰度t是最佳阈值sb = w1*w2*(u1-u0)*(u0-u1)算法实现1:unsafe public int GetThreshValue(Bitmap image){BitmapData bd = image.LockBits(new Rectangle(0, 0, image.Width, image.Height), ImageLockMode.WriteOnly, image.PixelFormat);byte* pt = (byte*)bd.Scan0;int[] pixelNum = new int[256]; //图象直方图,共256个点byte color;byte* pline;int n, n1, n2;int total; //total为总和,累计值double m1, m2, sum, csum, fmax, sb; //sb为类间方差,fmax存储最大方差值int k, t, q;int threshValue = 1; // 阈值int step = 1;switch (image.PixelFormat){case PixelFormat.Format24bppRgb:step = 3;break;case PixelFormat.Format32bppArgb:step = 4;break;case PixelFormat.Format8bppIndexed:step = 1;break;}//生成直方图for (int i = 0; i < image.Height; i++){pline = pt + i * bd.Stride;for (int j = 0; j < image.Width; j++){color = *(pline + j * step); //返回各个点的颜色,以RGB表示pixelNum[color]++; //相应的直方图加1}}//直方图平滑化for (k = 0; k <= 255; k++){total = 0;for (t = -2; t <= 2; t++) //与附近2个灰度做平滑化,t值应取较小的值{q = k + t;if (q < 0) //越界处理q = 0;if (q > 255)q = 255;total = total + pixelNum[q]; //total为总和,累计值}//平滑化,左边2个+中间1个+右边2个灰度,共5个,所以总和除以5,后面加0.5是用修正值pixelNum[k] = (int)((float)total / 5.0 + 0.5);}//求阈值sum = csum = 0.0;n = 0;//计算总的图象的点数和质量矩,为后面的计算做准备for (k = 0; k <= 255; k++){//x*f(x)质量矩,也就是每个灰度的值乘以其点数(归一化后为概率),sum为其总和sum += (double)k * (double)pixelNum[k];n += pixelNum[k]; //n为图象总的点数,归一化后就是累积概率}fmax = -1.0; //类间方差sb不可能为负,所以fmax初始值为-1不影响计算的进行n1 = 0;for (k = 0; k < 255; k++) //对每个灰度(从0到255)计算一次分割后的类间方差sb{n1 += pixelNum[k]; //n1为在当前阈值遍前景图象的点数if (n1 == 0) { continue; } //没有分出前景后景n2 = n - n1; //n2为背景图象的点数//n2为0表示全部都是后景图象,与n1=0情况类似,之后的遍历不可能使前景点数增加,所以此时可以退出循环if (n2 == 0) { break; }csum += (double)k * pixelNum[k]; //前景的“灰度的值*其点数”的总和m1 = csum / n1; //m1为前景的平均灰度m2 = (sum - csum) / n2; //m2为背景的平均灰度sb = (double)n1 * (double)n2 * (m1 - m2) * (m1 - m2); //sb为类间方差if (sb > fmax) //如果算出的类间方差大于前一次算出的类间方差{fmax = sb; //fmax始终为最大类间方差(otsu)threshValue = k; //取最大类间方差时对应的灰度的k就是最佳阈值}}image.UnlockBits(bd);image.Dispose();return threshValue;}算法实现2:Otsu算法步骤如下:设图象包含L个灰度级(0,1…,L-1),灰度值为i的的象素点数为Ni ,图象总的象素点数为N=N0+N1+...+N(L-1)。
otsu算法的工作原理
Otsu算法是一种自适应的二值化方法,其主要思想是将图像分成背景和前景两部分,使得背景和前景之间的类间方差最大,而背景和前景内部的类内方差最小。
具体实现步骤如下:
统计图像的灰度直方图,得到每个灰度级别的像素数量。
计算每个灰度级别的归一化概率和平均灰度值。
遍历所有灰度级别,计算每个灰度级别的类内方差和类间方差。
选择使类间方差最大的灰度级别作为阈值进行二值化。
将图像中小于阈值的像素设为0,大于等于阈值的像素设为255。
通过Otsu 算法,可以得到一个自适应的二值化阈值,能够有效地将背景和前景分离,提高图像的对比度和清晰度,常用于图像分割和边缘检测等领域。
Ots算法(大律法或最大类间方差法)

Otsu算法(大律法或最大类间方差法)一、Otsu最大类间方差法原理利用阈值将原图像分成前景,背景两个图象。
前景:用n1,csum,m1来表示在当前阈值下的前景的点数,质量矩,平均灰度后景:用n2, sum-csum,m2来表示在当前阈值下的背景的点数,质量矩,平均灰度当取最佳阈值时,背景应该与前景差别最大,关键在于如何选择衡量差别的标准,而在otsu算法中这个衡量差别的标准就是最大类间方差(英文简称otsu,这也就是这个算法名字的来源),在本程序中类间方差用sb表示,最大类间方差用fmax 关于最大类间方差法(otsu)的性能:类间方差法对噪音和目标大小十分敏感,它仅对类间方差为单峰的图像产生较好的分割效果。
当目标与背景的大小比例悬殊时,类间方差准则函数可能呈现双峰或多峰,此时效果不好,但是类间方差法是用时最少的。
最大类间方差法(otsu)的公式推导:记t为前景与背景的分割阈值,前景点数占图像比例为w0,平均灰度为u0;背景点数占图像比例为w1,平均灰度为u1。
则图像的总平均灰度为:u=w0*u0+w1*u1。
前景和背景图象的方差:g=w0*(u0-u)*(u0-u)+w1*(u1-u)*(u1-u)=w0*w1*(u0-u1)*(u0-u1),此公式为方差公式。
可参照概率论课本上面的g的公式也就是下面程序中的sb的表达式。
当方差g最大时,可以认为此时前景和背景差异最大,此时的灰度t是最佳阈值sb = w1*w2*(u1-u0)*(u0-u1)算法实现1:unsafe public int GetThreshValue(Bitmap image){BitmapData bd = image.LockBits(new Rectangle(0, 0, image.Width, image.Height), ImageLockMode.WriteOnly, image.PixelFormat);byte* pt = (byte*)bd.Scan0;int[] pixelNum = new int[256]; //图象直方图,共256个点byte color;byte* pline;int n, n1, n2;int total; //total为总和,累计值double m1, m2, sum, csum, fmax, sb; //sb为类间方差,fmax存储最大方差值int k, t, q;int threshValue = 1; // 阈值int step = 1;switch (image.PixelFormat){case PixelFormat.Format24bppRgb:step = 3;break;case PixelFormat.Format32bppArgb:step = 4;break;case PixelFormat.Format8bppIndexed:step = 1;break;}//生成直方图for (int i = 0; i < image.Height; i++){pline = pt + i * bd.Stride;for (int j = 0; j < image.Width; j++){color = *(pline + j * step); //返回各个点的颜色,以RGB表示pixelNum[color]++; //相应的直方图加1}}//直方图平滑化for (k = 0; k <= 255; k++){total = 0;for (t = -2; t <= 2; t++) //与附近2个灰度做平滑化,t值应取较小的值{q = k + t;if (q < 0) //越界处理q = 0;if (q > 255)q = 255;total = total + pixelNum[q]; //total为总和,累计值}//平滑化,左边2个+中间1个+右边2个灰度,共5个,所以总和除以5,后面加0.5是用修正值pixelNum[k] = (int)((float)total / 5.0 + 0.5);}//求阈值sum = csum = 0.0;n = 0;//计算总的图象的点数和质量矩,为后面的计算做准备for (k = 0; k <= 255; k++){//x*f(x)质量矩,也就是每个灰度的值乘以其点数(归一化后为概率),sum为其总和sum += (double)k * (double)pixelNum[k];n += pixelNum[k]; //n为图象总的点数,归一化后就是累积概率}fmax = -1.0; //类间方差sb不可能为负,所以fmax初始值为-1不影响计算的进行n1 = 0;for (k = 0; k < 255; k++) //对每个灰度(从0到255)计算一次分割后的类间方差sb{n1 += pixelNum[k]; //n1为在当前阈值遍前景图象的点数if (n1 == 0) { continue; } //没有分出前景后景n2 = n - n1; //n2为背景图象的点数//n2为0表示全部都是后景图象,与n1=0情况类似,之后的遍历不可能使前景点数增加,所以此时可以退出循环if (n2 == 0) { break; }csum += (double)k * pixelNum[k]; //前景的“灰度的值*其点数”的总和m1 = csum / n1; //m1为前景的平均灰度m2 = (sum - csum) / n2; //m2为背景的平均灰度sb = (double)n1 * (double)n2 * (m1 - m2) * (m1 - m2); //sb为类间方差if (sb > fmax) //如果算出的类间方差大于前一次算出的类间方差{fmax = sb; //fmax始终为最大类间方差(otsu)threshValue = k; //取最大类间方差时对应的灰度的k就是最佳阈值}}image.UnlockBits(bd);image.Dispose();return threshValue;}算法实现2:Otsu算法步骤如下:设图象包含L个灰度级(0,1…,L-1),灰度值为i的的象素点数为Ni ,图象总的象素点数为N=N0+N1+...+N(L-1)。
otsu阈值最大类间方差法

Otsu阈值最大类间方差法是一种确定阈值的算法,通过将图像分成前景和背景两部分,以最大化这两部分之间的方差。
这种方法是在判决分析最小二乘法原理的基础上推导得出的。
具体来说,Otsu算法首先基于直方图得到每个分割特性值的发生概率,并以阈值变量将分割特征值分为两类。
然后,算法计算出每一类的类内方差及类间方差,选取使类间方差最大或类内方差最小的阈值T作为最佳阈值。
当目标与背景的大小比例悬殊时,类间方差准则函数可能呈现双峰或多峰,此时效果不好。
但总体来说,Otsu阈值最大类间方差法在图像分割、二值化等方面具有高效性,且该算法的稳定性能够得到保证。
阈值分割技术

摘要图像分割是一种重要的图像技术,在理论研究和实际应用中都得到了人们的广泛重视。
图像分割是把图像中有意义的特征区域或者把需要的应用的特征区域提取出来。
阈值分割是一种简单有效的图像分割方法。
它对物体与背景又较强对比的图像分割特别有效,所有灰度值大于或等于阈值的像素被判决属于物体。
为常见的阈值分割方法有全局阈值、自适应阈值。
最佳阈值的选择有直方图技术、最大类间方差法(OTSU)、迭代法。
关键词:图像分割,阈值分割,灰度值,最佳阈值1 MATLAB简介及其应用MATLAB 是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。
MATLAB是矩阵实验室(Matrix Laboratory)的简称,和Mathematica、Maple并称为三大数学软件。
它在数学类科技应用软件中在数值计算方面首屈一指。
MATLAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
MATLAB 产品族可以用来进行以下各种工作:1. 数值分析2. 数值和符号计算3. 工程与科学绘图4. 控制系统的设计与仿真5. 数字图像处理技术6. 数字信号处理技术7. 通讯系统设计与仿真8. 财务与金融工程MATLAB 的应用范围非常广,包括信号和图像处理、通讯、控制系统设计、测试和测量、财务建模和分析以及计算生物学等众多应用领域。
附加的工具箱(单独提供的专用MATLAB 函数集)扩展了MATLAB 环境,以解决这些应用领域内特定类型的问题。
Matlab的特点如下:1.此高级语言可用于技术计算2.此开发环境可对代码、文件和数据进行管理3.交互式工具可以按迭代的方式探查、设计及求解问题4.数学函数可用于线性代数、统计、傅立叶分析、筛选、优化以及数值积分等5.二维和三维图形函数可用于可视化数据6.各种工具可用于构建自定义的图形用户界面7.各种函数可将基于MATLAB的算法与外部应用程序和语言(如C、C++、Fortran、Java、COM 以及Microsoft Excel)集成8.不支持大写输入,内核仅仅支持小写MATLAB 有出色的图形处理功能:向量和矩阵用图形表现出来,并且可以对图形进行标注和打印。
阈值分割技术
摘要图像分割是一种重要的图像技术,在理论研究和实际应用中都得到了人们的广泛重视。
图像分割是把图像中有意义的特征区域或者把需要的应用的特征区域提取出来。
阈值分割是一种简单有效的图像分割方法。
它对物体与背景又较强对比的图像分割特别有效,所有灰度值大于或等于阈值的像素被判决属于物体。
为常见的阈值分割方法有全局阈值、自适应阈值。
最佳阈值的选择有直方图技术、最大类间方差法(OTSU)、迭代法。
关键词:图像分割,阈值分割,灰度值,最佳阈值1 MATLAB简介及其应用MATLAB 是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。
MATLAB是矩阵实验室(Matrix Laboratory)的简称,和Mathematica、Maple并称为三大数学软件。
它在数学类科技应用软件中在数值计算方面首屈一指。
MATLAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
MATLAB 产品族可以用来进行以下各种工作:1. 数值分析2. 数值和符号计算3. 工程与科学绘图4. 控制系统的设计与仿真5. 数字图像处理技术6. 数字信号处理技术7. 通讯系统设计与仿真8. 财务与金融工程MATLAB 的应用范围非常广,包括信号和图像处理、通讯、控制系统设计、测试和测量、财务建模和分析以及计算生物学等众多应用领域。
附加的工具箱(单独提供的专用MATLAB 函数集)扩展了MATLAB 环境,以解决这些应用领域内特定类型的问题。
Matlab的特点如下:1.此高级语言可用于技术计算2.此开发环境可对代码、文件和数据进行管理3.交互式工具可以按迭代的方式探查、设计及求解问题4.数学函数可用于线性代数、统计、傅立叶分析、筛选、优化以及数值积分等5.二维和三维图形函数可用于可视化数据6.各种工具可用于构建自定义的图形用户界面7.各种函数可将基于MATLAB的算法与外部应用程序和语言(如C、C++、Fortran、Java、COM 以及Microsoft Excel)集成8.不支持大写输入,内核仅仅支持小写MATLAB 有出色的图形处理功能:向量和矩阵用图形表现出来,并且可以对图形进行标注和打印。
阈值分割公式

阈值分割公式阈值分割公式阈值分割是一种常用的图像处理技术,它可以将图像根据给定的阈值进行二值化处理,使得图像中的目标物体与背景色彩有所区分,便于后续的处理。
随着图像处理技术的不断发展,阈值分割也不断完善,其中最常用的就是基于阈值的分割公式。
一、常见阈值分割算法1. Otsu阈值法Otsu是一种基于直方图的阈值分割方法,它的基本思想是寻找一个最佳阈值,使得图像中目标物体与背景的差异最大化。
这种方法适用于灰度图像,具有较好的分割效果。
Otsu算法的计算公式如下:$$\sigma^2(w_0,w_1) =w_0(t)\sigma^2_0(t)+w_1(t)\sigma^2_1(t)$$2. 最大熵阈值法最大熵阈值法是一种基于信息熵的阈值分割方法,它通过最大化图像的熵值,来确定最佳阈值。
这种方法适用于处理具有复杂背景的图像,它的计算公式如下:$$\max H(T)= - \sum_{i=1}^{k}p_i\log_2(p_i)$$3. 基于聚类的阈值分割法基于聚类的阈值分割法是一种就是把原始图像分成若干个子集,使得每个子集都包含一部分图像的像素值,从而将图像进行分割。
它计算每个子集的灰度均值和方差来确定分割阈值,公式如下:$$\max \varepsilon(i)=\frac{(T*\mu_i-\mu)^2}{T*\sigma_i^2+(1-T)*\sigma_{i+1}^2}$$二、阈值分割的应用阈值分割在实际应用中广泛,例如人脸识别、车牌号识别等。
通过对图像二值化处理可以提高算法的精度,使得对目标物体的检测更加准确。
例如,在车牌号识别中,阈值分割可以先进行图像二值化处理,再进行腐蚀、膨胀等操作,从而将车牌号与背景进行分离,然后再进行字符识别等操作,提高了算法的效率和准确性。
三、总结阈值分割是图像处理中最为常见和实用的方法之一,其应用范围广泛,通过选择不同的阈值分割算法和参数,可以实现不同的图像处理任务。
【转】七种常见阈值分割代码(Otsu、最大熵、迭代法、自适应阀值、手动、迭代法、基本全局阈值法)

【转】七种常见阈值分割代码(Otsu、最⼤熵、迭代法、⾃适应阀值、⼿动、迭代法、基本全局阈值法)⼀、⼯具:VC+OpenCV⼆、语⾔:C++三、原理otsu法(最⼤类间⽅差法,有时也称之为⼤津算法)使⽤的是聚类的思想,把图像的灰度数按灰度级分成2个部分,使得两个部分之间的灰度值差异最⼤,每个部分之间的灰度差异最⼩,通过⽅差的计算来寻找⼀个合适的灰度级别来划分。
所以可以在⼆值化的时候采⽤otsu 算法来⾃动选取阈值进⾏⼆值化。
otsu算法被认为是图像分割中阈值选取的最佳算法,计算简单,不受图像亮度和对⽐度的影响。
因此,使类间⽅差最⼤的分割意味着错分概率最⼩。
设t为设定的阈值。
wo:分开后前景像素点数占图像的⽐例uo:分开后前景像素点的平均灰度w1:分开后被景像素点数占图像的⽐例u1:分开后被景像素点的平均灰度u=w0*u0 + w1*u1 :图像总平均灰度从L个灰度级遍历t,使得t为某个值的时候,前景和背景的⽅差最⼤,则这个 t 值便是我们要求得的阈值。
其中,⽅差的计算公式如下:g=wo * (uo - u) * (uo - u) + w1 * (u1 - u) * (u1 - u)[ 此公式计算量较⼤,可以采⽤: g = wo * w1 * (uo - u1) * (uo - u1) ]由于otsu算法是对图像的灰度级进⾏聚类,so 在执⾏otsu算法之前,需要计算该图像的灰度直⽅图。
迭代法原理:迭代选择法是⾸先猜测⼀个初始阈值,然后再通过对图像的多趟计算对阈值进⾏改进的过程。
重复地对图像进⾏阈值操作,将图像分割为对象类和背景类,然后来利⽤每⼀个类中的灰阶级别对阈值进⾏改进。
图像阈值分割---迭代算法1 .处理流程:1.为全局阈值选择⼀个初始估计值T(图像的平均灰度)。
2.⽤T分割图像。
产⽣两组像素:G1有灰度值⼤于T的像素组成,G2有⼩于等于T像素组成。
3.计算G1和G2像素的平均灰度值m1和m2;4.计算⼀个新的阈值:T = (m1 + m2) / 2;5.重复步骤2和4,直到连续迭代中的T值间的差⼩于⼀个预定义参数为⽌。
OTSU阈值分割的实现要点

目录摘要1原理与实现 (1)1.1图像分割 (1)1.2阈值分割 (1)1.3 OTSU算法 (2)2 设计实现程序 (4)3 程序运行结果与分析 (7)3.1程序运行结果 (7)3.2 结果分析 (9)4 心得体会 (11)参考文献 (12)摘要图像分割是图像识别和图像理解的基本前提步骤。
图像分割算法一般是基于灰度的两个性质之一:不连续性和相似性。
图像的阈值分割是基于图像的相似性根据事先制定的准则将图像分割为相似的区域。
图像分割的作用是把反映物体真实情况的、占据不同区域的、具有不同特性的目标区分开来,以便计算各个目标的数字特征。
图像分割质量的好坏直接影响后续图像处理的效果,甚至决定其成败,因此,图像分割的作用至关重要。
本设计主要是使用阈值分割法中的最大类间方差法(OTSU)的原理来将图像进行不使用库函数和使用库函数的阈值分割,并将两种方法的阈值显示出来进行比较,同时显示不同阈值情况下的图像结果。
关键词:图像分割阈值分割最大类间方差法1原理与实现1.1图像分割数字图像处理的目的之一是图像识别, 而图像分割是图像识别工作的基础。
图像分割是将一幅图像分解成若干互不交叠的、有意义的、具有相同性质的区域。
这些区域互不交叠, 每一个区域内部的某种特性或特征相同或接近, 而不同区域间的图像特征则有明显差别, 即同一区域内部特性变化平缓, 相对一致, 而区域边界处则特性变化比较剧烈。
区域内是一个所有像素都有相邻或相接触像素的集合, 是像素的连通集。
在一个连通集中任意两个像素之间, 都存在一条完全由这个集合的元素构成的连通路径。
图像分割的基础是像素间的相似性和不连续性。
所谓“相似性”是指在某个区域内像素具有某种相似的特性, 如灰度一样, 纹理相同;所谓“不连续性”是指特性不连续, 如灰度值突变等。
图像分割的方法有多种, 依据工作对象来分, 可分为点相关分割和区域相关分割; 按算法分类, 可分为阈值法、界限检测法、匹配法、跟踪法等。
otsu 双阈值算法

otsu 双阈值算法Otsu双阈值算法是一种基于图像灰度直方图的自适应阈值分割方法。
它由日本学者大津展之于1979年提出,被广泛应用于图像处理领域。
该算法通过计算图像的类间方差最大值,确定最佳的阈值,实现图像的二值化处理。
Otsu双阈值算法的核心思想是将图像分为背景和前景两部分,使得背景和前景之间的类间方差最大化。
类间方差是指图像的不同部分之间的差异程度,方差越大表示两个部分之间的差异越大。
因此,通过最大化类间方差,可以得到最佳的阈值,将图像分割为背景和前景两部分。
具体实现Otsu算法的步骤如下:1. 首先,计算图像的灰度直方图,即统计图像中每个灰度级别的像素个数。
2. 然后,计算图像的总像素数,用来归一化灰度直方图。
3. 接下来,初始化类间方差的最大值为0,以及最佳阈值为0。
4. 对于每个可能的阈值T,计算两个部分的像素个数和像素值的总和。
5. 根据公式计算类间方差,并更新最大值和最佳阈值。
6. 最后,根据最佳阈值对图像进行二值化处理,将灰度值大于阈值的像素设置为前景,灰度值小于等于阈值的像素设置为背景。
Otsu双阈值算法的优点是自适应性强,能够根据图像的特点自动选择最佳的阈值,适用于各种类型的图像。
它不依赖于先验知识,可以有效地处理光照不均匀、噪声干扰等问题,得到较好的分割结果。
然而,Otsu算法也存在一些限制。
首先,它假设图像的背景和前景之间的灰度级别具有双峰分布,这在某些图像中可能不成立,导致分割效果不佳。
其次,算法对噪声敏感,噪声干扰会影响到灰度直方图的计算结果,进而影响阈值的选择。
此外,Otsu算法只能得到两个阈值,对于复杂的图像分割任务可能不够灵活。
为了克服这些限制,研究者们提出了许多改进的Otsu算法。
例如,基于最大熵的Otsu算法可以处理灰度级别不均匀的图像,基于模糊聚类的Otsu算法可以处理具有模糊边界的图像。
这些改进算法在特定的应用场景下具有更好的效果。
Otsu双阈值算法是一种简单而有效的图像分割方法,通过最大化类间方差来确定最佳阈值,实现图像的二值化处理。
otsu阈值分割
otsu阈值分割阈值分割是一种基于灰度模型的图像分割方法,它可以将图像分割为两个部分,一般情况下,背景被认为是一个灰度值低的区域,而目标则是一个灰度值高的区域。
此外,阈值分割也可以用于有多个对象的图像,这时,我们可以对每个对象定义一个灰度值的阈值,以根据灰度值将图像分割为不同的区域,而Otsu阈值分割则是一种比较经典的阈值分割方法,它有以下几个特点:(1)Otsu的阈值分割是自适应的。
它可以自动根据图像的直方图进行阈值分割,无需手动设置阈值;(2)Otsu的阈值分割是最优的。
它可以使图像分割出的二值图有最小的类间方差,这是一个很好的度量指标;(3)Otsu的阈值分割是实时可用的,可以非常快速地将图像分割为二值图;(4)Otsu的阈值分割方法简单易行,经过简单的统计分析,就可以找到最佳的阈值。
2、Otsu阈值分割Otsu阈值分割旨在自动检测最佳二值化阈值,其基本思想是:用信息变差法寻找最佳阈值,将灰度值划分为两类,使类间方差的和最大。
类间方差的和即类间变差熵,用下式表示其中,P(ω)表示灰度级ω的像素的概率,μ0和μ1表示分别在灰度级ω0和ω1后的类均值,而μ表示整幅图像的均值。
由于我们的目标是找到最大信息熵,那么我们只需要将阈值等于使类间变差熵最大的灰度级ω即可,可以将灰度级ω0~ω1这个范围划分为N个灰度级,然后计算每一个灰度级的类间变差熵,并找到使类间变差熵最大的灰度级,就是最佳阈值。
3、实验结果实验采用MATLAB来实现,实验的图像来自于标准的Lena 图像(512*512),使用Otsu阈值分割方法将其分割为黑白两部分,实验结果如下图所示:实验结果:经过Otsu阈值分割,我们得出的最佳阈值为114,可以将图像分割为黑白两部分,分割效果良好。
总结Otsu阈值分割是一种比较经典的阈值分割方法,有很多优秀的特点,在实际应用中有着非常重要的地位,它可以自动找到最佳的阈值,将图像分割为黑白两部分,有效提取图像中的信息。
otsu阈值处理 确定阈值的算法

otsu阈值处理确定阈值的算法
otsu阈值处理是一种自适应的二值化图像处理方法,它通过计算像素灰度值的方差来确定最佳的二值化阈值。
这种方法适用于背景和前景之间的灰度差异较大的图像。
otsu阈值处理的具体算法如下:
1. 统计图像灰度级的直方图,计算每个灰度级出现的频率。
2. 初始化类间方差为0,然后逐个尝试每个灰度级作为阈值,并将图像分为两个部分,每个部分的像素分别计算其均值和方差。
3. 根据分割后两部分的像素数量比例,分别计算出两个部分的加权均值。
然后根据这两个加权均值和分割后两部分的像素数量比例计算出类间方差。
4. 如果计算出的类间方差大于当前最大类间方差,则将当前灰度级作为最佳阈值,并将当前类间方差作为最大类间方差。
5. 重复步骤2至4,直到尝试完所有灰度级为止。
6. 返回最佳阈值。
otsu阈值处理的优点是可以自动确定最佳阈值,不需要人工干预,具
有更好的适应性。
在图像的二值化处理中,otsu阈值处理也被广泛应用。
在实际应用中,otsu阈值处理算法还需要注意一些问题。
首先是需要
对图像进行预处理,包括去噪和灰度级缩放等。
其次是需要根据具体
情况选择合适的处理方法。
例如,对于漏斗状的图像,可以使用形态
学操作进行处理,以提高分割效果。
综上所述,otsu阈值处理是一种基于类间方差的自适应二值化方法,
其算法简单、运算速度快、效果好。
在图像处理领域得到了广泛应用,并且是一种十分经典和有效的算法。
阈值分割

在图像处理领域,二值图像运算量小,并且能够体现图像的关键特征,因此被广泛使用。
将灰度图像变为二值图像的常用方法是选定阈值,然后将待处理图像的每个像素点进行单点处理,即将其灰度值与所设置的门限进行比对,从而得到二值化的黑白图。
这样一种方式因为其直观性以及易于实现,已经在图像分割领域处于中心地位。
本文主要对最近一段时间作者所学习的阈值化图像分割算法进行总结,全文描述了作者对每种算法的理解,并基于OpenCV和VC6.0对这些算法进行了实现。
最终将源代码公开,希望大家一起进步。
(本文的代码暂时没有考虑执行效率问题)首先给出待分割的图像如下:1、Otsu法(最大类间方差法)该算法是日本人Otsu提出的一种动态阈值分割算法。
它的主要思想是按照灰度特性将图像划分为背景和目标2部分,划分依据为选取门限值,使得背景和目标之间的方差最大。
(背景和目标之间的类间方差越大,说明这两部分的差别越大,当部分目标被错划分为背景或部分背景错划分为目标都会导致这两部分差别变小。
因此,使用类间方差最大的分割意味着错分概率最小。
)这是该方法的主要思路。
其主要的实现原理为如下:1)建立图像灰度直方图(共有L个灰度级,每个出现概率为p)2)计算背景和目标的出现概率,计算方法如下:上式中假设t为所选定的阈值,A代表背景(灰度级为0~N),根据直方图中的元素可知,Pa为背景出现的概率,同理B为目标,Pb为目标出现的概率。
3)计算A和B两个区域的类间方差如下:第一个表达式分别计算A和B区域的平均灰度值;第二个表达式计算灰度图像全局的灰度平均值;第三个表达式计算A、B两个区域的类间方差。
4)以上几个步骤计算出了单个灰度值上的类间方差,因此最佳分割门限值应该是图像中能够使得A与B的类间灰度方差最大的灰度值。
在程序中需要对每个出现的灰度值据此进行寻优。
本人的VC实现代码如下。
[cpp]view plaincopyprint?1. /*****************************************************************************2. *3. * \函数名称:4. * OneDimentionOtsu()5. *6. * \输入参数:7. * pGrayMat: 二值图像数据8. * width: 图形尺寸宽度9. * height: 图形尺寸高度10. * nTlreshold: 经过算法处理得到的二值化分割阈值11. * \返回值:12. * 无13. * \函数说明:实现灰度图的二值化分割——最大类间方差法(Otsu算法,俗称大津算法)14. *15. ****************************************************************************/16.17. void CBinarizationDlg::OneDimentionOtsu(CvMat *pGrayMat, int width, int height, BYTE &nThreshold)18. {19. double nHistogram[256]; //灰度直方图20. double dVariance[256]; //类间方差21. int N = height*width; //总像素数22. for(int i=0; i<256; i++)23. {24. nHistogram[i] = 0.0;25. dVariance[i] = 0.0;26. }27. for(i=0; i<height; i++)28. {29. for(int j=0; j<width; j++)30. {31. unsigned char nData = (unsigned char)cvmGet(pGrayMat, i, j);32. nHistogram[nData]++; //建立直方图33. }34. }35. double Pa=0.0; //背景出现概率36. double Pb=0.0; //目标出现概率37. double Wa=0.0; //背景平均灰度值38. double Wb=0.0; //目标平均灰度值39. double W0=0.0; //全局平均灰度值40. double dData1=0.0, dData2=0.0;41. for(i=0; i<256; i++) //计算全局平均灰度42. {43. nHistogram[i] /= N;44. W0 += i*nHistogram[i];45. }46. for(i=0; i<256; i++) //对每个灰度值计算类间方差47. {48. Pa += nHistogram[i];49. Pb = 1-Pa;50. dData1 += i*nHistogram[i];51. dData2 = W0-dData1;52. Wa = dData1/Pa;53. Wb = dData2/Pb;54. dVariance[i] = (Pa*Pb* pow((Wb-Wa), 2));55. }56. //遍历每个方差,求取类间最大方差所对应的灰度值57. double temp=0.0;58. for(i=0; i<256; i++)59. {60. if(dVariance[i]>temp)61. {62. temp = dVariance[i];63. nThreshold = i;64. }65. }66. }阈值分割结果如下图,求解所得的阈值为116.2、一维交叉熵值法这种方法与类间最大方差很相似,是由Li和Lee应用了信息论中熵理论发展而来。
图像二值化阈值选取常用方法汇总
图像二值化阈值选取常用方法最近在公司搞车牌识别的项目,车牌定位后,发现对车牌区域二值化的好坏直接影响后面字符切分的过程,所以就想把常用阈值选取方法做一个总结。
图像二值化阈值选取常用方法:1.双峰法。
2.P 参数法。
3.最大类间方差法(Otsu 、大津法)。
4.最大熵阈值法。
5.迭代法(最佳阈值法)。
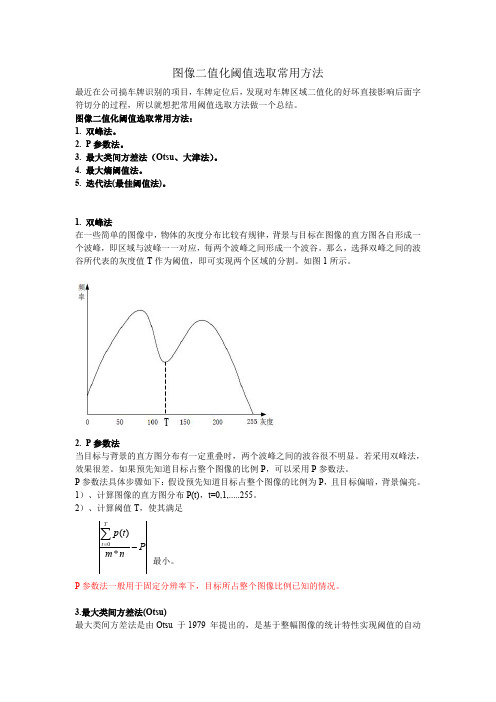
1.双峰法在一些简单的图像中,物体的灰度分布比较有规律,背景与目标在图像的直方图各自形成一个波峰,即区域与波峰一一对应,每两个波峰之间形成一个波谷。
那么,选择双峰之间的波谷所代表的灰度值T 作为阈值,即可实现两个区域的分割。
如图1所示。
2.P 参数法当目标与背景的直方图分布有一定重叠时,两个波峰之间的波谷很不明显。
若采用双峰法,效果很差。
如果预先知道目标占整个图像的比例P ,可以采用P 参数法。
P 参数法具体步骤如下:假设预先知道目标占整个图像的比例为P ,且目标偏暗,背景偏亮。
1)、计算图像的直方图分布P(t),t=0,1,.....255。
2)、计算阈值T ,使其满足0()*Tt p t Pm n =-∑最小。
P 参数法一般用于固定分辨率下,目标所占整个图像比例已知的情况。
3.最大类间方差法(Otsu)最大类间方差法是由Otsu 于1979年提出的,是基于整幅图像的统计特性实现阈值的自动选取的,是全局二值化最杰出的代表。
Otsu 算法的基本思想是用某一假定的灰度值t 将图像的灰度分成两组,当两组的类间方差最大时,此灰度值t 就是图像二值化的最佳阈值。
设图像有L 个灰度值,取值范围在0~L-1,在此范围内选取灰度值T ,将图像分成两组G0和G1,G0包含的像素的灰度值在0~T ,G1的灰度值在T+1~L-1,用N 表示图像像素总数,i n 表示灰度值为i 的像素的个数。
已知:每一个灰度值i 出现的概率为/i i p n N =;假设G0和G1两组像素的个数在整体图像中所占百分比为01ϖϖ、,两组平均灰度值为01μμ、,可得概率:00=T ii p ϖ=∑11011L i i T p ωω-=+==-∑平均灰度值:00T i i ipμ==∑111L ii T i p μ-=+=∑图像总的平均灰度值:0011μϖμϖμ=+类间方差:()()()22200110101()g t ωμμωμμωωμμ=-+-=-最佳阈值为:T=argmax(g(t))使得间类方差最大时所对应的t 值。
图像的阈值分割技术

目录摘要 (I)1 概述 (1)2 图像的阈值分割技术 (2)2.1阈值分割思想和原理 (2)2.2全局阈值分割 (2)2.3自适应阈值 (4)3 最佳阈值的选择 (4)3.1直方图技术 (4)3.2最大类间方差法(OTSU) (5)3.3迭代法 (7)4 心得体会 (10)参考文献 (11)摘要图像分割是一种重要的图像技术,在理论研究和实际应用中都得到了人们的广泛重视。
图像分割是从图像处理到图像分析的关键步骤,可以说,图像分割结果的好坏直接影响对图像的理解。
图像分割的方法和种类有很多,有些分割运算可直接应用于任何图像,而另一些只能适用于特殊类别的图像。
有些算法需要先对图像进行粗分割。
常见的分割方法有阈值分割、边缘检测、边缘跟踪、区域分裂与合并等。
关键在:图像分割,matlab,阈值分割1 概述对图像进行研究和应用时,人们往往对图像中的某些部分感兴趣,这些部分常被称为目标或对象(object )。
图像处理的重要任务就是对图像中的对象进行分析和理解。
在图像分析中,输出结果是对图像的描述、分类或其他结论,而不再像一般意义的图像处理那样——输出也是图像。
图像分割是将数字图像分成互不重叠的区域并提取出感兴趣目标的技术。
可见在图像特征提取之前重要的一部分工作就是图像分割,图像分割是图像识别和图像理解的基本前提步骤。
图像分割算法一般是基于灰度的两个性质之一:不连续性和相似性。
第一个性质的应用是基于灰度的不连续变化来分割图像。
第二个性质的主要应用是根据事先制定的准则将图像分割为相似的区域。
这两种方法都有各自的优点和缺点。
常见的分割方法有阈值分割、边缘检测、边缘跟踪、区域分裂与合并等,如图1-1所示。
图1-1 图像分割算法图像分割不连续性检测相似性检测边界分割边缘检测 边缘跟踪 Hough 变换区域分割阈值分割区域分裂与合并 自适应2 图像的阈值分割技术2.1 阈值分割思想和原理若图像中目标和背景具有不同的灰度集合:目标灰度集合与背景灰度集合,且两个灰度集合可用一个灰度级阈值T 进行分割。
otsu 双阈值算法
otsu 双阈值算法Otsu 双阈值算法是一种常用的图像分割算法,通过自动寻找图像的最佳阈值来实现图像的二值化处理。
该算法基于图像的灰度直方图,通过最大化类间方差来确定最佳阈值,从而将图像分成两个具有较大差异的部分。
在图像分割中,阈值的选择对于分割结果的质量有着重要的影响。
传统的手动选择阈值的方法往往需要人工经验,且不具备普适性。
而 Otsu 双阈值算法通过自动计算最佳阈值,从而消除了主观因素的干扰,提高了图像分割的准确性和效率。
Otsu 双阈值算法的核心思想是最大化类间方差。
在图像分割中,将图像分为背景和前景两部分,分别计算两部分的类内方差和类间方差。
类内方差表示同一部分图像像素灰度值的变化程度,而类间方差表示不同部分图像像素灰度值的差异程度。
通过最大化类间方差,可以找到最佳的阈值,将图像分为两个具有较大差异的部分。
具体实现上,Otsu 双阈值算法需要计算图像的灰度直方图,并根据直方图计算各个灰度级别的概率和累积概率。
然后,通过遍历所有可能的阈值,计算每个阈值对应的类内方差和类间方差,并选择使类间方差最大的阈值作为最佳阈值。
Otsu 双阈值算法的优点在于其简单且计算效率高。
由于不需要任何人工干预,因此可以广泛应用于各种图像分割场景中。
无论是自然图像、医学影像还是工业图像,都可以通过 Otsu 双阈值算法进行有效的分割。
然而,Otsu 双阈值算法也存在一些局限性。
首先,该算法假设图像中的前景和背景之间的灰度级别分布满足双峰分布,即存在两个明显的峰值。
如果图像的灰度级别分布不满足这个假设,算法的效果就会受到影响。
其次,算法只能将图像分为两个部分,如果需要将图像分成多个部分,就需要使用其他的图像分割算法。
Otsu 双阈值算法是一种简单且高效的图像分割算法,通过自动选择最佳阈值,实现图像的二值化处理。
尽管该算法存在一些局限性,但在实际应用中仍然具有广泛的适用性。
未来,随着图像处理技术的不断发展,相信 Otsu 双阈值算法将会得到更加广泛的应用。
阈值分割-最大类间方差法(OTSU)

最大类间方差法是由日本学者大津于1979年提出的,是一种自适应的阈值确定的方法,又叫大津法,简称OTSU。
它是按图像的灰度特性,将图像分成背景和目标两部分。
背景和目标之间的类间方差越大,说明构成图像的两部分的差别越大, 当部分目标错分为背景或部分背景错分为目标都会导致两部分差别变小。
因此,使类间方差最大的分割意味着错分概率最小。
function ostu,filequeryStatus = QUERY_IMAGE(file, fileInfo)if queryStatus eq 0 then beginResult = DIALOG_MESSAGE('图像格式不可识别!',/error,title='警告') return,0endifif (fileInfo.CHANNELS ne 1) then beginResult = DIALOG_MESSAGE('图像格式必须为8bit',/error,title='警告') return,0endifimgSize = fileInfo.dimensionsimg=READ_IMAGE(file)p=HISTOGRAM(img)p=p/(imgSize[0]*imgSize[1]*1.0)D=0.0T0=0 ;阈值for T=0,255 do beginp0=0.0 & m0=0for i=0,T do beginp0=p0+p[i]m0=m0+i*p[i]endform0=m0/p0p1=0.0 & m1=0for i=T+1,255 do beginp1=p1+p[i]m1=m1+i*p[i]endform1=m1/p1m=p0*m0+p1*m1D01=p0*(m0-m)^2+p1*(m1-m)^2if (D lt D01) then beginD=D01T0=Tendifendforprint,'ostu法阈值:'+strtrim(T0,2)img [WHERE (img le T0)] = 0img [WHERE (img gt T0)] = 255return, imgend;--------------------pro ostu_test,imagefileDEVICE, DECOMPOSED=1; 获取本程序所在文件路径RootDir = Sourceroot()if n_elements(imagefile) eq 0 then imagefile='man' file=RootDir+imagefile+'.bmp'imgSize = fileInfo.dimensionsimg=READ_IMAGE(file)ostuimg=ostu(file)WINDOW, /free, XSIZE = imgSize[0], YSIZE = imgSize[1] TV, imgend。
Ostu阈值分割(最大类间方差法)

Ostu阈值分割(最⼤类间⽅差法)#include "cv.h"#include "highgui.h"#include#includechar filename1[100];char filename2[100];char windowname1[100];char windowname2[100];int cvThresholdOtsu(IplImage* src) //Ostu的构造函数,返回阈值{int height=src->height;int width=src->width;int i;//histogramfloat histogram[256]={0};for(i=0;iunsigned char* p=(unsigned char*)src->imageData+src->widthStep*i;for(int j=0;jhistogram[*p++]++;}}//normalize histogramint size=height*width;for(i=0;i<256;i++) {histogram[i]=histogram[i]/size;}//average pixel valuefloat avgValue=0;for(i=0;i<256;i++) {avgValue+=i*histogram[i];}int threshold;float maxVariance=0;float w=0,u=0;for(i=0;i<256;i++) {w+=histogram[i];u+=i*histogram[i];float t=avgValue*w-u;float variance=t*t/(w*(1-w));if(variance>maxVariance) {maxVariance=variance;threshold=i;}}return threshold;}int main(int argc,char *argv[]){for (int i=1;i<6;i++){int threshold=-1;sprintf(filename1,"F:\\Halcon\\测试图像\\%d.jpg",i);//⽬标为原始图像sprintf(filename2,"F:\\Halcon\\测试图像\\Otsu%d.jpg",i);sprintf(windowname1,"window%d.jpg",i);sprintf(windowname2,"window2%d.jpg",i);IplImage* image1=cvLoadImage(filename1,CV_LOAD_IMAGE_GRAYSCALE);//读取灰度图像cvNamedWindow(windowname1,CV_WINDOW_AUTOSIZE);cvNamedWindow(windowname2,CV_WINDOW_AUTOSIZE);IplImage* image2=cvCreateImage(cvGetSize(image1),IPL_DEPTH_8U,1);if (threshold<0){threshold=cvThresholdOtsu(image1);}cvThreshold(image1,image2,threshold,255,CV_THRESH_BINARY);//使⽤前⾯所得的threshold进⾏阈值 cvShowImage(windowname1,image1);cvShowImage(windowname2,image2);cvSaveImage(filename2,image2);cvReleaseImage(&image1);cvReleaseImage(&image2);}cvWaitKey(0);cvDestroyWindow(windowname1);cvDestroyWindow(windowname2);return(0);}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最大类间方差法是由日本学者大津于1979年提出的,是一种自适应的阈值确定的方法,又叫大津法,简称OTSU。
它是按图像的灰度特性,将图像分成背景和目标两部分。
背景和目标之间的类间方差越大,说明构成图像的两部分的差别越大, 当部分目标错分为背景或部分背景错分为目标都会导致两部分差别变小。
因此,使类间方差最大的分割意味着错分概率最小。
function ostu,file
queryStatus = QUERY_IMAGE(file, fileInfo)
if queryStatus eq 0 then begin
Result = DIALOG_MESSAGE('图像格式不可识别!',/error,title='警告') return,0
endif
if (fileInfo.CHANNELS ne 1) then begin
Result = DIALOG_MESSAGE('图像格式必须为8bit',/error,title='警告') return,0
endif
imgSize = fileInfo.dimensions
img=READ_IMAGE(file)
p=HISTOGRAM(img)
p=p/(imgSize[0]*imgSize[1]*1.0)
D=0.0
T0=0 ;阈值
for T=0,255 do begin
p0=0.0 & m0=0
for i=0,T do begin
p0=p0+p[i]
m0=m0+i*p[i]
endfor
m0=m0/p0
p1=0.0 & m1=0
for i=T+1,255 do begin
p1=p1+p[i]
m1=m1+i*p[i]
endfor
m1=m1/p1
m=p0*m0+p1*m1
D01=p0*(m0-m)^2+p1*(m1-m)^2
if (D lt D01) then begin
D=D01
T0=T
endif
endfor
print,'ostu法阈值:'+strtrim(T0,2)
img [WHERE (img le T0)] = 0
img [WHERE (img gt T0)] = 255
return, img
end
;--------------------
pro ostu_test,imagefile
DEVICE, DECOMPOSED=1
; 获取本程序所在文件路径
RootDir = Sourceroot()
if n_elements(imagefile) eq 0 then imagefile='man' file=RootDir+imagefile+'.bmp'
imgSize = fileInfo.dimensions
img=READ_IMAGE(file)
ostuimg=ostu(file)
WINDOW, /free, XSIZE = imgSize[0], YSIZE = imgSize[1] TV, img
end。