三对角矩阵的转置
三阶矩阵行列式计算公式置换符号
三阶矩阵行列式计算公式置换符号
电子类互联网技术已经发展成为普及的日常应用,使许多枯燥的数学概念变得
更加生动有趣。
一个活跃在网络空间中的如今,基本数学计算技能是不可缺少的。
而一项如何计算三阶矩阵行列式的技术很受欢迎,如今被广泛运用。
三阶行列式是分析和解决方程组的重要工具,也是线性代数中一个重要的概念。
行列式在求解多元一次方程组中也很有效,计算根据置换符号公式(也称为“克拉默法则”),它以可视化的方式来解决一个三阶方阵的值,即计算出该方阵的行列式的值大小。
三阶矩阵行列式的计算公式根据置换符号,是以一个确定的规律来调整矩阵中
各个位置的数字,然后得到方阵的行列式的值。
计算的过程中,对每一行中的每一个数值,乘以相应的置换符号,将原本线性正序置换为逆序,最终将各行数乘积相加得到行列式的值。
三阶矩阵行列式计算,既有利又有弊。
优点是可以迅速有效地获得矩阵行列式
的值,有利于解决多元一次方程组;缺点也是显而易见的,那就是要对每一行的每一个数值进行乘积相加,容易让人感到浩如烟海、眼花缭乱,结果不必多说,计算时容易出现错误。
互联网技术已经颠覆了传统的学习方式,使得许多枯燥乏味的数学概念变得更
加生动有趣。
通过三阶矩阵行列式计算公式置换符号,不但可以解决多元一次方程组,还能够学习网络上数学知识,从而增强我们的学习效率。
三角矩阵在压缩存储下的转置矩阵源代码

#include<stdio.h>#include<stdlib.h>#define max 20#define zero 0typedef struct{int i,j,v;}node;typedef struct{node data[max];int m;}TSmatrix;TSmatrix *Setmatrix(){ //建三对角矩阵TSmatrix *T;T=(TSmatrix*)malloc(sizeof(TSmatrix));printf("请输入矩阵行数或列数:\n");scanf("%d",&T->m);printf("建立三对角矩阵:\n");for(int n=0;n<3*T->m-2;n++)scanf("%d%d%d",&T->data[n].i,&T->dat a[n].j,&T->data[n].v);return T;}TSmatrix *Trabsmatrix(TSmatrix *T){ //三对角矩阵转置int n,k,temp;TSmatrix *F;F=(TSmatrix*)malloc(sizeof(TSmatrix));F->m=T->m;for(n=0;n<3*T->m-2;n++){ //将结点信息存入新三元组表中temp=2*T->data[n].j+T->data[n].i; //计算待存入三元数组下标F->data[temp].i=T->data[n].j;F->data[temp].j=T->data[n].i;F->data[temp].v=T->data[n].v;}return F;}void TSmatrixout(TSmatrix *T){ //三对角矩阵输出int a,b,n;n=0;for(a=0;a<T->m;a++){for(b=0;b<T->m;b++){if(T->data[n].i==a&&T->data[n].j==b){printf("%-5d",T->data[n].v);n++;}elseprintf("%-5d",zero);}printf("\n");}}void main(){TSmatrix *T;T=Setmatrix();printf("三对角矩阵:\n");TSmatrixout(T);T=Trabsmatrix(T);printf("转置后三对角矩阵:\n");TSmatrixout(T);}问题分析:本程序要求实现对压缩存储下的三对角矩阵进行转置,为实现上述功能,需要解决的关键问题是三对角矩阵压缩存储及转置过程。
各类矩阵三角矩阵正定矩阵正交矩阵伴随矩阵
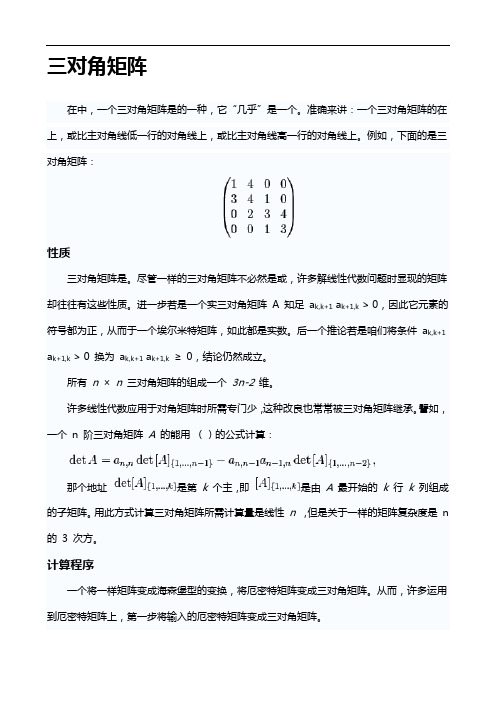
三对角矩阵在中,一个三对角矩阵是的一种,它“几乎”是一个。
准确来讲:一个三对角矩阵的在上,或比主对角线低一行的对角线上,或比主对角线高一行的对角线上。
例如,下面的是三对角矩阵:性质三对角矩阵是。
尽管一样的三对角矩阵不必然是或,许多解线性代数问题时显现的矩阵却往往有这些性质。
进一步若是一个实三对角矩阵A 知足a k,k+1 a k+1,k > 0,因此它元素的符号都为正,从而于一个埃尔米特矩阵,如此都是实数。
后一个推论若是咱们将条件a k,k+1 a k+1,k > 0 换为a k,k+1 a k+1,k≥0,结论仍然成立。
所有n×n三对角矩阵的组成一个3n-2维。
许多线性代数应用于对角矩阵时所需专门少,这种改良也常常被三对角矩阵继承。
譬如,一个n 阶三对角矩阵A的能用()的公式计算:那个地址是第k个主,即是由A最开始的k行k列组成的子矩阵。
用此方式计算三对角矩阵所需计算量是线性n,但是关于一样的矩阵复杂度是n 的3 次方。
计算程序一个将一样矩阵变成海森堡型的变换,将厄密特矩阵变成三对角矩阵。
从而,许多运用到厄密特矩阵上,第一步将输入的厄密特矩阵变成三对角矩阵。
一个三对角矩阵利用特定的比一样矩阵所用的存储空间也少得多。
例如,包将一个n-维非对称三对角矩阵存为三个1-维数列,其中一个长n包括对角元素,其它两个长为n−1 包括下对角线和上对角线元素。
三对角矩阵方程,能用一种需要O(n)次操作的解出来(Golub and Van Loan)。
正交矩阵概述正交矩阵是实数特殊化的,因此老是。
尽管咱们在那个地址只考虑实数矩阵,那个概念可用于其元素来自任何的矩阵。
正交矩阵毕竟是从内积自然引出的,关于复数的矩阵这致使了归一要求。
要看出与内积的联系,考虑在n维实数中的关于正交基写出的向量v。
v的长度的平方是v T v。
若是矩阵形式为Q v的线性变换维持了向量长度,那么。
因此有限维线性,比如、和它们的组合,都产生正交矩阵。
次对称三对角矩阵广义特征值反问题

2 4
21年6 01 月
第2 5卷 第 2期
次 对 称 三 对 角矩 阵广 义 特 征 值 反 问题
转 10得 到矩 阵 A 8。 :( +. +) , 为 A的次 0 1 。 称 转置 矩 降 若 A= , “ 那么称 A为 次对称 矩 阵 定义 12 . 设 A是 /阶 实次 对 称 矩 阵 , 果 / , 如
21 0 1年 6月 第2 5卷 第 2期
南 昌航空大学学报( 自然科学版 ) J U N LO A C A G H N K N NV R IY N T R LS IN E ) O R A FN N H N A G O G U I E ST ( A U A C E C S
次 对 称 三对 角 矩 阵广 义 特 征值 反 问题
林
( 昌航空 大学 ,江西 南 南昌 3 0 6 ) 30 3
惠
王金林
李
艳
[ 关键 词] 广义特征值 ; 广义特征 向量 ; 次对称矩阵 ; 次正定 [ 摘 要] 给定部分特征值及部 分特征向量 , 本文讨论 了次对 称三对 角矩 阵的广 义特征 值反 问题 , 给出 了问题可解 的条件 以
V R ,≠ , ∈ 0 都有 “x 0 则称 A次正定. A>,
定 义 13 设 A为 1阶方 阵 , 于 A 的前 行 . 7 , 位 和后 列 的子 式 叫做 A的 阶次 主子 式. 引理 1 设 矩 阵 P和 曰为 n阶 次对 称 矩 阵 , 且 次正 定 , 广 义 特 征 值 问题 P 则 x=A x的 特 征 值 B A , .A 。A … , 均 为 实 数 , 对 应 的 广 义 特 征 向 量 其
Ab t a t I h sp p r e d s u s d a v re p o l m fg n r ie ie v u o e mmer r g n t x b i i gp r f s c :n t i a e ,w ic se n i e s r b e o e e a z d e g n a e frp my r n l l t e t a o a mar y g vn ato i i l i
§4 Givens—Householder方法
中第j行和第j列的后n-j-1个元素都消为零.易知, Aj 1 的前j-1行和前j-1
列元素保持不变,且 A j为对称矩阵.如此继续进行n-2步便可将原
来矩阵A化为一个三对角对称矩阵. 现在,我们讨论从矩阵 Aj 1 到 A j 的计算过程.首先用 R( j 1, j 2)
及其转置分别左,右乘矩阵 Aj 1 ,将 Aj 1 的(j+2, j),(j, j+2)位置元
0 0 0 . j . . 0
第j步,用n-j-1个Givens旋转矩阵 R( j 1, j 2), , R( j 1, n) 及其转置依次
分别左,右乘矩阵 Aj 1 ,使乘积矩阵
A j R( j 1, n) R( j 1, j 2) A j 1 R( j 1, j 2)T R( j 1, n)T
素消为零.然后用R(j+1,j+3)及其转置分别左、右乘矩阵
R( j 1, j 2) Aj 1 R( j 1, j 2)T
将(j+3, j), (j, j+3)位置元素消为零,如此下去.假定每次计算所
得新元素 aij 仍然存放到A的(i, j)位置上,则矩阵
B R( j 1, i 1) R( j 1, j 3) R ( j 1, j 2) A j 1 R( j 1, j 2)T R( j 1, j 3)T R( j 1, j 2)T
R(1,2) x [ x 2 ,0,,0]T ,
其次,假设 x2 ,, xn 中至少有一个不为零.设 x2 0 ,则据定理1 可知,总存在R(1,2)使
R(1,2) x [ y1 ,0, x3 ,, xn ]T ,
追赶法求解三对角线性方程组

追赶法求解三对角线性方程组一 实验目的利用编程方法实现追赶法求解三对角线性方程组。
二 实验内容1、 学习和理解追赶法求解三对角线性方程组的原理及方法;2、 利用MA TLAB 编程实现追赶法;3、 举例进行求解,并对结果进行分。
三 实验原理设n 元线性方程组Ax=d 的系数矩阵A 为非奇异的三对角矩阵11222=(1)(n 1)()()a c b a c A a n c b n a n ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦………… 这种方程组称为三对角线性方程组。
显然,A 是上下半宽带都是1的带状矩阵。
设A 的前n-1个顺序主子式都不为零,根据定理2.5的推论,A 有唯一的Crout 分解,并且是保留带宽的。
其中L 是下三角矩阵,U 是单位上三角矩阵。
利用矩阵相乘法,可以1112212(1)1u(n 1)()()1l u m l u A LU l n m n l n ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⨯⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦……………得到:由上列各式可以得到L 和U 。
引入中间量y ,令yUx =,则有:已知L 和d ,可求得y 。
则可得到y 的求解表达式:11/12,3,,()(1)*y()=()[()(1)]/y d l i nm i y i li i di y i di m i y i li==-+=--…1111111/1(2)(1)(1)u (1)(11)/(1)(1)(1)l a l u c u c l mi bi i n a i m i i l i i n ci li ui ui ci li l i a i b i ui=*===≤≤+=+++≤≤-=∙=+=+-+Ax LUx Ly d Ly d ====1112222(1)(n 1)(n 1)()()(n)(n)l y d m l y d l n y d m n l n y d ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⨯=⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦……………由y Ux =得:111112221u(n 1)(n 1)(n 1)1(n)(n)u x y u x y x y x y ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⨯=⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦………… 可得到X 的求解表达式:()()1,2,,1()()u()(1)x n y n i n n x i y i i x i ==--=-+… 从而得到Ax=d 的解x 。
数学与应用数学专业论文三对角矩阵的逆的算法及matlab实现

2014届学士学位毕业论文三对角矩阵的逆的算法及MATLAB实现学号:12204431姓名:任荣珍班级:12级专升本班指导教师:崔艳星专业:数学与应用数学系别:数学系完成时间:年月学生诚信承诺书本人郑重声明:所呈交的论文《》是我个人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写的研究成果,也不包含为获得长治学院数学系或其他教育机构的学位或证书所使用过的材料。
所有合作者对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
签名:日期:论文使用授权说明本人完全了解长治学院数学系有关保留、使用学位论文的规定,即:学校有权保留送交论文的复印件,允许论文被查阅和借阅;学校可以公布论文的全部或部分内容,可以采用影印、缩印或其他复制手段保存论文。
签名:日期:指导教师声明书本人声明:该学位论文是本人指导学生完成的研究成果,已经审阅过论文的全部内容,并能够保证题目、关键词、摘要部分中英文内容的一致性和准确性。
学位论文指导教师签名:时间摘要三对角矩阵在现实生活中有很多的应用,因此三对角矩阵的计算近年来被广泛地研究。
分块周期三对角矩阵在科学和工程计算方面应用广泛,块三对角矩阵和分块带状矩阵在数学、物理和工程上的很多问题中都有重要的应用。
本文基于三对角矩阵的结构特点,给出了利用解线性方程组的方法、LU 分解的方法求三对角矩阵逆矩阵的新算法,这些新算法运算量小,节省内存,在整个计算过程中,只需要进行较少次的乘除运算,新算法比传统算法的计算复杂度和计算时间要低。
其次,通过算例来表示该算法的有效性和可行性。
最后,利用MATLAB编程来实现三对角矩阵逆矩阵的新算法。
关键词:分块周期三对角矩阵;块三对角矩阵;分块带状三对角矩阵;解线性方程组;LU分解法;逆矩阵;MATLABTriple diagonal matrix inverse algorithm andMATLABAbstractTriple diagonal matrix in real life there are many applications, so the triple diagonal matrix calculation was widely studied in recent years. Block periodic triple diagonal matrix is applied widely in science and engineering calculation, and the block triple diagonal matrix block banded matrices in mathematics, physics and engineering has important applications in many of the problems, in this paper, based on the structure characteristics of triple diagonal matrices, is given by using the method of solving linear equations, the recursive method, LU decomposition of the new method to calculate the inverse matrix of triple diagonal matrix algorithm, the new algorithm computational complexity is small, save memory, in the whole computing process, only needs less arithmetic, a new algorithm than the traditional algorithm of computing complexity and computing time.Second by an example to show the feasibility and effectiveness of the algorithm Finally, using MATLAB to realize the triple diagonal matrix inverse matrix of the new algorithmKey words:Block periodic triple diagonal matrix; Block-triple diagonal matrix; Block banded triple diagonal matrix; Solution of linear equations; LU decomposition method; inverse matrix; MATLAB.目录1.引言 (1)2.基础知识 (2)2.1 定义1[1] (2)2.2 定义2[2] (2)2.3 定义3[3] (2)3.分块周期三对角矩阵逆的新算法 (3)3.1 分块三对角矩阵的一些性质 (3)3.2 求分块周期三对角矩阵逆矩阵的新算法 (5)4.块三对角矩阵的逆的算法 (7)4.1 块三对角矩阵的一些性质 (7)4.2 块三对角矩阵的逆 (8)4.2.1 块三对角矩阵逆的性质 (8)5.三对角矩阵逆元素的表示 (10)5.1 一般三对角矩阵 (10)5.2 用解线性方程组的方法求三对角矩阵的逆的算法 (11)5.2.1[5]基本原理与算法 (11)5.2.2[5]三对角矩阵A的逆矩阵的算法 (13)6.三对角矩阵逆的算法的MATLAB实现 (14)7.结束语 (14)8.参考文献 (14)附录 (14)致谢 (14)1.引言1.1 课题来源及选题意义三对角矩阵是计算数学的重要组成部分。
中南大学数据结构与算法第5章数组和广义表课后作业答案
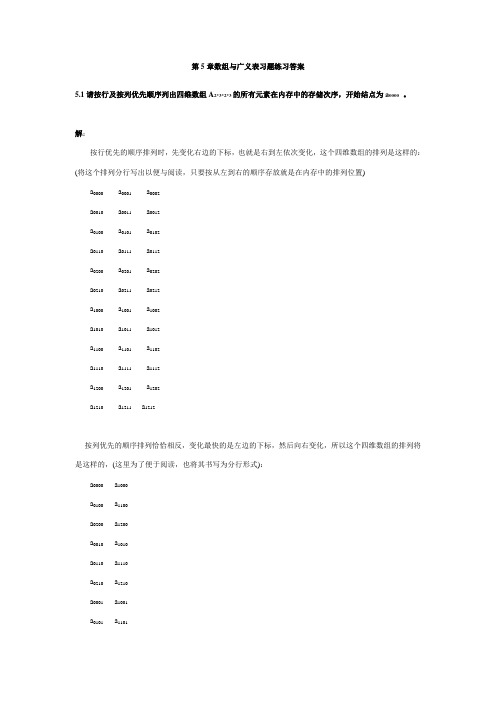
第5章数组与广义表习题练习答案5.1请按行及按列优先顺序列出四维数组A2*3*2*3的所有元素在内存中的存储次序,开始结点为a0000。
解:按行优先的顺序排列时,先变化右边的下标,也就是右到左依次变化,这个四维数组的排列是这样的:(将这个排列分行写出以便与阅读,只要按从左到右的顺序存放就是在内存中的排列位置) a0000a0001a0002a0010a0011a0012a0100a0101a0102a0110a0111a0112a0200a0201a0202a0210a0211a0212a1000a1001a1002a1010a1011a1012a1100a1101a1102a1110a1111a1112a1200a1201a1202a1210a1211a1212按列优先的顺序排列恰恰相反,变化最快的是左边的下标,然后向右变化,所以这个四维数组的排列将是这样的,(这里为了便于阅读,也将其书写为分行形式):a0000a1000a0100a1100a0200a1200a0010a1010a0110a1110a0210a1210a0001a1001a0101a1101a0201a1201a0011a1011a0111a1111a0211a1211a0002a1002a0102a1102a0202a1202a0012a1012a0112a1112a0212a02125.2 给出C语言的三维数组地址计算公式。
解:因为C语言的数组下标下界是0,所以Loc(A mnp)=Loc(A000)+((i*n*p)+k)*d其中Amnp表示三维数组。
Loc(A000)表示数组起始位置。
i、j、k表示当前元素的下标,d表示每个元素所占单元数。
5.3设有三对角矩阵A n*n,将其三条对角线上的元素逐行地存储到向量B[0...3n-3]中,使得B[k]=a ij,求:(1)用i , j 表示k的下标变换公式。
(2)用k 表示i,j 的下标变换公式。
三对角线矩阵法
精馏系统内的热量传递主要由潜热的变化引
起,由此也引起两相流率的变化,所以用热
量衡算方程,即H-方程来检验流率Vj是否正 确。
开始
规定设计变量 设定Tj、Vj初值 解三对角线矩阵方程,求xi,j
归一化xi,j
规定: 进料:Fj,zi,j,TFj,PFj 压力:pj 侧采:Uj,Wj 热负荷:Qj(除Q1和QN) 级数:N
2、Tj:(1)塔顶: 气相采出:露点温度 液相采出:泡点温度 气、液相混合:泡、露点之间的温度
(2)塔釜:釜液泡点温度 线性内插,得到中间各级温度初值。
二、归一化
由于求三对角矩阵方程时没有考虑S-eq.的约束, 必须对得到的xi,j归一化。
x
x=
i, j
i, j
C
Σx
i, j
i=1
三、泡点方程的计算 (实际就是S-eq.):
五、迭代收敛的标准
或更简单的:
泡点(BP)法 流率加和(SR)法
END
自学:等温流率加和法、同时校正法、内-外 法。 关注:非平衡级模型。
2、Tj:(1)塔顶: 气相采出:露点温度 液相采出:泡点温度 气、液相混合:泡、露点之间的温度
(2)塔釜:釜液泡点温度 线性内插,得到中间各级温度初值。
二、流率加和法计算新的Lj,Vj
由S-eq.导出流率加和方程:
L(jk +1)
=
C
L(jk
)Σ
i =1
x
i
,
j
L(k )由物料衡算式(6-10)从Vj(k)算出:
i,j j-1 i,j-1 j+1 i,j+1 j i,j j j i,j j j i,j
E-eq.
三阶矩阵的转置 逆矩阵行列式

三阶矩阵的转置逆矩阵行列式1.引言1.1 概述概述部分将介绍本篇文章的主题和主要内容。
本篇文章将探讨关于三阶矩阵的转置,逆矩阵和行列式的相关知识。
在线性代数中,矩阵是一个重要的概念,被广泛应用于各个领域。
其中,三阶矩阵是最简单且常见的一种矩阵类型。
转置、逆矩阵和行列式是三阶矩阵的重要性质和计算方法,对于矩阵的运算和分析起着关键作用。
在本文的第一部分,我们将探讨三阶矩阵的转置。
转置是矩阵运算中常见的一种操作,可以通过交换矩阵的行和列来得到新的矩阵。
我们将介绍转置的定义和性质,并提供三阶矩阵转置的具体计算方法。
在第二部分,我们将研究三阶矩阵的逆矩阵。
逆矩阵是指对于一个可逆矩阵A,存在一个矩阵B,使得A与B的乘积等于单位矩阵。
我们将介绍逆矩阵的定义和性质,并提供三阶矩阵逆矩阵的计算方法。
最后,在第三部分,我们将研究三阶矩阵的行列式。
行列式是一个与矩阵相关的重要概念,用于计算矩阵的特征值和特征向量。
我们将介绍行列式的定义和性质,并提供三阶矩阵行列式的具体计算方法。
通过全面了解三阶矩阵的转置、逆矩阵和行列式,我们可以更好地理解和应用矩阵运算。
本文旨在为读者提供一个清晰的概念和计算方法,并帮助读者在实际问题中运用到这些知识。
希望读者通过阅读本文能够对三阶矩阵的转置、逆矩阵和行列式有更深入的理解。
1.2文章结构文章结构部分的内容可以包括以下内容:在文章结构部分,我们将介绍本文的组织结构,以帮助读者更好地理解和阅读本文。
本文主要分为两个部分:正文和结论。
正文部分将围绕三阶矩阵的转置、逆矩阵和行列式展开讨论。
首先,我们将介绍三阶矩阵的转置,包括其定义和性质。
然后,我们将详细介绍三阶矩阵转置的计算方法。
接下来,我们将转向三阶矩阵的逆矩阵,在这一部分中,我们将讨论逆矩阵的定义和性质,并探讨三阶矩阵逆矩阵的计算方法。
最后,我们将进入三阶矩阵的行列式部分,包括行列式的定义和性质,以及三阶矩阵行列式的计算方法。
在结论部分,我们将简要总结本文的内容,并提出一些结论和观点。
三对角矩阵计算
三对角矩阵计算1997年6胃一社E擘高等学校计算数学奢芊盱第z期,聊\/P,三对角矩阵计算唐达(上海电机每科学校数学系,上海200240)TRIDIAGONALMA TRIXCALCULUSTangDa(ShanghaiElec~iealMachineryCollege)AbstractInthispaper,weeoas/derthefollow~.ngeompudngmethodoftridiag onalmatrix:(1)decouplingoflinearequation;(2)determinationofdeterminantandeigenvalue—eigenvectorrelation(3)matrixinversion. Thealgorithminthispaperpossessesatleastofleoftheadvantagessuchasfew- eroperating,lessmemorycapacity,higherprecisionorprogrammingsimplifieomparwiththecurrentmethods.KeywordsTrldiagonalmatrix,~‟-vector,Z-~Ctordecoupling,inversematri x?AMS(1g91)Subjectelasslflcatlons15A57.中圈法分类号O151.21引言在效值计算中,有许多问题最后归结为三对角矩阵的计算,因此研究它们的计算方法是有意义的.此外,有些三对角阵的计算方法可以做为带状阵计算的借鉴.本文讨论三对角线性方程组的解耦算法.矩阵的LR-分解,求行列式,Jacobi矩阵的特征值与特征向量的关系以及三对角阵求逆等方面的问题.与现有的算法比较,本文的算法具有计算量或存贮量较少,或计算精度较高,或编程较简单等某些特点.设A为阶非奇实三对角阵:收藕日期:1995一O5—25.吖七,f,)-/,,r¨,,,,●J●一,f唐选;三对角矩阵计算第2期£=(,,…,).当c≠0(1,2|..?,n一1)时,向量t按下述递推关系算得ft.一口0=1或不为零之实数),t2=一bitl/cI,(2)【t=一(乌一l一l+61£‟一I)16-1(1=3,4...-,n).这样的向量称之为对应的)f向量.令At一2.(3)式中==(,≈,…,),称为对应的)z向量.由(2)式知,除≠0外,z向量的其余分量均为零.我们称z向量中不为零的分量为尾分量.上面定义的£向量是右乘A.同样,如果≠0(1=2,3?,n),也可以定义左乘A的屯?A=.(4)式中屯(£El,,…,)t2E(zh,‟...,)均是行向量.向量中只有尾分量£≠0.求屯向量的递推关系与(2)式相仿,此不多述.为了与屯向量对应,有时也将(3)式中的t向量记为.如果令()向量中第f(1≤f<)十分量以后的分量全为零,这种向量记为().此时相应的2()向量中只有二十相邻的分量(即尾分量)墨,而+l≠0,(‰.,.≠0)?由(2)式知,所对应的f向量,z向量除可相差一比饲常数外,是唯一确定的.隶t向量的计算量(抬乘除法的计算次数,下同)为3一.对某些对角占优的三对角阵t文[1]指出,t向量的分量按指数规律增大.更一般地讲.如果的元索为区间(--5,5)中均匀分布的随机数,数值试验表明.t向量的分量平均也按指数规律增大?当试验次数充分多时,t中后一十分量比相邻前一十分量平均增大刭1.57倍左右(绝对值)?这是由大量数据四则运算的统计规律决定的.因此在计算t向量时要防止机器溢出.t向量是一个有用的工具,它可以使算式和演绎大为简化.下面利用它来进行一些矩阵计算.\,,.,●一1lA量向维n为1997年6月高等学校计算数学2三对角线性方程组的解耦,系数阵的LR-1分解文[2]指出,对大型三对角方程组采用解耦算法可避免产生太的误差.故这里也给出一种解耦算法.设血=(5)式中为维未知向量,f为方程组的右端常数项向量,A非奇且次对角线上无零元?令矩阵R(厶)为n阶单位阵将第i列(行)换为f()后所得的阵.即尼=,厶=11ttz:…第行(6)令=厶AR-A与R相乘的结果,除第f列外,其余各元素均与A相同I 在第f列上,第i一1个分量变成了零,第f及f+1个分量变成了尾分量.同样,然后厶左秉的结果,使矩阵A在f行上第f一1个分量变为零.故=L4R=01c1第f行…第列(7)可见除第i行第i列外,其余元素均与A相同.这样便把A变换成具有z4”~t角块的三对角阵.为了使(7)式中新生成的6r,及与中的其它元素大小接近,可按比倒调整f向量使(6)式的及接近1-夸一;』,1-...编,,,.,“,_4;O,100唐达.三对角矩阵计算第2期P—LJ,则方程(5)可写成,=,.因此便把方程(5)解耦成二个独立的方程来求解.若A为对称阵,显然有£=().故R=,所以变换后的矩阵A亦为对称阵. 以上是将(5)变换成二个独立的方程.同样,若要将方程(5)变换戚,,-+1个独立的方程,则可令AL1…L一.L_AR_一,…R.?(8)式中l<i<<…<‟一<‟≤.而().文[2]中给出的三对角方程组的解耦算法,需要附带解一个降了阶的,带宽为5的稀疏带状方程组.在(8)式中令=(一2,3…,n一1.n),则就变成对角阵D.这样便得到了A 的£I1DRI1分解.在(10)的右端如果不乘厶并令AR=L,可知L是二对角的下三角阵.这样便得到A的LR分解;A一(AR)R-;LR~.(11)3求行列式,Jacobi矩阵的特征位与特征向量的关聂求detA时,不妨设c≠0(l,2‟.-?,n--1),否则可按~plac,定理展开成子行,日式来忤算.此时应先求出对应的t向量.令Q为单位阵将第一列换为t后的矩阵.印夸Q;l1●:B—AQ.(12)]●●●●1997年6月高等学校计算数学10l则B除第一列外,其余元素均与A相同.在B的第一列上,只有第个元素不为零,是尾分量.对(12)式两端求行列式.detB=detA?detQ.将detB按第一列展开,并注意到detQ=1,就得A之行列式的计算公式detA=(一1)+l?.Tic,.(13)1列递推关系求得:.;口0≠O),{,.一l=一b./a.?,.,(16)『I皇一(6.+l?t件l+a+l?tf1),dI+1(1≤i≤一2)与前述一样,令At=zJ,则2,向量中只有尾分量(第一个分量)≠O.在向量中如令第f(2≤:n)个分量以前的分时均为零.这种向量记为,,其对应的尾分量为.-.. 向量l”…及t”.所对应的尾分量分别为,及,令一..._.,作向量1O2唐选;三对角矩阵计算第2期则向量”…只有第i个分量不为零,它为面是距主对角线衰减的.如果A不是强主元矩阵,饲如A的元素为区间(一.5,5)中均匀分布的随机数,则如前所述,此时I肛l 的平均值约为1.57,即逆阵的元素距主对角线的衰减率平均为1.57.因此一般来讲,求A-1时,只要计算主对角线附近的元素,离对角线较远的元素之值将趋于零.当很大时,这就节省了很多运算量及存贮量.由(21)式可见,A_1的结构是很简单的.(因而也就是t及,)的性态,决定了A-1的性态?A_1的第行(列)及第f+1行(列)的元素,除an,嘶-f+l,nm口ff+】四个紧靠主对角线的元素外,其余元素均两两成固定比倒.这说明如果任意给出A的3n-2个元素,则A的个元素不能任意给出,它们间必须遵循上述的比倒规律.由(21)式计算A的个元时,求i;.及的四则运算量为o(n),它们相除(乘)的运算量为..故求一的全部元素,其乘除法运算量为+o(n),加减法运算量仅为0().文[4],[5]及其列出的参考文献中也曾讨论过三对角阵的逆阵的算法.文[4]算法的运算量为2n.+.(一).文[5]的算法,对于非对称阵,先按该文定理2求出逆阵的下三角部分元素,如果安排得好,其运算量为+o(n).然后按引理5并化俺后隶出逆阵的上三角部分元素,其运O一…一“,●●●●,●【一∞一}lgg?年6月高等学校计算教学103算量亦为+.(n).故总的运算量为2n+.(n).无论是文[4]或文[5],均未给出A-I的结构5误差分析,数值实验前面述及的种种算法,均建立在l向量的基础上.因此,这里主要讨论计算£向量的浮点误差分析.由(z)式可得f一f查一?tl-z+一?一的位散即可.如果位致明显减少,则说明产生了数字的对消.如果在计算时t向时有一个分量产生严重对消,不一定使尾分量不精确I如果向量有相邻二个分量不精确,则一定导致尾分量的不精确.当发生这种情况时,可以类似于解方程组的迭代改善方法…来使有效位增加.本文提出的方程组解耦,求行列式及求逆矩阵等的算法,只是在l向量算出后再增加一些四则运算.可以证明它们都是向后稳定的算法.同理,文[5]求逆阵的算法也是向后稳定的.l04唐达:三对角矩阵计算第说明相对误差是小的..参考文献l萨乌里耶夫(袁兆鼎译),抛物型方程的冈格积分法,北京科学出版社.1963,l72一l73.2宋晓秋,袁兆鼎,刘穗贵,求解线性三对角方程组的解耦分解方法,系统工程与电子技术,12(199O),No.5,29—34.3蒋尔雄,对称矩阵计算,上海:上海科学技术出版社,1984,52—55.4陈增荣,任意三对角阵求逆,数值计算与计算机应用,8(1987),No.3,158--164.5Usmain,R.A.,Inverslon0fJaeobi‟sTKdiagomlmatrix,Comput.Math.App 1.,27(1994).No.8.59—66.6曹志浩等,矩阵计算和方程求根,第二版.北京;高等教育出版社,1987,30—46.。
三对角方程组行处理法分布式并行算法
I TD: I —C R
( f =A2, s= ̄a 6, 1【 1, 3; ) r( )S s 6 : = x= )
∥ 将 =6划分成 3 个子方程组 S ( X):6, :口 ,
. s+3/一1 ( )= i_ 12 … ,n3 / , 『= ,, 厂 /7/
r l ,,) ∥ ∈ e( £ ; a ̄ , 0<£ 1 《 , N∥ ∈
sn i bg )m r g c s 1≤ S≤ 3 e d( ei e et e hV : s n oa ; sn X ) s g o朗c s 1≤ S≤ 3 ed(o mes et a hv : ; u o ei n l( s m朗c s1≤ S≤ 3 pnr e kga X ) e v l hv :
维普资讯
20 02年 9月 第2 5卷 第 5期
四川师 范大学学报 ( 自然科学 版 )
Ju a o S h a o l nvr t N tr c ne or l f i unN r i sy a a Si c) n c ma U e i ( u l e
分条件是 r kA)=r k [ 6 ) a ( n a (A I ] . n 文[] 明了定理 2并且指出两点 : 1证 ,
作者简介 : 晓彬(9 7)女 , 师 祁 16 ., 讲
维普资讯
48 8
四川师 范大学学报 ( 自然科学版 )
本文 在 实 数 域 中讨 论 . ( , ) 用 ・ ・ 表示 两 向量 的
对每一子方程组取相 同迭代初值 ∥
( )fr a hS: 3 o c 1≤ S ≤ 3p rd e aa o
yO= Xk
'
三对角矩阵的lu分解

三对角矩阵的lu分解三对角矩阵的LU分解是矩阵分解的重要一个分支,其特征在于矩阵的非零元素只存在于主对角线及其相邻的一些对角线上。
该分解法广泛应用在科学计算领域,旨在将矩阵特征分解为一个低阶矩阵和一个高阶矩阵,从而简化数值计算。
一、前提知识在深入介绍三对角矩阵的LU分解之前,需要了解以下的基础知识:1. 向量的内积和模长:向量的模长指向量的长度,可以通过数学公式计算。
而向量内积是指一个向量的每个分量与另一个向量的对应分量相乘后相加,如下所示:$u\cdot v = \sum_{i=1}^na_ib_i$2. 矩阵的转置与行列式:矩阵的转置是指将矩阵的行和列交换后所得到的矩阵。
而行列式是指一个矩阵中各个元素所构成行列式的值,是一个标量。
3. 矩阵的行列变换:矩阵的行列变换是指对矩阵的某行或某列进行加减乘除等操作所得到的矩阵,这种变换可以改变矩阵的行列式和特征向量。
二、三对角矩阵三对角矩阵又叫做带状矩阵,是指矩阵中除了主对角线和它两侧相邻的两条对角线以外,其他的元素都为零的矩阵。
例如下图就是一个三对角矩阵:$\begin{bmatrix} a_{11} & a_{12} & 0 & \cdots & \cdots & 0 \\ a_{21} & a_{22} & a_{23} & 0 & \cdots & \vdots \\ 0 & a_{32} & a_{33} & a_{34} & \cdots & \vdots \\ \vdots & \ddots & \ddots & \ddots &\ddots & 0 \\ \vdots & & \ddots & a_{n-1,n-2} &a_{n-1,n-1} & a_{n-1,n} \\ 0 & \cdots & \cdots & 0 & a_{n,n-1} & a_{nn} \\ \end{bmatrix}$三对角矩阵的行列式可以快速计算,可以得到如下公式:$det(A)=a_{11}a_{22}a_{33}...a_{nn}-a_{21}a_{32}a_{43}...a_{n-1,n}a_{n,n-1}$三、三对角矩阵的LU分解三对角矩阵的LU分解是指将一个三对角矩阵分解为一个下三角矩阵和一个上三角矩阵的乘积,公式如下:$A=L\cdot U$其中,L是下三角矩阵,U是上三角矩阵。
三对角矩阵的压缩存储公式推导

三对角矩阵的压缩存储公式推导标题:深入探讨三对角矩阵的压缩存储公式推导在线性代数和数值计算中,三对角矩阵是一类特殊的矩阵,它在科学计算、工程问题和物理建模中有着广泛的应用。
三对角矩阵的压缩存储公式是对其特殊结构的一种有效利用,本文将深入探讨三对角矩阵的性质以及推导其压缩存储公式,帮助读者更好地理解和应用这一重要概念。
一、三对角矩阵的定义及性质三对角矩阵是指除了主对角线上的元素外,只有相邻对角线上的元素不为零的矩阵。
它具有以下的性质:1. 三对角矩阵是一种特殊的带状矩阵,具有较强的结构性质;2. 由于其大部分元素为零,因此可以采用压缩存储方式来节省存储空间;3. 在数值计算中,三对角矩阵往往会出现在线性方程组的求解、差分方程的离散化、特征值计算等问题中,因此了解其压缩存储公式对于优化算法和提高计算效率具有重要意义。
二、三对角矩阵的压缩存储公式推导三对角矩阵的压缩存储公式是一种基于其特殊结构的存储方式,可以将其非零元素存储在一个更小的数组中,从而节省存储空间和提高计算效率。
下面我们将对三对角矩阵的压缩存储公式进行推导。
假设我们有一个n阶的三对角矩阵A,其一般形式如下:\[ A = \begin{pmatrix} a_1 & b_1 & 0 & 0 & \cdots & \cdots & 0 \\ c_1 & a_2 & b_2 & 0 & \cdots & \cdots & 0 \\ 0 & c_2 & a_3& b_3 & 0 & \cdots & 0 \\ \vdots & \vdots & \ddots & \ddots & \ddots & \vdots & \vdots \\ 0 & \cdots & \cdots & c_{n-2} &a_{n-1} & b_{n-1} & 0 \\ 0 & \cdots & \cdots & \cdots & c_{n-1} & a_n \end{pmatrix} \]为了压缩存储这个矩阵,我们可以使用两个数组来存储非零元素,一个数组存储矩阵的对角线上的元素,另一个数组存储矩阵相邻对角线上的元素。
三对角行列式的计算
三对角行列式的计算卢潮辉【摘要】三对角行列式是一类特殊而常见的行列式,其计算灵活多样,本文给出三对角行列式的几种特殊的计算方法.【期刊名称】《漯河职业技术学院学报》【年(卷),期】2010(009)002【总页数】3页(P51-53)【关键词】三对角行列式;递推法;差分法;数学归纳法【作者】卢潮辉【作者单位】揭阳职业技术学院数学与计算机科学系,广东,揭阳,522051【正文语种】中文【中图分类】O151.21行列式是高等代数的重要内容之一,其计算灵活多样。
三对角行列式是一类特殊而常见的行列式,在线性代数、组合数学、计算数学以及工程技术中都有广泛的应用,因而三对角行列式的计算一直受到人们的关注[1-3]。
形如的n阶行列式叫做三对角行列式。
以下给出三对角行列式的几种计算方法。
递推法可分为直接递推和间接递推。
用直接递推法计算行列式Dn的关键是找出一个关于的代数式来表示Dn,依次从逐级递推便可以求出Dn的值;间接递推的做法是,借助于行列式中元素的对称性,交换行列式构造出关于Dn和Dn-1的方程组,从而消去Dn-1就可解得Dn。
例1 计算n阶行列式解将Dn按第一列展开得设α,β为一元二次方程x2-ax+bc=0的根,则且有α+β=a,α β=bc,代入(1)式,得由此递推下去,有由于因此有同理可得当α≠β,即α2≠4bc时,则由(3)·α-(2)·β得当α=β,即a2=4bc时,有则由(2)得以上结果可作为公式应用。
首先由行列式Dn得到一个一般的递推公式Dn=pDn-1+qDn-2,然后把该关系式看作一个差分方程,求出特征方程λ λ2-pλ-q=0的两个根λ1、λ2,则Dn=+,(λ1≠λ2)或Dn=(λ1=λ2),最后从由D1、D2得到的一个方程组中解出常数C1,C2,从而求出行列式Dn的值。
例3 计算n阶行列式解按第一列展开得即有递推关系式Dn=(a+b)Dn-1=abDn-2 (n≥3),令p=a+b,q=-ab。
三阶反对称矩阵的一组基

三阶反对称矩阵的一组基三阶反对称矩阵是线性代数中的一个重要概念,它在许多领域有着广泛的应用。
本文将从基本概念、性质和应用三个方面来探讨三阶反对称矩阵的一组基。
一、基本概念三阶反对称矩阵是一个3x3的方阵,满足矩阵的转置等于矩阵的相反数。
具体地说,对于三阶反对称矩阵A,有A^T = -A。
换句话说,矩阵的第i行第j列元素等于第j行第i列元素的相反数。
二、性质1. 三阶反对称矩阵的对角线元素都为0。
这是因为矩阵的转置不改变对角线元素,而矩阵的相反数对角线元素的相反数,因此对角线元素必须为0。
2. 三阶反对称矩阵的非对角线元素具有一定的对称性。
具体地说,对于非对角线元素a_ij,有a_ij = -a_ji。
3. 三阶反对称矩阵的行向量线性无关。
由于矩阵的每一行都是一个向量,根据矩阵的反对称性质,可以证明这三个向量线性无关。
三、应用1. 物理学中的角动量:在经典力学和量子力学中,角动量是研究物体旋转运动的重要概念。
三阶反对称矩阵在描述角动量算符时经常出现,它可以用于计算角动量的各个分量。
2. 电磁学中的磁场:根据麦克斯韦方程组,电磁场可以用矢量场的形式来描述。
其中,磁场被定义为一个三维矢量,可以用三阶反对称矩阵来表示。
3. 控制工程中的姿态控制:在飞行器和机器人的姿态控制中,需要对其姿态进行测量和控制。
姿态通常由旋转矩阵来表示,而旋转矩阵可以通过三阶反对称矩阵来计算。
三阶反对称矩阵的一组基是线性代数中的重要概念。
它具有一些基本性质,如对角线元素为0、非对角线元素具有对称性等。
三阶反对称矩阵在物理学、电磁学和控制工程等领域都有广泛的应用。
通过深入研究和理解三阶反对称矩阵的一组基,我们可以更好地应用于实际问题的求解和分析中,提高问题的解决效率和准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
//三对角矩阵压缩存储下在的转置.
#include <stdio.h>
#include <malloc.h>
#define size 100
typedef struct
{int a[size][size];
}Sql1;
typedef struct
{int s[size];
}Sql2;
Sql1 *Input(Sql1 *A,int n);//输入的子函数
Sql2 *Storage(Sql1 *A,Sql2 *S,int n);//存储的子函数void Transpose(Sql2 *S,int n); //转置的子函数
void Output(Sql2 *S,int n); //输出地函数
void Output1(Sql2 *S,int n);
void main()
{int n;
Sql1 *A=NULL;
Sql2 *S=NULL;
printf("请输入矩阵的阶数:");
scanf("%d",&n);
A=Input(A,n);
S=Storage(A,S,n);
Output1(S,n);
Transpose(S,n);
Output(S,n);
}
Sql1 *Input(Sql1 *A,int n)
{int i,j;
A=malloc(sizeof(Sql1));
printf("请输入三对角矩阵的元素:\n");
for(i=0;i<n;i++)
for(j=0;j<n;j++)
scanf("%d",&A->a[i][j]);
return A;
}
Sql2 *Storage(Sql1 *A,Sql2 *S,int n)
{int i,j;
S=malloc(sizeof(Sql2));
for(i=0;i<n;i++)
for(j=0;j<n;j++)
{if(A->a[i][j]!=0)
S->s[2*i+j]=A->a[i][j];
}
free(A);
return S;
}
void Transpose(Sql2 *S,int n)//转置{int i,t;
for(i=1;i<3*n-2;i=i+3)
{t=S->s[i];
S->s[i]=S->s[i+1];
S->s[i+1]=t;
}
}
void Output1(Sql2 *S,int n)
{int i,j=n;
printf("转置前的对三角矩阵:\n"); for(i=0;i<3*n-2;i++)
printf("%d ",S->s[i]);
printf("\n");
}
void Output(Sql2 *S,int n)
{int i,j=n;
printf("转置后的三对角矩阵:\n"); for(i=0;i<3*n-2;i++)
printf("%d ",S->s[i]);
printf("\n");
}。