论文_三对角矩阵的简单计算
求实对称三对角矩阵的特征值和特征向量

求实对称三对角矩阵的特征值和特征向量要求求解一个实对称三对角矩阵的特征值和特征向量。
在介绍如何求解之前,首先我们来了解一下实对称三对角矩阵的定义。
实对称三对角矩阵是指矩阵的非零元素主对角线上的元素为a,副对角线上的元素为b,而其他元素均为0。
可以表示为如下形式:[a1b100...0][b1a2b20...0][0b2a3b3...0][00b3a4...0][..................][ 0 0 0 ... bn-1 an ]下面我们将介绍如何求解实对称三对角矩阵的特征值和特征向量。
求解实对称三对角矩阵的特征值和特征向量有多种方法,其中一种常用的方法是通过迭代法,特别是Householder迭代法。
下面我们将介绍这种方法的主要步骤。
1. 首先,将实对称三对角矩阵转化为对称上Hessenberg矩阵。
对称上Hessenberg矩阵是一个具有类似三对角矩阵结构的对称矩阵。
2. 在转化得到的对称上Hessenberg矩阵上应用QR迭代,不断迭代直到矩阵的对角线元素基本上收敛于特征值。
3. 在每次QR迭代中,我们通过施密特正交化方法(Gram-Schmidt orthogonalization)来构建Q矩阵,然后计算出新的矩阵R,并将其与Q相乘,得到下一次迭代的矩阵。
4.在QR迭代的最后一步,我们得到了一个上三角矩阵,其对角线上的元素即为所求的特征值。
5. 然后,我们可以通过反复应用幂迭代法(power iteration method)来求解对应于这些特征值的特征向量。
幂迭代法是一种求解线性代数特征向量的数值方法。
通过上述方法,我们可以求解实对称三对角矩阵的特征值和特征向量。
这种方法具有较高的数值稳定性和计算效率,因此在实际求解中被广泛采用。
需要注意的是,在特征值和特征向量的计算过程中,可能会出现一些特殊情况。
比如矩阵中的主对角线元素不是严格递增或递减的时候,对于这种情况,我们需要进行一些额外的处理。
三对角行列式计算公式推导
三对角行列式计算公式推导要推导三对角行列式的计算公式,我们首先需要定义三对角矩阵。
一个n×n的矩阵A是三对角的,如果它的非零元素只在主对角线上以及位于主对角线上方和下方的相邻两条对角线上。
一个三对角矩阵的一般形式如下:a1b10c2a2b200c3a3b3...0 0 cn an bn其中,ai, bi 和 ci 分别表示第i个主对角线和位于主对角线上方和下方的对角线元素。
det(A) = a1 * a2 * a3 * ... * an - 1 * an - (b1 * c2 * a2 * a3 * ... * an - 1) - (b2 * c3 * a3 * a4 * ... * an - 1) - ... - (bn - 2 * cn - 1 * an - 1 * an)推导过程如下:设三对角矩阵A的行列式为det(A)。
我们可以通过对A的第一列使用行列式展开式来推导det(A)的计算公式。
根据行列式的定义,展开式如下:det(A) = a1 * M11 - b1 * M12其中,M11是去除A的第一行和第一列后的(n-1)×(n-1)的子矩阵的行列式,M12是去除A的第一行和第二列后的(n-1)×(n-1)的子矩阵的行列式。
我们可以继续展开M11 和 M12 的行列式,直到展开到1×1 的子矩阵。
在展开的过程中,我们会发现只有b1 * c2 * ... *bn - 1 * an - 1 这一项才会保留下来。
通过这个过程,我们可以得到以下递推关系:det(A) = a1 * M11 - b1 * M12=a1*(a2*M21-b2*M22)-b1*(c2*M21-a2*M23)=a1*a2*M21-a1*b2*M22-b1*c2*M21+b1*a2*M23=a1*a2*M21-a1*b2*M22+a2*b1*M23-b1*c2*M21继续展开,我们得到:det(A) = a1 * a2 * M21 - a1 * b2 * (a3 * M31 - b3 * M32) + a2 * b1 * (c3 * M32 - a3 * M33) - b1 * c2 * M21-a1*b2*a3*M31+a1*b2*b3*M32-a2*b1*c3*M33这一过程可以继续下去,直到展开到最后一个(n-1)×(n-1) 子矩阵的行列式,此时我们只剩下最后一个主对角线上的元素an。
三对角矩阵计算
三对角矩阵计算
唐达
【期刊名称】《高等学校计算数学学报》
【年(卷),期】1997(19)2
【摘要】1 引言在数值计算中,有许多问题最后归结为三对角矩阵的计算,因此研究它们的计算方法是有意义的。
此外,有些三对角阵的计算方法可以做为带状阵计算的借鉴。
本文讨论三对角线性方程组的解耦算法,矩阵的LR^(-1)分解,求行列式,Jacobi矩阵的特征值与特征向量的关系以及三对角阵求逆等方面的问题,与现有的算法比较,本文的算法具有计算量或存贮量较少,或计算精度较高,或编程较简单等某些特点。
设A为n阶非奇实三对角阵:
【总页数】8页(P97-104)
【关键词】三对角矩阵;数值计算;矩阵;误差分析
【作者】唐达
【作者单位】上海电机专科学校数学系
【正文语种】中文
【中图分类】O241.6
【相关文献】
1.三对角线性方程组的循环规约对角占优算法 [J], 李太全;肖柏勋
2.严格对角占优的对称块三对角矩阵的逆 [J], 连培培;畅大为
3.求三对角和周期三对角矩阵逆矩阵的一种新算法 [J], 余承依;陈跃辉;赵立群
4.三对角对称正定阵及三对角对称M阵的逆特征值问题 [J], 廖安平
5.一种三对角矩阵的相似对角化及其应用 [J], 张兴刚;曹磊
因版权原因,仅展示原文概要,查看原文内容请购买。
求实对称三对角矩阵的特征值和特征向量

求实对称三对角矩阵的特征值和特征向量(一)摘要在特征值计算问题上,QR方法具有里程碑意义。
QR 方法是一种变换方法,是计算一般矩阵(中小型矩阵)全部特征值问题的最有效方法之一。
QR方法具有收敛快,算法稳定等特点.由于特征值和特征向量能从本质上揭露矩阵的某些重要性质,因而得到它们的精确解十分重要,但其计算一直是很繁琐的数学问题。
特别是当矩阵的阶数较高时,计算量非常大,且不易求其精确解。
关键词:特征值;特征向量;QR分解Solve Real Symmetry Three Diagonal Matrix Eigenvalue AndEigenvectorABSTRACTValues in the feature, the QR method has milepost sense. QR method is a transformation method, is the calculation of the general matrix ( small and medium-sized matrix ) one of the most effective methods of eigenvalue problems. The QR method has fast convergence, algorithm stability. Because the eigenvalues and eigenvectors can reveal some important properties of matrix from the nature, and thus obtain their exact solutions is very important, but the calculation is very complicated mathematical problems. Especially when the high rank of matrix, the calculation is very large, and is not easy to find the exact solution.Key words:eigenvalue; eigenvector; QR decomposition目录1 绪论 (1)1.1 问题重述 (1)1.2研究方法 (1)2 QR方法 (3)2.1 QR分解的概念 (3)2.2 Givens方法 (3)2.3豪斯霍尔德方法(镜像变换) (5)2.2.1 Householder 矩阵和Householder变换 (5)2.2.2QR算法 (6)3 QR算法C实现过程 (8)3.1主要参数 (8)3.2组成模块 (8)3.3程序改错 (8)4 测试运行 (11)参考文献……………………………………………………………………………….…….. 附录…………………………………………………………………………….……………..1 绪论1.1 问题重述(1)用你所熟悉的计算机语言编制利用QR 方法求实对称三对角矩阵全部特征值和特征向量的通用子程序。
数学与应用数学专业论文三对角矩阵的逆的算法及matlab实现

2014届学士学位毕业论文三对角矩阵的逆的算法及MATLAB实现学号:12204431姓名:任荣珍班级:12级专升本班指导教师:崔艳星专业:数学与应用数学系别:数学系完成时间:年月学生诚信承诺书本人郑重声明:所呈交的论文《》是我个人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写的研究成果,也不包含为获得长治学院数学系或其他教育机构的学位或证书所使用过的材料。
所有合作者对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
签名:日期:论文使用授权说明本人完全了解长治学院数学系有关保留、使用学位论文的规定,即:学校有权保留送交论文的复印件,允许论文被查阅和借阅;学校可以公布论文的全部或部分内容,可以采用影印、缩印或其他复制手段保存论文。
签名:日期:指导教师声明书本人声明:该学位论文是本人指导学生完成的研究成果,已经审阅过论文的全部内容,并能够保证题目、关键词、摘要部分中英文内容的一致性和准确性。
学位论文指导教师签名:时间摘要三对角矩阵在现实生活中有很多的应用,因此三对角矩阵的计算近年来被广泛地研究。
分块周期三对角矩阵在科学和工程计算方面应用广泛,块三对角矩阵和分块带状矩阵在数学、物理和工程上的很多问题中都有重要的应用。
本文基于三对角矩阵的结构特点,给出了利用解线性方程组的方法、LU 分解的方法求三对角矩阵逆矩阵的新算法,这些新算法运算量小,节省内存,在整个计算过程中,只需要进行较少次的乘除运算,新算法比传统算法的计算复杂度和计算时间要低。
其次,通过算例来表示该算法的有效性和可行性。
最后,利用MATLAB编程来实现三对角矩阵逆矩阵的新算法。
关键词:分块周期三对角矩阵;块三对角矩阵;分块带状三对角矩阵;解线性方程组;LU分解法;逆矩阵;MATLABTriple diagonal matrix inverse algorithm andMATLABAbstractTriple diagonal matrix in real life there are many applications, so the triple diagonal matrix calculation was widely studied in recent years. Block periodic triple diagonal matrix is applied widely in science and engineering calculation, and the block triple diagonal matrix block banded matrices in mathematics, physics and engineering has important applications in many of the problems, in this paper, based on the structure characteristics of triple diagonal matrices, is given by using the method of solving linear equations, the recursive method, LU decomposition of the new method to calculate the inverse matrix of triple diagonal matrix algorithm, the new algorithm computational complexity is small, save memory, in the whole computing process, only needs less arithmetic, a new algorithm than the traditional algorithm of computing complexity and computing time.Second by an example to show the feasibility and effectiveness of the algorithm Finally, using MATLAB to realize the triple diagonal matrix inverse matrix of the new algorithmKey words:Block periodic triple diagonal matrix; Block-triple diagonal matrix; Block banded triple diagonal matrix; Solution of linear equations; LU decomposition method; inverse matrix; MATLAB.目录1.引言 (1)2.基础知识 (2)2.1 定义1[1] (2)2.2 定义2[2] (2)2.3 定义3[3] (2)3.分块周期三对角矩阵逆的新算法 (3)3.1 分块三对角矩阵的一些性质 (3)3.2 求分块周期三对角矩阵逆矩阵的新算法 (5)4.块三对角矩阵的逆的算法 (7)4.1 块三对角矩阵的一些性质 (7)4.2 块三对角矩阵的逆 (8)4.2.1 块三对角矩阵逆的性质 (8)5.三对角矩阵逆元素的表示 (10)5.1 一般三对角矩阵 (10)5.2 用解线性方程组的方法求三对角矩阵的逆的算法 (11)5.2.1[5]基本原理与算法 (11)5.2.2[5]三对角矩阵A的逆矩阵的算法 (13)6.三对角矩阵逆的算法的MATLAB实现 (14)7.结束语 (14)8.参考文献 (14)附录 (14)致谢 (14)1.引言1.1 课题来源及选题意义三对角矩阵是计算数学的重要组成部分。
三对角矩阵公式推导
三对角矩阵公式推导我们先定义一个三对角矩阵,记作A:\[A = \begin{bmatrix}a_1 & b_1 & 0 & 0 & \dots & 0 \\c_1 & a_2 & b_2 & 0 & \dots & 0 \\0 & c_2 & a_3 & b_3 & \dots & 0 \\\vdots & \vdots & \vdots & \ddots & \ddots & \vdots \\0 & \dots & 0 & c_{n-2} & a_{n-1} & b_{n-1} \\0 & \dots & 0 & 0 & c_{n-1} & a_n \\\end{bmatrix}\]我们想要找到一个矩阵B,使得A可以通过B的逆和B相乘得到。
如果我们能够找到相应的B,那么我们就可以得到A的逆矩阵。
通过观察,我们可以发现这个三对角矩阵有一些特点。
首先,对角线上的元素是$a_1, a_2, a_3, \dots, a_n$,即A的主对角线元素。
其次,A的上方对角线元素是$b_1, b_2, b_3, \dots,b_{n-1}$,下方对角线元素是$c_1, c_2, c_3, \dots, c_{n-1}$。
其他位置的元素都是零。
我们再来观察相应的矩阵B。
B的对角线上的元素是$b_1, b_2, b_3, \dots, b_{n-1}$,B的上方对角线元素是$c_1, c_2, c_3,\dots, c_{n-1}$,下方对角线元素是$c_1, c_2, c_3, \dots, c_{n-1}$。
其他位置的元素都是零。
根据矩阵乘法的定义,我们可以将矩阵B的逆矩阵写成如下形式:\[B^{-1} = \begin{bmatrix}d_1 & e_1 & 0 & 0 & \dots & 0 \\f_1 & d_2 & e_2 & 0 & \dots & 0 \\0 & f_2 & d_3 & e_3 & \dots & 0 \\\vdots & \vdots & \vdots & \ddots & \ddots & \vdots \\0 & \dots & 0 & f_{n-2} & d_{n-1} & e_{n-1} \\0 & \dots & 0 & 0 & f_{n-1} & d_n \\\end{bmatrix}\]要得到A的逆矩阵,我们需要通过B的逆和B相乘。
数值分析实验报告之追赶法求三对角矩阵

xi yi ui xi1 , i n 1, ,1 ,显示求解结果,过程结束。
实 验 总 结
本次试验也是针对求解线性方程组解的问题。当一个矩阵的结构比较特殊时,利用 特殊的方法进行对待,这样可以提高解题的速度,本次实验所针对的一类矩阵是比较特 殊的, 因此用了追赶法进行求解。 因为对实验的核心算法有所了解, 在编程实现的时候, 基本上没有遇到算法的逻辑错误。在网上找到了几组实验数据,我分别对它们进行了测 试,在确定结果无误之后,然后求解老师实验所给数据。本次实验使我对线性方程组的 求解有了进一步的认识,增加了一种方程组的求解方法,对更加深入的学习线性方程组 有很大的帮助。
u1 ci y yi 1 c1 y , y1 1 , ui , yi i , i 2, , n 1, b1 b1 bi ui 1ai bi ui 1ai
yn
yn yn1an ,然后求解 xi yi ui xi 1 , i n 1, ,1 。 bn un1an
实验原理
b1 c1 x1 y1 x1 u1 x2 y1 x u x y a2 b2 c2 x2 y 2 2 2 3 2 化为 x an1 bn1 cn 1 xn1 y n 1 u n 1 xn y n 1 n 1 an bn xn y n xn y n
实验步骤
Step5:
方程组,过程结束,否则转到 Step5:; 2i;
Step6: 计算; ui ci / bi ui1ai , yi ( yi yi1 ) / bi ui1ai Step7: 判断 i 是否大于 n ,若是,转到 Step8,否则,令 r 1 r ,返回 Step6。 Step8:
数学-简单三对角矩阵矩阵行列式的基本探究
简单三对角矩阵矩阵行列式的基本探究张云鹏 ()指导教师:李厚彪【摘要】三对角矩阵的行列式的计算在行列式的计算中占据特殊地位,由于三对角矩阵具有明显的规律性但其行列式运算又有一定的难度经常成为出题的热点,本篇小论文给简单三角矩阵行列式运算做出基本解法,并通过三对角矩阵得到一组Cos 〔nx 〕与Sin(nx)的简明展开公式。
【关键词】三对角矩阵; 矩阵; 数列递推; 三角函数; 斐波那契数列1. 引言在进行行列式计算之前我们先探究一下斐波那契数列通项公式的计算方法。
例1、现已知斐波那契数列满足如下关系:()01111,1,,1n n n F F F F F n +-===+≥,试求其通项公式。
解:易知对于1、2项为任意值但满足()11,1n n n F F F n +-=+≥的数列的加法与数乘满足线性空间八条条件。
则存在满足()11,1n n n F F F n +-=+≥的两个数列{}n a 、{}n b 。
他们的任意;(k 0)nn a kb =≠不恒成立。
则任意{}n c 中的任意一项12n n n c k a k b =+使恒成立。
鉴于()11,1n n n F F F n +-=+≥的递推形式,我们不妨设数列{}n a 、{}n b 为两组几何级数,其公比分别为1q 、2q ;且()1nn a q =、()2nn b q =根据()11,1n n n F F F n +-=+≥可列方程n n-1n-2q =q +q ,化简可知2q -q-1=0。
又因为011,1F F ==,可求得12k k == 经计算可知15q=2±,则nnn n 1+51-5a =b =22⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭,。
又因为011,1F F ==,可求得12k k ==则斐波那契数列的表示为1122n n n F ⎡⎤⎛⎛⎥=- ⎥⎝⎭⎝⎭⎦我们简化上述求法为特征方程法。
并可以广泛运用在三对角矩阵矩阵行列式的计算中。
【三对角矩阵及其应用】(定稿)-20081314025-吴莉
[9] MEURANTG . A review on the inverse of symmetric tridiagonal and block tridiagonal matrices [J].SIAM J Matrix AnalApp l.1992.13(3):707-728.
[5] 张胜良.三对角矩阵的特征值及其应用.数学的实践与认识.2010.40(3):156-157.
[6] 张克诚,郭天民.三对角矩阵--牛顿-拉夫森联合法——一种改进的精馏算法.华东石油学院学报.1982(2):81-84.
[7] IKEBE Y.On inverse of Hessenbergmatrices[J].Linear Alge App l.1979.24:93-97.
根据塔顶产品流率、回流比及出料状态可以确定 。
关于三对角矩阵法的具体计算步骤,郭天民等已在文献[6]中详加讨论,本文从略。
三对角矩阵精馏算法有许多优点,它的算法比较简单,一般对初值要求不高,占用较少的内存单元数,因此实际精馏中经常用到它。
参考文献
[1] 冉瑞生,黄廷祝.三对角矩阵的逆.哈尔滨工业大学学报.2006.38(5):816-817.
2.2 主要结论......................................6
2.3 数值例子......................................8
3 三对角矩阵的特征值及特征向量..........................9
三对角矩阵行列式计算

三对角矩阵行列式计算三对角矩阵是一种特殊的矩阵,它的非零元素仅出现在主对角线和其相邻的两条对角线上。
在数学和工程领域中,三对角矩阵的行列式计算是一个重要的问题。
本文将介绍三对角矩阵的定义、性质以及行列式计算的方法,并通过实例进行说明,希望能够对读者有所帮助。
首先,我们来了解三对角矩阵的定义。
一个n阶三对角矩阵可以表示为下面的形式:\[\begin{bmatrix}a_1 & c_1 & 0 & \cdots & \cdots & \cdots & 0 \\b_1 & a_2 & c_2 & 0 & \cdots & \cdots & 0 \\0 & b_2 & a_3 & c_3 & \cdots & \cdots & 0 \\\vdots & \vdots & \vdots & \ddots & \ddots & \ddots &\vdots \\0 & 0 & 0 & \ddots & \ddots & \ddots & c_{n-1} \\0 & 0 & 0 & \cdots & b_{n-1} & a_n & c_n \\0 & 0 & 0 & \cdots & \cdots & b_n & a_{n+1}\\\end{bmatrix}\]其中,主对角线上的元素依次为$a_1, a_2, a_3, \cdots, a_n$,第一条对角线上的元素依次为$b_1, b_2, b_3, \cdots, b_{n-1}$,第二条对角线上的元素依次为$c_1, c_2, c_3, \cdots, c_n$。
数学毕业论文有关三对角矩阵的数值分析
有关三对角矩阵的数值分析摘要3对角矩阵是1类很重要的特殊矩阵,在数学和物理学中有广泛的应用.文章将根据3对角矩阵的特征,用待定系数法求解3对角线性方程组的数值解,并与常用的LU分解法从理论分析和数据实验两方面进行比较,结果表明,两者的时间复杂性前者稍差,而精度两者则相当,最后写出两者的C程序并运行结果.接下来用1种简单和容易实现的方法求出3对角矩阵的行列式,再利用其逆矩阵可以分解成两个很特殊的矩阵的乘积,给出1种算法实现3对角矩阵的逆的简便计算。
关键字:3对角矩阵;待定系数法;数值解;行列式;逆AbstractThe tridiagonal matrix is a kind of matrixthat with important special,it has widespread applications in mathematics and physics.In thispaper,based on the characteristic of the tridiagonal matrix,the method of hypothetical coefficient is used for the numerical solution of tridiagonal system of linear equations,this method will be compared with the LU resolving method through theory analysis and data experiment,compared the two methods,we will find the latter is better than the former in time complexity slightly ,but the precision is matched with eachother,finally write the C procedures for the two methods and get results. The next part,an easy algorithm will be used to compute the determinant of the tridiagonal matrix.the inverse can be divided into two so specialmatrices that we can compute out the explicit inverse via an algorithm.Keywords:tridiagonal matrix;numerical solution;determinant;inverse目录前言........................................................................................................................11 两类求解3对角方程组的数值方法 (2)1.1 问题引入...................................................................................................2 1.2 待定系数法求解3对角方程组........................................................................21.3 LU分解法求解3对角方程组 (7)1. 4 算法性能分析…………………………………………………………………………………9 2 关于3对角矩阵的行列式……………………………………………………………………………12 2.1 问题引入………………………………………………………………………………………12 2.2 方法提出………………………………………………………………………………………12 2.3 算法性能分析…………………………………………………………………………………133 3对角矩阵逆的数值解法……………………………………………………………………………153.1 问题引入………………………………………………………………………..................15 3.2 算法推导及实现.......................................................................................15 3.3 程序与数值例子..........................................................................................17结论.....................................................................................................................20参考文献...............................................................................................................20致谢 (21)摘要3对角矩阵是1类很重要的特殊矩阵,在数学和物理学中有广泛的应用.文章将根据3对角矩阵的特征,用待定系数法求解3对角线性方程组的数值解,并与常用的LU分解法从理论分析和数据实验两方面进行比较,结果表明,两者的时间复杂性前者稍差,而精度两者则相当,最后写出两者的C程序并运行结果.接下来用1种简单和容易实现的方法求出3对角矩阵的行列式,再利用其逆矩阵可以分解成两个很特殊的矩阵的乘积,给出1种算法实现3对角矩阵的逆的简便计算。
三对角行列式计算公式推导

三对角行列式计算公式推导三对角矩阵指的是只有主对角线和相邻的次对角线和超过它们一格的次对角线上有非零元素的方阵。
计算这种矩阵的行列式有一个特别简单的公式,即Cramer公式的变形:$$|A|=\prod_{i=1}^n a_i,$$其中$a_1, a_n$ 为矩阵 $A$ 的主对角线元素,$a_i, a_{i-1}$ 和 $a_{i+1}$ 分别为它的第 $i$ 个、第 $i-1$ 个、第$i+1$ 个次对角线上的元素。
我们可以采用数学归纳法来证明这个公式。
如果 $n=1$,那么$|A|=a_1$,这满足公式。
如果 $n=2$,那么 $|A|$ 的表达式可以用主对角线元素和第 $1$ 个次对角线元素表示,即:$$|A|=\left|\begin{matrix}a_1 & a_2 \\a_3 &a_4\end{matrix}\right|=a_1a_4-a_2a_3.$$根据公式可知,$|A|=a_1a_4-a_2a_3$,这满足公式。
假设$n=k$ 时公式成立,考虑 $n=k+1$ 的情况,即:$$|A|=\left|\begin{matrix}a_1 & a_2 & & & \\a_3 & a_4 & \ddots & & \\& \ddots & \ddots & \ddots & \\& & \ddots & a_{n-1} & a_n \\& & & a_{n+1} & a_{n+2}\end{matrix}\right|.$$将矩阵 $A$ 按行 $n$ 进行展开,可得:$$|A|=a_{n+1}\left|\begin{matrix}a_1 & a_2 & & & \\a_3 & a_4 & \ddots & & \\& \ddots & \ddots & \ddots & \\& & \ddots & a_{n-1} & a_n \\a_1/a_{n+1} & a_2/a_{n+1} & \cdots & a_{n-1}/a_{n+1} & 1 \end{matrix}\right|-a_n\left|\begin{matrix}a_1 & a_2 & & & \\a_3 & a_4 & \ddots & & \\& \ddots & \ddots & \ddots & \\& & \ddots & a_{n-1} & a_{n+1} \\a_1/a_n & a_2/a_n & \cdots & 1 & a_{n+1}/a_n\end{matrix}\right|.$$根据归纳假设,我们有:$$|A|=a_{n+1}\prod_{i=1}^{n} a_i-a_n\prod_{i=1}^{n-1} a_i,$$可见这满足公式。
求实对称三对角矩阵的特征值和特征向量.(DOC)

求实对称三对角矩阵的特征值和特征向量(一)摘要在特征值计算问题上,QR方法具有里程碑意义。
QR 方法是一种变换方法,是计算一般矩阵(中小型矩阵)全部特征值问题的最有效方法之一。
QR方法具有收敛快,算法稳定等特点.由于特征值和特征向量能从本质上揭露矩阵的某些重要性质,因而得到它们的精确解十分重要,但其计算一直是很繁琐的数学问题。
特别是当矩阵的阶数较高时,计算量非常大,且不易求其精确解。
关键词:特征值;特征向量;QR分解Solve Real Symmetry Three Diagonal Matrix Eigenvalue AndEigenvectorABSTRACTValues in the feature, the QR method has milepost sense. QR method is a transformation method, is the calculation of the general matrix ( small and medium-sized matrix ) one of the most effective methods of eigenvalue problems. The QR method has fast convergence, algorithm stability. Because the eigenvalues and eigenvectors can reveal some important properties of matrix from the nature, and thus obtain their exact solutions is very important, but the calculation is very complicated mathematical problems. Especially when the high rank of matrix, the calculation is very large, and is not easy to find the exact solution.Key words:eigenvalue; eigenvector; QR decomposition目录1 绪论 (1)1.1 问题重述 (1)1.2研究方法 (1)2 QR方法 (3)2.1 QR分解的概念 (3)2.2 Givens方法 (3)2.3豪斯霍尔德方法(镜像变换) (5)2.2.1 Householder 矩阵和Householder变换 (5)2.2.2QR算法 (6)3 QR算法C实现过程 (8)3.1主要参数 (8)3.2组成模块 (8)3.3程序改错 (8)4 测试运行 (11)参考文献……………………………………………………………………………….…….. 附录…………………………………………………………………………….……………..1 绪论1.1 问题重述(1)用你所熟悉的计算机语言编制利用QR 方法求实对称三对角矩阵全部特征值和特征向量的通用子程序。
三对角矩阵计算
三对角矩阵计算1997年6胃一社E擘高等学校计算数学奢芊盱第z期,聊\/P,三对角矩阵计算唐达(上海电机每科学校数学系,上海200240)TRIDIAGONALMA TRIXCALCULUSTangDa(ShanghaiElec~iealMachineryCollege)AbstractInthispaper,weeoas/derthefollow~.ngeompudngmethodoftridiag onalmatrix:(1)decouplingoflinearequation;(2)determinationofdeterminantandeigenvalue—eigenvectorrelation(3)matrixinversion. Thealgorithminthispaperpossessesatleastofleoftheadvantagessuchasfew- eroperating,lessmemorycapacity,higherprecisionorprogrammingsimplifieomparwiththecurrentmethods.KeywordsTrldiagonalmatrix,~‟-vector,Z-~Ctordecoupling,inversematri x?AMS(1g91)Subjectelasslflcatlons15A57.中圈法分类号O151.21引言在效值计算中,有许多问题最后归结为三对角矩阵的计算,因此研究它们的计算方法是有意义的.此外,有些三对角阵的计算方法可以做为带状阵计算的借鉴.本文讨论三对角线性方程组的解耦算法.矩阵的LR-分解,求行列式,Jacobi矩阵的特征值与特征向量的关系以及三对角阵求逆等方面的问题.与现有的算法比较,本文的算法具有计算量或存贮量较少,或计算精度较高,或编程较简单等某些特点.设A为阶非奇实三对角阵:收藕日期:1995一O5—25.吖七,f,)-/,,r¨,,,,●J●一,f唐选;三对角矩阵计算第2期£=(,,…,).当c≠0(1,2|..?,n一1)时,向量t按下述递推关系算得ft.一口0=1或不为零之实数),t2=一bitl/cI,(2)【t=一(乌一l一l+61£‟一I)16-1(1=3,4...-,n).这样的向量称之为对应的)f向量.令At一2.(3)式中==(,≈,…,),称为对应的)z向量.由(2)式知,除≠0外,z向量的其余分量均为零.我们称z向量中不为零的分量为尾分量.上面定义的£向量是右乘A.同样,如果≠0(1=2,3?,n),也可以定义左乘A的屯?A=.(4)式中屯(£El,,…,)t2E(zh,‟...,)均是行向量.向量中只有尾分量£≠0.求屯向量的递推关系与(2)式相仿,此不多述.为了与屯向量对应,有时也将(3)式中的t向量记为.如果令()向量中第f(1≤f<)十分量以后的分量全为零,这种向量记为().此时相应的2()向量中只有二十相邻的分量(即尾分量)墨,而+l≠0,(‰.,.≠0)?由(2)式知,所对应的f向量,z向量除可相差一比饲常数外,是唯一确定的.隶t向量的计算量(抬乘除法的计算次数,下同)为3一.对某些对角占优的三对角阵t文[1]指出,t向量的分量按指数规律增大.更一般地讲.如果的元索为区间(--5,5)中均匀分布的随机数,数值试验表明.t向量的分量平均也按指数规律增大?当试验次数充分多时,t中后一十分量比相邻前一十分量平均增大刭1.57倍左右(绝对值)?这是由大量数据四则运算的统计规律决定的.因此在计算t向量时要防止机器溢出.t向量是一个有用的工具,它可以使算式和演绎大为简化.下面利用它来进行一些矩阵计算.\,,.,●一1lA量向维n为1997年6月高等学校计算数学2三对角线性方程组的解耦,系数阵的LR-1分解文[2]指出,对大型三对角方程组采用解耦算法可避免产生太的误差.故这里也给出一种解耦算法.设血=(5)式中为维未知向量,f为方程组的右端常数项向量,A非奇且次对角线上无零元?令矩阵R(厶)为n阶单位阵将第i列(行)换为f()后所得的阵.即尼=,厶=11ttz:…第行(6)令=厶AR-A与R相乘的结果,除第f列外,其余各元素均与A相同I 在第f列上,第i一1个分量变成了零,第f及f+1个分量变成了尾分量.同样,然后厶左秉的结果,使矩阵A在f行上第f一1个分量变为零.故=L4R=01c1第f行…第列(7)可见除第i行第i列外,其余元素均与A相同.这样便把A变换成具有z4”~t角块的三对角阵.为了使(7)式中新生成的6r,及与中的其它元素大小接近,可按比倒调整f向量使(6)式的及接近1-夸一;』,1-...编,,,.,“,_4;O,100唐达.三对角矩阵计算第2期P—LJ,则方程(5)可写成,=,.因此便把方程(5)解耦成二个独立的方程来求解.若A为对称阵,显然有£=().故R=,所以变换后的矩阵A亦为对称阵. 以上是将(5)变换成二个独立的方程.同样,若要将方程(5)变换戚,,-+1个独立的方程,则可令AL1…L一.L_AR_一,…R.?(8)式中l<i<<…<‟一<‟≤.而().文[2]中给出的三对角方程组的解耦算法,需要附带解一个降了阶的,带宽为5的稀疏带状方程组.在(8)式中令=(一2,3…,n一1.n),则就变成对角阵D.这样便得到了A 的£I1DRI1分解.在(10)的右端如果不乘厶并令AR=L,可知L是二对角的下三角阵.这样便得到A的LR分解;A一(AR)R-;LR~.(11)3求行列式,Jacobi矩阵的特征位与特征向量的关聂求detA时,不妨设c≠0(l,2‟.-?,n--1),否则可按~plac,定理展开成子行,日式来忤算.此时应先求出对应的t向量.令Q为单位阵将第一列换为t后的矩阵.印夸Q;l1●:B—AQ.(12)]●●●●1997年6月高等学校计算数学10l则B除第一列外,其余元素均与A相同.在B的第一列上,只有第个元素不为零,是尾分量.对(12)式两端求行列式.detB=detA?detQ.将detB按第一列展开,并注意到detQ=1,就得A之行列式的计算公式detA=(一1)+l?.Tic,.(13)1列递推关系求得:.;口0≠O),{,.一l=一b./a.?,.,(16)『I皇一(6.+l?t件l+a+l?tf1),dI+1(1≤i≤一2)与前述一样,令At=zJ,则2,向量中只有尾分量(第一个分量)≠O.在向量中如令第f(2≤:n)个分量以前的分时均为零.这种向量记为,,其对应的尾分量为.-.. 向量l”…及t”.所对应的尾分量分别为,及,令一..._.,作向量1O2唐选;三对角矩阵计算第2期则向量”…只有第i个分量不为零,它为面是距主对角线衰减的.如果A不是强主元矩阵,饲如A的元素为区间(一.5,5)中均匀分布的随机数,则如前所述,此时I肛l 的平均值约为1.57,即逆阵的元素距主对角线的衰减率平均为1.57.因此一般来讲,求A-1时,只要计算主对角线附近的元素,离对角线较远的元素之值将趋于零.当很大时,这就节省了很多运算量及存贮量.由(21)式可见,A_1的结构是很简单的.(因而也就是t及,)的性态,决定了A-1的性态?A_1的第行(列)及第f+1行(列)的元素,除an,嘶-f+l,nm口ff+】四个紧靠主对角线的元素外,其余元素均两两成固定比倒.这说明如果任意给出A的3n-2个元素,则A的个元素不能任意给出,它们间必须遵循上述的比倒规律.由(21)式计算A的个元时,求i;.及的四则运算量为o(n),它们相除(乘)的运算量为..故求一的全部元素,其乘除法运算量为+o(n),加减法运算量仅为0().文[4],[5]及其列出的参考文献中也曾讨论过三对角阵的逆阵的算法.文[4]算法的运算量为2n.+.(一).文[5]的算法,对于非对称阵,先按该文定理2求出逆阵的下三角部分元素,如果安排得好,其运算量为+o(n).然后按引理5并化俺后隶出逆阵的上三角部分元素,其运O一…一“,●●●●,●【一∞一}lgg?年6月高等学校计算教学103算量亦为+.(n).故总的运算量为2n+.(n).无论是文[4]或文[5],均未给出A-I的结构5误差分析,数值实验前面述及的种种算法,均建立在l向量的基础上.因此,这里主要讨论计算£向量的浮点误差分析.由(z)式可得f一f查一?tl-z+一?一的位散即可.如果位致明显减少,则说明产生了数字的对消.如果在计算时t向时有一个分量产生严重对消,不一定使尾分量不精确I如果向量有相邻二个分量不精确,则一定导致尾分量的不精确.当发生这种情况时,可以类似于解方程组的迭代改善方法…来使有效位增加.本文提出的方程组解耦,求行列式及求逆矩阵等的算法,只是在l向量算出后再增加一些四则运算.可以证明它们都是向后稳定的算法.同理,文[5]求逆阵的算法也是向后稳定的.l04唐达:三对角矩阵计算第说明相对误差是小的..参考文献l萨乌里耶夫(袁兆鼎译),抛物型方程的冈格积分法,北京科学出版社.1963,l72一l73.2宋晓秋,袁兆鼎,刘穗贵,求解线性三对角方程组的解耦分解方法,系统工程与电子技术,12(199O),No.5,29—34.3蒋尔雄,对称矩阵计算,上海:上海科学技术出版社,1984,52—55.4陈增荣,任意三对角阵求逆,数值计算与计算机应用,8(1987),No.3,158--164.5Usmain,R.A.,Inverslon0fJaeobi‟sTKdiagomlmatrix,Comput.Math.App 1.,27(1994).No.8.59—66.6曹志浩等,矩阵计算和方程求根,第二版.北京;高等教育出版社,1987,30—46.。
三对角矩阵的快速算法

三对角矩阵的快速算法三对角矩阵是一种特殊的矩阵,其非零元素只在主对角线和其相邻的两条对角线上。
由于其特殊性,我们可以采用一些特殊的算法来加速其求解。
下面就介绍三对角矩阵的快速算法。
1. Thomas算法Thomas算法是最常用的三对角矩阵求解算法。
该算法的基本思想是将原始矩阵转化为一个下三角矩阵和一个上三角矩阵的乘积形式,在此基础上使用迭代求解的方法。
具体实现过程如下:设三对角矩阵为A,向量b为待求解的线性方程组右端项,向量x为解向量,则原始的线性方程组可以表示为:Ax = b将A分解为下三角矩阵L和上三角矩阵U的乘积形式:则有:令y = Ux,可以得到:这是一个下三角矩阵和向量的乘积,可以使用前代法求解。
然后,再使用后代法求解Ux = y即可得到解向量x。
2. Sherman-Morrison算法设当前矩阵为A,其逆矩阵为A-1,将A作出如下形式的修正:A' = A + uvT其中u和v是向量,T表示向量的转置。
则有:A'-1 = A-1 - A-1uvTA-1 / (1 + vTA-1u)将上式表示为如下形式:显然,如果u和v分别为e1和en,即:u = [1, 0, …, 0]T这个式子就是Sherman-Morrison算法的核心推导。
然后,可以递归地使用这个式子进行修正即可。
3. Doolittle算法Doolittle算法是一种用于求解三对角矩阵的LU分解的算法,与一般的LU分解算法类似,其也将矩阵分解为下三角矩阵L和上三角矩阵U的乘积形式。
总结三对角矩阵是一种特殊的矩阵,其求解具有一些特殊性质,例如可以使用Thomas算法、Sherman-Morrison算法和Doolittle算法等算法进行快速求解。
由于其特殊性,这些算法都比一般的矩阵求解算法具有更高的效率,因此在实际应用中得到了广泛的应用。
分离工程--07 多级分离计算一三对角矩阵法
其中:
qj
Dj Bj
A jq j1 A jp j1
,
pj
Bj
Cj Ajpj1
j=N xNi=qN
其中:
qN
DN BN
A Nq N1 A N p N1
,
(7-18)
(7-19) (7-20)
18
Aij xi, j1 Bij xi, j Cij xi, j1 Dij
当 式 (7-10) 代 入 ME 方 程 , 用 汽 相 组 成 vji 代 替液相组成lji,消lji得到:
14
j 1
j
(V j (Fk Gk Sk ) V1)x j1,i [V j1 (Fk Gk Sk )
k 1
k 1
V1 S j (V j G j )K j,i ]x ji V j1K j1,i x j1,i
0
(7-5)
为了简化MESH方程组,将L表示成V的函数,以
减少未知量。为此,从冷凝器到第j级做物料恒算,
如图7-3所示。从冷凝器至第j级总进料量以FS表 示,总气相采出量以GS表示,总液相采出量以SS 表示。则总物料恒算得:
Lj Vj1 FS SS GS V1 S1
(7-6)
1
一顺次求解,矩阵法是将全部平衡级的关系式组 成联立方程组同时求解的方法,这种方法一次求 解的变量多,计算量大,手续复杂,用手算的办 法是很难办到的,然而,由于它可以具体描述每 一平衡级的不同情况,建立相应的关系式,可以 满足多种复杂塔计算的要求,对于复杂冗长的计 算,借助电子计算机大容量、快速运算的功能已 不成其为问题。因而,矩阵法特别是被称为托马 斯算法(Thomas algorithm)的三对角矩阵法近年来 得到广泛的研究于应用。
三对角矩阵(TridiagonalMatrices)的求法:ThomasAlgorithm。。。
三对⾓矩阵(TridiagonalMatrices)的求法:ThomasAlgorithm。
做三次样条曲线时,需要解三对⾓矩阵(Tridiagonal Matrices)。
常⽤解法为Thomas Algorithm,⼜叫The tridiagonal matrix algorithm (TDMA)。
它是⼀种基于⾼斯消元法的算法,分为两个阶段:向前消元forward elimination和回代backward substitution。
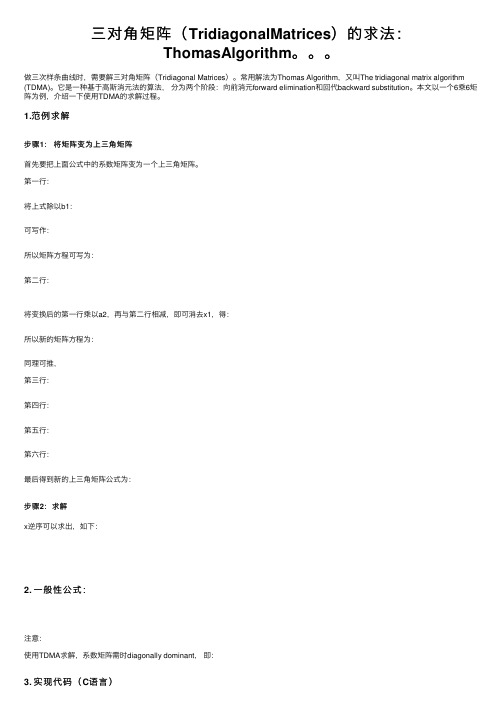
本⽂以⼀个6乘6矩阵为例,介绍⼀下使⽤TDMA的求解过程。
1.范例求解步骤1:将矩阵变为上三⾓矩阵⾸先要把上⾯公式中的系数矩阵变为⼀个上三⾓矩阵。
第⼀⾏:将上式除以b1:可写作:所以矩阵⽅程可写为:第⼆⾏:将变换后的第⼀⾏乘以a2,再与第⼆⾏相减,即可消去x1,得:所以新的矩阵⽅程为:同理可推,第三⾏:第四⾏:第五⾏:第六⾏:最后得到新的上三⾓矩阵公式为:步骤2:求解x逆序可以求出,如下:2. ⼀般性公式:注意:使⽤TDMA求解,系数矩阵需时diagonally dominant,即:3. 实现代码(C语⾔)void tdma(float x[], const size_t N, const float a[], const float b[], float c[]) {size_t n;c[0] = c[0] / b[0];x[0] = x[0] / b[0];for (n = 1; n < N; n++) {float m = 1.0f / (b[n] - a[n] * c[n - 1]);c[n] = c[n] * m;x[n] = (x[n] - a[n] * x[n - 1]) * m;}for (n = N - 1; n-- > 0; )x[n] = x[n] - c[n] * x[n + 1];}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
长沙学院信息与计算科学系本科生科研训练三对角矩阵的简单计算
系(部):信息与计算科学
专业:数学与应用数学
学号: 2009031105
学生姓名:尹锋霖
成绩:
2012 年6月
三对角矩阵的简单计算
尹锋霖
长沙学院 信息与计算科学系, 湖南 长沙, 410022
摘要:三对角行列式是一类特殊而常见的行列式,其计算灵活多样,本文给出三对角行列式的两种特殊的计算方法和证明.
关键词:三对角行列式,递推法,差分法
1 引言
1.简本文主要介绍三对角行列式两种简单计算方法,然后给与证明,对以后行列式的计算有很大的帮助.
2.文献[1],主要研究了三对角行列式的递推法、差分法、数学归纳法和拆行(列)法这四种计算方法.文献[2],主要研究了三对角行列式及其运用,主要讨论了利用递归方程得到了计算了计算三对角行列式的一般方法,然后研究三对角行列式在线性代数及组合数学中的应用.文献[3],主要是在给出了三对角行列式的几种算法,利用三对角行列式证明了两类Chebyshev 多项式的几种显式.
3,本篇文章主要总结了三对角行列式的两种简单计算与证明. 定义1 形如
111
222333111
000000000000
n n n n n
b a
c b a c b a D c b a c b ---=
的n 阶行列式叫做三对角行列式.
2 两种方法对三对角行列式的求解
2.1 递推法
递推法可分为直接递推和间接递推.用直接递推法计算行列式n D ,依次从
123n D D D D →→→→ 逐级递推便可以求出
n
D 的值;间接递推的做法是,借助于行
列式中元素的对称性,交换行列式构造出关于n D 和1n D -的方程组,从而消去1n D -就可解得n D .
例1 计算n阶行列式
000000000000
n a b c a b c a b D c a b c
a
=
.
因此有
()1
1
2
2
4;
1,
4;
2n n n n
a a a bc D a n a bc ++⎧
+--≠=⎪⎛⎫
⎪+= ⎪⎪⎝⎭
⎩
.
证明 设det n n D T =按第一行展开得
12n n n D aD bcD --=-. (1)
取p ,q
为方程20x ax bc -+=的根,即
2
a p +
=
,2
a q -=
,
则式(1)可改为
112()n n n n D pD q D pD ----=-.
注意到
2
21D pD q
-=,
可递推求得
1n
n n D pD q
--=,
从而
11
2
1
1
2
,4;(1),4;
n n n n n n
n n p q a bc D p p
q pq
q p q
n p a bc ++--⎧-≠⎪=++++=-⎨⎪+=⎩
,
从而得到
()1
1
2
2
4;
1,
4;
2n n n n
a a a bc D a n a bc ++⎧
+--⎪≠=⎪⎛⎫
⎪+= ⎪⎪⎝⎭
⎩
.
证毕.
例3 计算下面行列式
4104
410
4
4
A =.
2
4414=⨯⨯ , 3
4(31)322A ⎛⎫
∴=+⨯= ⎪⎝⎭
.
2.2 差分法
首先由行列式n D 得到一个一般的递推公式
12n n n D pD qD --=+.
然后把该关系看作一个差分方程,求出特征方程
2
0p q λλ-+=
的两个根12,λλ,则
112212()n
n
n D C C λλλλ=+≠,
或
1212()n
n D nC λλλ==.
最后从由12,D D 得到的一个方程组中解出常数12,C C ,从而求出行列式n D 的值. 例3 计算n 阶行列式
000000000000
n a b a b
a b a b a b a D b a b a b
a b
+++=
++
.
解 按第一列展开得
()
1100000000()0000
n n n a b a b
a b a b a b a D a b D b
b a b a b
a b
--+++=+-++
()12()3n n a b D abD n --=+=≥.
即有递推关系
12()(3)
n n n D a b D abD n --=+=≥.
令,p a b q ab =+=-.由特征方程20p q λλ-+=得到两个特征根12,a b λλ==. 若a b ≠,则112212n n n n n D C C C a C b λλ=+=+,由2212,D a b D a ab b =+=++, 有
122222
12
a b C a C b a ab b C a C b +=+⎧
⎨++=+⎩. 1
1
12,;n n n
a b a
b
C C D
a b
a b
a b
++-=
=
∴=---.
若a b =,则特征方程有相等实根12a λλ==,这时
112212n
n
n
n
n D C nC C a nC b
λλ=+=+,
代入12,D D 解方程组可得
121(1)n
n C C D n a
==⇒=+.
因此有
11
,(1),n n n n a b a b D a b
n a a b
++⎧-≠⎪
=-⎨⎪+=⎩
.
参考文献
[1] 卢潮辉.三对角行列式的计算[J ].漯阳职业技术学院学报,2010,9(2):1-4. [2] 杨胜良.三对角行列式及其应用[J ].工科数学,2002,18(2).
[3] 杨胜良.三对角行列式与Chebyshev 多项式[J ].大学数学报,2006,22(6)1-6:. [4] 徐仲,张凯院,陆全.矩阵类的快速算法[M ].西北:西北工业出版社,1999: [5] 王萼芳,石生明.高等代数[M ].北京:高等教育出版社,2003:。