基于ARM的空中机器人飞行控制系统的设计
《2024年基于STM32单片机的无人机飞行控制系统设计》范文

《基于STM32单片机的无人机飞行控制系统设计》篇一一、引言随着科技的发展,无人机在各个领域中的应用越来越广泛。
为了提高无人机的性能、安全性和可靠性,设计一套有效的飞行控制系统至关重要。
本文旨在介绍基于STM32单片机的无人机飞行控制系统的设计原理与实现过程。
二、系统设计概述本无人机飞行控制系统采用STM32系列单片机作为核心控制器,通过对无人机飞行状态的实时检测和控制,实现对无人机的精确控制。
系统包括传感器模块、电机驱动模块、通信模块等部分。
传感器模块用于获取无人机的飞行状态信息,电机驱动模块根据控制器的指令驱动无人机飞行,通信模块实现与地面站的双向通信。
三、硬件设计1. STM32单片机STM32系列单片机具有高性能、低功耗等优点,是本系统的核心控制器。
通过编程实现对无人机的控制,包括姿态控制、导航控制等。
2. 传感器模块传感器模块包括陀螺仪、加速度计、磁力计等,用于获取无人机的飞行状态信息。
这些传感器将数据传输给STM32单片机,为飞行控制提供依据。
3. 电机驱动模块电机驱动模块采用舵机控制方式,通过PWM信号控制电机的转速和方向,实现无人机的精确控制。
该模块采用H桥电路实现电机正反转,配合单片机输出的PWM信号,实现对电机的精确控制。
4. 通信模块通信模块采用无线通信方式,实现与地面站的双向通信。
通过无线数传模块将无人机的飞行状态信息传输给地面站,同时接收地面站的指令,实现对无人机的远程控制。
四、软件设计软件设计包括控制系统算法和程序编写两部分。
控制系统算法采用先进的姿态控制算法和导航算法,实现对无人机的精确控制。
程序编写采用C语言,实现对单片机的编程和控制。
在程序设计中,需要考虑到系统的实时性、稳定性和可靠性等因素。
五、系统实现系统实现包括硬件组装、程序烧录和调试等步骤。
首先将各模块组装在一起,然后通过编程器将程序烧录到STM32单片机中。
在调试过程中,需要对系统的各项性能进行测试和优化,确保系统的稳定性和可靠性。
毕业论文基于ARM的四旋翼自主飞行控制系统设计

2016 南阳理工学院本科生毕业设计论文学院系电子与电气工程学院专业电子信息工程学生指导教师完成日期南阳理工学院本科生毕业设计论文基于ARM的四旋翼自主飞行控制系统设计Autonomous control system for the quadrotor unmannedaerial vehicle based on ARM processors总计毕业设计论文25 页表格0 个插图20 幅3 南阳理工学院本科毕业设计论文基于ARM的四旋翼自主飞行控制系统设计Autonomous controlsystem for the quadrotor unmanned aerial vehicle based on ARM processors学院系电子与电气工程学院专业电子信息工程学生姓名学号指导教师职称评阅教师完成日期南阳理工学院Nanyang Institute of Technology4基于ARM的四旋翼自主飞行控制系统设计[摘要]针对改变传统以单片机为处理器的四旋翼自主控制飞行器控制方式的问题设计了一种基于嵌入式ARM的飞行控制系统的设计和实现方案。
这是一种基于ARM的低成本、高性能的嵌入式微小无人机飞行控制系统的整体方案。
详细介绍了控制系统的总体构成以及硬软件设计方案包括传感器模块、视屏采集模块、系统核心控制功能模块、无线通信模块、地面控制和数据处理模块。
实验结果表明该设计结合嵌入式实时操作系统保证了系统的高可靠性和高实时性能满足飞行器起飞、悬停、降落等飞行模态的控制要求。
[关键词]ARM四旋翼自主飞行器控制系统。
Autonomous control system for the quadrotor unmannedaerial vehicle based on ARM processors Abstract In order to change the conventional control of four—rotor unmanned aerial vehicles using microcontroller as the processor a solution of flightcontrol system based on embedded ARM was presented which is low-cost,small volume, low power consumption and high performance. The purpose ofthe work is for attending the National Aerial Robotics Competition. The mainfunction of the system the hardware structure and the software design werediscussed in detail including the sensor module the motor module the wirelesscommunication module With embedded real time operating system to ensurethe system’s high reliability and real-time performance the experiments resultsshow that the requirements of flight mode are satisfied including taking ofhovering and landing and so onKey words ARM four-rotor unmanned aerial vehicles control system5 of the control signals 1 四旋翼飞行器的简介 1.1题目综述微型飞行器MicroAir Vehicle/MAV的概念最早是在上世纪九十年代由美国国防部远景研究局DARPA提出的。
基于ARM的无人机飞行仿真系统的设计

摘
要 :无人机飞行仿真系统可以针对无人机的飞行状态进行有效的仿真分析 ,对于无人机的
操控和学习具有重要的意义。以 S M 2 13嵌入 式芯片为核心处理器,并采用模块化的设计思 T 3 F0 路 ,开发 出一种基 于 A M 的无人机 飞行仿 真 系统。详 细介 绍 了无 人机 飞行 仿真 系统 总体 设计 方 R 案 以及 系统 的硬 件设 计和软 件设计 原则和 流程 ,同时 ,较 为 详尽 地 阐述 了各模 块 的功 能和 作 用 ,
smu ain s s m. AI ,t e p i cp e n ea ld p o e s d sg f t e h r wae a d s f a e a e i lt y t o e s o h r il s a d d ti r c s e in o ad r n o t r r n e h w p o o e .Me n h l ,t e s s m d p s mo u a e i t o s rp sd a w i h yt a a t e e d lr d s me d .Be a s ft e welf n t n ft e n g h c u eo l u c o so h i h
2 1 年第2 02 期
文章编号 :0 9 2 5 (0 2 0 0 6 0 10 — 52 2 1 )2— 13— 3 中图分类号 :P 9 . T 3 19 文献标识码 : A
基 于 A M 的无 人机 飞行 仿真 系统 的设 计 R
刘 凯 ,路 平 ,甄云卉2 ,朱安石
(.军械 -程学院光学与 电子 -程系 ,石家庄 000 ; .河北省军 区通信站 , 1 v v 503 2 石家庄 000 ) 503
较 好地 完成 了系统 的设 计方 案 。
基于ARM微控制器无人机导航控制系统软件设计
关.【 l无人机 ;导航 ;^ - 词 RM;u O -I C/ S I
中圈 分类号: P9. T 31 文献标识码: 文章壕号:1 7 99 21 ) 309-2 8 A 0 -59(01 1- 130 0
ARM — s d M ir c n r l r Ba e c o o t o l e
cn o w a oi mi CO - T St ds nU V nvgt ncn o epr n hw ta cmp ac i efgt ot la l rh , u / SI R O ei A aiao ot lx emet so t o l ewt t i r l g t n I o g i r , i s h i n h h lh
摘 要:导航控制 系统是无人机实现 自主飞行的控制核 心,在采用 A . 微控制器,角速率陀螺 ,加速度计、G S RM P、 气 高 压 度传感器、差压传感器等硬件基础上 ,结合导 航控制律算法,在 u / S I嵌入式实时 C O -I 操作 系 统下设计 实 现无人机 导航控制 ,实验表明其符合飞控 系统的高精度、小型化、数字化发展趋势,具有研究价值和广泛的应用前景。
基于AVR单片机的空中机器人伺服系统

国家 , 人 机 在 军 事 和 民用 上 都 已经 有广 泛 的应 用 。空 中机 器 无 人 大 致 可 以分 为 几 个 种 类 , 括 固 定 翼 飞 机 机 器 人 、 翼 飞 机 包 旋 机 器 人 和 飞行 器 机 器 人 等 . 固定 翼 飞 机 机 器人 技 术 的发 展 已经 相 对 比较 成熟 .现 役 的 大 部 分 空 中机 器 人 大 多 是 属 于 此 类 。 但
旋 翼 飞 机 机 器 人 和 飞行 器 机 器 人 技 术 的发 展 相 对 就 比较 滞 后 . 真 正 应 用 到 实 际 的相 对 较 少 。 自从 1 9 9 0年 国 际无 人 系统 协 会
l 引 言
空 中 机 器 人 是 一 个 极 具 挑 战 性 的 多 学 科 交 叉 的前 沿 性 研
究课 题 , 几 年来 发展 非 常 迅 速 。 空 中机 器 人 可 以完 成 一 些 如 近
重 要 的一 环 。
空 中 机 器 人 主 要 是 由飞 行 器 载 体 、 行 控 制 计 算 机 、 性 飞 惯 站 5个 主 要 部 分 组 成 I 一 些 扩 展 功 能 模 块 可 以根 据 不 同 的 需 ” 。
基于ARM处理器的无人飞行器飞控导航系统一体化设计
基于ARM处理器的无人飞行器飞控导航系统一体化设计作者:陈亚锋来源:《现代电子技术》2015年第17期摘要:为实现无人飞行器飞控导航系统功耗低、体积小、低成本、高集成度等目标,提出一种基于ARM架构STM32F405微处理器和MEMS传感器芯片的无人飞行器飞控导航一体化控制系统设计方案。
详细介绍了控制系统的原理、组成以及软硬件设计过程,并引入非线性鲁棒控制算法以提高控制系统的精度及抗干扰能力。
仿真结果表明,采用非线性鲁棒控制算法的控制系统性能稳定,并且具有控制精度良好、鲁棒性较强等特点。
关键词:无人飞行器; ARM微处理器; MEMS传感器;非线性鲁棒控制中图分类号: TN967⁃34; V249 文献标识码: A 文章编号: 1004⁃373X(2015)17⁃0093⁃04Integration design of UAV flight control navigation system based on ARM microprocessorCHEN Yafeng(The 27th Research Institute of China Electronics Technology Group Corporation,Zhengzhou 450047, China)Abstract: To realize the targets of low power consumption, small size, low cost and high integration density of UAV flight control navigation system, the design scheme of integration control system for UAV flight control navigation based on ARM⁃STM32F405 microprocessor and MEMS sensor chip is proposed. The principle, constitution, and the design process of hardware and software of the control system are introduced in detail. The nonlinear robust control algorithm is introduced to improve the accuracy of the control system and the ability of resisting disturbance. The simulation results show that this control system is stable and has good control precision and strong robustness by using the nonlinear robust control algorithm.Keywords: UAV; ARM microprocessor; MEMS sensor; nonlinear robust control0 引言无人飞行器在军用和民用方面的需求日益增多,特别是小型无人飞行器,已经在侦察打击、航拍测绘、消防减灾、电力巡线、农林植保等诸多领域得以研究应用。
《2024年基于STM32单片机的无人机飞行控制系统设计》范文

《基于STM32单片机的无人机飞行控制系统设计》篇一一、引言随着科技的不断进步,无人机已成为众多领域的重要工具,其应用领域从军事侦察、地质勘测,到农业植保、物流配送等不断拓展。
为了确保无人机的稳定飞行和精确控制,一个高效且可靠的飞行控制系统显得尤为重要。
本文将详细介绍基于STM32单片机的无人机飞行控制系统设计,包括硬件设计、软件设计以及系统测试等方面。
二、硬件设计1. 主控制器选择本系统选用STM32系列单片机作为主控制器,其具有高性能、低功耗、丰富的外设接口等优点,适用于无人机飞行控制系统的需求。
2. 传感器模块传感器模块包括陀螺仪、加速度计、磁力计等,用于获取无人机的姿态、速度、位置等信息。
这些传感器通过I2C或SPI接口与主控制器连接,实现数据的实时传输。
3. 电机驱动模块电机驱动模块负责控制无人机的四个电机,实现无人机的起飞、降落、前进、后退、左转、右转等动作。
本系统采用H桥电路实现电机驱动,通过PWM信号控制电机的转速和方向。
4. 电源模块电源模块为整个系统提供稳定的电源供应。
考虑到无人机的体积和重量限制,本系统采用锂电池供电,并通过DC-DC转换器将电压稳定在合适的范围。
三、软件设计1. 操作系统与开发环境本系统采用嵌入式操作系统,如Nucleo-F4系列开发板搭配Keil uVision或HAL库进行软件开发。
这些工具具有强大的功能,可以满足无人机的复杂控制需求。
2. 飞行控制算法飞行控制算法是无人机飞行控制系统的核心。
本系统采用四元数法或欧拉角法进行姿态解算,通过PID控制算法实现无人机的稳定飞行。
同时,结合传感器数据融合算法,提高系统的鲁棒性和精度。
3. 通信模块通信模块负责无人机与地面站的通信,包括遥控信号的接收和飞行数据的发送。
本系统采用无线通信技术,如Wi-Fi或4G/5G模块,实现与地面站的实时数据传输。
四、系统测试为了确保无人机飞行控制系统的稳定性和可靠性,需要进行一系列的系统测试。
基于ARM的嵌入式移动机器人控制系统的设计
基于ARM的嵌入式移动机器人控制系统的设计嵌入式移动机器人控制系统是基于ARM架构设计的一种智能机器人控制系统,该系统具有灵活性高、性能稳定、功耗低等优点。
本文将从硬件设计和软件开发两个方面来详细介绍基于ARM的嵌入式移动机器人控制系统的设计。
硬件设计方面,嵌入式移动机器人控制系统的核心是基于ARM技术的处理器,可以选择低功耗、高性能的ARM Cortex-A9或Cortex-A53处理器。
处理器上可以集成多个内核,通过多核处理器的并行计算能力,可以提高机器人的实时性和响应速度。
此外,为了实现机器人的移动功能,还需要配备驱动电机的电机控制器和位置传感器,采用PWM控制技术来控制电机的转速和方向。
在软件开发方面,首先需要开发移动机器人的操作系统。
可以选择基于Linux的嵌入式操作系统,如Ubuntu的ARM版本或自主开发的实时操作系统。
操作系统可以负责机器人的任务管理和资源调度,提供良好的多任务处理能力。
其次,还需要设计适配机器人硬件的驱动程序,包括电机驱动、传感器驱动、通信驱动等。
驱动程序负责与硬件设备进行交互,将控制指令转化为相应的电信号或数据信号,并获取传感器的数据反馈。
最后,还需要进行机器人的应用开发,根据机器人的具体应用场景,开发相关的算法和控制逻辑,实现机器人的自主导航、路径规划、避障等功能。
在嵌入式移动机器人控制系统设计过程中,还需要考虑功耗管理、通信接口和外设模块等因素。
功耗管理是嵌入式系统设计中非常重要的一环,可以使用睡眠模式来降低功耗,还可以采用动态电压和频率调节的技术,根据系统负载的大小动态调整处理器的工作频率和电压。
通信接口方面,可以采用以太网、Wi-Fi、蓝牙等无线通信技术,实现机器人与外部设备的数据交换和控制指令的传输。
外设模块可以包括摄像头、激光雷达、超声波传感器等,通过外设模块可以实现机器人的感知和环境理解能力。
总之,基于ARM的嵌入式移动机器人控制系统的设计需要进行硬件设计和软件开发,并考虑功耗管理、通信接口和外设模块等因素。
基于ARM单片机四旋翼飞行器控制器设计
本科毕业论文(设计)基于ARM 单片机的四旋翼飞行器 控制器设计系 (部)专 业学 号学生姓名指导教师提交日期中工 信商概要近几年,微小型的四旋翼无人机已逐渐成为无人机领域的研究热点。
由于其灵活性,机体结构简单,维修方便等优点,并且可以在空中悬停,垂直起飞和着陆。
所以它在军事和民用领域巨大的应用潜力,在架构设计和飞行控制国内外许多研究机构的研究也致力于四个旋翼无人机飞行控制系统,以实现四个旋翼无人机自主飞行]10[。
四旋翼无人机飞行控制系统的重要组成部分是其机载的传感器系统,由于它为机载控制系统提供了可靠的飞行状态信息,因此是实现四旋翼无人机自主飞行的重要设备之一。
本论文设计了一种基于ARM处理器作为主控制器的四旋翼飞行器,由MTi.G惯性导航一体机,高精度声纳传感器和无线遥控器为主的机载传感器系统。
该系统已经完成了航班状态信息的采集和处理,与空气中的控制器,实现了四旋翼飞行器空中自主悬停控制。
使用现有的机载控制器硬件平台的ARM嵌入式控制器的功能是构建一个功能完善,和机载传感器系统(微型姿态航向参考系统和声纳传感器)的采集和处理测量的数据,对采集到的数据以及遥控数据进行一定的PID算法的计算]2[,进而控制四个无刷直流电机的转动,实现可四旋翼飞行器的稳定飞行。
关键字:四旋翼无人机声纳传感器无刷直流电机Four rotor aircraft design based on ARM single chipmicrocomputerABSTRACTIn recent years,quadrotor helicopter has become a hotspot of the research about unmanned aerial vehicle(UA V).It has high maneuverability,easy maintance,simple configuration, and the ability of agile hovering,vertical taking off and landing(VTOL).Because of their huge potential application values for civil and military utilization,researches on the architecture of flight control system(FCS)are conducted by many universities and companies to achieve autonomous flight control of quadrotors.Onboard sensor system is a very important component of flight control system because it will supply reliable flight informations of quadrotor for the flight controller.In this paper,a self assembled quadrotor helicopter is used as the airframe for the flight control system design.An attitude measuring method based on ARM processor is proposed, which gives out attitude informations of medium and low accuracy. The data acquisition and processing about the flight information of quadrotor is accomplished.The qutonomous hovering control of quadrotor cooperating with flight control system onboard is achieved.A complete platform of flight control system onboard is estibalished by there—development of ARM embedded controller to make it possible for the scource code to be run on the ARM embedded controller.Onboard data accquiration and processing are implemented.Then PID algorithm for computing some of the collected data, and then control four brushless DC motor rotation, achieve stable flight four rotary wing aircraft.Keywords:Quadrotor ARM AHRS Sonar Four brushless DC motor rotation目录1 绪论 (1)1.1 研究的前景与意义 (1)1.2 国内外的研究现状 (1)2 设计任务 (3)2.1 设计要求 (3)2.2 使用说明 (3)3 四轴飞行器样机结构与硬件选择 (4)3.1 样机结构与系统结构 (4)3.2 硬件设计与选型 (6)3.2.1 核心板 (6)3.2.2 陀螺仪 (6)3.2.2 超声波模块 (7)3.2.3 电源模块 (8)3.2.4 电机模块 (9)3.2.5 无线通信与显示 (10)4 程序设计与调试 (12)4.1 飞行器姿态导航的数据的采集 (13)4.2 声呐传感器数据的采集 (14)4.3 电机的控制 (15)4.5 调试 (16)结论 (18)参考文献 (19)致谢 (20)附录 (20)1 绪论1.1 研究的前景与意义四旋翼无人飞行器拥有很多优点和广阔的应用前景。
基于飞行器智能控制的航空器无人机系统设计与开发
基于飞行器智能控制的航空器无人机系统设计与开发近年来,无人机技术的发展迅猛,成为了许多领域的关键工具和应用。
在航空器无人机系统的设计与开发中,飞行器智能控制是一个至关重要的方面。
本文将探讨基于飞行器智能控制的航空器无人机系统的设计与开发的相关内容。
无人机系统的设计与开发首先需要考虑到飞行器的外形和结构。
根据不同的应用需求,无人机的外形可以是多轴、固定翼、垂直起降等。
在选择外形时,需要综合考虑任务类型、航程、载重能力等因素,确保无人机在执行任务时具备稳定的飞行性能。
其次,无人机系统的智能控制是实现飞行器高效自主控制的关键。
智能控制采用了现代先进的技术,如人工智能、图像处理和传感器融合等。
其中,人工智能技术可以用于无人机航迹规划、路径规划和障碍物避障等任务。
图像处理技术可以用于目标检测、跟踪和识别,可以帮助无人机自主完成任务。
传感器融合技术可以整合多种传感器的数据,提高无人机的感知能力和航行精度。
在智能控制方面,强化学习是一种非常有效的方法。
强化学习通过不断尝试和学习,使得无人机能够自主学习和优化控制策略,从而具备更好的飞行性能和任务执行能力。
此外,深度学习技术也可以用于无人机系统中的智能控制,通过大规模的数据训练神经网络模型,实现对复杂任务的自主控制。
无人机系统的开发涉及到硬件和软件的结合。
在硬件方面,需要选用高性能的处理器、传感器和通信设备,以确保无人机系统在执行任务时具备足够的计算能力和数据传输能力。
在软件方面,需要开发无人机系统的操作系统、飞行控制软件和任务执行软件等,以实现无人机的自主飞行和任务执行。
此外,对于航空器无人机系统的设计与开发,还需要考虑到安全性和可靠性的问题。
无人机系统中的智能控制需要确保系统的安全性,避免由于控制失误或故障导致事故发生。
因此,在系统设计时需要引入故障检测和容错机制,以提高系统的可靠性和稳定性。
同时,无人机系统还需要考虑到对飞行员和地面操作人员的支持,提供友好的用户界面和可视化显示,使其能够方便地控制和监控无人机的飞行和任务执行。
基于ARM的航空遥感相机控制系统设计与实现

・
6 0・
《 测控 技 术 ̄0 2年 第 3 21 1卷第 9期
基于 A M的航空遥感相机控制 系统设计与实现 R
王 熙 ,黄 鲁
20 2 ) 30 7 ( 中国科学技术 大学 电子科 学与技术系 , 安徽 合肥
摘 要 : 绍 了某 型 C D相机 图像 的 采 集存 储控 制 系统 , A M 介 C 以 R 9处理 器 ¥ C 4 0为核 心 , 合 系统 要 3 21 结
LT C F控制 器接 口改造 的方 法。使 用的 结果 显示 , 系统运行 可 靠。 本
关键 词 :3 2 1 ; ¥ C 4 0 可调 节液 晶滤光 片 ( C F ; C L T ) C D相 机 ;C 0 P 14 中 图分类 号 : P 7 文 献标识 码 : 文章 编号 :0 0— 8 9 2 1 ) 9— 0 0— 4 T21 A 10 8 2 ( 0 2 0 0 6 0
trteitr c ftel udcy tl u a l l rf C F c nrl rfrARM. h e ut fa piain s o e nef eo i i rs n beft s T 1 o t l h a h q at ie L oe o T ers l o p l t h w s c o
本 文介 绍 了一个 控 制 高 速 图像 采 集 存 储 的 系 统 ,
1 1 系统要 求 .
采集存 储 系统原 理简 图如 图 1所示 。将其 与相 机
一
起 置 于 飞 艇 上 , 收 P 14工 控 机 的 指令 , 谐 滤 接 C0 调
系 统将 完成 对 相 机 的 初 始 化 、 摄 设 置 、 摄 过 程 控 拍 拍 制 、 据采 集存储 , 数 以及拍 摄状 态 的信 息 回馈 。
基于MATLAB的无人机自主飞行控制系统设计与实现
基于MATLAB的无人机自主飞行控制系统设计与实现一、引言随着科技的不断发展,无人机技术在各个领域得到了广泛的应用,如农业、航拍、物流等。
而无人机的自主飞行控制系统是保证无人机飞行安全和稳定性的关键。
本文将介绍基于MATLAB的无人机自主飞行控制系统设计与实现。
二、无人机自主飞行控制系统概述无人机自主飞行控制系统是指通过预先设定的飞行路径和控制算法,使无人机能够在没有人为干预的情况下完成飞行任务。
该系统通常包括传感器、执行器、控制算法等组成部分。
三、MATLAB在无人机控制系统中的应用MATLAB作为一种强大的工程计算软件,在无人机控制系统中有着广泛的应用。
其强大的数学计算能力和丰富的工具箱使得设计和仿真无人机控制系统变得更加高效和便捷。
四、无人机自主飞行控制系统设计步骤1. 确定飞行任务需求在设计无人机自主飞行控制系统之前,首先需要明确飞行任务的需求,包括起飞、巡航、航点跟踪、着陆等。
2. 传感器选择与布局根据飞行任务需求选择合适的传感器,并合理布局在无人机上,常用传感器包括GPS、惯性测量单元(IMU)、气压计等。
3. 控制算法设计设计合适的控制算法是保证无人机稳定飞行的关键。
常用的控制算法包括PID控制器、模糊控制、神经网络控制等。
4. 系统建模与仿真利用MATLAB对无人机自主飞行控制系统进行建模和仿真,验证设计的控制算法在不同场景下的性能表现。
5. 硬件实现与调试将设计好的控制算法烧录到无人机飞控硬件中,并进行调试和优化,确保系统稳定性和可靠性。
五、基于MATLAB的无人机自主飞行控制系统实现案例以一架四旋翼无人机为例,通过MATLAB/Simulink搭建了其自主飞行控制系统。
通过PID控制器实现了姿态稳定控制和高度保持功能,在不同飞行任务下表现出良好的性能。
六、总结与展望本文介绍了基于MATLAB的无人机自主飞行控制系统设计与实现过程,强调了传感器选择与布局、控制算法设计、系统建模与仿真以及硬件实现与调试等关键步骤。
基于STM32单片机的无人机飞行控制系统设计

基于STM32单片机的无人机飞行控制系统设计基于STM32单片机的无人机飞行控制系统设计一、引言无人机作为一种高效、灵活的飞行器,已经广泛应用于农业、航空摄影、物流等领域。
无人机的飞行控制系统是实现无人机稳定飞行的核心部件,关乎到无人机的安全性和性能。
本文将基于STM32单片机,设计一种高效稳定的无人机飞行控制系统。
二、系统设计方案1. 硬件设计无人机飞行控制系统的硬件设计包括主控芯片选型、传感器选择与连接、无线通信模块等。
(1)主控芯片选型本系统选用STM32系列单片机作为主控芯片。
STM32单片机具有高性能、低功耗和丰富的外设接口等特点,适合用于嵌入式系统设计。
(2)传感器选择与连接无人机的稳定飞行依赖于姿态传感器、气压传感器等,用于实时测量无人机的姿态信息和气压信息。
通过SPI或I2C接口,将传感器与STM32单片机连接。
(3)无线通信模块为了实现与地面控制站的通信,本系统选用WiFi或蓝牙模块作为无线通信模块。
通过无线通信模块,实现无人机与地面控制站之间的数据传输和指令控制。
2. 软件设计无人机飞行控制系统的软件设计包括飞行控制算法的实现、通信协议的设计和图形界面开发等。
(1)飞行控制算法本系统采用PID控制算法实现无人机的稳定飞行。
PID控制算法能根据无人机的姿态信息,实时调整无人机的控制指令,使其保持稳定飞行。
(2)通信协议设计在无人机飞行控制系统中,需要设计一种通信协议,在无人机和地面控制站之间进行数据传输。
本系统采用串口通信协议,在硬件上通过UART接口实现无人机和地面控制站之间的数据交互。
(3)图形界面开发为了方便用户对无人机进行操作和监控,本系统设计了图形界面。
通过图形界面,用户可以实时查看无人机的姿态信息、图像传输和设置飞行参数等。
三、系统实现及测试在系统设计完成后,需要进行实际的硬件搭建和软件开发。
在硬件搭建过程中,需要将选用的传感器、无线通信模块等进行连接。
在软件开发过程中,需要编写飞行控制算法、通信协议和图形界面等。
基于ARM的自主无人直升机软件系统设计

无 人 机 是 一 个 极 具 挑 战 性 的 多 学 科 交 叉 的 前 沿 性 研 究 课
_
系 统结 构 图 如 图 1 1 示 — 所
20 0 8年第 1 2期
福
建
电
脑
5
基于 A M 的 自主无人直升机软件 系统设计 R
蔡伟峰 ,裴海龙 ,刘栋炼
(华 南理 工 大 学 自动 化科 学 与工 程 学 院 广 东 广 州 5 0 4 ) 16 0
【 摘
要】 :根据 小型无人 直升机 飞பைடு நூலகம்控制 系统 高性 能 , 小体积等特 点 , 出并设计 实现 了以 AI 1 A 7 E5 2 ̄ 提 ' S M S (1) ' 9
器
作 为核 心 的 自主 无人 直 升 机 控 制 系统设 计 方 案 。 详 细 描 述 了整 个 系统 的 软 硬 件 构 架 , 出 了具 体 的 控 制 实 现 方 案 , 点 介 绍 提 重
了 飞行 控 制 软 件 的 各 个 模 块 的 功 能 。 程 图 以及 代 码 实现 。 流
【 关键词】 :小 型无人直 升机 ; 飞行控 制 系统 ; a a K l n滤波; I m PD控 制; RM A
面 站模 块 各 模 块 主 要完 成 的任 务 如下 : 1 数 据 采集 与处 理 模 块 : 集 I U、 子 罗 盘, 纳 , P ) 采 M 电 声 G S数 题 作 为 空 中 机 器人 的无 人 驾 驶 直 升 飞 机 。在 军 事 上 可 用 于 侦 据 . 及 遥 控 P M 信 号 以 C 2 滤 波 与 控 制 模 块 :姿态 的解 算 以 及控 制 算 法 计 算并 输 出 1 察 、 视 等 , 民 用上 可 用 于 大 地 测 量 、 感 等 。 用 范 围的 不 断 监 在 遥 应 扩 大对 无 人 机 的 性能 提 出 了更 高 的 要 求 ,包 括 系统 稳 定 性 和 控 控 制 量 制 精 度 的要 求 。其 中 作 为 主 控 器 的 C U 的 性 能 更 是 重 中之 重 。 P 3 通 讯模 块 : 站 和地 面 站 的通 讯 1 机 4 1地 面 站 模 块 :实 时 监 控 飞 机 的 飞 行 状 态 以及 在 线 调 节 主 控 器 在 整 个 无 人 机 系 统 中扮 演 着 l 脏 ” 重 要 角 色 . 的 基 I | 的 它 本 功能 是 实 现 高性 能 的 自 主导 航 、 自动 飞行 控 制 、 务 管 理 和 手 P D参 数 任 I 自控切 换 等 任 务 21数 据 采 集 与 处 理 模块 . 导 航 传 感 器 信 号 的 准 确性 、 时性 、 实 可靠 性 直 接 影 响 着 飞 行 基 于 上 面 的 系 统 需 求 .我 们 选 用 高 性 能 的 3 2位 微 控 制 器 A 9 S M7 E5 2作为 主 控 器 . 过 配 备 协 处 理 器 ME A T 1A S (1) 通 G 8单 片 控 制 系 统 的 控 制 性 能 。 图 l 1所示 。 R 如 一 A M7通 过 C M O 0经 过 数 机 、 性 能 的接 口转 化 电 路 、 定 的 电源 模 块 等 构 建 飞 行 控 制 计 传 电 台 跟 地 面 通 讯 .通 过 C M1 M G 8通 讯 采 集 P M 信 高 稳 O 跟 E A C 算 机 . 丰 富 的外 围 传 感 器模 块 、 载 伺 服 系 统 等 构 成 了一 套 高 号 .通 过 D G 口采 集 C) 据 .通 过 S I 与 机 BU I S数 P 口采 集 I ,0 MUC M. 性 能 、 功 耗 、 积 小 的 自主无 人 直 升 机 硬 件 系 统 , 在 硬 件 系 P S 低 体 并 A S信 号 . 采集 信 号 的周 期 为 3 H , 0 Z 由定 时 器 T 1 时 中 断 产 c 定 统 上 . 们设 计 了一 套 可行 的 导航 软件 , 中 包 括 机 载 软 件 和 地 生 。 我 其 面 站监 控 软 件 211串 口采 集 数 据代 码 实 现 .. 由 于 串 1数 据 通 讯数 据吞 吐 量 大 . C M C M1都 是 均 : 3 故 O O、 O 1 硬件 系统 构 架 自主无 人 直 升 机 硬件 系统 是 由飞 行 控 制 计 算 机 、传 感 器 系 通 过 D MA 方 式 跟 外 设 通 讯 的 。 以 C MO接 收地 面 站 PD参 数 O I 统 、 载伺 服系 统 、 面检 测 系 统 、 据 传 系 统 等组 成 。 行 控 制 词 整 数 据 为 例 说 明其 实 现 细 节 : 机 地 数 飞 vi atii( od)/l 化 COM odUsr nt vi /a始 _  ̄ 0 计 算机 的核 心 是 A 9 S M S (1) T 1 A T E5 2。传 感 器 系 统 由惯 性 测 量 元 卜” 件 (^ 、 Il 电子 罗  ̄(O A S、 P u) C MP S)G S和  ̄ (O A t 成 。伺 服 S N r组 ) , 口 设 置 。 步 模 式 下 :btItp,op ry_ 特 率 :1 20 / 串 异 8 i,s n ai 波 o t 150 控 制 系统 由 滚转 、 仰 、 向 、 门和 总 矩这 五个 舵 机 组 成 。 据 俯 航 油 数 AT 1 U _ o fue ( O O A 9 B MC ,T 1 — S A Y C M D , 9 F ¥ C n g r C M , T 1 . KA 9C. _ S N _ O E i . U 传 输 系 统 主 要 由 两 台 Dg 公 司 的 X 0 一 IN 数 传 电 台 构 成 。 i i T 9 S— A 1 5 0 O; 1 2 0, )
基于ARM的SCARA机器人控制系统的设计与实现
巨 } 一
—
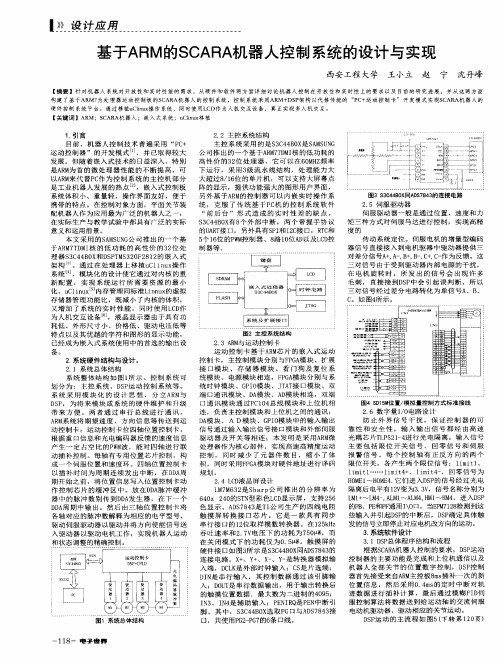
图3 S 3 C 4 4 B O X 同A D S 7 8 4 3 的 连 接 电 路
2 . 5 伺 服 驱 动 器 伺 服 驱动 器 一 般 是 通 过 位 置 、 速 度 和 力 矩 三 种 方 式 对 伺 服 马 达 进 行 控 制 ,实 现 高 精 度 的 传 动 系 统 定 位 。伺 服 电 机 的 增 量 型 编 码 器 信 号 直 接 接 入 到 电 机 驱 器 中 驱 动 器 提 供 三 对 差 分 信 号A + , A 一 , B + , B 一 , c + , C 一 作 为 反馈 。 这 三 对 信 号 由于 受 到 驱 动 器 内 部 电 源 的干 扰 , 在 电机 旋 转 时 , 所 发 出 的 信 号 会 出 现 许 多 毛 刺 ,直接接  ̄ U D S P 中会 引 起 误 判 断 ,所 以 三 对 信 号 经 过 差 分 电路 转 化 为 单 信 号A 、B、 c 。如 图4 所示 。
【关键 词 】ARM;S C AR A机 器 人 ;嵌 入 武 系统 ;u C l i n u x 移 植
1 . 引 言
目前 , 机 器 人 控 制 技 术 普 遍 采 用 “ P C + 运 动 控 制 器 ” 的开 发 模 式 …, 并 已取 得 较 大 发 展 。但 随 着 嵌 入 式 技 术 的 曰益 深 入 , 特 别 是A R M 为 首 的 微 处 理 器 性 能 的 不 断 提 高 , 可 以A R M 来代 替P c 作 为 控 制 系 统 的 主 控 机 部 分 是 工 业 机 器 人 发 展 的 热 点 , 嵌 入 式 控 制 板 系 统 体 积 小 、 重 量 轻 , 操 作 界 面 友 好 , 便 于 携 带 的特 点 。 在 控 制 对 象 方 面 ,平 面 关 节 装 配机器 人作为应用最 为广泛的机器人 之一 , 在 实 际 生 产 与 教 学 试 验 中 部 具 有 广 泛 的 实 际 意义和运用前景 。 本 文采用 的S A M S U N G 公 司 推 出 的 一 个 基 于A R M 7 T D M I 核 的低 功耗 的 高性 价 的3 2 位 处 理器 s 3 c 4 4 B O x 和D s P T M s 3 2 O F 2 8 1 2 的 嵌 入 式 架构 。通过 在处 理器上 移植u C l i n u x 操 作 系 统 J ,模 块 化 的设 计 使 它 通 过 对 内 核 的重 新 配 置 , 实 现 系 统 运 行 所 需 要 资 源 的 最 小 化 。u C 1 i n u x 内存 管 理 同标 准 L i n n u x 的虚 拟 存储 器管理功 能比,既减小 了内核的体积 , 又增 加 了 系 统 的 实 时 性 能 。 同 时 使 用 I C D 作 为 人 机 交 互 设 备 ,液 晶 显 示 器 由 于 具 有 功 耗 低 、 外 形 尺 寸 小 、 价 格 低 、驱 动 电压 低 等 特 点 以 及 其 优 越 的 字 符 和 图形 的 显 示 功 能 , 已经 成 为 嵌 入 式 系 统 使 用 中 的 首 选 的 输 出设
《2024年基于STM32单片机的无人机飞行控制系统设计》范文

《基于STM32单片机的无人机飞行控制系统设计》篇一一、引言随着科技的不断发展,无人机技术已成为当今的热门研究领域。
而无人机的核心部分,即飞行控制系统的设计,更是其成功的关键。
本文将详细介绍基于STM32单片机的无人机飞行控制系统设计,包括其设计原理、硬件构成、软件实现以及性能评估等方面。
二、设计原理本设计基于先进的飞行控制算法,采用模块化设计思路,实现对无人机飞行的稳定控制。
飞行控制系统以STM32单片机为主控芯片,结合陀螺仪、加速度计等传感器,实时采集无人机的飞行状态信息,并通过PID控制算法,实现对无人机的姿态调整和飞行控制。
三、硬件构成1. 主控芯片:选用STM32F4系列高性能单片机,具备高运算速度和低功耗特性,满足无人机飞控系统对实时性和稳定性的要求。
2. 传感器模块:包括陀螺仪、加速度计等,用于实时采集无人机的飞行状态信息。
3. 电机驱动模块:采用PWM(脉宽调制)信号控制电机驱动器,实现对电机的精确控制。
4. 通信模块:采用无线通信技术,实现与地面控制站的实时数据传输和指令接收。
四、软件实现1. 操作系统:采用实时操作系统(RTOS),实现对任务的优先级管理和调度,确保系统的实时性和稳定性。
2. 传感器数据处理:通过传感器模块采集到的数据,经过滤波、校准等处理后,输出给主控芯片进行计算。
3. PID控制算法:根据传感器数据,通过PID控制算法计算输出控制量,实现对无人机的姿态调整和飞行控制。
4. 任务管理:根据任务优先级和系统资源情况,合理分配和控制各个任务的执行。
五、性能评估本设计具有以下优点:1. 高精度:采用高精度传感器和PID控制算法,实现对无人机飞行的精确控制。
2. 高稳定性:采用实时操作系统和模块化设计,提高系统的稳定性和可靠性。
3. 低功耗:选用低功耗主控芯片和优化软件算法,降低系统功耗。
4. 易扩展:采用标准化接口和模块化设计,方便后续的升级和维护。
经过实际测试和飞行实验,本设计的无人机飞行控制系统具有良好的飞行性能和稳定性,可满足各种应用场景的需求。
基于ARM嵌入式系统的拟人机器人控制器的设计

基于ARM嵌入式系统的拟人机器人控制器的设计拟人机器人是一类具有人类外貌和行为特征的机器人,它们能够与人类进行交互和沟通,具备一定程度的情感和智能。
一个高效可靠的控制系统对于拟人机器人的性能和功能至关重要。
本文将基于ARM嵌入式系统,设计一个拟人机器人控制器,包括硬件设计和软件实现。
一、硬件设计1. 处理器选择拟人机器人的控制系统需要具备强大的处理能力和低功耗的特点,因此选择了基于ARM架构的处理器。
ARM处理器具有高性能、低能耗、多核心并行计算等特点,非常适合嵌入式系统应用。
2. 传感器和执行器拟人机器人需要使用多种传感器采集环境信息,并通过执行器执行各种动作。
传感器包括视觉传感器、声音传感器、触摸传感器等,执行器包括舵机、电机等。
在硬件设计中,需要合理选择和布置传感器和执行器,确保其能够满足机器人各项功能需求。
3. 通信模块拟人机器人需要通过网络进行远程控制和与其他设备进行通信。
因此,在硬件设计中需要考虑添加适当的通信模块,如Wi-Fi模块、蓝牙模块或者以太网模块,以实现机器人的远程控制和与其他设备的数据交换。
二、软件实现1. 实时操作系统(RTOS)拟人机器人的控制系统需要实时响应和处理多种任务,因此需要选择一款适合嵌入式系统的实时操作系统。
RTOS具有任务调度和响应速度快的特点,能够满足实时控制的要求。
2. 控制算法拟人机器人的控制算法是实现其智能行为的核心。
控制算法是一套复杂的规则和逻辑,包括感知、决策和执行等过程。
在软件实现中,需要针对机器人的具体功能和任务,设计和实现相应的控制算法。
3. 用户界面拟人机器人需要与用户进行交互,因此需要设计用户界面。
用户界面可以通过显示屏、触摸屏等方式实现,提供机器人的状态显示、操作控制等功能,使用户可以直观地与机器人进行沟通和控制。
4. 远程控制为了方便用户对拟人机器人进行远程控制,需要设计远程控制的相关功能。
远程控制可以通过手机应用、电脑软件等方式实现,使用户可以随时随地地控制机器人的动作和行为。
一种基于ARM的教学机器人控制系统的设计

s t i h p o e he f a i ii r r s n e tt e e d o hi a e .Th y tm ss t b e t t d h ui wh c r v d t e sblt we e p e e t d a h n ft s p p r s y e s se i ui l o su y t e a d srb t d mu ia e t h o p rto n r n fmu ir bo 、 t ln a d o sa l v ia c fmo i it u e t- g n ,t e c o e ai n a d hamo y o t—o t pah p a n b tce a od n e o bl i e r b ti o e c n g r t n d n mi ic msa c , n ui b e t o t a lr b tt o o o n n n - o f u a i y a c cr u t n e a d s t l o f ob l o o o . i o a Ke r s:e c n o o ; o to y tm ; y wo d ta hig r b t c n r ls se ARM ; LM62 9
肖海荣 周风 余 宋洪军 罗 , , , 晓 刘 , 涛
( .山东交通学院信息工程系, 济南 202 ; 2 1 503 .山东大学控制科学与工程学院 , 济南 206 ) 50 1
无人机飞控系统设计及其实现

无人机飞控系统设计及其实现随着科技的发展,无人机已被广泛应用于各个领域,如军事侦察、民用航拍、环境监测等。
无人机作为新型智能飞行器,其最核心的部分就是飞控系统。
无人机飞控系统是指控制无人机运动的计算机程序和硬件,在无人机中扮演着“人脑”的角色,负责接收传感器的数据、计算运动控制指令并实现航线控制。
因此,一个性能稳定、可靠性高、功能丰富的飞控系统对于无人机的安全和稳定飞行至关重要。
一、无人机飞控系统设计流程1. 确定飞控系统需求首先确定飞控系统的需求,明确其飞行任务、负载要求、控制方式等。
不同的需求将影响飞控系统硬件、软件的设计和实现。
2. 选择基础硬件和软件平台选择适合的基础硬件和软件平台是设计的一个重要环节。
硬件平台需要适应不同的需求,如可靠性、重量、功耗等。
软件平台则需要支持完整的开发调试环境,可编程性和算法优化等。
3. 设计集成电路根据需求,设计控制器、调节器等集成电路,支持无人机发射、驱动舵机、传感器信号采集、数据处理等功能。
4. 编写嵌入式软件编写嵌入式软件,实现无人机飞行控制、图像处理、数据处理等功能。
5. 构建通讯模块通讯模块是控制无人机和地面控制台之间信息传递的桥梁,需要确定通讯协议和通讯速率,以实现数据传输。
6. 集成实现将各模块集成实现,实现无人机飞行控制、通讯、数据处理等功能。
二、无人机飞控系统核心技术1. 传感器传感器主要负责采集无人机周围环境的信息,如气压、温度、加速度、陀螺仪等。
具体传感器种类因需求而异,不同传感器能够获取的信息也不同,需要进行选型设计。
2. 姿态算法姿态算法是控制无人机在空中盘旋、前进、后退、左右移动的核心算法。
基于传感器采集的数据,通过运动状态估计、卡尔曼滤波、状态预测等算法实现无人机的姿态控制。
3. 路径规划算法路径规划算法用于规划无人机的飞行路径,根据飞行器运行状态和允许的运动幅度等因素进行计算,实现自主飞行。
4. 控制指令生成算法控制指令生成算法是飞控系统的内核,负责实现无人机的运动控制。
无人机自主飞行路径规划与控制系统设计

无人机自主飞行路径规划与控制系统设计摘要:随着无人机技术的飞速发展,无人机的自主飞行已经成为一个热门研究领域。
本文主要介绍了无人机自主飞行路径规划与控制系统的设计。
首先,介绍了路径规划的概念和目的,然后详细讨论了无人机自主飞行的路径规划算法,并分析了各种算法的优缺点。
接着,介绍了无人机的控制系统设计,包括传感器选择、动力系统设计和控制策略设计。
最后,通过模拟实验验证了该系统的有效性。
关键词:无人机,自主飞行,路径规划,控制系统,算法1. 引言无人机技术的快速发展使得无人机在军事、民用和商业领域中得到了广泛应用。
无人机的自主飞行能力成为了人们研究的一个重点问题。
自主飞行路径规划与控制系统的设计对于实现无人机的自主飞行至关重要,能够提高无人机的飞行效率和安全性。
因此,本文旨在探索无人机自主飞行路径规划与控制系统设计的方法。
2. 路径规划的概念和目的路径规划是指根据无人机的起点和终点,以及约束条件,找到让无人机从起点到终点的最佳路径的方法。
路径规划的目的是使无人机能够安全、高效地飞行到目标区域。
现有的路径规划算法包括A*算法、蚁群算法、遗传算法等。
这些算法在不同的情况下有不同的适用性和效果。
3. 无人机自主飞行的路径规划算法无人机自主飞行的路径规划算法包括基于图搜索的方法、基于采样的方法和基于经验的方法。
其中,基于图搜索的方法通过构建图模型来表示空间状态和运动规划,然后使用搜索算法来找到最佳路径。
基于采样的方法通过在空间中采样点来进行运动规划,然后利用优化算法找到最佳路径。
基于经验的方法是指通过分析历史数据和经验来进行路径规划。
以A*算法为例,首先通过建立无人机的状态空间图,然后利用启发函数评估每个节点的价值,最后找到路径中的最佳节点。
4. 无人机的控制系统设计无人机的控制系统设计包括传感器选择、动力系统设计和控制策略设计。
传感器选择是指选择合适的传感器来获取所需的信息,以便更好地感知环境和无人机自身状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1期 2010年1月工矿自动化Industry and Mine AutomationNo.1 Jan.2010 文章编号:1671-251X (2010)01-0111-04基于ARM 的空中机器人飞行控制系统的设计曲晓雷1, 曹云峰2(1.南京航空航天大学自动化学院,2.南京航空航天大学高新技术研究院,江苏南京 210016) 摘要:提出了一种基于A RM9内核的嵌入式处理器S3C2440的空中机器人飞行控制系统的设计方案,详细介绍了系统的硬件结构组成及基于嵌入式Linux 操作系统的飞行控制软件设计,并描述了软件的功能划分和控制策略的实现。
该飞行控制系统使空中机器人具备遥控遥测、指令处理、姿态控制飞行和自主导航等功能,成本低、性能高。
关键词:空中机器人;飞行控制系统;ARM ;嵌入式Linux 中图分类号:TP273 文献标识码:BDesign of Flight Cont rol System for Aerial Robot Based on A RMQU Xiao 2lei 1, CAO Yun 2feng 2(1.College of Automation Engineering of Nanjing University of Aeronautics and Astronautics ,Nanjing 210016,China. 2.Academy of Frontier Science of Nanjing University of Aeronautics andAst ronautics ,Nanjing 210016,China ) Abstract :The paper p ropo sed a design scheme of flight co nt rol system for aerial robot designed wit h embedded p rocessor S3C2440based on ARM9kernel ,int roduced composition of t he system’s hardware st ruct ure and design of flight control software based on embedded Linux operation system in details ,and described f unctions division of system software and realization of cont rol st rategy.The flight control system makes aerial robotics have f unctions of remote cont rol and telemet ry ,instructions processing ,attit ude stabilized flight and autonomous navigation ,which has low co st and high performance.K ey w ords :aerial robot ,flight cont rol system ,ARM ,embedded Linux 收稿日期:2009-09-18作者简介:曲晓雷(1983-),男,山东青岛人,南京航空航天大学自动化学院在读硕士研究生,主要研究方向为微小型飞行器。
E 2mail :quxiaoleihanhong @0 引言空中机器人(Aerial Robotics )是指各种搭载了GPS 、机载导航设备、视觉识别设备以及无线通信设备等,能够在一定区域范围内无人自主飞行,完成目标探测以及定位跟踪等任务的飞行器[1]。
国际上对空中机器人的研究大都是围绕一年一度的国际空中机器人竞赛(IA RC ,International ’s Aerial Robotics Competition )来进行的。
由于比赛的刺激和推动,在世界范围内掀起了研究和开发空中机器人技术的浪潮,技术水平和人才培养飞速进步。
1992年,Georgia 理工大学的空中机器人第一个完成自主起飞、飞行和着陆。
3年后,斯坦福大学的空中机器人则能够让直升机从飞行地区的某一处自动抓取一个目标物体,并将其移动到飞行地区的另一处。
在2007年的第17届国际空中机器人大赛中,Georgia 理工大学的空中机器人已经能够完成3km 外房屋搜索和确定房屋门窗的位置,但是还不能拍摄房屋内部照片[2]。
遗憾的是,虽然国际空中机器人技术发展迅猛,却鲜见国内队伍参加国际空中机器人大赛,空中机器人的研制水平也远远落后于国际水平。
国内对空中机器人的研究主要是围绕着中国空中机器人大赛进行的。
在该大赛的刺激下,国内的空中机器人近年来也小有发展和进步。
目前,固定翼空中机器人能够完成自主飞行4km 、无线图象传输、地面图象处理等任务;旋翼空中机器人当中,浙江大学的“玉泉之翼”空中机器人在2005年完成了自主悬停1min 。
一个典型的空中机器人系统至少应该包括飞行器、飞行控制系统、地面控制站、任务载荷和数据链路5个部分,其中飞行控制器是空中机器人的核心部分。
本文主要针对微小型固定翼空中机器人的飞行控制系统来进行设计与实现。
1 系统总体设计方案空中机器人系统的组成如图1所示。
其中飞行控制系统是空中机器人的“大脑”,指挥着空中机器人的一举一动,使空中机器人能在没有外界操纵干预的情况下完成自主飞行、目标识别、数据和图象采集与传输等智能化的任务。
图1 空中机器人系统的组成框图 空中机器人应能够实现自主导航飞行并按规定的航线飞行,且具备目标搜索和识别功能。
自主导航飞行主要靠飞行控制系统来实现,故飞行控制系统是空中机器人的核心。
根据空中机器人基本功能的要求,空中机器人飞行控制系统的导航与控制原理如图2所示。
图2 空中机器人飞行控制系统的导航与控制原理图 根据系统要求以及国内外微小无人机设计方案,笔者提出了一种基于A RM9内核的嵌入式处理器S3C2440的空中机器人飞行控制系统的设计方案。
随着空中机器人体积的减小,空中机器人本身固有频率增大,这就要求角速率陀螺和加速度计有较高的响应频率(高度的测量延时对系统稳定的影响相对较小)。
因此,在空中机器人的飞行控制系统当中,陀螺、加速度计等传感器的更新频率、舵机的响应频率、飞行控制系统的控制频率等至少为50Hz 。
这对空中机器人的整体设计和器件的选取具有指导性意义。
2 系统硬件设计鉴于微小型空中机器人的体积、重量和功耗等都有严格的限制,笔者依据空中机器人的功能需求,利用M EMS (微电子机械系统)技术,按照一体化集成、动态基础上性能优化的原则设计了空中机器人飞行控制系统,其硬件组成如图3所示,主要包括微型航姿仪(包括角速率陀螺、加速度计、磁航向计)、微型高度计、GPS 接收机、飞控计算机、无线数据通信接口(遥控/遥测)、舵机控制接口、有效任务载荷接口以及电源等。
图3 空中机器人飞行控制系统的硬件组成图2.1 处理器单元飞控计算机是飞行控制系统实现控制功能的核心,负责处理传感器数据,实现与GPS 接收机、机载无线电设备、摄像头、备用电路等设备接口的通信,执行控制和导航软件,操纵飞行器的伺服机构,使飞行器产生相应的动作。
基于上述要求,飞控计算机要求具有实时性、可靠性和嵌入性等特点。
实时性要求以最快的速度处理输入数据并以最短的延时输出控制信号。
可靠性要求抗干扰能力强,要有较宽的工作温度范围和抗电磁干扰能力等。
嵌入性要求体积尽量小、重量尽量轻。
飞控计算机以三星公司生产的S3C2440为处理器,属于ARM9系列微处理器。
A RM9系列微处理器在高性能和低功耗特性方面提供最佳的性能,支持多种主流嵌入式实时操作系统,其内核ARM920T 主频最高可达533M Hz 。
ARM2440资源主要有内存控制器、NAND FL ASH 控制器、时钟和电源管理单元、5个PWM 定时器、看门狗定时器模块、3个UAR T 异步串口、8路10位A/D 通道、2路SPI 接口、J TA G 调试接口、Camera 数码摄像机接口等。
其中,通过对4路定时器编程,可以很方便地产生PWM 输出信号用于控制舵机;而利用J TA G 调试接口进行软件下载,便于在线调试和・211・工矿自动化2010年1月 编程。
2.2 传感器单元要实现飞行器的自主稳定飞行,首先需要得到飞行器的纵向加速度、横向加速度、飞行器的高度、滚转角、俯仰角、航向角、机体滚转角速率、机体俯仰角速率、机体偏航角速率等9个状态变量。
如果能直接迅速、准确地测量出这9个状态是最理想的。
目前市场上有几款适合于微小无人机的IMU惯性测量产品,可以直接输出机体的姿态角,但其价格高达数十万,无法满足系统整体低价位的设计目标。
本文根据国内外微小无人机领域的低价位M EMS 传感器应用情况,采用ADXRS150微机械角速率陀螺、ADXL202加速度计,以及HMR3000磁力计模块作为姿态测量传感器。
2.3 执行机构单元控制执行机构选用Futaba伺服舵机,整个空中机器人执行机构分为4个部分:1个副翼舵、1个升降舵、1个方向舵、1个油门舵。
通过调整S3C2440自带的4个16位定时器输出的PWM波占空比来控制舵机偏转角度。
PWM信号周期定为20ms,每一路PWM控制信号脉宽范围为 1.05~1.95ms,通过PWM信号脉宽的变化来控制舵机在最大和最小2个位置之间变化,达到姿态控制效果。
3 系统软件设计空中机器人飞行控制系统是一个复杂的多任务系统,实时性要求很高。
嵌入式Linux操作系统因其实时性、高可靠性、广泛的硬件支持以及开放源码等众多特性,在嵌入式实时操作系统研究领域备受重视,因此,本文采用Linux2.6作为空中机器人飞行控制软件的设计平台,其实时性可以通过R TLinux补丁达到μs级,而其内核的健壮性早已在大量的实际应用中得到了验证[3]。
飞行控制软件设计遵循结构化设计原则,采用模块化设计方法,使之运行可靠、方便移植,并使程序调试方便,维护简单。
在嵌入式Linux平台下,整个飞行控制软件可以分为软硬件初始化模块、主循环程序模块、系统处理程序模块3个部分。
3.1 软硬件初始化模块该模块通过驱动程序打开硬件设备,完成硬件设备(SPI、ADC、PWM)及全局变量的初始化、计算飞行器初始状态和读取高度计初始高度值。
3.2 主循环程序模块鉴于空中机器人的飞行速度快和使用环境多变的特点,控制系统应当满足速度和瞬态响应方面的要求,要求控制系统在20ms的控制周期执行1次主循环程序。
采用信号量的方式来完成20ms的时钟同步循环,系统每20ms中断释放出1个信号量,当主循环接到信号量后开始执行程序。