多路工业过程参数巡检系统的设计
多路温度检测系统的设计与研究

1 绪论温度是一个很重要的物理参数,自然界中任何物理、化学过程都紧密地与温度相联系。
在工业生产过程中,温度检测和控制都直接和安全生产、产品质最、生产效率、节约能源等重大技术经济指标相联系,因此在国民经济的各个领域中都受到普遍重视。
温度检测类仪表作为温度计量工具,也因此得到广泛应用。
随着科学技术的发展,这类仪表的发展也日新月异。
特别是随着计算机技术的迅猛发展,以单片机为主的嵌入式系统已广泛应用于工业控制领域,形成了智能化的测量控制仪器,从而引起了仪器仪表结构的根本性变革。
1.1 温度检测类仪表的现状传统的机械式温度检测仪表在工矿企业中己经有上百年的历史了。
一般均具有指示温度的功能,由于测温原理的不同,不同的仪表在报警、记录、控制变送、远传等方面的性能差别很大。
例如热电阻温度计,它的测温范围是-200℃~650℃,测量准确,可用于低温或温差测量,能够指示报警、远传、控制变送,但维护工作量大并且不能记录;光学温度计测温范围是300℃~3200℃,携带使用方便,价格便宜,但是它只能目测,也就是说必须熟练才能测准,而且不能报警、远传、控制变送。
近年来由于微电子学的进步以及计算机应用的日益广泛,智能化测量控制仪表己经取得了巨大的进展。
我国的单片机开发应用始于80 年代。
在这20 年中单片机应用向纵深发展,技术日趋成熟。
智能仪表在测量过程自动化,测量结果的数据处理以及功能的多样化方面。
都取得了巨大的进展。
目前在研制高精度、高性能、多功能的测量控制仪表时,几乎没有不考虑采用单片机使之成为智能仪表的。
从技术背景来说,硬件集成电路的不断发展和创新也是一个重要因素。
各种集成电路芯片都在朝超大规模、全CMOS 化的方向发展,从而使用户具有了更大选择范围。
这类仪器能够解决许多传统仪器不能或不易解决的问题,同时还能简化仪表电路,提高仪表的可靠性,降低仪表的成本以及加快新产品的开发速度。
智能化控制仪表的整个工作过程都是在软件程序的控制下自动完成的。
巡检系统方案

巡检系统方案一、方案概述巡检系统是一种用于管理和执行巡检任务的软件系统。
它提供了数据采集、任务调度、异常报警等功能,能够帮助企业提高巡检效率和管理水平。
本文将介绍一个具体的巡检系统方案,包括系统架构、功能模块和实施步骤。
二、系统架构1. 前端界面巡检系统的前端界面应该简洁明了,便于操作人员使用。
它应该包括任务列表、数据展示、异常报警等功能模块,并支持自定义配置和个性化设置。
2. 后端服务器后端服务器是巡检系统的核心,它负责处理数据采集、任务调度、异常处理等核心功能。
服务器应该采用高性能、稳定可靠的硬件设备,并配置相应的数据库和网络设备,以保证系统的正常运行。
3. 数据库巡检系统需要一个可靠的数据库来存储采集到的数据和系统相关信息。
数据库应该具备高速读写、可扩展性好等特点,并能够确保数据的安全性和一致性。
4. 通信模块巡检系统需要与设备、传感器等数据源进行通信,以实时采集数据和控制设备。
通信模块应该支持各种常见的通信协议,并具备高速、稳定的传输能力。
5. 安全管理巡检系统需要具备一定的安全管理能力,包括数据的加密传输、用户权限管理、操作日志记录等功能,以保证系统的安全性和数据的完整性。
三、功能模块1. 任务管理巡检系统的任务管理模块负责创建、调度和执行巡检任务。
管理员可以通过任务管理模块设置任务的执行周期、巡检点位、权限等信息,并实时监控任务的执行情况。
2. 数据采集数据采集是巡检系统的核心功能之一,它负责从设备、传感器等数据源获取实时数据,并将数据存储到数据库中。
数据采集模块应该具备高速、准确的数据采集能力,并支持多种数据格式和接口协议。
3. 数据展示数据展示模块用于将采集到的数据以图表、报表等形式展示给用户。
用户可以通过数据展示模块查看历史数据、统计分析等信息,并根据需要进行导出和分享。
4. 异常报警异常报警是巡检系统的重要功能之一,它能够及时发现和处理设备故障、异常情况,并通过短信、邮件等方式通知相关人员。
多路巡检仪说明书
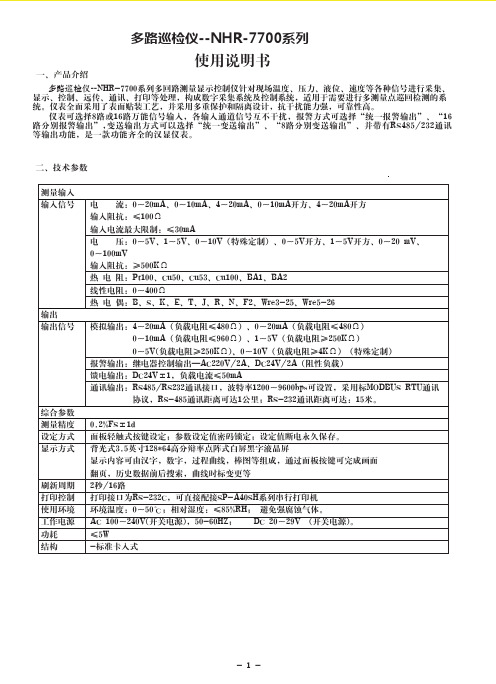
0.2%FS±1d 面板轻触式按键设定;参数设定值密码锁定;设定值断电永久保存。 背光式3.5英寸128*64高分辩率点阵式白屏黑字液晶屏 显示内容可由汉字,数字,过程曲线,棒图等组成,通过面板按键可完成画面 翻页,历史数据前后搜索,曲线时标变更等 2秒/16路 打印接口为RS-232C,可直接配接SP-A40SH系列串行打印机 环境温度:0~50℃;相对湿度:≤85%RH; 避免强腐蚀气体。 AC 100~240V(开关电源),50-60HZ; DC 20~29V (开关电源)。 ≤5W -标准卡入式
刷新周期 打印控制 使用环境 工作电源 功耗 结构
电 流:0~20mA、0~10mA、4~20mA、0~10mA开方、4~20mA开方 输入阻抗:≤100Ω 输入电流最大限制:≤30mA 电 压:0~5V、1~5V、0~10V(特殊定制)、0~5V开方、1~5V开方、0~20 mV、 0~100mV 输入阻抗:≥500KΩ 热 电 阻:Pt100、Cu50、Cu53、Cu100、BA1、BA2 线性电阻:0~400Ω 热 电 偶:B、S、K、E、T、J、R、N、F2、Wre3-25、Wre5-26
多路巡检仪--NHR-7700系列
使用说明书
一、产品介绍
多路巡检仪--NHR-7700系列多回路测量显示控制仪针对现场温度、压力、液位、速度等各种信号进行采集、 显示、控制、远传、通讯、打印等处理,构成数字采集系统及控制系统,适用于需要进行多测量点巡回检测的系 统。仪表全面采用了表面贴装工艺,并采用多重保护和隔离设计,抗干扰能力强,可靠性高。
出厂预置值 4
设定变送输出的放大比例
0:无小数点心 1:小数点在十位(显示XXX.X) 2:小数点在百位(显示XX.XX) 3:小数点在千位(显示X.XXX) 设定变送输出的下限量程
多路流量巡检仪的研制
控,可 测计 显 量 件 制统自 量算 示 . 系 动 、并 流 硬
1 1 单片 机 的选 用 .
电 见 . 路 图1
匝砸
lI
.J
t ———————_-J _
I
片. l + _ { 冒
受因
根据 应 用 系统 功能 要求 , 虑 低成 本 、 考 小体
图1 巡检仪硬件电路 图
余系统 . 在对油水路流量手动控制的系统 中, 为保证流量控制精度 , 把油水路的整个流量范 围分成 5 个流 量段 , 相应 地将 油水 管道 各分 为 5个 管排 , 盖从 低 到 高整 个 流 量 范 围 , 个 管排 采 用 一 个 适 合 其 流量 并 覆 每
范 围的涡 轮流 量 传感 器 .为此 , 者设 计 开发 了一 套智 能 多 管 路 流 量 巡 回检 测 系统 , 合 手 动 调节 阀 , 笔 配 完
成 油 水路 流量 控 制 .
该 巡 检仪 以单 片机技 术 为核 心 , 利用 多 路模 拟 开关 实现 多 路巡 检 ; 择 非挥 发 陛数 据存 储 器作 为计 算 选 参 数存 储 器 ; 通过 对 涡轮 流量 传感 器 的脉 冲采样 , 算选 定 通 道 的 瞬 时流 量 并 显 示 出来 ; 当 调节 流 量 控 计 适 制阀门, 可使 油 、 2路 混合 流 量达 到 预期 值 , 水 完成 测井 仪器 的标定 工 作 .
多 路 流 量 巡 检 仪 的研 制
贺 莳
(大庆油 田有 限责任公 司 测试技术服务 分公司 , 黑龙江 大庆 135 64 3)
摘
要 : 制 了一 种 以 85 单 片 机 为 核 心 的 多 路 流 量 巡 检 仪 .该 巡 检 仪 是 利 用 多 路 模 拟 开 关 实 现 多 路 巡 检 , 用 研 71 利
多路温度检测系统的设计_毕业设计(论文)
多路温度检测系统的设计_毕业设计(论⽂)多路温度检测系统的设计摘要随着现代信息技术的飞速发展,温度测量控制系统在⼯业、农业及⼈们的⽇常⽣活中扮演着⼀个越来越重要的⾓⾊,它对⼈们的⽣活具有很⼤的影响,所以温度采集控制系统的设计与研究有⼗分重要的意义。
本次设计的⽬的在于学习基于51单⽚机的多路温度采集控制系统设计的基本流程。
本设计采⽤STC89C52单⽚机作为数据处理与控制单元,采⽤温度传感器PT100进⾏温度的采集把温度的物理量转化为电阻值。
然后通过PT100温度变送器把PT100温度传感器的电阻值转化为0-5V的电压值。
然后通过PCF8591AD转化模块把变换后的电压值转化为数字量。
最终传给单⽚机系统。
此设计有两个按键控制两路温度的显⽰切换。
从⽽达到多路监测的⽬的。
⽽且本次设计设有两个LED显⽰等分别表⽰正常温度和⾮正常温度两种形式。
正常温度转化为⾮正常温度的临界值可由键盘设定来达到实际⼯作的要求。
关键词:单⽚机,温度传感器,温度变送器,AD转化模块,I2C总线ABSTRACTWith the rapid development of modern information technology, temperature measurement and control system in industry, agriculture and people's daily life plays an increasingly important role in people's daily life, it has a great impact, so the temperature of the control system design and research are very important. This design aims to study based on 51 single-chip temperature acquisition and control system design of the basic flow. This design adopts STC89C52 chip as the data processing and control unit, with the temperature sensor PT100 gathering the temperature physical quantity into a resistance value. Then through the PT100 temperature transmitter PT100 temperature sensor resistance value into a 0-5V voltage value. Then through PCF8591 AD conversion module to transform the voltage value is converted into digital quantity. Finally to the microcontroller system. This design has two buttons control the two temperature display toggle to achieve the purpose of multi-channel monitoring. And the design of a two LED display respectively expressed in normal temperature and normal temperature two forms. Normal temperature into a normal temperature threshold may by the keyboard set up to achieve the demand of practical work.Key words: single chip, temperature sensor, temperature transmitter, AD conversion module, Inter-Integrated Circuit⽬录1引⾔ (1)1.1 课题研究的背景 (1)1.2 课题研究的⽬的和意义 (1)1.3 本⽂主要研究内容 (2)2硬件电路的设计 (3)2.1 系统设计的框架 (3)2.2 单⽚机的选型 (4)2.2.1STC89C52单⽚机的简介 (4)2.2.2STC89C52单⽚机时序 (4)2.2.3STC89C52单⽚机引脚介绍 (5)2.3 PCF8591AD转化模块 (7)2.4 PT100温度变送器 (9)2.5 PT100温度传感器 (11)2.5.1 设计原理 (11)2.5.2 应⽤范围 (11)2.5.3 分度表 (11)2.5.4 PT100温度传感器三根芯线的接法: (13)2.6 LCD1602显⽰器 (15)2.7 LED指⽰灯电路 (23)2.8 按键电路 (23)2.9 晶振电路 (24)3 系统软件设计 (25)3.1 I2C总线设计 (25)3.1.1 I2C总线特征 (25)3.1.2 I2C总线术语 (25)3.1.3 I2C总线位传输 (25)3.1.4数据的有效性 (26)3.1.5 起始和停⽌条件 (26)3.1.6 I2C总线数据传输 (27)3.2总流程图 (28)结论 (29)参考⽂献 (30)致谢 (31)附录A:系统原理图 (32)附录B:系统相关程序 (33)1引⾔1.1 课题研究的背景⼯业控制是计算机的⼀个重要应⽤领域,计算机控制系统正是为了适应这⼀领域的需要⽽发展起来的⼀门专业技术,它主要研究如何将计算机技术、通过信息技术和⾃动控制理论应⽤于⼯业⽣产过程,并设计出所需要的计算机控制系统。
简易稳定多路温湿度巡检系统设计
2 0 1 3 年 8 月
黑 龙 江 八 一 农 垦 大 学 学 报
J o u r n a l o f H e i l o n g j i a n g B a y i A g r i c u l t u r l a U n i v e r s i t y
中图 分 类 号 : T S 2 1 3 . 4 文献 标 识 码 : A
De s i g n o f a S i mp l e a n d S t a b l e Mu l t i - c h a n n e l I n s p e c t i o n S y s t e m o f Hu mi t u r e
境要 求越 来 越严格 。环 境监 测ቤተ መጻሕፍቲ ባይዱ的必要性 显 而易见 , 以
仓库管理为例 , 防潮 、 防霉 、 防腐 、 防爆是仓库 日常工
作的重要 内容 , 是衡量仓库管理质量的重要指标 。 它 直接影响到储备物资的使用寿命和工作可靠性。但 传统的方法是用与湿度表 、 毛发湿度表 、 双金属式测 量 计 和湿 度 试纸 等 测试 器 材 , 通过 人 工进 行 检测 , 对 不符合温度和湿度要求 的库房进行通风 、去湿和降 温 等 工作 。这种 人 工测 试 方法 费 时 费力 、 效 率低 , 且 测试的温度及湿度误差大 , 随机性高。因此我们需要 种造价低廉 、使用方便且测量准确 的温湿度测量
Ke y wo r d s : i n s p e c t i o n s y s t e m; h u mi t u r e d e t e c t i o n ; DHT1 1 ;1 2 8 6 4 L C D
人 类 的 生 存 和社 会 中各 项 活 动 的 展 开 都 与 温 度、 湿 度密 切 相关 。随着 科 学技 术 的发 展 , 人 类在 不
PLC控制多路温度巡检系统解析

PLC控制多路温度巡检系统解析作者:***来源:《今日自动化》2020年第06期[摘要]PLC系统是目前的工业级控制系统,中文全称是可编程控制器,该控制系统由软件和硬件2部分组成。
使用可编程控制器进行温度系统控制,可以实现精确的温度控制,以满足工业生产要求。
对PLC控制多路温度巡检系统进行了研究,主要工具有由西门S7-200PLC、模拟量扩展模块EM231、K型热电偶传感器、加热电阻丝、交流接触器KM和电源开关组成,以构成研究对象并分析基于PLC的控制多路温度检查系统的内容。
结果為:①温度测量范围从0到100℃(测量误差不超过0.5℃)。
②可以实现8路通道温度检查功能。
③可以自动或手动检查以确定某条道路的温度。
④可以调整检查速度。
[关键词]PLC系统;温度控制;可编程控制器;工业需要[中图分类号]TP274.4 [文献标志码]A [文章编号]2095–6487(2020)06–00–03Analysis of PLC Controlled Multi-channel Temperature Inspection SystemWang Ti-kuo[Abstract]The PLC system is the current industrial-grade control system. The full Chinese name is Programmable Controller. The control system is composed of software and hardware. Using programmable controllers for temperature system control can achieve precise temperature control to meet industrial production requirements. The PLC control multi-channel temperature inspection system is researched. The main tools are Siemens S7-200PLC, analog expansion module EM231,K-type thermocouple sensor, heating resistance wire, AC contactor KM and power switch to form the research Object and analyze the content of PLC-based control multi-channel temperature inspection system. The results are: 1)The temperature measurement range is from 0 to 100℃(the measurement error does not exceed 0.5℃). 2)The temperature check function of 8 channels can be realized. 3)It can be checked automatically or manually to determine the temperature of a certain road. 4)The inspection speed can be adjusted.[Keywords]PLC system; temperature control; programmable controller; industrial needs1 概述温度控制系统也广泛用于工业生产中,并在化学、食品、冶金、建材、石油、机械等行业中占有重要地位,发挥着特别重要的作用。
多路巡回检测仪说明书2014

SP1
数字
11
第一报警回差值
P1h
数字
12
第一报警方式
P1c
代码
13
第二报警参数
SP2
数字
14
第二报警回差值
P2h
数字
15
第二报警方式
P2c
代码
16
第三报警参数或声光报警 SP3
数字
17
第三报警回差值或声定时 P3h
数字
18
第三报警或声光报警方式 P3c
代码
19
第四报警参数
SP4
数字
20
第四报警回差值
P4h
数字
9
上海恒争仪器仪表有限公司
21
第四报警方式
P4c
22
巡检 1-4 点允许设定
J-1
23
巡检 5-8 点允许设定
J-5
24
巡检 9-12 点允许设定 J-9
25
巡检 13-16 点允许设定 J-13
26
模拟输出设置
out
27
模拟输出起始通道设置 oun
28
第一过程量输出零点设置 odo
29
此时不改变 555 字码。 □ 按一下 SET 键,进入 C 菜单设置程序 1
显示:SP1(第一报警点设定)。 再按一下 SET 键,显示数字,设置报警点数值。
□ 再按一下 SET 键,进入设置程序 2, 显示:SP2(第二报警点设定)。
再按一下 SET 键,显示数字,设置报警点数值。
□ 再按一下 SET 键,进入设置程序 3, 显示:SP3(第三报警点设定)。
供 电 范 围 AC85V~AC220V 2) AC/DC24V 供 电 范 围 18V~36VAC/DC 8.工 作 环 境 : a、 温 度 : 0~ 50℃
巡查巡检系统方案

巡查巡检系统方案背景巡查巡检是指通过对某一区域、设备或系统进行定期巡查和检验,以确保其正常运行和安全性。
传统的巡查巡检方式通常是人工巡查,存在效率低、信息记录不准确等问题。
为解决这些问题,需要引入巡查巡检系统,通过技术手段提高巡查巡检的效率和准确性。
目标本文档旨在提出一个巡查巡检系统方案,从系统架构、功能模块、部署环境等方面进行详细介绍,并对实施过程和效果进行评估。
系统架构巡查巡检系统采用分布式架构,包括三个核心模块:前端、后端和数据库。
前端提供用户界面,支持用户巡查巡检任务的创建、查看和管理;后端负责处理前端的请求,与数据库进行交互并返回结果;数据库用于存储巡查巡检任务的相关数据。
系统架构示意图如下:+----------------+ +----------------+ +------------------+| 前端模块 |-----| 后端模块 |-----| 数据库模块 |+----------------+ +----------------+ +------------------+功能模块巡查巡检系统包括以下功能模块:1.用户管理:支持用户注册、登录、权限管理等功能,确保不同用户具有不同的操作权限。
2.巡查任务管理:用户可以创建、查看、修改和删除巡查任务,包括任务的名称、描述、周期、任务负责人等信息。
3.巡查计划生成:根据巡查任务的周期自动生成巡查计划,提醒巡查负责人进行巡查。
4.巡查记录管理:巡查负责人可以记录巡查的地点、时间、巡查情况等信息,并支持上传相关文档和照片。
5.巡查报告生成:根据巡查记录自动生成巡查报告,包括巡查情况的统计分析和异常问题的指标分析。
6.统计分析:对巡查任务和巡查记录进行统计分析,包括任务完成情况、巡查记录的时效性、异常问题的趋势等指标。
部署环境巡查巡检系统可以部署在云服务器或本地服务器上,具体的部署环境需根据实际需求进行选择。
以下是常见的部署环境选项:•云服务器:如阿里云、腾讯云等,提供高可用和可扩展的计算资源,适用于对资源要求不高的中小型巡查巡检系统。
巡检系统 可行性分析报告
巡检系统可行性分析报告1.引言巡检是指在工程、设备运行过程中定期或不定期对设备、工艺、工作环境等进行检查、监控和评估。
传统的巡检方式主要依靠人工,存在着效率低、成本高以及巡检结果缺乏准确性等问题。
为了解决这些问题,建立一个巡检系统具有重要意义。
本报告对巡检系统的可行性进行分析,为其开发和应用提供理论依据。
2.可行性分析2.1.技术可行性巡检系统的核心技术包括设备监控和数据分析。
目前,随着物联网技术的发展,设备监控技术已经相对成熟,可以实时采集设备的各项参数以及状态信息,并将其传输到中央服务器。
数据分析方面,随着机器学习和大数据分析技术的不断发展,可以对采集到的数据进行深度学习和模式识别,从而实现对设备的故障预测和异常检测。
综上所述,在技术层面上,巡检系统是可行的。
2.2.经济可行性经济可行性分析主要从成本和效益两个方面进行评估。
2.2.1.成本分析巡检系统的主要成本包括硬件设备、软件开发和维护成本。
在硬件设备方面,随着物联网硬件的普及和价格的下降,相对成本较低。
在软件开发方面,可以利用现有的开源系统和工具进行开发,降低开发成本。
维护成本主要包括巡检系统的更新和维护费用,相对较低。
综合考虑,巡检系统的成本是可以接受的。
2.2.2.效益分析巡检系统的主要效益包括提高巡检效率、减少人力成本和降低设备故障率等。
首先,巡检系统可以实现对设备状态的实时监控和检测,能够及时发现设备故障和异常情况,提高巡检效率。
其次,巡检系统减少了人工巡检的需求,节省了人力成本。
最后,通过巡检系统对设备进行故障预测和异常检测,可以及时采取措施避免设备故障,降低维修和更换成本。
综合考虑,巡检系统的效益是显著的。
2.3.组织可行性巡检系统需要得到组织的充分支持和配合,才能够顺利推进。
需要建立一个专门负责巡检系统的团队,负责系统的开发、运行和维护工作。
此外,还需要进行相关培训,提高员工的巡检系统运用能力。
目前,许多组织已经具备了开展巡检系统的条件和能力,因此,巡检系统在组织上是可行的。
设备巡检系统方案

设备巡检系统方案随着科技的不断进步和应用,许多企业和机构越来越重视设备的安全和稳定运行。
设备巡检是一项非常重要的工作,通过定期巡检设备,可以及时发现潜在的问题,并采取相应的措施解决,保障设备的正常运行。
为了提高设备巡检的效率和准确性,许多企业开始引入设备巡检系统。
本文将探讨设备巡检系统的方案。
一、设备巡检系统的基本原理设备巡检系统是通过物联网技术将巡检设备与数据采集主机连接起来,并通过云端平台进行数据存储和处理的一种系统。
在巡检过程中,巡检人员通过巡检设备获取设备的状态信息,并将这些信息上传到云端平台。
云端平台会对这些数据进行处理和分析,生成报告并提供给管理人员,帮助他们及时了解设备的运行状况和存在的问题。
二、设备巡检系统的组成要素1.巡检设备:巡检设备是设备巡检系统的核心组成部分,它通过传感器等技术采集设备的各项运行参数数据,并将这些数据传输给数据采集主机。
巡检设备需要具备稳定的数据采集能力以及与云端平台的连接能力。
2.数据采集主机:数据采集主机负责接收巡检设备传输的数据,并将数据上传至云端平台。
数据采集主机需要具备高效的数据处理和传输能力,能够快速准确地将数据发送给云端平台。
3.云端平台:云端平台是设备巡检系统的核心运行环境,它接收来自数据采集主机的数据,并对这些数据进行存储和处理。
云端平台需要具备大容量的数据存储和快速的数据处理能力,能够支持多用户的同时访问和数据交互。
4.管理终端:管理终端是设备巡检系统的用户界面,通过管理终端,管理人员可以查看设备的运行状态和巡检数据,生成巡检报告以及进行设备的远程控制和操作。
三、设备巡检系统的应用场景设备巡检系统的应用场景非常广泛,可以应用于各个行业的设备管理和运维中。
例如,制造业中的生产设备巡检,交通运输行业的交通设备巡检,能源行业中的发电设备巡检等。
设备巡检系统能够提高设备巡检的效率和准确性,降低人为的巡检失误和遗漏。
四、设备巡检系统的优势引入设备巡检系统具有以下几个优势:1.提高巡检效率:设备巡检系统可以实现自动化的数据采集和报告生成,减少了人工巡检的时间和精力消耗,提高了巡检的效率。
多路温度巡检仪工作原理

多路温度巡检仪工作原理
多路温度巡检仪主要是针对工业现场中的各种温度测量而设计的,是针对多点测温的需求而设计的。
在使用中可以灵活的使用,多个测温通道可同时测量一个或多个不同位置的温度值。
多路温度巡检仪具有多路热电偶测量功能,可以同时测量5个点的温度,每个热电偶都具有独立的编号和名称,便于对它们进行管理。
在一个巡检仪上可以实现4~20mA电流输出、键盘
输出、数字显示和打印输出。
巡检仪可通过RS232接口与计算
机相连,实现数据远传和控制管理等功能。
1.结构组成
多路温度巡检仪主要由热电偶温度传感器、多通道输入模块、按键与显示模块、继电器控制模块等部分组成。
2.工作原理
热电偶温度传感器在测温过程中,其测温范围一般为-55℃
~+500℃,其测温原理是通过热电阻将被测点与温度平衡后,
将热电偶插入测温管内,然后将被测点温度通过热电偶转换为电压信号并输出。
在接收到温度信号后,通过内部程序处理后,将显示到屏幕上。
—— 1 —1 —。
巡检管理系统技术方案
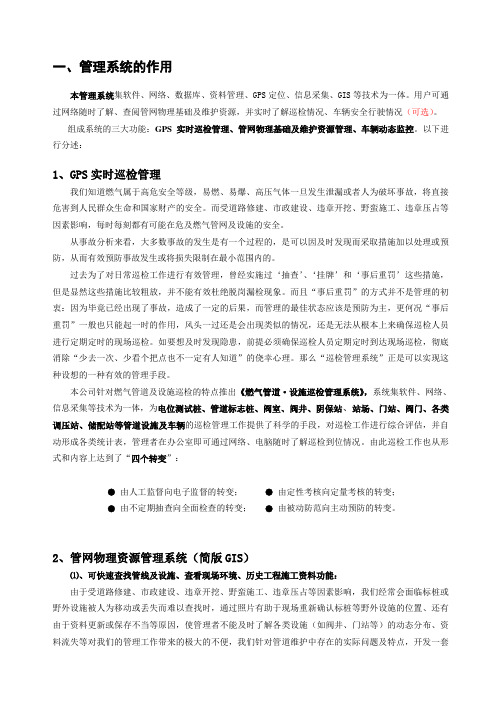
一、管理系统的作用本管理系统集软件、网络、数据库、资料管理、GPS定位、信息采集、GIS等技术为一体。
用户可通过网络随时了解、查阅管网物理基础及维护资源,并实时了解巡检情况、车辆安全行驶情况(可选)。
组成系统的三大功能:GPS实时巡检管理、管网物理基础及维护资源管理、车辆动态监控。
以下进行分述:1、GPS实时巡检管理我们知道燃气属于高危安全等级,易燃、易爆、高压气体一旦发生泄漏或者人为破坏事故,将直接危害到人民群众生命和国家财产的安全。
而受道路修建、市政建设、违章开挖、野蛮施工、违章压占等因素影响,每时每刻都有可能在危及燃气管网及设施的安全。
从事故分析来看,大多数事故的发生是有一个过程的,是可以因及时发现而采取措施加以处理或预防,从而有效预防事故发生或将损失限制在最小范围内的。
过去为了对日常巡检工作进行有效管理,曾经实施过‘抽查’、‘挂牌’和‘事后重罚’这些措施,但是显然这些措施比较粗放,并不能有效杜绝脱岗漏检现象。
而且“事后重罚”的方式并不是管理的初衷:因为毕竟已经出现了事故,造成了一定的后果,而管理的最佳状态应该是预防为主,更何况“事后重罚”一般也只能起一时的作用,风头一过还是会出现类似的情况,还是无法从根本上来确保巡检人员进行定期定时的现场巡检。
如要想及时发现隐患,前提必须确保巡检人员定期定时到达现场巡检,彻底消除“少去一次、少看个把点也不一定有人知道”的侥幸心理。
那么“巡检管理系统”正是可以实现这种设想的一种有效的管理手段。
本公司针对燃气管道及设施巡检的特点推出《燃气管道·设施巡检管理系统》,系统集软件、网络、信息采集等技术为一体,为电位测试桩、管道标志桩、阀室、阀井、阴保站、站场、门站、阀门、各类调压站、储配站等管道设施及车辆的巡检管理工作提供了科学的手段,对巡检工作进行综合评估,并自动形成各类统计表,管理者在办公室即可通过网络、电脑随时了解巡检到位情况。
由此巡检工作也从形式和内容上达到了“四个转变”:●由人工监督向电子监督的转变;●由定性考核向定量考核的转变;●由不定期抽查向全面检查的转变;●由被动防范向主动预防的转变。
巡检管理系统方案
以我给的标题写文档,最低1503字,要求以Markdown 文本格式输出,不要带图片,标题为:巡检管理系统方案# 巡检管理系统方案## 1. 引言巡检是指通过对设备、设施、场所等的定期巡查和检测,以发现问题、提前预警、及时修复和保养,确保设备正常运行,减少故障发生率。
传统的巡检工作通常采用纸质表格记录,存在信息不及时共享、数据处理繁琐等问题。
为了提高巡检工作效率和准确性,巡检管理系统应运而生。
本文档介绍了一套巡检管理系统的方案,旨在通过结合先进的技术手段,实现对巡检全流程的自动化管理,提升巡检工作效率和数据质量。
## 2. 系统需求基于对巡检工作流程的分析和用户需求的调研,以下是本巡检管理系统的主要需求:- **巡检计划管理**:管理员可以创建、编辑和下发巡检计划,指定巡检任务和时间安排。
- **巡检任务分配**:根据计划生成巡检任务,并分配给相应的巡检人员。
- **巡检数据采集**:巡检人员可以通过移动设备完成巡检任务,并实时采集巡检数据。
- **异常问题上报**:巡检人员可以在发现异常问题时进行上报,并记录问题的详细信息。
- **数据分析和报告生成**:系统可以对巡检数据进行分析和统计,并生成相应的报告,以供管理人员参考。
## 3. 系统架构本巡检管理系统采用三层架构,包括前端展示层、后端服务层和数据存储层。
### 3.1 前端展示层前端展示层主要包括巡检人员移动设备上的巡检应用和管理人员的Web管理界面。
巡检人员通过巡检应用完成巡检任务和数据采集,并可以上报异常问题。
管理人员通过Web界面进行巡检计划管理、任务分配和数据分析。
### 3.2 后端服务层后端服务层提供巡检管理系统的核心功能,包括用户认证、巡检计划管理、任务分配、数据采集和数据分析等。
服务层采用微服务架构,将不同的功能模块拆分成独立的服务,提高系统的可扩展性和灵活性。
### 3.3 数据存储层数据存储层采用关系型数据库,用于存储用户信息、巡检计划、巡检任务和巡检数据等。
工程巡检系统方案

工程巡检系统方案一、系统背景工程巡检是保障企业生产设备正常运行、确保生产安全及延长设备寿命的重要工作。
传统的巡检方式主要依靠人工巡检,存在着巡检效率低下、易出错和数据不可靠等问题。
因此,引入现代化、智能化的工程巡检系统,可以提高巡检效率、减少人力成本、提高数据的准确性和可靠性。
二、系统需求分析1.系统功能要求(1)设备信息管理:包括设备基本信息录入、更新、查询、删除等功能;(2)巡检任务管理:包括巡检计划制定、任务调度、执行情况监控等功能;(3)巡检数据采集:包括巡检点位数据采集、异常记录、图像存储等功能;(4)数据分析与报告:包括巡检数据分析、报告生成与导出等功能;(5)系统管理:包括用户管理、权限控制、日志记录等功能。
2.系统性能要求(1)稳定性:系统运行稳定,保证24小时不间断运行;(2)安全性:用户信息安全,数据保密性高;(3)可扩展性:系统具有良好的可扩展性,满足未来业务需求;(4)易用性:操作简单、用户体验好。
三、系统设计方案1.系统架构设计根据系统功能需求,采用B/S架构设计,即浏览器/服务器架构。
将系统分为前端界面、后端服务和数据库三层结构,实现对设备信息、巡检任务和数据的管理。
采用云端部署,实现分布式部署和统一管理。
2.系统模块设计(1)设备信息管理模块:对设备进行信息录入、更新、查询和删除等操作,包括设备编号、名称、型号、安装位置、生产厂家等信息的管理。
(2)巡检任务管理模块:对巡检任务进行制定、调度和监控管理。
支持周期性、临时性、计划性的巡检任务制定和执行。
(3)巡检数据采集模块:对巡检点位数据进行采集、记录并存储,包括文字描述、图片上传等功能,实现巡检数据的实时采集和存储。
(4)数据分析与报告模块:对巡检数据进行分析和报告生成,在系统中实现数据可视化和分析,提供用户定制化的报告输出。
(5)系统管理模块:对系统用户进行管理、权限控制、日志记录等操作,确保系统的安全性和稳定性。
工业设备状态监测与维护系统优化设计

工业设备状态监测与维护系统优化设计随着工业生产的高速发展,工业设备的状态监测和维护变得愈发重要。
传统的设备管理方式已经无法满足快速发展的工业需求,因此需要开发一种优化设计的监测与维护系统来提升设备效率以及减少故障率。
一、背景介绍传统的设备管理方式主要依赖于人工巡检、定期检修和排除故障。
然而,这种方式存在很多弊端,比如人工巡检不准确、周期性检修浪费资源、故障排除费时费力等。
而且,随着工业设备的复杂性增加,传统的管理方式已经不能满足对设备状态的全面监测和及时维护的需求。
二、系统需求分析为了优化设计监测与维护系统,我们需要满足以下几个方面的需求:1. 实时监测:系统应能够实时监测设备的状态,包括温度、压力、振动等指标,以便及时发现异常情况并采取相应措施。
2. 数据收集与分析:系统应能够自动采集设备相关的数据,并通过数据分析来推断设备的状态,提前预警潜在故障。
3. 故障诊断与预测:系统应能够对设备故障进行诊断,并能够根据设备的历史数据预测可能出现的故障。
4. 维护计划优化:系统应基于设备状态和故障预测结果,优化维护计划,将维护资源分配到最需要的设备上,以减少维护成本和设备停机时间。
5. 用户界面友好:系统应具备直观易懂的用户界面,使用户能够方便地查看设备状态和维护计划,并进行相应的操作。
三、系统架构设计基于上述需求,我们可以设计以下的系统架构:1. 数据采集层:通过传感器等设备实时采集设备的工作状态数据,包括温度、压力、振动等指标,并发送至系统的数据处理层。
2. 数据处理层:接收来自数据采集层的数据,并进行实时数据处理、故障预测和维护计划优化等任务。
3. 用户界面层:为用户提供友好的界面,使其能够方便地查看设备状态和维护计划,并进行相应操作。
四、关键技术应用为了实现系统的优化设计,我们需要运用以下关键技术:1. 大数据分析:通过大数据分析技术,处理海量的设备状态数据,从中挖掘出设备状态的规律和异常情况,为故障预测和维护计划优化提供依据。
多路温度巡检系统的设计与应用

文章编号 :0 19 4 (0 80 ・0 30 10 .9 42 0 )90 1 —3
多路 温 度 巡 检 系统 的设 计 与应
宋 丹
( 中国 电 子科 技 集 团 四十 六 所 , 津 3 0 9 ) 天 0 1 2
摘 要 : 工业 自动 控 制 领 域 , 温 度 的 控 制是 很 重要 的一 个 方 面 。本 设 计 是 一 种7 温度 巡 在 对 路
检 系统 。 硬 件 上 , 温度 检 测元 件 采 用 单 总 线 方 式 下 先 进 的 数 字 式 温 度 传 感 器 , 电路 结 构 大
为 简化 。软 件 上 , 汇 编语 言 对 单 片机 编程 以 实 现 对 各 测 试 点 温 度 值 的 检 测 和 集 中管 理 , 用
并 且 通 过 软件 编程 以极 少量 的 按 键 实 现 了对仪 表 的方 便 操 作 。
口方 式 , S 8 2 D 1 B 0在 与微 处 理器 连 接 时仅 需要 一 条 口线 即 可 实 现 微 处 理 器 与 D 1 B 0的 双 向 通 讯 ; S82
对 采集 数据 进 行 保 存 , 用 T 9 3 采 6 6 C液 晶控 制 器 进 行 温 度 显 示 ,并 通 过 自定 义 的键 盘 对 本 系统 进 行
控 制
D 1B 0支 持 多点组 网功能 . S8 2 多个 D 1B 0可 以并 S8 2 联 在 唯一 的三线 上 , 现组 网多 点测 温 ; S 8 2 实 D 1 B 0在 使 用 中不需 要任 何外 围元 件 .全部传 感元 件及转 换 电路集 成 在形 如一 只三极 管 的集成 电路 内 ;温度 范
Ke wor s:e p r tr p to i pe to AT8 y d tm e au e ar l ns c in; 9C51; DS1 B2 8 0
点巡检系统方案

点巡检系统方案一、引言在工业生产中,对于设备的正常运行和安全性的保障十分重要。
因此,建立一个高效、准确的点巡检系统成为许多企业的需求。
本文将提出一个点巡检系统的方案,旨在提高设备巡检的效率和精确度,确保设备的稳定运行和及时维护。
二、系统介绍点巡检系统是一种通过移动终端设备进行设备巡检的自动化管理系统。
它利用先进的技术手段,如物联网、云计算和大数据分析等,实现对设备的远程监控、数据采集和异常预警等功能。
三、系统架构点巡检系统采用客户端/服务器模式架构,包括以下几个核心组件:1. 客户端应用:该应用安装在移动终端上,提供用户登录、巡检任务管理、数据采集、异常报警等功能。
2. 服务器端应用:承担用户数据管理、监控数据存储、异常分析、任务调度等核心功能,提供数据库和Web服务接口。
3. 数据库:用于存储设备信息、巡检记录、异常数据等。
四、系统特点1. 移动化:点巡检系统基于移动终端平台,实现了设备巡检的移动化,巡检员可以随时随地进行巡检任务,减少了时间和空间上的限制。
2. 实时监控:系统可以实时监控设备的运行状态,通过传感器数据的采集和传输,实现对设备的远程监控,及时掌握设备工作情况。
3. 数据分析:系统利用大数据分析技术,对设备的巡检数据进行分析和挖掘,发现异常情况并进行预警,提高故障的预防和处理效率。
4. 任务调度:系统根据设备巡检计划和优先级,进行巡检任务的调度和分配,保证巡检工作的有序进行。
5. 灵活配置:系统支持用户对设备信息、巡检计划、异常规则等进行灵活配置,满足不同场景下的巡检需求。
6. 可视化展示:系统提供直观的数据展示和统计功能,通过图表和报表的形式呈现设备巡检情况,帮助管理者全面了解设备运行状况。
五、系统实施步骤1. 确定需求:根据企业的实际情况,明确点巡检系统的应用范围和目标,明确所需功能和性能指标。
2. 系统设计:根据需求,进行系统的整体设计和详细设计,包括系统架构、功能模块、数据流程等。
多路温度巡检仪-设计说明书

来更具有灵活性。
6.
冻结功能:在不需要系统自动巡回检测时,系统就能够定格并且
持续工作在某一种状态下。因此这就需要所谓的冻结功能。在我
们不需要系统工作在自动状态下时,可以通过输入一个开关量,
是系统“冻结”住,从而工作在某一特定的状态下。
可通过按钮开关操控作冻结或切换显示,在单片机实验板台上模拟调试实现。
基本思想:
本次的设计课题是:多路温度巡检仪。课题的基本思想是以简单的微控制
器为核心,以温度传感器(测温范围为: -50℃-+50℃)为基础,通过信号 -电
压变化器,将温度传感器采集到的温度信号转换成可供 A/D转换器转换的 0~5
清零。
12.键盘扫描及参数设定:此分流程主要是检测键盘是否有动作,如果有动作
就将检测到的按键号存储起来,供参数设定使用。参数设定主要是对节拍控
9.
无操作超时返回:如果系统工作在其他功能状态下,而又没有人
员进行操作,这是就需要工作状态被切换到正常的巡回检测状态。
使系统返回到正常的工作状态
10.
实时钟显示及设定:为了丰富系统的功能和增加系统的实用性,
可以在巡回检测的过程中穿插一个实时钟显示,这样可以另系统
在实际应用当中更具人性化,更接近实际应用场合。
V模拟电压,而且可以实现多路温度的采集和变换。经过信号 -电压变换器输出
的0~5 V电压再经过 A/D转换器转换成一个八位的数字量(采集多路温度时,
某一时刻只能有一路被进行转换),然后利用微控制器将这八位数字量进行读
取,再经过一定的数字滤波和软件算法,最终以一定的显示格式在八位数码管
工业无人机智能巡检系统设计与优化
工业无人机智能巡检系统设计与优化工业无人机在巡检领域的应用已经越来越广泛,它能够准确、高效地完成工业设备的巡视任务,使得巡检工作更加安全、快捷、精确。
为了优化工业无人机智能巡检系统的设计,提高巡检效率和准确率,本文将探讨工业无人机智能巡检系统的设计原理和优化方法。
一、工业无人机智能巡检系统的设计原理工业无人机智能巡检系统的设计原理是基于先进的机器视觉、人工智能和无线通信技术。
主要包括以下几个方面:传感器技术、图像识别和处理技术、路径规划和避障技术、无线通信和数据传输技术等。
1. 传感器技术工业无人机智能巡检系统需要搭载各种传感器来获取周围环境和设备信息。
常见的传感器包括摄像头、红外线传感器、激光雷达等。
这些传感器能够实时感知设备的状态和周围的环境,为后续的图像识别和路径规划提供准确的数据支持。
2. 图像识别和处理技术工业无人机智能巡检系统通过图像识别和处理技术对设备进行检测和分析。
它可以将拍摄到的设备图像进行特征提取、物体识别和故障判断等。
通过人工智能算法,系统可以判断设备的工作状态是否正常,进一步提高巡检效率和准确率。
3. 路径规划和避障技术路径规划和避障技术是工业无人机智能巡检系统中的关键技术之一。
通过地图导航和避障算法,系统能够自动规划最优路径和避开障碍物,保证无人机在巡检过程中的安全和准确性。
4. 无线通信和数据传输技术工业无人机智能巡检系统需要与数据中心进行实时通信和数据传输。
通过无线通信技术,系统可以将巡检过程中收集到的数据传输到数据中心,实现远程监控和数据分析。
同时,无人机也可以接收指令,根据操作人员的要求进行控制和调整。
二、工业无人机智能巡检系统的优化方法为了提高工业无人机智能巡检系统的性能和效率,可以从以下几个方面进行优化:图像处理算法优化、路径规划算法优化、传感器选择和布局优化、通信和数据传输优化。
1. 图像处理算法优化图像处理算法是工业无人机智能巡检系统的核心。
优化图像处理算法可以使得无人机更快地对设备异常进行识别和判断。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
;............................................;河北科技大学自动化生产实习程序;.多路工业过程参数巡检系统的设计;同志们!考研去吧!哈哈~~~;作者:燃烧的水;QQ1126739610 ;............................................;接口定义LED BIT P1.4;系统指示灯低电平灯亮H_EN BIT P2.2T_EN BIT P2.1G_EN BIT P2.0KEYSET BIT P1.0;设定按键KEYUP BIT P1.1;加按键KEYDOWN BIT P1.2;减按键KEYOK BIT P1.3;确定按键CLK0809BIT P3.4;ADC0809的时钟引脚,用定时器T0驱动LED_FLAG BIT P1.5;数据定义H_STOR EQU30HT_STOR EQU31HG_STOR EQU32HDATA_SAM EQU33H;采集的数据ALARM_H EQU34H;报警上限,初始化为170ALARM_L EQU35H;报警下限,初始化为150FLAGSET EQU39HDISP_NUM EQU3AH;初始化中断地址ORG0000H;程序入口LJMP STARTORG000BHLJMP INT_T0;定时中断0ORG0013HLJMP INT_1;外部中断1ORG001BH;定时器T1程序入口LJMP INT_T1 ;...............................................;初始化ORG0050HSTART:LCALL DELAY1S;上电延时;定时器0MOV TMOD,#12H;,T0方式2MOV TL0,#0A0H;2590HZMOV TH0,#0A0H;MOV TH1,#00HMOV TL1,#00HSETB ET1SETB ET0SETB EASETB TR0SETB TR1;外中断1SETB IT1;;下降沿方式SETB EX1MOV SP,#5FH;设置堆栈指针CLR LED;系统指示灯亮LCALL DELAY1SSETB LEDMOV ALARM_H,#170;初始化为170MOV ALARM_L,#150;初始化为150MOV FLAGSET,#00 ;................................................;主函数MAIN:LCALL PROSAMDATA;采集数据处理LCALL DISP;数字显示LCALL ALARM;报警显示LCALL KEYHANJMP MAIN ;........................................;显示子程序; ;.......................................TAB:DB0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H;不带小数点数组TABXS:DB40H,79H,24H,30H,19H,12H,02H,78H,00H,10H,08H;带小数点数组DISP:SETB H_ENSETB T_ENMOV A,H_STORMOV DPTR,#TABXSMOVC A,@A+DPTRSETB G_ENMOV P0,ACLR H_ENLCALL DELAY1MSLCALL DELAY1MSLCALL DELAY1MSSETB T_ENSETB G_ENMOV A,T_STORMOV DPTR,#TABMOVC A,@A+DPTRSETB H_ENMOV P0,ACLR T_ENLCALL DELAY1MSLCALL DELAY1MSSETB H_ENSETB G_ENMOV A,G_STORMOV DPTR,#TABMOVC A,@A+DPTRSETB T_ENMOV P0,ACLR G_ENRET ;....................................;报警指示子程序;................................... ALARM:MOV A,DATA_SAMCLR CSUBB A,ALARM_HJNC QUITA2CLR CMOV A,DATA_SAMSUBB A,ALARM_LJC QUITA2 ALARMLED:SETB LEDAJMP QOUT1 QUITA2:CLR LEDQOUT1:RET;................................;中断T0子程序,判断按键到时退出;..............................INT_T0:CPL CLK0809RETI ;.................................;中断T1子程序控制ADC0809的转换周期;...................................INT_T1:PUSH PSWPUSH AMOV TH1,#00HMOV TL1,#00HCPL EX1MOV DPTR,#7FF8HMOV A,#00HMOVX@DPTR,APOP APOP PSW ;...................................;外部中断1程序,ADC0809转换完毕进入中断;.....................................INT_1:CLR EX1PUSH PSWPUSH AMOV DPTR,#7FF8HNOPNOPMOVX A,@DPTR;读结果NOPNOPMOV DATA_SAM,A;存结果NOPNOPPOP APOP PSWSETB EX1RETI ;.......................................;采集数据处理子程序,DATASAM;出口:100/255;....................................PROSAMDATA:MOV A,FLAGSETCLR CSUBB A,#02JZ ALARMHHMOV A,FLAGSETCLR CSUBB A,#01JZ ALARMLLAJMP ALARM00ALARMHH:MOV A,ALARM_HAJMP CHULIALARMLL:MOV A,ALARM_LAJMP CHULIALARM00:MOV A,DATA_SAMCHULI:MOV B,#51DIV ABMOV H_STOR,AMOV A,BMOV B,#02MUL ABMOV B,#10DIV ABMOV T_STOR,AMOV G_STOR,BLCALL DISPRET;;;;;;;;;;10ms延时程序;;;;;;;;;;DELAY10MS:MOV R6,#20D1:MOV R7,#248DJNZ R7,$DJNZ R6,D1RET ;,................................;延时1秒子程序;........................DELAY1S:MOV R7,#3 LOOP3:MOV R6,#200 LOOP2:MOV R5,#254 LOOP1:DJNZ R5,LOOP1DJNZ R6,LOOP2DJNZ R7,LOOP3RET ;....................................;延时1ms ;..................................... DELAY1MS:MOV R7,#02H DL:MOV R6,#0FFHDJNZ R6,$DJNZ R7,DLRET ;.....................................;矩阵键盘子程序;.................................... QOUT:SETB KEYUPSETB KEYSETCLR KEYDOWNCLR KEYOKLCALL DELAY1MSLCALL DELAY1MSJNB KEYUP,$JNB KEYSET,$LCALL DELAY1MSRET KEYHAN:LCALL DELAY1MSLCALL DELAY1MSLCALL DELAY1MSCLR KEYOKCLR KEYDOWNSETB KEYUPSETB KEYSETJNB KEYSET,KACJNB KEYUP,KBDLJMP QOUTKAC:SETB KEYOKLCALL DELAY1MSLCALL DELAY1MSLCALL DELAY1MSLCALL DELAY1MSLCALL DELAY1MSJNB KEYSET,KEY_DOWN KEY_SET:INC FLAGSETMOV A,FLAGSETCLR CSUBB A,#3JNZ QOUTMOV FLAGSET,#01HLJMP QOUTKEY_DOWN:MOV A,FLAGSETSUBB A,#01HJZ NEXT22NEXT11:MOV A,ALARM_HLJMP NEXT55NEXT22:MOV A,ALARM_LNEXT33:CLR CSUBB A,#5MOV B,ACLR CSUBB A,#10JC NEXT44MOV ALARM_L,BLJMP QOUTNEXT44:MOV ALARM_L,#10LJMP QOUTNEXT55:SUBB A,#5MOV B,ACLR CSUBB A,#50JC NEXT66MOV ALARM_H,BLJMP QOUTNEXT66:MOV ALARM_H,#50LJMP QOUTKBD:SETB KEYOKLCALL DELAY1MSLCALL DELAY1MSLCALL DELAY1MSLCALL DELAY1MSLCALL DELAY1MSLCALL DELAY1MSJB KEYUP,KEY_UPKEY_OK:MOV A,#00HMOV FLAGSET,ALJMP QOUTKEY_UP:MOV A,FLAGSETSUBB A,#01HJZ NEXT2NEXT1:MOV A,ALARM_HLJMP NEXT5NEXT2:MOV A,ALARM_LNEXT3:ADD A,#5MOV B,ACLR CSUBB A,#200JNC NEXT4MOV ALARM_L,BLJMP QOUTNEXT4:MOV ALARM_L,#200LJMP QOUTNEXT5:ADD A,#5MOV B,ACLR CSUBB A,#250JNC NEXT6MOV ALARM_H,BLJMP QOUTNEXT6:MOV ALARM_H,#250RET END。