第四届创意赛 BIGBEE技术报告
编码器测速原理讲解
第四届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告附件B 起跑线识别算法的研究[注]学校:西北师范大学队伍名称:瞬之队参赛队员:陈有生孙越汪国强带队教师:摆玉龙严春满关于技术报告和研究论文使用授权说明本人完全了解第四届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:目 录创新点 (1)第一章引言 (2)1.1 Freescale车模比赛简介 (2)1.2 发展现状 (3)1.3 章节安排 (3)第二章系统整体框架 (5)2.1 系统框架 (5)2.1.0 主要模块 (5)2.1.1 工作过程 (6)2.2 系统软件 (6)2.3 方案简介 (7)第三章机械结构与调整 (8)3.1 机械机构的安装 (8)3.1.1 舵机的安装 (9)3.1.2 光电编码器的安装 (9)3.1.3 系统版的安装 (10)3.1.4 总体布局 (10)3.2 机械调整 (11)3.2.1 主销内倾 (11)3.2.2 主销后倾 (11)3.2.3 前轮外倾角 (12)3.2.4 前后轮前束 (12)3.3.5 车体重心 (12)第四章硬件电路的设计与实现 (13)4.1最小系统板的设计 (13)4.2 电源模块 (14)4.3电机驱动模块 (16)4.4摄像头 (19)4.5速度传感器 (20)4.6串口和模式选择 (21)第五章软件系统设计与实现 (22)5.1 HSC12控制软件主要理论 (22)5.2 软件各功能模块设计 (22)5.2.1 时钟模块 (22)5.2.2 PWM输出模块 (22)5.2.3 ECT模块 (22)5.3 图像采集 (25)5.4 图像处理 (27)5.4.1 二值化算法 (27)5.4.2 黑线提取流程 (28)5.5 控制算法 (30)5.5.1 PID简介 (30)5.5.2 模拟PID与数字PID (30)5.5.3 PID控制原理 (31)5.5.4 位置式PID与增量式PID (32)5.5.5 PID各环节作用 (32)5.6 路径识别 (34)5.7 舵机控制 (34)5.8 电机控制 (35)第六章开发工具及调试 (37)6.1 上位开发工具 (37)6.2 串口调试工具 (38)6.3 车模技术参数表格 (39)结论 (40)致谢 (41)参考文献 (41)附录A (42)附录B (68)竞速车模的电子控制系统设计:本文详细介绍了以第四届全国飞思卡尔智能车大赛为背景的竞速车模自摘要:动循线控制系统方案。
第四届创意赛 BIGBEE技术报告

在攀越障碍功能设计实现时,考虑过两种方案。 1、利用轮胎与地面摩擦力,强行驶上台阶。
如上图所示为美军“Crusher”战车驶上障碍的示意图。但方案由于需要巨大的 摩擦力做驱动,要求较大的车辆整体重量(“Crusher”重达 4 吨)稳定性得不到保证。
2、考虑在轮毂与围内向 上抬升,这样就可利用摇臂转动时的力矩提供垂向力
第四届全国大学生“飞思卡尔”杯 智能汽车竞赛
技术报告
学 校: 队伍名称: 参赛队员:
带队教师:
同济大学
BigBee 陈晓辰 肖恺 胡凤鉴 朱捷 谢乐寅 罗峰
曹静
关于技术报告和研究论文使用授权的说明
本人完全了解第四届全国大学生“飞思卡尔”杯智能汽车竞赛关保留、使用技 术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思 卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及 参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
3.3 ZigBee
3.3.1 ZigBee 协议简介
ZigBee 技术作为一种新兴的低速率短距离无线通讯技术,也是 ZigBee 联盟 (ZigBee Alliance)所主导的无线传感器网络技术标准。完整的 ZigBee 协议栈由物 理层,MAC 子层,网络层,应用层,应用汇聚子层和高层应用规范层组成。ZigBee 并不是完全独有的全新的标准,它的物理层和 MAC 子层采用了 IE802.15.4 标准, 而且有关频带和速率方面的参数也是 IE802.15.4 标准一样。
在接下来的技术报告中,主要从机械,电路,算法三方面对本队的技术方案作 较为具体的介绍。首先在第二章中介绍本创意小车的机械部分,然后在第三章介绍 本创意车用到的电方案,第四章电路设计和第五章控制算法中对本方案的各个细节 进行介绍。
竞在北邮
竞在北邮 编委会成员:廖宝华王聪欧云杰参与作者(按出现顺序)吴云峰,田玉龙,韦穆华,李岩,赵艳,刘翰林,杨坚,张迅,张园,路尧,黄兰,王飞,聂蔚青,孙羽经,陈琳颖,陈阳,秦浩浩,申静,杨新星,杨桅,石明洋,许奥林,杨铭,王聪,葛雨明,汪启扉,李声韧,黄海斌,扬阳特别感谢林金桐校长,蔺志青副院长,王生卫副书记,贺祖国老师,辅导员廉洁。
2007年8月序刚迈进大学校门的那一刻,我们心中充满迷茫,庆幸的是,在人生道路上有几个贵人相助,是他们让我们的整个大学生活有了质的变化。
回忆大学三年,我们几个人都参加了好几种竞赛,收获颇多。
曾经有个师兄跟我们说过,大学里面最能锻炼人的就是大作业和竞赛。
的确,竞赛是一种技能的体现,它以自身的魅力影响着我们的人生。
很多大一大二的同学对竞赛有一种恐惧感,认为竞赛是牛人做的事。
其实不是的,牛人也是人,也是从普通人成长起来的,牛人与非牛人的区别仅仅在于牛人去做了,而非牛人不敢跨出尝试的第一步。
我们希望通过本书能给学弟学妹们一定的启发,更重要是能激发同学们对竞赛的勇气。
当你认真走完那条竞赛之路后你会发现,其实竞赛很简单,并且会发现自己的大学生活变得更加丰富,更加精彩!所以,希望大家相信自己!勇敢的去拼搏,你会收获很多,你的生活会丰富很多。
这本书由很多参加各项竞赛的兄弟姐妹完成,参与这本书的同学都用心地体验了各种竞赛,并取得了一定的成绩。
最重要的是他们留给学弟学妹们的话都是真心的!各兄弟姐妹成果累累,出于某些原因,他们经验分享后面只是列出他们部分成绩,并不完整,希望大家不要见怪。
本书的完成,要感谢各位提供经验之谈的作者,感谢他们为北邮竞赛所做的贡献,是他们让北邮竞赛更成熟,更辉煌;感谢各个竞赛的指导老师,感谢他们为北邮竞赛提供的热心指导;同时感谢刘翰林、熊文钦、陆晓虎等同学在本书制作过程中提供的热心帮助和支持;最后,特别感谢林金桐校长,电信工程学院蔺志青副院长,王生卫书记,辅导员廉洁老师以及关心支持此书的学校领导,感谢他们给予的热心帮助和鼓励。
4.增材制造项目(世赛选拔新增项目)技术文件 第一届全国技能大赛山东省选拔赛

增材制造项目技术文件第一届全国技能大赛山东省选拔赛目录1.项目介绍...................................................................................................................... - 1 -1.1 项目描述............................................................................................................. - 1 - 1.2选手参赛条件...................................................................................................... - 1 -1.3 考核标准............................................................................................................. - 2 -1.4 选手应具备的能力............................................................................................. - 4 -2.竞赛项目...................................................................................................................... - 7 -2.1 竞赛内容............................................................................................................. - 7 -2.2 竞赛时间安排..................................................................................................... - 9 -3.评判标准........................................................................................................................ - 9 -3.1 分数和成绩计算方法......................................................................................... - 9 -3.2 评分标准........................................................................................................... - 10 -3.3 客观和主观评分............................................................................................... - 10 -3.4 裁判员组成和分工........................................................................................... - 11 -4.竞赛相关设施设备...................................................................................................... - 13 -4.1 竞赛设施设备和工具....................................................................................... - 13 -4.2 选手自带物品................................................................................................... - 14 -5.项目特别规定............................................................................................................ - 15 -5.1 赛前................................................................................................................... - 15 -5.2 赛中................................................................................................................... - 16 -5.3 违规情形........................................................................................................... - 16 -6.健康、安全和环保要求............................................................................................ - 17 -6.1 比赛环境........................................................................................................... - 17 -6.2 安全教育........................................................................................................... - 18 -6.3 环境保护........................................................................................................... - 18 -第一届全国技能大赛山东省选拔赛组委会2020 年 8 月本项目技术工作文件(技术描述)是对本竞赛项目内容的框架性描述,正式比赛内容及要求以竞赛最终公布的赛题为准。
飞思卡尔杯全国大学生智能汽车邀请赛北理风行者车队技术报告
速度检测模块由 S12 的增强型捕捉计数模块、传感器和外围电路组成,通过 检测赛车的实时车速为赛车的车速控制提供控制量。
2.3 智能车系统软件结构设计
如果说系统硬件对于智能车来说是它的骨架和躯体,那么软件算法就是它的 思想。软件算法的优劣直接体现了智能车辆的“智能”高低。所以软件系统对于智 能车来说至关重要。 首先,赛车系统通过路径识别模块获取前方黑色引导线的信息, 同时通过速度检测模块实时获取赛车的速度。 利用连续路径识别算法求得赛车与黑 线位置的偏差,接着采用 P 方法对舵机进行控制,根据检测到的实时车速,结合模 糊控制策略对赛车速度进行恰当的控制调整,使赛车在符合比赛规则情况下沿赛道
50cm 316mm 172m 18/76
图 3.1 模型车的底盘结构
3.2 智能车运动学状态方程
在只考虑车辆的平面运动情况下,当转向时,车辆只做平面运动及平面旋转 运动,如图 3.2、3.3 所示。
Vf Vr
w
L
图 3.2 小车转向示意图
R
L
图 3.3 转向平面图
2 w
Vr
由角速度的定义可知
TR
以智能汽车为研究背景的科技创意性制作,是一种具有探索性的工程实践活 动,其本质也是人类创造有用人工物的一种训练性实践,其过程属性是综合,而结 果属性很可能是创造。通过竞赛,参赛的同学们培养了对已学过的基础与专业理论 知识与实验的综合运用的能力;带着背景对象中的各种新问题,学习控制、模式识 别、传感技术、电子、电气、计算机、机械等多个学科新知识,包括来自不同学科 背景大学生的相互学习,逐渐学会了在学科交叉、集成基础上的综合运用;若是以 实用为目的,还必须考虑考虑可靠性、寿命、外观工业设计、集成科学与非科学, 在具体约束条件下融合形成整体的综合运用。这样的训练是很有意义的。
你好 机器人
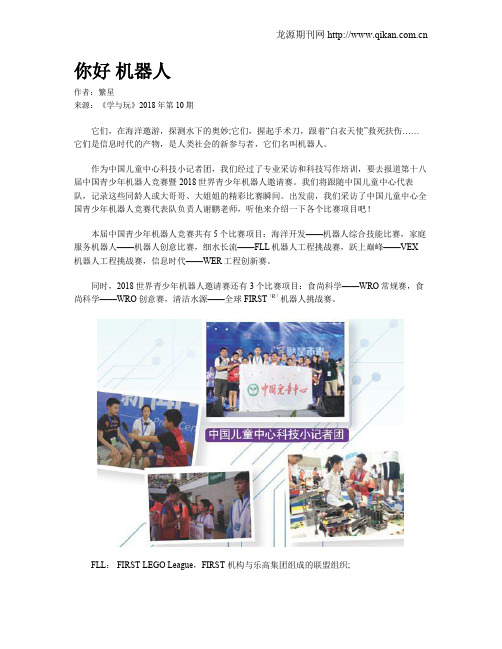
你好机器人作者:繁星来源:《学与玩》2018年第10期它们,在海洋邀游,探测水下的奥妙;它们,握起手术刀,跟着“白衣天使”救死扶伤……它们是信息时代的产物,是人类社会的新参与者,它们名叫机器人。
作为中国儿童中心科技小记者团,我们经过了专业采访和科技写作培训,要去报道第十八届中国青少年机器人竞赛暨2018世界青少年机器人邀请赛。
我们将跟随中国儿童中心代表队,记录这些同龄人或大哥哥、大姐姐的精彩比赛瞬间。
出发前,我们采访了中国儿童中心全国青少年机器人竞赛代表队负责人谢鹏老师,听他来介绍一下各个比赛项目吧!本届中国青少年机器人竞赛共有5个比赛项目:海洋开发——机器人综合技能比赛,家庭服务机器人——机器人创意比赛,细水长流——FLL机器人工程挑战赛,跃上巅峰——VEX 机器人工程挑战赛,信息时代——WER工程创新赛。
同时,2018世界青少年机器人邀请赛还有3个比赛项目:食尚科学——WRO常规赛,食尚科学——WRO创意赛,清洁水源——全球FIRST(R)机器人挑战赛。
FLL: FIRST LEGO League,FIRST 机构与乐高集团组成的联盟组织;VEX: VEX Robotics Competition,VEX 机器人世界锦标赛;WER: World Educational Robot Contest .世界教育机器人大赛;WRO: World Robot Olympiad,国际奥林匹克机器人大赛。
这是一项自由度超高的竞赛,每年设置一个主题,今年的主题是“食尚科学”。
是的,你没看错,此“食尚”非彼“时尚”。
让我们聚焦粮食危机,展示自己的创意,消除饥饿,实现粮食安全。
选手闪亮登场中国儿童中心创意赛小学组任奕丞,北京市太平路小学谷朴,北京第二实验小学小选手告诉我(高峰源)这个机器人让粮食运输聪明起来。
通过分类,最好的种子用来再次播种;第二档的进入超市;差点的进入畜牧场给动物提供饲料;最差的运往化工厂转化为生物能源。
中国机器人大赛Robocup 技术报告(竞速、体操、舞蹈)

中国机器人大赛暨国际公开赛机器人搬运工程技术报告参赛学校:队伍名称:参赛队员:带队教师:关于技术报告使用授权的说明本人完全了解中国机器人大赛暨国际公开赛关于保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人和比赛组委会共同所有,比赛组委会可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛机器人的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:引言机器人硬件加工制作的前提是三维软件Solidworks的动作模拟,身体主结构采用金属结构,即铝板加工制成;自由度之间的链接块和脚板则采用了聚氯乙烯即pvc板制成,降低机器人的重量,因此完成期望动作的可行性和稳定性较高。
全部机械结构由我们自主加工完成。
机器人是自动控制机器(Robot)的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械。
体操机器人具有明显的类人特征,具有可独立运行的双臂和双腿,其中手臂部分具有不少于1个自由度,双腿部分具有不少于3个自由度。
可实现双手俯卧撑,倒立劈叉,左、右单手俯卧撑,左、右侧翻360°,前、后滚翻360°等较为复杂的体操动作,是研究仿人形机器人的基础。
本组作品是用于机器人竞技的竞技体操机器人,关于机器人的机械机构的设计,控制系统的设计,程序的编写,动作的调试等,均是本组机器人的研究内容。
本组竞技体操机器人由我们设计和制作,该机器人有10个自由度,采用AX-12系列舵机;在脉宽调制(PWM)控制伺服电机的方法基础上,ATmega16单片机通过定时器设定脉冲宽度,达到对伺服电机的角度控制。
关键词:舵机;单片机;机械加工;PWMABSTRACTPremise of the robot hardware manufacture is the three-dimensional simulation software Solidworks which can simulate the action. The main structure of the robot uses metal structure, which is made of aluminum processing; the link blocks between freedom and the footplate use PVC board that is made of polyvinyl chloride, reducing the weight of the robot, so expect to complete the feasibility and stability of the higher action. All the mechanical structure processing is done by our own. Robot is automatic control machine (Robot) commonly known. Automatic control machines include any simulating human behavior or thoughts and emulating other biological machinery. Gymnastics robot has obvious humanoid characteristics, having operate independently of the arms and legs, in which arm section having at least one degree of freedom, legs portion having at least three degrees of freedom. Enabling hands push-ups, inverted splits, left and right-handed push-ups, left and right turn 360°, before and after the roll 360°and other more complicated gymnastics. Those are basic research of humanoid robot. Our works is a competitive athletic gymnastics robot for robot-sports. On the robot mechanical system design, control system design, programming, and actions commissioning and other, are the research contents. The competitive gymnastics robot’s design and production are by ourselves. The robot has 10 degrees of freedom, uses the AX-12 series servo. We use aluminum parts to connect the servo motor and reduce the weight of the robot, so expect to complete the feasibility and stability of the higher action.Key words: Servo motor; Microcontroller; Mechanical processing; PWM目录1 系统整体设计 (1)1.1 体操机器人简介 (1)1.2 设计与制作 (1)1.2.1 前期设计 (2)1.2.2 动作调试 (2)1.2.3 程序下载 (2)1.2.4 后期维护与外形设计 (2)2 硬件设计 (3)2.1 机械部分设计 (3)2.2 电控部分设计 (3)2.2.1控制系统设计 (4)2.2.2电源设计 (4)2.2.3舵机设计 (4)3 软件设计 (16)3.1 指令设置和范例 (16)3.2 附件 (19)4 系统开发与调试 (21)4.1 动作调试 (21)4.2 程序设计 (21)5 结论 (34)参考文献 (36)致谢 (37)附录 (38)1 系统整体设计1.1体操机器人简介机器人是自动控制机器(Robot)的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等)。
2015年度天津财经大学大学生创新创业训练项目立项名单
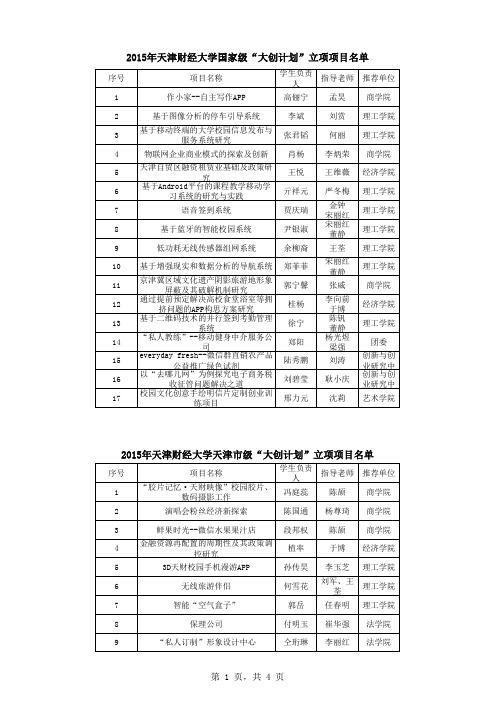
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 项目名称 作小家--自主写作APP 基于图像分析的停车引导系统 基于移动终端的大学校园信息发布与 服务系统研究 物联网企业商业模式的探索及创新 天津自贸区融资租赁业基础及政策研 究 基于Android平台的课程教学移动学 习系统的研究与实践 语音签到系统 基于蓝牙的智能校园系统 低功耗无线传感器组网系统 基于增强现实和数据分析的导航系统 京津冀区域文化遗产阴影旅游地形象 屏蔽及其破解机制研究 通过提前预定解决高校食堂浴室等拥 挤问题的APP构思方案研究 基于二维码技术的并行签到考勤管理 系统 “私人教练”--移动健身中介服务公 司 everyday fresh--微信群直销农产品 公益推广绿色试剂 以“去哪儿网”为例探究电子商务税 收征管问题解决之道 校园文化创意手绘明信片定制创业训 练项目 学生负责人 指导老师 推荐单位 高俪宁 李斌 张君韬 肖杨 王悦 亓祥元 贾庆瑞 尹银淑 余柳裔 郑菲菲 郭宁馨 桂杨 徐宁 郑阳 陆秀鹏 刘碧莹 邢力元 孟昊 刘赏 何丽 李炳荣 王维薇 严冬梅 金钟 宋丽红 宋丽红 董静 王荃 宋丽红 董静 张威 李向前 于博 陈钒 董静 杨光煜 梁强 刘涛 耿小庆 沈莉 商学院 理工学院 理工学院 商学院 经济学院 理工学院 理工学院 理工学院 理工学院 理工学院 商学院 经济学院 理工学院 团委 创新与创 业研究中 创新与创 业研究中 艺术学院
团委 团委
汪洋 曾欣、王 启超 赵冰 卢绯
团委 团委 团委 团委 团委 团委 团委 业研究中 创新与创 业研究中
第 4 页,共 4 页
孟喆 王艺 刘天泉 杨帅 牟婧瑶 席苏梅 梁何 刘扬 王可 夏秋玥 邱阿丽 郭燕红 王孜婵 陈若瑄 孔令仁 马钰昕 孙颖 杨晓帆 解艳玲 尚姝圻 蔡世盼 孔昕
RoboMaster 机甲大师赛规则说明书
2 © 2023 大疆创新 版权所有声明参赛人员不得从事或参与任何经RoboMaster 组委会认定的涉嫌公众争端、敏感议题、冒犯大众或某些大众群体或其它破坏RoboMaster 形象的行为,否则,组委会有权永久取消违规人员的比赛资格。
阅读提示符号说明禁止重要注意事项操作、使用提示词汇解释、参考信息修改日志日期版本 修改记录 2023.04.16V2.0首次发布© 2023 大疆创新 版权所有3目录声明 ......................................................................................................................................................... 2 阅读提示 .. (2)符号说明 .......................................................................................................................................... 2 修改日志 .................................................................................................................................................. 2 1. 大赛概要 (5)1.1 大赛简介 ................................................................................................................................... 5 1.2 参赛队伍名单 ............................................................................................................................ 5 2. 赛制及奖项 (9)2.1大赛制度 ................................................................................................................................... 9 2.1.1 抽签方式 ............................................................................................................................ 9 2.1.2 赛制 .. (9)2.2奖项设置 ................................................................................................................................. 10 2.2.1 3V3对抗赛 ...................................................................................................................... 10 2.2.2 步兵对抗赛 ....................................................................................................................... 11 2.2.3机器人实战奖 (11)3. 参赛日程 ........................................................................................................................................ 134.比赛场序 (16)4.1 场地适应性训练时间表 ................................................................................................................... 16 4.2 比赛场序及时间表 .. (17)4.2.1 3V3对抗赛赛程.................................................................................................................. 17 4.2.2 步兵对抗赛赛程 .................................................................................................................. 19 4.3 比赛流程 ............................................................................................................................. 24 4.3.1 报到日流程 ...................................................................................................................... 24 4.3.2比赛日流程 (25)4.3.3 单场比赛流程 ....................................................................................................................... 26 5.场馆信息 ................................................................................................................................................ 27 5.1比赛地点 .......................................................................................................................................... 27 5.2场地示意图 .. (27)5.2.1 报到及场馆路线指引 .......................................................................................................... 27 5.2.2 场馆内主规划图 .................................................................................................................. 28 5.2.3 备场&观赛规划图 ............................................................................................................... 28 5.2.4 锂电池充电区 ..................................................................................................................... 29 5.3主要交通路线 .................................................................................................................................. 29 5.4周边餐饮 (31)6. 参赛声明 (32)6.1参赛安全须知 (32)6.2 赛前声明 (33)6.3 知识产权声明 (34)4 © 2023 大疆创新版权所有© 2023 大疆创新 版权所有51. 大赛概要1.1 大赛简介作为全国大学生机器人大赛旗下赛事之一,RoboMaster 机甲大师赛高校系列赛,是由大疆创新发起,专 为全球科技爱好者打造的机器人竞技与学术交流平台。
激发创新,拓宽视野_中国大学生机械工程创新创意大赛物流技术(起重机)创意赛历届大赛回顾

激发创新,拓宽视野中国大学生机械工程创新创意大赛物流技术(起重机)创意赛历届大赛回顾采 编/高 源随着全球物流行业的飞速发展,物料搬运设备(起重机)作为物流领域的关键设备,其技术创新与升级显得尤为重要。
为了激发青年学子的创造力和实践能力,推动中国物流技术的创新发展,中国大学生机械工程创新创意大赛物流技术(起重机)创意赛应运而生。
本项赛事是由中国机械工程学会物流工程分会与全国“双一流”建设高校---武汉理工大学、西南交通大学、同济大学、大连理工大学以及我国第一所重型机械本科院校---太原科技大学等五所高校共同作为发起单位,于2016年面向全国在校研究生、本科生、专科生开展的一项公益性竞赛活动,截止到2023年底,本项赛事已经连续举办了八届。
创办本项赛事的宗旨是通过实物比赛的方式增强大学生的科技创新意识,鼓励大学生积极投身科技创新与工程实践活动,重点聚焦大学生针对实际工程需求进行物料搬运设备(起重机)设计和工艺制作的实际动手能力,拓宽大学生的科技创新视野。
本赛事自创办以来,通过贴近实际工程需要的题目设置,不断激发学生们的创新思维,不仅考验了学生们对传统机械工程知识的掌握,更激发了大学生综合运用多学科知识的能力,参赛作品展现的早已超出了传统起重机的范畴,逐步体现出具有现代科技的智SPECIAL REPORT能化物料搬运装备(智能搬运机器人)的雏形。
这一赛事不仅为大学生提供了一个展示才华的舞台,更为业界输送了一批批具备创新思维和实践能力的优秀人才。
通过竞赛的方式增强大学生的科技创新意识,鼓励大学生积极投身科技创新与工程实践活动。
本项赛事的题目和规则设置均来源于实际工程的需要而非纯理论考量,理论知识与实际应用相结合。
本项赛事的竞赛方式是将参赛学生们亲手设计和制作的实物作品放在统一的场地里进行比拼,并根据任务完成的实际情况以及作品在绿色轻量化和设计创新性等多个方面进行最终的评审。
这种竞赛方式不仅考验了学生们对传统机械工程知识的掌握,更激发了大学生综合运用多学科知识的能力,参赛作品展现的早已超出了传统起重机的范畴,逐步体现出具有现代科技的智能化装备的雏形。
全国大学生机械创新设计大赛慧鱼组竞赛

哈尔滨工程大学
自动垃圾分拣装置
3
南京师范大学
小区垃圾清理机器人
3
兰州交通大学
多功能环保船
2
华中科技大学
智能植树机器人
3
桂林电子科技大学
自动洗碗机
3
中国海洋大学
水面垃圾打捞装置
3
四川农业大学
新概念环卫养猪场模型的设计与实现
3
合肥工业大学
Cleaner robot
3
北京化工大学
斑点狗粉刷匠
3
黑龙江工程学院
多用环卫车
2
北京交通大学
自动割草机
2
北京化工大学
多功能环境卫士
2
湘潭大学
漂浮垃圾回收处理船
2
长春工程学院
外墙清洁器
2
北京建筑工程学院
中央空调管道自动清洗机器人
2
哈尔滨理工大学
自动植树车
2
温州大学
绿化带自动修剪机器人
2
西南科技大学
垃圾初选装置
2
哈尔滨理工大学
垃圾清理机器鱼
2
郑州轻工业学院
基于网络通讯的智能家庭清洁机器人
自动割草机
3
哈尔滨工程大学
全自动割草机
3
辽宁工业大学
多功能自动清洁车
3
华中科技大学
垃圾流水线处理系统
3
湖北汽车工业学院
多功能新型垃圾收集运输车
3
青岛科技大学
智能垃圾分拣机
3
河海大学
自动炒菜机
3
西安理工大学
混合动力电动汽车慧鱼模型
3
兰州交通大学
自动包饺子机
3
全自动式食堂餐具分类初步清理系统
RoboMasters2016全国机器人大赛比赛规则
RoboMasters 全国大学生机器人大赛
1.4.2 扣除能量 ............................................................................................... 5 1.4.3 罚出赛场 ............................................................................................... 6 1.4.4 直接判负 ............................................................................................... 6 1.4.5 退赛和禁赛 ........................................................................................... 6 1.5 行为准则.......................................................................................................... 7 1.5.1 比赛目标 ............................................................................................... 7 1.5.2 不符合公平竞赛精神 ............................................................................ 7 1.5.3 官方指示 ............................................................................................... 8 1.5.4 与大赛官方人员争执 ............................................................................ 8 1.5.5 违禁物品和行为.................................................................................... 8 1.6 申诉 ................................................................................................................. 8 1.6.1 申诉有效期 ........................................................................................... 8 1.6.2 申诉证据 ............................................................................................... 8 1.6.3 申诉抵押 ............................................................................................... 8 1.6.4 决定....................................................................................................... 8 1.7 规则疑问.......................................................................................................... 9 1.7.1 官方答疑途径........................................................................................ 9 1.7.2 提问格式 ............................................................................................... 9 1.7.3 回复时间 ............................................................................................... 9 1.8 安全须知 .................................................................................................. 9 第二章 比赛元素...................................................................................................... 11 20.1 比赛概述 .............................................................................................. 11 2.2 名词解释 ................................................................................................ 12 2.2.1 自动机器人 ......................................................................................... 12 2.2.2 半自动机器人...................................................................................... 12 2.2.3 手动机器人 ......................................................................................... 12 2.2.4 机器人外壳 ......................................................................................... 13 2.2.4 能量塔 ................................................................................................. 13 2.2.5 战略点 ................................................................................................. 13
疯狂老鼠队技术报告
参赛队员签名: 带队教师签名: 日 期:
目录
第1章 第2章 引言 ...................................................................................................................... IV 机械部分 ............................................................................................................... 5
IV
第 2 章 机械部分
第2章 机械部分
车模的机械部分是影响其行驶性能最直接的部分,其重要性不言而喻。一个 不良的机械系统会增加控制的难度,会为车模的速度提升带来障碍。因此,车模 的机械性能应该是优先考虑的问题。
2.1 舵机的安装
按车模说明书所说的舵机安装方法,是将舵机头朝后,安装在前悬挂中间。 这样的安装方法结构比较紧凑, 但左右转向摇臂的长度不一样,会是车模左右转 向出现略微的不对称,并且舵机的重量偏向车头,会增加车模的惯量,对车模转 向是不利的。因此,我们使用了 1/12 电动公路遥控车模常用的舵机安装方法, 使用了左右等长的转向摇臂,具体如图所示。
2.1 2.2 2.3 2.4
第3章
舵机的安装 .................................................................................................5 电路板固定和线路排布方案 .....................................................................6 传感器的安装 .............................................................................................6 车模的机械调校 .........................................................................................7
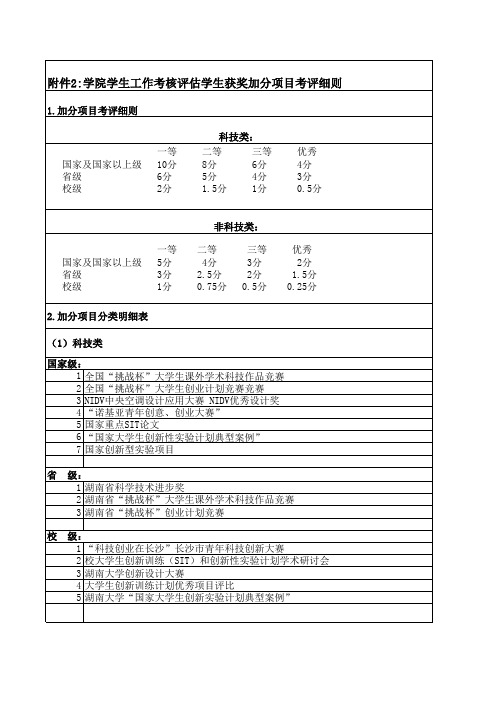
湖南大学综测学生获奖加分项目考评细则
74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120
69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 校
上海世博会吉祥物征集 全国大学生 “张江杯“浦东新区全国设计师工业设计、视觉设计创意大赛 上汽通用五菱新时代微型客车外型设计大赛 湖南省大学生艺术展演 我的e家庆奥运湖南省 湖南经广第六届动感地带高校寝室文化节 “希望之星”英语风采大赛湖南赛区 湖南省普通高等学校先进班集体 湖南省优秀大学生党员光荣称号 五四红旗团委 五四红旗团支部 芙蓉学子·学术创新奖 湖南省优秀学生干部 湖南省十佳班集体 湖南省普通高等学校优秀研究生党员 湖南省普通高等学校省级三好学生荣誉称号 优秀大学生党员 湖南大学就业工作 湖南省优秀共产党员
22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68
湖南省路桥杯结构模型大赛 中南地区结构力学竞赛 湖南省土木建筑类大学生结构模型创作竞赛 全国青少年英语技能大赛湖南赛区 省级各类征文活动 省级各类演讲、朗诵竞赛 省级各类知识竞赛 省级各类体育竞赛 省级各类书法比赛 湖南省特困优秀大学生奖学金 湖南省大学生运动会武术比赛女子普通组棍术 同声口译杯ESA之星英语歌曲大赛 “希望之星”英语风采大赛湖南赛区 湖南省“激情奥运,青春校园”演讲大赛 支教活动优秀教师 湖南省中日文化交流节日语歌曲大赛 “爱心棉被”优秀奖 湖南省日语竞赛演讲比赛大学二年级优胜奖 湖南电视台公共频道公共大戏台 “格力杯”家用电器设计大赛 聚·变-中电电气集团光伏应用设计大赛 长虹杯全国大学生感观创意设计大赛 TCL大学生工业设计大赛 “格力杯”空调设计大赛 “SMART IDEA”设计竞赛 中南地区港澳地区创新与制造 隆成童车设计大赛 湘杰广告创意 美的电水壶创意设计大赛 湖南省高校优秀毕业设计作品展 嘉兰图手机设计大赛 “杭州印象创意设计大赛” 海滨城市创意大赛 “高教社林”全国大学广告艺术大赛 深圳世界大学生夏季运动会海报设计大赛 华帝工业设计 锦绣中华“瓶”我秀——可口可乐弧形瓶“秀我家乡”设计大赛湖南赛区比赛 “华泰杯”汽车轮毂概念设计大赛 “2020 My Mobile Life”三星未来移动生活 上海双年展国际学生展 “东易日盛”杯室内设计大赛 “飞亚达杯”手表设计大赛 广州2010年亚运会徽章设计大赛 07'大城市交通工具概念设计国际邀请赛 “I家·IOO”航嘉杯机箱创意设计大赛 “艾美特未来风扇造型设计大赛 宁波国际海报双年展
智能车电磁组技术报告
4.1.3 降压稳压电路设计二 ....................................................................................... 16 4.1.4 电源模块小结 ................................................................................................... 16 4.2 路径识别模块 ............................................................................................................... 17 4.3 电机模块 ....................................................................................................................... 18 4.4 舵机模块 ....................................................................................................................... 19 4.5 测速传感器模块 ........................................................................................................... 19 第五章 软件系统设计与实现 ..................................................................................................... 20 5.1 系统初始化 ................................................................................................................... 20 5.2 路径识别算法分析及选定 ............................................................................................ 20 5.3 基于电感线圈排布理论分析 ........................................................................................ 21 5.4 电感线圈传感器接收防干扰算法 ................................................................................. 24 5.4.1 结构化赛道导线之间干扰的消减 : ..................................................................... 24 5.4.2 电感线圈传感器之间的干扰的消减 ....................................................................... 24 5.4.3 车子上工作的 PWM信号和电机工作时产生的磁场对电感线圈干扰的消减 .............. 24 5.5 舵机控制算法 ............................................................................................................... 25 5.5.1 车体与舵机转角方向测定 ................................................................................. 25 5.5.2 舵机转向角度分配 ............................................................................................ 26 5.5.3 舵机 PID 整定 .................................................................................................... 26 5.6 电机 PID 速度控制算法 ................................................................................................ 26 5.6.1 测试开环与闭环控制响应曲线 ......................................................................... 27 5.6.2 测试开环控制下 PWM占空比与电机转速之间的关系 ..................................... 28 5.6.3 bang_bang 控制 ............................................................................................... 29 5.6.4 PID 控制 ............................................................................................................ 31 5.6.5 PID 参数整定 .................................................................................................... 32 5.6.6 速度分配 ............................................................................................................ 32 第六章 开发与调试 ..................................................................................................................... 34 6.1 软件开发环境介绍 ....................................................................................................... 34 6.2 智能车整体调试 ........................................................................................................... 35 6.2.1 舵机调试 ........................................................................................................... 35 6.2.2 电机调试 ........................................................................................................... 35 6.2.3 整体调试 ........................................................................................................... 36
3 第三章 你的创意从哪里来?

3.3.2左脑思维与右脑思维
自19世纪起,人们就已经发现大脑的两个半球的功能有所不同。 左半球的优势在于分析具体的问题,它被认为是语言、理性、分析的一半;而 右半球则在分析、理解和识别画面上占优势,它往往被定位为有创新、直观、 全面和情感的一半。
孙洪义
香港城市大学 20
3.3.2左脑思维与右脑思维
3.2.2创造思维的特征
想法的流畅性(Fluency) 创造思维的另一个特点是反应快、想法多,能够在较短的时间里归纳总结、创 造出很多的想法。在反应速度和思维的丰富程度方面都要较好的表现。在创造 思维领域有一个定律,只有很多想法才会有最佳的想法。所以大量的不同想法 是创造思维的基础和前提。
孙洪义
香港城市大学 12
3.2.3创造思维的过程
创造思维是一个有一定运行机制的多元综合系统,人们通过对创造思维实践研 究,概括出创造思维的运行过程和规律,以便对创造思维有一个系统清晰的认 识。
推陈出新的创造活动过程可以看成一个渐变与突变相结合的变革过程,而创造 思维正是推动突变与变革的主因。因此,创造思维在构成上不可能是单一的思 维形式,而是若干具有创造功能的思维形式的集成。从其过程可以发现,创造 思维过程实际上存在两类思维形式,一种是具有连续渐变功能的逻辑思维形式, 如分析与综合、抽象与概括、归纳与演绎、判断与推理等;另一种是具有跳跃 突变功能的非逻辑思维形式,如联想与想象、直觉与灵感等。
微创意 Mini-c mini-creative idea 小创意 Little-c:little creative idea 专业创意 Professional-C: Professional creative idea 重大创意 Big-C: Big creative idea
Imagine Cup(微软创新杯简介)微软全球学生大赛介绍

参赛资格 2010 年秋季学年度到 2011 年春季学年度中国大陆地区在校注册学生(包括中学、中专、 大专、大学本科和大学研究生)。 竞赛方式 软件设计(中国区)选拔赛1: 报名时间 2010 年 7 月 9 日—2011 年 1 月 9 日 报名方式 请于报名截止日期前, 在 Imagine Cup 全球站点 或中文站点 上报名注册(注:仅在其中一个网站注册报名即可) 。 提交方式 1. 初赛:提交《项目计划书》 。请于 2011 年 1 月 9 日前,以 Word 文档形式按照项目 计划书模版要求在线提交。 2. 复赛:提交文档、视频和软件运行文件。2011 年 4 月 1 日前以光盘形式邮寄到北 京市朝阳区望京街 8 号利星行广场 C 座微软大厦 20 层,创新杯项目组收”,邮编:
Imagine Cup 2006 全球总决赛在印度举行,中国学生获得界面设计项目全球第二名!
北京工业大学代表队在软件设计比赛中连闯三关, 最终进入全球前六强, 并获得赴英国参加 Imagine Cup Innovation Accelerator 培训项目的机会! 中国学生还获得了视频游戏比赛项目的 全球第五名!
中文站点: 全球站点: 微软学生技术中心:/china/msdn/student
6
Imagine Cup 2011 参赛说明
参赛主题 Imagine a world where technology helps solve the toughest problems 比赛项目
报名和第一轮比赛 截止日期 2011 年 1 月 9 日 2011 年 1 月 9 日 2011 年 3 月 7 日 2011 年 3 月 7 日 2011 年 3 月 7 日 2011 年 1 月 31 日 2011 年 3 月 7 日 2011 年 4 月 27 日
美国Live Edge将举办全球电子制作竞赛
美国Live Edge将举办全球电子制作竞赛
佚名
【期刊名称】《电子制作》
【年(卷),期】2008(000)010
【总页数】1页(PM0001)
【正文语种】中文
【中图分类】TN
【相关文献】
1.美国耶鲁大学《耶鲁全球》中美太空竞赛不可避免 [J],
2.Premier Farnell公布Live EDGE挑战赛100,000美元全球大奖及五位5,000美元优胜奖得主 [J],
3.中国体育经纪人的世纪之梦:国际商业体育竞赛皇冠上的钻石——美国职业拳击拳王争霸赛移师中国的内幕揭秘和经验教训(之五)在中国举办职业拳击拳王争霸赛应遵循的程序 [J], 梁晓龙
4.中国宇航学会、美国海因莱因基金会将在中国联合举办“飞向未来——太空探索创新竞赛”活动 [J],
5.易格斯举办第七届全球塑料轴承创新应用竞赛 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7
第四届全国大学生“飞思卡尔”杯智能汽车竞赛
探测距离=T*声速/2 TRIGGER(input): 超声波发射头:
TRIGGER 输 入 大于 10us 的高电 平
8 个 40kHz 的方波
前一次检测完成 至后一次检测开 始必须有 10ms 等 待
ECHO(output):
在接下来的技术报告中,主要从机械,电路,算法三方面对本队的技术方案作 较为具体的介绍。首先在第二章中介绍本创意小车的机械部分,然后在第三章介绍 本创意车用到的电方案,第四章电路设计和第五章控制算法中对本方案的各个细节 进行介绍。
1
第二章 机械结构
我们的作品是创意小车,在车体动作方面,小车除了具备基本的行驶和转向能 力以外,更具有了攀越障碍物的能力。为了实现这些功能,我们对车体进行了专门 的设计。
3.3.1 ZigBee 协议简介 ......................................................................... 8 3.3.2 采用 ZigBee 技术设计的红绿灯和方向路牌指示系统 ......... 9 第四章 电路设计.......................................................................................... 11 4.1 核心控制器模块 ................................................................................ 12 4.1.1 MC9S08QE128 功能概述 ........................................................ 13 4.1.2 最小系统电路设计................................................................... 15 4.2 电能分配模块 .................................................................................... 16 4.2.1 LM2596-5.0 开关稳压电路................................................... 17 4.2.2 LM1117 三端稳压电路.......................................................... 17 4.2.3 MC34063DC-DC 升压电路 .................................................. 18 第五章 控制算法详解 ................................................................................. 21 5.1 障碍物检测: ..................................................................................... 21 5.2 动作规划方式 ..................................................................................... 27 5.3 黑线识别:.......................................................................................... 33 第六章 结论 .................................................................................................. 34 参考文献 .............................................................................................................I
ECHO 输出 10us 到 36ms 的高电 平,设时间为 T
如果没有检测到 反射,则检测到 36ms 高电平
简述超声波传感器工作过程:单片机给 TRIG 一个大于 10us 的高电平,模块 TRIG 使能后,发射 8 个 40kHz 的超声波;发射结束后,ECHO 拉高输出给单片机 IO 口,8 个超声波遇到障碍物反射回来,回到模块接收头,ECHO 拉低输出。这样, ECHO 高电平时间就是超声波在空气中传播的时间。根据 s=c*t/2 就可以计算出距 离。
2.1 越障机械方案的1、利用轮胎与地面摩擦力,强行驶上台阶。
如上图所示为美军“Crusher”战车驶上障碍的示意图。但方案由于需要巨大的 摩擦力做驱动,要求较大的车辆整体重量(“Crusher”重达 4 吨)稳定性得不到保证。
2、考虑在轮毂与车架间加上摇臂作为连接,是轮子能在一定的高度范围内向 上抬升,这样就可利用摇臂转动时的力矩提供垂向力
2.1 越障机械方案的选取 ........................................................................... 2 2.2 转向机械方案的选取 ........................................................................... 4 2.3 机械结构设计过程: .......................................................................... 5 第三章 电方案概述 ....................................................................................... 7 3.1 光电道路识别方案 .............................................................................. 7 3.2 超声波传感器 ...................................................................................... 7 3.3 ZigBee .................................................................................................... 8
II
第一章 引言
本论文按照第四届“飞思卡尔”杯全国大学生智能汽车竞赛创意组比赛的要求, 在分析了传统竞速组论文和技术的基础上,加入了无线传感器网络 ZIGBEE 技术, 让小车具有了自己独有的功能。
本队采用两片飞思卡尔公司 8 位处理器 MCS9S08QE128 作为核心控制器,此 芯片功能丰富,性能强大,可以同时进行信号处理和电机控制,在算法设计上有了 更大的空间和更灵活的方案。在基本的路径识别方面,本队采用了光电传感器,经 过创新设计,成功解决了传感器探测距离和探测精度的问题,使本队小车能够精确 识别线路,并且还有着极高的稳定性和抗干扰能力。并且采用了差动转速实现转向, 小车车体庞大但转向不失灵活。
作为创意小车,我们的小车有两手绝活。首先就是“攀越障碍”,本队小车车 体由我们自主设计制作,三排车轮和活动臂的结构,搭配上小车胸前的超声波传感 器,让小车具有了识别障碍,攀越障碍的能力。还有就是“识别红绿灯和方向牌” 的绝活,本队引入了无线网络 ZigBee 技术,通过设置在赛道旁以及小车上面的无 线传感器节点,让我们的小车成为了一个能够识别红绿灯和方向指示牌,严格遵守 交通规则的智能之车,这在当前交通事故频发的今天很有实际意义。
参赛队员签名:
带队教师签名:
日
期:
I
目录
目 录 ............................................................................................................... II 第一章 引言 .................................................................................................... 1 第二章 机械结构............................................................................................ 2
2
第 3 章 电方案概述
攀越过程如右图所示:
相比第一种方案,第二种方案能够攀上更高的障碍物,且对轮胎等伤害较小, 所以我们选取了第二种方案。
3
第四届全国大学生“飞思卡尔”杯智能汽车竞赛
2.2 转向机械方案的选取
在实现转向功能时,根据阿卡曼原理,相对较理想多轮转向机构如下图所示:
且符合下列方程式:
3.1 光电道路识别方案
BigBee 采用光电传感器识别道路上的黑线,由于选用了性能卓越的传感器,识 别的稳定性和分辨率非常高。共有四个传感器安装在车体的前方,可以采样四个信 息点。如果传感器检测到黑线,则返回逻辑 1,检测到白色路面,则返回逻辑 0。 中间两个点间距较小,保证了在直线内的行驶的平顺,两边的两个传感器距离则较 大,保证了转向时的稳定。
第四届全国大学生“飞思卡尔”杯 智能汽车竞赛
技术报告
学 校: 队伍名称: 参赛队员:
带队教师:
同济大学
BigBee 陈晓辰 肖恺 胡凤鉴 朱捷 谢乐寅 罗峰
曹静