CheVi_Tree.Manual
opencv中文手册
目录• 1 梯度、边缘和角点o 1.1 Sobelo 1.2 Laplaceo 1.3 Cannyo 1.4 PreCornerDetecto 1.5 CornerEigenValsAndVecso 1.6 CornerMinEigenValo 1.7 CornerHarriso 1.8 FindCornerSubPixo 1.9 GoodFeaturesToTrack • 2 采样、插值和几何变换o 2.1 InitLineIteratoro 2.2 SampleLineo 2.3 GetRectSubPixo 2.4 GetQuadrangleSubPixo 2.5 Resizeo 2.6 WarpAffineo 2.7 GetAffineTransformo 2.8 2DRotationMatrixo 2.9 WarpPerspectiveo 2.10 WarpPerspectiveQMatrixo 2.11 GetPerspectiveTransformo 2.12 Remapo 2.13 LogPolar• 3 形态学操作o 3.1 CreateStructuringElementExo 3.2 ReleaseStructuringElemento 3.3 Erodeo 3.4 Dilateo 3.5 MorphologyEx• 4 滤波器与色彩空间变换o 4.1 Smootho 4.2 Filter2Do 4.3 CopyMakeBordero 4.4 Integralo 4.5 CvtColoro 4.6 Thresholdo 4.7 AdaptiveThreshold• 5 金字塔及其应用o 5.1 PyrDowno 5.2 PyrUp• 6 连接部件o 6.1 CvConnectedCompo 6.2 FloodFillo 6.3 FindContourso 6.4 StartFindContourso 6.5 FindNextContouro 6.6 SubstituteContouro 6.7 EndFindContourso 6.8 PyrSegmentationo 6.9 PyrMeanShiftFilteringo 6.10 Watershed•7 图像与轮廓矩o7.1 Momentso7.2 GetSpatialMomento7.3 GetCentralMomento7.4 GetNormalizedCentralMomento7.5 GetHuMoments•8 特殊图像变换o8.1 HoughLineso8.2 HoughCircleso8.3 DistTransformo8.4 Inpaint•9 直方图o9.1 CvHistogramo9.2 CreateHisto9.3 SetHistBinRangeso9.4 ReleaseHisto9.5 ClearHisto9.6 MakeHistHeaderForArrayo9.7 QueryHistValue_1Do9.8 GetHistValue_1Do9.9 GetMinMaxHistValueo9.10 NormalizeHisto9.11 ThreshHisto9.12 CompareHisto9.13 CopyHisto9.14 CalcHisto9.15 CalcBackProjecto9.16 CalcBackProjectPatcho9.17 CalcProbDensityo9.18 EqualizeHist•10 匹配o10.1 MatchTemplateo10.2 MatchShapeso10.3 CalcEMD2梯度、边缘和角点Sobel使用扩展 Sobel 算子计算一阶、二阶、三阶或混合图像差分void cvSobel( const CvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size=3 );src输入图像.dst输出图像.xorderx 方向上的差分阶数yordery 方向上的差分阶数aperture_size扩展 Sobel 核的大小,必须是 1, 3, 5 或 7。
Kawasaki KAF620 Mule 3010 2001-2008 车辆维修手册说明书
Kawasaki KAF620 Mule 3010 2001-2008 Workshop Service Repair ManualKawasaki KAF620 Mule 3010 2001 Manual - Kawasaki KAF620 Mule 3010 2002 Manual - Kawasaki KAF620 Mule 3010 2003 Manual - KawasakiKAF620 Mule 3010 2004 Manual - Kawasaki KAF620 Mule 3010 2005 Manual - ...Download NowSimilar manuals:Kawasaki KAF620 Mule 3010 2001-2008 Workshop Service Repair ManualKawasaki KAF620 Mule 3010 2001-2008 Service Manual 2002 2003 2004 2005 2006 20072004-2008 Kawasaki Mule 3010 KAF620 UTV Repair Manual PDF2004-2008 Kawasaki Mule 3010 KAF620 ATV Repair Manual PDF2004-2008 Kawasaki Mule 3010 KAF620 ATV Repair Manual PDFKAWASAKI MULE 3010 TRANS KAF620 2005 2006 2007 2008 4x4 ATV Repair Service Manual2001-2002 Kawasaki Mule KAF620 3000 3010 3020 UTV Repair PDF2001-2002 Kawasaki Mule KAF620 3000 3010 3020 ATV Repair PDF2001-2002 Kawasaki Mule KAF620 3000 3010 3020 UTV Repair Manual PDF Kawasaki KAF620 Mule 3010 Trans 4x4 Service Repair Workshop Manual2005 Kawasaki Mule 3010 Trans 4x4 KAF620 Repair Repair Workshop Manual DOWNLANDKawasaki Mule 3010 KAF620 Trans 4x4 gas 2005 Repair Service Manual KAWASAKI KAF 620 Mule 3000 3010 3020 2001-2008 REPAIR SERVICE MANUAL 2002 2003 2004 2005 2006 2007Kawasaki Mule 3010 3020 3000 2001-2007 Motorcycle Workshop Manual2008 Kawasaki KAF950D Mule 3010 Diesel 4x4 UTV Repair Manual2008 Kawasaki KAF950D Mule 3010 Diesel 4x4 UTV Repair PDF2008 Kawasaki KAF950D Mule 3010 Diesel 4x4 UTV Repair Manual PDFKawasaki Mule 3010 parts list. 2008. Model KAF950D8F1994-2000 Kawasaki KAF620 Mule 2500 2510 2520 UTV Repair PDF2009-2011 Kawasaki KAF620 Mule 4010 Trans 4x4 UTV Repair PDF1994-2000 Kawasaki KAF620 Mule 2500 2510 2520 UTV Repair PDF2009-2011 Kawasaki KAF620 Mule 4010 Trans 4x4 UTV PDF2009-2011 Kawasaki KAF620 Mule 4010 Trans 4x4 UTV Repair Manual PDF1994-2000 Kawasaki KAF620 Mule 2500 2510 2520 UTV Repair Manual PDF KAWASAKI KAF620 MULE 2500 2510 2520 1994 1995 1996 1997 1998 1999 2000UTV REPAIR Service Manual2003 2004 Kawasaki Mule 3010 Diesel Service Repair Workshop Manual DOWNLOAD KAWASAKI KAF950 Mule 3010 DIESEL 2003-2007 ATV Repair Service Workshop ManualKawasaki Mule 3010 Diesel 2003 2004 Service Repair Workshop ManualKawasaki KAF950 Mule 3010 Diesel Service Repair Workshop ManualKawasaki KAF 620 Mule 3000 3010 3020 Trans 4x4 Service Repair Workshop Manual KAWASAKI MULE 610 4 x 4, KAF400 MULE 600 2003 2004 2005 2006 2007 2008 2009 Repair Service Manual2005 Kawasaki Mule 3010 TRANS 4¡Á4 Service Repair Manual DOWNLOAD2003-2004 Kawasaki KAF950 MULE 3010 Diesel UTV Repair Manual2003-2004 Kawasaki KAF950 MULE 3010 Diesel ATV Repair PDFKawasaki Mule 3010 4x4 shop manual. year 2005Kawasaki Mule 3010 4x4 shop manual & owners manual 2 manuals2003-2004 Kawasaki KAF950 MULE 3010 Diesel UTV Repair Manual PDF Kawasaki Mule 3010 Series Light Truck Farm UtilityKawasaki Mule 3010 4x4 owners manualKawasaki KAF950 Mule 3010 Diesel Factory Service Repair ManualMULE 3010 DIESEL , 2002 KAWASAKI SERVICE REPAIR MANUALMULE 3010 TRANS 4X4, 2005 KAWASAKI SERVICE REPAIR MANUAL KAWASAKI KAF 620 Mule 3010 Trans 4x4 REPAIR SERVICE MANUAL Kawasaki Mule 3010 Trans Gas Service Manual2005 Kawasaki MULE 3010 TRANS 4X4 Service Repair Manual2002-2006 Kawasaki MULE 3010/3020/3000 Service Repair Manual2005 Kawasaki MULE 610 4¡Á4 MULE 600 Service Repair Manual DOWNLOADKawasaki MULE 610 4x4 MULE 600 2005 Service Repair ManualMule 3010 diesel Repair and Service Manual 2003-2004 KAF9502005 Kawasaki Mule3010 Trans 4x4 KAF620 Workshop Service Repair Manual DOWNLOADKawasaki MULE 600 2005-2013 UTV ATV Side by Side Service Repair Manual 2006 2007 2008 2009 2010 2011 2012Kawasaki MULE 610 4x4 2005-2013 UTV ATV Side by Side Service Repair Manual 2006 2007 2008 2009 2010 2011 2012KAWASAKI KAF 620 Mule 2510 2520 1993-2003 SERVICE REPAIR MANUAL 1994 1995 1996 1997 1998 1999 2000 2001 20021991-1998 Kawasaki KAF450-B1 Mule 1000 ATV Workshop Service Repair Manual DOWNLOAD 1991 1992 1993 1994 1995 1996 1997 19982009-2010 Kawasaki KAF620R S Mule 4010 Trans4x4 Service Repair Workshop Manual DOWNLOADKawasaki KAF 400 Mule 600 610 4x4 Service Repair Workshop ManualKawasaki Mule 600 610 4x4 2005-2013 UTV Service Repair Workshop Manual Kawasaki MULE 4010 Diesel 2009-2012 Workshop Repair Service ManualKawasaki KAF540 2010 2020 2030 Mule Service Repair Workshop ManualKawasaki KAF450-B1 Mule 1000 1991 1992 1993 1994 1995 1996 1997 1998 ATV Workshop Service Repair ManualKawasaki KAF 450 Mule 1000 Service Repair Workshop ManualToro Hydroject 3010 Service Repair Workshop Manual DOWNLOADKawasaki KAF 400 Mule 600 610 Service Manual 2005Kawasaki KAF 400 Mule 600 610 4x4 Repair Service ManualKawasaki Kaf450 Mule 1000 Factory Service Manual2005 Kawasaki Mule610 4x4 Mule 600 KAF400 Service Manual1989-1997 Kawasaki KAF450 Mule 1000 UTV Repair Manual PDF2000-2002 Kawasaki KAF950 Mule 2510 Diesel UTV Repair Manual2003-2007 Kawasaki KAF950 Mule 3010D UTV Repair Manual PDF2005-2009 Kawasaki Mule 610 KAF400 UTV Repair Manual PDF2009-2011 Kawasaki KAF950 Diesel Mule 4010 Trans 4x4 UTV Repair Manual PDF Download2009-2011 Kawasaki KAF950D Mule 4010 Diesel 4x4 UTV Repair2009-2011 Kawasaki Mule 4000 4010 4x4 UTV Repair Manual PDFKawasaki KAF400-Mule-600-610-4x4 Service Manual 2005Kawasaki KAF400-Mule-600-610-4x4 Service Manual 20051989-1997 Kawasaki KAF450 Mule 1000 ATV Repair Manual PDF2000-2002 Kawasaki KAF950 Mule 2510 Diesel ATV Repair PDF2003-2007 Kawasaki KAF950 Mule 3010D UTV Repair Manual PDF2005-2009 Kawasaki Mule 610 KAF400 ATV Repair Manual PDF2009-2011 Kawasaki KAF950 Diesel Mule 4010 Trans 4x4 UTV Repair Manual PDF2009-2011 Kawasaki KAF950D Mule 4010 Diesel 4x4 UTV PDF2009-2011 Kawasaki Mule 4000 4010 4x4 UTV Repair Manual PDFKawasaki mule 4010 4x4 (KAF950G) service manualKawasaki mule 4010 4x4 diesel owners manualKawasaki mule 4010 4x4 service manual and operators manual.Kawasaki mule 4010 4 x 4 manual collection. 3 x manuals.2009-2011 Kawasaki KAF950 Diesel Mule 4010 Trans 4x4 UTV Repair Manual PDF 2009-2011 Kawasaki KAF950D Mule 4010 Diesel 4x4 UTV Repair Manual PDF2009-2011 Kawasaki Mule 4000 4010 4x4 UTV Repair Manual PDF1989-1997 Kawasaki KAF450 Mule 1000 UTV Repair Manual PDF2000-2002 Kawasaki KAF950 Mule 2510 Diesel UTV Repair Manual PDF2003-2007 Kawasaki KAF950 Mule 3010D UTV Repair Manual PDF.pdf2005-2009 Kawasaki Mule 610 KAF400 ATV Repair Manual PDFKawasaki mule 4010 4x4 service,owners and assembly manualsKawasaki mule 4010 4x4 service manual & owners manualKawasaki MULE 4010 TRANS 2009-2012 4×4 Diesel Service Repair Manual DownloadKawasaki Mule 600/610 KAF400 Factory Repair ManualMULE 610,600 , 2005 KAWASAKI SERVICE REPAIR MANUALKAWASAKI KAF300 MULE 500 UTILITY VEHICLE SERVICE REPAIR MANUAL THE Kawasaki Mule 600 610 Service ManualKawasaki MULE 4010 TRANS 4×4 2009 2010 2011 2012 UTV ATV Service Repair ManualKawasaki Mule 2510 2520 Service ManualKawasaki KAF950G H Mule 4010 Trans4x4 Diesel 2009 2010 2011 2012 Service Repair Factory ManualKawasaki Mule 4010 Trans Gas 2009 2010 Factory Service ManualKawasaki KAF450 Mule 1000 Factory Service ManualKawasaki Mule 1000 Service Manual2005 Kawasaki Mule 610 4X4 600 Utility Vehicle ServiceManual2009-2012 Kawasaki MULE 4010 TRANS4X4 Service Repair Manual2005-2011 Kawasaki MULE 610 4X4 600 Service Repair Manual2000-2008 Kawasaki VN1500 Vulcan 1500 Classic Fi Motorcycle Workshop Service Repair Manual Download 2000 2001 2002 2003 2004 2005 2006 2007 20081996-2008 Kawasaki En500 Vulcan 500 LTD Motorcycle Workshop Service Repair Manual Download 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008John Deere 3010 3020 Tractor Service Shop ManualJohn Deere 3010 3020 Tractor Service Shop Manual.2001-2010 Kawasaki KX85 KX85-II KX100 Workshop Motorcycle Servcie Repair Manual Download 2001 2002 2003 2004 2005 2006 2007 2008 2009 20102001-2008 Suzuki Outboard DF90 DF115 Service Repair Workshop Manual DOWNLOAD (2001 2002 2003 2004 2005 2006 2007 2008)2003-2008 Kawasaki KX125 KX250 Workshop Motorcycle Servcie Repair Manual Download 2003 2004 2005 2006 2007 20082006-2008 Kawasaki KX250F Workshop Motorcycle Servcie Repair Manual Download 2006 2007 20082006-2008 Kawasaki KX450F Workshop Motorcycle Servcie Repair Manual Download 2006 2007 20082008-2010 Kawasaki KLX450R Workshop Motorcycle Servcie Repair Manual Download 2008 2009 20102000-2011 Kawasaki KX65 Workshop Motorcycle Servcie Repair Manual Download 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011Kawasaki VN1500 Vulcan 1500 Classic Fi 2000-2008 Motorcycle Workshop Service Repair Manual 2001 2002 2003 2004 2005 2006 2007How to Revive Mule NiCad Battery NiCd Fix2001-2007 Kawasaki ZRX1200R ZRX1200S ZRX1200 Workshop Service Repair Manual Download 2001 2002 2003 2004 2005 2006 2007Kawasaki ZRX1200R ZRX1200S ZRX1200 2001-2007 Motorcycle Service Repair Workshop Manual 2001 2002 2003 2004 2005 200 20072001-2009 Suzuki Outboard DF90, DF100, DF115, DF140 Service Repair Workshop Manual DOWNLOAD (2001 2002 2003 2004 2005 2006 2007 2008 2009)2007-2008 Kawasaki Ninja 250R Service Repair Manual Download 2007 20082001-2005 Kawasaki ER500 ER-5 Service Reapir Manual DOWNLOAD 2001 2002 2003 2004 20051993-2001 Kawasaki Ninja ZX-11 ZZ-R1100 Service Repair Manual Download 1993 1994 1995 1996 1997 1998 1999 2000 20012001-2007 Kawasaki KX85 KX100 Service Repair Manual Download 2001 2002 2003 2004 2005 2006 20072001-2009 Suzuki DF90, DF100, DF115, DF140 Outboard Service Repair Manual DOWNLOAD */2001, 2002, 2003, 2004, 2005, 2006, 2007, 2008,2009 */2001-2009 Suzuki DR-Z250 Service Repair Manual DOWNLOAD 2001 2002 2003 2004 2005 2006 2007 2008 2009Kawasaki Z750 2007-2008 Workshop Service repair manualKawasaki 1400GTR 2007-2008 Workshop Service repair manual2008 Kawasaki Ninja 250R EX250J8F* Factory Service / Repair/ Workshop Manual Instant Download! (08)2008 Kawasaki Ninja 250R EX250K8F* Factory Service / Repair/ Workshop Manual Instant Download! (08)2002-2009 Kawasaki KLX110 Workshop Motorcycle Servcie Repair Manual Download 2002 2003 2004 2005 2006 2007 2008 20092008 2009 Kawasaki Ninja ZX-10R ZX1000 Workshop Service Repair ManualDownload2007-2008 Kawasaki JT1500B Jet Ski Ultra 250X Service Repair Workshop Manual DOWNLOAD2008 Kawasaki KVF750 4X4 Brute Force 750 4X4i Service Repair Workshop Manual DOWNLOAD2007-2010 Kawasaki JT1500B Jet Ski Ultra 250 260X LX Service Repair Workshop Manual DOWNLOAD (2007 2008 2009 2010)2008 Kawasaki Brute Force 750 4x4i KVF750 4x4 Workshop Service Repair Manual DownloadKAWASAKI Z 750 2003 - 2008 SERVICE Workshop Repair MANUALKawasaki ZX-10R Ninja 2008 - 2010 Service Workshop Manual2006-2008 Kawasaki Jet Ski X-2 Watercraft JF800 Workshop Service Repair Manual DOWNLOAD2008-2012 Kawasaki KLR650 Workshop Service Repair Manual DOWNLOAD 08 09 10 11 122008 Kawasaki KFX 450R KFX450R ATV Workshop Service Repair Manual DOWNLOAD 082008-2010 Kawasaki Ninja ZX-10R Workshop Service Repair Manual DOWNLOAD 08 09 102008-2011 Kawasaki Brute Force 750 4×4i KVF 750 4×4 ATV Workshop Service Repair Manual DOWNLOAD 08 09 10 112006-2008 Kawasaki Ninja 650R ER-6f ABS ER-6f EX650 Workshop Service Repair Manual DOWNLOAD 06 07 082008-2011 Kawasaki ZZR1400 ZZR1400 ABS Ninja ZX-14 Workshop Service Repair Manual DOWNLOAD 08 09 10 112008-2012 Kawasaki Ninja 250R Workshop Service Repair Manual DOWNLOAD 08 09 10 11 12kawasaki KX125M1 thru KX125M8F 2003 to 2008 workshop manualKawasaki KX450F 2006-2008 Motorcycle Workshop Service repair manualKawasaki KX250F 2006 2007 2008 Workshop Service Repair ManualKawasaki Jetski Ultra 250X JT1500 2007-2008 Service Repair Workshop Manual Kawasaki JT1500B JetSki Ultra 250X 2007-2008 Service Repair Workshop Manual Kawasaki KLX450R KLX450 2008 Service Repair Workshop ManualKawasaki KX450F 2006-2008 Motorcycle Workshop Servcie Repair Manual Kawasaki Ninja 250R 2008-2009 Motorcycle Service Repair Workshop Manual Kawasaki Ninja 250R EX 250 2008 Motorcycle Service Repair Workshop Manual Kawasaki En500 Vulcan 500 LTD 1996-2008 Motorcycle Workshop Service Repair ManualKawasaki JT1500B Jet Ski Ultra 250X 2007-2008 Service Repair Workshop Manual Kawasaki KFX450R KSF450 KFX450 R Motorcycle 2008-2012 Service Repair Workshop ManualKawasaki Teryx 750 4x4 KRF750 KRF 750 2008 UTV Service Repair Workshop ManualKawasaki KVF750 4X4 Brute Force 750 4X4i 2008 ATV Service Repair Workshop ManualKawasaki Jetski STX-15F JT1500 2006 2007 2008 2009 Service Repair Workshop ManualKawasaki VN900 Classic Vulcan 900 Classic LT 2006 2007 2008 2009 2010 2011 Service Repair Workshop ManualKawasaki BRUTE FORCE 650 4×4, KVF650 4×4 2005-2013 Service Repair Workshop Manual 2006 2007 2008 2009 2010 2011 2012Kawasaki JetSki Ultra 250X Ultra 260X Ultra 260LX 2007 2008 2009 2010 Watercraft Factory Service Repair Workshop ManualKawasaki KVF750 4x4, Brute Force 750 4x4i 2008 2009 2010 2011 FACTORY SERVICE REPAIR WORKSHOP MANUALKawasaki Versys KLE 650 2007 2008 Service Repair Workshop ManualKawasaki ZX1000 Ninja ZX-10R 2008 Service Repair Workshop ManualKawasaki 1400 GTR, concours 14 ABS, concours 14, 2007 2008 Workshop Service repair manualKawasaki 1400GTR, Concours 14 2007 2008 2009 2010 2011 2012 2013 Workshop Service Repair ManualKawasaki Concours 14 1400-GTR ZG1400 ABS 1400GTR 2008 Service Repair Workshop ManualKawasaki Concours 14 1400 ZG1400 GTR ZG 2008 Service Repair Workshop Manual Kawasaki Ninja ZX-14, ZZR1400, ZZR1400ABS 2008 2009 2010 2011 Service Repair Workshop ManualKawasaki Concours 14 1400-GTR ZG1400 ABS 1400GTR 2008-2009 Service Repair Workshop Manual (also for: 2010 2011 2012)2000-2008 Kawasaki Ninja ZX-6R ZX600 Workshop Service Repair Manual DOWNLOAD 00 01 02 05 06 07 082000-2003 Kawasaki Ninja ZX-6R Workshop Service Repair Manual Download 2000 2001 2002 20031993-2001 Kawasaki ZX1100 ZZ-R1100 Ninja ZX-11 Service Repair Workshop Manual DOWNLOADKAWASAKI ZRX 1200 2001 - 2006 SERVICE Workshop Repair MANUAL KAWASAKI ZX 11 NINJA 1993 - 2001 SERVICE Workshop MANUAL1999-2002 Kawasaki KX125 KX250 Motorcycle Workshop Repair Service Manual DOWNLOAD 1999 2000 2001 2002Kawasaki ER-5 ER500 2001-2005 Motorcycle Service Repair Workshop Manual Kawasaki ZRX1200 ZR1200 ZRX1200R ZRX1200S 2001-2007 Motorcycle Service Repair Workshop ManualKawasaki ZX9R 1998 1999 2000 2001 Workshop Service Repair ManualKawasaki KZ, ZX & ZN 1000-1100cc 1981-2002 Motorcycle Workshop Repair ServiceManual 1982 1983 1984 1985 1986 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001Kawasaki Vulcan EN450 EN500 Twins 1985-2004 Service Repair Workshop Manual 1986 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003Kawasaki 1100ZXi Jetski 1996 1997 1998 1999 2000 2001 2002 Service Repair Workshop ManualKAWASAKI VN 2000 2001 2002 2003 2004 Service Repair Workshop Manual Kawasaki KLX300R KLX 300 1997-2007 Service Repair Workshop Manual 1998 1999 2000 2001 2002 2003 2004 2005 2006Kawasaki Ninja ZX6R ZX-6R ZX600 2000 2001 2002 Service Repair Workshop Manual Kawasaki VN1500 Classic Vulcan 1500 Classic 1996-2004 Service Repair Workshop Manual 1997 1998 1999 2000 2001 2002 2003Kawasaki VN 750 Twin VN700 1985-2006 Service Repair Workshop Manual 1986 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005Kawasaki KMX 125 1986-2002 Service Repair Workshop Manual 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001KAWASAKI VN 800 Vulcan 800 1995-2005 Service Repair Workshop Manual 1996 1997 1998 1999 2000 2001 2002 2003 2004Kawasaki Bayou 300 KLF300 KLF 300 1986-2006 Workshop Service Repair Manual 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005Kawasaki Bayou 300 KLF300 KLF 300 1986-2006 Workshop Service Repair Manual 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005Kawasaki Bayou 300 4x4 1986-2006 Service Repair Workshop Manual 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 Kawasaki ZRX1200 2001-2007 Workshop Service Repair Manual 2002 2003 2004 2005 2006Kawasaki Ninja ZX 11 ZX1100 ZZ-R1100 1993-2001 Service Repair Workshop Manual 1994 1995 1996 1997 1998 1999 2000Kawasaki ZG 1200 Voyager XII 1986-2003 Service Repair Workshop Manual 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 Kawasaki KDX200 KDX 200 1995-2006 Service Repair Workshop Manual 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005Kawasaki KDX220R KDX220 KDX 220 1997-2005 Service Repair Workshop Manual 1998 1999 2000 2001 2002 2003 2004Kawasaki EN500 Vulcan 500 LTD 1996-2005 Service Repair Workshop Manual 1997 1998 1999 2000 2001 2002 2003 2004Kawasaki VN1500 Vulcan Nomad Classic Tourer 1998 1999 2000 2001 Service Repair Workshop ManualKawasaki Ninja ZX9R ZX900 1998 1999 2000 2001 Service Repair Workshop ManualKawasaki KEF 300 Lakota Sport 1995-2004 Service Repair Workshop Manual 1996 1997 1998 1999 2000 2001 2002Kawasaki ZG 1200 Voyager XII 1986-2003 Service Repair Workshop Manual 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 Kawasaki ZX 1100 ZZ-R1100 Ninja ZX-11 1993-2001 Service Repair Workshop Manual 1994 1995 1996 1997 1998 1999 2000Kawasaki KLR 250 1984-2005 Service Repair Workshop Manual 1985 1986 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 Kawasaki Ninja ZX-7RR ZX-7R ZX7R ZX7RR ZX750 1996 1997 1998 1999 2000 2001 2002 2003 Service Repair Workshop Manual2008-2009 Suzuki GSX-R600 Workshop Service Repair Manual DOWNLOAD 2008 20092008-2009 Suzuki GSX1300R GSX-R1300 Hayabusa Workshop Service Repair Manual DOWNLOAD 2008 20092004-2008 Suzuki Swift Sport RS416 Workshop Service Repair Manual DOWNLOAD 2004 2005 2006 2007 20082008-2011 Yamaha XV19 Raider Roadliner and Stratoliner S Workshop Service Repair Manual DOWNLOAD 2008 2009 2010 20112008-2009 Can-Am ATV Spyder GS SM5/SE5 Spyder GS Service Repair Workshop Manual Download 2008 20092004-2008 Yamaha YFM50 Raptor Service Repair Workshop Manual DOWNLOAD (2004 2005 2006 2007 2008)2006-2008 Polaris FS FST Snowmobile Service Repair Workshop Manual DOWNLOAD (2006 2007 2008)2004-2008 Suzuki Swift Sport RS416 Service Repair Workshop Manual DOWNLOAD (2004 2005 2006 2007 2008)2005-2008 Jeep Grand Cherokee WK Workshop Service Repair Manual DOWNLOAD 2005 2006 2007 20082008-2010 Subaru Impreza Service Repair Workshop Manual DOWNLOAD (2008 2009 2010)2008-2010 Yamaha FX Nytro FX10 Series Snowmobile Workshop Service Repair & Supplement Manual DOWNLOAD 2008 2009 20102007-2008 Polaris IQ Snowmobile Workshop Service Repair Manual DOWNLOAD 2007 20082003-2008 KTM 950 990 ADVENTURE, 990 Super Duke / R, Supermoto / R Super Enduro Workshop Service Repair Manual Download 2003 2004 2005 2006 2007 2008 1999-2010 Yamaha XVZ13 Royal Star Venture Workshop Service Repair Manual DOWNLOAD 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 20101999-2010 KTM 125 144 150 200 SX, SXS, MXC, EGS, EXC, EXC SIX DAYS, XC, XC-W Workshop Service Repair Manual Download 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010Ford Ranger 2001-2008 Service Workshop repair manualCHRYSLER PT CRUISER 2001-2008 WORKSHOP REPAIR MANUALBMW K1200LT Motorcycle 1998, 1999, 2000, 2001, 2002, 2003, 2004, 2005, 2006, 2007, 2008, 2009 Workshop Repair Service ManualHONDA VTX 1300 S 2001-2008 BIKE WORKSHOP REPAIR MANUALYAMAHA VIRAGO 250 XV250 1988-2009 MOTORCYCLE WORKSHOP REPAIR SERVICE MANUAL 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008Yamaha Vstar 650 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 Motorcycle Service Workshop ManualPeugeot 307 2001 2002 2003 2004 2005 2006 2007 2008 Workshop Service Repair ManualSuzuki VL800 2001 2002 2003 2004 2005 2006 2007 2008 2009 Workshop Service Repair ManualYamaha Wolverine 350 YFM350 1995-2009 Service Repair Workshop Manual 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008PT CRUISER 2000-2010 TECHNICAL WORKSHOP MANUAL 2001 2002 2003 2004 2005 2006 2007 2008 2009Polaris Ranger 500 EFI 2x4 4x4 6x6 1999-2012 Service Repair Workshop Manual 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011Yamaha GP800R 2001 2002 2003 2004 2005 2006 2007 2008 PWC Workshop Service Repair Manual WaverunnerSuzuki GZ 250 Marauder 1999-2009 Service Repair Workshop Manual 2000 2001 2002 2003 2004 2005 2006 2007 2008SUZUKI GZ250 1999-2009 WORKSHOP REPAIR MANUAL 2000 2001 2002 2003 2004 2005 2006 2007 2008Yamaha VStar 1100 XVS1100 Workshop Manual 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009Renault Twingo 1, Twingo 2 1992-2013 Workshop Repair Service Manual 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012Ford Ranger 1998-2009 Workshop Manual 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008MAZDA BRAVO DRIFTER 1998-2009 Workshop Repair Service Manual 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008Suzuki DRZ400 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 Service Repair Workshop ManualSUZUKI DRZ400S 2000-2009 WORKSHOP REPAIR MANUAL 2001 2002 2003 2004 2005 2006 2007 2008RENAULT MASTER 1997-2008 WORKSHOP MANUAL 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007Ford Ranger 1998-2010 Service Repair Workshop Manual 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009Suzuki DR-Z250 2001-2009 Service Repair Workshop Manual 2002 2003 2004 2005 2006 2007 2008Polaris Sportsman 90 2001-2012 ATV Service Repair Workshop Manual 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011Polaris Scrambler 500 1997-2012 ATV Service Repair Workshop Manual 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011.Alfa Romeo 166 1998-2008 Workshop Service Manual 1999 2000 2001 2002 2003 2004 2005 2006 2007SUZUKI GS500 GS500E GS500F 1989-2009 WORKSHOP REPAIR MANUAL 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008SUZUKI GS500 GS500E GS500F 1989-2009 TECHNICAL WORKSHOP MANUAL 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008Suzuki GS500 GS500E GS500F Workshop Manual 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 Yamaha XVS650 Drag Star 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 Workshop Repair ManualYAMAHA VSTAR 650 XVS650 1997-2008 WORKSHOP REPAIR MANUAL 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007Yamaha XVS 650 DRAG STAR 1997-2008 Motorcycle Workshop Repair Service Manual 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007Suzuki GS500E GS500 GS500F 1989-2009 Service Repair Workshop Manual 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008Yamaha V-Star-1100 1999-2009 Workshop Service Repair Manual 2000 2001 2002 2003 2004 2005 2006 2007 2008Suzuki DR200 SE 1996-2009 Service Repair Workshop Manual 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008Suzuki VS700 VS750 VS800 S50 1985-2009 Workshop Service Repair Manual 1986 1987 1988 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008Yamaha TRAILWAY TW200 2001 2002 2003 2004 2005 2006 2007 2008 2009 Service Owners Workshop Shop Repair ManualYamaha TW 200 TRAILWAY 1987-2012 Service Repair Workshop Manual 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011Yamaha VStar 1100 XVS1100 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 motorcycle Service Repair Workshop ManualYAMAHA V STAR 1100 XVS1100 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 TECHNICAL WORKSHOP MANUALYAMAHA 650 V STAR 1998-2009 WORKSHOP REPAIR MANUAL 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008YAMAHA V STAR 650 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 TECHNICAL WORKSHOP MANUALYamaha Raptor 80 2001 2002 2003 2004 2005 2006 2007 2008 Service RepairWorkshop Manual1999-2001 Subaru Impreza WRX Workshop Service Repair Manual Download 1999 2000 20011996-2001 Mitsubishi Colt Lancer Service Repair Workshop Manual DOWNLOAD 1996 1997 1998 1999 2000 20012001-2002 Mitsubishi Lancer EVO 7 Service Repair Workshop Manual DOWNLOAD 2001 20021996-2001 Yamaha XVZ13A AC AT ATC LT LTC RoyalStar Workshop Service Repair Manual DOWNLOAD 1996 1997 1998 1999 2000 20012001-2005 Yamaha Xlt1200 Waverunner Workshop Service Repair Manual DOWNLOAD 2001 2002 2003 2004 20052001-2003 Husaberg Engine Workshop Service Repair Manual DOWNLOAD 2001 2002 20031998-2001 Yamaha PZ500C VT500XLC Snowmobile Workshop Service Repair Manual DOWNLOAD 1998 1999 2000 20012001-2005 Yamaha VK540EF VK540III Snowmobile Workshop Service Repair Manual DOWNLOAD 2001 2002 2003 20042001-2003 Yamaha YJ50 Vino Service Repair Workshop Manual DOWNLOAD (2001 2002 2003)1996-2001 Suzuki XF650 Freewind Motorcycle* Factory Service / Repair/ Workshop Manual Instant Download! - Years 1996 1997 1998 1999 2000 20012001-2003 Ssangyong Rexton Service Repair Workshop Manual DOWNLOAD (2001 2002 2003)1992-2001 Johnson Evinrude All V Engine 65Jet-300HP V4,V6,V8 Outboard Workshop Service Repair Manual DOWNLOAD 1992 1993 1994 1995 1996 1997 1998 1999 2000 20011990-2001 Johnson Evinrude 1.25HP-70HP 1-4 Cylinder 2 & 4 Stroke Outboard Workshop Service Repair Manual DOWNLOAD 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001Mazda Millenia 1996-2003 Automobile Service Repair Workshop Manual 1997 1998 1999 2000 2001 2001 2002Kawasaki 1400 GTR Concours 14 Service Manual 2008-20092008 Kawasaki ZG1400 1400GTR Concours14 ABS Concours14 Service Repair Manual DOWNLOAD2008 Kawasaki Ninja ZX-10R ZX1000 Service Repair Manual Download2008-2009 Kawasaki Ninja ZX-6R ZX600R9F Motorcycle Service Repair Manual DOWNLOAD2006-2008 Kawasaki KX450F Service Repair Manual DOWNLOAD2008 Kawasaki Ninja 250R Service Repair Manual Download2007-2011 Kawasaki Ninja 250R Service Repair Manual Download 2007 2008 2009 2010 20112004-2009 Kawasaki JetSki Watercraft STX-15F Service Repair Manual Download 2004 2005 2006 2007 2008 20092007-2009 Kawasaki JetSki Watercraft Ultra LX JT1500 Service Repair Manual DOWNLOAD 2007 2008 20092007-2008 Kawasaki Ninja ZX-6R ZX600 Service Repair Manual DOWNLOAD 07 08 Kawasaki KFX 450R Service Repair Manual 2008Kawasaki KVF 750 Brute Force Service Manual 20082007-2010 Kawasaki JetSki Ultra 250X Ultra 260X Ultra 260LX Watercraft JT1500 Service Repair Manual Download 2007 2008 2009 20102008 Kawasaki 1400GTR Service Repair Manual DOWNLOAD2008 Kawasaki EX250J8F Ninja 250R Service Repair Manual DOWNLOAD KAWASAKI NINJA 250 R 2007 - 2008 SERVICE Repair MANUALKAWASAKI Z 750 2007 - 2008 SERVICE Repair MANUAL Download KAWASAKI ZX-14 NINJA, ZZR 1400 2008 - 2011 SERVICE MANUAL KAWASAKI ZX-6R 2007 2008 SERVICE Repair MANUAL DownloadKawasaki X2-800 JF800A6F 2006 to 2008 Service Manual2008 Kawasaki Ninja ZX-10R Motorcycle Manual DownloadKawasaki KX125 kx250 Service Manual 2003-20082005-2008 Kawasaki KX250 2-Stroke Motorcycle Repair Manual2007-2008 Kawasaki Ultra 250X JetSki Watercraft Repair PDF2008 Kawasaki KVF750 Brute Force ATV Repair Manual Download。
NVIDIA Tegra Linux 驱动程序包 R21.4 发布说明说明书

DA_06297-R21 | July 10, 2015Advance Information | Subject to Change Detailed SW Feature ListDOCUMENT CHANGE HISTORYDA_06297-R21Version Date Authors Description of Changev1.0 10 May 2012 whsu / kstone Initial releaseUpdated for R16 release v2.0 09 Sep 2012 whsu / mzensius /alevinsonv3.0 21 May 2013 whsu / mzensius Updated for R16.3 releasev4.0 17 Sep 2014 whsu / mzensius Updated for R19.3 releasev5.0 26 May 2015 mzensius Updated for R21.3 releasev6.0 10-Jul-2015 emilyh Updated for R21.4 releaseTABLE OF CONTENTS NVIDIA TEGRA LINUX DRIVER PACKAGE DETAILED FEATURE LIST (4)Processor (5)Tool Chain (5)Linux GStreamer (0.10/1.0) Framework (5)Linux Audio (9)Kernel (9)Power Management (9)I/O Interfaces (10)Board Support Package (BSP) (10)Boot Loaders (11)Multimedia (12)Display (12)Graphics and Display API Support (13)Decoders (13)Audio Decoders (13)Image Decoders (14)Video Decoders (14)Encoders (16)Audio Encoders (16)Image Encoders (16)Video Encoders (16)Container Formats (16)Reader Container Formats (Gstreamer) (16)Writer Container Formats (Gstreamer) (18)Streaming Protocols (18)This document provides a detailed list of features implemented in the NVIDIA® Tegra®Linux Driver Package.Tegra Linux Driver Package (L4T) supports the Jetson TK1 reference platform.Here are some guidelines for reading the information in this document:④Platform support—unless otherwise specified in the Notes column, the feature issupported on all supported platforms.④Features with a note containing “Early-access feature” are provided for evaluation withlimited testing and are subject to change.Feature OverviewThis document contains tables for the following feature categories:④Tool Chain④Linux Gstreamer (0.10/1.0) Framework④Linux Audio④Kernel④Power Management④I/O Interfaces④Board Support Package (BSP)④Boot Loaders④Multimedia④Display④Graphics and Display API Support④Decoders④Encoders④Container Formats④Streaming Protocols④Display④Camera Application FeaturesPROCESSORSKU Supported Description NotesCD575M Duty Cycle Support:24 x 7 (Use Case 1)4/4/16 (Use Case 2)Refer to DatasheetCD575MI Duty Cycle Support:24 x 7 (Use Case 1)4/4/16 (Use Case 2)Refer to DatasheetNote: Refer to product documentation for software support to enable use cases. TOOL CHAINFeature Description NotesARM Cortex-A9 processor arm-cortex_a9-linux-gnueabi-GNU Compiler Collection gcc-4.5.3-glibc-2.11.3 -LINUX GSTREAMER (0.10/1.0) FRAMEWORKRefer to the Tegra Linux Driver Package Multimedia User Guide for detailed information on capabilities and use of hardware-accelerated plugins for Gstreamer.Note: Numbers in parentheses in the following table indicate the relevant version of Gstreamer.Feature Description NotesH.264/AVC Video Decoder nv_omx_h264dec(0.10)omxh264dec (1.0)skip-frames (0.10, 1.0)disable-dpb (1.0)MPEG-4 Video Decoder nv_omx_mpeg4dec(0.10)omxmpeg4videodec(1.0)skip-frames (0.10, 1.0)disable-dpb (1.0)VP8 Video Decoder nv_omx_vp8dec(0.10)omxvp8dec (1.0) skip-frames (0.10, 1.0) disable-dpb (1.0)H.263 Video Decoder nv_omx_h263dec(0.10)omxh263dec (1.0) skip-frames (0.10, 1.0) disable-dpb (1.0)JPEG Image Decoder nvjpegdec (0.10)nvjpegdec (1.0)idct-method (0.10, 1.0)H.264/AVC Video Encoder nv_omx_h264enc(0.10)omxh264enc (1.0)Bitrate (0.10)Quality-level (0.10)Rc-mode (0.10)Qp-range (0.10)Temporal-tradeoff (0.10)Bit-packetization (0.10)Low-latency (0.10)Framerate (0.10)Control-rate (1.0)Target-bitrate (1.0)Quant-i-frames (1.0)Quant-p-frames (1.0)Quant-b-frames (1.0)VP8 Video Encoder nv_omx_vp8enc(0.10)omxvp8enc (1.0) Bitrate (0.10)Quality-level (0.10)Rc-mode (0.10)Qp-range (0.10) Temporal-tradeoff (0.10) Bit-packetization (0.10) Low-latency (0.10) Framerate (0.10) Control-rate (1.0) Target-bitrate (1.0) Quant-i-frames (1.0) Quant-p-frames (1.0) Quant-b-frames (1.0)JPEG Image Encoder nvjpegeng (0.10)nvjpegenc (1.0) Quality (0.10, 1.0)Idct-method (0.10, 1.0)Video Sink, X11 Window nveglglessink (1.0) max-lateness (1.0)qos (1.0)async (1.0)ts-offset (1.0)last-sample (1.0)enable-last-sample (1.0)blocksize (1.0)render-delay (1.0)throttle-time (1.0)max-bitrate (1.0)show-preroll-frame (1.0)create-window (1.0)force-aspect-ratio (0.10, 1.0)Video Sink, Panel Overlay nv_omx_videosink(0.10)nvoverlaysink (1.0)x-scale (0.10)y-scale (0.10)overlay (0.10)overlay-depth (0.10)overlay-x (0.10)overlay-y (0.10)overlay-w[width] (0.10)overlay-h[height] (0.10rotation (0.10)display [name] (0.10)force-aspect-ratio (0.10)contrast (0.10)brightness (0.10)hue (0.10)saturation (0.10)max-lateness (0.10, 1.0)qos (0.10, 1.0)async (0.10, 1.0)ts-offset (0.10, 1.0)last-buffer (0.10)enable-last-buffer (0.10)last-sample (1.0)enable-last-sample (1.0)blocksize (0.10, 1.0)render-delay (0.10,1.0)throttle-time (0.10, 1.0)max-bitrate (1.0)show-preroll-frame (1.0)Video Sink, HDMI Overlay nv_omx_hdmi_videosink (0.10)nvhdmioverlaysink(1.0)x-scale (0.10)y-scale (0.10)overlay (0.10)overlay-depth (0.10)overlay-x (0.10)overlay-y (0.10)overlay-w[width] (0.10)overlay-h[height] (0.10rotation (0.10)display [name] (0.10)force-aspect-ratio (0.10)contrast (0.10)brightness (0.10)hue (0.10)saturation (0.10)max-lateness (0.10, 1.0)qos (0.10, 1.0)async (0.10, 1.0)ts-offset (0.10, 1.0)last-buffer (0.10) enable-last-buffer (0.10) last-sample (1.0) enable-last-sample (1.0) blocksize (0.10, 1.0) render-delay (0.10,1.0) throttle-time (0.10, 1.0) max-bitrate (1.0)show-preroll-frame (1.0)Format Conversion nvvidconv (0.10)nvvidconv (1.0) raw-yuv <-> nv-yuv (0.10)raw-yuv <-> nvrm-yuv (0.10)raw-gray <-> nv_yuv (0.10)raw-gray <-> nvrm-yuv (0.10)nv-yuv <-> raw-rgb (0.10)nvrm-yuv <-> raw-rgb (0.10)nv-yuv <-> raw-yuv (0.10)nvrm-yuv <-> raw-yuv (0.10)nv-yuv <-> raw-gray (0.10)nvrm-yuv <-> raw-gray (0.10)raw(yuv)<-> raw(yuv-memory:NVMM) (1.0) raw(gray)<-> raw(yuv-memory:NVMM) (1.0) raw(yuv-memory:NVMM)<-> raw(yuv) (1.0)raw(yuv-memory:NVMM)<-> raw(gray) (1.0)Video Scaling nvvidconv (0.10)nvvidconv (1.0) Input/Output formats supported: raw-yuv (0.10, 1.0)raw-gray (0.10, 1.0)nv-yuv (0.10)nvrm-yuv (0.10)raw-rgb (0.10, output only)Capture application, Gstreamer-based nvgstcapture-0.10nvgstcapture-1.0USB camera (0.10, 1.0)CSI camera (1.0)PreviewStill image captureVideo captureVideo playback application, Gstreamer-based nvgstplayer-0.10 nvgstplayer-1.0-Gstreamer CUDA Plugin Gst-videocuda (1.0)Gstreamer CUDA plugin implementationfor video post and preprocessing.LINUX AUDIOFeature Description NotesSystem sounds ALSA Driver -HDMI Audio - -Pulse Audio -Multi-instance audiodecodeKERNELFeature Description NotesLinux Kernel K3.10 -SMP - -CPU hot plug support - -System MMU - -System RAM - LPAE (equal to or greaterthan 4 GB) not supported POWER MANAGEMENTFeature Description NotesCPU DVFS - -EMC DVFS - --Low-power idle state Deep Sleep (LP0) andSuspend (LP1CPU auto hotplug - -4+1 CPU - -Thermal Management Description Notes- -External temperaturesensor (NCT1008)Dynamic thermal throttling Software with hardware-fail-safeLP1 support Description NotesWake with power button- -and RTCUltra-Low-Power Standby(LP0) Description NotesDRAM self-refresh Not enabled by default -Deep Sleep support - -- -USB Suspend during DeepSleepMiscellaneous features Description NotesPower off button support - -I/O INTERFACESFeature Description NotesDDR3L (Hynix 2 GB) - -USB0 Host USB 2.0 Micro-AB -USB0 (2.0) Device USB 2.0 Micro-AB -USB1 (2.0) Host Half-miniPCIe Socket -USB2 (2.0) Host USB 3.0 Type A -USB3 (3.0) Host USB 3.0 Type A -PCIe x1 (lane 2) RTL8111GS Ethernet -PCIe x1 (lane 4) Half-miniPCIe Socket -SATA SATA Connector -HDMI HDMI Connector -HDMI Hotplug detect HDMI Connector -CSI A/B (x4) General Expansion Header V4L2 API (ISP Bypass) SDMMC3 SDcard Socket -SDMMC4 eMMC -I2S1 (DAP2) Audio Codec (ALC5639) -GEN1_I2C (I2C1) Various -CAM_I2C (I2C3) General Expansion Header -DDC (I2C4) HDMI Connector -PWR_I2C (I2C5) PMU -UARTD Debug UART -JTAG - - BOARD SUPPORT PACKAGE (BSP)Feature Description NotesReal-time clock - -tty50 -8250 UART for debugconsolettyTHS0, ttyTHS0 ttyTHS2 -High-speed UART forperipheralsI2C master - -USB gadget Additional configuration-requiredUSB host - -USB Ethernet - -USB 2.0 host Default to MSC -USB 3.0 host - -USB mouse - -USB thumb drive - -- Framebuffer Console HDMI, eDP is tested withexpansion boardSDHCI driver for eMMC 4.5 - -External SD card support - -USB mass storage device Host mode only -Multi-touch screen No touch support - Headphone jack - -APB DMA - -SATA mSATA is supported -PMU Description NotesPWM backlight No backlight support -Battery charging (ADC) No battery charging -PMIC AMS (A53722) - -PMIC reset - -Sensors Description NotesGas gauge No gas gauge -Thermal monitor - -PCI-Express Description Notes-PCI device enumeration MiniPCi x1 with Real TekEthernet is supportedBOOT LOADERSBoot Loader Feature NotesFastboot Boot Device eMMCRoot Device USB, SD, eMMC, SATADisplay device UARTU-Boot Boot Device eMMC, EthernetRoot Device USB, SD, eMMC, NFSDisplay device UART-Update Utility Utility to configure bootloader parameters in BCTMULTIMEDIAAudio Notes Multi-instance audio decode - Multichannel playback -USB audio record -Video Notes Multi-Stream Video Encode - Video-only mode -4K playback -Media APIs Notes Gstreamer-0.10 - Gstreamer-1.0 -DISPLAYFeature Resolution Notes Supportedresolutions640 X 480 -Framebufferconsole deviceHDMI - Dual-display support HDMI + eDP -Primary display type/default resolution HDMI Default resolution 1920x 1080Secondary displaytype/resolutioneDP -Supported resolutions 640 X 480 - 720 X 576 - 1024 X 768 - 1280 X 720 - 1280 X 1024 - 1920 X 1080 - 3840 X 2160 - 4096 X 2160 -GRAPHICS AND DISPLAY API SUPPORTAPI Version NotesGLX 1.4 Compatible withOpenGLEGL 1.4 Compatible withOpenGL ES OpenGL 4.4 -OpenGL ES 3.1 -X11 ABI 15, 18, and 19 -Xrandr 1.4 - DECODERSAudio DecodersAudio Decode Profile SamplingFrequency Bit rate NotesAAC+ Mono and stereofor SBR; pluslimited support(described inNotes) formultichannelAAC+ (AAC+SBR) 8-48kilohertz(kHz)8-320kilobitspersecond(kbps)For multi-channelAAC+ (AAC+SBR)streams, only theAAC multi-channelis decoded. The 5.1channels are down-mixed to stereo.AAC-LC Mono and stereo;plus 5.1 channelsdown-mixed tostereo 8-48 kHz 8-320kbps-AAC-LC multichannel 6 channel [5.1] 8-48 kHz 8-320kbpsOutput over HDMIeAAC+ Stereo only 8-48 kHz 8-320kbps-AMR-NB 1 channel Up to 8 kHz 4.75-12.2kbps-AMR-WB 1 channel Up to 16kHz 6.6-23.85 kbps-MP3 2 channel 8-48 kHz 32-320kbps-MPEG-2 (MPEG-1 Layer 2)2 channel 16-48 KHz 8-320kbps-Vorbis Ogg Audio 8-48 KHz 32-256kbpsWAV linear PCM 16-bit, 2channels8-48 kHz - -Audio Decode Profile SamplingFrequency Bit rate NotesWAV multichannel support Multichannelsupport- - -WMA 9 * Standard 2-channel 8-48 kHz 8-384kbps-WMA Lossless * Lossless: Up toN1 Profile; WMA10: 2 channel8-48 kHz 8-384kbps-WMAPro LBR 10 * M2 Profile; 2channel16-96 kHz 8-768kbps-WMAPro LBR 10 multichannel * 6 channel [5.1] 16-96 kHz 8-768kbps-AC3/DTS (passthrough) Multichannelsupport8-48 kHz 8-320 -Notes* Use of this decoder requires a BSP add-on component available only to customers with Windows Media Component licensing. For more information see/wmcomponents/.Image DecodersImage Decode NotesLibjpeg-8b acceleration with TegraJPEG Decode HW -Video DecodersVideo Decode Profile and Level Sampling Frequencyand Bit Rate/Frame NotesAVCHD MPEG-4AVC/H.264/VC11080/60i Highdef Up to 1080p60 fpsUp to 10 MbpsNo support for AVH-DC stereoscope (3D)DivX 4/5/6 compatible 1080p Highdef Up to 1080p30 fpsUp to 10 MbpsNo QPEL;No interlace;No GMCDivX 4/5/6 compatible PlusHD Up to 1080p30 fpsUp to 20 Mbps-H.263 Baseline(Profile 0) Standard H.263 pictureformats up to 4CIF30 fpsUp to 8 MbpsStandard H.263picture formats =SQCIF, QCIF, CIF,4CIFVideo Decode Profile and Level Sampling Frequencyand Bit Rate/Frame NotesH.264 AVC Baseline ProfileHigh Profile@ L4.2 Up to 1080p @96 fpsUp to 62.5 Mbps-H.264 AVC Baseline ProfileHigh Profile@ L4.2 Up to 1440p @48 fpsUp to 62.5 Mbps-MJPEG YUV 420/YUV 422 Up to 1080p30 fps-MPEG-2 Video Main Profile@ High Level Up to 1080p 30 fps/1080i 60 fpsUp to 80 Mbps-MPEG-2 Video Main Profile@ High Level Up to 720p60 fpsUp to 80 Mbps-MPEG-4 Advanced SimpleProfile@ L5 Up to 1080p30 fpsUp to 10 MbpsNo QPEL;No interlace;No GMCMVC Multiview HighProfile, StereoHigh Profile Up to 1080p24 fpsUp to 32 MbpsLocal playback andplayback over HDMIVC-1/WMV * Simple Profile@ ML Up to 1080p @ 48 fpsUp to 1080i @ 96 fpsUp to 45 Mbps-VC-1/WMV * Main Profile@ HL Up to 1080p @ 48 fpsUp to 1080i @ 96 fpsUp to 45 Mbps-VC-1/WMV * Advanced Profile@ Level 3 Up to 1080p @ 48 fpsUp to 1080i @ 96 fpsUp to 45 Mbps-Xvid Xvid Highdef Up to 1080p30 fpsUp to 10 Mbps No QPEL; No interlace; No GMCHEVC ***********Up to 1080p30 fpsUp to 8 Mbps-VP8 Version 0, 1, 2 Up to 1080p @60 fpsUp to 60 MbpsUp to 2160p @ 24 fpsUp to 62.5 Mbps-Notes* Use of this decoder requires a BSP add-on component available only to customers with Windows Media Component licensing. For more information see/wmcomponents/.ENCODERS Audio EncodersAudio Encode Profile SamplingFrequency Bit rate NotesAAC-LC - 8-48 kHz Up to 320kbps- Image EncodersImage Encode Profile Resolution Bit rate Notes Libjpeg-8bacceleration withTegra JPEGEncodeHWExif Up to 14 MP Q-100 - Video EncodersVideo Encode Profile andLevelSampling FrequencyandBit rate/Frame rate NotesH.264 Baseline ProfileMain ProfileHigh Profile@ L4.2Up to 1080p60 fpsUp to 50 MbpsVBR/CBR-VP8 Version 0 Up to 1080p60 fpsUp to 60 MbpsH.263 Baseline Profile - -MPEG-4 Simple Profile - - CONTAINER FORMATSReader Container Formats (Gstreamer)Codecs are provided by GStreamer. You can download GStreamer codecs from the gstreamer opensource project at:Or you can use apt-get in the provided Ubuntu-derived sample file system.The following table presents container information. See container specifications for audio/video pairing within the container.ASF (WMV) (Gstreamer) Description NotesVideo VC-1 -Audio WMA 10, WMA Pro, WMA-LosslessAVI (Gstreamer) Description NotesVideo MPEG-4, H.264, DivX/Xvid --Audio AAC, AAC+, eAAC+, MP3,MPEG-2, AC3MPEG-4(MP4)/3G2/3GP/MOV(Gstreamer) Description NotesVideo MPEG-4, H.264, H.263 --Audio AAC, AAC+, eAAC+, AMR-NB, AMR-WBMatroska (MKV)(Gstreamer) Description NotesVideo MPEG-4, DivX/Xvid, H.264 --Audio AAC, AAC+, eAAC+, MP3,AC3WebM (Gstreamer) Description NotesVideo VP8 -Audio Vorbis -OGG (Gstreamer) Description NotesAudio Vorbis -MP3 (Gstreamer) Description NotesAudio MP3 -M2TS/MPEG-TS(Gstreamer) Description NotesVideo H.264, VC-1, MPEG-2 -Audio AAC, AAC+, eAAC+ -Writer Container Formats (Gstreamer)The following table presents container information. See container specifications foraudio/video pairing within the container.MPEG-4 (MP4)/3GP(Gstreamer) Description NotesVideo MPEG-4, H.264, H.263, VP8 --Audio Audio: AAC AMR-NB, AMR-WBStreaming (Gstreamer) Description NotesHTTP1.0 MP3, MP4, 3GP,WMA,-WMV, AVI, ASFHTTP 1.1 MP3, MP4, 3GP,WMA,-WMV, AVI, ASFRTSP (Gstreamer) Description Notes-RFC 2326 Real Time StreamingProtocol (RTSP)RFC 2429 H.263 -RFC 3016 AAC-LC, AAC+, eAAC+,-MPEG-4RFC 3267 AMR-NB --RFC 3550 RTP: A TransportProtocolfor Real-TimeApplications-RFC 3640 AAC-LC, AAC+,eAC+,MPEG-4RFC 3984 MPEG-4 AVC/H.264 -STREAMING PROTOCOLSStreaming protocols are provided by GStreamer. You can download GStreamer codecs from the gstreamer opensource project at:Or you can use apt-get in the provided Ubuntu-derived sample file system. Hardware codecs are not included in the base release but can be provided separately under a software license agreement.HTTP Protocols* FormatsHTTP 1.0 3GPAACASFAVIMKVMOVMP3MP4TSWMAWMVHTTP 1.1 3GPAACASFAVIMKVMOVMP3MP4TSWMAWMVHTTP Chunked Mode Support NotesChunked Mode Support Chunked Mode Data Transfer with HTTP 1.1 onlyHTTP Streaming NotesLive Streaming -RTSP Protocols* NotesRFC 2326 Real Time Streaming Protocol (RTSP)RFC 2429 H.263RFC 3016 AAC-LC, AAC+, eAAC+, MPEG-4RFC 3267 AMR-NBRFC 3550 RTP: A Transport Protocol for Real-TimeApplicationsRFC 3640 AAC-LC, AAC+, eAAC+, MPEG-4RFC 3984 MPEG-4 AVC/H.264-Buffer control withwatermarking for RTSPstreamingSDP Session Set Up* NotesRFC 4566 Session Description ProtocolNotes* For better user experience, NVIDIA recommends limiting HTTP, RTSP, and RTP streaming tests to 1080p 30 fps 10 Mbps content over a sustained network with a bandwidth of greater than 16 Mbps.NoticeALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATELY, "MATERIALS") ARE BEING PROVIDED "AS IS." NVIDIA MAKES NO WARRANTIES, EXPRESS, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND ALL EXPRESS OR IMPLIED CONDITIONS, REPRESENTATIONS AND WARRANTIES, INCLUDING ANY IMPLIED WARRANTY OR CONDITION OF TITLE, MERCHANTABILITY, SATISFACTORY QUALITY, FITNESS FOR A PARTICULAR PURPOSE AND ON-INFRINGEMENT, ARE HEREBY EXCLUDED TO THE MAXIMUM EXTENT PERMITTED BY LAW.Information furnished is believed to be accurate and reliable. However, NVIDIA Corporation assumes no responsibility for the consequences of use of such information or for any infringement of patents or other rights of third parties that may result from its use. No license is granted by implication or otherwise under any patent or patent rights of NVIDIA Corporation. Specifications mentioned in this publication are subject to change without notice. This publication supersedes and replaces all information previously supplied. NVIDIA Corporation products are not authorized for use as critical components in life support devices or systems without express written approval of NVIDIA Corporation.TrademarksNVIDIA, the NVIDIA logo, and Tegra are trademarks or registered trademarks of NVIDIA Corporation in the United States and other countries. Other company and product names may be trademarks of the respective companies with which they are associated.HDMI, the HDMI logo, and High-Definition Multimedia Interface are trademarks or registered trademarks of HDMI Licensing LLC.ARM, AMBA, and ARM Powered are registered trademarks of ARM Limited. Cortex, MPCore and Mali are trademarks of ARM Limited. All other brands or product names are the property of their respective holders. "ARM" is used to represent ARM Holdings plc; its operating company ARM Limited; and the regional subsidiaries ARM Inc.; ARM KK; ARM Korea Limited.; ARM Taiwan Limited; ARM France SAS; ARM Consulting (Shanghai) Co. Ltd.; ARM Germany GmbH; ARM Embedded Technologies Pvt. Ltd.; ARM Norway, AS and ARM Sweden AB.Copyright© 2013 - 2015 NVIDIA Corporation. All rights reserved.。
毒鸟汽车品牌产品名型号文件说明书

Immobilizer (blinks):
Use correct key
5
*models with navigation only
On/Off Indicators
PASSENGER AIRBAG OFF
(located on center panel)
SIDE AIRBAG OFF
VSA OFF CRUISE MAIN on
CRUISE CONTROL on
Bed lights on Headlights on Turn signals/hazards on High beams on
5
On/Off Indicators
Parking brake on: Release
Condition IndicatoSFreasasttebenltsreeamt ibndeeltr(:s)
PDCP(alAoolrockoSasiSrtnee/EgTdNdaboiorGlngaoaEkcreteRe(nostAeo)nrI/p:RtpeaBaninAlA:egGlc)attOieonFFis
management 4WD)
Condition Indicators
BriePRfaerllkyeinagseabrpakepoCLLen:ooahwArwactrwioogntiiiiistnrlnhegepederpsedeayrbscseysthdsrueSFsievameearustrtenebrenelgtsrei:eanmtiebndeeltsr(:st)art. Red and ambeSVrISAMDAMEiOBnAaIFaRdlSFfBiuiAnc(GntaaOecntFttnoFii-aorlonsnccaklearbmeMrapmikne(odcshseHTyueterrsancdt:cslkeiiggrhnmetaisltnso)/ihngcaiznaardels.olBinglhut)e
FCA US LLC车辆扫描工具说明书

SCAN TOOL POSITION STATEMENTFCA US LLC vehicles, systems and components are engineered, tested and manufactured to help protect vehicle occupants. They are engineered to meet or exceed both government-mandated and internal corporate requirements relative to durability, NVH (noise vibration and harshness) and vehicle safety. Use of the Mopar®wiTECH vehicle diagnostic tester (Mopar Scan Tool) is an important part of FCA US vehicle service and maintenance. This tool contains software that aftermarket tools may not contain and can assess whether any FCA US vehicle’s safety and security systems contain active or stored Diagnostic Trouble Codes (DTCs).Safety and security-related systems, such as antilock brakes, supplemental restraint systems (SRS - airbags), occupant restraint controller (ORC), seat belts, active head restraints, forward facing camera and radar, blind spot monitoring, and other automated electronic driver assistance systems, MUST be tested for fault codes (DTCs) that could be active (current) or stored following a collision. Use of the Mopar wiTECH vehicle diagnostic tester is necessary before and after collision repair.ANY of the following conditions could trigger DTCs prior to or during collision repairs, which could result in improper vehicle performance: u Vehicle is involved in an accident or collision, even though the damage may appear minoru Vehicle has been in an accident with or without airbag deploymentu Voltage loss, including battery disconnects and hybrid battery disablingu Significant vehicle disassembly including, but not limited to, bumpers, door handles, headlamps and mirrorsu Interior trim repair or removalu Glass removal and replacement operationsAny repairs performed without using Mopar parts and not following published repair guidelines and procedures may expose current or future vehicle owners and occupants to unnecessary risk.If faults were stored in the DTC memory for any safety or security system, then these systems MUST be serviced according to the repair procedures in Service Information. After performing repairs, recheck the system to determine if any active or stored DTCs remain; if so, take appropriate service action to ensure proper function.SRS AIRBAG SQUIB STATUSMultistage airbags with multiple initiators (squibs) MUST be checked to determine that all squibs were used during the deployment event. The driver airbag (DAB) and passenger airbag (PAB) are deployed by electrical signals generated by the occupant restraint controller (ORC) through the driver or passenger squib circuits (up to 3) to the initiators in the airbag inflators. Typically, all initiators are exhausted and all potentially hazardous chemicals are burned during an airbag deployment event.However, it is possible for only one initiator to be exhausted; therefore, you MUST always confirm that all initiators have been cycled to minimize the risk of improper handling or disposal of potentially live pyrotechnic or hazardous materials. This procedure must be performed using the Mopar wiTECH diagnostic scan tool or at a company such as Collision Diagnostic S ervices that diagnostically remotely scans the vehicle using FCA US scan tools in conjunction with their patented asTech device, to verify the status of all airbag squibs, prior to removing deployed airbags from the vehicle for disposal.u Service Information can be obtained at uMopar wiTECH scan tools can be purchased from https:///Pdf/WiTechOrderForm.pdf©。
潃斯卡车型号XXX的用户手册说明书
CONTINUEDBatteryCharging System...........................Indicator . 52, 242............................Jump Starting .238..............................Maintenance .226............................Specifications .257..............................Before Driving .163....................................Belts,Seat .8,19...........................Beverage Holder .106Brakes...........Anti-lock System (ABS).189.............Break-in,New Linings .164...........................................Fluid .211.......................................Parking .103.................System Indicator . 52, 244........................Wear Indicators .188.............................Braking System .188..Brightness Control,Instruments .75........................Brights,Headlights .74Bulb Replacement.................................Fog Lights .213............Turn Signal Lights . 214, 215..............................Bulbs,Halogen .213............................Capacities Chart .256.............Carbon Monoxide Hazard .46............................Carrying,Cargo .171Cassette Player............................................Care .138...................................Operation .136..............CAUTION,Explanation of .ii ..................................Ceiling Light .104........................Certification Label .254...................................Chains,.225...Accessories and Modifications . 168................................Accessories .169............................Modifications .170ACCESSORY (Ignition Key.......................................Position).80............Accessory Power Sockets .106................Adding Engine Coolant .207........................Adding Engine Oil .204....................Additives,Engine Oil .205...............................Airbag (SRS) . 9, 22...............Additional Information .22......................................Servicing .28...................System Components .22..............Air Conditioning System .110.......................Air Pressure,Tires .221......................................Antifreeze .207Anti-lock Brakes (ABS)...............................Indicator . 53, 189...................................Operation .189..............Anti-theft,Audio System .140.Anti-theft Steering Column Lock .80................................Audio System .117...Automatic Lighting Off Feature .76...Automatic Seat Belt Tensioners .20.............Automatic Speed Control .142..............Automatic Transmission .181..........................Capacity,Fluid .256...............Checking Fluid Level .209.......................................Shifting .181.Shift Lever Position Indicator .181.......................................Shifting .181....................Shift Lock Release .185tires ABCISpecifications.............................257Break-in,New Vehicle..................164Back-up Lights (216)..............................Economy,Fuel .168............Emergencies on the Road .229.............Battery,Jump Starting .238...........Brake System Indicator .244................Changing a Flat Tire .231.....Charging System Indicator .242..................Checking the Fuses .245.........Hazard Warning Flashers .76Changing Oil ........................................How to . 205......................................When to .195....................Changing a Flat Tire .231...Charging System Indicator . 52, 242............Checklist,Before Driving .176..................Childproof Door Locks .84.....................................Child Safety .29..............................Booster Seats .43...................................Child Seats .36..........................................Infants rge Children TCH .38......................Risks with Airbags .30.............................Small Children .35.........................................Tethers .41.........Where Should a Child Sit?.30Cleaning.................................Floor Mats .218...................................Seat Belts .218...............Climate Control System .115..............................................Clock .103..........................CO in the Exhaust .46.................Console Compartment .107...............Consumer Information .265.............Controls,Instruments and .49Coolant........................................Adding .207....................................Checking .167.........................Proper Solution .207...................Temperature Gauge .57Crankcase Emissions Control........................................System .260................Cruise Control Indicator .54............Cruise Control Operation .142...................................Cup Holders .106..........Customer Relations Office .266................DANGER,Explanation of .ii ...................................Dashboard . 2, 50................Daytime Running Lights .74.Daytime Running Light Indicator .55............Defects,Reporting Safety .268................Defogger,Rear Window .77..............Defrosting the Windows .114....................................Dimensions .256...............Dimming the Headlights .74Dipstick..........Automatic Transmission .209..................................Engine Oil .167..........................Directional Signals .74........Disc Brake Wear Indicators .188.................................Disc Changer .129...Disc Changer Error Messages .135.....................Disposal of Used Oil .206Doors..............................Monitor Light .60......................Power Door Locks .82..........DOT Tire Quality Grading .258...........Driver and Passenger Safety .5...........................................Driving .175....................................Economy .168Driving Position Memory..........................................System .93tire DEIICompact Spare, (230)CONTINUED......................................Front Seats .90......................................Adjusting .90.........................................Heaters .96.....................................Airbags . 9, 22.................................................Fuel .164......................Fill Door and Cap .165...........................................Gauge .57................Octane Requirement .164........................Reserve Indicator .56........................Tank,Filling the .165.....................Fuses,Checking the .245......If Your Vehicle Gets Stuck . 249............................Jump Starting .238.....Low Oil Pressure Indicator .242...Malfunction Indicator Lamp .243..................Overheated Engine .240.......................................Towing .249.........................Emergency Brake .103......................Emergency Flashers .76......................Emergency Towing .249............Emergency Trunk Opener .84.......................Emissions Controls .260.............Emissions Testing,State .263Engine....Coolant Temperature Gauge .57Malfunction Indicatormp . 52, 243.........................................Oil Life .64........Oil Pressure Indicator . 52, 242..............Oil,What Kind to Use .204...............................Overheating .240............................Specifications .257....................Speed Limiter . 179, 185.......................................Starting .177...................Engine,.236......................Ethanol in Gasoline .164.Evaporative Emissions Controls .260...............Gas Mileage,Improving .168.........................................Gasoline .164...............Fuel Reserve Indicator .56...........................................Gauge .57................Octane Requirement .164........................Tank,Filling the .165................Gas Station Procedures .165if it won’t start GIII.................Jacking up the Vehicle .232.......................................Jack,Tire .231................................Jump Starting .238...Identification Number,Vehicle .254Ignition..............................................Keys .79...........................................Switch .80............Timing Control System .261........................Immobilizer System .81.........Important Safety Precautions .6.........................................Indicators .52......ABS (Anti-Lock Brake) . 53, 189Brake (Parking and Brake ............................System) . 52, 244................Charging System . 52, 242.............................Cruise Control .54DRL (Daytime Running......................................Lights).55.....................................Fog Light .56...................................High Beam .55........Key (Immobilizer System).56......................................Low Fuel .56................Low Oil Pressure . 54, 242...........................Side Airbag Off .53.........................................SRS . 26, 53Turn Signal and Hazard...................................Warning .55............................VSA Activation .54.................................VSA System .54...............................Infant Restraint .34......................................Infant Seats .34..........Tether Anchorage Points .41...................Inflation,Proper Tire .221...................................Inside Mirror .91.............................Inspection,Tire .222............................Instrument Panel .51..........Instrument Panel Indicators .52........Instrument Panel Brightness .75...............................Interior Lights .104........................................Introduction .i.......................Halogen Fog Bulbs .213..............Hazard Warning Flashers .76........................................Headlights .74........................................Aiming .213Automatic Lighting Off.....................................Feature .76............Daytime Running Lights .74..................High Beam Indicator .55.........................Reminder Chime .74...................................Turning on .74..............................Head Restraints .89.................High-Low Beam Switch .74HomeLink Universal................................Transceiver .145.......................Hood,Opening the .166Gauges ...Engine Coolant Temperature . 57...............................................Fuel .57...............................Speedometer .57.................................Tachometer .57Gearshift Lever Positions..........Automatic Transmission .1816-speed Manual.........................Transmission .178......................................Glove Box .107HIJIV70, 149HandsFreeLink (HFL).............CONTINUED...Octane Requirement,Gasoline .164.........................................Odometer .62...............................Odometer,Trip .62Oil........................Change,How to .205......................Change,When to .195......................Checking Engine .167..............Pressure Indicator . 52, 242Selecting Proper Viscosity......................................Chart .204...........ON (Ignition Key Position).80..................................................Keys . 79...............Keyless Memory Setting .66...................Neutral Gear Position .182..................New Vehicle Break-in .164...................NOTICE,Explanation of .i ...............Numbers,Identification .254..................................Maintenance .193.....................................Messages .64........................................Minder .195...Owner Maintenance Checks .198........................................Record .200..........................................Safety .194Malfunction Indicatormp . 52, 243...................Manual Transmission .178........Manual Transmission Fluid .210.............Memory,Driving Position .93...............................Meters,Gauges .57..........................Mirrors,Adjusting .91...............Modifying Your Vehicle .170.......................................Moonroof .100.............Multi-Information Display .59............................Engine Oil Life .64..........................HandsFreeLink .70.........Keyless Memory Settings .66.............Maintenance Messages .64.................Outside Temperature .63............................Trip Computer .65...................................Trip Meter .62bel,Certification ne Change,Signaling p/Shoulder Belts .19Lights....................Bulb Replacement .213.......................................Indicator .52.........................................Parking .74..................................Turn Signal .74.....................................Load Limit .172......LOCK (Ignition Key Position).80........................Lockout Prevention .82Locks.......Anti-theft Steering Column .80..................................Glove Box .107.................................Power Door .82...........................................Trunk .83........................Low Coolant Level .167...Low Oil Pressure Indicator . 52, 242...Lubricant Specifications Chart .256..............Luggage, . 171Storing (Cargo)KLNOMVOdometer (62)Onboard Refueling Vapor....................................Recovery . 260..............................Outside Mirrors .91.....................Outside Temperature .63....................Overheating,Engine .240....Owner’s Maintenance Checks .198...................Radiator Overheating .240Radio/Cassette/Disc Sound........................................System .117...................Readiness Codes . 243, 263..Rear Lights,Bulb Replacement .215..........................Rear Seat Armrest .89............................Rear View Mirror .91.................Rear Window Defogger .77.............................Reminder Lights .52................Remote Audio Controls .139.......................Remote Transmitter .85Replacement Information................Engine Oil and Filter .205..........................................Fuses .245................................Light Bulbs .213...........................................Tires .224.............................Wiper Blades .219Replacing Seat Belts After a............................................Crash .21...Reserve Tank,Engine Coolant .167.........................Restraint, Child . 34, 35..................Reverse Gear Position .182................................Rotation,Tire .223..................................Safety Belts . 8, 19.........Safety Defects,Reporting .268.................................Safety Features .7...........................................Airbags .9..................................Door Locks .11..........................Head Restraints .13.......................................Seat Belts .8.............Safety Labels,Location of .47...............................Safety Messages .ii ................................Satellite Radio .124.....................................Seat Belts . 8, 19...............Additional Information .19..............Panel Brightness Control .75........................Park Gear Position . 182...........................................Parking .187...............................Parking Brake .103Parking Brake and Brake System ...............................Indicator . 52, 244.................................Parking Lights .74..Parking Over Things that Burn .187.............................PGM-FI System .261...............Power Socket Locations .106.........Pregnancy,Using Seat Belts .17.........Protecting Adults and Teens .11...Additional Safety Precautions .18.....Advice for Pregnant Women .17........................Protecting Children .29Installing a Child Seat Usingtch .38Installing a Child Seat with ap/Shoulder Belt .40Installing a Child Seat with a......................................Tether .41.................Selecting a Child Seat .36.......................Protecting Infants .34.......Protecting Larger Children .42.........Protecting Small Children .35..................Protecting Your Discs .134PRSVI................88Reclining the Seat-backs Seats and Seat-backs. (12)CONTINUED.Taking Care of the Unexpected .229....................................Tape Player .136Technical Descriptions......DOT Tire Quality Grading .258.....Emissions Control Systems .260Three Way Catalytic...............................Converter .262.......................Temperature Gauge .57....................Temperature,Outside .63........Temperature,Inside Sensor .116..............Tether Anchorage Points .41..Three Way Catalytic Converter .262..................Tilt the Steering Wheel .78.....................................Cleaning . p/Shoulder Belt . 14, 19................................Maintenance .21Reminder Light and................................Beeper . 19, 52...................System Components e During Pregnancy .17....................................Seat Heaters .96........................Seats,Adjusting the .90............................Security System .141........Sequential SportShift Mode .183...............................Serial Number .254...........................Service Intervals .195...........................Service Manual .269.........Service Station Procedures .165..........................Setting the Clock .103.....Shift Lever Position Indicator .181........................Shift Lock Release .185...........................................Shifting .181................................Side Airbags . 9, 25........Side Airbag Off Indicator . 27, 53......................Side Curtain Airbags .26...............................Signaling Turns .74.....................................Snow Tires .225................................Sound System .117Spare Tire......................................Inflating .230............................Specifications .257....................Specifications Charts .256................................Speed Control .142..........SRS,Additional Information .33...Additional Safety Precautions .28....................Airbag Components .22.............................Airbag Service .28How the SRS Indicator.......................................Works .26How Your Front Airbags.........................................Work .23...How Your Side Airbags Work .25How Your Side Curtain Airbags .........................................Work .26.............................SRS Indicator .26,53....START (Ignition Key Position).80.......................Starting the Engine .177................With a Dead Battery .238..............State Emissions Testing .263........Steam Coming from Engine .236Steering Wheel..................................Adjustment .78.............Anti-theft Column Lock .80...................Stereo Sound System .117....................Storing Your Vehicle .227........................Sunglasses Holder .108......................................Servicing .28...............................SRS Indicator .26...................System Components .22TVII.....................224 Supplemental Restraint System.....22Summer Tires.........Unexpected,Taking Care..........................................of the .229....Uniform Tire Quality Grading .258........................Unleaded Gasoline ed Oil,How to Dispose of .206.................Vehicle Capacity Load .172......................Vehicle Dimensions .256....Vehicle Identification Number .254Vehicle Stability Assist (VSA)....................................System .190........VSA System Indicator . 54, 190...VSA Activation Indicator . 54, 190.........................VSA Off Switch .191.............................Vehicle Storage .227.................................................VIN .254..................................Viscosity,Oil .204.............WARNING,Explanation of .ii .........Warning Labels,Location of .47..................Warranty Coverages .267Washer,Windshield........Checking the Fluid Level .208.......................................Indicator .62.....................................Operation .73Wheels...............Adjusting the Steering .78............Alignment and Balance pact Spare .230Windows...........................Rear,Defogger .77..........................Time, Setting the . 103....................................Tire Chains .225.........Tire,How to Change a Flat .231...............................................Tires .220..............................Air Pressure .221.........................Checking Wear pact Spare .230......DOT Tire Quality Grading .258......................................Inflation .221..................................Inspection .222...................................Replacing .224......................................Rotating .223...........................................Snow .225............................Specifications .257.............................Summer Tire .224.......................Traction Devices .225..........................Winter Driving .224...................Tools,Tire Changing .231Towing.....................................A Trailer .192................Emergency Wrecker .249...........................Traction Devices .225TransmissionChecking Fluid Level,..............................Automatic .209.Checking Fluid Level Manual .210..................Fluid Selection . 209, 210..............Identification Number .254.............Shifting the Automatic .190..................Shifting the Manual .178.............................Treadwear . 223, 258................................Trip Computer .65.......................................Trip Meter .62................................................Trunk .80........Emergency Trunk Release .84.................................Opening the .83...................Open Monitor Light .60....................................Turn Signals .74UVWVIIIOperating the Power (97)Windshield.......................................Cleaning . 73...................................Defroster .114.....................................Washers .208Wipers,Windshield.......................Changing Blades .219.....................................Operation .73....................................Worn Tires .223.....Wrecker,Emergency Towing .249XIX:U.S.onlyXM Satellite Radio (124):Canada only。
depthmap使用手册

31.131Abstract Here we present Depthmap, a program designed to perform visibility graph analysis of spatial environments. The program allows a user to import a 2D layout in drawing exchange format (DXF), and to fill the open spaces of this layout with a grid of points. The user may then use the program to make a visibility graph representing the visible connections between those point locations. Once the graph has been constructed the user may perform various analyses of the graph, concentrating on those which have previously been found to be useful for spatial description and movement forecasting within the Space Syntax literature. Some measures which have not received so much mainstream attention have also been imple-mented. In addition to graph analysis, a few sundry tools are also enabled so that the user may make minor adjustments to the graph. Depthmap has been implemented for the Windows 95/98/NT and 2000 platforms.1 IntroductionThe application of visibility graph analysis (VGA) to building environments was first intro-duced by Braaksma and Cook (1980). Braaksma and Cook calculate the co-visibility of vari-ous units within an airport layout, and produce an adjaceny matrix to represent these relation-ships, placing a 1 in the matrix where two locations are mutually visible, and a 0 where they are not. From this matrix they propose a metric to compare the number of existing visibility relationships with the number which could possibly exist, in order to quantify how usefully a plan of an airport satisfies a goal of total mutual visibility of locations. This type of analysis was recently rediscovered by Turner et al. (Turner and Penn, 1999; Turner et al., 2001), through considering recent developments in Space Syntax of various isovist approaches (see Hanson,1998, for further background). They recast the adjaceny matrix as a visibility graph of loca-tions, where a graph edge connects vertices representing mutually visible locations. Turner et al. then use several graph metrics as a few representative measures which could be performed on such graphs. The metrics they apply are taken from a combination of techniques used in Space Syntax and those employed in the analysis of small-worlds networks by Watts and Strogatz (1998).Here we present a tool which enables a user to perform VGA on both building and urban environments, allowing the user to perform the kind of analysis proposed by Turner et al..We call this tool Depthmap . Depthmap first allows the user to import layouts in 2D DXF format and to fill the layout with a rectilinear grid of points. These points may then be used to construct a visibility graph, and we describe this procedure in section 2. After the graph hasDepthmap A program to perform visibility graph analysisAlasdair Turner University College London, UK Keywords:visibility graph,spatial analysis,software develop-ment Alasdair Turner Center for Advanced Spatial Analysis,Torrington Place Site, University College London,Gower Street,London WC1E 6BT ,UK alasdair .turner@31.2been constructed, Depthmap gives the user several options to perform analysis on the graph,which we describe in detail in section 3. The methods include those employed by Turner et al.,but also some, such as control (Hillier and Hanson, 1984) or point depth entropy (following a formula proposed by Hiller et al., 1987), which have not been previously applied to visibility graph analysis. We supply algorithmic and mathematical details of each measure, as well as samples of results, and short explanations of why we believe these may be of interest to other researchers. In section 4 we include a brief description of extra facilities included in Depthmap to adjust the edge connections in the visibility graph, and give guidance for their use in spatial analysis. Finally, we present a summary in section 5.2 Making a visibility graph from a DXF fileIn this section we describe how the user may get from a layout to a visibility graph using Depthmap. When the user first enters Depthmap, she or he may create a new graph file from the File menu. This graph file initially appears blank, and the first thing the user must do is to import a layout to be analysed. The import format used is AutoDesk s drawing exchangeformat (DXF), and only two dimensional layouts maybe imported. Once loaded, the user is shown the lay-out on the screen, and she or he may move it andzoom in and out as desired. Figure 1 shows the pro-gram at this stage. After the DXF file has been im-ported, the user is ready to add a set of locations to beused as a basis for the visibility graph.2.1 Making a grid of locations To make a set of locations, the user selects the Fill tool from the toolbar, and then clicks on a seed point in open space to make a grid of points, as shown in figure 2. When the user clicks for the first time, she or he is given the option of choosing a grid spacing,based on the units used in the original DXF, and may use for example, a 1m grid. The grid is filled from the seed point using a simple flood fill algorithm. Points may be deleted by selecting either individual points or ranges of points. Once the user is happy with the grid,she or he may then go on to make the visibility graph.The user is restricted to a rectilinear grid of points at present. We realise that this is a problem for anyone attempting a methodological investigation of VGA,rather than simply using it to analyse environments.This is due to using a grid assumption when we calculate point intervisibility, and unfortu-nately a constraint. However, various themes on the basic grid are still available, for example by using different resolutions or by rotating the DXF prior to import, or by only partiallyfilling grids.Figure 1: Theapplication as itappears after the DXFfile has beenimportedFigure 2: The userfills a section of openspace using the filltool31.32.2 Making the graphThe graph is made by Depthmap by selecting the Make Graph option from the Tools menu. The program attempts to find all the visible locations from each grid location in the layout one by one, and uses a simple point visibility test radiating from the current location to achieve this. As each location is considered, a vertex is added to the graph for this point,and the set of visible vertices is stored. Note that this is only one way that the visibility graph could be stored. It is actually more space efficient only to store the edges, but this would lead to slower algorithms later when analysing the graph. We can write a simplified form of the algorithm in pseudocode as follows. In the algorithm we use graph set notation: V(G) is the set of all locations or vertices that exist, and v i an individual location or vertex in the graph we are making. Each vertex v i will have a set of vertices connected to it, which will labelled the set V (G i ), otherwise known as the vertex s neighbourhood.The number of vertices in the neighbourhood is obviouslyeasily calculable, and Depthmap records these neighbourhoodsizes as it makes the graph. In graph theory, the neighbourhoodsize for a vertex is commonly written ki, and may be expressed as in equation 1..(1)where E(G) is the set of all edges (i.e., visibility connections) inthe graph. Note that the set E(G) is not actually stored byDepthmap, and so k i is actually calculated using the first formof this equation. Figure 3 shows a simple layout after the vis-ibility graph has been made using Depthmap. As the actual number of connections is huge for each vertex, only k i values are shown for each location rather than the mess of actual connections. Depthmap colours k i values using a spectral range from indigo for low values through blue, cyan, green, yellow, orange, red to magenta for high values. The user may change the bounds for this range, or choose to use a greyscale instead, using a menu option from the View menu. Since this paper is reproduced in greyscale, all the figures shown have used the greyscale option, where black represents low values and white represents high values.Once the graph has been constructed, the user has various options, including graph analysis,which we describe in the next section, and modification of the graph, which we describe insection 4.Figure 3:Neighbourhood size calculated for a sample layout31.4 3 Measurement of the graph In this section we describe the graph measures available to a user of Depthmap. Analysis of the graph is split into two types: global measures (which are constructed using information from all the vertices in the graph) and local measures (which are constructed using informa-tion from the immediate neighbourhood of each vertex in the graph). The user may elect to perform either or both of these types of measure by selecting from the Tools menu. She or he is presented with a dialog box, as shown in figure 4. The radius box allows the user to restrict global measures to only include vertices up to n-edge steps from each vertex. When the user clicks OK, the program calculates the measures for the whole system. The key global measures are mean depth and point depth entropy, while the key local measures are clustering coefficient and control. Once the measures have been calculated, these and derived measures are given as options on the View menu, and may be exported as plain text for use in GIS and statistical packages from File menu. We now turn to a discussion of the algorithmic imple-mentation of each measure, and explore possibilities for their use within Space Syntax re-search.3.1 Clustering Coefficient Clustering coefficient, g i , is described in detail by Watts (1999) and has its origin in theanalysis of small-world networks. Turner et al. found it useful for the detection of junction points in environments. Clustering coefficient is defined as the proportion of vertices which are actually connected within the neighbourhood of the current vertex, compared to thenumber that could possibly be connected, as shown in equation 2.(2)where E(G i ) is the set of edges in the neighbourhood of v i and k i is the as previously calculated. This is implemented in Depthmap by the following algorithm for each vertex inthe graph*Figure 4: The optionsdialog box for graphanalysis * Again note that as the set of edges E(G i ) is not recorded, the information must be recovered from the vertices in the neighbourhood, V(G i )31.5Figure 5 shows the clustering coefficient calculated for a sample spatial configuration. As noted by Turner et al. junctions in the configuration are picked out. However, as they suggest,and looking at the figure, it actually seems to pick out better the changes in visual information as the system is navigated, so low clustering coefficients occur where a new area of the system may be discovered. Examining g i , seems a promising line of investigation when looking at how visual information varies within an environment - for example, as suggested by Conroy (2000) for finding pause points on journeys.3.2 ControlControl for a location, which we will labelci, is defined by Hillier and Hanson (1984), andis calculated by summing the reciprocals of theneighbourhood sizes adjoining the vertex, asshown in equation 3.(3)A simple algorithm can be used to calculate thisvalue as follows:It should be noted that in VGA many of theimmediately adjoining neighbourhoods willoverlap, so that perhaps a better definition ofVGA control would be the area of the currentneighbourhood with respect to the total areaof the immediately adjoining neighbourhood- that is, rather than use the sum the size of allthe adjoining neighbourhoods, use the size ofthe union of those adjoining neighbourhoodsas shown in equation 4. The results of applyingthis method are shown in figure 6, althoughDepthmap is also capable of calculating controlas defined by Hillier and Hanson.(4)Figure 5: Clusteringcoefficient calculatedfor a sample layoutFigure 6: Controlcalculated for asample layout31.63.3 Mean DepthThe mean path length L i from a vertex is the average number of edge steps to reach any other vertex in the graph using the shortest number of steps possible in each case. This sort of graph measure has a long history stretching back as far as Wiener (1947), and is pertinent to visibility graph analysis due to the parallels with the use of integration in space syntax theory (Hillier et al., 1993), showing how visually connected a vertex is to all other vertices in the system. We calculate L i by constructing the set of point depths, as follows. The algorithm we use is not the most time efficient, as shortest paths are recalculated for each vertex, rather than being stored in a cache. However, the memory constraints on current personal computers mean that storing all the shortest paths in the system would rapidly use up the available memory. Hence, the algorithm that follows works in O(n 2) time. It obtains point depths for all the vertices in the system from the current vertex, by adding ordered pairs of vertices and depths to the set P.An asterisk, such as in the set pair {v 1, *}, represents a wild card matching operation. For example, {v 1, *} matches any of {v 1,1}, {v 1, 2} or {v 1, 4}.Once the point depth set has been constructed, it is facile to calculate measures such as mean depth and integration. Figure 7 shows mean depth for our sample system. As has been shown, this measure would seem to be useful understanding movement of people within building environments, where it isdifficult to apply traditional Space Syntax methods such as axial analyses at high resolutions.However, in urban environments, since we are measuring numbers of turns from location to location, VGA integration quickly approximates to axial integration (albeit with each line weighted by the street area), and due to speed considerations, it may not be as beneficial to useVGA integration in these situations.Figure 7: Mean depthcalculated for asample layout31.73.4 Point Depth EntropyIn addition to calculating measures such as mean depth, the point depth set P i allows us to explore measures based on the frequency distribution of the depths. One such measure is the point depth entropy of a location, s i , which we can express using Shannon s formula of uncertainty, as shown in equation 5. Entropy occurs in many fields, including informatics,and is proposed for use in Space Syntax by Hiller et al. (1987).(5)where d max is the maximum depth from vertex v i and p d is the frequency of point depth *d*from the vertex. This is implemented algorithmically in Depthmap as follows:.Calculating point depth entropy can give an insight into how ordered the system is from a location. For example, if a doorway is connected to a main street then there is a marked disorder in the point depths from the point of view of the doorway: at depth 1 there are only a few locations visible from the doorway, then at depth 2 there are many locations from the street, and then order contained within further depths will depend on how the street is integrated within its environment. Figure 8 shows the point depth entropy as calculated by Depthmap. Other entropy-like measures are also calculated. The information from a point is calculated using the frequency with respect to the expected frequency of locations at each depth, as shown in equation 6. Obviously, what is meant by expected is debatable, but as the frequency is based on the probability of events occurring (that is, of the j graph splitting), it seems appropriate to use a Poisson distribution (see Turner, 2001, for a more detailed discussion), which has the advantage of depending only on a single variable, the mean depth of the j graph. The resulting formula is shown in equation 6 and is similar to that used by Hiller et al. for relativised entropy. So, why calculate the entropy or information from a point?The answer is threefold: firstly, it was found to be useful by Hiller et al.; secondly, it appeals intuitively to a tentative model of people occupation of a system, in that the entropy corre-sponds to how easy it is to traverse to a certain depth within the system (low disorder is easy,31.8high disorder is hard); and thirdly, it remedies the problem that VGA integration is heavily biased towards large open areas. In axial integration, because the system is dimensionless,large open areas do not unduly weight the values of the lines; that is, the large areas only weight the values by their increased connections, not through their area. By contrast, in VGA integration the measure approximates a mean of distance times area, as discussed in the previous section. Hence, by using a topological measure such as point depth entropy we eliminate the area dependence of the measure, and instead concentrate on the visual accessi-bility of a point from all other points.(6)4 Further tools available in Depthmap As well as allowing the user to make and analyse graphs, Depthmap includes the facility to modify the graph connections. We believe this will be useful when the user wishes to model something other than a two dimensional plan - for example, when modelling a building with more than one storey, or trying to include one way entrances or exit, escalators and so on. The method to modify connections in Depthmap is as follows. Once the graph has been made, the user first selects an area by dragging a select box across the desired portion of the graph, as she or he would in many computer applications. She or he may also select other areas by holding down the Shift key and then selecting again. The user then pins this selection, using a toolbar button. Now the user may select another area in the same way.Once these two areas have been selected, the user can alter the connections between them by selecting the Edit Connections dia-log box from the Edit menu. An example is shown in figure 9.The dialog box gives several options but essentially these reduce to set operations on the neighbourhoods of the selected points. The Add option simply adds the selected points in the other set to the neighbourhood, and is useful for turning points, for example a stairwell landing. The Merge option allows the user to union the neighbourhoods of the two selected sets, and is usefulfor adding seamless merges, for example, descending an incline. Finally the Remove option can be used to take away any connections from the selected set, and for example, might be useful to convert a two way entrance to a one way entrance.5 ConclusionIn this paper, we have presented a description of the Depthmap program, designed to perform visibility graph analysis (VGA). Depthmap can be used to analyse a layout to obtain various graph measures, including integration, which has been shown to correlate well with observed movement patterns when used with axial maps (see Hillier et al., 1993, for ex-ample), and also shown to correlate with movement patterns when used with VGA (see Turner and Penn, 1999). Although we have talked only about the overall application ofDepthmap to a system to make and analyse graphs, Depthmap also has many other features Figure 8: Point depthcalculated for asample layout31.9which a user would expect from a program, such as printing, summarising graph data and so on, which we have restricted to a user manual. What we do hope to have given here is a flavour of what is achievable with the program, an insight into how the graph is analysed,and our reasons for choosing the graph measures we have included.Finally, it is worth noting that Depthmap is designed to be a tool for Space Syntax researchers. This means that we have chosen DXF as the input medium, and that the pro-gram runs interactively, allowing the graph to be modified and the analysis to be reapplied. It also means that sometimes we have not used the fastest algorithm to achieve a task, but have instead designed the program to work with the memory available on most personal comput-ers today. On a 333 MHz machine running Windows 98, Depthmap takes around an hour to process a graph with 10 000 point locations, from start to finish, and the program has been tested on graphs with up to 30 000 point locations. We hope that the Space Syntax commu-nity will enjoy using our tool and we look forward to improving it with the input and insight of future researchers.References Braaksma, J P and Cook, W J, 1980, Human orientation in transportation terminals Transportation Engineering Journal 106(TE2) 189-203Conroy, R, 2000 Spatial Navigation in Immersive Vir-tual Environments PhD thesis, Bartlett School of Graduate Studies, UCL Hanson, J, 1998 Decoding Houses and Homes (Cam-bridge University Press, Cambridge, UK)Hiller, B, Hanson, J and Peponis, J, 1987, The syntactic analysis of settlements Architecture and Behaviour 3(3) 217-231Hillier, B and Hanson, J, 1984 The Social Logic of Space (Cambridge University Press, Cambridge,UK)Hillier, B, Penn, A, Hanson, J, Grajewski, T and Xu, J, 1993, Natural movement: or configura-tion and attraction in urban pedestrian move-ment Environment and Planning B: Planning and Design 20 29-66Turner, A, 2001, Angular analysis Proceedings of the 3rd International Symposium on Space Syntax Georgia Institute of Technology, Atlanta, Geor-gia.Turner, A, Doxa, M, O Sullivan, D and Penn, A,2001, From isovists to visibility graphs: a methodology for the analysis of architectural space Environment and Planning B: Planning and Design 28(1) Forthcoming Turner, A and Penn, A, 1999, Making isovists syntatic: Isovist integration analysis Proceedings of the 2nd International Symposium on Space Syntax Vol. 3, Universidad de Brasil, Brasilia, Brazil Watts, D J, 1999 Small Worlds (Princeton University Press, Princeton, NJ)Watts, D J and Strogatz, S H, 1998, Collective dynamics of small-world networks Nature 393440-442Wiener, H, 1947, Structural determination of paraffin boiling points Journal of the American Chemistry Society 6917-20Figure 9: Editing connections。
浦发智能门锁用户手册说明书
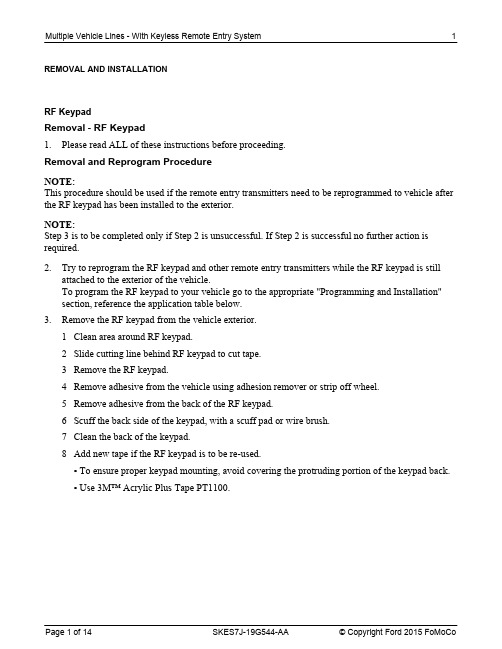
REMOVAL AND INSTALLATIONRF KeypadRemoval - RF Keypad1.Please read ALL of these instructions before proceeding.Removal and Reprogram ProcedureNOTE:This procedure should be used if the remote entry transmitters need to be reprogrammed to vehicle after the RF keypad has been installed to the exterior.NOTE:Step 3 is to be completed only if Step 2 is unsuccessful. If Step 2 is successful no further action is required.2.Try to reprogram the RF keypad and other remote entry transmitters while the RF keypad is stillattached to the exterior of the vehicle.To program the RF keypad to your vehicle go to the appropriate "Programming and Installation"section, reference the application table below.3.Remove the RF keypad from the vehicle exterior.1Clean area around RF keypad.2Slide cutting line behind RF keypad to cut tape.3Remove the RF keypad.4Remove adhesive from the vehicle using adhesion remover or strip off wheel.5Remove adhesive from the back of the RF keypad.6Scuff the back side of the keypad, with a scuff pad or wire brush.7Clean the back of the keypad.8Add new tape if the RF keypad is to be re-used.▪To ensure proper keypad mounting, avoid covering the protruding portion of the keypad back.▪Use 3M™ Acrylic Plus Tape PT1100.4.Reprogram the RF keypad from the driver seat area.To program the RF keypad refer to the table below for appropriate reprogramming procedure.CONFIGURATION CHARTModel Year Model Communication Type Installation Method 2014+Fusion2C2015+F-1502C2015+Edge2C2016+Explorer2C2017+Super Duty2C2010+Transit Connect1A2007+Focus1A2011+Fiesta1A2013+Escape1A2013+C-Max1A2014+Transit1A2013Fusion Not Supported Not Supported-Intelligent Access Not Supported Not SupportedVehicles2005+All Else1B Configure DeviceNOTE:Reference the table above for communication type that applies for the vehicle.NOTE:The keyless entry keypad can be used in various vehicle applications. The following procedure describes the method to switch between the two communication types.5.Upon pressing the 1/2, 3/4, and 9/0 buttons simultaneously for at least one second, all five buttonswill flash at a two flashes per second rate. This indicates the keypad is waiting for master code entry. The master code is entered as in a normal keypad unlock, each button press will give another five second window for the next button press. If no button is pressed within five seconds theconfigure mode will exit.6.When the proper master code is entered the 9/0 button will flash a pattern that corresponds to thecurrent protocol set:•One flash per second for "Communication Type 2".•Three flashes per second for "Communication Type 1" (Default).7.You will have 10 seconds to:•Press the 9/0 button to change the protocol to "Communication Type 2".•Press the 1/2 button to change the protocol to "Communication Type 1" (Default).Type A - Programming and InstallationNOTE:It is easier to program the keypad prior to attaching it to the vehicle.NOTE:After five seconds of idle time, the keypad will reset itself.NOTE:You must have all remote entry transmitters available before beginning this procedure, IKTs, Fobs and RF keypads. Check owners guide "Locks and Security" for maximum remote entry transmitters allowed,and proper key positions.If all remote entry transmitters are not present during the programming procedure, the missing transmitters will not work following programming.NOTE:The vehicle will exit programming mode after 20 seconds of inactivity.NOTE:Ensure the brake pedal is not depressed during this procedure; the electronic signal could interfere with programming.9.Make sure that you have all of the IKTs, fobs and RF keypads for this vehicle.NOTE:Only one button press is recognized. After the button press is registered, the flash rate will change to reflect the new setting of the protocol. If you first press the 1/2 button, you cannot then press the 9/0button to change the selection. You must exit the session.8.Press the 5/6 button to confirm the entry, the 1/2, 3/4, 5/6 and 7/8 buttons will flash four times to confirm protocol change and the keypad will turn off and sleep. If the 5/6 button is not pressed within 10 seconds of protocol change, the protocol will NOT change and the procedure will need to be repeated.13.Within 10 seconds of completing the previous step, press any button on remote entry transmitter, ifequipped.The system will chime once, to confirm that the Fob has been programmed.14.Within 10 seconds of completing the previous step, press any button on remote entry transmitter, ifequipped.The system will chime once, to confirm that the Fob has been programmed.15.Within 10 seconds of completing the previous step, press the 7/8 and 9/0 buttons simultaneously onthe RF keypad 1.The system will chime once, to confirm that the RF keypad has been programmed.Repeat this step if more than one RF keypad is used.16.After all remote entry transmitters have been programmed; turn the ignition to the RUN position forthe vehicle to exit programming mode.17.Test all remote entry transmitters for proper operation, perform a lock/unlock cycle on all remoteentry transmitters.NOTE:Most vehicles have an audible feedback when programming such as horn honks, door locks/unlocks, or chimes.Some vehicles may not have audible feedback e.g C-MAX18.If the remote entry transmitters do not program properly repeat the "Type A - Programming andInstallation" procedure. The driver's door may need to be opened and closed to reset the system.10.Unlock the vehicle with programmed keyfob.11.Insert a key in the ignition.12.NOTE:Some vehicles may require eight key cycles before returning to the OFF position.Turn the key from the OFF position to the RUN (not START) position four times within sixseconds.The fourth turn must end in the OFF position.The system will chime to confirm the vehicle is in programming mode.20.Unlock the vehicle with programmed keyfob.21.Put a key in the ignition.22.Turn the key from the OFF position to RUN (not START) position eight times within 10 secondswith the eighth turn ending in the RUN position. The doors will lock, and then unlock, to confirm the vehicle is in programming mode.23.Within 20 seconds of completing the previous step, press any button on fob 1, if equipped. Thedoors will lock, and then unlock, to confirm that the fob has been programmed.24.Within 20 seconds of completing the previous step, press any button on fob 2, if equipped. Thedoors will lock, and then unlock, to confirm that the fob has been programmed.25.Within 20 seconds of completing the previous step, press the 7/8 and 9/0 buttons simultaneously onthe RF keypad 1.The doors will lock, and then unlock, to confirm that the RF keypad has been programmed.Repeat this step if more than one RF keypad is used.NOTE:2Q VRPH ,.7 NH\V WKH GRRU ORFNV ZLOO QRW DFWLYDWHType B - Programming and Installation19.Make sure that you have all of the fobs and RF keypads for this vehicle.28.If the remote entry transmitters do not program properly repeat the "Type B- Programming andInstallation" procedure. The Driver's door my need to be opened and closed to reset the system.Type C - Programming and Installation30.Verify that the Integrated Diagnostic System (IDS) is updated to the most current version.31.Connect IDS:•Follow the prompts to select new vehicle session.•Enter VIN.32.Program the keyless entry keypad to the vehicle using the IDS.•Select the Tool Box icon.•Select Body.•Select RF Keypad Learn Process.26.After all remote entry transmitters have been programmed, turn the ignition to the OFF position.The doors will lock, and then unlock, to confirm that the vehicle has exited programming mode.27.Test all remote entry transmitters for proper operation, perform a lock/unlock cycle on all remoteentry transmitters.29.Refer to the Configuration Chart of this document to ensure the correct Communication Type isused on the keyless entry keypad. Instructions for programming to the correct communication type may be found under Configure Device.34.Enter the device’s serial number and select the tick button.•The serial number is up to six digits.•The serial number is located on the part package.•If IDS responds with “Serial Number is not Valid”, go to the "Alternate Programming Method" section.•If all four storage locations are in use, go to the "Free Storage Location" section.Synchronize Keyless Entry Keypad to Vehicle (Type C - Continued)35.Once the unique data is entered, the programming routine will ask to select the tick button andactivate the Lock command on the keypad. This step will ensure that the keypad and the vehicle are synchronized.• A progress bar will be displayed and will complete over 10 seconds while the vehicle is commanded to synchronize with the keypad.•During the display of the 10 second progress bar, activate the Lock command by pressing DQG WKHQ UHOHDVLQJ the 7/8 and 9/0 buttons on the keypad simultaneously.33.Follow On-screen instructions until the screen below is displayed:4Within 5 seconds of Master Code entry, press the 3/4 button to unlock all doors.5Within 5 seconds of pressing the 3/4 button, press the 5/6 button multiple times to release the trunk.Alternate Programming Method (Type C - Continued)37.If IDS responds with “Serial Number is not Valid”, answer YES to the question “Would you like toenter 48-character SK/TIC/RC string?”•The 48-character string is located on the part package.•Using either the computer keyboard or the on-screen buttons, enter the 48 characters, 4 digits at a time.•Select the tick button when all 48 characters have been entered.Test Keyless Entry Keypad Operation (Type C - Continued)36.When the synchronization is complete, the programming routine will instruct the installer to turn offthe vehicle ignition key and test operation of the keypad. At this time, perform the following steps:1Close all vehicle doors.2Press the 7/8 and 9/0 buttons on the keypad to lock all doors.3Enter the keypad’s Master Code to unlock the driver’s door.Free Storage Location (Type C - Continued)38.If all four storage locations are in use, IDS will ask if you would like to determine which keypadunits are programmed to which storage locations. The process will begin by asking you to activate device #1:•Press the 7/8 and 9/0 buttons on the first keypad that is already programmed to the vehicle. Then, select the tick button on IDS.•IDS will ask if you would like to check another device. If there is another keypad on the vehicle, select YES on IDS to check that keypad unit. Proceed with the activation process to see if it isprogrammed to the vehicle.•Repeat this process for all keypads attached to the vehicle. Up to four keypads can be programmed to the vehicle.39.When all keypads have been tested, select NO when asked by IDS whether you would like to testanother device. A screen similar to the one below will be displayed:1Location # 1 – 4 refers to the four storage locations on the vehicle that may be programmed with information for a keypad.2“2 in use” refers to the second keypad device that was activated during the device check.3“2 in use” is listed next to the storage location where it is programmed.▪If you want to delete keypad #2 from the vehicle, select Location #2 and select the tick button.▪If you want to keep keypad #2 programmed to the vehicle and delete all other locations, selectLocation #1, Location #3, and Location #4. Then select the tick button.Troubleshooting (Type C - Continued)40.If the programming procedure has been completed, and the vehicle does not respond to commandsfrom the keyless entry keypad, try these suggestions:•Ensure that the vehicle is NOT a push-button start vehicle.•Ensure that the device is configured properly by following the steps in the "Configure Device"section.•Ensure that the device is synchronized to the vehicle:▪Enter the programming process ("Program Device to Vehicle" section).▪Instead of entering the device’s serial number, select the Delete button to determine whetherthe vehicle recognizes the keypad.▪If the device is recognized by the vehicle (listed as In Use when activated), delete the storagelocation contents.▪Re-enter the programming process and complete all steps through the synchronization process and the operational test.Programming a Personal Entry Code (if desired) - All VehiclesNOTE:If you lose your code card, please contact your Ford or Lincoln dealership for factory code retrieval. NOTE:Do not set a personal code that uses five of the same number. Do not set a personal code that uses five numbers in sequential order. There is a maximum of two access codes; the factory set code and one personal code. If you reprogram the personal code the prior personal code will be erased.NOTE:Do not repeat the "Programming and Installation" section if a mistake is made in the "Programminga Personal Entry Code" section.41.Enter the factory set code, as indicated on your code card.42.Within five seconds of entering the factory code, press and hold the 1/2 button for 1 second, the 9/0button will flash twice to confirm the keypad is in programming mode.43.Within five seconds, enter your desired personal 5-digit code. Each digit must be entered within fiveseconds of the previous digit.44.The vehicle doors will unlock-lock-unlock to confirm that your personal code has been programmedto the keypad and the 9/0 button will flash twice to confirm that the keypad has exited programming mode.Adhering the Keypad to the Vehicle - All VehiclesNOTICE:Do not adhere to moveable glass or windshield.NOTE:For proper adhesion, the mounting surface should be at least 60°F (15°C).NOTE:The tape is very sticky and will adhere quickly once contact is made.NOTE:This product is designed to attach to your car door, centered between the door handle and the window sill, but will work mounted to a relatively flat surface.45.Hold keypad up to desired mounting surface to confirm that all the tape will contact the mountingsurface.46.Clean the vehicle surface where the keypad is to be adhered with the alcohol wipe provided.47.Pull the tape tabs off the keypad tape, orient the keypad in the desired location and press onto thedoor surface.•Be sure to press firmly on all edges to ensure proper adhesion of the tape.Using the Keypad - All VehiclesNOTE:Refer to the "Locks and Security" section of your vehicle Owner’s Guide for operation of remote transmitters during RUN/START. Remote transmitter operation in RUN/START key position is model dependent.48.To unlock the drivers door, enter your personal 5-digit code or the factory set code.•Each digit must be pressed within five seconds of each other.49.To unlock all doors, press 3/4 button within five seconds of entering a valid keypad code.51.To unlock and open the driver side power sliding door, if equipped, press the 7/8 button twicewithin five seconds of entering a valid code.52.To lock all doors, press the 7/8 and the 9/0 keys simultaneously.•You do not have to enter a 5-digit code.Low Power Warning - All Vehicles53.If you unlock the door with the keypad and the locks cycle one additional time, it is time to replacethe unit.•The battery is not replaceable.50.To unlock the trunk or hatch, if equipped, press the 5/6 button within five seconds of entering avalid keypad code (IKT vehicles may require the 5/6 button to be pressed twice). Press the 5/6button twice to open or close the passenger side power sliding door, if equipped.Anti-Scan Mode - All Vehicles54.If the wrong code has been entered 7 times (35 consecutive button presses) the keypad is disabledfor one minute and the keypad lights will flash during this time.To Remove a Personal Code, If Desired - All Vehicles55.Enter the factory code, then within five seconds press and hold the 1/2 button, for 5 seconds. Thevehicle will unlock, lock and then unlock to confirm that your personal code has been removed. The 9/0 key will flash four times (2 quick then 2 slow) to confirm that your personal code has been removed.56.Release the 1/2 button.Owners Instructions - All Vehicles57.Place the user manual with the vehicle's owners manual when programming and installation iscomplete.58.This device complies with part 15 of the FCC rules and with RSS-210 of Industry Canada.Operation is subject to the following two conditions:1This device may not cause harmful interference.2This device must accept any interference received, including interference that may cause undesired operation.•Changes or modifications not expressly approved by the party responsible for compliance could void the user's authority to operate this equipment.。
树莓派开发手册
树莓派开发手册摘要:I.引言- 介绍树莓派的背景和特点- 说明树莓派在教育和开发领域的应用II.树莓派硬件介绍- 概述树莓派的硬件配置- 详细介绍树莓派各部件的功能和作用III.树莓派操作系统- 介绍树莓派可用的操作系统- 讲解如何安装和配置操作系统- 说明操作系统的重要性和优势IV.树莓派编程环境- 介绍树莓派编程的基本环境- 讲解如何配置编程环境- 列举适用于树莓派的编程语言和开发工具V.树莓派项目实例- 介绍几个典型的树莓派项目实例- 分析项目实例的实现过程和难点- 展示树莓派在不同场景下的应用VI.树莓派社区与资源- 介绍树莓派的官方网站和社区- 讲解如何获取技术支持和教程资源- 分享一些实用的树莓派技巧和经验VII.结论- 总结树莓派的优势和应用领域- 鼓励读者尝试和探索树莓派的更多可能性正文:树莓派(Raspberry Pi)是一款由英国树莓派基金会开发的微型电脑,以其小巧的体积、低廉的价格和强大的性能受到众多开发者和爱好者的青睐。
树莓派广泛应用于教育、开发和创客领域,为大家提供了一个便捷的计算机硬件平台。
树莓派硬件包括处理器、内存、存储、显示器、网络接口、USB 接口等组件。
其中,处理器和内存决定了树莓派的性能,存储和显示器则影响了其使用体验。
此外,树莓派还具备丰富的外设接口,方便用户进行扩展和定制。
对于树莓派的操作系统,常见的有Raspbian、Debian 和Windows 10 IoT Core 等。
其中,Raspbian 是专为树莓派设计的操作系统,具有良好的兼容性和稳定性。
用户可以根据自己的需求选择合适的操作系统进行安装和配置。
为了进行编程开发,树莓派需要安装相应的编程环境。
常用的编程环境包括Python、C++和Java 等。
用户可以根据自己的编程经验和项目需求选择合适的编程语言。
同时,树莓派还支持多种开发工具和库,为开发者提供了便捷的开发环境。
在实际应用中,树莓派可以应用于很多有趣的项目。
Connect Tech Jetson AGX Xavier 家用版配套包说明书
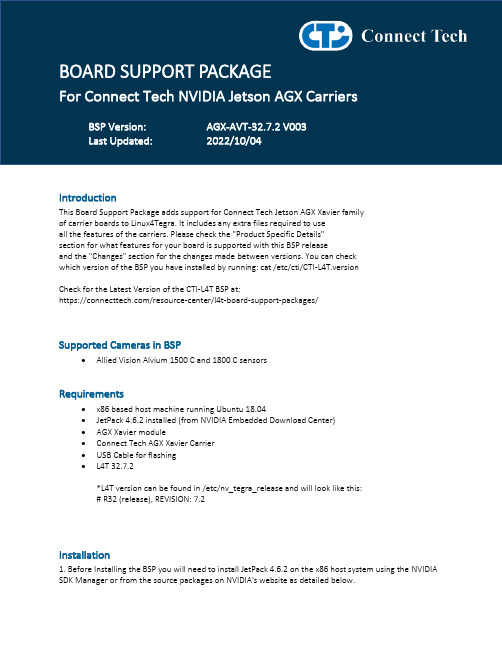
IntroductionThis Board Support Package adds support for Connect Tech Jetson AGX Xavier familyof carrier boards to Linux4Tegra. It includes any extra files required to useall the features of the carriers. Please check the "Product Specific Details"section for what features for your board is supported with this BSP releaseand the "Changes" section for the changes made between versions. You can checkwhich version of the BSP you have installed by running: cat /etc/cti/CTI-L4T.versionCheck for the Latest Version of the CTI-L4T BSP at:https:///resource-center/l4t-board-support-packages/Supported Cameras in BSP•Allied Vision Alvium 1500 C and 1800 C sensorsRequirements•x86 based host machine running Ubuntu 18.04•JetPack 4.6.2 installed (from NVIDIA Embedded Download Center)•AGX Xavier module•Connect Tech AGX Xavier Carrier•USB Cable for flashing•L4T 32.7.2*L4T version can be found in /etc/nv_tegra_release and will look like this:# R32 (release), REVISION: 7.2Installation1. Before Installing the BSP you will need to install JetPack 4.6.2 on the x86 host system using the NVIDIA SDK Manager or from the source packages on NVIDIA's website as detailed below.2. Copy the CTI-L4T-AGX-AVT-32.7.2-V###.tgz package into~/nvidia/nvidia_sdk/JetPack_4.6.2_Linux_JETSON_AGX_XAVIER/Linux_for_Tegra/3. Extract the BSP: tar -xzf CTI-L4T-AGX-AVT-32.7.2-V###.tgz4. Change into the CTI-L4T directory: cd ./CTI-L4T5. Run the install script (as root or sudo) to automatically install the BSP files to the correct locations: sudo ./install.shcd ..6. The CTI-L4T BSP is now installed on the host system and it should now be able to flash the AGX Xavier module.7. To flash on the AGX Xavier use the following (do not add ".conf"):CTI Assisted Flashing: ./cti-flash.shManual Flash: ./flash.sh cti/<module>/<boardname>/<config> mmcblk0p1Examples:./flash.sh cti/xavier/rogueX/base mmcblk0p1./flash.sh cti/xavier-I/rogue/li-imx274 mmcblk0p1Installing JetPack from SDK ManagerPlease follow installation steps from kdb374 for Jetpack 4.2+ https:///resource-center/kdb374/Installing JetPack from Nvidia's Source packages (Alternate approach)1. Go to https:///embedded/linux-tegra-archive and click on the green button labeled "32.7.2 >".2. Download the "L4T Driver Package (BSP)" and "Sample Root Filesystem" files for AGX Xavier. Afterwards, you should havethe files "Jetson_Linux_R32.7.2_aarch64.tbz2" and "Tegra_Linux_Sample-Root-Filesystem_R32.7.2_aarch64.tbz2".3. Create a directory named ~/nvidia/nvidia_sdk/JetPack_4.6.2_Linux_JETSON_AGX_XAVIER/ and copy the "Jetson_Linux_R32.7.2_aarch64.tbz2"file you downloaded into that directory.4. Unzip the tarball:"sudo tar jxf Jetson_Linux_R32.7.2_aarch64.tbz2"5. You should now have a new directory called Linux_for_Tegra in your"JetPack_4.6.2_Linux_JETSON_AGX_XAVIER" folder.Change directories into that and then copy the "Tegra_Linux_Sample-Root-Filesystem_R32.7.2_aarch64.tbz2" file you downloaded into the rootfs folder inside.6. Change into the rootfs folder and unzip the tarball:"sudo tar jxf Tegra_Linux_Sample-Root-Filesystem_R32.7.2_aarch64.tbz2"7. If you wish to flash one of NVIDIA’s devkits, or move on to installing CTI’s BSP. You can change directoriesback to ~/nvidia/nvidia_sdk/JetPack_4.6.2_Linux_JETSON_AGX_XAVIER/Linux_for_Tegra/ and run: "sudo ./apply_binaries.sh"Flashing AGX Xavier Modules1. Connect the AGX Xavier and Carrier to the computer via USB, following theinstructions in the appropriate manual.2. Put the system to be flashed into recovery mode, following theinstructions in the appropriate manual3. Run "./cti-flash.sh" or "./flash.sh cti/<module>/<board>/<config> mmcblk0p1" from Linux_for_Tegra directory4. Once the flashing has completed, the Xavier will reboot5. To switch between different boards, you can repeat these steps. Alternatively follow the instructions below for runtime switching profiles on the XavierSwitching Profiles on Xavier1. Open a terminal on the Xavier2. Run "sudo cti-agx-fdt.sh"3. Select the profile you wish to switch to from the menu4. Restart the systemNote: This script updates dtb by appending/replacing the FDT variable in extlinux.conf It also sets root=/dev/mmcblk0p1 by modifying the "APPEND" variable Upgrading to a New Package ReleaseNote that using sudo apt-get upgrade may break dependencies required bythe Nvidia Jetpack.It is recommended you reflash your module if you wish to update to anewer package version.Deb Packages are still provided on the CTI deb server, and our source listis still provided in the release. If you wish to use apt-get upgrade,you can do so at your own risk:run:apt-get updateapt-get upgrade nvidia-l4t-coreNote that you will need to use the device tree switching script described inthe previous section to reselect your configuration.This will ensure that you are using the updated device tree.Product Specific DetailsAGX101 (Rogue)•CAN Support•USB 3.1 Support•USB OTG Support•GbE Phy Support•Supports JCB005 Allied Vision Camera(4-Cam and 6-Cam).•SPI support•UART support•I2C support•GPIO support•NVMe card support•Wifi/Bluetooth card support•Micro SD card support•HDMI supportAGX103 (RogueX)•CAN Support•USB 3.1 Support•USB OTG Support•Wifi/Bluetooth card Support•NVMe card support•I2C Support•GPIO Support•GbE Phy Support•Supports JCB005 Allied Vision Camera(4-Cam and 6-Cam).•SPI support•UART support•HDMI support•Micro SD Card support.AGX105 (Rogue-10G)•CAN Support•USB 3.1 Support•USB OTG Support•Wifi/Bluetooth card Support•NVMe card support•OCuLink connector•I2C Support•GPIO Support•GbE Phy Support•10G GbE Phy Support•Supports JCB005 Allied Vision Camera(4-Cam and 6-Cam).•SPI support•UART support•HDMI support•Micro SD Card support.ChangesVersion AGX-AVT-32.7.2 V004, Oct 03, 2022•Added support for AGX115.•Updated Allied Vision drivers to release tag l4t-32.7.1-4.0.0.Version AGX-AVT-32.7.2 V002, Aug 26, 2022•Added support for PTN5150 USB CC Logic chip to AGX113.Version AGX-AVT-32.7.2 V001, June 20, 2022•Initial release on Jetpack 4.6.2 L4T 32.7.2.Version AGX-AVT-32.7.1 V001, May 09, 2022•Initial release on Jetpack 4.6.1 L4T 32.7.1.Version AGX-AVT-32.6.1 V003, February 11, 2022o Updated allied version kernel drivers to version 2.1.0.o Fixes kernel module version errors experienced with newer avc camera firmware. Version AGX-AVT-32.6.1 V002, Aug 26, 2021•Adds updates addressed in Nvidia's June 18th security bulletin•Adds Allied Vision cameras support for RogueX•Initial release on Jetpack 4.6 L4T 32.6.1.•Note: This package does not support other camera sensors.Version AGX-AVT-32.5.2 V001, July 21, 2021•Initial release on Jetpack 4.5.2 L4T 32.5.2.o(Note) at the time of release (2021-07-21), Jetpack 4.5.2 is not supported bysdkmanager,sources also need to be manually downloaded (source_sync.sh does not work for 32.5.2 tag).o Supports Allied Vision Camera on JCB005 adapter board on AGX101(Rogue).o Uses GPIO35 as reset pin to enable external camera GPIOs on JCB005.o Note: This package does not support other camera sensors.Version AGX-AVT-32.5 V005, May 20, 2021•Supports Allied Vision Camera on JCB005 adapter board on AGX101(Rogue).•Uses GPIO35 as reset pin to enable external camera GPIOs on JCB005.•Note: This package does not support other camera sensors.Version AGX-AVT-32.5 V002, Mar 18, 2021•Supports Allied Vision Camera on JCB005 adapter board on AGX101(Rogue).•Supports 4-Camera and 6-Camera profiles.•Note: This package does not support other camera sensors.Version AGX-32.5 V001, Feb 05, 2021•Initial release on Jetpack 4.5 L4T 32.5•IMX390 cameras not supported•Bootloader OTA upgrades are supported.Version AGX-32.4.4 V004, Jan 14, 2021•Supports IMX274 MIPI camera on Leopard 6 camera adapter boardon AGX101(Rogue) and AGX103 (RogueX).•Supports up to 6 Cameras.•Note: This package does not support other camera sensors or adaptor boards.Version AGX-32.4.4 V003, Dec 09, 2020•Resolves "disagrees about module_layout" issue for loading external kernel modules Version AGX-32.4.4 V002, Dec 07, 2020•Supports Allied Vision Camera on JCB005 adapter board on AGX101(Rogue).•Supports 4-Camera and 6-Camera profiles.•Note: This package does not support other camera sensors.Version AGX-32.4.4 V001, Nov 13, 2020•Initial release on Jetpack 4.4.1 L4T 32.4.4Version AGX-32.4.3 V002, October 15, 2020•Added colour patch from Leopard for IMX390 camerao This supports single camera•Upgrade support from cti debian server from this version onwards•Supports apt-get upgrade•Installs a script to modify extlinux.conf to switch dtb•Script: cti-agx-fdt.sh•Install path: /usr/bin•Execute: sudo cti-agx-fdt.sho Recommends to perform power cycle when switching between camera profiles using extlinux.conf(cti-agx-fdt.sh)o Set power mode as "MAXN" when running all 8 cameras to avoid any lag.Version AGX-32.4.3 V001, July 29, 2020•Initial release on Jetpack 4.4 L4T 32.4.3Version AGX-32.4.2 V002, June 15, 2020•Added support for JCB004 IMX390 and E-Con cameras on dev kit•Added support for JCB002 E-Con camera on rogue/rogueX•Added support for Elroy, Spacely on MimicVersion AGX-32.4.2 V001, June 05, 2020•Initial releaseVersion AGX-32.3.1 V006, May 29, 2020•Fixed login loop•Added deb packagedVersion AGX-32.3.1 V004, May 07, 2020•Fixed issue with install.sh scriptVersion AGX-32.3.1 V004, Feb 24, 2020•Added support for Leopard IMX390 cameras on JCB004 for AGX Xavier devkitVersion AGX-32.3.1 V003, Feb 14, 2020•Added support for E-CON AR0330 cameras on JCB004 for AGX Xavier devkitVersion AGX-32.3.1 V002, Feb 13, 2020•Added support for E-CON AR0330 cameras on JCB002 for Rogue and Rogue-XVersion AGX-32.3.1 V001, Feb 06, 2020•Initial version for JetPack 4.3 (L4T 32.3.1)•Added JCB002 adapter support to Rogue-X•Fixed eth0 hotplug issue•Prevented i2c error message from appearing in dmesg logs of modules with no camera support •Added SPI supportVersion AGX-32.2.1 V003, Dec 23, 2019•Fixed cti-flash.sh to support flashing•Corrected verbose in install.shVersion AGX-32.2.1 V002, Dec 10, 2019•Support for AGX Xavier 8GB module for Rogue and Rogue-X carriersVersion AGX-32.2.1, Dec 05, 2019•Initial Release for JetPack 4.2.2 (L4T 32.2.1)Version AGX-32.1.0, Nov 08, 2019•Added camera support (MIPI CSI Expansion)Version AGX-32.1.0, Nov 04, 2019•Initial ReleaseVersion 203, Jun 17, 2019•Added Rogue Camera Support•Fixed an Issue Where Some Modules Would Not FlashVersion 202, Apr 30, 2019•Changed Kernel Name to 4.9.104-tegraVersion 201, Apr 8, 2019•Initial Release for the Mimic and Rogue JetPack 4.2 (L4T 32.1.0)Version 200, Mar 15, 2019•Initial Release for the Mimic and Rogue JetPack 4.1 (L4T 31.1.0)Contact Connect TechIf you have any problems, questions or suggestions regarding the Board Support Package and hardware, please feel free to contact Connect Tech Inc.。
SICK Vision Suite User Manual 1.1说明书

SICK Vision Suite User Manual 1.1Contents1 Preface (3)2 Notes on usage (4)3 Introduction (5)4 Basic terms (6)4.1 GenICam (6)4.2 GenAPI (6)4.3 SFNC (6)4.4 GenTL (7)4.5 GenTL modules (7)4.6 GenTL SFNC (8)5 Terms and abbreviations (9)6 SICK Vision Suite (10)7 Components (11)8 Applications in SICK Vision Suite (12)8.1 SICK Vision Cockpit (12)8.2 Command line tools (12)8.2.1 Configuring a camera (13)8.2.2 Configuring network settings (13)8.2.3 Updating the camera firmware (14)8.3 Executable samples (15)1 PrefaceIntroductionSICK AG has taken every possible care in preparing this manual. We however assume no liability for the content, completeness or quality of the information contained therein. The content of this manual is regularly updated and adapted to reflect the current status of the software. We furthermore do not guarantee that this product will function without errors, even if the stated specifications are adhered to.Under no circumstances can we guarantee that a particular objective can be achieved with the purchase of this product.Insofar as permitted under statutory regulations, we assume no liability for direct damage, indirect damage or damages suffered by third parties resulting from the purchase of this product. In no event shall any liability exceed the purchase price of the product.Please note that the content of this manual is neither part of any previous or existing agreement, promise, representation or legal relationship, nor an alteration or amendment thereof. All obligations of SICK AG result from the respective contract of sale, which also includes the complete and exclusively applicable warranty regulations. These contractual warranty regulations are neither extended nor limited by the information contained in this manual. Should you require further information on this product, or encounter specific problems that are not discussed in sufficient detail in the manual, please contact your local dealer or system installer.TrademarksMicrosoft and Windows are trademarks or registered trademarks of Microsoft Corporation. All other products or company names mentioned in this manual are used solely for purposes of identification or description and may be trademarks or registered trademarks of the respective owners.Copyright© SICK AG. All rights reserved. This manual may not be reproduced, transmitted or translated to another language, either as a whole or in parts, without the prior written permission of SICK AG.Status: April 2020ContactVisit our web site where you will find all the latest information about our software and hardware products.Address SICK AGErwin-Sick-Str. 1D-79183 Waldkirch, GermanyT+49 7681 202-0E*************W 2 Notes on usageThis symbol indicates hints with useful information for better understanding and usingfeatures and functions.This symbol indicates important warnings for product safety to prevent damage.This symbol indicates important warnings for personal safety to prevent injury.3 IntroductionSICK Vision Suite is a comprehensive software package from SICK AG that can be used with GenICam-compliant industrial cameras. SICK Vision Suite provides all necessary tools to open cameras in an application with graphical user interface, to parametrize them, to capture images, etc. or to program your own application.Fig. 1: SICK Vision Suite4 Basic termsFig. 2: GenICam and Vision standards·GenICam·GenAPI·SFNC·GenTL·GenTL modules·GenTL SFNC4.1 GenICamGenICam (Generic Interface for Cameras) is a generic programming interface for cameras in industrial image processing. The GenICam standard is supervised by EMVA (European Machine Vision Association). The current version of the GenICam definition and a reference implementation of the GenAPI are available on the web site . There you will also find further information about the structure of GenICam standard.4.2 GenAPIWithin the GenICam standard, the GenAPI (Generic Application Programming Interface) is used for camera configuration, camera access and camera control. The GenAPI reads the description files (camera XML) of the GenICam-compliant cameras describing which features the cameras support.4.3 SFNCThe SFNC (Standard Features Naming Convention) defines camera features and properties and their names that can be included in the camera XML. The camera features are implemented in the firmware, i.e. the camera is not dependent on drivers installed on the PC. The features are grouped under different nodes in a tree and follow a well-defined access scheme. Each feature is clearly described:·what type it is (integer, floating point, string, etc.)·what the feature can do (feature description)·which are the minimum and maximum values·which discrete parameters exist for some features ("enumeration")·which feature affects other featuresExample: adjusting the exposure time, for example, changes the maximum possible frame rate. In thecamera XML it is specified that the frame rate should be read out again in case of an exposure time change.·etc.This exact description allows to dynamically read and display the current state of the camera and its features at runtime. Normally, this is done in an application via a graphical tree view. Since each feature also specifies which value is below, the control elements can be chosen accordingly in the application and the tree can be built dynamically. This behavior is referred to as "generic".4.4 GenTLThe GenTL (Generic Transport Layer) is a layer that is responsible for the transport of the camera data. The GenTL (or transport layer) converts the commands of the GenAPI and/or the application (consumer) into commands for the camera driver. Furthermore, the GenTL is responsible for submitting the camera XML to the GenAPI.It is differentiated between a GenTL Producer and a GenTL Consumer:·The GenTL Producer is the software that accesses the camera and provides the image data for an application. A GenTL Producer is provided as a platform-dependent, dynamically loadable library. The file extension of this library is *.cti (Common Transport Interface).·The GenTL Consumer is a software e.g. an application that receives the data.4.5 GenTL modulesThe GenTL consists of different modules, which are represented in a hierarchical tree structure with the system module as root.Fig. 3: GenTL modules·System moduleThe system module is called once for each GenTL. It is the entry point for a GenTL Producer from which the subsequent modules are called.·Interface moduleAn interface module represents a specific hardware interface, e.g. a network card for an Ethernet-based GenTL.·Device moduleYou can access multiple devices through an interface. These are the actually available devices e.g. cameras. A device can only be opened once with full access control.·Stream moduleTo capture images from a camera, for example, an image data stream has to be initialized in that device. The GenTL can capture multiple streams per device if the device supports it.·Buffer moduleThe buffers are the image memories into which the captured images are written. The image memories can be allocated either by the GenTL Consumer or GenTL Producer.4.6 GenTL SFNCThe GenTL standard defines a set of feature names and their definitions. The GenAPI module is used to access these features. The GenTL SFNC (GenTL Standard Feature Naming Convention) standardizes the used features in order to separate the GenTL standard as far as possible from the definition of specific features.The GenTL SFNC does not replace the features that are defined in the regular GenICam SFNC, but enhances them by explicitly covering only the features of the GenTL producer itself.7 ComponentsSICK Vision Suite provides all necessary libraries and software interfaces for application developers and thus forms a complete SDK (software development kit). SICK Vision Suite is based on the module hierarchy defined by the standards (GenICam, GenTL). At the same time, the interface is considerably easier to operate without limiting the functionality of the standardized interface. SICK Vision Suite can be used with the C#, C+ +, and C programming languages. The use of C# or C++ is recommended.In addition, SICK Vision Suite combines GUI-based applications and practical command line tools. The components in SICK Vision Suite are:SICK Vision APIApplication programming interface that provides convenient access to all associated libraries (GenAPI, GenTL, etc.). The core task of the SICK Vision API is the communication with the camera, the camera parametrization and the transfer of the image data to the computer.The SICK Vision API is described in a separate documentation.SICK LibIMGThis is a library for high-performance image processing on the computer (Image Processing Library). The SICK LibIMG can be used, for example, to convert camera image that were captured via the SICK Vision API from raw bayer format into color (debayering).The SICK LibIMG is described in a separate documentation.Samples (source code)All samples are delivered open as source code in SICK Vision Suite. Thus, the samples can also be used as starting point for your own programming.Under Windows, the samples are also included as executable files (binaries) and can be executed directly. Transport layerThe transport layers are responsible for transferring the camera data to the user application. It is a low-level hardware interface for translating API commands into camera understandable commands.·SICK GenICam Producer (GEVK)GenTL Producer (required for image processing programs based on the GenICam interface) including a kernel driver to improve Ethernet performance. The use of this GenTL Producer is recommended.·SICK GenICam Producer (GEV)GenTL Producer (required for image processing programs based on the GenICam interface) This GenTL Producer can be installed as an alternative to "SICK GenICam Producer (GEVK)" if it is not possible to install a kernel driver on the system.SICK Vision CockpitGraphical user interface for camera parametrization and live display of images. See SICK Vision Cockpit ToolsCollection of useful command line programs, e.g. to update the camera firmware. See Command line tools Samples (binaries)Collection of sample programs that are offered both in source code and as executable files and can therefore be used directly. See Executable samples8 Applications in SICK Vision Suite·SICK Vision Cockpit·Command line tools·Executable samples8.1 SICK Vision CockpitThe SICK Vision Cockpit provides you with a graphical interface to quickly and easily evaluate cameras without programming a line of code. In addition to display all camera parameters in a GenICam-typical tree view, the SICK Vision Cockpit provides you with a lot of practical image information and dialog-based settings.1.Menu and symbol bar, e.g. open camera, start/stop image acquisition or change camera settings2.Camera list with the available GenTL modules (transport layers, interfaces, cameras)In the camera list, for example, use the context menu to open the dialog for configuring the IP address of a GigE Vision camera.3.Camera properties in the tree views with filtering by beginner, expert, guru and search term4.Camera image with information display e.g. of the captured frames, frame rate (fps) and size (height andwidth in pixels)Fig. 4: SICK Vision Cockpit8.2 Command line toolsUse the handy command line tools e.g. to automatically configure several cameras.The sick_cmdtools shortcut gives you quick access to the command line tools and the SICK Vision Cockpit.·Configuring a camera·Configuring network settings·Updating the camera firmware8.2.1 Configuring a camerasick_devicecommand provides you with information about all available camera settings via the GenICam interface and allows you to configure the camera directly. This tool is intended for expert users.You can list further options with:sick_devicecommand --helpFig. 5: sick_devicecommand8.2.2 Configuring network settingsWith sick_ipconfig you can query and configure the network settings of the cameras.You can list further options with:sick_ipconfig --helpWith a special, interactive mode, you can configure the IP address easily with dialog guidance:sick_ipconfig --interactiveFig. 6: sick_ipconfigYou can also configure the IP address using the graphical interface of SICK Vision Cockpit.8.2.3 Updating the camera firmwareUse the firmware update tool sick_deviceupdate to transfer the firmware update to the camera using the GUFfile. The command line tool allows you to choose the camera explicitly for the update.(GUF file version >= 1.5).1.Make sure that GigE Vision cameras have a valid IP address.2.Open the command line tool in the GUF directory.3.List all available cameras with:sick_deviceupdate --list-all4.You can also list all available cameras with their current firmware version:sick_deviceupdate --list-device-versions5.Select a camera based on the last digits of its serial number and start the update, e.g.sick_deviceupdate -s *7362 -U --guf c:\GUF\<model-name>-C.guf6.Confirm the update with "y".A firmware update can take several seconds. Wait until it is finished.You can list further options with:sick_deviceupdate --helpFig. 7: sick_deviceupdate8.3 Executable samplesC++C#- A -Abbreviations 9- C -Cameraconfigure 13parameter 13 Command line 12- D -DeviceTree 15- F -Firmwareupdate 14- G -GenApi 6GenICam 6GenTLbuffer 7consumer 7device 7GenTL Consumer 6GenTL Producer 6interface 7producer 7stream 7system 7GenTL SFNC 6, 8 GetFirstPixel 15- I -IP addressconfigure 13set 13- L -LegoTrigger 15- N -Network 13- O -OpenCamera 15 OpenCameraBySerNo 15 OpenCameraSelectCti 15- S -Sample 11, 15SFNC 6SICK LibIMG 11SICK Vision API 11 SICK Vision Cockpit 11 overview 12SICK Vision Suite 5, 10 application 12part 11 SimpleLiveQml 15 SimpleLiveQtWidgets 15- T -Toolcommand line 12 Transport Layer 11- U -Updatefirmware 14- W -WalkThrough 15Detailed addresses and further locations at AustraliaPhone +61 (3) 9457 06001800 33 48 02 – tollfreeE-Mail **************.au AustriaPhone +43 (0) 2236 62288-0 ********************Belgium/LuxembourgPhone +32 (0) 2 466 55 66 ******************BrazilPhone +55 11 3215-4900 ************************.br CanadaPhone +1 905.771.1444 ************************Czech RepublicPhone +420 234 719 500 ******************ChilePhone +56 (2) 2274 7430 E-Mail **************ChinaPhone +86 20 2882 3600 E-Mail *******************.cn DenmarkPhone +45 45 82 64 00 ******************FinlandPhone +358-9-25 15 800 ******************FrancePhone +33 1 64 62 35 00 ******************GermanyPhone +49 (0) 2 11 53 010 ******************GreecePhone +30 210 6825100 E-Mail ***************.gr Hong KongPhone +852 2153 6300 E-Mail ************.hkHungaryPhone +36 1 371 2680 *************************IndiaPhone +91-22-6119 8900 *************************IsraelPhone +972 97110 11***************************ItalyPhone +39 02 27 43 41 ******************JapanPhone +81 3 5309 2112 *********************MalaysiaPhone +603-8080 7425 *************************MexicoPhone +52 (472) 748 9451 *********************NetherlandsPhone +31 (0) 30 229 25 44 ******************New ZealandPhone +64 9 415 04590800 222 278 – tollfreeE-Mail *************.nz NorwayPhone +47 67 81 50 00 ******************PolandPhone +48 22 539 41 00 ******************RomaniaPhone +40 356-17 11 20 E-Mail **************RussiaPhone +7 495 283 09 90 ******************SingaporePhone +65 6744 3732 ************************SlovakiaPhone +421 482 901 201 *********************SloveniaPhone +386 591 78849 ********************South AfricaPhone +27 10 060 0550****************************.za South KoreaPhone +82 2 786 6321/4 ************************SpainPhone +34 93 480 31 00 ******************SwedenPhone +46 10 110 10 00 ******************SwitzerlandPhone +41 41 619 29 39 *********************TaiwanPhone +886-2-2375-6288 ********************.tw ThailandPhone +66 2 645 0009 ************************TurkeyPhone +90 (216) 528 50 00 *******************.tr United Arab EmiratesPhone +971 (0) 4 88 65 878 *********************United KingdomPhone +44 (0)17278 31121 ******************.uk USAPhone +1 800.325.7425 *******************VietnamPhone +65 6744 3732 ************************SICK AG | Waldkirch | Germany | 8025622/0000/2020-04/e n。
罗莎TP by 基亚·马杆件手册说明书

T h e A R T O F D E S I G NKia Ma is widely known among tour professionals as a quiet master of the art of putter-making. Revered for his unerring sense of shape, detail and purity, Kia’s designs are universally embraced for their beauty, feel and playability. To hold, examine and stroke one is to grasp the difference between an ordinary putter and a Rossa® TP by Kia Ma putter.Each of Kia's works is a jewel, honed by the skilled hands and practiced eye of a genius. Look and touch and you’ll find that every edge, curve and surface has been composed with the utmost precision, balance and care. 100% milled from end to end from 304 stainless steel, enveloped in a beautiful high polish and silver mist finish, each individual club is crafted to meet the discriminating player’s need for exquisite form, feel and function.NEW FOR 2010TP DAYTONA TP MONACO TP FONTANAPutters of Rare Beauty and Performanceby Master Putter Craftsman Kia Ma DETAILS THAT MATTEREvery TP by KIA MA putter:Is milled end to end from 100% forged 304stainless steel.Incorporates movable micro-weights tocustomize feel.Features our Titallium insert and patentedAGSI+ technology to promote true roll.Is finished with a combination of two typesof surfaces, high-polish and new non-glaresilver-mist.FEATURES ADVANTAGES BENEFITS100% milledfrom 304 stainless steelEvery detailis renderedperfectly andbeautifullyThe differencebetween anordinary putterand a finelycrafted putterAdjustable Micro-Movable weights Change theputterheadweightCustomize thefeel to suit yourpreference andstrokeAGSI+ Titallium face insert Negates backspinand promotesforwardspinGreat roll andcontrol; soft andsolid feelROSSA TP bY KIA MA SPecIfIcATIOnSMODeL Description HeadMaterialHosel Offset LengthLeftHandHeadWeightShaft Loft Lie Grip InsertToeDowncustomOptionsDaytona DaytonaBlade Shape Forged 304Stainless Steel#1Full Shaft34, 35YES345g Stepless - Shaftin Cup3.570Lamkin RubberCrossboneAGSI+Titallium35ºLie +/-2 degMonaco MonacoBlade Shape Forged 304Stainless Steel#81/2 Shaft34, 35NO345g Stepless - FlareTip - Shaft Over3.570Lamkin RubberCrossboneAGSI+Titallium55ºLie +/-2 degFontana FontanaMallet Shape Forged 304Stainless Steel#71/2 Shaft34, 35NO345g Stepless - SingleBend3.570Lamkin RubberCrossboneAGSI+TitalliumFaceBalancedLie +/-2 deg。
2020年新款哈利地维骑车说明书

N E W2020 R A N G ENew rides. New thrills.That’s the great thing about true icons, they always know how tosurprise you. And the 2020 Harley-Davidson® range gives you all theperformance and power you expect, but with plenty you didn’t.Our range has grown to give you even more ways to expand yourheadspace. With all-new bikes, like the blacked-out L ow Rider™ S,sublime Road Glide® Limited touring machine, and LiveWire™ – thefirst ever electric Harley-Davidson.There’s also new tech, such as Reflex™ Defensive Rider Systemsadvanced traction control, and H-D™ Connect, which gives you bikeand journey stats straight to your smartphone.That’s not the whole story. This brochure is just a taste of what’snew, but you can find out about all our models in the spec sectionat the back, dropping by your local dealer or checking out .So take time out to relax and explore our whole range. There’s a newHarley-Davidson for every rider, but which ride is made for you?C O L O U R S 3D I ME N S I O N S 1P O W E R T R A I N C H A R G I N G P E RF O R M A N C E I N F O T A I N M E N TStreet®Length (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci)Fuel Economy (l/100 km/mpg)2TransmissionSolidCustomLength (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci)Fuel Economy (l/100 km/mpg)2TransmissionSolidDIMENSIONS1DIMENSIONS1POWERTRAINPOWERTRAIN2,185 (86)760 (29.9)1,515 (59.6)12.5 (3.3)247 (545)256 (564)Air-cooled, Evolution883 (53.9)4.6 l/100 km (51 mpg)5-speedBlack DenimBarracuda Silver DenimRiver Rock GrayScorched Orange/Silver Flux2,200 (86.6)735 (28.9)1,515 (59.6)12.5 (3.3)248 (547)256 (564)Air-cooled, Evolution1,202 (73.4)4.9 l/100 km (48 mpg)5-speedVivid BlackBarracuda SilverBilliard BlueCOLOURS3COLOURS3I ro n883™X L883NI ron 1200™X L 1200N SLength (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci)Fuel Economy (l/100 km/mpg)2TransmissionSolidDIMENSIONS1Stree t Rod®XG750APOWERTRAIN2,130 (83.9)765 (30.1)1,510 (59.4)13.1 (3.5)229 (505)238 (525)Liquid-cooled,Revolution® X V-Twin749 (46)4.4 l/100 km (54 mpg)6-speed constant mesh spur gearVivid BlackRiver Rock Gray DenimStone Washed White PearlPerformance OrangeCOLOURS3Length (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci)Fuel Economy (l/100 km/mpg)2TransmissionSolidDeluxeDIMENSIONS1H ar ley-D avid so nStreet® 750XG750POWERTRAIN2,215 (87.2)720 (28.3)1,520 (59.8)13.1 (3.5)223 (492)233 (514)Liquid-cooled,Revolution® X V-Twin749 (46)4.3 l/100 km (55 mpg)6-speed constant mesh spur gearVivid BlackBlack DenimPerformance OrangeVivid Black DeluxeBarracuda Silver DeluxeCOLOURS3Length (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci)Fuel Economy (l/100 km/mpg)2TransmissionSolidDeluxeDIMENSIONS1Harl ey-Dav i dso nS treet®500XG500POWERTRAIN2,215 (87.2)720 (28.3)1,520 (59.8)13.1 (3.5)223 (492)233 (514)Liquid-cooled,Revolution® X V-Twin494 (30)3.6 l/100 km (64 mpg)6-speed constant mesh spur gearVivid BlackBlack DenimPerformance OrangeVivid Black DeluxeBarracuda Silver DeluxeCOLOURS3Stre e t Bob ®F X B BSoftailLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionSolidTwo-ToneD I ME N S I O N S 1P O W E R T R A I N2,320 (91.3)680 (26.8) 1,630 (64.2)13.2 (3.5)286 (630)297 (655)Milwaukee-Eight ® 1071,746 (107)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid Black Barracuda Silver Denim River Rock Gray Spruce Billiard Red/Vivid BlackC O L O U R S 3Length (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid D I M E N S I O N S 1P O W E R T R A I N2,185 (86)785 (30.9)1,505 (59.3)12.5 (3.3)250 (551)259 (571)Air-cooled, Evolution1,202 (73.4)4.9 l/100 km (48 mpg)5-speedVivid Black Black DenimStone Washed White PearlPerformance OrangeC O L O U R S 3Ro ads ter ™X L 1200CXLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid Custom D I M E N S I O N S 1P O W E R T R A I N2,165 (85.2)710 (28)1,495 (58.9)7.9 (2.1)247 (545)252 (556)Air-cooled, Evolution 1,202 (73.4)4.9 l/100 km (48 mpg)5-speedVivid BlackRiver Rock Gray Denim Stone Washed White Pearl Performance OrangeStiletto RedC O L O U R S 3Fo rty-E i ght ®XL 1200XLow Ride r ™ SF X LRSL ow Rid er ™F X LRLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid Length (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid D I M E N S I O N S 1D I ME N S I O N S 1P O W E R T R A I NP O W E R T R A I N2,355 (92.7)690 (27.2)1,630 (64.2)18.9 (5)287 (633)300 (661)Milwaukee-Eight ® 1071,746 (107)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid BlackBilliard Blue Billiard RedStone Washed White PearlC O L O U R S 3C O L O U R S 32,355 (92.7)690 (27.2)1,615 (63.6)18.9 (5)295 (650)308 (679)Milwaukee-Eight ® 1141,868 (114)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid BlackBarracuda SilverSoftail®S po rt G lid e ®F LS BLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission SolidCustom D I M E N S I O N S 1P O W E R T R A I N2,325 (91.5)680 (26.8)1,625 (64)18.9 (5)304 (670)317 (699)Milwaukee-Eight ®1071,746 (107)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid Black Midnight BlueRiver Rock Gray Denim Performance Orange Tahitian TealScorched Orange/Silver FluxC O L O U R S 3Sof tai l Sli m ®FLSLLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid D I M E N S I O N S 1P O W E R T R A I NC O L O U R S 32,310 [90.9]660 [26]1,630 [64.2]18.9 [5]291 (642)304 (671)Milwaukee-Eight ®1071,746 (107)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid Black Black DenimBarracuda Silver Denim Billiard BurgundyDelu xeF LD ELength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid Two-Tone CustomD I ME N S IO N S 1P O W E R T R A I NC O L O U R S 32,415 (95.1)680 (26.8) 1,630 (64.2)18.9 (5)303 (668)316 (697)Milwaukee-Eight ®1071,746 (107)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid Black Midnight BlueStone Washed White PearlBilliard Red/Vivid Black Scorched Orange/Silver FluxHe ri tage Class icF LH CLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionSolid Two-Tone CustomD I ME N S I O N S 1P O W E R T R A I NC O L O U R S 32,415 (95.1)680 (26.8)1,630 (64.2)18.9 (5)316 (697)330 (728)Milwaukee-Eight ®1071,746 (107)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid Black Billiard Burgundy Silver Pine/Spruce Billiard Red/Vivid Black Tahitian TealHe ritage C lass ic 114F LH CSLength (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionSolid Two-Tone Custom D I M E N S I O N S 1P O W E R T R A I NC O L O U R S 32,415 (95.1)680 (26.8)1,630 (64.2)18.9 (5)316 (697)330 (728)Milwaukee-Eight ®1141,868 (114)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid Black Billiard Burgundy Silver Pine/Spruce Billiard Red/Vivid Black Tahitian TealScorched Orange/Silver FluxBreako ut ® 114F XB R SLength (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission SolidCustom DI M E N S I O N S 1P O W E R T R A I NC O L O U R S 32,370 (93.3)665 (26.2)1,695 (66.7)13.2 (3.5)294 (648)305 (672)Milwaukee-Eight ®1141,868 (114)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid Black Midnight Blue Barracuda Silver River Rock Gray Denim Performance OrangeStiletto RedZephyr Blue/Black SungloF X DR ™ 114F X DR SLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid D IM E NS I O N S 1P OW E R T R A I N2,425 (95.5)720 (28.3)1,735 (68.3)16.7 (4.4)289 (637)303 (668)Milwaukee-Eight ®1141,868 (114)5.4 l/100 km (44 mpg)6-Speed Cruise Drive ™Vivid Black Black DenimBarracuda Silver Denim River Rock Gray DenimPerformance Orange C O L O U R S3Fat B ob ® 114F X F BSLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid CustomD I ME N S I O N S 1P O W E R T R A I N2,340 (92.1)710 (28)1,615 (63.6)13.6 (3.6)296 (653)306 (676)Milwaukee-Eight ®1141,868 (114)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid Black Black DenimBarracuda Silver Denim River Rock Gray Denim Performance Orange Stiletto RedC O L O U R S 3Fat Boy ® 114F LF BSLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionSolidTwo-Tone Custom D I M E N S I O N S 1P O W E R T R A I NC O L O U R S 32,370 (93.3)675 (26.6)1,665 (65.6)18.9 (5)304 (671)317 (699)Milwaukee-Eight ®1141,868 (114)5 l/100 km (47 mpg)6-Speed Cruise Drive ™Vivid Black Midnight Blue SpruceRiver Rock Gray/Vivid BlackBarracuda Silver Denim/Black Denim Stiletto RedZephyr Blue/Black SungloS tre et Glid e ® S pecialF LH XSTouringStre e t G lide ®FLHXRoad Ki n g ®F LH RRo ad K ing ® Sp ecialF LHR X SEle ctra Gli de ® Stan da rd F LH TLength (mm /in) Seat Height, Unladen (mm/in) 2Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid Two-Tone CustomLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionSolid CustomLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2 Transmission Solid Custom Length (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid Custom D I M E N S I O N S 1D I ME N S I O N S 1D I ME N S I O N S 1D I ME N S I O N S 1D I ME N S I O N S 1P O W E R T R A I NP O W E R T R A I NP O W E R T R A I NP O W E R T R A I NP O W E R T R A I N2,450 (96.5)705 (27.8)1,625 (64)22.7 (6)360 (794)375 (828)Milwaukee-Eight ®1071,746 (107)5.5 l/100 km (43 mpg)6-Speed Cruise Drive ™Vivid Black Billiard RedStone Washed White PearlSilver Pine/Spruce Stiletto Red2,420 (95.3)695 (27.4)1,625 (64)22.7 (6)351 (774)366 (807)Milwaukee-Eight ®1141,868 (114)5.5 l/100 km (43 mpg)6-Speed Cruise Drive ™Vivid Black Barracuda Silver River Rock Gray Denim Billiard BurgundyZephyr Blue/Black Sunglo2,400 (94.5)680 (26.8)1,625 (64)22.7 (6)354 (781)372 (820)Milwaukee-Eight ®1071,746 (107)5.5 l/100 km (43 mpg)6-Speed Cruise Drive ™Vivid Black2,450 (96.5)695 [27.4]1,625 (64)22.7 (6)361 (796)376 (829)Milwaukee-Eight ®1071,746 (107)5.5 l/100 km (43 mpg)6-Speed Cruise Drive ™Vivid Black Black Denim Midnight Blue Barracuda SilverStiletto RedTahitian Teal2,425 (95.5)690 (27.2)1,625 (64)22.7 (6)359 (792)375 (827)Milwaukee-Eight ®1141,868 (114)5.5 l/100 km (43 mpg)6-Speed Cruise Drive ™Vivid BlackRiver Rock Gray Denim Billiard BurgundyStone Washed White Pearl Performance Orange Scorched Orange/Silver FluxZephyr Blue/Black SungloC O L O U R S 3C O L O U R S 3C O L O U R S 3C O L O U R S 3C O L O U R S 3Length (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionSolidRoad Glide ® Sp ecialF LT R X SCruisecontrolMilwaukee- Eight ®114Milwaukee- Eight ®107Ro ad Gl i de ®FLTR X Roa d Gli de ® Lim ite dFLT R KLength (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionSolidCustom Length (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid CustomD I ME N S I O N S 1D I ME N S I O N S 1P O W E R T R A I NP O W E R T R A I N2,430 (95.7)695 (27.4)1,625 (64)22.7 (6)372 (820)388 (855)Milwaukee-Eight ®1071,746 (107)5.5 l/100 km (43 mpg)6-Speed Cruise Drive ™Vivid Black Barracuda Silver River Rock Gray Denim SpruceStiletto Red Tahitian Teal C O L O U R S 3C O L O U R S 32,430 (95.7)695 (27.4)1,625 (64)22.7 (6)371 (818)387 (853)Milwaukee-Eight ®1141,868 (114)5.5 l/100 km (43 mpg)6-Speed Cruise Drive ™Vivid BlackBarracuda Silver Denim River Rock Gray Billiard RedScorched Orange/Silver FluxZephyr Blue/Black SungloLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineD I ME N S I O N S 1P O W E R T R A I N2,600 (102.3)740 (29.1)1,625 (64)22.7 (6)399 (880)416 (917)Twin-Cooled ™Milwaukee-Eight ®114C O L O U R S 3Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionSolid - Chrome Solid - Black finish 1,868 (114)5.5 l/100 km (43 mpg)6-Speed Cruise Drive ™Vivid Black Barracuda Silver Vivid BlackRiver Rock GrayTwo-Tone - Chrome Two-Tone - Black finish Custom - Chrome Custom - Black finish C O L O U R S 3Midnight Blue/Barracuda SilverRiver Rock Gray/Vivid Black Silver Pine/SpruceRiver Rock Gray/Vivid BlackBarracuda Silver Denim/Black DenimStiletto Red Tahitian TealScorched Orange/Silver FluxZephyr Blue/Black SungloLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineD I ME N S I O N S 1P O W E R T R A I N2,595 (102.2)735 (28.9)1,625 (64)22.7 (6)407 (897)423 (932)Twin-Cooled ™ Milwaukee-Eight ® 114C O L O U R S 3Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionSolid - Chrome Solid - Black finish 1,868 (114)5.5 l/100 km (43 mpg)6-Speed Cruise Drive ™Vivid Black Midnight Blue Vivid BlackRiver Rock GrayTwo-Tone - Chrome Two-Tone - Black finish Custom - Chrome Custom - Black finish C O L O U R S 3River Rock Gray/Vivid Black Silver Pine/SpruceBarracuda Silver Denim/Black Denim Billiard Red/Vivid BlackStiletto Red Tahitian TealScorched Orange/Silver FluxZephyr Blue/Black SungloUltra Li mit edFLH T KFreewh ee l er ®F LRTTri G lide ® U lt raF LHTC U TGC VO St re et G lid e ®F LH X S ETrikeCVOCruise controlMilwaukee- Eight ®114Milwaukee- Eight ®107Length (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission Solid CustomD I ME N S I O N S 1P O W E R T R A I N2,615 (103)700 (27.6)1,670 (65.7)22.7 (6)492 (1,085)507 (1,118)Milwaukee-Eight ®1141,868 (114)5.5 l/100 km (43 mpg)6-Speed Cruise Drive ™Vivid BlackBarracuda Silver Denim Performance Orange Stiletto RedC O L O U R S 3Length (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionSolid Two-Tone CustomLength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)Engine Displacement (cc/ci) Fuel Economy (l/100 km/mpg)2TransmissionCVO D I M E N S I O N S 1D I ME N S I O N S 1P O W E R T R A I NP O W E R T R A I N2,670 [105.1]735 (28.9)1,670 (65.7)22.7 (6)546 (1,204)564 (1,243)Twin-Cooled ™Milwaukee-Eight ®1141,868 (114)5.6 l/100 km (42 mpg)6-Speed Cruise Drive ™Vivid Black Spruce Midnight Blue/Barracuda Silver River Rock Gray/Vivid Black Tahitian Teal2,435 (95.9)690 (27.2)1,625 (64)22.7 (6)377 (831)393 (866)Milwaukee-Eight ®1171,923 (117)5.7 l/100 km (41 mpg)6-Speed Cruise Drive ™Black Stardust Fade Smoky Gray & Black HoleSand Dune C O L O U R S 3C O L O U R S 3C VO Tri Glide ®F LH TCUTG SELength (mm /in)Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs) (kg/lbs)EngineDisplacement (cc/ci)Fuel Economy (l/100 km/mpg)2Transmission CVO D I M E N S I O N S 1P O W E R T R A I NC O L O U R S 3C VO L imi te dFLH TK S ELength (mm /in) Seat Height, Unladen (mm/in)Wheelbase (mm /in)Fuel Capacity (liters/U.S. gals)Weight, As Shipped (kg/lbs)Weight, In Running Order (kg/lbs)EngineDisplacement (cc/ci) Fuel Economy (l/100 km/mpg)2Transmission CVO D I M E N S I O N S 1P O W E R T R A I N2,600 (102.4)760 (29.9)1,625 (64)22.7 (6)411 (906)428 (944)Twin-Cooled ™Milwaukee-Eight ®1171,923 (117)5.7 l/100 km (41 mpg)6-Speed Cruise Drive ™Moonlight Blue & Deep Sea Blue Smoky Gray & StormcloudSand DuneC O L O U R S 32,670 (105.1)715 (28.1)1,670 (65.7)22.7 (6)563 (1,239)577 (1,269)Twin-Cooled ™Milwaukee-Eight ®1171,923 (117)5.9 l/100 km (40 mpg)6-Speed Cruise Drive ™Blizzard White Pearl w/ Lightning Silver & Stormcloud Black Stardust w/Magnetic Gray & Wicked RedBILLIARD BURGUNDY BILLIARD BLUEPERFORMANCE ORANGE STONE WASHED WHITE PEARLVIVID BLACK RIVER ROCK GRAY RIVER ROCK GRAY DENIMBARRACUDA SILVER BARRACUDA SILVER DENIM SPRUCEBLACK DENIM MIDNIGHT BLUESOLID SMOKY GRAY & BLACK HOLEBLACK STARDUST FADE SAND DUNESMOKY GRAY & STORMCLOUDMOONLIGHT BLUE & DEEP SEA BLUE CVOBLIZZARD WHITE PEARL W/ LIGHTNING SILVER & STORMCLOUDBLACK STARDUSTW/ MAGNETIC GRAY & WICKED REDZEPHYR BLUE/ BLACK SUNGLOTAHITIAN TEALSTILETTO REDSCORCHED ORANGE/SILVER FLUXC USTO M T WO TON EMIDNIGHT BLUE/BARRACUDA SILVERSILVER PINE/SPRUCEBILLIARD RED/VIVID BLACKRIVER ROCK GRAY/ VIVID BLACKBARRACUDA SILVER DENIM/BLACK DENIMYour choice of paint is a reflection of your inner spark. When the light catches it just right, you can see someone’s soul in the choice of finish. Fortunately, the Harley-Davidson Motor Company is renowned for the depth, richness and longevity of its colour. This year, we’ve added new solid colours, new two-tones and nine expansive, new finishes for CVO models so you can shine as bright as you want to.The information printed in this brochure reflects product design, fabrication and component parts at the date of printing.IMPORTANT - PLEASE READ:The information printed in this brochure reflects product design, fabrication and component parts at the date of printing. 1. Vehicles depicted may differ from vehicles manufactured and delivered. Specifications and prices listed may differ from specifications and prices of vehicles manufactured and delivered. All product descriptions (including depictions, specifications, dimensions, measurements, ratings and competitive comparisons) are based on the information available at the time of publication. Although such descriptions are believed correct, errors and changes can occur and complete accuracy cannot be guaranteed. Harley-Davidson may make changes and at any time to prices and specifications and may change or discontinue models without notice and without incurring any obligation. Attention: Vehicles in the configurations shown and many of the accessories described in this catalog may not be available for sale or use in some locations. Please check with your dealer for complete product details and the latest information. All models feature 6-speed transmission (Sportster models are 5-speed) and carbon fiber belt final drive; multi-plate clutch with diaphragm spring in oil bath; and two-year, unlimited mileage warranty. 2. The combined fuel economy numbers were derived using a combination of estimated city and highway values. Fuel economy estimates are derived from US EPA exhaust emission certification data on a sample motorcycle from the corresponding family under ideal laboratory conditions. Your actual fuel economy will vary depending on your personal riding habits, road and driving conditions, vehicle condition and maintenance, tire pressure, vehicle configuration (parts and accessories), and vehicle loading (cargo, rider and passenger weight). Break-in mileage may vary. 3. Availability of colours may vary from dealer to dealer.ORANGE FUSEYELLOW FUSE。
STIHL MS 193 T 专业树木使用类型 chainsaw 说明书

MS 193 T Specifications Professional InTree Use Only DISPLACEMENT30.1 cc (1.84 cu. in.)ENGINE POWER1.3 kW (1.74 bhp)POWERHEAD WEIGHT3.3 kg (7.28 lbs)FUEL CAPACITY270 cc (9.1 oz)CHAIN OIL CAPACITY220 cc (7.4 oz)OILOMATIC® CHAIN 3/8" PMNew STIHL MS 193 T Packed with Features for ProfessionalsCompact Design and Fuel Efficiency Provide Great Value for Tree CareProfessionalsRelease Date: 4/15/2015Press Inquiries:Lindsy Shrewsberry (757) 4869286All other inquiries:STIHL Incorporated (757) 4869100VIRGINIA BEACH, Va. – The STIHL MS 193 T is the newest addition to the extensive line of STIHL chain saws designed for arborists and tree care professionals. Its fuel efficiency and improved technology make it an ideal choice for the demanding professional who wants a premium, tophandle chain saw for intree cutting.“This chain saw is built for experts looking for great value along with professional features,” said Kent Hall,STIHL Inc. senior p roduct m anager. “It packs 1.3 kW of power and is 20 percent more fuel efficient as compared to the previous model*, which reduces down time and fuel costs.” It also produces 65 percent fewer exhaust emissions as compared to the previous model*, significantly lowering its environmental impact.Advanced engine technology in the MS 193 T delivers peak performance in a variety of conditions. The IntelliCarb ™Compensating Carburetor automatically adjusts the air/fuel ratio to maintain the engine’s RPM when the air filter becomes restricted.This chain saw was designed with the tree care professional in mind. The compact, tophandled design, low weight, and superior powertoweight ratio make it ideal intree work. Low vibration and good ergonomics make it maneuverable, comfortable to operate and reduces operator fatigue.This easytooperate STIHL product is proudly built in America** for the demanding professional who wants a premium saw at an affordable price.For more information on the STIHL MS 193 T visit: /.*As compared to STIHL MS 192 TAbout STIHL Inc.STIHL Inc. manufactures the number one selling brand of gasolinepowered handheld outdoor power equipment in America,* as well as the number one selling brand of chain saws in the world. STIHL products are sold through servicing power equipment retailers from coast to coast – not mass merchants.Located in Virginia Beach , Va., STIHL Inc., the headquarters for U.S. operations for the worldwide STIHL Group, exports to over 90 countries around the world; and the majority of STIHL products sold in America are also built in America .* STIHL products sold through U.S. STIHL dealers are for distribution in the United States only. For more information or for the name of a local STIHL retailer, call toll free 1800GO STIHL (18004678445), visit or text your zip code to 78445.*A majority of STIHL powerheads are built in the United States from domestic and foreign parts andcomponents. "Number one selling brand" is based on syndicated Irwin Broh Research as well as independent consumer research of 20092014 U.S. sales and market share data for the gasolinepowered handheld outdoor power equipment category combined sales to consumers and commercial landscapers.STIHL is pleased to support the work of Independent We Stand , the Tree Research and Education Endowment Fund (TREE Fund), International Society of Arboriculture (ISA), the Tree Care Industry Association (TCIA), National FFA , National Association of Landscape Professionals , the National Recreation and Parks Association , the National Association of State Park Directors and the North American Retail Hardware Association .For information on job opportunities with STIHL Inc., please go to . STIHL is an EEO and drugfree work environment.# # #GUIDE BAR LENGTHS* (Recommended ranges)35 cm (14")STIHL ROLLOMATIC® EPOWER SOURCE GasSTIHL recommends #3610 (61 PM3 50) OILOMATIC® saw chain and 14" 3005 008 3909 Ematic™ guide bar combination. The actual listed guide bar length can vary from the effective cutting length based on which power head it is installed on.。
ALV_TREE(一:cl_gui_alv_tree_simple)

ALV_TREE(⼀:cl_gui_alv_tree_simple)最近⼀直在做⼀个树形展⽰的东西。
开始的时候⼀直⽤cl_gui_alv_tree_simple 这个类⾸先建⼀个屏幕 9001画⼀个容器,取名:TREE定义数据:*功能码返回值DATA: ok_code TYPE sy-ucomm,save_ok TYPE sy-ucomm.DATA:wa_container_tree TYPE scrfname VALUE 'TREE', "wa_custom_container_tree TYPE REF TO cl_gui_custom_container,"tree_grid TYPE REF TO cl_gui_alv_tree_simple.DATA: gb_fieldcat TYPE lvc_t_fcat. "控制输出列DATA: gb_sortfld TYPE lvc_t_sort. "控制节点"定义事件注册类(使⽤双击事件)*----------------------------------------------------------------------** INCLUDE BCALV_TREE_EVENT_REC_DRAGDROP **----------------------------------------------------------------------*CLASS cl_tree_event_receiver DEFINITION.PUBLIC SECTION.* double click itemMETHODS handle_double_clickFOR EVENT node_double_click OF cl_gui_alv_tree_simpleIMPORTING index_outtabgrouplevel.ENDCLASS. "CL_TREE_EVENT_RECEIVER DEFINITION*---------------------------------------------------------------------** CLASS CL_TREE_EVENT_RECEIVER IMPLEMENTATION*---------------------------------------------------------------------*CLASS cl_tree_event_receiver IMPLEMENTATION.METHOD handle_double_click.CHECK NOT index_outtab IS INITIAL."获取当前⾏READ TABLE gt_show(数据内表) INTO l_wa_data INDEX index_outtab.if sy-subrc = 0."事件操作endif.ENDMETHOD. "HANDLE_DOUBLE_CLICKENDCLASS. "CL_TREE_EVENT_RECEIVER IMPLEMENTATION下⾯是创建树的过程:FORM zform_create_tree.IF wa_custom_container_tree IS INITIAL."事件相关DATA: tree_event_receiver TYPE REF TO cl_tree_event_receiver.CREATE OBJECT tree_event_receiver."报表头DATA ls_list_comm TYPE slis_t_listheader.DATA ls_alist_comm TYPE slis_listheader.ls_alist_comm-typ = 'H'.ls_alist_comm-info = '报表'.APPEND ls_alist_comm TO ls_list_comm."填充输出结构PERFORM zform_fieldcat."控制输出层次PERFORM zform_field_level.CREATE OBJECT wa_custom_container_treeEXPORTINGcontainer_name = wa_container_tree.CREATE OBJECT tree_gridEXPORTINGi_parent = wa_custom_container_tree.CALL METHOD tree_grid->set_table_for_first_displayEXPORTINGit_list_commentary = ls_list_comm" i_structure_name = 'ZTEST_SHOW' "se11建的想要展⽰的结构CHANGINGit_sort = gb_sortfldit_fieldcatalog = gb_fieldcatit_outtab = gt_show[]. "数据表CALL METHOD tree_grid->expand_treeEXPORTINGi_level = 1."调⽤事件** register eventsPERFORM register_events.** set handler for tree1SET HANDLER tree_event_receiver->handle_double_click FOR tree_grid. ENDIF.ENDFORM.控制输出字段FORM zform_fieldcat.CALL FUNCTION 'LVC_FIELDCATALOG_MERGE'EXPORTINGi_structure_name = 'ZTEST_BJH_CHECK_SHOW1'CHANGINGct_fieldcat = gb_fieldcat.DATA ls_fldcat TYPE lvc_s_fcat.LOOP AT gb_fieldcat INTO ls_fldcat.ls_fldcat-hotspot = 'X'.CASE ls_fldcat-fieldname.WHEN字段某某ls_fldcat-outputlen = 15. "设置长度是15WHEN OTHERS.ls_fldcat-no_out = 'X'. "不需要显⽰的设置为不输出ENDCASE.IF ls_fldcat-fieldname = 'TSLVT'. "对TSLVT(⾦额)字段进⾏求和* ls_fldcat-do_sum = 'X'.ENDIF.MODIFY gb_fieldcat FROM ls_fldcat.ENDLOOP.ENDFORM. "zform_fieldcat"控制展现层次(第⼀层是地区,第⼆层是上级科⽬,第三层是⽬标科⽬FORM zform_field_level.DATA:l_index TYPE int4 VALUE '1'.DATA ls_sortfld TYPE lvc_s_sort.ls_sortfld-spos = l_index.ls_sortfld-fieldname = 'QYDM'. "区域 "ls_sortfld-up = 'X'.ls_sortfld-subtot = 'X'.APPEND ls_sortfld TO gb_sortfld.l_index = l_index + 1.ls_sortfld-spos = l_index.ls_sortfld-fieldname = 'HKONT_PREV'. "上级科⽬编号 "ls_sortfld-up = 'X'.ls_sortfld-subtot = 'X'.APPEND ls_sortfld TO gb_sortfld.l_index = l_index + 1.ls_sortfld-spos = l_index.ls_sortfld-fieldname = 'HKONT'. "科⽬编号 "ls_sortfld-up = 'X'.ls_sortfld-subtot = 'X'.APPEND ls_sortfld TO gb_sortfld.l_index = l_index + 1.ENDFORM. "zform_field_level最后类似这样的结果欢迎关注订阅号:SAP学习记录(SAPlearning )。
Unity 5.6 编辑器控件 TreeView 使用手册
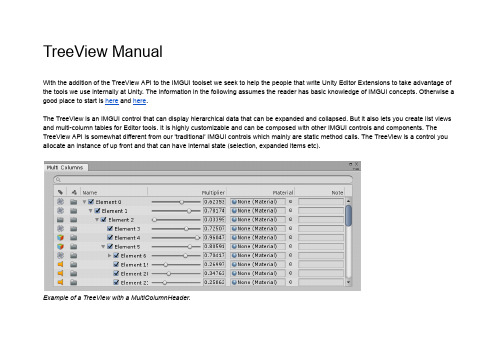
Example of a TreeView with a MultiColumnHeader.
Note that the TreeView is not a Tree Data Model. Therefore you can construct the TreeView using any back-end tree data-structure you prefer. This can be a C# tree model or a Unity based tree structure like the Transform hierarchy. What you should keep in mind is how you persist the data you are modifying with the TreeView. The project with the source code for the examples shown below can be downloaded here.
批注本地保存成功开通会员云端永久保存去开通
TreeView Manual
With the addition of the TreeView API to the IMGUI toolset we seek to help the people that write Unity Editor Extensions to take advantage of the tools we use internally at Unity. The information in the following assumes the reader has basic knowledge of IMGUI concepts. Otherwise a good place to start is here and here. The TreeView is an IMGUI control that can display hierarchical data that can be expanded and collapsed. But it also lets you create list views and multi-column tables for Editor tools. It is highly customizable and can be composed with other IMGUI controls and components. The TreeView API is somewhat different from our 'traditional' IMGUI controls which mainly are static method calls. The TreeView is a control you allocate an instance of up front and that can have internal state (selection, expanded items etc).
2000 Camaro Z28 Owner's Manual

2000 Camaro Z28 Owners Manual ==> Download/Read Here
2001 Camaro Owners Manual ___CLICK HERE___ 2000 Chevrolet Camaro Richmond rear end with traction control Built on a 2001 Camaro Z28 chassis. Chevrolet Camaro for factory, Chilton &Haynes service repair manuals. 1997 1998 1999 2000 20, 1993 Chevrolet Camaro Service &Repair Manual Software.
I reviewNJCamaro's 2000 Chevrolet Camaro SS with a manual transmission and limited edition SLP.
2020 volkswagen jetta owners 说明书

Volkswagen Owner's Manuals - view owner's manuals for VW cars in PDF for free! Choose all models: Golf, Pபைடு நூலகம்lo, Passat, Jetta, Toureg, Touran, Atlas, Transfomer! Volkswagen Owner's Manuals - view owner's manuals for VW cars in PDF for free! Choose all models: Golf, Polo, Passat, Jetta, Toureg, Touran, Atlas, Transfomer! Back to Digital Resources We’ve made it easy to access your Owner’s and Radio/Navigation Manuals online. For model year 2012 and newer Volkswagen vehicles, you can view your manuals by entering the 17-digit Vehicle Identification Number (VIN) in the search bar below (Routan not included). The Volkswagen Jetta is classed as a compact car in some countries or a small family car in others. It has gone under many different
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
the 3D molecular viewer recommended for eHiTS®User Guide forCheVi version 6.2 and aboveCopyright © 2006-2008, SimBioSys Inc. - All Rights Reserved. Contents1.Introduction2.Installation3.Working with CheVi1.Main Window2.3D Viewing3.Molecule properties4.Displaying proteins5.Displaying protein surfaces6.Displaying single or multiple molecules7.Superimposing molecules8.Viewing solutions for a docking job9.Displaying molecule surfaces10.Displaying ligand-receptor interactions11.Displaying ligand-receptor surface difference12.Displaying rigid fragments of a moleculeDocking with eHiTS from CheVi4.5.Input file formatsExporting high quality images6.7.Editing molecules and output file formats8.How-To...1.How do I use CheVi to look at eHiTS results?2.How do I close a solution in CheVi, the "File" -> "Close" seems not to be working?9.Bug Reporting1. IntroductionCheVi® (Che mical Vi sualizer) is a 3D molecular viewer primarily developed for the eHiTS® (electronic High Throughput Screening) docking tool, but suitable for many molecular viewing requirements.This user's manual covers the basic operation of CheVi and should provide all the information necessary to start using the program.The current beta version of CheVi is intended to provide users of eHiTS with the ability to view native eHiTS files (*.tma, *.sga, etc.) without the need to convert them to other standard file formats. It also gives the user the ability to examine eHiTS docking results, with corresponding eHiTS scores. CheVi is also able to view several other standard file formats, see section 4. "Input file formats" for details.This is a first generation beta version and is not intended to be a complete molecular modeling package, please check the SimBioSys website on a regular basis for updates of CheVi. SimBioSys values the input of users on all our applications, if you have any suggestions for additional features of CheVi, please contact us at info@simbiosys.ca2. InstallationUsers are advised to use the scripts provided with the CheVi package.Once the self extracting binary is downloaded from the SimBioSys web site (or demo CD), please use it in the following way:Usage: ./CheVi_version_platform.bin <INSTALL_DIRECTORY_PATH>To run CheVi follow the message given during installation. :<prompt>$ ./CheVi_6.1.dw9.4_Linux.bin <INSTALL_DIRECTORY_PATH>Unpacking CheVi files to <INSTALL_DIRECTORY_PATH>Installation successful!You can now run CheVi by typing<INSTALL_DIRECTORY_PATH>./CheVi_6.2/CheViat the prompt.3. Working with CheViMain Window1.The main window of CheVi consists of three areas. The graphical display area on the right displays themolecules/surfaces/etc. The left side bar is split into two areas, the navigation window, on top, and the controlsection, below.The navigation window provides an interface for navigating the various elements (receptor, ligands, solutions, surfaces, interactions, etc) used in a docking job from eHiTS, hence its named. These various elements are displayed in a tree-like structure clearly indicating what each element belongs to. This section also allows opening and closing of various file types supported by CheVi.The control window displays a set of properties that the user can alter to suit his/her own personal viewing preference. Depending on which item is selected in the navigation window, different sets of properties will show up to be edited by the user.3D Viewing2.Zooming, rotating and translating the image is controlled by the mouse."Left click + mouse movement" for rotating"Middle click + mouse movement" for translating"Right click + mouse movement" for zoomingMolecule properties3.All molecules opened in CheVi (see input file formats) are listed in a tree like structure on the navigation window (top-left section). To modify the display properties of each molecule, you must first highlight that molecule element by clicking on it.Upon highlight, the control window (bottom-left section) displays the available display options to view the molecule.Display options:Color: The color menu allows you to change the color scheme of the molecule. Each color scheme changes the color of the carbon atoms to the specified color.Display: Under the display menu you can switch the display from a ball and stick mode to a line drawing mode.When in ball and stick mode, double clicking on the molecule name will open a menu that allows you to alter the size of the atoms (balls) and bonds (sticks).H/Lp: The H/Lp menu allows you to toggle on or off the hydrogens and lone pairs.Labels: Under the Labels menu you can choose various text labels to appear on the molecule (if they were present in the input). These include the ID number, atomic number, residue label and Atomic symbol. Displaying proteins4.To open a protein click on the "Open" button (or use File -> Open ) and traverse your local directory system to find the molecular file you wish to open, and click “Open” or hit the return key.The default mode of CheVi is to view proteins (and all molecules) in ball and stick mode. This can be changed by clicking on the name of the protein(molecule) and selecting the “Line” display “Mode” from the Control window.In a similar manner the color mode of the protein can be changed. NOTE: the color mode alternates automatically for each new molecule opened.eHiTS users will find opening "preprocessed" receptor sites useful when examining docking results. eHiTS, by default, stores all input molecules in native eHiTS file formats under the $HOME/ehits_work/preprocessdirectory.Receptor files can be found in $HOME/ehits_work/preprocess/receptors/<PROTEIN_NAME>/ directory. The files of interest are:1. <PROTEIN_NAME>_protein.tma; the input receptor (complex) converted to tma format, if a complex isused, this will be the "split" receptor with no ligand or waters (see eHiTS manual for more information).2. <PROTEIN_NAME>_protein_clip.tma; this is the clipped receptor, based on the clip file given, and is theactual receptor active site that is used during the docking. This file is often much smaller than the full protein and therefore easier (faster) to view.3. <PROTEIN_NAME>_protein.sga; the SGA file is the surface of the active site as determined by eHiTS.4. <PROTEIN_NAME>_ligand.tma; if eHiTS is ran using the "-complex" option, then eHiTS splits the ligandfrom the receptor. This file is the converted .tma of that split ligand. It is also the reference for the clip box and used as the comparison for RMS calculations.Note: the *.tma files have all the hydrogens and lone pairs, as perceived by eHiTS if they were not included in the input.Displaying protein surfaces5.To view a receptor surface, as calculated and used by eHiTS, click the open button and traverse to the appropriate directory (typically $HOME/ehits_work/preprocess/receptors/<PROTEIN_NAME>/). The eHiTS surface file is saves as a .sga file. First you must change the "Files of types" selection in the open window from "*.pdb, *.mol, ...etc." to "*.sga, *.sgb". Then click on the surface file and select open.Note that it is often important to change the opacity of a surface (so you can view ligands within the surface).This can be done by adjusting the sliding bar in the properties window (under the molecule managementwindow). Note, you must have the surface selected (highlighted) to see this option.In addition to the .sga surface grid file, there is an associated .fga file that contains information about the surface point types used during the eHiTS docking process. When you open a surface grid file (.sga) CheVi will look for the associated .fga file (it will look for the REC_protein_clip.fga file) If it finds the correct .fga file, the surface will be colored based on the surface points of eHiTS.This feature is very useful in examining the interactions found during docking. Becoming familiar with the color scheme of the surface points can help select "good" binding ligands and aid in determining ways to optimize a lead. The legend for the colors is shown in the left-bottom frame.The surface point coloring can be turned off by unchecking the "Color Surface Point Types", this will show thesurface in grey scale. Please see pictures below for color and grey scale protein surfaces.Figure: Showing the interaction color coded clipped protein surface and the grey scale clipped protein surface for1azm.pdb complexTo make viewing binding or docked ligands in the receptor site easier, there are the "Hide Frontface" and "HideBackface" options. These will remove the side of the surface facing the front. Both front and back face options are there since different input refer to different sides of the surface as the front. Thus you may need to try both to get the desired effect.Under the Grid Type pull down menu there are several different grids used within eHiTS. Each can be viewed and analyzed by clicking on them.Surface points can also be displayed by clicking on the “Surface Point” button located at the control window (bottom-left). Each surface point is drawn as a cone shape pointing at the direction of the normal. The color of the cone denotes the type of the surface point as found in the legend in the control window.Two hidden functionalities that have not been exposed with buttons are to show the neighbours of the surface points and to show the atom of the surface point. With the appropriate control for the surface shown in the control window, pressing “Ctrl+W” toggles the surface point neighbours on or off. They are drawn as white wired lines between surface points. “Ctrl+S” toggles the surface point and atom lines. They are drawn as cyan wired lines between surface points and atoms in the molecule.Displaying single or multiple molecules6.Displaying single or multiple molecule files is the same as displaying a protein file. Open the desired file using the open button and traversing to the desired molecule file.If you are opening a multiple ligand file (*.sdf, *.mol2 or *.tma) you will see a properties and navigation window open below the molecular management window. To navigate through the multiple ligands, click on the arrow buttons next to the "Superimpose" button. You can "jump" to a specific molecule by clicking on the "N of M"text box and typing the number of the ligand you wish to see then pressing enter. You can also “jump” to a specific molecule by clicking on the N-th molecule on the Tree.Under the navigation buttons, there is a properties window that shows information from the input file. In an sdf file all the tags and data will be shown in the table. If the sdf file is eHiTS output then the eHiTS docking score will be part of this information (allowing users to examine the scoring of eHiTS).Superimposing molecules7.When viewing a multiple ligand file, you can superimpose selected molecules for comparison purposes, this could be especially useful in examining different poses of a docked ligand. To superimpose molecules to go the top level of the molecule set (called "Solutions" in the picture below and is highlighted in blue), navigate to the molecule of interest (by clicking the arrow keys or typing the number in the N of M box) the click on the"Superimpose" button. You can also change the color of each ligand to help in viewing clarity.Superimposed molecules are highlighted in grey on the tree so you know which molecules are currentlydisplayed. The current molecule would always be highlighted in dark grey as shown in the picture below.Figure: An explanation figure on how to superimpose moleculesOnce you have selected a molecule to superimpose, to remove it, navigate back to the same molecule and click "Superimpose" button again. The molecule number that has been selected to be superimposed is shown in the properties table, called "Superimposed".Viewing solutions for a docking job8.Solutions of a docking job are usually saved in$HOME/ehits_work/results/<RECEPTOR>/<LIGAND>/ehits.tma for the particular receptor and ligand docking job. If you attempt to open the results file in the results directory under ehits_work, with a filename of“ehits_best.tma”, “ehits.tma” or “solutions.sdf”, the entire docking job tree will be created for display. A solution parent node, with receptor, ligand, and the eHiTS solutions child nodes. Expanding each of these child nodes will display that particular molecule for you.This pre-populated tree is a convenience function for the eHiTS user. If CheVi finds the default files used by the eHiTS naming convention, it will populate the tree.Adding additional ligands to an existing solution view is also possible. Click on the eHiTS solution node in the tree structure and click on “add Ligand” button to select a ligand file to be added. If the newly opened ligand file is compatible with the receptor, you can view the interactions or surface difference between this ligand(s) and the previously opened receptor.The advantage of first opening an ehits.tma or a solutions.sdf is that the solution tree organizes the differentcomponents of a docking job into a tree like structure. Many additional information can be shown from this tree.One of the interesting ones include the ligand-receptor interaction points. This will be later elaborated in section3.10 "Displaying ligand-receptor interactions" of the manual.Instead of opening the fore-mentioned file names to get your solution tree, a new way (versions since Aug2006) is now capable of allowing you to select a receptor and a ligand file to open to form a solution tree. From the file menu, choose “Open Receptor/Ligand Pair” and fill up the 2 spaces with the receptor and ligand filenames respectively and click “Open”. Note that if you open a ligand that is not compatible with the receptor, interactions and surface difference may not be generated correctly or at all.Displaying molecule surfaces9.A useful piece of information when analyzing docking results is to be able to see the surface of molecules. CheVigives you the ability to show surfaces for receptor or small molecules. The surface generated is based on the exact surface eHiTS would use during the scoring phase of docking. The surfaces are colored by "Surface Point Type" as defined in eHiTS. For more information of surface point types, please see the eHiTS documentation.To display surfaces, expand the molecule node in the navigation tree. Then expand the surface node (by click on the +). For small molecules this will generate a surface around the ligand. For receptors, the surface should be precalculated in eHiTS preprocess directories and will be read from there.Once the surface is generated for the molecule, it has a similar control as was described in section 3.5"Displaying protein surfaces" in this manual.Displaying ligand-receptor interactions10.The key interaction being made between a ligand and receptor can give the user a lot of information about why the molecule is docked in the pose shown. When looking at an eHiTS solution (by opening either thesolutions.sdf or ehits.tma from the ehits results directory) CheVi allows the user to see the strong interactions between the ligand and receptor.Interactions between the ligand atom and the receptor atom can be shown from within an eHiTS solution tree (see section 3.8 "Viewing solutions for a docking job" for more details). Within a solution tree, each ligand and solution has a child node named “Receptor interaction”. By expanding this node below the molecule, dotted lines will be drawn between the ligand atom and the receptor atom.These lines are colored based on the type of interaction it is. A color legend similar to the one used to color the surface is displayed in the control window (bottom-left).Figure: Interaction lines for the ligand of the 1azm.pdb complex. For interaction number 4, whose type is H on aliphatic (chain) hydrophobic carbon, we also show the distance (4.12 A) of the ligand atom from the receptoratom.Please note that sometimes, an interaction may seem to be drawn floating somewhere off from the molecule. This may be caused by the fact that hydrogens and/or lone pairs of the molecule may not be displayed. Please refer to section 3.3 "Molecule properties" for detail on how to display them.There is an information table in the control window of the interaction display that enumerates some of theproperties for the specific interaction. Eg. The angles of the interaction, the distance, the score, as well as their end atom pairs of the interaction. The score value that is displayed here describes the strength of the specific interaction. Please note that this score does not include atom based contributions, like van-der-Waals force, steric clash, etc, which are being accounted for in the final score for the pose.If you wish to view all the interaction information, simply click the “Export All Info” button to select a file to save all the information into an ascii text file.Displaying ligand-receptor surface difference11.Obtaining useful information from the ligand and receptor surfaces at the same time may sometimes be difficult, especially when both surfaces are relatively close to each other. The surface difference feature shows onlysurfaces of both the ligand and the receptor which are sufficiently close to each other within a specified threshold, measured in Angstrom.Clicking on the “Surface Difference” node of either the original ligand or the docked solutions in the navigation tree will display a set of controls at the bottom left corner of CheVi. The threshold can be modified using the Threshold slider here. The exact measurements are indicated by the number to the right of the slider.Figure: The difference surface of the first docked solution and the receptor of 1azm.pdbAlso, you are able to control the opacity of the surface by sliding the opacity slider. Opacity values range from 0(invisible) to 100(solid)By default, the surfaces are color coded by interaction types. The different types of interaction and itscorresponding colors can be found in the legend at the control window(bottom left corner of CheVi).You can also color the surface difference based on score. Select “Score” from the “Color by” menu in thecontrols section and a legend will appear on screen mapping colors to their specific scores. If you would like to fine-tune this coloring, the min and the max sliders allow you the ability to tune the score colors that you are interested in, so you can zoom in to a specific range of scores for a more detailed perception of the surface. To go back to the default scoring range, just hit the “Default” button.The surface difference can be shown only from within an eHiTS solution tree (see section 3.8 "Viewing solutions for a docking job" for more details). Within a solution tree, each ligand and solution molecule has a child node named “Receptor surface difference”. By expanding this node below the molecule, the surface difference will be drawn between that molecule and the receptor.Displaying rigid fragments of a molecule12.Rigid fragments of a molecule can be seen by expanding the “Rigid Fragment" node beneath the molecule on the display tree. Each rigid fragment is drawn as a polygon and color coded by their chemical features detailed by the legend on the bottom left corner.You can view all of the rigid fragments at once, or select from the drop down which rigid fragment you are interested in. Reducing the opacity of the display may help you see what's underneath the rigid fragment representation.Labels are also available to uniquely identify each piece of rigid fragment used inside eHiTS during its computation.(a)(b)(c)Figure: Ligand of the 1azm.pdb complex in picture (a) fragmented in picture (b) and the fragments shown with an opacity setting of 20% to show both the ligand and the rigid fragments at the same time.4. Docking with eHiTS from CheViBefore starting to do eHiTS docking in CheVi one must configure CheVi with the location of the eHiTS installation. To do this click on "Edit" -> "Configuration" under the main navigation window and set the location of the eHiTS installation directory as shown on the picture below.Figure: The first time you install CheVi and eHiTS you need to set the location of eHiTS for CheVi, i.e. configure thetool for the docking package you will be using.This configuration will be remembered afterwards, so no need to set it again in subsequent start ups of CheVi, only if CheVi or eHiTS is reinstalled then it needs setting again.To start a new eHiTS docking job in CheVi, go to the main navigation window and click on the "New eHiTS Docking" button. As seen on the picture below:Figure: The main window of CheVi, where a new docking job is started by clicking on the "New eHiTS Docking"buttonThis will bring us to a docking job set-up panel with six tabs. The various tabs are shown in the next picture.Tab #1: Input selection Tab #2: Output selection Tab #3: Parameters selectionTab #6: Filtering options Tab #4: Database options Tab #5: Parallel processing /distribution optionsFigure: A glance at all the 6 tabs that belong to "setting up a docking job".For explanation on each of the choices in the tabs please refer to the eHiTS manual. For simplicity purposes we will give an example on how to start an eHiTS job using "1azm.pdb". We will load "1azm.pdb" in the first tab from a local file system. "1azm.pdb" is a PDB complex, and by clicking on the "Complex" toggle button in the first tab the user will let the program automatically split the ligand from the receptor, define and prepare the cavity, populate all the tabs with default options, and by just clicking on one more button called: "Run eHiTS" the user should be able to start docking of the 1azm ligand (a sulfonamide drug) into the receptor of 1azm (oxo-acid lyase). This button can be clicked on from any of the 6 tabs. In the pictures above it is highlighted in the sixth tab, i.e. under the filter options, but can be done under the first tab as well.During the docking the progress is reported and any time the docking can be stopped or cancelled with the "Stop eHiTS" button. When the run is done, one can view the results by clicking on the "View Results" button. From then on the same viewing mechanism is valid as described in the previous sections.a) docking in progress b) docking is done, one can view theresultsFigure: Monitoring the docking job5. Input file formatsThe program support the following 3D input file formats:MDL Molecular files (mol) - note: must be 3D coordinates;SD file format (sd/sdf) - note: must be 3D coordinates;Protein Data Bank files (pdb);Tripos Mol2 files (mol2) - note: must be 3D coordinates;Tagged Molecule Ascii (tma) - native eHiTS format;Tagged Molecule Binary (tmb) - native eHiTS format.Steric Grid Ascii (sga) - native eHiTS receptor surface format;Steric Grid Binary (sgb) - native eHiTS receptor surface format;6. Exporting high quality imagesTo export high quality images of the display screen, use the File -> Export menu to open the export window. In the export window you can browse to find the location you wish to save the output, type the file name and choose a magnification level. The higher the magnification the higher the quality the image will be. Be aware, images can get very large and take up alot of disk space, 4-5 x magnification is often enough for most applications.7. Editing molecules & output file formatsAt this time, there are no Editing capabilities implemented for CheVi. Please make a request if you would like to see this feature implemented.8. How to...1. How do I use CheVi to look at eHiTS results?CheVi has be specifically designed to help users of the eHiTS docking tool examine docking results. To get the most out of CheVi, it is recommended that users open the eHiTS results from the ehits_work directory.Open ehits.tma or solution.sdf from $HOME/ehits_work/results/<receptor_name>/<ligand_name>/By opening this file first, you will create a "eHiTS Solutions" group in CheVi. This group automatically provides all necessary links between ligands and docked solutions, with the associated receptors and surfaces. This will make using CheVi much easier and provide more information.2. How do I close a solution in CheVi, the "File" -> "Close" seems not to be working ?The "File"-> "Close" button works only for the first level of children of the "CheVi" tree-root, as indicated by the red arrows in the picture below:Figure: How to use the "File" -> "Close" option9. Bug ReportingIf a bug is identified the user should submit the description of the problem to SimBioSys Inc. Additionally, if the input data can be provided to SimBioSys, that would be very useful.Please report your problems to us on-line at: "SimBioSys" -> "Support", on that page under the "Technical Support" section you will find the "submit" link to:http://www.simbiosys.ca/support/support-form.htmlTel: +1 416 741 4263Fax: 1 416 741 5084Address:Support StaffSimBioSys Inc.135 Queen's Plate Dr., Unit 520Toronto, ON, M9W 6V1 CANADAWe hope you enjoy working with your CheVi !This document contains proprietary and confidential information of SimBioSys Inc. The content of this document may not be disclosed to third parties, copied or duplicated in any form, in whole or in part, without the prior writtenpermission from SimBioSys Inc.。