反应堆功率控制系统的建模及闭环验证
应用文-AP1000反应堆功率控制系统棒联锁逻辑分析

AP1000反应堆功率控制系统棒联锁逻辑分析'AP1000反应堆功率控制系统棒联锁逻辑分析1 概述反应堆功率控制系统用于维持和调节反应堆堆芯参数在设计要求范围内,以确保反应堆按照电厂功率要求输出热功率。
作为主要过程控制系统之一,反应堆功率控制系统的控制逻辑设计对电厂稳定运行至关重要。
AP1000反应堆功率控制系统包括两个子系统:反应堆冷却剂平均温度(Tavg)控制子系统和反应堆轴向功率偏移(AO)控制子系统(以下简称Tavg控制和AO控制)。
Tavg 控制响应二回路负荷要求,根据一回路工艺过程实测温度值与二回路要求值之间的偏差计算并输出控制,调节反应堆功率控制棒组(M棒组)按一定速率(8步/分至72步/分)在堆芯移动,从而实现维持或调节反应堆冷却剂平均温度在程序设定值的目的,Tavg控制即反应堆输出热功率控制。
AO控制根据堆外核测仪表所测的反应堆上下部功率之差(反应堆功率轴向偏差)与系统设定偏差带之间的偏移量来计算并输出控制,调节反应堆轴向功率偏移控制棒组(AO棒组)按固定速率(8步/分)在堆芯移动,从而维持轴向功率偏差在要求的偏差控制带内。
反应堆稳定运行及瞬态过程中,Tavg控制子系统和AO控制子系统同时独立采集不同的堆芯参数,响应不同的控制要求,逻辑上独立运算,最终输出控制指令至棒控系统不同类型的控制棒组。
在系统功能设计上两者相对独立,但在实际控制执行中,两者存在逻辑接口。
西屋原设计中两个子系统的逻辑接口包括:(1)在控制棒交换过程中,AO控制棒将执行Tavg控制指令,此时仅执行Tavg控制。
(2)在M棒移动过程中,AO棒的移动将被闭锁,直至M棒动作(Tavg调节)结束。
接口1:是AP1000反应堆控本文由联盟收集整理制过程中的周期性操作,本文不做分析。
接口2)即为实现M棒组动作优先于AO棒组动作的棒联锁设计,M棒动作指令将直接作为闭锁AO棒移动的条件之一,本文重点对此联锁设计进行分析。
核反应堆功率控制系统设计与仿真

先进 的控制 系统和 策略也都 应用 到核技 术领域来 , 应 反
堆 控制 系 统也 不断 的被 数 字化 。本 文将 介 绍一 种基 于
TMS 2 L 2 2 改进 P D算法的反应堆功率控 制系 3 0 F 8 和 l I
统, 在借 鉴成 熟核反 应堆设 计方 案基 础上 , 通过相 应 的
反应堆 , 大多数还采用模 拟技术来实现其功率 控制I , 1 少 ]
硬 件 设 计 和 软 件 编程 实 现 全 部 功 率 控 制 系 统 。 经过
MAT AB S MUL NK仿真 , L /I I 完全能满足反应堆安全运
行 的要 求 。
2 系统概 述
核 反 应堆 是 使 原子 核 裂变 的 链 式反 应 能够 有控 制
核 反 应堆 功 率控 制 系 统 主要 用 来实 现 反 应堆 启 动 停堆 、稳定运 行 、功率调 节和事 故情 况下 的安全处 理 , 对保证 核反应 堆安全 和稳 定运行 起着及 其重要 的作 用 , 因此他 是 反应 堆最 重 要 的控 制系 统 。 由于 核反 应 堆 自 身特点和严 格 的安 全要 求 , 使核反 应堆功 率控 制技术远 远落 后于 现 代控 制技 术 。我 国 目前 正在 运 行 的核 电站
摘 要: 目前国内核反 堆控制技术存在数字化和智能化程度不高的问题 , 为提高其安全与操作性 能, 设计 了一种新型数字式反应堆
功率控制系统。系统 采用 T 3 0 F 8 2 MS 2 L 2 l 阵列作为控制器 , 应用改进 P D算法实现三 闭环功率调节 , I 提高了功率控制系统 的 动态特性。给出了该方案系统框图 、硬件框图, 此设 计具有结构紧凑、性 能可靠 、抗干扰性强等优点 。并通过数学建模 , 构造 出系统控制模型 , 再应用 MATL AB仿真。仿真结果表 明系统动态特性 得到改善 , 完全能够满足反应堆安全运行需要。 关键词 : 反应堆 ; 功率控 制系统 ; 数字化 ; 算法 中图分类号 : L 6 . T 323 文献标识码 : 文章编号 :0 3 2 12 0 )0 0 5 0 A 10 7 4 (0 81 0 1- 4
核电厂反应堆功率控制系统及方案分析

核电厂反应堆功率控制系统及方案分析摘要:核能发电厂反应堆功率控制方式较多,通过对HTR-PM、VVER-1000功率控制方案的分析可以发现,HTR-PM控制模式实现起来最为便利,而且具备多种优越的性能,但是控制方法还有不足之处,需要对其进行优化和改善。
关键词:核电站;反应堆功率;控制方式;调试以前,核电站对发电机组进行功率控制多采用A方式,随着核电技术的不断发展进步,法国某家科技公司建议应用G方式。
如今的法国,功率大于1300兆瓦较大的核电机组普遍采用G方式,只有少数的核电机组应用A和G方式进行相互间的结合运行。
AP1000核电技术进行发电机组,其反应堆功率的控制方式应用创新式的水平和分布独立的控制理念,提升了发电机组具备的安全和灵活性能。
世界范围内的首台四代高温度气动制冷的核电站应用250兆瓦的核反应堆来驱动功率为200兆瓦的汽轮机组,和以往采用的压水堆单堆带汽轮机发电机组采取的方式有着很大的差异,核反应堆的功率控制和调节难度会有所提升。
1 HTR-PM核电站反应堆功率控制该种类型的核电站反应堆的功率控制和调节应用大系统递进阶级的控制方式,一般多采用三个层级的递进阶级控制办法,从下层向上层划分为局部控制功能层、协调层、双堆功率配置层。
对核反应进行功率控制主要依赖局部控制层,该功能层向核电控制棒步进电机驱动装置生成转动控制调节信号、脉冲控制动作信号以及转动方向的控制信号。
转动调节控制信号主要用于步进电动机运转以停止运行。
脉冲控制动作信号输入的频率和步进电机的速度有直接的关系,转动方向的控制信号决定着电机的运转方向。
核反应堆功率控制、供水流量控制以及氦气流量控制系统为系统的局部控制层级,主要用于对主供水泵、核控制棒以及主氦风机。
而输出热功率系统、热氦温度控制调节系统、汽轮发动机运行速度、蒸汽温度调节系统归属于调节层级控制系统,控制的对象为汽轮发动机调节级别的压力、核功率、给水流量以气氦气流量。
双反应堆功率分配功能层为相庆的分配控制器械构成,可以根据1、2号功能模块目前所设置的功率大小,以及输出热功率数值,核电站输出电负荷监测值以及设定值,配置的同时给出2 个NSSS功能模块一个新功率设定值。
TMS核功率控制系统的 PID设计与仿真

TMS核功率控制系统的PID设计与仿真钍基熔盐堆(Thorium Molten Salt Reactor , TMSR)核能系统项目是中国科学院先导专项之一,以研发第四代裂变反应堆核能系统为其战略目标。
在固态熔盐实验堆的概念设计方案中,由控制棒、控制棒驱动机构及棒控棒位控制器构成的棒控棒位系统和核功率测量装置构成的功率控制系统(Power Control System, PCS)是熔盐堆控制系统的重要组成部分。
PCS 包括反应堆的核功率控制系统和堆芯热功率控制系统。
由于从堆芯导出的热功率变化值在特定的控制模式下与反应堆的核功率变化一致,所以核功率的控制设计对堆芯导出的热功率变化值至关重要。
反应堆的启动、停堆和功率调节主要通过一定数量的控制棒上下移动来调节反应性而实现。
在TMSR 固态堆上,设计有16 根控制棒,PCS 根据堆物理对堆芯功率分布的控制要求,将16 根控制棒分成若干棒束。
功率控制器根据核功率测量装置的输出信号与设定功率值之间的误差及其变化趋势,根据比例-积分-微分(Proportional Integral Derivative,PID)控制算法,从而给出调节控制棒的运动距离和运动方向等信号,相应的控制棒束在该信号的驱动下以指定的速度运行到指定位置,从而达到调节核功率的目的。
由于反应堆在运行过程中受到的不确定性因素的影响(如在不同运行功率下导致的模型参数的变化等),使得PCS 的控制特性会变差,使用近似线性化得到的系统模型的传统PID 设计的效果在控制精度与鲁棒性方面不太理想。
故在传统PID 设计的基础上,提出改进型PID 多环路设计,用于改善PCS的动态特性和鲁棒性。
本文在已设计完成的控制棒样机的基础上,从控制的角度出发,首先提取控制棒驱动机构(ControlRod Drive Mechanism, CRDM)各单元的数学模型,并对其系统模型进行可控性与可测性分析,然后在MATLAB 环境下进行两种PID 设计仿真并对不同方式PID 参数下的系统静态性能和动态性能进行分析比较,为PCS 控制器提供PID 参数集。
基于SIMULINK的核反应堆功率调节系统建模与仿真

基于SIMULINK的核反应堆功率调节系统建模与仿真作者:张倬董化平孙启航来源:《科技视界》2016年第14期【摘要】在建立核反应堆点堆动力学模型基础上,通过SIMULINK工具搭建反应堆功率调节系统模型,进行反应性扰动试验,对模型的仿真性能进行验证。
仿真模型实现了期望的反应堆功率自动调节的要求和结果。
本文工作为进一步开展反应堆控制系统设计奠定了技术基础。
【关键词】核反应堆功率调节;SIMULINK;建模和仿真;计算机控制0 引言计算机仿真技术应用于核反应堆,最初是从反应堆复杂的科学计算研究开始的。
因为计算机具有运算速度快、精度高、存储容量大等特点以及逻辑运算和判断的能力,随着数字化仪控系统的发展,计算机仿真已越来越广泛地应用于核电厂控制系统研究中。
SIMULINK是MATLAB中用来建模、仿真和分析动态多维系统的交互工具,完全支持图形用户界面,用户只需进行简单的拖拽操作就可以构造出复杂的仿真模型。
因此,利用SIMULINK程序进行核反应堆控制系统仿真研究是十分快捷和高效的手段。
本文在核反应堆点堆动力学模型基础上,结合计算机控制原理,建立反应堆功率调节系统数学模型。
通过MATLAB的SIMULINK工具搭建系统的仿真模型,并进行反应性扰动试验,以验证系统的能够实现反应堆功率自动调节的正确性。
本文的研究对反应堆控制系统设计的工程实现具有较强的指导作用。
1 控制系统原理及组成反应堆功率调节系统计算机控制主要由计算机、被控对象、测量变送和执行机构等组成,其原理框图如图1所示。
电位器将采集到的棒位转化为反应性变化后引入到模拟反应堆的计算机中并引起反应堆功率的变化,反应堆中子通量通过电离室后转化为电信号,这一信号与定值器比较后将产生的偏差信号转化为变频器的频率值以驱动交流电机,电机通过减速器后控制棒位的升降,棒位的变化被电位器所采集并引入反应堆后又将导致功率的变化,形成闭环。
2 系统建模2.1 反应堆性能指标图中的阶跃信号用来输入扰动,从两个示波器的波形图就可以分别看到反应堆内中子通量的变化和控制棒的调节情况。
实验反应堆功率调节系统PID控制器的解析设计方法
第38卷第1期原子能科学技术Vol.38,No.1 2004年1月Atomic Energy Science and TechnologyJan.2004实验反应堆功率调节系统PID 控制器的解析设计方法褚新元,李 富,黄晓津,张良驹(清华大学核能技术设计研究院,北京 100084)摘要:通过对实验反应堆系统模型进行线性化和模型降阶、再对降阶模型进行PID 控制器的理论设计的方法,可使反应堆功率调节系统的设计最优化、客观化和解析化。
将此解析化方法应用于一实验反应堆功率调节系统的设计,通过数值仿真证明:设计的控制器控制效果良好,该解析化设计方法可行。
关键词:PID 控制;模型线性化;模型降价;鲁棒性;实验反应堆中图分类号:TL361 文献标识码:A 文章编号:100026931(2004)0120065205An Analytical Method to Design the PID Controllerfor the Pow er Control System of Experimental Nuclear R eactorCHU Xin 2yuan ,L I Fu ,HUAN G Xiao 2jin ,ZHAN G Liang 2ju(Institute of N uclear Energy Technology ,Tsinghua U niversity ,Beijing 100084,China )Abstract :In order to make the design process for power control system of experimental nu 2clear reactor optimal ,objective and analytical ,an analytical design process which contains the model linearization ,model reduction ,theoretical design of PID controllers is discussed.This method is applied to the design of the power control system of an experi 2mental nuclear reactor ,the numerical simulation results prove that the design process is practical ,and the control performance is satisfactory.K ey w ords :PID control ;model linearization ;model reduction ;robustness ;experimental nuclear reactor收稿日期:2002209211;修回日期:2002212212作者简介:褚新元(1977—),女,甘肃兰州人,硕士研究生,核能科学与工程专业 反应堆功率调节系统的作用是针对反应堆中的各种反应性扰动引起的功率变化自动移动控制棒,使堆功率稳定在设定水平。
反应堆控制系统(RRC)

平均温度控制系统
(反应堆功率调节系统) 反应堆功率调节系统)
参数控制
• 为了保证汽轮发电机组的正常运行,需要 控制的两个关键参数是反应堆的功率和冷 却剂的平均温度。然而由于是A模式,只需 要控制反应堆冷却剂的平均温度。只要保 持冷却剂的温度充分接近它的整定值,则 依靠汽机进汽阀的开度调节就可以保证机 组的输出功率。 • 因此,控制平均温度就能调节反应堆功率。
A控制模式
• 通过平均温度控制系统使棒束型控制棒组 件以自动的方式移动,保持反应堆处于临 界。同时,为了限制功率分布的轴向偏差, 改变硼浓度,以限制调节棒的移动。 • 改变硼浓度是为了补偿燃耗、由氙引起的 反应性变化,在功率变化很大的过程中补 偿功率效应。
A控制模式
• A控制模式的缺点是:由于控制棒组件的插入很 少,当要增加功率时就要稀释,功率提升速度随 燃料循环而有规律地下降,另外,这一运行模式 只能满足±5%Pn/min线性和±10%Pn阶跃的功 率变化。 • A模式的特点是只设置调节棒组A,B,C,D。调节棒 组全部由Ag-In-Cd作吸收体的黑棒组成。通过调 节调节棒组和可溶硼浓度来补偿反应性的变化。 调节棒的提升和下插顺序为重叠方式进行。提升 时以A,B,C,D的顺序提升,重叠步数为95,95,95. 其中D棒组为主调节棒组,插入顺序为D,C,B,A。 重叠步数各为95步。
可变增益单元
非线性增益单元
棒速单元
72 棒速(步/分)
8
-2.8
-1.73 -0.83 -0.560.56Fra bibliotek0.83
1.73
2.8 温差信号(Tavg-Tref)
棒速单元
• 死区
• • • • • • • • • •
为防止棒束频繁动作,棒速单元中设置了棒速死区。如果死区太小,会增加棒的动作, 使机械部分过早磨损。如果死区过大—— 在低负荷时(棒手动控制),如果温差被稳定在死区内,二回路饱和温度及蒸汽压力 都变化,对二回路控制要求较高。同时减小了蒸汽大气排放阀的排放裕度。 在高负荷时,较大的死区减小了运行裕度,会恶化事故后果。 二期棒速死区定为0.83℃(与大亚湾的相同)。 在低负荷时,0.83℃对应的蒸汽发生器的压力变化为(0.83℃×1bar/1℃=)0.83bar, 对应的功率变化为(0.83bar×100%FP/(75-68)bar=)12%FP。
核反应堆功率的H∞-LQR负荷跟踪控制研究

- 18 -高 新 技 术0 引言在电网的实际应用中,核电机组的重要性逐渐凸显,技术人员应根据具体的电网负荷来调整这一类机组的应用方式,由于核反应堆属于较为复杂的非线性体系,因此在正式使用时,如果内部功率出现大范围变动,就会给其负荷跟踪控制带去更大的挑战,为了解决核反应堆内部功率的负荷跟踪控制,需要借助数据模型来开展适宜的追踪控制设计。
1 核反应堆的应用优势与不足1.1 核反应堆的应用优势当前应用的核反应堆具有能量集中性强、储存运输功能佳以及环境污染较轻等优势。
具体来说,在核反应堆的裂变过程中,1 kg 铀提供的能量约为2 300 t 无烟煤提供的能量,在能量高度集中的情况下,其产生的燃料费用较低且带来的综合效益较好。
同时,对核反应堆的使用来说,由于火力发电厂每年消耗的煤炭较多,因此利用核反应堆发电后,无须储存与运输煤炭。
此外,从原子发电的原理上来看,由于其在发电过程中不会释放NOX、SO 2以及CO 等固体颗粒或有毒气体,因此对环境的危害程度较小。
1.2 核反应堆的不足如果想保障核反应堆的应用安全,降低其发生核事故的概率,那么技术人员在正式运行核反应堆时,需要合理控制核反应堆中核燃料的易裂变核素的富集度。
例如原子弹内部核材料总量的90%为易裂变核素铀-235,而核反应堆中的易裂变核素铀-235仅占其总铀装量的2%~4%。
在当前的核反应堆内设有较易吸收中子材料制成的控制棒。
然而,只有合理布置控制棒的相关位置才能控制核反应的速率。
如果想增强核反应堆的控制效果,就需要控制反应堆内部的温度,而冷却剂的使用可及时带出其内部的大量热量。
当冷却剂选择不当时,该核反应堆的运行过程会出现不同程度的风险[1]。
2 搭建核反应堆功率H ∞-LQR 负荷跟踪控制机制为了更好地搭建核反应堆功率H ∞-LQR 负荷跟踪控制模型,技术人员应适时明确这一类模型的主要特征。
具体来看,该核反应堆功率H ∞-LQR 负荷跟踪控制模型在使用过程中具有训练简洁、结构简单等特征,其学习收敛的速度较快,属于非线性函数。
核反应堆数字化仿真验证系统的研发

核反应堆数字化仿真验证系统的研发于洋吴启涛芦韡郭凤晨刘盈于洋工学硕士/工程师/主要研究方向为反应堆系统软件研发与数字化仿真技术研究等/中国核动力研究设计院核反应堆系统设计技术重点实验室(成都610213)吴启涛中国核动力研究设计院核反应堆系统设计技术重点实验室(成都610213)芦韡中国核动力研究设计院核反应堆系统设计技术重点实验室(成都610213)郭凤晨中国核动力研究设计院核反应堆系统设计技术重点实验室(成都610213)刘盈中国核动力研究设计院核反应堆系统设计技术重点实验室(成都610213)摘要本文建立了核反应堆数字化仿真验证系统的总体设计方案,基于RELAP5程序开发了热工水力仿真模型,采用Matlab/Simulink工业组态软件构建了控制系统仿真模型,采用自主开发的ModelTool组态工具开发了仪控操纵与人机交互界面,从而构成了核反应堆数字化仿真验证系统。
降负荷工况仿真测试结果表明,该系统能够实现核反应堆系统瞬态工况的仿真分析,并可用于仪控系统设计方案的验证与优化。
关键词数字化仿真验证系统;仿真模型;核反应堆系统中图分类号:TP2文献标识码:ADOI:10.19694/ki.issn2095-2457.2020.15.025AbstractThe total design scheme of digital simulation validation system fornuclear reactor has been presented.The thermo-hydraulic model was developed based on RELAP5software,and the control system model was constructed by using Matlab/Simulink software.Instrument control andman-machine interface was established with autonomous developed configuration tool ModelTool.The results of simulation test for loadreducing show that the system could perfectly simulate the transientconditions of nuclear reactor system.Key WordsNumerical simulation validation system;Simulation model;Nuclear reactorsystem0引言随着计算机技术的快速发展,计算机仿真越来越多地应用到核反应堆系统设计与验证过程中。
反应堆控制棒驱动机构任务可靠性建模与分析

机械设计与制造工程Machine Design and Manufactu/ne Eneinee/ne 2021年2月第50卷第2期Feb.2021V c V 50 No. 2DOI : 10. 3969/j. ion. 2095 - 509X. 2021.02.008反应堆控制棒驱动机构任务可靠性建模与分析李 维1,邓 强1,鲁文斌S 唐明堂S 吴泽豫2,孙 博2,王自力2,任 羿2(1.中国核动力研究设计院核反应堆系统设计技术重点实验室,四丿11成都610041)(2.北京航空航天大学可靠性与系统工程学院,北京100191)摘要:为了对核电厂压水型核反应堆控制棒驱动机构的可靠性随其升降运行步数变化的规律进行分析及预测,提出一种基于动态Bayes 网络的系统可靠性建模与分析方法。
首先通过建立动态Bayes 网络模型对驱动机构不同功能单元的状态随运行步骤发生循环变化的特‘进行描述,进而 基于所建立的模型对系统整体任务可靠性进行了分析,最后结合案例对提出的方法进行了验证。
结果表明,建立的模型能够为控制棒驱动机构产7的可靠性设计分析工作提供参考。
关键词:控制棒驱动机构;可靠性建模;动态Bayes 网络中图分类号:TL351 文献标识码:A 文章编号:2095 -509X (2021)02 -0035 -05控制棒驱动机构(controt rod dive mechanis 叫 CRDM )是保障反应堆可靠性的关键部件。
压水堆(pressuized water reactor , PWR )通过控制棒驱动 机构带动控制棒组件运动,调整其插入堆芯的高 度,从而对反应水平进行控制[1]。
控制棒驱动机构属于小批量生产的特种装置,其生产成本较高, 工艺结构较为复杂,工况环境较为恶劣[2];同时由于核电站反应堆停堆成本较高,使其具有较高的维 修检测成本[3]o 因此在产品设计阶段通过设计改进的方式使得控制棒驱动机构具有较高的固有可靠性水平,对于保障核电设备安全、高效、经济地运行具有至关重要的作用。
核反应堆控制系统的建模与仿真

核反应堆控制系统的建模与仿真哎呀,说起核反应堆控制系统的建模与仿真,这可真是个相当高深又有趣的话题。
我还记得有一次,我去参加一个科技展览。
在那里,我看到了一个关于核反应堆的模型展示。
当时围了好多人,大家都好奇地张望着。
我使劲儿往前凑,好不容易才看清。
那个模型虽然小,但五脏俱全,各种线路、管道清晰可见。
就在我看得入神的时候,旁边一个小朋友问他爸爸:“这是啥呀?咋这么复杂?”他爸爸笑着说:“这是核反应堆的模型,是个很厉害的东西呢。
”小朋友一脸懵,我在旁边忍不住笑了。
咱先来说说核反应堆控制系统建模这事儿。
这就好比给一个复杂的大机器画一张精确的“设计图”。
你得把核反应堆里的各种元素、部件,还有它们之间的关系,都清清楚楚地描绘出来。
这可不是简单地画画线条,而是要考虑到温度、压力、反应速度等等好多因素。
比如说温度吧,如果温度太高了,那可就危险啦,就像咱们做饭火太大容易糊锅一样。
所以在建模的时候,就得把控制温度的这部分设计得妥妥当当的。
再说说仿真。
这就像是给画好的“设计图”来一场虚拟的“实战演练”。
通过计算机程序,模拟出核反应堆在各种情况下的运行状态。
想象一下,就像是给这个大机器做了一个数字版的“双胞胎”,然后让这个“双胞胎”在各种可能的场景里跑一跑,看看会不会出问题。
如果在仿真中发现了问题,那就能提前调整建模,把潜在的危险消灭在摇篮里。
核反应堆控制系统的建模与仿真,对于保障核反应堆的安全稳定运行,那可是起着至关重要的作用。
就好比咱们出门要先看好地图规划好路线,核反应堆运行之前,也得先有靠谱的建模和仿真来保驾护航。
而且这可不是一蹴而就的事儿,需要不断地试验、改进。
有时候,一个小小的参数调整,都可能带来截然不同的结果。
科研人员们就得像细心的工匠一样,一点点地打磨,一点点地完善。
想象一下,如果没有精确的建模和仿真,那核反应堆运行起来就像没头的苍蝇,到处乱撞,多可怕呀!所以说,这建模与仿真,就是核反应堆的“智慧大脑”和“安全卫士”。
反应堆控制系统的构建与实现

反应堆控制系统的构建与实现随着人类科技的飞速发展,核能作为一种高效、清洁、可持续的能源形式在全球范围内得到了广泛应用。
同时,高效的核反应堆控制系统也成为了核电站的核心设备之一,而反应堆控制系统的构建与实现也成为了一个千锤百炼的过程。
一、反应堆控制系统的基本原理反应堆控制系统是用于实现核反应堆的控制与保护的一种计算机控制系统。
在核反应堆内部,可以通过控制反应堆的燃料组成和摆设等因素来协调反应堆的功率输出和放射性的释放,从而保障核反应堆的正常运转。
控制系统主要由输入和输出两个部分组成,输入主要接受来自传感器的实时监测数据,输出则通过控制执行机构来实现反应堆的动态控制。
二、反应堆控制系统的组成部分1、数据采集和处理系统反应堆控制系统的数据采集和处理系统,主要用于收集、处理和传输反应堆内部各个参数的数据。
通过将各项反应堆参数数据经过数字信号转换器进行转换,然后传输至主控计算机上,实现对反应堆运行的实时监测。
2、主控计算机系统反应堆控制系统的主控计算机系统,是整个控制系统的核心部分。
主控计算机包括硬件系统和软件系统两个方面。
对于硬件方面,主要是通过计算机的处理器、存储器、I/O接口等开展反应堆控制工作;对于软件方面,主要是使用反应堆控制系统专用的控制指令、执行程序以实现反应堆运行的控制和安全保护。
3、执行机构执行机构主要用于对反应堆参数进行调整,以实现对反应堆功率输出的控制和调整。
执行机构包括各种执行阀、变压器等设备,可以通过计算机根据反应堆内部参数进行实时控制和调整。
三、反应堆控制系统的实现方法1、硬件实现反应堆控制系统的硬件实现包括控制计算机、传感器和执行机构等硬件设备。
其中,控制计算机主要用于对反应堆各项数据进行处理和控制,传感器用于对反应堆各项参数进行实时监测,执行机构则用于对反应堆参数进行调整和控制。
2、软件实现反应堆控制系统的软件实现包括各种控制指令和程序的编写。
在编写控制指令和执行程序时,需要考虑反应堆内部各项参数的变化和变化范围,从而对反应堆进行人工控制。
核反应堆系统中以超临界二氧化碳为工质的热力循环过程的建模与分析_梁墩煌

图 2 简 单 布 雷 顿 循 环 流 程 图 Fig.2 Flow chart of simple Brayton cycle
由于 PCHE 中各层板的厚度、流道几何尺寸均相
http:∥jxmu.xmu.edu.cn
· 610 ·
厦 门 大 学 学 报 (自 然 科 学 版 )
2015 年
1~10 对 应 于 图 3 中 的 状 态 点 ,其 中 7~9 重 合 . 图 4 再 压 缩 布 雷 顿 循 环 温 度 与 比 熵 图 Fig.4 Temperature-entropy diagram of recompression Brayton cycle
图6 PCHE 单元结构 Fig.6 Heat exchange unit configurations of PCHE
对于传热单元两个 流 道 之 间,模 型 的 传 热 过 程 分 为热工质与板层之 间 的 对 流 换 热、板 层 之 间 的 热 传 导 以及板层与冷流体 之 间 的 对 流 换 热.对 于 直 线 半 圆 形
Citation:Liang Dunhuang,Zhang Yaoli,Guo Qixun,et al.Modeling and analysis of nuclear reactor system using supercritical- CO2 Brayton cycle[J].Journal of Xiamen University:Natural Science,2015,54(5):608-613.(in Chinese)
应用文-AP1000反应堆功率控制系统棒联锁逻辑分析

AP1000反应堆功率控制系统棒联锁逻辑分析'AP1000反应堆功率控制系统棒联锁逻辑分析1 概述反应堆功率控制系统用于维持和调节反应堆堆芯参数在设计要求范围内,以确保反应堆按照电厂功率要求输出热功率。
作为主要过程控制系统之一,反应堆功率控制系统的控制逻辑设计对电厂稳定运行至关重要。
AP1000反应堆功率控制系统包括两个子系统:反应堆冷却剂平均温度(Tavg)控制子系统和反应堆轴向功率偏移(AO)控制子系统(以下简称Tavg控制和AO控制)。
Tavg控制响应二回路负荷要求,根据一回路工艺过程实测温度值与二回路要求值之间的偏差计算并输出控制,调节反应堆功率控制棒组(M棒组)按一定速率(8步/分至72步/分)在堆芯移动,从而实现维持或调节反应堆冷却剂平均温度在程序设定值的目的,Tavg控制即反应堆输出热功率控制.AO控制根据堆外核测仪表所测的反应堆上下部功率之差(反应堆功率轴向偏差)与系统设定偏差带之间的偏移量来计算并输出控制,调节反应堆轴向功率偏移控制棒组(AO棒组)按固定速率(8步/分)在堆芯移动,从而维持轴向功率偏差在要求的偏差控制带内。
反应堆稳定运行及瞬态过程中,Tavg控制子系统和AO控制子系统同时独立采集不同的堆芯参数,响应不同的控制要求,逻辑上独立运算,最终输出控制指令至棒控系统不同类型的控制棒组。
在系统功能设计上两者相对独立,但在实际控制执行中,两者存在逻辑接口。
西屋原设计中两个子系统的逻辑接口包括:(1)在控制棒交换过程中,AO控制棒将执行Tavg控制指令,此时仅执行Tavg控制。
(2)在M棒移动过程中,AO棒的移动将被闭锁,直至M棒动作(Tavg调节)结束。
接口1:是AP1000反应堆控本文由联盟收集整理制过程中的周期性操作,本文不做分析.接口2)即为实现M棒组动作优先于AO棒组动作的棒联锁设计,M棒动作指令将直接作为闭锁AO棒移动的条件之一,本文重点对此联锁设计进行分析.2 控制要求及棒联锁逻辑分析2.1 反应堆控制要求如前所述,反应堆正常运行过程中,棒控系统将独立接收来自Tavg控制和AO控制输出的M棒和AO棒动作指令,M棒移动(提棒或插棒)将闭锁AO棒移动(提棒或插棒),直至M棒动作指令结束.此控制策略体现了Tavg控制要优先AO控制,在某一瞬态均有Tavg和AO调节需求时,只有先完成Tavg调节后才能进行AO 调节。
核反应堆功率调节系统控制特性研究

图 ?! 功 率 调 节 系 统 闭 环 控 制 方 案 原 理 图 \/5’?!S%2-4%&L4/20/L&3%J0&%I3@&%%LL%H34435C&8-/25I6I-3.
!! 从 图 ? 可 知!功 率 调 节 系 统 闭 环 控 制 原 理 如 下(当 某 种 原 因 使 得 堆 芯 条 件 发 生 变 化 而 引 入 了 一 反 应 性 扰 动 时!此 反 应 性 扰 动 经 过 堆 芯 中 子 动 力 学 过 程 使 得 堆 芯 功 率 发 生 变 化)燃 料 温 度 随 着 功 率 的 变 化 而 发 生 改 变!经 过 堆 芯 的 传热 和 冷 却 水 的 输 运!进 一 步 引 起 慢 化 剂 温 度 和 密 度 变 化)由 燃 料 温 度 和 慢 化 剂 温 度 所 引 起 的 温 度 负 反 应 性 反 馈 反 作 用 于 堆 芯)自 动 控 制 系统根据当前运行的反应堆功率与设定值间的 偏 差!经 过 控 制 器 算 法 输 出 步 进 电 机 控 制 信 号 来 驱 动 控 制 棒 !实 现 抑 制 反 应 堆 的 功 率 扰 动 !保 证反应堆的稳定功率运行%
! ! 研 究 堆 的 功 率 定 值 范 围 宽 !功 率 变 化 频 繁 ! 由 实 验 样 品 引 入 的 反 应 性 扰 动 大 !引 入 速 度 快 ! 对 控 制 特 性 "超 调 量 &振 荡 次 数 &调 节 时 间 &稳 态 精 度 等 #要 求 高 !给 功 率 调 节 系 统 设 计 增 加 了 难
本实验通过经验法进行 E_ 控 制 器 参 数 的 整定"
=! 仿 真 实 验
仿真实验在上述半实物仿真试验系统平台 上 进 行!详 细 研 究 功 率 控 制 系 统 的 闭 环 自 动 调 节特性" =:9! 控 制 器 参 数 对 调 节 特 性 的 影 响 =’9’9! 比 例 的 作 用 ! 在 给 定 功 率 ? <F 下! 微分作用一定!分 别 设 比 例 值 HL 为 !+ 和 !"" 对斜坡扰动和阶跃扰动的响应曲线示于图#和 图!"在 两 图 中!第 ? 个 峰 值 为 斜 坡 响 应!第 ) 个峰值是阶 跃 响 应" 在 图 # 中!斜 坡 扰 动 的 调 节 时 间 为 )’+I!图 ! 中 的 斜 坡 调 节 时 间 为 #I" 这表明!HL 值增大!调节时间变短!但过大 将 导 致超调量增大和振荡次数增多"图#中的阶跃 响 应 曲 线 显 示 !?"I左 右 时 的 振 荡 幅 度 较 大 !系 统的调节时间长"当 HL 减 为 !" 时!系 统 阶 跃 响应的超调量和调节时间则满足要求"
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
核 动 力 工 程Nuclear Power Engineering第30卷 第4 期 2 0 0 9 年8月V ol. 30. No.4 Aug. 2 0 0 9文章编号:0258-0926(2009)04-0096-05反应堆功率控制系统的建模及闭环验证林 桦,林 萌,侯 东,杨燕华(上海交通大学核科学与工程学院,200240)摘要:基于MATLAB/SIMULINK 仿真软件,对岭澳一期核电站功率控制系统进行建模。
通过与RELAP5完成的核电厂主回路热工水力模型相连接,对该控制系统模型进行了闭环瞬态工况测试。
将计算机仿真结果与电厂试验曲线进行了比较,两者非常吻合,定性和定量地验证了本控制模型和热工模型的正确性。
关键词:反应堆;功率控制;闭环验证;RELAP5;MATLAB/SIMULINK 中图分类号:TL362 文献标识码:A1 引 言核电厂高精度、实时、动态仿真要求有准确的反应堆热工水力以及控制系统等模型,它除用于电厂安全分析、操纵员培训等,还可用于控制系统参数优化、实际仪表控制系统验证等方面。
鉴于此,本研究以由RELAP5构建的热工水力模型为基础,利用MATLAB/SIMULINK 软件,以岭澳一期核电站为例,对反应堆功率控制系统进行了建模,并在稳态和瞬态工况下进行了闭环动态仿真验证。
2 控制系统建模及控制对象2.1 功率控制系统的MATLAB/SIMULINK 建模 反应堆功率控制系统的基本原理是根据二回路功率需求控制功率补偿棒的棒位。
其最终目标是使功率补偿棒的位置与功率需求相对应。
压水堆中的控制棒组除了功率补偿棒组外,还设有温度调节棒组。
平均温度控制系统通过测量一回路冷却剂平均温度,与平均温度整定值比较后,经调节器产生调节信号,驱动温度调节棒组,改变反应堆的反应性,从而维持一、二回路功率的匹配,并使实测平均温度与参考平均温度一致。
相对于手工编写代码进行仿真的复杂性和代码质量的不确定性,MATLAB/SIMULINK 提供了模型描述和系统仿真的一种高效途径[1]。
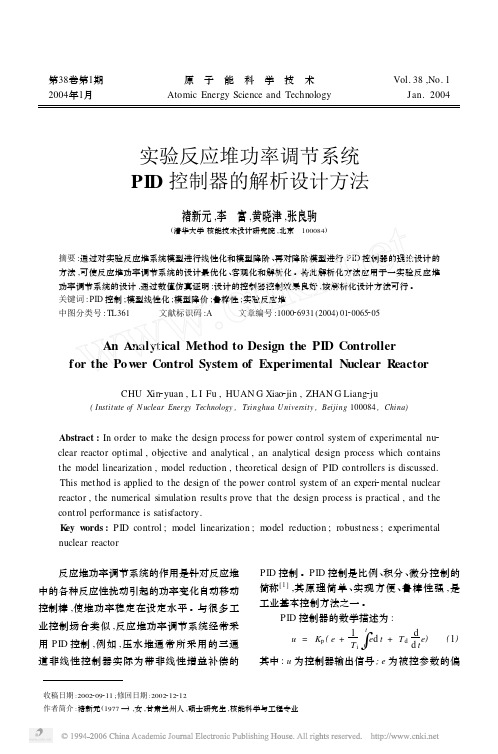
本研究参考岭澳核电站一期的功率调节和平均温度调节系统设计手册[2],使用MATLAB/SIMULINK图1 G 棒组SIMULINK 控制模型Fig. 1 Model of G-Rod Based on SIMULINK收稿日期:2008-06-02;修回日期:2008-09-11林桦等:反应堆功率控制系统的建模及闭环验证 97模拟了反应堆中的温度调节棒组(R棒组)和功率补偿棒组(G棒组)及相应的控制逻辑,通过调节R棒组和G棒组来协调控制反应性,使反应堆具有快速跟踪负荷变化的能力。
G棒组的作用是用于补偿和功率变化相联系的反应性变化。
图1为建立的G棒组SIMULINK 控制模型流程图。
在一定燃耗下,对应于每个功率水平有一个棒位,功率水平与G棒组棒位之间的有效标定曲线如图2所示[3]。
模型根据二回路的功率需求,确定功率调节棒棒位的整定值。
由棒位整定值与当前实际棒位比较后计算出棒束提升或下插信号及棒束移动速度,从而确定新的棒位。
在计算出棒位后,根据棒位与其所引入反应性的关系计算出当前所需引入的反应性作为输出信号,送至RELAP5的点堆中子动力学模型中。
图3为建立的R棒组SIMULINK控制模型流程图,R棒组调节部分的输入信号包括核功率信号、汽轮机负荷信号和反应堆冷却剂平均温度信号。
在反应堆功率运行工况下,当负荷需求与反应堆功率出现不平衡时,将出现温度偏差信号。
图2 G棒组棒位整定值Fig. 2 Setpoint of G-Rod Step Position该偏差信号经棒速程序控制单元后产生R棒组移动速度和方向(提升或插入)信号,而后计算出新时刻棒位。
最后根据棒位与反应性的关系计算出当前所需引入的反应性作为输出信号。
2.2 仿真状态的保存及复位功能对核电厂控制系统中惯性环节及超前滞后环节的模拟,调用SIMULINK系统模块库中的模块可实现动态仿真的要求,但无法保存其仿真状态点,所以无法实现该控制系统仿真状态的复位功能。
系统模块库中惯性环节传递函数为:图3 R棒组SIMULINK控制模型Fig. 3 Model of R-Rod Based on SIMULINK核 动 力 工 程 V ol. 30. No. 4. 2009981)(+⋅=s Ks G τ (1)超前滞后环节传递函数为:11)(+⋅+⋅=s s K s G τ (2)式中,K 为比例系数;τ为时间常数;s 为复变量因子。
本文的控制系统建模过程中,调用SIMULINK 系统模块库中的基本的积分和加法模块,组合成具有状态保存功能的滤波器置于用户自定义模块库中,用于替代SIMULINK 系统模块库中的自带模块。
自定义的滤波器模块封装 后,其参数K 和τ可以根据需要更改,而且支持仿真运行时在线更改。
内部计算逻辑如图4所示,状态参数的引入即仿真开始时对积分器赋初值;状态参数的保存即仿真停止时积分器的计算输出值的保存,再次启动仿真时将保存值作为状态参数输入。
图4 自定义滤波器内部逻辑Fig. 4 Internal Logic of User Defined Filter控制系统运行处于稳态时,一阶惯性环节的输出与输入值相同。
仿真系统在稳态点停止后再次启动时,若使用SIMULINK 系统模块库中的Transfer Fcn 模块,由于其不具备状态保存和复位功能,其输出不再是稳态运行时的结果,会使稳态运行过程发生扰动。
例如,在反应堆冷却剂平均温度调节过程中,温度调节棒组根据二回路的负荷信号,由函数发生器产生一个参考温度值;送入函数发生器的二回路负荷信号经过一阶惯性环节滤波,其传递函数为)1/(1)(+=s s G ;当二回路负荷为100%稳定运行时,停止仿真后再次启动,惯性环节的输出从0开始经过10 s 后才能再次达到稳态值;调用自定义的滤波器模块,其输出值会维持上一次仿真运行停止时的输出值(图5),不会对整个仿真系统引起扰动。
2.3 控制对象与本控制系统模型构成闭环的控制对象,是基于轻水反应堆瞬态最佳估算程序RELAP5建立图5 SIMULINK 系统模块与自定义滤波器模块输出比较Fig.5 Comparison of Output between SIMULINKSystem Model and User Defined Filter Model的岭澳核电站主回路热工模型和点堆中子动力学模型。
其中包括反应堆、稳压器、蒸汽发生器及相应管道等主要设备。
对控制系统模型进行闭环动态实时验证计算时,以RELAP5作为后台计算主程序。
处理控制信号的MATLAB/SIMULINK 程序通过数据库与RELAP5进行热工参数及控制信号的实时交互[4]。
RELAP5输出的主要系统参数包括核功率、一回路平均温度、主蒸汽流量;MATLAB/SIMULINK 输出的主要控制参数有控制棒组动作所引入的反应性、汽轮机流量调节阀开度等。
3 模型验证本文以岭澳一期核电站原始试验报告内容之一的负荷阶跃变化工况为例进行验证。
试验内容为:从97% FP 功率水平阶跃变化至87%FP 功率水平,以测试瞬态工况下相关控制系统维持反应堆正常运行的能力,其阶跃瞬态工况通过改变汽轮机负荷实现[5]。
在对控制系统模型进行验证计算时,首先使反应堆功率维持在97%FP 功率水平的稳定工况,而后通过改变主蒸汽阀门开度,使汽轮机蒸汽负荷阶跃下降10%。
蒸汽流量变化曲线见图6。
由于反应堆功率控制采用G 模式,堆功率跟踪二回路汽轮机负荷变化,反应堆功率变化见图7,堆功率曲线变化趋势与电厂试验数据基本一致。
汽轮机负荷、核功率及一回路平均温度设定值的变化,使得一回路平均温度随之变化。
在降负荷初期,由于堆芯功率无法完全带出,导致一回路平均温度略为上升,其后由于核功率下降及平均温度控制棒组的调节作用,一回路平均温度林 桦等:反应堆功率控制系统的建模及闭环验证 99最终稳定在新的设定值上。
如图8所示,实测平均温度与参考平均温度曲线、计算曲线的变化趋势与电厂试验数据基本一致。
从上述趋势图可见,无论从定性上还是定量上,计算机仿真曲线与电厂的实际试验曲线均吻 合得很好,从而证明了反应堆热工水力模型及控制系统模型的正确性。
4 结 论参考岭澳一期核电厂以M A T L A B / SIMULINK 建立的控制系统模型,与以RELAP5建立的被控对象模型,通过动态耦合构成了一个闭环控制回路,10%阶跃降功率瞬态工况闭环验证结果显示,模型计算数据与电厂原始试验数据吻合,从而证明此种方法可以精确模拟反应堆及其控制系统行为。
这为下一步开展反应堆控制系统参数优化及通过硬接线方式验证实际仪表控制系统组态打下了很好的基础。
参考文献:[1] 杨涤,李立涛,杨旭等.系统实时仿真开发环境与应用[M]. 北京:清华大学出版社,2002.[2] LING AO Nuclear Power Company LTD. System DesignManual [R]. LANPC, 1998. [3]张建民. 核反应堆控制[M]. 西安:西安交通大学出版社,2002.[4] 林萌,胡锐,杨燕华. 核电厂控制与保护系统动态仿真[J]. 核动力工程,2004, 25(6): 562~566.[5] LING AO Nuclear Power Company LTD. Test Report,PL127RRCR60LSUM45GN (TR 1 RRC 60) [R]. LANPC, 2002.Modeling of Reactor Power Control System andClosed Loop VerificationLIN Hua, LIN Meng, HOU Dong, YANG Yan-hua(School of Nuclear Science and Engineering, Shanghai Jiao Tong University, Shanghai, 200240, China )Abstract: The model of nuclear power control system of Ling’ao NPP based on MATLAB/SIMULINK was established. Closed loop test was realized by coupling with the thermal-hydraulic model of primary loop which is based on RELAP5. The comparison of simulated result with test result from NPP shows a good co-ordination, and the correctness of the model was proved qualitatively and quantitatively.Key words: Reactor, Nuclear power control, Closed loop verification, RELAP5, MATLAB/SIMULINK(下转第112页)图6 蒸汽流量变化曲线Fig. 6 Steam Flow Rate Versus Time图7 反应堆功率变化曲线 Fig. 7 Nuclear Power Versus Time图8 冷却剂平均温度变化曲线Fig. 8 Average Temperature of Coolant Versus Time核动力工程 V ol. 30. No. 4. 2009 112Discussion of REA Boric Acid Tank VolumeSHENG Guo-long(China Nuclear Power Technology Research Institute, Shenzhen, Guangdong, 518124, China) Abstract: This paper discussed the design rules of the boric acid tank volume of reactor boron and water makeup system(REA) in PWR nuclear plant and the limit requirements of the tank volume in the operation technical specification. Based on the comparison and analysis of the arguments of Daya Bay nuclear plant 18 months refueling modification and Ling’ao nuclear plant 1/4 refueling modification, the paper pre-assessed and calculated the lack of the REA boric acid tank volume as the fuel enrichment upgraded to 4.95% in the future, and proposed the suggestion of increasing the volume or boric acid concentration of the REA system in new nuclear plant design in order to meet the operation technical specification requirements.Key words: Nuclear power plant, Boric acid tank, V olume, Shutdown作者简介:圣国龙 (1974—),男,反应堆高级操纵员,运行工程师。