波特率连续可调的串口通信技术
基于FPGA的波特率连续可调的UART接口设计

基于FPGA的波特率连续可调的UART接口设计吴志勇;郭元兴;刘雨沁【摘要】在FPGA上设计了一种波特率连续可调的UART接口,该接口符合RS-232C通信协议.将波特率转换为比特持续时间,在固定工作时钟频率下通过改变比特持续时间来实现波特率的连续可调,并将比特持续时间和中断时间间隔作为接口参数,用户可以灵活设置接口速率和中断CPU的频率.在接收端高速采样,采用大数判决的方式确定当前比特值,有效过滤了信号线上的毛刺,提高了UART接口的抗干扰能力.该接口已在实际项目中应用,经验证其工作稳定可靠,数据通信完全正确.%A continuous and adjustable baud-rate UART interface conformable to RS-232C communication protocol is designed on FPGA. Baud rate is converted to bit duration. At constant working clock frequency, the baud rate can be continuously adjusted by changing bit duration, while the bit duration and the interruption interval are used as interface parameters. The rate of interface and the frequency of interrupting the CPU can be set flexibly by users. At the receiver, high-speed sampling is adopted, and the current bit value is determined by the way of majority decision, thus effectively filtering out the burr on the signal line and improving the anti-interference ability of UART interface. The interface is now applied to the actual project. The experiment indicates that this interface is stable and reliable in work and the data communication is completely correct.【期刊名称】《通信技术》【年(卷),期】2018(051)001【总页数】5页(P252-256)【关键词】通用异步收发器;FPGA;波特率可调;大数判决【作者】吴志勇;郭元兴;刘雨沁【作者单位】中国电子科技集团公司第三十研究所,四川成都 610041;中国电子科技集团公司第三十研究所,四川成都 610041;中国电子科技集团公司第三十研究所,四川成都 610041【正文语种】中文【中图分类】TP3360 引言UART(Universal Asynchronous Receiver Transmitter,通用异步收发器)是一种广泛使用的低速串行接口,遵循的协议是RS-232C标准。
串口通信RS232与RS458简介

串口通信RS232和RS485简介PLC与控制设备之间的通信基本上都是基于串行通信接口,采用其对应的通信协议进行控制的,而对于串行通信接口,常用的包括RS232、RS422、RS485。
一、RS232串行通信接口RS-232接口符合美国电子工业联盟(EIA)制定的串行数据通信的接口标准,被广泛用于计算机串行接口外设连接,有些老式PC机上就配置有RS232接口。
RS232的工作方式是单端工作方式,这是一种不平衡的传输方式,收发端信号的逻辑电平都是相对于信号地而言的,RS232最初是DET(数字终端设备)和DCE(数据通信设备)一对一通信,也就是点对点,一般是用于全双工传送,当然也可以用于半双工传送。
此外,RS232是负逻辑,逻辑电平是±5~±15V,传输距离短,只有15米,实际应用可以达到50米,但是再长的距离就须加调制了。
最初RS232标准物理接口是25个引脚的,因为常用的是9个引脚,后来就基本采用DB9连接器了,RS232的DB9连接器的引脚定义见下图:在DB9的9个引脚中,并不是所有的信号端都使用的,比如说RTS/CTS只有在半双工方式中作发送和接收时的切换用,而在全双工方式中,因配置双向通道所以不需要。
一般来说,在全双工方式中RS232标准接线只要三条线就足够了,两根数据信号线TXD/RXD,一根信号地线GND。
双方连接的方式是将TXD和RXD交叉连接,信号地直接相接,然后将各自的RTS/CTS,DSR/DTR短接,将DCD和RI悬空就可以。
二、RS485串行通信接口1、概况为改进RS232通信距离短、速率低的缺点,1983年,RS-485通讯接口被电子工业协会(Electronics Industries Association EIA)批准为一种通讯接口标准。
使用RS-485作为物理层的常用标准协议主要有工业HART总线、modbus协议、Profibus DP等等。
串口通信的基本知识

串口通信的基本知识本文介绍了串口通讯的基本概念、数据格式、通讯方式、典型的串口通讯标准等内容。
串口通讯,RS232,RS485,停止位,奇校验,偶校验1 串口通讯串口通讯(Serial Communication),是指外设和计算机间,通过数据信号线、地线等,按位进行传输数据的一种通讯方式。
串口是一种接口标准,它规定了接口的电气标准,没有规定接口插件电缆以及使用的协议。
2 串口通讯的数据格式一个字符一个字符地传输,每个字符一位一位地传输,并且传输一个字符时,总是以“起始位”开始,以“停止位”结束,字符之间没有固定的时间间隔要求。
每一个字符的前面都有一位起始位(低电平),字符本身由7位数据位组成,接着字符后面是一位校验位(检验位可以是奇校验、偶校验或无校验位),最后是一位或一位半或二位停止位,停止位后面是不定长的空闲位,停止位和空闲位都规定为高电平。
实际传输时每一位的信号宽度与波特率有关,波特率越高,宽度越小,在进行传输之前,双方一定要使用同一个波特率设置。
3 通讯方式单工模式(Simplex Communication)的数据传输是单向的。
通信双方中,一方固定为发送端,一方则固定为接收端。
信息只能沿一个方向传输,使用一根传输线。
半双工模式(Half Duplex)通信使用同一根传输线,既可以发送数据又可以接收数据,但不能同时进行发送和接收。
数据传输允许数据在两个方向上传输,但是,在任何时刻只能由其中的一方发送数据,另一方接收数据。
因此半双工模式既可以使用一条数据线,也可以使用两条数据线。
半双工通信中每端需有一个收发切换电子开关,通过切换来决定数据向哪个方向传输。
因为有切换,所以会产生时间延迟,信息传输效率低些。
全双工模式(Full Duplex)通信允许数据同时在两个方向上传输。
因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。
在全双工模式中,每一端都有发送器和接收器,有两条传输线,信息传输效率高。
51单片机串口通信

一、串口通信原理串口通讯对单片机而言意义重大,不但可以实现将单片机的数据传输到计算机端,而且也能实现计算机对单片机的控制。
由于其所需电缆线少,接线简单,所以在较远距离传输中,得到了广泛的运用。
串口通信的工作原理请同学们参看教科书。
以下对串口通信中一些需要同学们注意的地方作一点说明:1、波特率选择波特率(Boud Rate)就是在串口通信中每秒能够发送的位数(bits/second)。
MSC-51串行端口在四种工作模式下有不同的波特率计算方法。
其中,模式0和模式2波特率计算很简单,请同学们参看教科书;模式1和模式3的波特率选择相同,故在此仅以工作模式1为例来说明串口通信波特率的选择。
在串行端口工作于模式1,其波特率将由计时/计数器1来产生,通常设置定时器工作于模式2(自动再加模式)。
在此模式下波特率计算公式为:波特率=(1+SMOD)*晶振频率/(384*(256-TH1))其中,SMOD——寄存器PCON的第7位,称为波特率倍增位;TH1——定时器的重载值。
在选择波特率的时候需要考虑两点:首先,系统需要的通信速率。
这要根据系统的运作特点,确定通信的频率范围。
然后考虑通信时钟误差。
使用同一晶振频率在选择不同的通信速率时通信时钟误差会有很大差别。
为了通信的稳定,我们应该尽量选择时钟误差最小的频率进行通信。
下面举例说明波特率选择过程:假设系统要求的通信频率在20000bit/s以下,晶振频率为12MHz,设置SMOD=1(即波特率倍增)。
则TH1=256-62500/波特率根据波特率取值表,我们知道可以选取的波特率有:1200,2400,4800,9600,19200。
列计数器重载值,通信误差如下表:因此,在通信中,最好选用波特率为1200,2400,4800中的一个。
2、通信协议的使用通信协议是通信设备在通信前的约定。
单片机、计算机有了协议这种约定,通信双方才能明白对方的意图,以进行下一步动作。
假定我们需要在PC机与单片机之间进行通信,在双方程式设计过程中,有如下约定:0xA1:单片机读取P0端口数据,并将读取数据返回PC机;0xA2:单片机从PC机接收一段控制数据;0xA3:单片机操作成功信息。
串口波特率 的单位
串口波特率的单位
串口波特率的单位通常是波特,符号为波特/秒或者bps。
波特率是指每秒传输的比特数,它表示了在一个串行通信信道上每秒钟传输的数据位数。
波特率的单位"波特"是为了纪念发明电报和电传真技术的法国工程师巴蒂斯特·巴波特而命名的。
在计算机和通信领域,波特率是衡量数据传输速率的重要指标,它决定了数据在串行通信信道上的传输速度。
常见的串口波特率包括9600波特、19200波特、38400波特、115200波特等,它们分别代表每秒传输9600、19200、38400、115200位的数据。
因此,波特率是衡量串行通信速度的重要参数,它直接影响到数据传输的效率和稳定性。
串口通信原理

串口通信原理串口通信是一种用于在计算机或其他设备之间传输数据的通信方式。
它是一种通过串行线路进行数据传输的通信方式,相比并行通信,串口通信可以节省大量的线路资源,因此在很多场合下被广泛应用。
本文将介绍串口通信的原理及其在实际应用中的一些特点。
首先,串口通信的原理是通过串行线路将数据一位一位地传输。
在串口通信中,数据是按照一定的速率通过串行线路进行传输的,这个速率被称为波特率。
波特率越高,数据传输的速度也就越快。
在进行串口通信时,发送端和接收端的波特率必须是一致的,否则会导致数据传输错误。
其次,串口通信中的数据是通过数据位、停止位和校验位来进行传输的。
数据位指的是每个数据字节中实际用于传输数据的位数,通常为8位。
停止位是用来标识一个数据帧的结束的位,通常为1位。
校验位是用来验证数据传输是否正确的位,通常有奇校验、偶校验和无校验三种方式。
通过这些位的组合,可以确保数据在传输过程中不会出现错误。
另外,串口通信还有两种常见的接口标准,分别是RS-232和RS-485。
RS-232是一种较为常见的串口通信接口标准,它通常用于在个人电脑和外部设备之间进行数据传输。
RS-485是一种用于工业控制系统中的串口通信接口标准,它可以支持多个设备之间的数据传输,并且具有较高的抗干扰能力。
在实际应用中,串口通信常常被用于各种设备之间的数据传输,比如计算机与打印机、计算机与传感器等。
通过串口通信,这些设备可以方便地进行数据交换,实现各种功能。
另外,串口通信也被广泛应用于各种嵌入式系统中,比如工业控制系统、智能家居系统等。
总的来说,串口通信是一种简单而有效的数据传输方式,它通过串行线路进行数据传输,可以节省大量的线路资源,因此在各种设备之间的数据传输中得到了广泛的应用。
希望本文对串口通信的原理及其在实际应用中的特点有所帮助。
串口波特率自动

串口波特率自动
串口波特率自动是一个重要的技术领域,对于各种设备之间的通信起着至关重要的作用。
串口波特率是指串行通信中单位时间内传输的比特数,它决定了通信速率的快慢。
在现代科技发展的今天,串口波特率自动调节的需求越来越大。
随着设备的智能化和自动化程度的提高,不同设备之间的通信变得更加复杂和多样化。
传统的人工设置串口波特率已经无法满足这种需求,因此自动调节的技术应运而生。
自动调节串口波特率的方法有很多种,其中一种常见的方法是通过设备之间的握手协议来实现。
设备在通信之前先进行协商,确定双方支持的最高波特率,然后根据设备的处理能力和其他条件来确定实际的波特率。
这种方法可以确保通信的稳定性和可靠性,同时也提高了通信的效率。
另一种自动调节串口波特率的方法是通过设备的自适应能力来实现。
设备可以根据传输数据的大小和复杂度来动态调节波特率,以满足不同情况下的通信需求。
这种方法可以使通信更加灵活和高效,提高了设备之间的数据传输速度和质量。
串口波特率自动调节的技术不仅可以应用于各种智能设备之间的通信,还可以应用于工业控制系统、通信网络、电子设备等领域。
它可以提高设备之间的互联互通能力,减少人工干预的成本和工作量,
提高工作效率和生产效益。
串口波特率自动调节是一个非常有价值和前景的技术领域。
它可以为各种设备之间的通信带来便利和效益,推动科技进步和社会发展。
我们有理由相信,在不久的将来,串口波特率自动调节技术将会得到更广泛的应用和推广。
RS485串口通信原理

RS485串口通信原理RS-485是一种常用的串行通信协议,用于实现在多个设备之间进行数据通信。
它以可靠性高、传输速度快和适应性强的特点而被广泛应用于工业控制和自动化领域。
RS-485采用差分信号传输方式,即通过两根电缆将数据信号传输到接收端。
其中一根电缆定义为A线,另一根定义为B线。
数据信号的传输方式是以高电平和低电平的差值来表示,这样的传输方式可以减少受到环境干扰的影响。
在RS-485通信中,常常有一个主设备和多个从设备。
主设备负责发送指令或数据,从设备负责接收数据或返回应答。
通常,主设备会发送一个数据帧给从设备,数据帧由起始位、数据位、校验位和停止位组成。
从设备接收到数据帧后,会进行校验,确保数据的完整性和准确性。
在RS-485通信中,主设备和从设备之间的通信是通过发送和接收数据帧来进行的。
主设备通过A线发送数据,从设备通过B线接收数据。
同时,主设备通过B线发送数据,从设备通过A线接收数据。
这种全双工的通信方式使得主设备和从设备可以同时发送和接收数据,提高了通信效率。
RS-485通信协议还具有多主设备和多从设备的特点。
这意味着在一个RS-485总线上可以连接多台主设备和从设备。
对于多主设备的情况,通信是通过总线控制器进行的,总线控制器负责协调每个主设备发送数据的时间。
对于多从设备的情况,每个从设备都有一个唯一的地址,主设备通过地址来选择指定的从设备进行通信。
在RS-485通信中,还有一个重要的概念是终端电阻。
终端电阻是连接在A线和B线的两端,用来消除信号的反射和抑制干扰。
通常,在RS-485总线的两端都需要设置终端电阻,以确保信号的传输质量。
总之,RS-485是一种可靠且高效的串行通信协议,通过差分信号传输方式实现多设备间的数据通信。
它具有适应性强、传输速度快和抗干扰能力强的优点,被广泛应用于工业控制和自动化领域。
通过了解RS-485通信原理,可以更好地理解和应用这一通信协议。
串口电路原理
串口电路,即串行通信接口电路,是一种用于数据传输的电子电路设计,通常指的是RS-232、RS-422、RS-485等标准的串行通信接口。
这些接口主要用于计算机、嵌入式系统以及其他电子设备之间的数据交换。
基本原理:
1. 信号格式:
串行通信是指数据一位接一位地按照时间顺序进行传输,而不是像并行通信那样同时发送多位数据。
在串口电路中,数据通常包括起始位、数据位(一般为5至9位)、奇偶校验位(可选)、停止位(1或2位)。
2. 电平转换:
RS-232标准规定了TTL电平到RS-232电平的转换要求。
TTL电平是逻辑器件常用的0V和+5V(或者3.3V),而RS-232电平则采用了负电压表示逻辑“1”,正电压表示逻辑“0”的非对称方式,例如-12V代表逻辑"1",+12V代表逻辑"0"。
3. 通信协议:
串口电路还包括握手信号线(如RTS/CTS、DTR/DSR等)以实现设备间的控制和同步。
通过设置合适的波特率(每秒
传输的位数)、数据格式以及握手协议,确保数据正确无误地在两台或多台设备间进行收发。
4. 电气特性:
串口电路需要满足特定的电气规范,如最大数据传输速率、信号的最大电压摆幅、最小接收器输入阈值等。
在实际应用中,串口电路通常由一个UART(通用异步收发传输器)控制器芯片和必要的电平转换电路组成,能够将CPU处理的数据转化为适合电缆传输的电信号,并且可以接收来自电缆的信号并转换回CPU可以理解的数字信号。
100kbps速率的串口通信接收设计

100kbps速率的串口通信接收设计摘要:1.串口通信概述2.100kbps 速率串口通信的特点3.接收设计原理4.接收设计实现5.接收设计验证6.总结正文:一、串口通信概述串口通信(Serial Communication)是一种通信方式,其特点是仅用一对传输线完成数据传输。
与并行通信相比,串口通信在仅用两根线的情况下完成数据传输,大大降低了成本。
经典的串口通信包括三根线,分别是地线、发送线(TX)和接收线(RX)。
由于串口通信是异步的,发送端和接收端遵循同一格式接收和发送数据(如起始位、停止位等),且发送端和接收端需要设置成同一波特率。
二、100kbps 速率串口通信的特点100kbps 速率的串口通信是指通信双方在串口通信过程中,以100kbps 的速率进行数据传输。
在100kbps 速率下,每秒传输100,000 比特(bit)数据。
相较于其他速率的串口通信,100kbps 速率具有较高的传输速度,能够满足大部分通信需求。
同时,由于通信速率较高,可以减少通信时间,提高通信效率。
三、接收设计原理在100kbps 速率串口通信接收设计中,主要涉及以下几个方面:1.接收电路设计:接收电路需要能够处理100kbps 的通信速率,并将收到的数据进行解调、放大、滤波等处理,以便后续模块使用。
2.波特率检测与同步:接收端需要对接收到的数据进行波特率检测,以确保接收到的数据符合预设的波特率。
在检测到波特率后,接收端还需与发送端同步,确保数据传输的稳定性。
3.数据解码与处理:接收端需要对接收到的数据进行解码,根据预设的编码方式将数据转换为原始信息。
同时,接收端还需对解码后的数据进行处理,如存储、分析、显示等。
四、接收设计实现在实际实现100kbps 速率串口通信接收设计时,可以采用以下方案:1.选择合适的接收电路,如RS-232、RS-485 等,以处理100kbps 的通信速率。
2.使用波特率发生器产生与发送端相同的波特率,以便进行同步。
stm32 串口通信数据发送和波特率生成原理

stm32 串口通信数据发送和波特率生成原理【stm32 串口通信数据发送和波特率生成原理】一、介绍在嵌入式系统中,串口通信是非常常见的一种数据传输方式。
而作为嵌入式系统中常用的芯片,STM32系列微控制器因其性能强悍、资源丰富而备受开发者喜爱。
在STM32微控制器中,串口通信的数据发送和波特率生成原理是非常重要的内容,本文将围绕这一主题展开全面的探讨。
二、数据发送原理1. 数据发送的基本原理数据发送是指将芯片内部的数据通过串口发送到外部设备,例如PC机或者其他外部设备。
在STM32中,数据发送的基本原理是通过USART外设来实现,可以采用DMA或者中断方式发送数据。
在数据发送过程中,首先需要配置USART外设的相关参数,例如波特率、数据位、停止位和奇偶校验位等。
将待发送的数据写入USART的数据寄存器中,USART外设会将数据自动发送出去。
2. 数据发送的实现步骤a. 配置USART外设的参数,包括波特率、数据位、停止位和奇偶校验位等。
b. 将待发送的数据写入USART的数据寄存器中,等待数据发送完成。
三、波特率生成原理1. 波特率的概念和重要性波特率是指每秒传输的比特数,是衡量串口通信速度的重要参数。
在串口通信中,发送端和接收端必须设置相同的波特率,才能正确地接收和解析数据。
2. 波特率的生成原理在STM32中,波特率的生成原理是通过计算波特率发生器的预分频和分频系数来实现的。
通过计算得到波特率发生器的预分频和分频系数,然后配置USART外设的波特率发生器,最终生成所需的波特率。
四、个人观点和理解从上面对数据发送和波特率生成原理的介绍可以看出,STM32的串口通信功能非常灵活和强大,可以通过简单的配置和操作实现数据的可靠传输。
对波特率的生成原理的理解对于正确、稳定地进行串口通信至关重要,开发者在进行串口通信时需要深入理解并合理配置波特率。
在实际开发中,要注意串口通信时的波特率配置是否一致,数据位、停止位和奇偶校验位的配置是否正确,以及数据发送和接收的正确性等问题,以确保串口通信的稳定性和可靠性。
ttl串口不同波特率通信距离
ttl串口不同波特率通信距离TTL串口是一种常见的通信接口,它广泛应用于各种电子设备之间的串口通信。
而不同波特率的TTL串口通信距离受到多种因素的影响,本文将对这些因素进行详细解析。
首先,我们来了解一下什么是TTL串口。
TTL是一种数字电平标准,它代表的是“晶体管-晶体管逻辑电路”,是指利用晶体管构成的逻辑电路。
而串口通信是指通过串行传输方式,将数据一位一位地传送出去。
TTL串口通信是指利用TTL电平标准进行串行数据传输。
在TTL串口通信中,波特率是一个重要的参数。
波特率指的是每秒传输的数据位数,通常以“波特”表示,可以简单理解为传输速度。
波特率越高,传输速度越快,但在通信距离方面也会受到影响。
首先,通信电缆的质量是影响TTL串口通信距离的重要因素之一。
通信电缆质量好,传输信号的噪音较小,通信距离可以更远。
相反,如果通信电缆质量较差,信号容易受到干扰,通信距离会受到限制。
其次,串口设备的驱动能力也会影响通信距离。
驱动能力指的是串口设备从发送端推动信号到接收端所能达到的最大距离。
驱动能力越强,通信距离就越远。
此外,通信环境的电磁干扰程度也会对TTL串口通信距离产生影响。
电磁干扰会导致信号质量下降,从而限制通信距离。
最后,还需要考虑串口设备的工作电压。
工作电压直接影响TTL串口通信的可靠性和稳定性。
一般来说,工作电压稳定的串口设备通信距离较远,相反,电压波动较大的串口设备通信距离会受到限制。
综上所述,TTL串口不同波特率通信距离受到多种因素的影响。
为了确保稳定的通信距离,我们需要选择优质的通信电缆、具有良好驱动能力的串口设备,并尽量避免电磁干扰。
此外,合理选择工作电压也能够提升TTL串口通信的稳定性和可靠性。
只有综合考虑这些因素,我们才能更好地应用TTL串口通信技术。
将一种波特率转换成另一种波特率的方法
一种波特率转换成另一种波特率的方法随着通信技术的发展,波特率转换已经成为了通信领域中的一个重要问题。
波特率是指单位时间内传输的比特数,通常用每秒传输的比特数来表示。
在实际应用中,由于设备之间的通信要求不同,会出现波特率不匹配的情况,因此需要进行波特率转换。
下面将介绍一种将一种波特率转换成另一种波特率的方法。
1. 串口波特率转换器在串口通信中,波特率转换是常见的需求。
为了实现串口波特率的转换,可以使用专门的串口波特率转换器。
这种转换器通常包括一个高速串口和一个低速串口,通过内部的转换芯片可以实现从一个波特率到另一个波特率的转换。
用户只需将需要转换的串口连接到对应的转换器端口上,便可实现波特率的转换。
2. 软件算法转换除了硬件设备外,还可以通过软件算法来实现波特率的转换。
这种方法适用于一些需要动态调整波特率的场景,可以通过编写软件程序来实现波特率的转换。
通过对输入数据进行预处理和处理,可以实现从一个波特率到另一个波特率的转换。
这种方法需要充分考虑数据的完整性和准确性,对算法的设计和实现往往需要较高的技术水平。
3. 中间设备转发在一些特殊的场景中,可以通过中间设备来实现波特率的转换。
这种方法适用于需要在不同波特率设备之间传输数据的情况,可以通过中间设备来实现波特率的转换和数据的转发。
这种方法需要考虑中间设备的性能和稳定性,以及数据的完整性和准确性。
波特率转换是通信领域中的一个重要问题,我们可以通过串口波特率转换器、软件算法转换和中间设备转发等方法来实现波特率的转换。
不同的方法适用于不同的场景,需要根据实际需求选择合适的方法来进行波特率转换。
随着通信技术的不断发展,波特率转换技术也将不断更新和完善,为通信领域的发展提供更多的可能性。
波特率转换技术在通信领域的重要性不言而喻。
以往,波特率不匹配可能导致通信设备无法正常工作,甚至导致数据丢失或传输错误。
为了确保设备间的顺畅通信,波特率转换技术至关重要。
继续深入探讨波特率转换技术,将有助于我们更好地理解其原理和应用。
rk3568串口自动识别波特率的原理
rk3568串口自动识别波特率的原理全文共四篇示例,供读者参考第一篇示例:RK3568是一种集成式多媒体处理器,广泛应用于智能控制、嵌入式系统等领域。
串口通信是常见的外设设备之一,而串口波特率的设置是串口通信中非常重要的一个参数。
RK3568的串口自动识别波特率功能可以帮助开发者更加方便地进行串口通信设置,提高开发效率。
本文将介绍RK3568串口自动识别波特率的原理及工作流程。
RK3568的串口自动识别波特率功能主要通过硬件设计和固件编程实现。
在硬件设计方面,RK3568内部集成了UART(Universal Asynchronous Receiver/Transmitter)模块,该模块可以满足串口通信的基本功能。
而在固件方面,RK3568的操作系统支持串口波特率的自动识别功能,可以在开发者不设置波特率的情况下,根据接收到的数据自动识别波特率并进行通信。
RK3568串口自动识别波特率的原理主要包括以下几个步骤:1. 接收数据:RK3568的UART模块通过串口接收数据,并在接收缓冲区中存储接收到的数据。
2. 检测波特率:RK3568的固件会对接收到的数据进行波特率检测,即通过检测数据之间的时间间隔来判断当前串口通信的波特率。
4. 通信设置:识别到串口通信的波特率后,RK3568的固件会根据此波特率设置串口通信的参数,并开始正常的数据传输过程。
通过上述步骤,RK3568的串口自动识别波特率功能可以实现在不设置波特率的情况下,自动识别当前的波特率并进行通信。
这一功能大大简化了开发者的工作,减少了设置参数的复杂性,提高了开发效率。
RK3568串口自动识别波特率功能是一项非常实用的功能,有效地简化了串口通信的操作,提高了开发效率和通信的可靠性。
在未来的智能控制和嵌入式系统中,该功能将会发挥越来越大的作用,推动着智能技术更加普及和发展。
第二篇示例:RK3568是瑞芯微推出的一款高性能处理器,广泛应用于智能家居、工业控制、医疗设备等领域。
STC单片机波特率自适应方法
STC单片机波特率自适应方法串口RS 232是工业控制、仪器仪表、计算机外设常用的一种通信协议。
串口通信的波特率一般都是选取标准系列值,并要求通信双方严格遵循相同的波特率,实际应用中,一台设备往往要与多种其他设备联络,为适应各种不同设备的通信速度,就要求该设备能适应不同的波特率,实现这种要求的常见方法有两种,一是增加波特率选择开关,二是设计能自动适应各种常见通信速度的串口。
第一种方法增加了硬件,同时针对不同对象需要重新设置开关,在不清楚对方波特率的情况下还无法使用。
第二种方法采用软硬件结合,通过检测、计算,自动选择正确的波特率,实际使用极其方便。
自适应波特率串口的实现方法通常有以下几种:(1)协议约定通信开始时主机固定发送1个字符,从机以不同的波特率试探接收,当接收到的数据与约定相同时,确定该波特率即是正确的通信波特率。
(2)协议约定通信开始时主机发送1串字符,从机以某固定波特率接收,然后通过软件分析接收到的数据,计算出接收数据与发送数据之间的倍数关系,从而确定正确的波特率。
(3)协议约定通信开始时主机固定发送1个字符,从机用单片机定时器检测RXD上的信号宽度,通过计算来确定主机的波特率。
以上3种方法,第一种由于需要多次试探,效率很低;第二种计算量过大,不适合单片机处理;第三种方式单片机有现成的定时器资源,计算也相对简单,所以优选这种。
要测量脉冲宽度,前提是单片机的时钟信号必须稳定。
目前很多STC单片机可选外接晶振时钟或片内RC振荡时钟,片内RC振荡时钟省去了外部的晶振等元件,成本降低、电路板的体积也可以缩小,这对成本及体积敏感的应用很具优势。
但选用片内RC振荡时,频率会有±15%左右的误差,频率的稳定性也比外接晶振要差,按理论计算值设置波特率参数,无法保证可靠的通信,但按以上自适应波特率串口的第三种方法,每次通信前实测、计算、确定波特率常数,就可以实现稳定可靠的通信,这样充分利用了STC单片机的优势。
波特率连续可调的串口通信技术
Ree rho h eil o sac nteS r mmu iainT cn lg rteCo t u ul dutbeB n t aC nct eh oo yf n n o s A js l a dRae o o h i y a
C A0 an n. L U F n S ia I a g
( oeeo EetncadIf m t nE g er g N nn n e i e nui dAt nu c,N n n 106 h a C lg f l r i n o ao ni e n , aj gU i rt o A r at s n soats aj g 0 1 ,Ci ) l co nr i ni i v syf o ca r i i 2 n
fe i l n d sg n a e 8 p id wi ey. lxb e i e in a d c n b p l d l e
K y o d P I ne ae e a cm u i tn ot uul ajs dbn t;D S P A ew r s C t c ;sr l o m nc i ;cni os d t adr e D ;F G i r f i ao n y ue a
a 竹技 21 第4 第 2 0 年 2卷 1 1 期
E e t n c S i & T c . e . 5.2 1 lcr i c. o e h /D c 1 0 1
波 特 率 连 续 可 调 的 串 口通 信 技 术
曹赛 男 ,刘 方
( 南京航 空航天大学 电子信息工程学 院 ,江苏 南京
基于PI C 总线 ¨ 的串 口通信技术 , 在工业领域 中 有 着重 要 的应用 。而 目前 市场上 基 于 P I 线 的 串 口 C总 通信卡 , 虽然可 以实现多串口收发且波特率可调 , 但可 调 的波 特率 只是 几 个 点 , 能 实 现 连 续 可调 。但 在 一 不 些军事通信 中, 经常会需要波特率连续可调 , 以满足军 事通信 中对波特率 的特殊要求 。文 中基 于这个要求 , 采用硬件描述语言 , 实现这一功 能要求在 F G P A上 的 研究、 开发 、 测试 与 验证 。
NXP ARM UART串口自动波特率的实现
NXP ARM UART串口自动波特率的实现随着应用的需要,自动波特率已经不是什么新奇的概念了。
在以前要实现自动波特率,一般都会用个定时器来计算数据长度,从而获取波特率。
在NXP芯片的串口中直接添加了一个定时器,自动实现波特率的计算,只需要正确设置好寄存器就可以了,非常简单实用,下面我们就讲讲实现的方式以及注意事项。
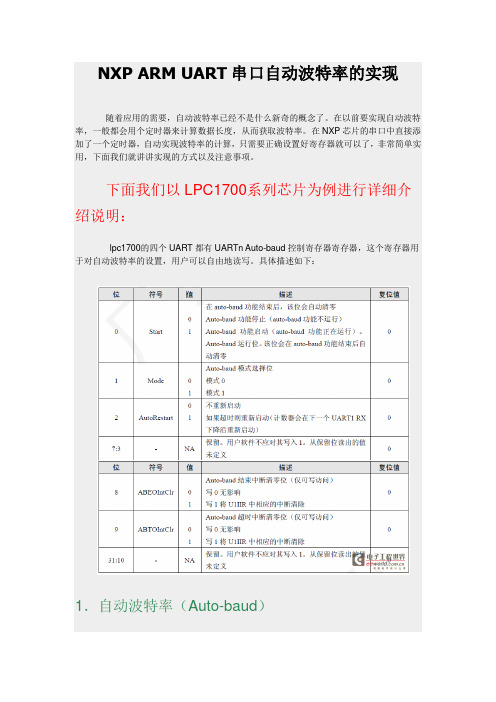
下面我们以LPC1700系列芯片为例进行详细介绍说明:lpc1700的四个UART都有UARTn Auto-baud控制寄存器寄存器,这个寄存器用于对自动波特率的设置,用户可以自由地读写。
具体描述如下:1.自动波特率(Auto-baud)UARTn auto-baud功能可用于测量基于“AT”协议(Hayes命令)的输入波特率。
如果auto-baud功能被使能,那么auto-baud功能部件将测量接收数据流中的1位所消耗的时间,并根据这个结果来设置除数锁存寄存器UnDLM和UnDLL。
Auto-baud功能是通过置位UnACR起始位来启动的,并通过清零UnACR起始位来停止。
Auto-baud一旦结束,起始位就将自动清零,并且对该起始位进行读取将会返回auto-baud的状态(挂起/完成)。
可通过设置UnACR模式位来使用两种auto-baud测量模式。
在模式0下,波特率是通过对UARTn RX管脚上两个连续的下降沿进行测量(起始位的下降沿和第一位的下降沿)来得到的。
而在模式1下,波特率则是通过测量UARTn RX管脚上的下降沿和后续的上升沿之间的时间(起始位的长度)来得到的。
如果出现超时(速率测量计数器溢出),UnACR AutoRestart位可用于自动重启波特率测量。
如果该位被置位,速率测量将会在UARTn RX管脚的下一个下降沿重新启动。
Auto-baud功能会产生两种中断:UnIIR ABTOInt中断(UnIER ABToIntEn置位且自动波特率测量寄存器溢出);UnIIR ABEOInt中断(UnIER ABEOIntEn置位且auto-baud已经成功完成)。
不同类型PLC的串口通讯
不同类型PLC的串口通讯串口通讯在越来越多的智能仪表,PLC,触摸屏,工控软件(组态王、WINCC),编程软件等等和串口通讯有着直接的关系,因此比较深入的了解串口通讯,有助于我们对这些设备和软件的通讯协议的通讯波特率,起始位,数据位,奇偶校验,停止位的设置。
关于计算机的通讯技术,是我们仪表比较前卫又比较较难懂的知识。
他更是我们了解平常接触的RJ-45 TCP/IP 通讯的基础。
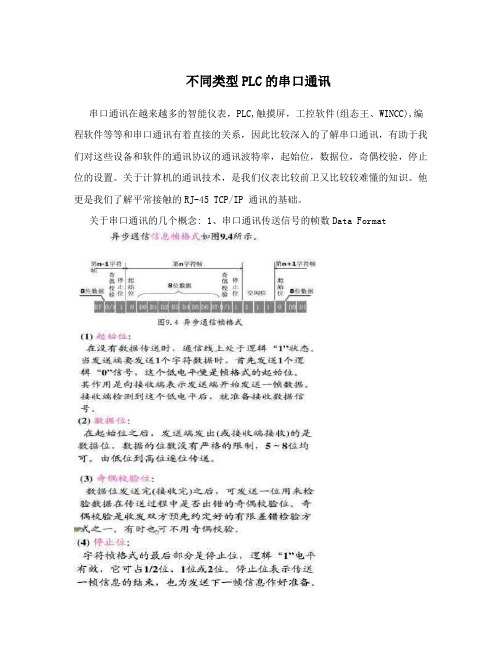
关于串口通讯的几个概念: 1、串口通讯传送信号的帧数Data Format串口通讯传送一个字符(一帧数据)包括:一个起始位;7位或8位数据位(大多数设备通讯数据位7、8位居多);一个奇/偶校验位;停止位(1位或1位半或2位)。
2、电脑串口接线串口的实物和固定通用的引脚定义DB25芯接头定义 DB9芯接头定义PC串行接口串口定义(db9)PC/AT 机上的串行口是 9 针公插座,引脚定义为:1 CD <-- Carrier Detect 载波检测2 RXD <-- Receive Data 接收数据3 TXD --> Transmit Data 发送数据4 DTR --> Data Terminal Ready 数据终端准备好5 GND –– System Ground 信号地6 DSR <-- Data Set Ready 数据准备好7 RTS --> Request to Send 请求发送8 CTS <-- Clear to Send 允许发送9 RI <-- Ring Indicator 振铃提示其中2、3、5脚在设备和PLC通讯中经常用到,时常用的接法,必须记住。
在焊接过程中一定要看好排列的次序,分清端脚,现在的DB9芯头分公母头,计算机上一般为母口,配套的接头为头,公母头上都打有端子号,一定要看清焊接。
PLC的公母头有的不一样,一定要看清,不要不分公母,造成无法连接接头。
485通讯波特率停止位
485通讯波特率停止位在进行串行通信时,波特率和停止位是两个重要的参数。
波特率指的是每秒传输的比特数,而停止位则是在每个数据字节传输结束后,发送端发送的一位或多位的信号。
本文将围绕485通讯波特率和停止位展开讨论,探究其相关原理和实际应用。
一、485通讯波特率485通讯是一种用于远距离串行通信的标准,它可以支持多个设备在同一条通信线上进行通信。
在485通讯中,波特率是一个重要的参数,它决定了数据传输的速率。
波特率越高,数据传输速度越快,但也会增加传输错误的可能性。
常见的485通讯波特率有9600、19200、38400、57600等,可以根据实际需求进行选择。
在设置485通讯波特率时,需要保证发送端和接收端的波特率相同,否则数据无法正确传输。
一般情况下,发送端和接收端的波特率是由用户自行设定的,但也有一些设备采用固定的波特率。
在进行485通讯时,用户需要事先确定好通讯双方的波特率,以保证数据能够正常传输。
二、485通讯停止位停止位是在每个数据字节传输结束后,发送端发送的一位或多位的信号。
在485通讯中,停止位的作用是用来标识数据传输的结束。
常见的停止位有1位、1.5位和2位,其中1位是最常用的设置。
停止位的选择应根据实际情况来确定,一般情况下,1位的停止位已能满足大部分通信需求。
在进行485通讯时,发送端和接收端的停止位设置必须一致,否则会导致数据传输错误。
如果发送端设置的停止位大于接收端的停止位,接收端有可能将停止位误认为数据位,从而导致数据解析错误。
因此,在进行485通讯时,必须保证通讯双方的停止位设置一致。
三、485通讯波特率和停止位的选择在实际应用中,选择合适的485通讯波特率和停止位非常重要。
波特率的选择应根据通信距离和数据传输要求来确定。
如果通信距离较短,可以选择较高的波特率,以提高数据传输速率。
如果通信距离较长或环境干扰较大,应选择较低的波特率,以提高数据传输的可靠性。
停止位的选择应根据通信双方的要求来确定。
8mhz晶振 串口波特率
8mhz晶振串口波特率摘要:一、引言1.介绍8MHz 晶振和串口波特率的概念2.说明两者之间的关系二、8MHz 晶振的基本概念1.8MHz 晶振的定义2.8MHz 晶振的应用领域3.8MHz 晶振的主要性能指标三、串口波特率的基本概念1.串口波特率的定义2.串口波特率的应用领域3.串口波特率的主要性能指标四、8MHz 晶振与串口波特率的关系1.8MHz 晶振作为时钟信号源2.串口波特率与晶振频率的关系3.8MHz 晶振在串口通信中的作用五、实际应用案例1.基于8MHz 晶振的串口通信系统设计2.常见问题及解决方案六、总结1.总结全文内容2.强调8MHz 晶振与串口波特率的重要性正文:一、引言在电子信息技术领域,8MHz 晶振和串口波特率是两个非常重要的概念。
它们在许多电子设备和通信系统中都有着广泛的应用。
本文将详细介绍8MHz 晶振和串口波特率的基本概念,以及它们之间的关系。
二、8MHz 晶振的基本概念8MHz 晶振是一种频率为8MHz 的晶体振荡器。
晶体振荡器是一种能够产生稳定、精确的频率信号的电子元件。
8MHz 晶振的主要应用领域包括通信、计算机、消费电子等。
它的主要性能指标包括频率精度、频率稳定性、功耗等。
三、串口波特率的基本概念串口波特率是指在串行通信中,每秒钟传输的比特数。
它用于衡量串行通信的传输速率。
串口波特率的应用领域同样包括通信、计算机、消费电子等。
它的主要性能指标包括传输速率、传输距离等。
四、8MHz 晶振与串口波特率的关系在串行通信系统中,8MHz 晶振作为时钟信号源,为整个系统提供稳定的时间基准。
串口波特率与晶振频率之间存在直接的关系,根据公式:串口波特率= 晶振频率/ 波特率因子。
因此,通过改变晶振频率,可以实现不同串口波特率的设置。
在实际应用中,8MHz 晶振在串口通信中的作用主要体现在:确保数据传输的准确性、实时性以及稳定性。
五、实际应用案例以基于8MHz 晶振的串口通信系统设计为例,系统设计过程中需要考虑晶振的选择、波特率的设置、通信协议的制定等问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
波特率连续可调的串口通信技术
摘要在基于PCI接口波特率连续可调的串口通信技术中,串口通信模块作为整个PCI 接口功能的本地模块,是实现PCI接口模块与外部串口信息的沟通。
文中介绍了波特率连续可调技术的实现原理和方法,并基于PCI接口和FPGA技术完成通信模块的实现与测试验证。
其具有设计的灵活性和应用的广泛性。
关键词PCI接口;串口通信;波特率连续可调;DDS;FPGA
基于PCI总线的串口通信技术,在工业领域中有着重要的应用。
而目前市场上基于PCI 总线的串口通信卡,虽然可以实现多串口收发且波特率可调,但可调的波特率只是几个点,不能实现连续可调。
但在一些军事通信中,经常会需要波特率连续可调,以满足军事通信中对波特率的特殊要求。
文中基于这个要求,采用硬件描述语言,实现这一功能要求在FPGA 上的研究、开发、测试与验证。
1 波特率连续可调的串口通信
1.1 串口通信中的波特率技术
在数据通信中,波特率等于每秒钟传输的数据位数。
在串行通讯中,收发双方基于同一波特率实现数据的发送与接收。
波特率即为发送或接收信号的频率。
1.2 波特率连续可调的DDS方法
1.2.1 设计要求
例如RS232标准中串行通信波特率的一般要求范围是300~115 200 bit·s-1。
而传统的串行通信卡支持波特率可调只是在某几点可调。
文中研究的目标是波特率连续可调,例如要求波特率在300~115 200 bit·s-1之间可以实现步进为1 bit·s-1甚至0.1 bit·s-1的调节。
改变波特率即改变信号发送或信号接收时钟的频率,可以采用对基准时钟进行数据分频的方法,但达不到调节的连续性。
文中采用改进的DDS方法,实现对发送时钟fclk步进为1 bit·s-1的调节。
1.2.2 DDS原理介绍
直接数字频率合成DDS(Direct Digital Synthesis)是种把一系列数字信号通过D/A 转换器转换为模拟信号的合成技术。
传统DDS的核心结构如图1所示。
输出频率可由式(1)确定。
其中,fclk是时钟频率;FCW是频率控制字;L为相位累加字的字长。
1.2.3 产生频率连续可调的时钟信号
在传统的DDS技术中,频率最小步进值的尾数不是零,给后续的频率合成造成不便,所以采用改进的DDS技术,循环相位累加器设定一个可调的最大值作为溢出值,最大值溢出后,以余值而不是以零作为下一次累加的起始值。
结构框图如图2所示。
改进后的DDS输出频率可由式(3)确定
最小频率精度可由式(4)确定
其中,Mode为循环相位累加器的最大值,即模值,可以预先设定。
N为一个周期所包含的采样点数。
Mode,N的取值要综合考虑fclk和FCW的值,以获得一个随FCW线性变化的fclk即实现了fclk随FCW变化而变化的连续可调。
1.2.4 采用的DDS技术
针对RS232标准中串行通信中波特率的一般要求范围300~115 200 bit·s-1,采用改进的DDS技术,基于FPGA,设计如图3所示的DDS模块。
其中的循环相位累加器模块DDS_adder模块,相位寄存器模块DDS_addr_gen是基于硬件描述语言设计的模块,ROM模块DDS_ROM是基于FPGA的宏模块。
在本设计中实现发送时钟fclk在300~115 200 bit·s-1范围内步进为0.1 bit·s-1的调节。
其中,Mode取7 812 500,N取4,fclk为外部晶振提供的频率为50 MHz时钟。
因此,有△F=1.6 FCW。
其中,FCW为应用程序所传送的实际控制频率的10倍,根据UART协议,发送时钟的频率至少是串口通信波特率的16倍。
所以,以上的参数设置即实现了步进为0.1 bit·s-1的连续可调的波特率设置。
1.2.5 连续可调信号的验证
文中DDS技术是基于FPGA实现的。
根据不同的频率控制字fword输入,经过几个过渡时钟后,DDS模块即可以稳定产生随频率变化的时钟信号fclk。
在图4的仿真中,所仿真的频率点是115 200 Hz,9 600 Hz,1 200 Hz,,对应的fword为0x00119400,0x00017700,0x00002EE0。
2 任意波特率串口通信模块
2.1 串口通信模块的框架
PCI接口模块向通信模块传送频率控制字,发送的数据,发送命令和接受命令。
从通信模块获取中断信号,接收的数据。
频率控制字fword经过DDS模块,产生COM模块所需的发送时钟频率,COM模块接收数据或发送数据受控于PCI接口模块,实现与外部串口的数据沟通,总体框架如图5所示。
2.2 串口通信模块
串口通信模块COM要实现数据的接收和发送双向工作,接收和发送均采用FIFO的方式,发送FIFO满,即自动向外部端口发送数据,接收FIFO半满即自动将FIFO中的数据向上传输。
采用FIFO结构,而不采用RAM,可以免去复杂的地址问题。
COM模块的设计框架如图6所示。
包括:rcvFIFO实现从串口接收数据的和用于Rcv 模块。
txmitFIFO实现向串口发送数据的和用于Tmit模块。
从PCI接口传送过来的数据是32位的,经过txmitFIFO,32位数据分4次传送到Txmit 模块。
2.3 设计方案的验证
2.3.1 COM中各个模块的功能验证
要保证COM模块可以实现数据的发送与接收,其中的各模块必须实现各自的功能,再将各模块连接起来。
例如其中Rcv模块实现串口数据的接收,接收数据的频率由DDS接口产生的时钟信号fclk控制。
接收的数据发送到revFIFO中。
Rcv模块接受数据的仿真波形如图7所示,串口接收的数据是1,0,1,0,1,0,1,0,发出的数据是10101010。
2.3.2 COM模块功能的验证
各模块的功能验证通过后,再将各个模块连接起来,完成COM模块的设计,图8所示为COM模块发送端口的波形图。
频率控制字是0x00119 400,DDS模块产生发送时钟fclk,Serial_port输出即为输出串口。
3 应用前景
文中研究的波特率连续可调的串口通信模块是基于PCI接口的,其在工业控制中有着广泛应用。
实现频率连续可调可以满足很多特殊需求。
PCI接口的设计和通信模块的设计可以
同时基于FPGA,实现设计的灵活性。
设计方案中只实现了一收一发的功能,基于本设计可以扩展成多串口的波特率连续可调的通信卡。