磁浮列车测速定位装置
基于跟踪微分器的磁浮列车定位测速系统信号处理问题研究
基于跟踪微分器的磁浮列车定位测速系统信号处理问题研究窦峰山;何洪礼;谢云德;何宁【摘要】采用同步直线电机牵引的高速磁浮列车长定子轨道是不连续的,一般采用长定子模块拼接而成。
为了轨道安装的方便及考虑到温度变形效应影响,在相邻长定子模块间留有一定的接缝,这使得相对位置传感器输出的磁极相角信号存在畸变,而且不同长度的接缝导致的信号畸变情况也不同。
针对该问题本文采用了一种新型跟踪微分器(TD),用于解决轨道接缝导致的信号畸变问题。
通过仿真与实验对模型与算法进行了验证,结果表明新型快速非线性跟踪微分器能较好解决过轨道大、小接缝时的信号畸变问题。
%The track of the high speed maglev train propelled by the synchronization linear motor consists of longstators,which is discontinuous.The track is formed by long stator packs that were joined together.For the sake of convenience for track installation and considering the influence of temperature deformation effect, certain joint gaps between the adjacent stator packs were reserved,which gave rise to different levels of distor-tion of magnetic phase angle signals of the relative position sensors,given different lengths of joint gaps.In this paper,a new tracking differentiator was adopted to solve the problem of signal distortion caused by joint gaps of long stators.The model and algorithm were verified by simulation and experiment.The results showed that the new fast nonlinear tracking differentiator is feasible to eliminate the signal distortion when relative po-sition sensors pass through the long or short joints of long stators.【期刊名称】《铁道学报》【年(卷),期】2016(000)001【总页数】5页(P81-85)【关键词】磁浮列车;信号畸变;快速非线性跟踪微分器;轨道接缝【作者】窦峰山;何洪礼;谢云德;何宁【作者单位】国防科学技术大学机电工程与自动化学院,湖南长沙 410073;国防科学技术大学机电工程与自动化学院,湖南长沙 410073;国防科学技术大学机电工程与自动化学院,湖南长沙 410073;国防科学技术大学机电工程与自动化学院,湖南长沙 410073【正文语种】中文【中图分类】U237高速磁浮列车采用的绝对定位与相对定位相结合的定位测速技术在列车运行控制中起到了关键作用,其高精确性和高可靠性得到了实际验证[1-2]。
【doc】高速磁悬浮列车测速与定位系统的设计
高速磁悬浮列车测速与定位系统的设计第31卷ot.3l第3期№3计算机工程ComputerEngineering2005年2月February2005博士论文?~tJl1%t:1000----3428(2005)03—0ol2—03文献标识码:A中圈分类号:U237高速磁悬浮列车测速与定位系统的设计钱存元,韩正之’,群,谢维达(1.上海交通大学自动化系,上海200030;2.同济大学电气工程系,上海200092)摘要:介绍了一种高速磁浮列车测速与定位试验系统,该系统包括长定子直线同步电机齿槽计数测速与相对定位系统和感应式编码绝对定位系统两部分.详细阐述了系统的工作原理,硬件构成以及信号处理技术.关健词:高速磁悬浮列车;测速定位;DSP;CPLDDesign0fSpeedandPositionDetectionSystemforHigh—speedMaglev QIANCunyuan2HANZhengzhi’,SHAODerong2,ⅪEWeid(1.Dept.ofAutomation,ShaulIghaiJiaotongUniversity,Shanghai200030;2 .Dept.ofElectricEngineering,TongjiUnivcrsity,Shanghai200092) IAbstractlAspeedandpositiondetectionsystemforI1igh?speedmaglevwhi chconsistsofaspeedmeasuringandrelativepositioningsubsystem basedondetectingcog-slotsofthelong-statorsynchronouslinearmotoranda nabsolutepositioningsubsystembasedoninductivecodingisintroduced. Theprinciples,hardwarestructureandsignalprocessingofthcsystemareeluc idated.Alsoexperimentalresultsarcpresented[Keywords]High:speedmaglev;Speedandpositiondetection;DSP;CPLD 磁悬浮列车是一项新技术,实现了人类梦寐以求的非接触式陆上交通运输.为了磁悬浮列车的安全运营,实现列车的精确定位和牵引方向的速度闭环控制,必须在磁悬浮列车上安装测速和测位置的传感器系统.由于磁悬浮列车没有车轮,运行时车辆与轨道之间没有接触,因此,不能直接引用轮轨铁路中的测速定位方法.近年来,国内主要研究的是常导中低速磁悬浮列车的测速与定位技术”.本文以浦东商业运营的德国TR高速磁悬浮列车为对象,借鉴轮轨交通中应答器和车轮测速相结合的测速定位方法,设计了一套由齿槽计数测速与相对定位系统和感应式编码绝对定位系统构成的高速磁悬浮列车的测速与定位系统.目前,该系统已经通过实验室模拟试验,测速准确,定位可靠.1齿槽计数测速与相对定位系统TR高速磁悬浮列车采用长定子同步直线电机实现列车的牵引和制动,电机转子安装在车辆上,带铁芯的长定子绕组安装在轨道线路上,定子槽形为矩形开口槽,齿槽距为86mm,齿/槽均匀分布,各占43mm.根据长定子铁芯的这种结构特点,将安装在线路上的长定子铁芯作为测量的参照物,利用安装在磁浮列车上的传感器对列车运行中经过的定子齿槽数进行检测,计算出列车的位置信息,进而确定列车运行的瞬时速度.1.1硬件构成田I齿槽计致速与相对定位系统齿槽计数测速与相对定位系统主要由测速传感器,DSP信号处理系统以及监控主机3部分构成.当列车在线路上运行时,测速传感器将裢跚的长定子直线电机的齿槽信号转换成周期随列车速度变化的正弦信号,送入高速DSP数据处~12一理系统进行采样,模数转换并计算出列车的运行速度和行驶距离,再通过RS232串行口传送给监控主机进行处理和显示,如图l所示.1.1.1测速传感器系统安装在磁悬浮列车上,需采用非接触式的齿槽计数测量技术.常用的非接触式传感器有电磁式,电感式,电涡流式和霍尔式等,由于磁悬浮轨道上有强大的电磁场,只有电感式和电涡流式的传感器比较适用.经过试验对比分析, 采用了变截面式电感式传感器.根据电磁场理论,自感电感式传感器线圈的电为:.N2Sg=~2其中,L为电感量,N为线圈匝数,为气隙导磁率,s为气隙截面积,6为气隙长度.TR磁悬浮列车运行时悬浮气隙基本保持在l0mm左右,可以认为6不变,当线圈匝数N 确定后,探头线圈的电感L将随气隙截面积s的变化而变化.这样,当列车在线路上运行时,传感器探头线圈与定子齿面(或槽面)的相对面积发生变化,引起探头线圈电感量发生变化,通过测量电路将这个电感量的变化转换为电压或电流的变化来处理.设磁路中截面积的变化量为,则△£:△2可见,传感器的电感改变量△L_与传感器磁路截面积的改变量AS为线性关系,因此,在传感器的后续信号处理电路中不需要再加入线性补偿环节.为提高传感器的灵敏度和抗干扰能力,在该系统中将两个传感器探头线圈差动连接,这样当一个线圈位于齿面上方电感量为最大值时,另一基金】91日:国家”863”计划重大专项经费资助项目(2001AA505000) 作者倚介:钱存元(1972一),男,博士生,讲师,主研方向:智能控制以及计算机控制与检测技术;韩正之,教授,博导;邵德荣,高工;谢维达,教授定奠日期:2004—01-19E-mail:cy—*************.cn个线圈则位于槽面上方电感量为最小值.采用这种连接方式不但有助于信号的提取与处理,而且可以消除齿槽谐波磁场的影响.传感器的硬件构成如图2所示.◇一/,0,I女竹发’1-』Jj率jf胁《器线十¨触榆波低通滤波f竹}输i图2速传囊器的硬件结构1.1.2DSP信号处理系统高速磁悬浮列车的运行速度高达400~5o0km/h,为了保证测速实时性和测量的准确性,采用基于TI公司的32位浮点通用数字信号处理芯片TMS320VC33J的高速DSP信号处理系统.TMS320VC33内部采用多条总线连接,中央处理单元包含一个32位的浮点乘法器和一个算术逻辑单元.可以在一条指令内实现乘一加操作,其专门的硬件地址生成机制保证对存储空间寻址的灵活性,l6MB的存储空间为应用提供丰富的资源,这些都为实现高性能的信号处理提供了保障.此外,系统扩展有SRAM,FLASHROM,通用异步串行口UART及高速AD等,并由CPLD实现内部时序和控制逻辑.1.2信号处理上述变截面式电感式传感器的输出波形对应于齿槽周期为理想正弦波,列车运行中在线路上任一时刻的位置,通过对传感器输出电压求反三角函数计算获得.由于测速传感器输出电压是随传感器探头与轨道齿槽的正对面积的变化而变化的,因此,当列车静止时,传感器输出的电压并不一定为零.在列车由”静止一运行一停车”的运营过程中,传感器的输出波形可用图3表示.图中D.和D.区域表示列车处于静止状态,区域表示列车处于运行状态.电压图3列车运营时电■式传■器的出波形I.2.1行驶距离(相对位置)已知定子齿(槽)宽为43mm,设传感器输出的正弦波的峰值为A.当列车静止时,测得传感器的输出电压为;当列车开始运行后,根据信号采样值的变化特点确定处于波形的上升段还是下降段,根据表1一计算公式,求得列车运行起点距离第一个零点的距离.表lSi(浮l,2)计算公式厶下降段厶:..一-()0厶:x(一)丌2AL丌:d--~(一厶)丌上升段4:2yF-C05-1(粤)丌厶:x(一厶)丌厶2丌:(2丌一厶)丌同理,当列车停车后,也可以计算出列车停车终点距离最后一个零点的距离A.列车在运行过程中,传感器的输出电压每过一个零点,列车行驶距离就增加一个齿(槽)距离43mm.设列车经过的齿和槽的总数为13,则列车行驶的总距离S为:S=SI+n×43+SI(ram)(3)1.2.2运行速度运行速度V由列车运行中相对位置随时间的变化来推算,即:△f式中,AS为列车相对位置的变化量,△t为两次位置变化的时间间隔.在本系统中为简化数据处理,取为一个齿(槽)周期,正弦波相邻两次过零时间为tt(.=1,2,…),则列车的速度近似为:0.043V=■—_m/s(5),,+I_.,1.2.3误差来源及解决方法在上述理论分析中,必须保证磁悬浮列车运行中的悬浮气隙应基本稳定.当列车处于半个槽齿周期(对应于43mm)之内时,其位置的确定是通过反三角函数的计算来实现的.如果列车运行过程中悬浮气隙变化很大,则传感器输出信号的幅度也变化很大,使得列车位置的计算带来较大的误差,使定位精度降低.此外,正弦信号在波峰(波谷)附近有一段变化不灵敏的区域,在此区域电感式传感器输出的电压信号变化很小,也会造成该区域内定位分辨率减小.解决悬浮气隙的变化位置计算的影响,采取的方法是:(I)由于列车运行时速度不能突变,可以认为通过相邻两个齿槽时的悬浮气隙基本不变,因此,在计算当前弧度时可采用参考前一个齿槽周期正弦波幅值的方法(2)在DSP进行信号处理时,当测量到正弦波的波峰或波谷时,不论计算出的弧度是多少,都将弧度值重新没定为Ⅱ或者2Ⅱ,从而在每个齿(槽)周期就对计算值修正一次.(3)对AdD采样所得的数字信号采用滑动窗13数字滤波技术,剔除突跳的采样数值.提高齿槽计数定位测量的相对定位精度,则采用多相传感器的测量方法.系统中采用两个性能参数匹配的电感式传感器,进行相互修正.其安装位置相距半个齿(槽)距离,即21.5mm(对应于正弦信号的90.),这样,当一个传感器的输出信号接近峰值时(测量的不灵敏区),另一个传感器的输出信号则接近零点(测量的灵敏区),始终保证两个传感器中的一个处于测量灵敏区,通过同步测量两个传感器灵敏区的输出信号并进行数据融合,就保证了相对定位精度的要求.2感应式编码绝对定位系统应用齿槽计数进行测速定位只能实现列车的相对定位,而相对定位的误差会随着时间积累,所以必须每隔一定距离就要对列车的位置进行修正.测定磁悬浮列车绝对位置的方法有脉宽编码式定位和应答器方式定位等,本文主要研究感应式编码实现列车的绝对定位.2.1硬件构成感应式编码绝对定位系统由安装在线路上表示绝x,J-~理位置的无源数字编码板(简称定位标志板)和车载有源定位标志板读码传感器(简称读码传感器)及其信号处理电路两大部分组成,采用感应式编码的非接触测量技术,硬件框图如图一13—4所示.!.!!j信I,i;发rl电跚定位信I输:If渡专感}}}}图4绝对定位系统的硬件结构车载读码传感器采用u型槽结构,传感器两侧分别布置有多组发送线圈和接收线圈,发送线圈不断发射大功率高频脉冲信号,在传感器内部产生交变的磁场.根据电磁感应原理,当读码传感器不通过定位标志板时,接收线圈可接收到发送线圈的高频脉冲信号;而当读码传感器通过定位标志板时,定位标志板将会引起读码传感器内部磁场的变化,使得接收线圈中的感应电势发生变化.将感应电势放大,整形等信号调理后转换成数字信号,再经过CPLD信号处理电路即可解码出定位标志板上的绝对位置信息.2.1.I定位标志板定位标志板由位置基准板和功能面组成,采用印制电路板PCB工艺制作,如图5所示.玳板编fij5守缝功能编帕定f杯忠扳I冬{解fi}5肝农÷晌_进川苦息圈5定位螺考援位置基准板是一块塑料板(长度=262mm,高度=150ram,厚度----5.1mm),起固定作用;功能面由塑料板上敷铜而成(长=258mm,高度一80mm,厚度≥35m),并留有4个2ram宽的编码窄缝,如图5所示.窄缝编码规则为:(1)为了保证数据采集的准确性,使用二进制循环码编码;(2)相对于二进制区域的几何中心(图中虚线),左边的窄缝表示二进制的”1”,右边的则表示二进制数”0”.如图5中所示的定位标志板编码信息为”10l1”.2.1.2高频信号发生器高频信号发生器的硬件结构比较简单,由有源晶振和功率放大器构成,但其发送频率的选择是个关键问题.根据电磁场理论,当电磁波在良性导体中传播5倍趋肤深度后,可以认为已经完全衰.定位标志板的敷铜面为良性导体,当读码器通过定位标志板中时,由于发送线圈离定位标志板较近(约为20~30mm),故发送的电磁波可以看作是平面波.在标志板敷铜厚度一定的情况下,通过适当调节发送频率,可以使得趋肤深度小于1,5铜面厚度,就有效地屏蔽了电磁波通过敷铜面.而标志板上的编码窄缝是塑料,为良性介质,对电磁波的衰减很小,电磁波能够有效地通过编码窄缝.这样,通过处理接收线圈中的感应信号,就可以分辨出定位标志板上的敷铜面和编码窄缝,从而读出定位标志板上“0”和”1”的编码信息.在对不同频段进行试验后发现:住UHF频段(3o0~3000MHz),接收线圈对定位标志板上的”0”和”1”的信号以及敷铜层的相对位置的灵敏度最高,但稳定性最差,并且发射频率稳定性也较差;在VHF频段(30~300MHz),接收线圈对定位标志板上的”0”和”1”的信号以及敷铜层的相对位置的灵敏度较好,同时发射功率可以适当提高;在HF频段(1~2MHz),电磁波在敷铜层中不能被完全衰减掉, 接收线圈中对定位标志板上的”0”和”1”的信号的幅度差相对较小,但由于发送功率可以很大,在发送与接收线圈距离固定的情况下,接收电路的信号输出波形也非常稳定.因此,设计中的高频信号的发送频率为1MHz.2,1.3读码器传感器考虑到列车双向行驶的需要,u型槽读码传感器的两侧布置有发送,接收线圈共l10组,如图6所示.发送线圈的编号从左到右依次为S.~S..,接收线圈的编号分别为:L.,,k,Lq;To,T.;,R3,R2,R.,其中L,~L|,R,~线圈为两组读码线圈,,T,线圈为读码同步线圈,同步线圈的作用是:读码传感器经过定位标志板的适当位置时,将产生读码同步信号,触发相应的读码线圈读取定位标志板上的编码信息.读码线圈的作用是:由同步线圈的触发信号控制,读出当前位置上定位标志板的相应位的信息.通过同步线圈与读码线圈的配合,可一次读出定位标志板上的4位编码信息. 读码器的运行方向(列车的运行方向)决定了哪组读码线圈工作.在图6中,当读码器相对于定位标志板从左向右运动时,读码线圈R.~在同步信号触发下读取信息,否则由LrLq读码.+J…羔3~蔓’’l(11..!一j口【_j口L-j3i[j一itl-11I::i一一一一...~.一_}(“)I视(h)萼lSlS2sSSSSus;一=..一一.一一.’..】l_I_…一L.LL,L T..J’R,R.II(c)俯圈6读碍传■嚣的鳍桷2.2基亍℃PLD的信息解码高速磁悬浮列车的运行速度达40o~500km/h,而定位标志板上的编码窄缝的宽度仅为2mm,读码线圈的有效信号为微秒级.为保证解码的快速准确,简化电路设计和提高系统的可靠性,采用一片CPLDEMPTI28S实现了信号的解码.此外,CPLD器件可以通过JTAG接口实现在线编程修改电路,这大大提高了电路设计的灵活性.CPLD~码电路框图如图7所示.其中,z.~乙,Y.~及P.,Po分别为两组读码线圈L.~乙,R.~和同步触发线圈T.,T0的电磁感应信号经过放大,整形等信号调理后输出的数字信号,RESET~lN为外部复位信号.CPLD上电复位或手动复位后,首_先清除所有触发器和锁存器的状态,然后由”运行方向判别电路”根据读码线圈中的信号产生列车运行方向信号;再在方向信号的控制下由(下转第63页)㈨码路一∽瞄一叫●—理路一信调电;:●;具的具体说明请参考文献【5J),并且对同步装置l的MTBF进行估计.4.1静态时序将Synopsys公司的Astro布线(routing)后得到的DSPF(包含连线时延的时序信息)文件导入Synopsys公司的PrimeTime,得到静态时序分析报告,如表2所示.有MI_ CLK,M6CLK,SlCLK和SOCLK共4个路径组,每个路径组的时问差(Slack)都是正值,代表各路径组内部的时序不违反建立时间(setup—time)要求.表2尊态时序slack(m)107353976247658l1.I.1.I.I4.2电路面积电路面积报告见表3.表中TOP指总设计;SYNl指同步装置l;SYN2指同步装置2;GRA Y指格雷码编解码模块;DIV6指6分频时钟模块(GRA Y和DIV6都包含于SYNl 和SYN2中).可见,同步装置仅占电路总面积的l0.02%,这是从成本考虑只采用2级D触发器构成同步装置的结果.表3电路面积lDesignTOPSYNISYN2GRA YDIV6lArea(fl/n.)24734ll3428Il3623606296ISYN/Topfl3428+l3621/24734l=lO.02%4.3动态时序不同时钟域之间的时序分析需要借助动态时序分析.将Astro,~i线后得到的SDF(包含连线的所有路径的时序信息)文件导入Synopsys公司的VCS进行反标,仿真精度为l0ps,其结果如表4所示,作如下说明:(1)仿真时间为676054000ps;(2)同步装置l(SYN1)有4个可能发生同步错误的时间点(Error point),其中类型2信号2个,类型3信号2个;同步装置2(SYN2,表中未列出)没有可能发生同步错误的时间点;(3)同步装置l的采样周期为36ns,而总仿真过程有(t8780676054000/l000/36)个这样的采样周期,所以得到可能发生同步错误的时间点数对总采样周期数的比率为0.02l3%(2.t3E一4). 可见,可能发生同步错误的机会很少.(上接第14页)“解码数据输出选择电路”选取z.~z或Y.~Y冲的一路信号作为输出;最后在”同步信号发生电路”的作用下将4位有效的解码信号经”解码数据输出锁存电路”输出.图7CPLD码电路框图3结束语’本文介绍了一种高速磁悬浮列车的测速与定位系统,测速系统由电感式传感器和DSP数字信号处理器组成;绝对定位系统由高频脉冲电磁感应式传感器和CPLD信号处理电路组成.系统的测速和定位功能相辅相成:在相邻两个定位标表4SDF反标结果Errorpoint(ps)Type228775564.I3l339564SYNlType328775564.13l339564Simtime(ps)676054000ITotalcyclel18780Errorrate4,l8780:2l3E.44.4同步装置1的MTBF估计比较式(3)和式(5)可见,类型2和类型3信号同步装置的MTBF(MTBF1)较小,因此可以作为衡量本设计同步装置性能的标准.根据式(5),为了计算MTBF,,需给出T0和T的常规值,TO0.5ns,T一500ps(因为这些参数是与工艺相关的,本设计无法改变,所以对其作正确的数量级估计是可行的);并且由静态时序分析可得,Tp=0.55ns,Td=0.66ns,将这些数据代入式(5),得MTBFl一2.6X10年(如果用CLK控制同步装置I得到的MTBF仅为7s),即电路连续运行2,6X10年才可能发生一次同步错误.可见,对于第4.3节中4个可能发生同步错误的时间点,实际发生同步错误的概率极小.5总结本设计基于多时钟域同步装置的基本概念,从系统的角度优化AC.97音频控制器同步装置的特性,并提出多时钟域电路综合的正确方法.从设计结果可见,本设计各路径组时序正确,同步装置占用电路面积小,可能发生同步错误的时间点少,MTBF大.综合这4个方面可见,本音频控制器性能高成本低,可以为”汉芯”DSP内核提供良好的数字音频处理功能.参考文献lInte1.AudioCodec’97,Revision2.3,Revisiont.0.2002?042CummingsCE.SynthesisandScriptingTechniquesforDesigning Multi?asynchronousClockDesigns.SNUG-200tSanJose,CA V oted Bestpaper,200l3WalkerJ.CantoniA.ANewSynchronizerDesign.IEEETrans.Corn- puters,1996,45(I1):t308-l3Il4RabaeyJM.DigitalIntegratedCircuitsaDesignPerspective.Prentice. Hall,l996:533-5385Synopsys.SOLD.2003-06志板之间通过检测同步电机的定子齿槽数作为列车相对位置的标识,一旦发生齿槽漏检和速度计算误差,位置信息可以在定位标志板处得到修正;若在某个定位标志板处未能检测到定位信息,可以继续通过检测齿槽数来计算位置信息,而在下一个定位标志板处再对位置信息进行修正.因此,在它们的共同作用下,个别冗余或错误信息不会对列车运行造成障碍.在实验室环境下模拟试验表明,系统测速准确,测距误差小于l0mm,相对定位精度可达4.3ram,绝对定位准确可靠,可以满足TR高速磁悬浮列车运行控制系统的要求.不过,该系统目前尚处于实验室试验阶段,系统的可靠性及电磁兼容性还有待于进一步验证和完善,这将是后续研究工作的重点内容.参考文献l杨建勇,连级三.磁悬浮列车测速及数据传输方法研究…铁道学报,200l,23(I】:60.652龙志强,任永平,刘曙生等.基于交叉感应回线的磁悬浮列车测速定位系统….传感器技术,200l,20(7):5l-52,553刘君华.智能传感器系统[M】.西安:西安电子科技大学出版社, l9954TexasInstrumen ts.TM$320C3XUser’sGuide.1997—_I53—。
磁浮铁路技术标准

磁浮铁路技术标准磁浮铁路技术标准的制订是为了规范和指导磁浮铁路的建设和运营,保障磁浮铁路的安全、可靠、高效运营。
磁浮铁路技术标准必须符合国家法律法规和相关政策规定,同时还需综合考虑国际标准和行业最佳实践,确保磁浮铁路系统在国内外具有竞争力。
磁浮铁路技术标准包括磁浮列车、轨道、供电系统、信号系统、车站设备等方面的技术规范。
一、磁浮列车技术标准1. 列车设计标准:包括列车车身结构、车轮、悬挂系统、车辆控制系统等方面的设计要求,保证列车的安全、稳定、舒适。
2. 列车运营标准:明确列车的起动加速度、制动性能、最大运行速度等指标,确保列车在实际运营过程中的安全和运行效率。
3. 列车车辆检修标准:规定列车的检修周期、检修项目、检修设备和工艺流程,保证列车设备的可靠性和安全性。
二、轨道技术标准1. 轨道设计标准:包括轨道几何、轨道结构、轨道连接等方面的设计要求,确保轨道的平顺度和稳定性。
2. 轨道施工标准:规定轨道的施工工艺、施工设备、施工质量等要求,确保轨道施工的安全和质量。
3. 轨道维护标准:明确轨道的巡检周期、维修项目、维护设备和工艺流程,保证轨道的长期稳定运行。
三、供电系统技术标准1. 供电系统设计标准:包括供电模式、供电设备、接触网等方面的设计要求,确保磁浮铁路的能量供应稳定可靠。
2. 供电系统施工标准:规定供电系统的施工工艺、施工设备、施工质量等要求,保证供电系统施工的安全和质量。
3. 供电系统运行维护标准:明确供电系统的运行监测、故障处理、维护周期等要求,保证供电系统的长期稳定运行。
四、信号系统技术标准1. 信号系统设计标准:包括列车控制系统、通信系统、信号设备等方面的设计要求,确保磁浮铁路的列车运行安全。
2. 信号系统施工标准:规定信号系统的施工工艺、施工设备、施工质量等要求,保证信号系统施工的安全和质量。
3. 信号系统运行维护标准:明确信号系统的运行监测、故障处理、维护周期等要求,保证信号系统的长期稳定运行。
简述列车定位的流程

列车定位的流程介绍列车定位是指通过一系列技术手段来确定列车在铁路系统中的位置,以确保列车运行的安全和准时。
随着铁路运输的发展,在列车定位技术方面取得了巨大的进展。
本文将详细介绍列车定位的流程和涉及的技术手段。
传感器数据采集列车定位是通过分析来自各种传感器的数据来实现的。
下面介绍几种常用的列车定位传感器。
1. GPS(全球定位系统)全球定位系统是一种通过卫星信号来测量地球上物体位置的系统。
在列车定位中,列车上安装的GPS接收器可以接收到卫星发射的信号,并通过计算时间差来确定列车的位置。
2. 惯性导航系统惯性导航系统利用加速度计和陀螺仪等传感器来测量列车的加速度和角速度,进而计算列车的位置。
它不依赖于卫星信号,因此在地下铁路和山区等没有卫星信号的地方也可以使用。
3. 里程计里程计通过测量列车车轮的转动来确定列车的位置。
它通常使用磁性传感器或光电传感器来感知车轮的旋转,并根据车轮的直径和转动次数计算列车运行的距离。
定位算法传感器采集的数据是杂乱无章的,需要通过定位算法来进行处理和分析,从而确定列车的准确位置。
下面介绍几种常用的定位算法。
1. 卡尔曼滤波卡尔曼滤波是一种递归的估计算法,它通过使用线性系统的状态方程和观测方程来对列车的位置进行估计。
它能够结合多个传感器的数据进行定位,并考虑到系统的动态性。
2. 扩展卡尔曼滤波扩展卡尔曼滤波是对非线性系统的卡尔曼滤波的扩展。
在列车定位中,由于列车运行速度较快,存在转弯等非线性运动,因此扩展卡尔曼滤波更适用于列车定位。
3. 粒子滤波粒子滤波是一种基于蒙特卡罗方法的定位算法。
它通过使用随机粒子来表示列车的可能位置,并根据传感器数据来更新粒子的权重,从而确定列车的位置。
定位误差校正由于各种传感器和定位算法本身存在误差,列车定位结果可能存在偏差。
因此,需要对定位结果进行校正,以提高定位的准确性。
1. 无线电信号强度指纹无线电信号强度指纹是一种基于信号衰减的定位方法。
磁浮列车模型定位系统的设计

位 精 度差 ,有 的需 要 大 量 的轨 旁 设 备 ,前期 成 本 和 后 期 维 修 费 用 高 。针 对 磁 浮 列 车 的特 点 ,本 文
提 出 了一 种 新 的 定 位 方 法 ,该 方 法 制 造 成 本 低 ,
维 护方便 ,适 用 于短途 运营 的磁 浮列 车 。
的长 度 ,否 则 就 无 法 保 证 列 车运 行 过 程 中始 终 有 磁控 开关 被 触 发 ,为 了保 证 磁控 开关 能够 被 电磁 铁 和 轨 道 间 的磁 场 触 发 而 不 能 被 电机 产生 的磁 场
触 发 ,磁 控 开 关安 装 轨 道 外 侧 。为 了 避免 磁 控 开
1 定 位 系 统 工 作原 理
本 文 采 用 磁 控 开 关 编 码 定位 技 术 ,利 用磁 控
‘个 Ln
开 关 在 磁 场 内导通 的原 理 ,当磁 浮 列 车 经过 磁 控 开关 时 , 由于 悬 浮 电 磁铁 与轨 道 间存 在 磁 场 ,在 该 磁 场 的作 用 下 ,磁 控 开关 导 通 ;当磁 浮 列 车 驶 过后 ,磁 场 消失 ,磁 控 开 关 断 开 。把 所 有 磁 控 开 关 导 通 和 断 开 的状 态 编 码 成 二 进制 数字 序 列 ,每
在 车 辆 悬 浮 架 上 的悬 浮 电磁 铁 与 轨 道 之 间 的吸 引 力 实 现 悬 浮 :利 用 固定 在 悬 浮 架 上 的导 向磁 铁 与 线 路 侧 向的 导 向轨 之 间 的 吸 引力 进 行 导 向 ;利 用
时 与 轨道 没 有物 理 接 触 。定 位 方 法 多 采用 无 线 方
关 出现 故 障 .每 两个 磁 控 开 关 采 用 并 联 方 式组 合
磁浮列车运行控制系统综述

磁浮列车运行控制系统综述摘要内容:运行控制系统是磁浮列车的重要安全保障。
列车的安全控制逻辑绝大部分由运行控制系统执行,目前国外发展较为成熟的运行控制系统为德国与日本设计。
本文阐述了德国与日本的运行控制系统,同时对国内的运行控制系统总结性的进行了一定的介绍。
关键词:运行控制系统分区运行控制车载运行控制磁浮列车0引言我国经济的区域性发展,人口聚集效应明显,但随之带来的是交通的拥堵,轨道交通已成为解决市内及城际间交通问题的有效手段。
随着轮轨列车逐渐达到速度极限,传统的动力方式已无法实现更高的速度要求,由此磁浮列车应运而生,磁浮列车采用抱轨运行方式,不存在列车脱轨风险,由于浮空运行,因此噪音极小。
目前磁浮交通已经在长沙、北京、上海等地相继开通,我国的磁浮交通行业开始进行实际运营阶段。
磁浮列车主要分为牵引、运行控制、线路、车辆等多个系统组成,其中运行控制系统对保障列车安全至关重要。
本文通过分析国内外的磁浮列车运行控制系统的技术特点,总结归纳了不同国家运行控制系统的发展情况。
1运行控制系统概述运行控制系统是磁浮交通的“大脑”,运行控制系统与多个系统耦合关联,包括车辆、牵引系统、线路系统等。
其将不同系统之间的数据进行判断整合、传输,实现系统间的通信及安全逻辑判断。
运行控制系统细分功能为:列车状态操作与显示、自动驾驶控制、驾驶模式转换、进路运行防护、道岔转辙防护、最大最小速度曲线监控、牵引安全切断控制、数据传输、制动触发等任务。
运行控制系统由中央控制CCS、分区控制DCS、车载控制VCS三部分构成。
中央运行控制系统是列车操作显示系统,主要包括三部分:自动运行控制、操作员终端系统、中央诊断系统。
车辆无线等系统将运行过程中的列车与线路状态实时反馈给中央操作员,中央操作员根据相关反馈手动完成磁浮列车运行时刻表的配置,设置列车数量、制动测试、线路信息添加、车辆控制等。
列车自动运行控制系统可对非CR校验指令进行自动排布,中央操作员根据实际运营经验对中央的指令按顺序进行设置,当执行时刻表时,自动运行控制系统将每条指令依次执行,充当操作员终端作用。
中低速磁浮列车测速定位系统的设计与实施

中低速磁浮列车测速定位系统的设计与实施[摘要]:主要研究了将感应无线车上测址技术应用于具有强电磁干扰的磁浮测速定位系统,并研究“实时电子计数脉冲+地址计算测速”的双重速度检测方法。
对提高感应回线测速定位系统的可靠性和抗干扰能力进行了一系列的实验、验证测试,为低速磁浮测速定位系统的工程化奠定了坚实的基础。
[关键词]:中低速磁浮测速定位中图分类号:tm383.3 文献标识码:tm 文章编号:1009-914x(2012)26-0312-01磁浮列车由于与轮式列车的本质不同,无法通过测试车轮的转角来确定车辆运行速度、方向和位置。
因此,低速磁浮列车速度和位置检测系统成为磁浮列车安全运行控制的一项关键技术。
1 系统设计1.1 检测距离的延伸感应无线车上测址技术用于焦炉机车定位时,一个检测单元的最大长度为409.6米,这在焦炉现场已经足够,但对于磁浮列车来说,显然远远不够,必需延长绝对位置检测距离,并且要将累积误差降到最低。
针对这个问题,将地面的载波信号发射装置采用分站方式。
每个地面站用四根电缆连(总长409.6米,即一个地址发射单元),这样,整个线路就会由n个站连接起来,站与站之间并无物理上的连接,而是通过给每个站一个唯一的编码来进行位置识别,车载控制器通过接收到的站号进行软件处理,使没任何物理连接的相邻两站的地址连接起来,这样机车就能得到轨道上的任何一处的绝对位置。
站号采用二进制编码,如果用三位,就可以分配给8个站。
以低速磁浮试验线工程为例,岔道加正线整个长度为1900米,共设6个站,每帧地址数据里就包含有3位站号信息。
地址数据的检测周期为6ms,每位码元约用167us,那么每个检测周期站号所占时间为0.5ms。
1.2 冗余设计为提高磁浮测速定位系统的可靠性,进行了一系列冗余设计:硬件冗余:磁浮列车的两个端车上各安装一套相互独立却完全一致的地址及速度检测系统,系统正常时,该两套装置检测的速度完全一致,检测的绝对地址为一固定差值(两端车的距离),列车上的牵引系统、atp系统可同时取用两组数据,在对数据进行纵向比较的同时进行横向比较,可有效的滤除非法数据,保证系统的稳定可靠;当一套系统出现异常时,经过故障诊断码及逻辑判断,可去除异常数据,仍能保证系统的正常运转。
中低速磁浮总体技术介绍

动态
≦2250Pa
运行环境:
海拔高度
≦1200m
相对空气湿度
≦100%
全天候运行,并能承受风、沙、雨、雪的侵袭
大气环境温度:
标准工况
-15ºC~+45ºC
车辆平稳性指标:不大于GB5599-1895 中规定的2.5
运控系统: ATC模式,包括ATO、ATP、ATS
Hale Waihona Puke 车钩:自动车钩供电方式:
载
测
控
测
载
天
系
制
系
天
线
统
系
统
线
2
2
统
1
1
车载子系统
编码电缆子系统
1#地面站 地面站子系统
终端箱
段间箱 段间箱
段间箱
编 码 电 缆
段间箱
段间箱 段间箱
3#地面站 4#地面站 5#地面站 6#地面站
终端箱 2#地面站
地面站子系统包括若干地址发生器箱,每一个箱内 有载波发生器和电源模块等
车载子系统由车载控制器、车载接口板、串口隔离 器、电源、天线箱组成。
行组织模式。虽然该模式满足了世博会期间的客流,
但对于中等规模城市的交通来讲,远不能满足单位 截面小时单方向2~3万人的要求。
在保证单方向2~3万人/小时 截面运能的条件下, 列车编组可为:E+M+M+M+M+M+M+E的8 节编组,满足的列车载客量不低于1080人,
车辆
坐席
站位
额定
超员
端车E 中车M 六节编组运能: 2×E+4×M
式实现列车位置信息的采集。利用速度位置脉冲, 车载设备可以计算出列车行驶的相对位移。沿线每 隔一定距离设置一个地面应答器,车辆经过时可以 得到所处的绝对位置,用以矫正交叉感应线圈带来 的累计误差。
浮动车法描述

浮动车法描述一、浮动车法的概念浮动车法是一种用于交通运输网络优化的方法,通过在城市道路上安装浮动车传感器来收集实时交通数据,并利用数据分析技术对交通状态进行监测和预测。
浮动车法可以提供准确的交通信息,帮助交通管理部门或企业做出合理的决策,优化交通流量并提升道路运输效率。
二、浮动车传感器的工作原理1.定位系统:浮动车传感器通常搭载了全球定位系统(GPS)装置,通过卫星定位来获取车辆的实时位置信息。
2.通信系统:浮动车传感器利用无线通信技术将采集到的数据传输到数据中心,常见的通信方式包括Wi-Fi、蜂窝网络、无线局域网等。
3.数据采集:浮动车传感器除了获取车辆位置外,还可以采集车速、加速度、转弯半径等数据,这些数据可以用于交通状态监测和分析。
三、浮动车法的应用领域1.交通管理:浮动车法可以提供实时的交通拥堵情况和车流量信息,交通管理部门可以根据这些信息做出合理的交通管控决策,如优化信号周期、调整道路限行措施等。
2.道路规划:浮动车法可以帮助道路规划者了解道路使用情况,确定道路改造和建设的方向,以提高道路通行能力和安全性。
3.出行建议:基于浮动车法获取的实时数据,交通管理部门可以向驾车者提供实时的交通出行建议,帮助他们选择最佳的出行路线,避免拥堵。
4.物流运输:浮动车法可以用于物流运输企业的货物配送优化,通过实时监测车辆的位置和行驶状况,合理调度车辆,提高配送效率。
四、浮动车法的优势和挑战优势1.实时性:浮动车法通过实时采集数据,可以提供准确的交通信息,避免了传统交通调查方法中的延迟问题。
2.精确性:浮动车传感器可以提供车辆位置和行驶状态等详细信息,可以更加准确地分析交通状况和预测未来的交通情况。
3.成本效益:相比传统的交通调查方法,浮动车法的成本更低,数据采集更加高效。
4.可扩展性:浮动车法可以灵活调整传感器的数量和位置,适用于不同规模和类型的交通网络。
挑战1.数据处理:浮动车法产生的数据量很大,对数据的处理和分析需要大量的计算资源和专业知识。
中低速磁浮车辆技术详解

托臂 抗侧装置滚装置:
抗侧滚片梁安装座通过螺栓固定在托臂上,每个抗侧滚片梁安装 座上有两个关节轴承。两片相同的抗侧滚通过垫片梁块组装成一 个片梁组件,通过关节轴承与抗侧滚片梁安装座相连,连接后该 部件能够绕垂直轴转动。抗侧滚片梁吊杆两端有关节轴承,通过 关节轴承将吊杆与另一边的抗侧滚片梁组件连接起来,吊杆在沿 杆长方向应具有一定的拉压弹性和限位功能,因此吊杆为金属橡 胶件,吊杆的弹性技术参数应通过计算分析来确定。
紧急救援支撑轮的作用?为什么是两个轮子? 牵引拉杆的作用?
悬浮电磁铁用于产生电磁吸力,采用同时具备悬浮 和导向功能的U型磁铁,F型悬浮导轨(被迫导向功 能)使列车在运行中与轨道无接触。每节车5个悬 浮架共10个电磁铁,总悬浮重量32t/节,每个磁 铁绕制4组相同的线圈。电磁铁上需安装制动器、 传感器、横向限位止挡、防吸死板等。
悬浮架装置是直线牵引电机、悬浮电磁铁、空气弹 簧悬挂系统等多种组件的安装基础,是走行机构的 核心结构部件。悬浮磁铁安装在悬浮托臂的固定座 上,布置在车辆的两侧。同样直线电机安装在纵梁 的下部,布置在车辆的两侧。空气弹簧悬挂系统以 悬浮托臂的上方的“基洞”为安装位置与其上部的 滑台固定。在纵梁上表面与滑台之间安装牵引拉杆 装置。
每个端车的其中两个悬浮架装置上各安装两对受流 器装置。
中低速磁浮列车走行机构主要由以下15个部分组成:
(1) 悬浮架;(2) 悬浮电磁铁;(3) 空气弹簧悬挂系 统;(4) 滑台装置;(5) 迫导向机构;(6) 抗侧滚装 置;(7) 制动装置;(8) 滑橇;(9) 限位止挡装置; (10) 电机悬挂装置;(11) 液压支撑装置;(12) 牵 引拉杆装置;(13) 受流器装置;(14) 管线布置; (15) 列车接地装置。
基于新型感应回线的磁浮列车车地通信及测速定位
感应 回线系统 电磁场分布进 行建模 , 明其信 号传输 信道 为 证 恒参信道 。论 证 了该 系统 既可 以实现 列车 的车地 通信 功 能 又 能实现 列车的测速定位 功能。对该 系统 的抗干 扰性 能做 了讨论 , 并针对实 际情况 中存在的位置偏移干扰对 系统的影
响进行 了仿真分析 。 关键 词 磁 浮列车,感应 回线,车地通信 ,测速定位 U 27 3 中图分类号
蜘 阍 南 错
W a gXu L h a g L n h Qi g n , i un ,o gZ i a Z n
I f r tv - b t a t A e 1 D d c be i d c in s se S n o ma ie a sr c n w ∞ e —a l u t y tms i n o d s n d t v ro h r d t n lid c ie r do’ i d a — e i e o o e c me t eta i o a u t a i Sd s v n g i n v a t g ,a d i s d fr t i o a ig,s e d me s r g a d d t ae s n u e o r n lc t s a n p e a u i aa n n ta s sin B sd o h s n w y tm , a lc r ma n t rn mi o . a e n t i e s s e s n ee t o g ei c
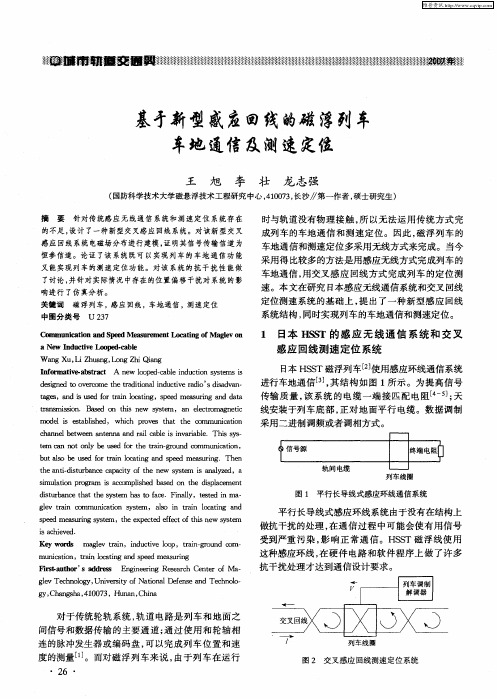
时与轨道没有物理接触 , 以无法运用传统方式完 所 成列车的车地通信 和测速定位。因此 , 磁浮列车 的 车地通 信和测速定位多采用无线方式来完成。当今 采用 得 比较 多 的方 法 是用 感应 无线 方式 完成 列车 的 车地通信 , 用交叉感应 回线方式 完成列车 的定位测
《中低速磁浮交通车辆通用技术条件》征求意见
((()(990ICSSCJ××××发布目次前言ﻩ错误!未定义书签。
1范围ﻩ错误!未定义书签。
2规范性引用文件.................................................................................................................. 错误!未定义书签。
3术语和定义ﻩ错误!未定义书签。
4使用条件ﻩ错误!未定义书签。
5车辆类型ﻩ错误!未定义书签。
6基本要求ﻩ错误!未定义书签。
7车辆限界ﻩ错误!未定义书签。
8车辆型式与列车编组............................................................................................................ 错误!未定义书签。
9车体及其内装设备................................................................................................................ 错误!未定义书签。
10走行机构ﻩ错误!未定义书签。
11电气系统ﻩ712牵引系统............................................................................................................................ 错误!未定义书签。
13悬浮导向系统ﻩ错误!未定义书签。
14制动系统ﻩ错误!未定义书签。
15供风系统.............................................................................................................................. 错误!未定义书签。
磁悬浮列车的定位装置及方法[发明专利]
![磁悬浮列车的定位装置及方法[发明专利]](https://img.taocdn.com/s3/m/239095cc58fb770bf68a55c3.png)
专利名称:磁悬浮列车的定位装置及方法
专利类型:发明专利
发明人:梅文庆,苏军贵,许义景,石煜,杨丽华,卢学云,张泰然申请号:CN201910864979.X
申请日:20190909
公开号:CN112455504A
公开日:
20210309
专利内容由知识产权出版社提供
摘要:本发明公开了一种磁悬浮列车的定位装置及方法,定位装置包括:若干个激光发射源,分别设置于轨道上,每一个激光发射源的位置分别与轨道梁上的一个长定子段的位置对应,每一个长定子段分别具有用于确定绝对位置的编码信息;反射源,设置于磁悬浮列车上;处理器,与反射源及每一个激光发射源通信连接,处理器被配置为响应于反射源反射光波信号,确定出发射该光波信号的激光发射源对应的长定子段的编码信息,并且根据编码信息确定出的绝对位置及光波信号的往返时间计算出磁悬浮列车的位置。
本发明采用光学测量的方式,不受周围电磁环境,受环境影响较小,测量速度快,提升了定位精度及可靠性,而且无需无线传输介质,从而有效地降低了成本投入。
申请人:中车株洲电力机车研究所有限公司,株洲中车时代电气股份有限公司
地址:412001 湖南省株洲市石峰区时代路169号
国籍:CN
代理机构:上海专利商标事务所有限公司
代理人:徐伟
更多信息请下载全文后查看。
磁浮列车无源信标定位磁极标识技术机理研究
现代电子技术Modern Electronics Technique2021年2月1日第44卷第3期Feb.2021Vol.44No.3DOI :10.16652/j.issn.1004⁃373x.2021.03.028引用格式:周发助,杨杰,高涛.磁浮列车无源信标定位磁极标识技术机理研究[J].现代电子技术,2021,44(3):130⁃133.0引言国内外磁悬浮列车测速定位技术方法有很多,如:交叉回线测速定位[1⁃3]、多普勒雷达测速定位[4⁃5]、微波测速定位[6⁃7]等。
在国内,中低速磁悬浮列车多采用交叉回线测速定位法,但交叉回线测速定位法基于对回线产生的磁场进行列车位置辨识,悬浮系统、导向系统、推进系统的电磁场以及安装误差、列车运行振动等因素皆会影响到交叉感应回线测速定位系统的定位精度。
另一方面,目前的列车节能运行与智能控制技术需要功能完善的列车超速防护(ATP )[8]、列车自动驾驶(ATO )[9⁃10]和列车自动监控(ATS )[11]等系统。
这些系统都需要以精确、高效、可靠的列车定位、测速技术为基础。
没有精确的列车定位、测速技术,再先进的优化算法也难以达到预期效果。
1无源信标定位磁码识别技术针对磁悬浮列车实时定位与测速,本文给出一种磁磁浮列车无源信标定位磁极标识技术机理研究周发助,杨杰,高涛(江西理工大学,江西赣州341000)摘要:磁浮列车测速定位技术对于列车运行安全及运输效率起着至关重要的作用。
依据国内外研究发展现状,给出一种三维磁编码式列车轨旁定位标识技术。
永磁体磁性分别代表相应数值,组合构成列车定位信息标识码,并且给出相应的磁码识别方法,然后由车载磁码解码器识读信息,实现对行驶磁浮列车的测速定位。
相比现有列车定位方式,该标识码具有结构简单、成本低、精度高、易于安装维护等优势,为未来高速磁悬浮列车发展提供了一定的技术参考。
关键词:磁浮列车;无源信标定位技术;磁极编码;测速定位技术;永磁体;磁码检测中图分类号:TN03⁃34;U238文献标识码:A文章编号:1004⁃373X (2021)03⁃0130⁃04Research on mechanism of magnetic pole identification technology for passive beacon positioning of magnetically levitated trainZHOU Fazhu ,YANG Jie ,GAO Tao(Jiangxi University of Science and Technology ,Ganzhou 341000,China )Abstract :The technology of speed measurement and positioning of the magnetically levitated (maglev )train plays a vital role in its operation safety and transportation efficiency.In view of this ,a new type of 3D trackside positioning and identification technology for magnetic ⁃coded train is proposed based on the status of research and development at home and abroad.The permanent magnet magnets are adopted to represent the corresponding values ,which are combined to generate train positioning information identification codes ,and the corresponding magnetic code identification methods are given.And then ,the vehicle⁃mounted magnetic code decoder reads the information to realize the speed measurement and positioning of the traveling maglevtrain.In comparison with the existing methods of train positioning ,the proposed identification code has several advantages ,including simple structure ,low cost ,high precision and easy installation &maintenance ,which provides a certain reference for the future development of high⁃speed maglev train.Keywords :maglev train ;passive beacon positioning technology ;magnetic pole coding ;speed measurementandpositioning technology ;permanent magnet ;magnetic code detection收稿日期:2020⁃06⁃18修回日期:2020⁃07⁃14基金项目:国家重点研发计划先进轨道交通专项(2017YFB1201105⁃12);悬挂式永磁磁浮轨道交通混合悬浮系统研究(GJJ190504);一种磁浮列车无源磁极编码定位技术(DC2019⁃065);基于物联网的超低功率混合磁浮系统研究(S202010407017)130第3期极编码技术对行进磁悬浮列车进行定位和测速,提高列车定位和测速的精确度,实现列车运行状况的有效监测。
160 kmh磁浮列车设计及应用研究
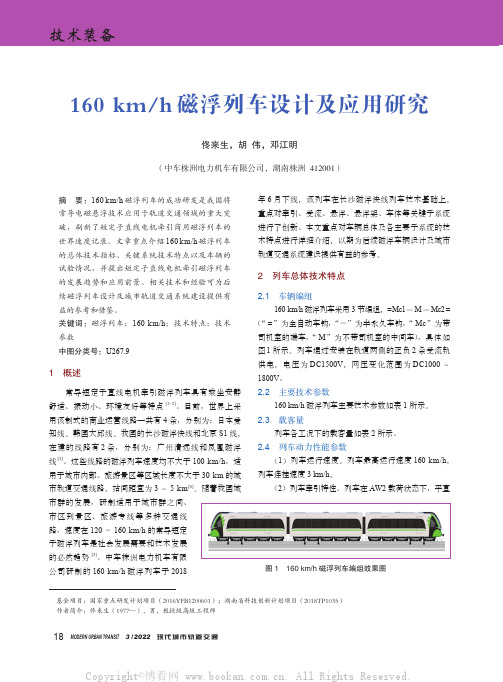
图1 160 km/h磁浮列车编组效果图度情况如图3所示。
3.2 内装内装采用碳纤维、聚碳酸酯、芳纶蜂窝等新型材料实现轻量化,如图4所示。
图2 牵引制动特性曲线速度 / km · h-10 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160牵引力(AW2)电制动力(AW2)图3 车体结构及静强度情况(单位:Mpa ).313E-1935.499 270.998 5106.498141.99717.749 653.248 988.748 1124.247159.747图4 内装效果图5 悬浮架单元注:MVB —多功能车辆总线;TCMS —列车网络控制和管理系统;EBCU —电子制动控制单元。
图6 制动原理框图Mc1车MVB 远程缓解紧急制动司控器指令司控器控制指令控制指令制动信息TCMSEBCU电液控制单元1电液控制单元2紧急按钮缓解按钮控制指令TCMS制动信息EBCU电液控制单元1电液控制单元2制动信息EBCU电液控制单元1电液控制单元2紧急按钮缓解按钮控制指令控制指令司控器Mc2车MVB 远程缓解紧急制动司控器指令载荷信息其他信号电制动载荷信息其他信号电制动载荷信息其他信号电制动液压夹钳液压夹钳液压夹钳液压夹钳管路管路管路管路液压夹钳液压夹钳管路管路零速信号保持缓解紧急牵引以太网零速信号保持缓解紧急牵引以太网M 车TCMS图7 直线电机应力和应变分析b 应变/ mmMax0.222 060.207 080.192 090.177 110.162 120.147 140.132 150.117 170.102 190.087 202 a 应力/ MpaMax336.16298.81261.46224.11186.76149.41112.0674.71537.3670.018 0534 直线感应电机强度有限元仿真结果最大等效应力/ MPa 最大变形位移(铁心底面)/ mm应力集中部件材料抗拉强度/ MPa 悬挂板:119铁芯:130.112悬挂板:235图8 测速系统注: BCU —制动控制单元;DCU —牵引控制单元;PWM —脉冲宽度调制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第24卷 第10期2005年10月国 外 电 子 测 量 技 术Foreign Elect ronic Measurement TechnologyVol.24,No.10Oct.,2005作者简介: 陈德林,男,上海同济大学控制科学与工程系硕士研究生。
研究与设计磁浮列车测速定位装置陈德林谢维达钱存元(同济大学控制科学与工程系 上海200092)摘要:随着数字信号处理理论和可编程数字信号处理器(DSP )芯片的发展,DSP 的应用越来越广泛。
本文介绍了用于磁浮列车测速的DSP 数据采集和处理部件,该部件包括模拟信号采样单元、DSP 处理单元、数据存储单元、逻辑控制单元。
并介绍了该部件与其他部分的通信接口方法。
实践证明该部件完全符合要求,有一定的实用价值。
关键词:数字信号处理器 数据采集 CPLD 虚拟仪器Speed detection system for m aglev train b ased on digital signal processorChen DelinXie WeidaQian Cunyuan(Depart ment of Cont rol S cience &Engineering ,Tong j i Universit y ,S hanghai 200092)Abstract :Wit h t he develop ment of digital signal processing t heory and programmable DSP chip ,DSP is used widely.This article completely int roduces data sampling and processing part based on DSP for maglev speed detection ,including analog signal sampling unit ,digital signal processing u 2nit ,data storage unit and logic cont rol unit ,it also includes the methods of communication with other parts.Practice shows that system part accords with the requirement ,and it is useful for practicality.K eyw ords :DSP ,data sampling ,CPLD ,virt ual inst rument.0 引言 磁浮列车在运行时,运行控制系统必须随时掌握线路上各次列车的行驶速度和确切位置,才能实现集中控制和调度,这项任务是由磁浮列车的测速定位装置来实现的。
在测速定位装置中最重要的就是数据采集和处理部件。
由于磁浮列车的运行速度很高,普通单片机无法达到这样高的实时性要求。
因此采用以数字信号处理器为核心部件的数据采集和处理部件来完成工作。
1 硬件构成 该部件的原理图如图1所示。
该部件主要完成对测速传感器信号的放大、采样、处理并与其他部分进行通信。
硬件部分主要由信号采样单元、DSP 处理单元、外扩存储单元和逻辑控制单元等组成。
1.1 信号采样单元图1数据采集和处理部件的原理图 在一个数据采集单元中高速率和高精度的A/10 国 外 电 子 测 量 技 术第24卷D 转换器件直接影响着随后的数字处理结果的精度。
此处采用的ADS7864是一块高速度、低功耗、单电源工作的双12位A/D 转换器。
A/D 转换最短时间为1.75μs ,相应的采集时间为0.25μs ,对双通道信号采样的最高速率为500KHz 。
它的主要特点是:可实现6通道同步采样;高共模抑制比的差分输入方式;输出端有6个FIFO 寄存器;灵活的并行接口输出电路。
硬件电路设计主要包括电平转换电路、基准电路,以及并行接口电路。
图2为ADS7864的接口示意图。
在芯片的输入端,可以通过改变集成运算放大器的配置参数来改变输入信号的范围,使得输入信号范围为±2.5V 、±5V 或±10V ,使得部件能够满足不同场合的需要。
软件接口包括工作方式的配置、采样率的选定、采样数据的读取等部分。
在采样数据的读取时,首先在主程序中开相应的中断,并将中断子程序的地址给相应的中断向量。
当AD 转换结束时,会在引脚IN TRP T 产生一个中断信号,DSP 即开始响应外部中断,转而开始执行中断子程序。
图2ADS7864相关电路及接口示意图1.2 DSP 处理单元 在磁浮列车的测速装置中,精度要求较高,且要求装置的实时性要好,普通单片机无法满足需要,这就要求选择运算速度更快的处理器。
DSP 以其特有的改进型哈佛结构、指令系统的多级流水线操作、专用硬件乘法器、片内外两级存储结构和快速指令周期等特性适合构成精度高、可靠性强、集成度高的数字信号处理系统。
TMS320VC33芯片是美国TI 公司推出的一款性价比很高的32位浮点数字信号处理器,它能够满足实际需要。
它的指令周期为17ns ,单周期内可完成32位整数、40位浮点乘法运算,DSP 工作在60M Hz 主频时,运算能力达120M FLO PS ;片内34×32bit SRAM ,组成两个16K 和1个2K 的块;片上集成一个同步串口,两个32bit 的定时器,一个DMA 通道;总存储空间为16M ×32bit ,程序、数据和I/O 空间都包含在这16M 空间中,可以按照不同的要求采用不同的方法进行地址分配,从而可以达到最大的存储器利用率;具有程序引导装载功能,可以在系统复位后,方便地将程序数据从慢速的外部存储器中装载到快速的片内RAM 中运行。
在系统中,TMS320VC33芯片完成对AD 采样数据的处理,并通过一定的算法实现对磁浮列车运行速度和相对位置的计算。
并通过通信接口将处理后的数据送至其他部分使用。
1.3 外扩存储单元 由于DSP 芯片内部的存储空间有限,因此数字信号处理系统为实现相应的功能一般需要外接存储器,它可以是ROM 和RAM 。
ROM 往往用来存储系统程序和数据表格,而RAM 用来存储程序运行时的临时数据。
在系统中外扩了256K ×32位静态存储器用来存放DSP 的程序和数据。
采用两片IS61L V25616作为外扩SRAM ,接口示意图如图3所示。
它的地址被映射在存储空间中。
工作方式的选择由CPLD 来实现。
图3IS61LV25616接口示意图 另外DSP 系统应用板最终要脱离仿真器独立进行现场作业,这就需要断电后仍能可靠存储数据的Flash 作为系统的数据存储器。
系统板上电后,引导程序(Boot loader )把DSP 引用程序从Flash 加载到读写较快的SRAM 或DSP 内部RAM 进行工作。
程序烧入Flash 后,还要利用TMS320VC33的Boot loader 功能将程序直接调入存储器中运行。
2005年第10期陈德林等:磁浮列车测速定位装置11 芯片复位以后,将自动运行固化在0000h-0fff h空间内的引导装载程序。
进入引导装载程序以后,DSP将一直等待中断IN T02IN T3的中断状态。
根据不同的中断,决定是以BOO T1~BOO T3的存储空间装载程序到指定的快速闪存,还是以从串口将程序引导装载到指定的快速闪存。
采用这种加载程序的方式,比采用EPROM编程器编程速度更快,而且在需要修改时可在线编程修改。
1.4 逻辑控制单元 DSP的速度较快,要求译码的速度也必须快。
利用小规模逻辑器件译码的方式已不能满足DSP 系统的要求。
同时,DSP系统中经常需要外部快速部件的配合,这些部件往往是专门的电路,可由可编程器件实现。
CPLD的时序严格、速度较快、可编程性好,非常适合于实现译码和专门电路。
因此可以把DSP和CPLD结合起来使用,以构成功能强大的处理和控制板。
在部件中采用Xilinx的XC9572。
它是Xilinx XC9500系列CPLD家族中的一员。
Xilinx公司的CPLD器件被广泛应用在通信系统、网络、计算机系统及控制系统等电子系统中。
XC9500系列器件主要有以下特点: (1)高密度; (2)高性能; (3)在系统可编程; (4)快闪存储能力; (5)保密和抗干扰; (6)驱动负载能力强。
系统中CPLD的逻辑控制主要包括以下几个部分: (1)在部件中,AD转换器件的片选、触发、中断和时钟等都是通过CPLD译码产生的; (2)部件的外扩SRAM的片选和读写方式也是通过CPLD译码产生的; (3)部件的异步通信芯片的片选、中断以及内部寄存器的寻址都是通过CPLD译码来实现的;(4)由于每个芯片的电平不同,需要使用电平转换芯片来进行隔离,这些芯片的片选等都是通过CPLD来实现的; (5)作为一个比较完整的部件,部件上每个单元的地址空间分配都是通过CPLD来实现的。
2 软件设计 由传感器输入的原始速度信号,经AD采样后转化为数字信号后,需要经过数字滤波,并通过一定的算法计算后,才能得出所需要的信息。
图4是DSP的基本工作流程图。
图4DSP工作流程图3 通信接口及数据显示和处理3.1 通信接口 为了完成与其他部分的数据交换,采用TL16C550扩展一个异步串行通信端口,来完成数据的传输。
TL16C550的数据线D0~D7与DSP的数据线相连,用于数据的传输。
地址线A0~A2供DSP用来选择控制TL16C550的内部寄存器,它的片选信号为CS0、CS1、CS2。
当CS0、CS1为高电平,CS2为低电平时,芯片被选中。
CS2是由DSP通过接口电路译码后控制的。
TL16C550的读信号、写信号都可以选择高电平有效还是低电平有效。
读写电平由DSP经接口电路提供。
XIN、XOU T端外接 3.6864M Hz的晶振作为基准时钟频率。
TL16C550的中断请求信号直接连到DSP的外部中断输入端IN T2上。
SIN为串行数据输入端, SOU T为串行数据输出端。
这两根信号线接到MAX232芯片上,由MA X232实现串行数据的T TL/CMOS电平与232电平的转换。
TL16C550异步串行通信收发器的串口为标准RS232串行口。
它有11个寄存器,通过A2~A0和12 国 外 电 子 测 量 技 术第24卷线路控制寄存器中的DL AB位对它们进行寻址。
3.2 数据显示和处理 现在DSP的功能越来越强大,运算速度越来越快,数据处理能力也越来越强。
但是DSP也有其固有缺点,即缺乏友好的用户界面。