几个开环与闭环自动控制系统地例子
开环控制系统与闭环控制系统的区别及相关的实例
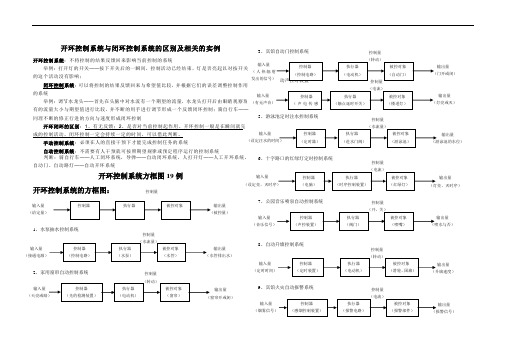
开环控制系统与闭环控制系统的区别及相关的实例开环控制系统:不将控制的结果反馈回来影响当前控制的系统举例:打开灯的开关——的这个活动没有影响; 闭环控制系统:可以将控制的结果反馈回来与希望值比较,的系统 举例:调节水龙头——有的流量大小与期望值进行比较,并不断的用手进行调节形成一个反馈闭环控制;骑自行车同理不断的修正行进的方向与速度形成闭环控制 自动控制系统:不需要有人干预就可按照期望规律或预定程序运行的控制系统 判断:骑自行车——人工闭环系统,导弹——自动闭环系统,人打开灯——人工开环系统,自动门、自动路灯——自动开环系统 开环控制系统方框图19例 开环控制系统的方框图: 1、水泵抽水控制系统 2、家用窗帘自动控制系统3、宾馆自动门控制系统 5、游泳池定时注水控制系统6、十字路口的红绿灯定时控制系统7、公园音乐喷泉自动控制系统8、自动升旗控制系统9、宾馆火灾自动报警系统 控制量控制量控制量控制量 控制量 控制量控制量 控制量 输入量 (定时时间) 控制量10、宾馆自动叫醒服务系统11、活动猴控制系统 12、公共汽车车门开关控制系统13、家用缝纫机缝纫速度控制系统14、普通电风扇控制系统15、普通全自动洗衣机控制系统16、手电筒控制装置 17、宾馆自动门加装压力传感器防意外事故自动控制系统 18、可调光台灯控制系统19、电吹风控制系统控制量 控制量(压缩空控制量控制量控制量 控制量 控制量控制量控制量闭环控制系统方框图12例闭环控制系统的方框图:1、投篮2、供水水箱的水位自动控制系统3、加热炉的温度自动控制系统4、抽水马桶的自动控制系统5、花房温度控制系统给定量被控量给定量被控量给定量被控量给定量被控量给定量给定量 被控量控制量6、夏天房间温度控制系统7、家用电饭锅保温控制系统8、家用电冰箱温度控制系统9、宾馆使用多台热水器串联电辅助加热自动控制系统10、粮库温、湿度自动控制系统11、自动电热水壶控制系统给定量被控量房内实被控量给定量 控制量被控量 冰箱实给定量 给定量被控量—80℃) 控制量被控量 粮库内给定量(设定控制量给定量控制量。
开环系统的例子及原理
开环系统的例子及原理
开环系统是一种物理或电气系统,其运作过程中没有反馈信号回路,而是通过输入信号来控制输出信号。
这种系统通常用于简单的控制任务,例如,灯泡的开关就是一个开环系统。
以下是一些开环系统的例子:
1. 简单的灯光控制系统:在室内,我们可以使用开关控制灯光。
当我们打开开关时,电流流过灯泡,将灯泡点亮。
这是一个开环系统,因为我们无法知道灯泡实际上是否真的点亮了。
如果灯泡损坏或电线断开,我们就无法得知,除非我们再次打开开关。
2. 自动售货机:自动售货机是另一个常见的开环系统例子。
当我们投入硬币时,自动售货机会释放物品。
然而,自动售货机并不会检查是否释放了正确的物品,或者是否有足够的物品供应。
这是一个开环系统,因为投入硬币并不能保证我们得到我们想要的物品。
开环系统的原理很简单:输入信号会直接影响输出信号,而不需要任何反馈机制。
这种系统通常很简单,但也因此容易出错。
如果输入信号有误或输出信号无法实现预期目标,就需要进行调整或修复。
因此,开环系统在复杂的控制任务中通常不太实用。
相比之下,闭环系统通过反馈机制来调整输出信号,因此更加精确和可靠。
- 1 -。
开环和闭环的简单举例
开环和闭环的简单举例
(1)开环
开环是许多系统结构中的一种常见形式,是指没有回路的结构。
一个常见的开环系统
是水温控制器,它通常可以分为三个部分:感温器、控制器和动力设备。
感温器会检测水
的温度,然后将温度信号发送给控制器,控制器会根据检测到的温度信号,来调节动力设备,使水的温度保持在正确的水平,而不存在回路。
另外,财务系统也是一种开环系统,
它没有明显的闭环结构,而是从发放资金过程中到支付和报告,后续过程不会影响前面过程,因此,财务系统也是一种开环系统。
(2)闭环
闭环是另一种常见的系统结构,也就是它的输出会反馈给它的输入,产生一个连续的
反馈回路,使输出变量维持在特定的水平,如果把闭环系统比作是一体,常犹指的目标就
是使系统安定,或者说是要保持一定的状态。
常见的一些闭环系统有温度控制、速度控制、湿度控制等等。
例如,酒店中空调自动温度控制系统就是一个闭环系统,感温器会检测房
间的温度,然后将温度信号发送给控制器,控制器会根据检测到的温度信号,来调节空调
的除湿调节,这个系统的输出会反馈回空调除湿调节,这就是闭环系统。
生活中开环控制和闭环控制的例子

生活中开环控制和闭环控制的例子
1. 咱就说,开车的时候,你设定好速度保持匀速行驶,这就是开环控制呀!就像你朝着目标一路前进,不管路上有啥变化,你就按设定好的来。
比如说你定了时速 60 公里,那车就一直保持这个速度,除非你自己去改变,这多直接!
2. 唉呀妈呀,你想想冬天家里的暖气,这就是个闭环控制啊!室内温度低了,暖气自动加热,温度够了就停,这不就是像个小精灵一样在那调节嘛,多贴心啊!
3. 嘿,你们晓得不,空调也是啊!你设定个温度,它就自动调节,这不是闭环控制是啥?就像是个忠诚的卫士,时刻为你保持舒适的温度呢!
4. 哇塞,那电饭煲煮饭也是呢!你按下煮饭键,它就自己工作,煮好就停,这就是开环控制呀!多方便呀,也不用你一直盯着。
5. 可不是嘛,自动灌溉系统也是典型的闭环控制呀!它根据土壤湿度来决定是否浇水,就像一个勤劳的园丁,精心呵护着植物呢!
6. 咱平时骑的电动车的速度控制,不也是开环控制吗?你拧动把手,车就跑多快,多简单易懂呀!
7. 哎呀呀,那烤箱的温度控制也是闭环控制哟!它能保持设定的温度,让你的蛋糕呀、面包呀烤得恰到好处,多厉害!
8. 你看啊,智能灯的亮度调节也是哦,根据环境光自动变亮或变暗,这简直就是个聪明的小助手呀!
9. 对啦对啦,还有自动门呢!人一走近就开,人走了就关,这也是一种开环控制呀!多神奇呀!
我觉得生活中有这么多开环控制和闭环控制的例子,真的让我们的生活变得更加便利和智能了呢!科技真的太伟大啦!。
开环控制系统和闭环控制系统的例子
开环控制系统和闭环控制系统的例子
1. 你知道家里面的那种普通电扇吗?它就是开环控制系统的例子呀!你打开开关,它就一直转,完全不管周围温度啥样,只知道傻乎乎地转,这多直接!
2. 哎呀,那些自动贩卖机不也是嘛!你投了币,选择了商品,它就按照设定好的程序给你出货,根本不会因为你的喜好改变而改变,这是典型的开环控制系统呀!
3. 咱再想想,公园里的那种定时喷泉,到点就喷,管它有没有人看呢,可不就是开环控制系统嘛,多么形象!
4. 像空调的温度控制系统就是闭环控制系统啦!它会感知室内温度,热了就制冷,冷了就制热,这多贴心啊,不停地调整来让你舒服!
5. 还有啊,你想想汽车的定速巡航,它能根据车速的实际情况去调整油门,让车保持在设定的速度,这可是闭环控制系统在发挥作用呢!
6. 你家里如果有那种智能扫地机器人,它在清扫的过程中会根据环境去改变路线,避免碰撞,这就是闭环控制系统呀,多厉害!
7. 血压计不也是嘛!它能实时测量你的血压,然后告诉你结果,这就是一个不断反馈和调整的过程,闭环控制系统就在为你的健康服务呢!
8. 很多工厂里的生产线上的自动控制系统也是闭环的呀!它会根据产品的质量情况去调整生产参数,这不就是在努力做到最好吗,就像人一样会自我改进!
9. 智能灌溉系统也挺神奇的哟!它可以根据土壤的湿度来决定要不要浇水,多智能呀,绝对是闭环控制系统的优秀代表呢!
我觉得开环控制系统和闭环控制系统都有各自厉害的地方,在我们生活中真的太重要啦!它们让我们的生活变得更加方便、高效和智能呢!。
生活中闭环控制的例子及其工作原理
生活中闭环控制的例子及其工作原理
闭环控制也称为反馈控制,在生活中有很多应用。
它通过测量系统输出并调节输入来达成预期效果。
下面介绍几个常见的闭环控制的例子及其工作原理。
1. 空调系统
空调系统是一个广泛应用闭环控制的例子。
当温度传感器测量室内温度高于设定温度时,系统会自动调节空调机组以降低室内温度。
当室温达到设定温度后,控制系统关闭空调机组,防止温度过低。
这个过程中,系统不断检测并调整空气质量,以确保室内空气清新舒适。
2. 水箱自动灌溉系统
在农业生产中,为了保证作物生长,常常需要用到水箱自动灌溉系统。
这个系统会通过土壤湿度传感器检测土壤水分,根据检测结果调节阀门控制水流的供应。
当土壤水分过低时,系统自动开启阀门供水,当土壤水分达到设定值时,系统自动关闭阀门以免过度浇水。
3. 火车轮轴压力监控系统
火车轮轴压力监控系统可以帮助保障列车行驶安全。
系统通过监测轮轴压力变化来检测轮轴摩擦等异常,确保列车运行平稳。
当轮轴压力异常时,系统会自动停车并报警以保证列车安全。
这些示例说明了闭环控制在自动调节、追踪目标、预警反应等方面的优势。
其原理基础是运用感知技术、信息反馈、逻辑判断以及动态调整等手段,自适应控制系统以实现优化控制。
其中分为开环控制和闭环控制,前者没有了解系统反馈的信息,只控制输入,后者则通过测量与系统连通的输出来调整输入,来达到预期效果。
因此,在生活和工业生产中,闭环控制是非常实用的方案。
它可以提高系统的稳定性和可靠性,减少人工干预和人为错误,提高效率,降低成本,提高生产能力,实现更好的节能效果。
日常生活中的开环和闭环控制系统的例子
日常生活中的开环和闭环控制系统的例子开环控制系统和闭环控制系统是控制工程中常用的两种控制方式。
开环控制系统是指输出不受控制系统内部状态的影响,而闭环控制系统是指输出受控制系统内部状态的影响。
下面将从日常生活中的例子来详细介绍这两种控制系统。
1. 音响控制系统:开环控制系统:当我们使用遥控器调节音响音量时,开环控制系统会根据我们的指令直接调节音响的音量,而不会考虑当前音量是否合适。
闭环控制系统:当我们使用有音量调节功能的耳机时,闭环控制系统会通过内置的传感器检测当前的音量,并根据我们的指令调整音量大小,使得输出音量达到我们期望的水平。
2. 温度调节器:开环控制系统:当我们使用普通的电风扇来调节室内温度时,开环控制系统会根据我们的指令调节风扇的风速,但无法感知室内温度是否达到我们期望的温度。
闭环控制系统:当我们使用具有温度传感器的空调来调节室内温度时,闭环控制系统会通过感知室内温度,并根据我们的指令调整制冷或制热模式,从而使得室内温度稳定在我们期望的范围内。
3. 洗衣机:开环控制系统:当我们使用普通的洗衣机洗衣服时,开环控制系统会按照我们的指令进行洗涤和漂洗等操作,但无法感知衣物的清洁程度。
闭环控制系统:当我们使用具有传感器的智能洗衣机时,闭环控制系统会通过感知洗涤水的浑浊度来判断衣物的清洁程度,并根据我们的指令调整洗涤和漂洗的次数,从而使得洗衣效果更好。
4. 自动灯控系统:开环控制系统:当我们手动控制灯的开关时,开环控制系统会根据我们的指令直接打开或关闭灯,而不会考虑当前环境的亮度。
闭环控制系统:当我们使用具有光敏传感器的自动灯控系统时,闭环控制系统会通过感知环境的亮度,并根据我们的指令调整灯的亮度,使得室内光照始终保持在一个合适的水平。
5. 汽车巡航控制系统:开环控制系统:当我们在高速公路上使用定速巡航功能时,开环控制系统会根据我们的指令维持车辆的恒定速度,而不会考虑前方交通情况。
闭环控制系统:当我们使用具有雷达传感器的自适应巡航控制系统时,闭环控制系统会通过感知前方车辆的距离和速度,并根据我们的指令调整车辆的速度,以保持与前车的安全距离。
自动控制原理概述及开闭环实例分析
自动控制原理概述及开闭环实例分析摘要本文简单介绍了自动控制的基本原理和发展概况,并从开环控制和闭环控制两方面对自动控制原理进行了详细介绍。
列举了开环控制和闭环控制的几个实例,结合实例分析了开环控制和闭环的优缺点,并对两种控制方式进行了对比。
关键词:自动控制、基本原理、开环、闭环1自动控制基本原理及发展概述所谓的自动控制,就是指在没有人直接参与的情况下,利用外加的设备(称为控制器)操作被控对象(如机器、设备或生产过程)的某个状态或参数(称为被控量),使其按预先设定的规律自动运行。
一般情况下自动控制理论的发展过程可以分为以下三个阶段:1.1经典控制理论时期时间为20世纪40-60年代,经典控制理论主要是解决单输入单输出问题,主要采用以传递函数、频率特性、根轨迹为基础的频域分析方法。
此阶段所研究的系统大多是线性定常系统,对非线性系统,分析时采用的相平面法一般不超过两个变量。
1.2现代控制理论时期时间为20世纪60-70年代,这个时期由于计算机的飞速发展,推动了空间技术的发展。
经典控制理论中的高阶常微分方程可以转化为一阶微分方程组,用以描述系统的动态过程,这种方法可以解决多输入多输出问题,系统既可以是线性的、定常的,也可以是非线性的、时变的。
1.3大系统理论、智能控制理论时期时间为20世纪70年代末至今,控制理论向着“大系统理论”和“智能控制”方向发展。
“大系统理论”是用控制和信息的观点,研究各种大系统的结构方案、总体设计中的分解方法和协调等问题的技术理论基础。
而“智能控制”是研究与模拟人类智能活动及其控制与信息传递过程的规律,研究具有某些仿人智能的工程控制与信息处理系统。
2自动控制系统分类按照控制方式和策略,系统可分为开环控制系统和闭环控制系统。
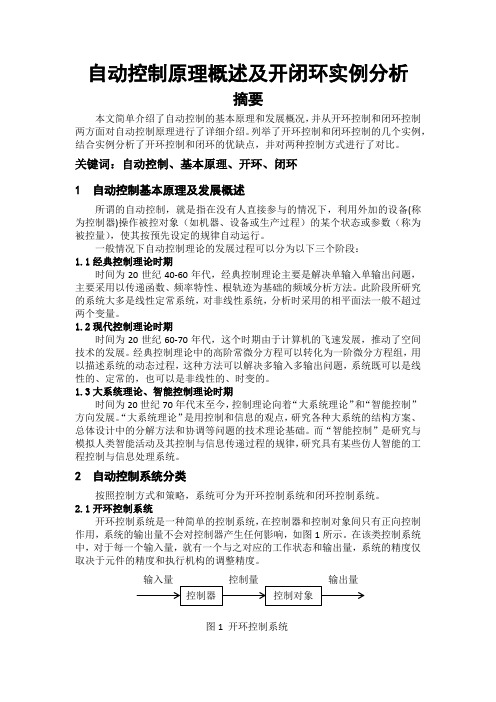
2.1开环控制系统开环控制系统是一种简单的控制系统,在控制器和控制对象间只有正向控制作用,系统的输出量不会对控制器产生任何影响,如图1所示。
在该类控制系统中,对于每一个输入量,就有一个与之对应的工作状态和输出量,系统的精度仅取决于元件的精度和执行机构的调整精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2-1 试求出图P2-1中各电路的传递函数。
图P2-12-2 试求出图P2-2中各有源网络的传递函数。
图P2-22-3 求图P2-3所示各机械运动系统的传递函数。
(1)求图(a )的 ()()?=s X s X r c (2)求图(b )的()()?=s X s X r c (3)求图(c )的()()?12=s X s X (4)求图(d )的 ()()?1=s F s X图P2-32-4 图P2-4所示为一齿轮传动机构。
设此机构无间隙、无变形,求折算到传动轴上的等效转动惯量、等效粘性摩擦系数和()()()s M s s W 2θ=。
图P2-4 图P2-52-5 图P2-5所示为一磁场控制的直流电动机。
设工作时电枢电流不变,控制电压加在励磁绕组上,输出为电机角位移,求传递函数()()()s u s s W r θ=。
2-6 图P2-6所示为一用作放大器的直流发电机,原电机以恒定转速运行。
试确定传递函数()()()s W s U s U r c =,设不计发电机的电枢电感和电阻。
图P2-62-7 已知一系统由如下方程组组成,试绘制系统方框图,并求出闭环传递函数。
()()()()()()[]()s X s W s W s W s W s X s X c r 87111--=()()()()()[]s X s W s X s W s X 36122-= ()()()()[]()s W s W s X s X s X c 3523-= ()()()s X s W s X c 34=2-8 试分别化简图P2-7和图P2-8所示的结构图,并求出相应的传递函数。
图P2-7 图P2-82-9 求如图P2-9所示系统的传递函数()()()s X s X s W r c =1,()()()s X s X s W N c =2。
图P2-92-10 求如图P2-10所示系统的传递函数。
图P2-102-11 求图P2-11所示系统的闭环传递函数。
图P2-11 图P2-122-13 画出图P2-13所示结构图的信号流图,用梅逊公式求传递函数:()()()s X s X s W r c =1,()()()s N s X s W c =2。
图P2-132-14 画出图P2-14所示系统的信号流图,并分别求出两个系统的传递函数()()s X s X r c 11,()()s X s X r c 22。
图P2-143-1 一单位反馈控制系统的开环传递函数为()()11+=s s s W K 。
求:(1)系统的单位阶跃响应及动态特性指标δ%、t r 、t S 、μ; (2)输入量x r (t )=t 时,系统的输出响应;(2)输入量x r (t )为单位脉冲函数时,系统的输出响应。
3-2 一单位反馈控制系统的开环传递函数为()()1+=s s K s W kK τ,其单位阶跃响应曲线如图P3-1所示,图中的X m =1.25,t m =1.5s 。
试确定系统参数K k 及 τ 值。
图P3-13-3 一单位反馈控制系统的开环传递函数为()()n nK s s s W ξωω22+=。
已知系统的x r (t )=1(t ),误差时间函数为()t t e e t e 73.37.14.04.1---=,求系统的阻尼比ξ、自然振荡角频率n ω、系统的开环传递函数和闭环传递函数、系统的稳态误差。
3-4 已知单位反馈控制系统的开环传递函数为()()1+=s s K s W kK τ,试选择K k 及τ值以满足下列指标。
当x r (t )=t 时,系统的稳态误差e (∞)≤0.02; 当x r (t )=1(t )时,系统的δ%≤30%,t S (5%)≤0.3s 。
3-5 已知单位反馈控制系统的闭环传递函数为()2222nn nB s s s W ωξωω++=,试画出以n ω为常数、ξ为变数时,系统特征方程式的根在s 复平面上的分布轨迹。
3-6 一系统的动态结构图如图P3-2所示,求在不同的K k 值下(例如,K k =1、K k =3、K k =7)系统的闭环极点、单位阶跃响应、动态指标及稳态误差。
图P3-23-7 一闭环反馈控制系统的动态结构图如图P3-3所示。
(1)求当δ%≤20%、t S (5%)=1.8s 时,系统的参数K 1及τ值。
(2)求上述系统的位置误差系数K p 、速度误差系数K v 、加速度误差系数K a 及其相应的稳态误差。
图P3-33-8 一系统的动态结构图如图P3-4所示。
求 (1)1.0,021==ττ时,系统的%δ、%)5(s t(2)0,1.021==ττ时,系统的%δ、%)5(s t(3)比较上述两种校正情况下的暂态性能指标及稳态性能。
图P3-43-9 如图P3-5所示系统,图中的()s W g 为调节对象的传递函数,()s W c 为调节器的传递函数。
如果调节对象为()()()1121++=s T s T K s W gg ,T 1 > T 2 ,系统要求的指标为:位置稳态误差为零,调节时间最短,超调量%δ≤4.3 %,问下述三种调节器中哪一种能满足上述指标?其参数应具备什么条件?三种调节器为 (a )()p c K s W =; (b) ()()ss K s W p c 1+=τ; (c) ()()()1121++=s s K s W pc ττ。
图P3-53-10 有闭环系统的特征方程式如下,试用劳斯判椐判断系统的稳定性,并说明特征根在复平面上的分布。
(1)05042023=+++s s s (2)010042023=+++s s s (3)08862234=++++s s s s (4)0722********=-++-+s s s s s (5)0121222189323456=++++++s s s s s s 3-11 单位反馈系统的开环传递函数为()()()()15.0115.02++++=s s s s s K s W k k试确定使系统稳定的K k 值范围。
3-12 已知系统的结构图如图P3-6所示,试用劳斯判椐确定使系统稳定的K f 值范围。
图P3-63-13 如果采用图P3-7所示系统,问τ取何值时,系统方能稳定? 3-14 设单位反馈系统的开环传递函数为()()()s s s Ks W k 167.0133.01++=,要求闭环特征根的实部均小于–1,求K 值应取的范围。
图P3-73-15 设有一单位反馈系统,如果其开环传递函数为 (1)()()()15410++=s s s s W k(2)()()()()1541.0102+++=s s s s s W k求输入量为()t t x r =和()2542t t t x r ++=时系统的稳态误差。
3-16有一单位反馈系统,系统的开环传递函数为()sK s W k k =。
求当输入量为()221t t x r =和()t t x r ωsin =时,控制系统的稳态误差。
3-17有一单位反馈系统,其开环传递函数为()()15103-+=s s s s W k ,求系统的动态误差系数;并求当输入量为()2211t t t x r ++=时,稳态误差的时间函数()t e s 。
3-18 一系统的结构图如图P3-8所示,并设 ()()s s T K s W 1111+=,()()s T s K s W 2221+=。
当扰动量分别以()s s N 1=∆、21s作用于系统时,求系统的扰动稳态误差。
图P3-83-19 一复合控制系统的结构图如图P3-9所示,其中1231==K K ,T 2=0.25s ,K 2=2。
(1)求输入量分别为()1=t x r ,()t t x r =,()221t t x r =时,系统的稳态误差; (2)求系统的单位阶跃响应,及其%δ,s t 值。
图P3-9 图P3-103-20 一复合控制系统如图P3-10所示,图中()bs as s W c +=2,()()()s s s s W g 2.011.0110++=。
如果系统由1型提高为3型系统,求a 值及b 值。
4-1 求下列各开环传递函数所对应的负反馈系统的根轨迹。
(1))2)(1()3()(+++=s s s K s W g K(2))2)(3()5()(+++=s s s s K s W g K(3))10)(5)(1()3()(++++=s s s s K s W g K4-2 求下列各开环传递函数所对应的负反馈系统的根轨迹。
(1)32)2()(2+++=s s s K s W g K(2))22)(2()(2+++=s s s s K s W gK(3))22)(3()2()(2++++=s s s s s K s W g K(4))164)(1()1()(2++-+=s s s s s K s W g K(5)2)125.0)(1()11.0()(+++=s s s s K s W g K4-3 已知单位负反馈系统的开环传递函数为)22)(1()(2+++=s s Ts s Ks W K 求当4=K 时,以T 为参变量的根轨迹。
4-4 已知单位负反馈系统的开环传递函数为)1()()(2++=s s a s K s W K求当41=K 时,以a 为参变量的根轨迹。
4-5 已知单位负反馈系统的开环传递函数为)22)(16()(2+++=s s s K s W gK试用根轨迹法确定使闭环主导极点的阻尼比5.0=ξ和自然角频率2=n ω时g K 值。
4-6 已知单位正反馈系统的开环传递函数为2)4)(1)(1()(+-+=s s s K s W gK试绘制其根轨迹。
4-7 设系统开环传递函数为)4)(2()1()(2+++=s s s s K s W g K试绘制系统在负反馈与正反馈两种情况下的根轨迹。
4-8 设单位负反馈系统的开环传递函数为)11.0()1()(2++=s s s K s W K如果要求系统的一对共轭主导根的阻尼系数为0.75,用根轨迹法确定 (1) 串联相位迟后环节,设15=a k 。
(2) 串联相位引前环节,设15=a k 。
4-9 已知单位负反馈系统的开环传递函数为)20)(4()(++=s s s K s W gK设要求)/1(12s k v ≥、%25%≤δ、s t s 7.0≤,试确定串联引前校正装置的传递函数,并绘制校正前、后的系统根轨迹。
4-10 设单位负反馈系统的开环传递函数为)5)(4()(++=s s s K s W gK要求校正后)/1(30s k v ≥、主导极点阻尼比707.0=ξ,试求串联迟后校正装置的传递函数。