TMS320LF2407A的CAN控制器模块及其CAN通信设计
TMS320LF2407ADSP心电监护系统设计方案(精)
TMS320LF2407A DSP心电监护系统设计方案引言随着社会的发展和人们生活水平的提高,人们对健康的重视程度日益增加,但是伴随着生活水平的提高心血管疾病的发病率不断攀升。
特别是近年来随着社会老龄化的加剧,心血管疾病成了威胁人类生命的主要疾病,心脏病成了世界上死亡率最高的疾病。
鉴于心血管疾病患者日益增多的严峻形势,提高预防和监测该疾病的手段势在必行。
而心电信号检测是发现心脏病的最直接手段,但目前医院用的心电监护仪几乎全部是进口的,价格昂贵,维护费用高,加重了医院和患者的经济负担;因此设计一种便携、经济的心电监护设备具有重要意义。
本文设计了一种基于TI公司TMS320LF2407A DSP的心电监护系统,此系统体积小、成本低、实用性强。
TMS320LF2407A DSP介绍心电监护系统很重要的一部分就是对心电信号进行处理,因此选一款合适的信号处理器十分重要。
当前最成功的DSP芯片当数美国TI公司的系列产品,其主推的三大DSP平台TMS320C2000、TMS320C5000、TMS320C6000已经成为当今世界上最有影响力的DSP芯片。
本系统采用TMS320LF2407A为信号处理器和核心控制器。
TMS320LF2407A是TI公司推出的新型高性能16位定点数字信号处理器,是 TMS320C2000系列的新成员。
它专门为数字控制设计,集DSP的高速信号处理能力及适用于控制的优化外围电路于一体,是真正的单芯片控制器,在数字控制系统中得到了广泛应用。
TMS320LF2407A DSP具备以下一些特点:(1)采用高性能静态CMOS技术,使得供电电压降为3.3V,降低了控制器的功耗; 40MIPS的执行速度使得指令周期缩短到25ns,从而提高了控制器的实时控制能力。
2)基于TMS320C2xx DSP的CPU内核,保证了TMS320LF2407A DSP代码和TMS320系列DSP代码兼容。
(3)片内有高达32KB的FLASH程序存储器,高达1.5KB的数据/程序RAM ,544字双口RAM(DARAM)和2KB的单口RAM(SARAM) 。
基于TMS320LF2407的智能断路器的CAN通信设计
1.引言短路器是一种量大面广的重要的低压配电电器,其作用是分配电能和保护电器配电网络和工业设备免受短路、过载、欠电压和接地故障电流的破坏。
随着计算机技术、微电子技术、数字处理技术的发展,断路器逐渐趋向自动化、智能化、模块化、小型化。
为了使供电系统中的多台智能型断路器实现联网通信、集中监控,开发适应多种现场总线的科通信低压电器已经成为一个重要的发展趋势。
目前,我国也正致力于开发国产第四代断路器——智能化、可通信断路器,其主要特征是在智能化的基础上具备现场总线的可通信特点。
DSP(Digital Signal Processors)是一种独特的微处理器,是以数字信号来处理大量信息的器件。
其工作原理是接收模拟信号,转换为0或1的数字信号,再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式。
它不仅具有可编程性,而且其实时运行速度可达每秒数以千万条复杂指令程序,远远超过通用微处理器,是数字化电子世界中日益重要的电脑芯片。
它的强大数据处理能力和高运行速度,是最值得称道的两大特色。
本文介绍基于TMS320LF2407DSP的智能断路器的CAN通信设计,可实现远距离遥控、遥调、遥测、遥讯等“四遥”功能,并能显示、记忆、监控。
TMS320C2XX是继TMS320C2X和TMS320C5X之后出现的一种低价格、高性能定点DSP芯片,主要包括TMS320C20X、TMS320C24X两个子系列。
而DSPTMS320LF240x是TMS320C2000家族中相对较新的,功能强大的芯片。
2.硬件的总体结构、工作原理及CAN总线的作用2.1 智能断路器的结构与原理智能断路器的原理如下:电流传感器采集三相电流和地线电流,送入信号调理电路进行滤波、放大,输出两路信号。
一路送往DSP的A/D接口,微处理器对信号进行数字转换、计算和判断;另一路送往模拟脱扣检测电路,当发生严重短路情况时,将直接驱动脱扣电路跳闸。
TMS320LF2407系统设计及外扩CAN总线设计(1)
Abstract This paper introduced the hardware design methods of the minimal system about TMS320LF2407, which was the fixed- point DSP chip, according to its structure ( Introducing the relative circuits about Timing, Reset, JTAG Emulation and Memory Interfacing and Voltage Transit ion) . It also particularly introduced the design of expansion inter facing circuit for CAN Bus, in terms of practical application. Key Words Chip Digital signal processor Minimal system Controller area network Expansion design
基于TMS320LF2407与CAN总线通信的汇编实现
e a l o TMS 2 L 2 0whc s P po ue yTI o a ya dC o t l r J 1 0 . t d csh w t mpe n C x — x mpe f 30 F4 ihi DS r d c d b mp n n A c nr l S A 0 0 i r u e o oi l c N oe no me t 2 xa s smby l 1u g  ̄ e l l a ep ag aa g佃 i t l et e J O 0 n bema k beitr pso MS 2 L 2 0 ,ac p h aao A u y rn r n i i AI 0 ,e a l s a l ner t f iaz h S u T 3 0 F 4 7 ce t ed t f N b b t C s
பைடு நூலகம்
itru t swela e d aat t e eih rl yq eis n er ps。a l ssn dt ooh rp rp easb u re . Ke d DS CAN u ;se l a ywors: P; b asmbyl s
O 引 言 C N总线是一种开放式 、 A 数字化 、 多点通信 的控制系 统局域网络… , 在当今 自动化领域中是最具有应 用前景的
技术之 一 , 传输 时 间短 、 具有 距离 远 、 抗干 扰 、 制 简单 、 控 扩 展能 力强 、 性价 比高 等特 点 。 C N 总线 控制 器 与德 州 仪 器 T 公 司生 产 的数 字 信 A I
TMS320LF2407 DSP控制器的串行通信设计
TMS320LF2407 DSP 控制器的串行通信设计一引言TI 公司的TMS320LF2407 型DSP 微控制器内嵌的异步串行口(SCI)支持CPU 与其它使用标准格式的异步外设之间的数字通讯,通过RS-232 接口可以方便地进行DSP 之间或与PC 机之间的异步通信。
而串行外设接口(SPI)是一个高速同步串行输入/输出(I/O)端口,常用于DSP 控制器和外部器件或其它控制器间的通讯。
本设计正是通过TMS320LF2407 所带有的SCI 模块进行两台DSP 的数据传输通信。
同时还利用了DSP2407 的SPI 模块和I/O 口作了显示以及键盘扩展电路,以便能实时监控数据的收发。
此实例电路结构简单易懂,非常适合刚接触DSP 的初学者使用,具有很好的参考价值。
二硬件原理设计此设计主要包含两大模块:一是DSP 之间的串行通讯模块:二是DSP 与显示器及键盘的串行显示接口模块。
以下分别详细介绍每一模块的硬件原理及软件设计。
2.1SPI 外设显示接口模块:SPI 是一个高速同步串行输入/输出端口,它允许一个具有可编程串行外设接口长度(1 到16 位)的串行位流,以可编程的位传送速率从设备移入或移出。
本设计利用SPI 口外接4 片74LS164 作为4 位LED 显示器的静态显示接口,把LF2407 的SPISIMO 引脚作为数据输出线,SPICLK 引脚作为移位时钟脉冲。
74LS164 为TTL 单向8 位移位寄存器,可实现串行输入,并行输出。
其中A,B(第1、2 脚)为串行数据输入端,两个引脚按逻辑与运算规律输入信号,用同一个输入信号时可并接。
CLK(第8 脚)为时钟输入端,可连接到串行口的SPICLK 端。
2.2串行通讯接口(SCI)模块:。
DSP—TMS320LF2407的CAN总线扩展设计
嚣- - 一 ■ _ =
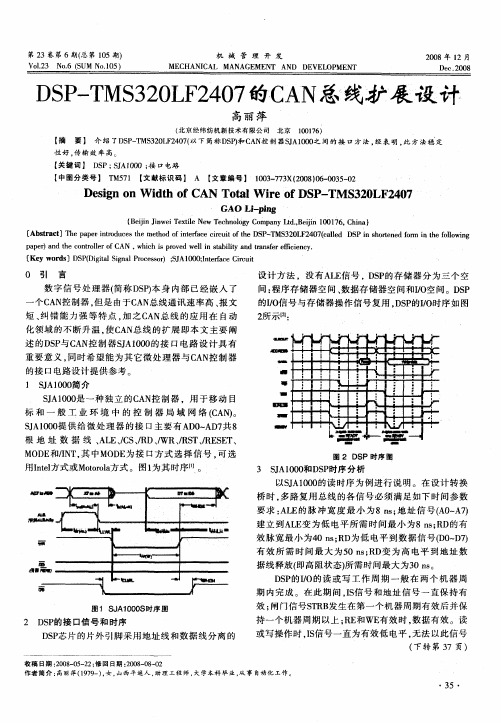
图 2 DSP 时 序 图
MO E和/ T, 中MO E 接 口方 式 选 择 信 号 . 选 D I 其 N D 为 可 用Itl 式或 Mo rl方 式 。图 l ne方 tBiblioteka o a 为其 时序 【 。 1 】
3 sA1 0 和D P J 00 S 时序 分析
数字 信 号 处 理 器( 称 D P 本 身 内部 已经 嵌 入 了 简 S)
一
个C 控 制器 , AN 但是 由于C N总线 通讯 速 率高 、 文 A 报
l —Il — l l — l
短 、 错 能 力 强 等特 点 , 之 C 纠 加 AN总线 的应 用 在 自动 化领 域 的不 断 升 温 , A 总 线 的 扩 展 即本 文 主要 阐 使C N
tt lt t
一
■ …
一
建 立 到A E 为 低 电 平所 需 时 间 最 小 为8n : D的有 L变 sR
]
效 脉 宽最 小 为4 sR 0 n ; D为 低 电平 到 数 据 信 号( O D ) D — 7
有 效 所 需 时 间最 大 为5 sRD 为 高 电平 到 地址 数 0n ; 变 据线 释 放f 即高 阻状 态) 需时 间最 大为 3 S 所 Ot 。 l
以SA10 的读 时序 为 例进 行 说 明 。在 设 计 转换 J 00
k一
U■- J
_
, ’啦— __ 一
■ _ _ __ 一 ■_ - _ _
r
桥 时 。 路 复 用 总线 的 各信 号 必 须 满足 如 下 时 间参 数 多
要 求 :L A E的脉 冲 宽 度 最 小 为8n ; 址 信 号 f0 A ) s地 A~7
DSP课程设计TMS320LF2407A最小系统设计

一、设计要求要求设计的最小系统包括TMS320LF2407A基本电路、电源电路、扩展RAM、指示灯等部分,需要用protel软件完成原理图和PCB的设计,并编写验证程序,在实验箱上进行调试。
二、设计原理及框图对于DSP2407,加上电源、复位和晶振,就构成了DSP最小系统。
为使这一最小系统能工作在开发状态下,应配以锁相环、JTAG接口、扩展片外程序存储器、FLASH烧写、指示灯、引脚扩展以及对其他引脚的处理等电路。
DSP2407最小系统框图如下图所示:三、主要芯片说明3.1 TMS320LF2407ATMS320LF2407A的常用资源见下表:3.2 TPS7333QTPS7333Q是TI公司生产的一款电压转换芯片,能将5V电压转换成3.3V,其特点如下:1.TPS7333Q克服了常规LDO稳压器的弊端,它具有非常低的静态电流,即使对于变化较大的负载,静态电流可以保持稳定2.具有关断特性3.具有输入和输出电容的选择3.3 CY7C1021选用的RAM型号为CY7C1021,64k*16位大小。
其高速转换时间:8、10、12、15ns,CMOS低功耗管理,TTL可共存界面,由3.3V供电,完全静态管理:无时钟或刷新要求,三种输出状态,高位、低位数据控制3.4 MAX811MAX811是一款四管脚微处理器复位芯片,用于监控微控制器和其他逻辑系统的电源电压,带有手动复位输入低电平复位芯片,支持手动复位功能,当MR引脚持续存在180ms的低电平,芯片的复位输出即会产生复位信号。
3.5 74HC0874HC08是4-2输入与门,相当于四个两输入与门。
其逻辑图如下:引脚图为四、设计过程4.1 电源电路电源电路的选择是系统设计的一个重要的部分,设计好坏对系统的影响最大。
这里使用TI公司的TPS7333Q来设计电源供电电路。
电源插孔J1 标识为内正外负,5V 稳压直流电源输入。
FUSE 为自恢复保险;7333 电源转换芯片作为5V 转3.3V 的高性能稳压芯片。
内嵌CAN控制器的TMS320LF2407的CAN通信实例
GND
RS RXD CANH GND CANL VCC VREF RXD 三 P CA8 C2 o r 2 5 ]
d ly 5 0 ; ea (0 )
l 0Q 2
TM ¥ 2 LF2 o 3O 47
CAN
v i a odc n
_
ii) nt (
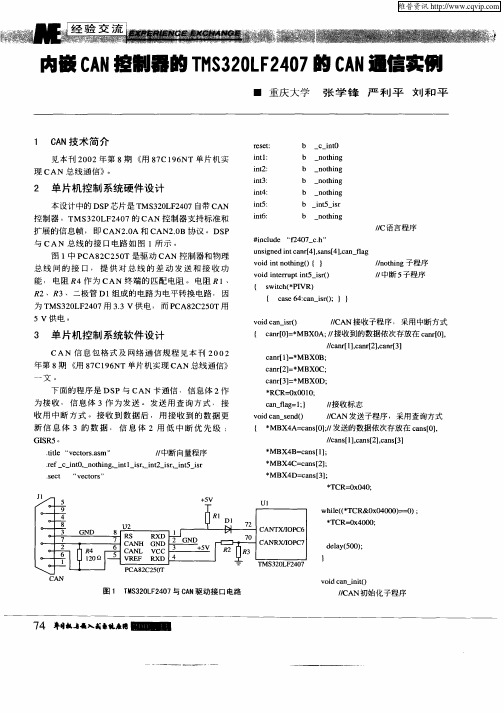
图 1 TS 2L2 0 M 3 0 F 4 7与 C N 动 接 口 电路 A驱
/ N初始 化子程序 / CA
7 丰 -鼻l 冬 ^一_ _ 4 瞎 .| .入式 q 田_
维普资讯
{
AN引脚 I C OP 6、 MCRB= MCRB1x 0; /配 置 C 0c / /O C / P 7为特殊功能 引脚 I
M D ER=0x 00; CA N I FR=0xFFFF;
一
s ct e
“ ve t r ” co s
J l
+5 V
尺l
I1 J
whl( TCR&0 0 0 0 = 0 ; i ( e x 4 0 ) = )
D 7 2
U2
* TCR- x 0 0 - 40 ; 0
CANTX/OP I C6 CANRX/ OP I C7
GI R5。 S
.
l =1} fg ; a
—
/ / 接收标志
v i a odc n
sn ( ed)
/A / N发送 子程序 ,采用查询 方式 C
/c n [] a s2 ,a s3 /a s1,n [] n [】 c c
{ MB 4 cn []/ X A= a s0; 发送 的数据依次存 放在 cn [] / as , 0
MBX4 B=c n 【】 a s 1; M BX4 C=c n [] a s2 ; M BX4 c n [] D= a s 3 ;
基于TMS320LF2407A的CAN总线数据采集系统
基于TMS320LF2407A的CAN总线数据采集系统刘海波;王红艳;李爱宁;何洪【摘要】以TM320为核心设计了CAN总线数据采集系统,该系统利用CAN总线的特点和性能优势,结合数据采集系统的现状,给出了数据采集系统的总体结构设计,通过CAN总线将每一个独立的数据节点连接起来,实时采集数据传送到以TM320为核心的上位机进行处理;监测节点以STC89C58RD+作为微处理器,SJA1000作为CAN总线控制器,82C250作为CAN总线收发器并通过CAN控制器MCP2510与上位机通信.该系统稳定可靠,并具有很好的扩展性,能够很好地满足多种控制系统数据采集的需要,自动化程度大大提高.【期刊名称】《仪表技术与传感器》【年(卷),期】2014(000)001【总页数】3页(P100-102)【关键词】CAN总线;TM320;数据采集【作者】刘海波;王红艳;李爱宁;何洪【作者单位】河北工程技术高等专科学校,河北沧州061001;河北工程技术高等专科学校,河北沧州061001;河北工程技术高等专科学校,河北沧州061001;河北工程技术高等专科学校,河北沧州061001【正文语种】中文【中图分类】TP2120 引言随着数字化、信息化时代的到来,现场总线技术已经广泛地应用于工业控制中,涉及行业和领域非常广泛,其中汽车制造、化工生产、钢铁制造、煤矿生产、智能建筑等应用广泛,而且尤其以CAN总线在这些行业应用中的份额较大。
其主要原因就是由于CAN总线具有可靠性高、成本低、容易实现等优点,而且其传输速率高、抗电磁干扰能力强,当传输距离达到10 km时传输速度仍可达到5kbps[1]。
在CAN总线的各种应用系统中,都有大量的现场参数需要测量,从而实现对整个系统的控制和监测。
对现场参数测量来说数量大、测量点分散、测量精度要求也高,如何运用先进技术实现多参数智能测控值得我们去研究。
文中以TM320为核心,设计了CAN总线智能数据采集系统,实现将多种被测参数集中进行测量、处理、显示和记录,并与控制系统相连实现自动控制和调节。
基于DSP器件TMS320F2407和CAN总线实现微机保护测控装置的应用方案
基于DSP器件TMS320F2407和CAN总线实现微机保护测控装置的应用方案1引言目前,国内外的各种中低压变电站综合自动化系统产品,其系统结构都趋向于采用完全分布式,这种结构基于面向对象的思想,以变压器、断路器等设备间隔为对象,将各种保护测控功能综合在一个测控装置中,下放到现场测控对象(即设备)上安装。
因此整个系统中,关键是要设计集保护、测量、控制、通信等功能于一体的微机保护测控装置。
本文设计了一种基于TI公司的嵌入式数字信号处理器TMS320F2407的分布式微机保护测控装置,该装置就地采集电压、电流等信息量,实时完成保护、测量、控制等功能,具有抗干扰性强、高的特点。
基于DSP器件TMS320F2407和CAN总线实现微机保护测控装置的应用方案2装置整体设计一个变电站综合自动化系统中,测控装置的种类好多种,如线路、变压器、电容器等的测控装置。
因此测控装置采用标准机箱,硬件结构统一,彼此间完全通用,实现硬件的标准化、模块化,不但有利于组织规模化流水线生产,提高生产效率,同时又为调试、维护提供了很大的方便,还做到不同装置间的同一种插件可以完全互换,减少备件。
3DSP系统3.1DSP系统结构DSP系统是整个装置的部分,主要由模拟输入电路、DSP及其外围电路、开关量输入回路、开关量输出回路组成。
3.2DSP微处理选择微机保护测控装置是一个专用实时测量与控制系统,但他对微处理器速度的要求并不是越快越好。
因为保护的动作必须要在故障后一段时间内进行一定采样次数的数据采集,根据这些数据进行计算后,才能决定是否保护动作。
由于保护算法本身的要求,这个采样时间一般在几个毫秒以上,也就是说这个时间是不能靠采用高速微处理器来缩短的。
因此,在微处理器速度满足需要的前提下,尽可能选择功能全面的微处理器芯片。
TI公司的嵌入式工业级数字处理器TMS320F2407,主频40MHz,集程序存储器、数据存储器、CAN通信控制器于一体,非常适合于分散式装置,使装置的体积大大减小,抗干扰性能大大提高,可长期工作在-45~+80℃的环境。
TMS320LF2407系统设计及外扩CAN总线设计
控 制 器局 域 网 扩展 设计
Ha d r m p sto o ii a y tm n r wa e Co o iin fM nm lS se a d CAN s Bu
Ex a s n De in Ba e n T S 2 LF 4 7 p n i sg s d o M 3 0 2 0 o
能、 低功耗等优 良性能 , 受到了用户的极大欢迎。T S2L20( M 30F47以下简称 : 20 ) I 47具有 T S2I'0 系列 _  ̄ M 30 2 x Y4 的结构和 功能 , 1 位 定点 的、 其 6 处理速度 为 3 0 条 指令/ ×17 s的 DP内核为模 拟系统 的设 计者提供 了一个不 S
( 北京空间机电研究所 , 北京 10 7) 006
摘 要 文章针对定点数字信号处理器 ( it i a Poe o, S ) Dga S n r s r D P 芯片 T S2L20 的结构特点, il g l c s M 30F47
介绍 了该芯 片最 小 系统 电路 的设 计方 法 , 包括 时钟 电路 、 复位 电路 、 合测 试 行动 组 (0 t et co r p 联 Ji s A tnG o . nT i u
牺牲系统 精度和性 能 的数 字解决方 案 , 过把一个 高性能 的 D P内核 和微 处理 器 的片 内外设 集成 为一个芯 通 S 片的方案 , 使得它 成为传 统 的微控 制单元 ( C ) 昂贵 的 多片设计 的一种 廉 价 的替 代产 品 。本 文基 于作者 M U和
的实际 电路设计 经验 , 绍 了基于 L 20 介 F 4 7最小 系统 的硬件 组成 , 以及外 扩控 制器局 域 网( ot lr r e C n o e Ae N t rl a .
TMS320LF2407A在混合电压中的设计
TMS320LF2407A在混合电压中的设计随着便携式数字产品、数字式移动电话、手持式测试仪表等的快速进展,要求用法体积小、功耗低、电池耗电小的器件,从而使得的工作已经从5V降到3.3V甚至更低,例如2.5V和1.8V。
但是目前仍有许多5V 电源的规律器件和数字器件可用,因此在许多设计中将会有3.3V规律器件和5V规律器件共存,而且不同的电源电压在同一板中混用。
随着更低电压标准的引进,混合电压的系统将会代替单电压系统,并会在很长时光内存在。
1 TMS320LF2407A概述TMS320LF2407A是TI公司推出的一款定点控制器,它采纳了高性能静态技术,使得供电电压降为3.3V,减小了控制器的功耗;40的执行速度使得命令周期缩短到25ns(40MHz),从而提高了控制器的实时控制能力;集成了32K字的闪存(可加密)、2.5K的RAM、500ns转换时光的A /D转换器,片上大事管理器提供了可以满足各种电机的接口和I/O 功能,此外还提供了适用于工业控制领域的一些特别功能,如电路、SPI、SCI和CAN控制器等,从而使它可广泛应用于工业控制领域。
然而,在实际的应用系统中,还需要对TMS320LF2407A举行须要的外围扩展,譬如程序区和数据区的扩展、CAN的驱动等,以满足囫囵应用系统的实际需要。
2 电源设计TMS320LF2407A的工作电压是3.3V,而目前许多常用外围器件的主要工作电源通常是5V,因此以TMS320LF2407A为核心所构成的应用系统必定是一个混合电压系统。
与彻低的3.3V系统相比较,混合电压系统因为低电压器件的缺乏,明显有不少缺点。
其中一个主要缺点就是对多电源的要求,一个典型的系统需要3V、5V、+12V/-12V,甚至更高的电压。
设计的一个目标就是削减所需电源的数目,并削减产生这些电源电压所需器件的数目。
为了削减多电源所需的额外器件的数目,不少厂家提供了产生多种电压的芯片。
基于TMS320 LF2407A在CAN总线上的应用研究
基于TMS320LF2407A在CAN总线上的应用研究介绍了以DSP(TMS320F2407A)和收发器SN65HVD230D为主体所构成的控制模块在CAN总线上的应用。
详细分析了实时操作系统uC/OS-II在DSP中的移植,从而提高系统的实时性和软件的运行效率。
标签:CAN总线;TMS320F2407A;接口技术;uC/OS-II,嵌入式操作系统1 引言CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。
CAN是一种多种方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出任何错误。
由于CAN总线具有很高的实时性能,因此,CAN已经在汽车工业、航空工业、工业控制、安全防护等领域中得到了广泛应用。
TMS320LF2407A是美国TI公司生产的一种定点DSP芯片,它采用增强的C2xx CPU内核结构,代码与24x系列的芯片兼容。
与24X系列的DSP芯片相比,TMS320LF2407A采用3.3 V电源供电,功耗更低;CPU时钟频率可达40MHz,速度更快,EVM板可对LF2407代码进行全速检查,其中有544个字长的片上数据存储器、128K字长的板上存储器、片上只读闪烁存储器,片上UART和一个MP7680/A转换器, 可分别寻址程序存储器、数据存储器以及I/O各64位空间和两个事件管理模块EV A和EVB,各有两个16位的通用定时器。
板上安装的器件可使评估板解决各类问题,4个扩展接口,可提供任何评估电路。
TMS320LF2407A 中含有一个支持CAN 2.0B协议的CAN控制器,支持标准和扩展标识衬;支持两种信息帧格式,即数据帧和远程帧,可以自动应答远程帧的请求,当出现错误或仲裁失败时,具有自动重发数据功能。
本文主要介绍使用TMS320LF2407A进行CAN通信时硬件和软件方面的设计。
2 DSP功能介绍本系统采用的TMS320LF2407A微处理器主要包括以下一些功能模块:(1)一个32位的中央算术逻辑单元(CALU)。
TMS320LF2407的CAN模块使用方法

} L A M0 - H= 0 x 0 0 0 0 0 ;
L~ M0 L= 0 x 0 0 0 0 0 ;
_
} MDER= 0 x O0 o 0 : M CR= 0 x 0 o o O: M CRl =O x O1 0 0 ; } MS GI D0 H =0 x 4 O o 0 :
MCR&= ~ Ox l o 0 O :
MCRl _ 0 x 04 8 0 ;
w h i l e ( ( GS R & O x O 0 1 0 ) != 0 1 c o n t i n u e ;
} C A N jMR = 0 x 0 E1 F F ;
CAN I FR= 0 x 0F F FF ;
* MS GCT RL 5 = 0 x 0 8 ;
MCRI = 0 x l o o O:
w h i l e ( ( G S R& 0 x 0 0 1 0 ) = = 0 )c o n t i n u e ;
* BCR2 = 0 x 0 OF F ; * BCR1 = 0 x 0 2 F F ;
—
2 . T MS 3 2 0 L F 2 4 0 7 C A N模块的软件编程
2 . 1 正确配置通信所用引脚 C AN通 信所 用 引脚 的正确 配置 是 C A N通信 软 件编 程 的基础 . C A N通信所用的两个引脚 c A N t x和 c A N n 【 可 以复用为普 通输入输 出 口( I O P C 6和 I O P C 7 ) 和C A N收发 口 . 在进行 接 口配置 时第 一步 要编 写代码 . * MC R B = 0 x O O C 0 , 把 引脚 配置 为 C A N收发引脚 。 2 . 2 C A N传输速率 的初 始化 在C A N 模块工作之前必须对 C A N的传输速率和邮箱进行初始化 t c l k / ( ( B R P + I ) ( ( T S E G 1 + 1 ) + ( ] E G 2 + 1 ) + 1 ) ) , 其中 I c l k是 C A N模 块系统 时钟 . B R P 为位 传输率 预定 标器件 . T S E G 1 、 T S E G 2 对应 B C R I 中 的 6— 3和 0— 2 如果 I c l k = 3 2 MH Z.执 行 * B C R 2= 0 x 0 O F F ; 和 * B C R 1 = 0 x 0 2 F F : 可 以得到 5 k h / s 传输速率 2 _ 3 C AN收发邮箱的初始化 其 中邮箱 的初始化包括X  ̄ I t l I  ̄ 箱属性域 、控制域和数据域 的设 置 , 其 中属性域设置邮箱 I D和对远程 帧的处理 .控制域包含数据长 度的 控制 . 数据域 以 4 个 1 6 位字存放 最多 8 个字节 的数据 。 是待 发送 和接 收的数据存放 空间 。下面为 C A N收发邮箱的初始化代 码 ( 邮箱 0 接 收. 邮箱 5 发送 . 数据帧长度为 8 ) :
TMS320LF2407A数字信号处理器的串行通信设计

数字信号处理器。它将数字信号处理的高速运算功能与面向电机 的强大控制能力结合在一起 , 从而成为 传统的多微处理器单元 和多片设计系统的理想替代品。T S2 I20 A片内外设包括 l 通道双 l 位 M 30Y 4 7 6 O D转换 器 , 有锁 相环 P L的时钟 模块 , 中断的看 门狗定 时器模 块 WD, 带 L 带 串行 通信 接 口 S I 串行 外设接 C及 口 SI区域控 制器模 块 C N, P, A 另外 , 还集 成 了两 个 事件 管 理模 块 E AE B V /V 。因此 ,M 30 F47 T S2L 20A不 仅具
B F和仿真 数据 接收 缓 冲寄存 器 S IX MU U CR E 。
2 串行 通 信 的硬 件 接 口电路
T S2L 20A的串行通信接 口 S1 M 30 F47 C 支持 C U与其 它任何使用标准格式 的异步外设之间 的数字通 P
信, 通信 接 口有 s rx (c 发 送输 出引脚 ) S IX (C 接 收输 入引 脚 ) cr D s i 和 CR D S I 两个 外部 引脚 , 引脚 的信 号 电平
张伟 , 李铁鹰 陈政石 ,
(. 1茂名学院 计算机与 电子信 息学院 , 东 茂名 550 ; . 广 200 2 太原理 工大学 信 息工程 学院 , 山西 太原 002 ) 304
摘要: 介绍数字信号处理器 T S2 I' ( A的特点及其 异步串行通信模块 (C) M 3 0k 4 7 2Y S I,给出了一种 串行通信 接 1 (C) 2 S I的硬件实 1 现方法 , 并详细讨论了该硬件 电路可实现 的几种通 信方式 。该设计方法简单易行 , 具有一定 的通用 性。 关键 词 :S ;M 3 0k 4 T S I串行通信 D P T S2 I' (A;C ; 2Y
基于TMS320LF2407和CAN总线的通信应用设计
D 2 07 SP 4
CN A 模块 CN A 收发 器
P A8 C 0 C 2 25
C A N
Do篓 C S7 P P 发 2I A N C A N 器 8 收 2
C 50 2
CN A 收 发 器
PA C 82 C5 20
模 块
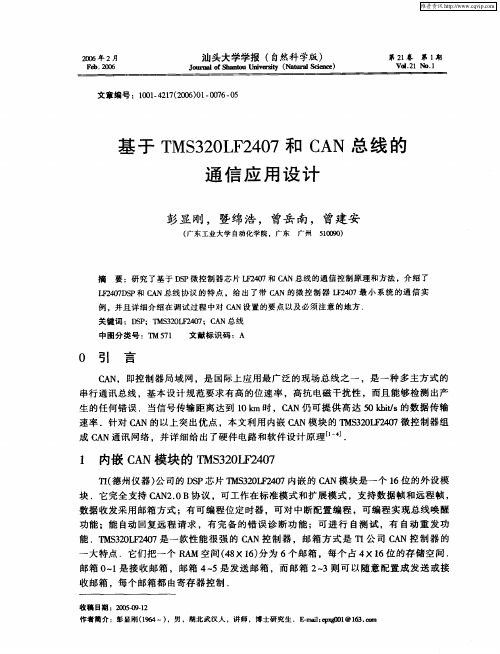
图 1 系 统 原 理 图
V0 . 1 № . I2 1
文 章 编 号 :10 .27 20 )1 07 .5 0 14 1(060 . 06 0
基 于 T 3 0 F 4 7和 C N 总 线 的 MS 2 L 2 0 A 通 信 应 用 设 计
彭显 刚 , 暨绵 浩 , 曾岳 南 , 曾建安
( 东 T q 大 学 自动化 学 院 ,广 东 广 _l , 广州 509 ) 100
维普资讯
第 1 期
彭 显 刚 等 :基 于 T S 2I2 0 M 30Y 4 7和 C N总 线 的通 信 应 用 设 计 A
7 7
2 应 用 实例 设 计
针对 1 f I公 司 T S2 L 20 内 嵌 的 C N 模 块 的 方 便 性 和 实 用 性 , 本 文 用 M 30 F 4 7 A T S 2 L 20 M 3 0 F 4 7微 控制 器组成 一个 C N总 线 网络 ,进 行 实 时收 发 数据 ,并根 据 各 自邮箱 A 的标识 符判 别数 据是 接收 还是 丢弃 .C N 收发 器使 用 P IIS的 P A 2 2 0 A H LP C 8 C 5 ,此 应 用 实 例可扩 展性 强 ,功能强 大 ,若要 增 加节 点个 数 ,只需要 在 C N 总线 上挂 接带 有 C N模 A A
| 德州仪 器 ) 司的 D P芯片 T S 2 L 20 n( 公 S M 3 0 F 47内嵌 的 C N模 块是 一 个 1 的外 设模 A 6位
基于TMS320LF2407A的双CAN口同步通讯板设计
De i n o ub e CAN o ts n- o m un c to o r ba e n TM S 2 LF2 0 A sg fdo l p r y c m i a i n b a d s d o 30 47
T C N 网络 必 须在 指 定 时 隙 内 实 时 完 成 数 据 接 收 、发 送 、 YA 交 换 和 处 理 的特 点 . 只有 将 T 3 0 F 4 7的 内部 C MS 2 L 2 0 AN控 制 器 配 合 内部 高 速 总 线 、 速 R M 以及 D P强 大 的运 算 能 力 。 高 A S 才 能 满 足 T C N 网 络 要 求 .因 此 选 用 T 3 0 F 4 7的 内 部 YA MS 2 L 2 O
维 修 性 ,针 对 桌 型 防 空 武 器 内部 T 'A 网 络 的 时 间 触 发 特 性 .提 出 一 种 基 于 T 3 0 F 4 7和 C N 控 制 器 I N C MS 2 L 2 0 A MC 2 1 P 5 5的 双 C N 口 同步 通 讯 板 的 新 方 案 , 决 了 P C与 T C N 网 络 的 接 口 问题 A 解 L FA 关 键 词 : 端 口 同步 通 讯 ; r A 网络 ; P 5 5 T 3 0 F 4 7 C N 总线 双 TC N MC 2 1 ; MS 2 L 2 0 A; A
1 引 言
随 着 现 代 战 争 要 求 武 器 系 统 在 战 场 条 件 下 的 可 靠 性 和 维 修 性 提 高 ,传 统 分 离 式 控 制 系 统 的 快 速 保 障 难 以 满 足 要
基于TMS320LF2407的CAN通信系统论文

摘要现场总线是连接现场设备和自动化系统的数字式、双向传输、多分支结构的通信网络。
它是计算机技术、通信技术和控制技术高度综合与集成的产物,是一种开放式和分布式的新模式。
现场总线是当今自动化领域技术发展的热点之一。
CAN(控制器局域网)属于现场总线的范畴,是一种有效支持分布式控制和实时控制的串行通信网络。
CAN总线通讯智能节点的设计,是在现场总线系统中分布于现场的一个子系统,能实现数据采集与反馈控制,最大传输速率可达1MB/s,最大传输距离为10km。
节点的核心器件是PHILIPS公司生产的CAN控制器(SJA1000)和CAN驱动器(PCA82C250)以及微控制器(TMS320DSP)。
SJA1000是集成的独立CAN控制器(与PHILIPS早期的CAN控制器PCA82C200完全兼容),它负责完成CAN总线通信协议的物理层和数据链路层的功能。
能够可靠的运行和完成要求的任务,控制信息在现场进行处理,而管理层则在上位机中实现。
该设计体现了CAN总线高性能、高可靠性的特点。
关键词:(请确认是否为小五号字)现场总线,CAN,SJA1000 CAN 控制器,TMS320LF2407,82C250收发器AbstractField bus is a digital, bi-directional and multi-branch communication network that connects field equipments and automatic system. As a product integrating technology of computer, communication and control, the field bus featured with opening and distribution has been one of the key technologies in modern automatism field.As one of the field buses, CAN (Controller Area Network) is a serial communication network that supports distributed and real time control effectively.The communication intelligent nodes design of CAN Bus, is distributes in the field bus system in a scene sub- system, can realize the data acquisition and the closed-loop control, the maximum transmission speed may reach 1MB/S, the maximum transmitting range is 10km. The pitch point core component is the CAN controller which PHILIPS Corporation produces (SJA1000) and the CAN driver (PCA82C250) as well as the micro controller (the TMS320 monolithic integrated circuit). SJA1000 is the integrated independent CAN controller (is completely compatible with PHILIPS early CAN controller PCA82C200), it responsibly completes the CAN main line correspondence agreement the physical level and the data link layer function. Can the reliable movement and completes the request the duty, the control information carries on processing in the scene, but management level then realizes in on position machine. This design shows high performance and high reliability of CAN Bus. Keywords:Field bus, CAN, Distributed Measurement Control System, SJA1000 CAN Controller, 82C250 Transceiver, MCU TMS320标红的这两句不对,请修改目录1 绪论 (1)1.1 概述............................................................................................ 错误!未定义书签。
[VIP专享]高性能数字信号处理器TMS320LF2407A及应用
![[VIP专享]高性能数字信号处理器TMS320LF2407A及应用](https://img.taocdn.com/s3/m/9f42c8c9ad02de80d4d840a4.png)
高性能数字信号处理器TMS320LF2407A及应用数字信号处理器(DSP)已经发展了20多年,最初仅在信号处理领域内应用。
近年来,随着半导体技术的发展,其高速运算能力使很多复杂的控制算法和功能得以实现,同时将实时处理能力和控制器的外设功能集于一身,在控制领域内也得到很好的应用。
数字控制系统克服了模拟控制系统电路功能单一、控制精度不高的缺点,它抗干扰能力强,可靠性高,可实现复杂控制,增强了控制的灵活性。
TMS320LF2407A 是美国TI公司推出的新型高性能16位定点数字信号处理器,它专门为数字控制设计,集DSP的高速信号处理能力及适用于控制的优化外围电路于一体,在数字控制系统中得以广泛应用[1]。
本文介绍其体系结构、功能特性及其在控制领域中的应用,为数字控制系统的设计提供参考。
2 体系结构和功能特性2.1 系统组成TMS320LF2407A系统组成包括:40MHz、40MIPS的低电压3.3V CPU、片内存储器、事件管理器模块、片内集成外围设备[2]。
其体系结构框图如图1所示。
2.2 CPU及总线结构TMS320LF2407A 的CPU是基于TMS320C2XX的16位定点低功耗内核。
体系结构采用四级流水线技术加快程序的执行,可在一个处理周期内完成乘法、加法和移位运算。
其中央算术逻辑单元(CALU)是一个独立的算术单元,它包括一个32位算术逻辑单元(ALU)、一个32位累加器、一个16×16位乘法器(MUL)和一个16位桶形移位器,同时乘法器和累加器内部各包含一个输出移位器。
完全独立于CALU的辅助寄存器单元(ARAU)包含八个16位辅助寄存器,其主要功能是在CALU操作的同时执行八个辅助寄存器(AR7至AR0)上的算术运算。
两个状态寄存器ST0 和ST1用于实现CPU各种状态的保存。
TMS320LF2407A 采用增强的哈佛结构,芯片内部具有六条16位总线,即程序地址总线(PAB)、数据读地址总线(DRAB)、数据写地址总线(DWAB)、程序读总线(PRDB)、数据读总线(DRDB)、数据写总线(DWEB),其程序存储器总线和数据存储器总线相互独立,支持并行的程序和操作数寻址,因此CPU的读/写可在同一周期内进行,这种高速运算能力使自适应控制、卡尔曼滤波、神经网络、遗传算法等复杂控制算法得以实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘 要: 介绍了TMS320LF2407A的CAN控制器模块, 分析了CAN控制器模块的硬件结构、通讯收发器选取、波特率的
设 置 、邮 箱 发 送 以 及 远 程 帧 的 发 送 与 接 收 。
关键词: CAN控制器模块; 邮箱; 远程帧; 通信
中图分类号: TP21
文献标识码: A
文章编号: 1672- 7800(2008) 01- 0095- 02
第刊 Software Guide
Vol.7 No.1 Jan. 2008
TMS 320LF2407A的CAN控制器模块 及其CAN通信设计
郑旭浩1, 2, 刘 博1, 岳晓峰1
( 1.长春工业大学, 吉林 长春 130012; 2.吉林交通职业技术学院, 吉林 长春 130021)
· 96 ·
软件导刊
2008 年
如发送成功, 发送应答位 TAn 和邮箱中断标志位 MIFn 均被置 1; 如总线仲裁失败, CAN 控制器稍后会自动重发该信息。如 果多个发送邮箱的发送请求位置位, 则信息帧将一个接一个地 发送出去, 邮箱权限高的先发送。如发送失败, 则发送邮箱再 次发送。 3.3.2 信息接收
定时器、邮箱的发送或接收使能、错误状态及 CAN 的中断等。
2 硬件电路中收发器的选取
TMS320LF2407A 中集成了一个 CAN 控制器, 当与 CAN 总
图 2 SN65HVD23x 系列 CAN 收发器引脚分布图
3 CAN通讯程序设计方法
线 接 口 时 , 必 须 配 上 CAN 收 发 器 ( Transceiver) 作 为 CAN 控 制 3.1 通信波特率的设置
1 TMS320LF2407A 的 CAN控制器模块
TMS320LF2407A 的 CAN
控 制 器 模 块 是 DSP 内 部 集 成
的一个 16 位的外设模块, 支持
CAN2.0 协议。其硬件模块结构
框图如图 1 所示。
CAN 控 制 器 模 块 以 邮 箱
为信息对象来发送和接收报
文, 它有 6 个邮箱( 邮箱 0、1 用 于接 收 , 4、5 用 于 发 送 , 而 邮 箱
[ 5] BOSCH.CAN Specification Version 2[ Z] .1991. [ 6] SAE Standard Recommended Practice for a serial Control and
Communication Vehicle Network J1939( Draft) [ s] .1997. [ 7] 邬宽明.CAN 总线原理和应用系统设计[ M] .北京: 北京航空航天
图 1 LF2407A DS P 的 CAN 硬件模块结构
16KV, 温度升高到一定值时总线会自动关闭, 节点上电或移去
2、3 可配置为发送或接收) , 每次可以传送 0 到 8 字节数据。邮 对总线上的其它节点没有影响, 技术标准兼容 ISO11898。引脚
箱位于一个 48×16 位的 RAM 中, 可以被 CPU 或 CAN 读写。每 分布如图 2 所示。
器 和 物 理 总 线 的 接 口 , TI 公 司 专 门 为 3.3V 供 电 的 24x 系 列
波特 率 由 位 定 时 器 ( 包 括 寄存 器 BCR0, BCR1) 决 定 , 配 置
DSP 设 计 了 3 个 型 号 的 CAN 总 线 收 发 器 : SN65HVD230、 位定时器也就是设置这两个寄存器。BCR0、BCR1 寄存器决定
SN65HVD231 和 SN65HVD232。它们都是采用 3.3V 电源, 有很 了 CAN 控制器的通信波特率、同步跳转宽度、采样次数和重同
高 的 输 入 阻 抗 , 总 线 上 最 多 可 连 120 个 节 点 , ESD 保 护 超 过 步方式。图 3 为通信波特率的设置流程图。
作者简介: 郑旭浩( 1973- ) , 女, 吉林通化人, 长春工业大学硕士研究生, 研究方向为车载网络系统; 刘博( 1982- ) , 男, 吉林长春人, 长春工业大学机 电学院硕士研究生, 研究方向为车载网络系统; 岳晓峰( 1971- ) , 男, 吉林通化人, 博士, 长春工业大学机 电 学院 副 教授 、研究 生 导师 , 研 究 方 向 为 机 器 视 觉 与 智 能 检 测 、车 载 网 络 系 统 。
个邮箱都由邮箱标志寄存器、邮箱控制寄存器及 4×16 位的存
储 空 间 组 成 。各 存 储 空 间 用 于 存 储 接 收 或 发 送 的 报 文 数 据 。当
邮箱不使能时, 可作为一般的 RAM 空间供 CPU 使用。CAN 控
制器总共有 15 个 16 位的控制寄存器, 它们控制着 CAN 的位
[ 3] 李正军. 基于 CAN 总线的分布式 测控 系统 智 能节 点 的设 计 [ J] . 自动化仪表, 2003( 6) : 25- 28.
[ 4] 李洪波, 王旭东, 薛玲.基于 DSP 的 CAN 总线节点的研究 与 通信 实现[ J] .哈尔滨理工大学学报, 2005( 4) : 72- 74.
大学出版社, 1996. [ 8] TMS320LF/LC240XDSP Controllers Reference Guide, System and
Peripherals, 2001. [ 9] 邬宽明.现场总线技术应用选编[ M] .北京 : 北 京航 空 航天 大 学出
版社, 2005. ( 责任编辑: 杜能钢)
图 6 接收信息过程
4 结束语
本文介绍了 TI 公司 TMS320LF2407A 芯片中内嵌 CAN 控 制器的结构、相关收发器的选取以及 CAN 总线技术通讯时的 程序设计方法。在一些特殊场合, TMS320LF2407A 有非常强大 的功能, 比单片机的效率要高得多, 它与 CAN 总线的联合应用 有广阔的发展空间。
当 CAN 控制器接收到新信息时, RMPn 和 MIFn 均被硬件 置 1, 这两位必须由用户软件清 0, 具体见图 6 所示。
图 3 通信波特率的设置框图
3.2 初始化邮箱 对邮箱初始化主要是设置邮箱的标识符, 发送的是远程帧
还是数据帧及对发送的数据区 ( 即对 MBXnA ̄MBXnD) 赋 初 值。图 4 为初始化流程图。
参考文献:
[ 1] 刘 和 平.TMS320LF240xDSP 结 构 、原 理 及 应 用 [ M] .北 京 : 北 京 航 空航天大学出版社, 2002.
[ 2] 张 毅 刚 , 赵 光 权 , 孙 宁.TMS320LF240x 系 列 DSP 原 理 、开 发 与 应 用[ M] .哈尔滨: 哈尔滨工业大学出版社, 2006.
图 4 初始化邮箱框图
3.3 CAN 总线上信息的发送与接收 3.3.1 信息发送
图 5 发送信息过程
发送数据采用查询方式, 其流程图如图 5 所示。只有当 TRSn 和 TRRn 均为 0 时, 可对邮箱进行写数据操作。反之, 拒 绝写中断标志( WDIF) 将被置 1, 产生中断。CPU 将数据写入 邮箱后, 设置 TRSn 为 1, 然后 CAN 控制器就将信息发送出去,