基于DOE方法的转速传感器输出电压的精确控制
高精度、高响应无感无刷电机转速控制
高精度、高响应无感无刷电机转速控制发布时间:2021-07-23T07:03:54.831Z 来源:《中国电业》(发电)》2021年第7期作者:王朝庆1 张琴2[导读] 目前无传感器无刷直流电机位置检测方法有反电动势法[1]、续流二极管通断检测法[2]、三次谐波法[3]等,当前比较流行的方法为反电动势过零点法,该方法较其它两种方法原理较简单、操作方便、稳定可靠、工程上容易实现且成本较低,并在工程上大量使用。
1.中国电子科技集团公司第四十三研究所安徽合肥 230088;2.合肥产品质量监督检验研究院安徽合肥 230088摘要:针对当前现有无位置传感器速度控制系统精度低、响应慢等缺点,开展无感无刷电机速度控制一体化设计,基于TMS320F28335处理器为核心器件的无位置传感器无刷直流电动机控制系统硬件高精度、抗干扰等方面设计,结合软件滤波完成对转子位置快速检测和速度计算。
并借助带有前馈控制算法设计实现电机转子速度的快速、精确闭环控制,有效地提升了无刷电机速度动态响应和准确度,并通过实验对该控制系统设计加以验证。
关键词:无感电机;无刷电机;速度控制;TMS320F283350引言目前无传感器无刷直流电机位置检测方法有反电动势法[1]、续流二极管通断检测法[2]、三次谐波法[3]等,当前比较流行的方法为反电动势过零点法,该方法较其它两种方法原理较简单、操作方便、稳定可靠、工程上容易实现且成本较低,并在工程上大量使用。
由于无位置传感器电机在速度很低的情况下是不能够通过上述方法检测转子的位置信号,无法通过闭环的方式起动电机;因此,为了实现电机的自起动,通常采用开环起动法[4]和电感法[5]。
前者工程实现简单,操作方便、控制精度低;后者较前者精度高,但实现相对复杂,工程上通常采用开环法实现。
然而,速度闭环控制的精度不仅仅取决于位置检测精度和合适的控制方式,还取决于硬件电路设计所带来信号的完整性,以及硬件和软件导致的精度与延迟问题。
简述霍尔式转速传感器的检测方法
简述霍尔式转速传感器的检测方法
霍尔式转速传感器是一种常用的转速传感器,通过检测霍尔效应
来实现对转速的测量。
以下是霍尔式转速传感器的检测方法:
1. 校准:霍尔式转速传感器需要经过校准才能准确测量转速。
校准方法一般为将传感器固定在一个已知转速的电机上,观察传感器输
出的脉冲数或电压值是否与电机转速相匹配,如果不匹配则需要进行
校准。
2. 测量输出电压:霍尔式转速传感器通常输出一个霍尔电压,这
个电压与电机转速成正比。
可以通过测量输出电压来估算电机转速。
3. 测量输出脉冲数:霍尔式转速传感器也输出一个脉冲数,这个
脉冲数与电机转速成反比。
可以通过测量输出脉冲数来估算电机转速。
4. 使用比较器:可以使用比较器来比较传感器输出脉冲数和电
机转速,从而估算电机转速。
需要注意的是,霍尔式转速传感器的输出精度受到霍尔元件本身
的影响,同时也受到机械损耗和电流误差等因素的影响,因此需要进
行校准和不断优化,以提高测量精度和稳定性。
一种新型汽车柴油发动机转速测量仪校准装置的设计_蔡旭平
求 ;(3 ) 由于传统校准装置采用了专用柴油发动机 , 导 致装置不仅体积较大 , 不利于开展现场或在线校准 , 同时还会给环境带来不可避免的噪声和气体污染 。 由此可见 , 传统校准装置存在的上述问题均源于 其配置的专用柴油发动机 。 传统校准装置之所以采用 专用柴油发动机 , 是基于保证校准有效性的考虑 , 即 为校准提供与转速测量仪测量对象一致的测量对 象— —— 由发动机喷油发出具有特征频率的管振动 。 这 一振动既是保证转速测量仪校准结果有效性的基础 , 又是导致校准装置在量值溯源性 、 复现性 、 稳定性 、 校 准范围和准确度等方面存在弊端的原因所在 。 二 、 设计方案 兼顾量值溯源关系与测量对象两个方面的要求 , 在确保校准结果有效性的基础上摒弃 装置配置的专 用柴油发动机 , 应是解决校准装置上述问题的基本出 发点 。 显然 , 为确保校准的有效性 , 新型校准装置仍应 保持以振动为测量对象 ; 为打通校准装置量值的溯源 通道 , 应建立该振动与转速计量标 准直接联系的通 道 ; 为提高和扩大校准装置的复现性 、 稳定性 、 校准准 确度和测量范围 , 该振动还应能被准确控制 。
!
广西壮族
中国测试技术研究
上海市汽车运输科学技术研究所 】 计来自74中国计量 2015.4
AVL 传感器在转速比为 1∶1 条件下进行了比对实验 , 其
实验数据如表 2 所示 。 由表 1 和表 2 可见 , 若以比对对象为参考 , 新型汽 车柴油发动机转速测量仪校准装置在各种 转速条 件 下 , 其示值误 差 均 小 于 ±1% , 新 型 校 准 装 置 整 体 的 测 量水平至少应与 AVL 传感器相当 。 五 、 结束语 新型汽车柴油发动机转速测量仪校准装 置 ,通 过其步进电机与标准转速 表 的 直 接 耦 合 ,其 量 值 溯 源 途 径 清 晰 、准 确 、可 靠 ;通 过 计 算 机 数 字 化 控 制 的 步进电机所带动敲击锤敲 击 振 动 管 发 出 的 振 动 ,不 仅保持了测量的有效 性,还 扩 大 了 新 型 校 准 装 置 的 测量范围和测 量结果的准 确 与 可 靠 性 ;由 于 摒 弃 了 传统装置配置的柴油发动机, 新型校准装置体积 小 、重 量 轻 、噪 音 小 、可 操 作 性 强 、便 于 携 带 ;新 型 校 准装置可在任意设定的发 动 机 转 速 工 况 下 ,为 检 测 柴 油 车 功 效 与 污 染 物 排 放 ( 炭 烟 及 PM 颗 粒 物 ) 提 供 客观、公正的基础技术支持,为汽车 及内燃机支柱 产业的质量提升和品牌建设提供计量技术支撑。 作者单位 【 蔡旭平 院 、 许基 全付付 韦煜祺 自治区计量检测研究院 、 黄晓蓉
传感器测电机转速实验
实验五传感器测电机转速实验一、实验目的了解磁电式传感器、霍尔传感器测量转速的原理及方法。
二、基本原理磁电式传感器:基于电磁感应原理,N 匝线圈所在磁场的磁通变化时,线圈中感应电势:发生变化,因此当转盘上嵌入n 个磁钢时,每转一周线圈感应电势产生n 次的变化,通过放大、整形和计数等电路即可以测量转速。
霍尔传感器:利用霍尔效应表达式:U H=K H IB,当被测圆盘上装上N 只磁性体时,圆盘每转一周磁场就变化N 次。
每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。
三、需用器件与单元主机箱、磁电式传感器、霍尔传感器、转动源。
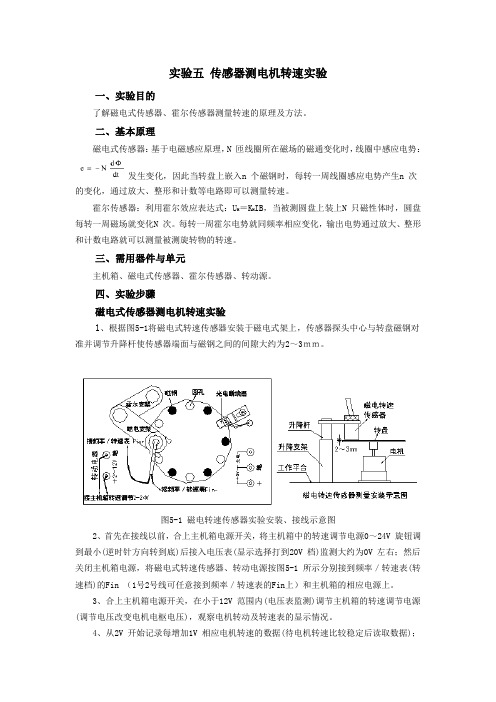
四、实验步骤磁电式传感器测电机转速实验1、根据图5-1将磁电式转速传感器安装于磁电式架上,传感器探头中心与转盘磁钢对准并调节升降杆使传感器端面与磁钢之间的间隙大约为2~3mm。
图5-1 磁电转速传感器实验安装、接线示意图2、首先在接线以前,合上主机箱电源开关,将主机箱中的转速调节电源0~24V 旋钮调到最小(逆时针方向转到底)后接入电压表(显示选择打到20V 档)监测大约为0V 左右;然后关闭主机箱电源,将磁电式转速传感器、转动电源按图5-1 所示分别接到频率/转速表(转速档)的Fin (1号2号线可任意接到频率/转速表的Fin上)和主机箱的相应电源上。
3、合上主机箱电源开关,在小于12V 范围内(电压表监测)调节主机箱的转速调节电源(调节电压改变电机电枢电压),观察电机转动及转速表的显示情况。
4、从2V 开始记录每增加1V 相应电机转速的数据(待电机转速比较稳定后读取数据);填入表5-1。
表5-1磁电式传感器测转速实验数据开关式霍尔传感器测电机转速实验1、根据图5-2将霍尔转速传感器安装于霍尔架上,传感器的端面对准转盘上的磁钢并调节升降杆使传感器端面与磁钢之间的间隙大约为2~3mm。
图5-2 霍尔转速传感器实验安装、接线示意图2、首先在接线以前,合上主机箱电源开关,将主机箱中的转速调节电源0~24V 旋钮调到最小(逆时针方向转到底)后接入电压表(显示选择打到20V 档)监测大约为0V 左右;然后关闭主机箱电源,将霍尔转速传感器、转动电源按图5-2 所示分别接到主机箱的相应电源和频率/转速表(转速档)的F in 上。
提高光电型红外转速传感器测量准确度的方法
提高光电型红外转速传感器测量准确度的方法提高光电型红外转速传感器测量准确度的方法包括以下几个方面:
1. 光学和机械结构优化:采用适当的光学和机械结构,可以降低杂散光线对传感器的干扰,提高传感器的抗干扰能力。
例如,可以采用多层光学涂层和精密机械制造技术,使得传感器表面尽量保持光滑和完整,减少光线反射和折射的影响。
2. 跟踪动态电平的平均值电路:采用跟踪动态电平的平均值电路,可以有效降低杂散光线对传感器测量的干扰。
这种电路可以实时监测传感器输出信号的动态电平,当遇到杂散光线时,自动降低传感器的输出信号强度,减少干扰对测量准确度的影响。
3. 适当的算法优化:采用适当的算法优化,可以提高传感器的测量准确度。
例如,可以采用基于模糊算法的优化方案,通过对传感器测量结果进行模糊分析,可以有效排除干扰因素,提高测量准确度。
4. 优化响应频率:优化传感器的响应频率,可以提高传感器的测量准确度。
例如,可以采用高速采样电路和数字信号处理技术,使得传感器可以快速响应信号变化,减少测量误差。
总结起来,提高光电型红外转速传感器测量准确度需要从光学和机械结构、电路算法等多个方面进行优化。
通过合理的设计和实际应用,可以提高传感器的抗干扰能力和测量准确度,满足各种应用场景的需求。
基于霍尔传感器的转速检测装置_汪云

基于霍尔传感器的转速检测装置*汪 云(襄樊学院机械工程系,湖北襄樊441003)摘 要:开发了一种模拟发动机转速信号的霍尔转速传感器检测装置,这种装置主要为发动机电控单元(ECU )提供转速信号,通过对霍尔转速传感器信号进行滤波和整形,使处理后的信号转换成标准的方波信号,实验表明,该转速信号完全能满足发动机电子控制单元的设计需要。
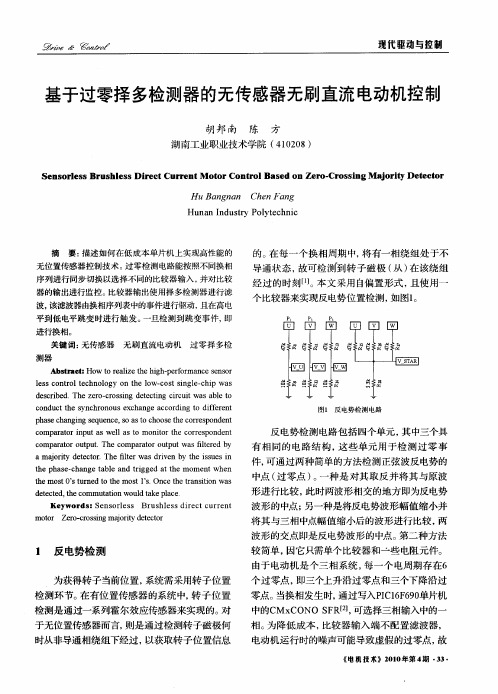
关键词:霍尔转速传感器;信号盘;检测中图分类号:T H824+.1 文献标识码:B 文章编号:1000-9787(2003)10-0045-03Rotational speed test device based on Hall sensorWANG Yun(Dept of Mech Engin ,Xiangfan University ,Xiangfan 441003,China )A bstract :A kind of simulatio n engine speed signal test device of Hall speed sensor is developed ,it principally provides ro tational speed signal for engine electronic control unit (ECU ),throug h filtering and reshaping to engine Hall speed sensor signal ,to change transacted signal to standard square wave signal .Ex perimenta tio n show s the rotational speed signal totally can meet a demand for design of engine ECU .Key words :Hall rotational speed senso r ;sig nal dish ;test0 引 言电控柴油机中,转速不仅仅是发动机的一个简单的工作参数,而且是电子控制系统其它参数计算的依据和控制喷射正确时的基准,转速信号是通过转速传感器测量而得的,如果传感器不能稳定地工作,电控系统也就无法正确地控制发动机正常工作。
基于过零择多检测器的无传感器无刷直流电动机控制
Hu a n u t o y e h i n n I d sr P l t c n c y
摘
要 : 述如 何在 低 成本 单片机 上实 现高性能 的 描
的。 在每一个换相周期 中, 将有一相绕组处于不
无位 置传感器 控制技 术 。 过零 检测 电路能按 照不 同换 相 序 列进行 同步切换 以选 择不 同的比较器 输入 , 并对 比较
电动机运行时的噪声可能导致虚假的过零点 , 故
导通状态, 故可检i 转子磁极 ( 在该绕组 贝 幢U 从)
经 过的时刻 。 1 本文采用 自 偏置 形式 , 且使 用一 个比较器来实现反电势位置检测 , 如图l 。
器 的输 出进行监 控 。 比较器 输 出使 用择 多检 测器 进行滤 波, 滤波器 由换相序列 表中的事件进行驱动 , 该 且在 高电 平到 低 电平跳 变 时进行 触 发 。 一旦检 测 到跳 变 事件 , 即
进行换相 。 关键 词 : 无传感 器
测器
Ab t a t Ho t e lz eh g — e f r n e s n o s r e : w r a i e t i h p ro ma c e s r o h
无刷 直 流电动机
过 零择 多检
l s o to e h o o y o he l w- o ts n l - hi s e s c n r lt c n l g n t o - s i g e- p wa c c d s rb d h e o c o sn e e tn i u t e c i e T e z r ・ r s i g d tc i g cr i wa b e t c sa l o c n u tt e s n h o o s e c a g c o d n o d fe e t o d c h y c r n u x h n e a c r i g t if r n p a ec a g n e u n e S st h o et e c r e p n e t h s h n i g s q e c , O a oc o s o r s o d n h c m p r t r i p ta l a o mo i r t e c r e p n e t o a a o n u swel st n t h o r s o d n o
检测与转换技术习题集答案
检测与转换技术习题第1章绪论、检测与转换技术的理论基础一、单项选择题1.一块量程为800℃,2.5级测温仪表,现要测量500℃的温度,其相对误差为【 B 】A.20℃ B.4% C.1.6% D.3.2%2.某温度仪的相对误差是1%,测量800℃炉温时,绝对误差是【 D 】A.0.08℃ B.8% C.0.8℃ D.8℃3.漂移是指在输入量不变的情况下,传感器输出量随()变化【 D 】A.温度 B.电压 C.电流 D.时间4.下列四个选项中,关于相对误差特征正确的是【 D 】A.大小与所取单位有关 B.量纲与被测量有关C.不能反映误差的大小和方向 D.能反映测量工作的精细程度5.下面哪一种情况可能会产生随机误差【 D 】A.测量人员的粗心大意 B.检测装置的指示刻度不准C.许多因素的微小变化之和 D.传感器的不稳定6.某量程为1000Kg的秤,相对误差是1%,则测量10Kg重物的绝对误差是【 C 】A 1KgB 10%C 0.1KgD 10Kg7. 属于传感器动态特性指标的是【 D 】A.重复性 B.线性度 C.灵敏度 D.固有频率8. 下列技术指标中,描述传感器静态特性的是【 C 】A.阶跃特性 B. 频率特性 C. 线性度 D. 时间常数9.精确度是反映检测系统误差和( )误差的综合评定指标。
【 D 】A.静态 B.动态 C.附加 D.随机10. 在选择压力表量程时,必须考虑到留有充分的余量。
一般在被测压力较稳定的情况下,最大压力值不应超过压力仪表满量程的【 C 】 A.1/3 B.2/ 3 C.3/4 D.满量程11.下面不是系统误差产生的主要原因的是【 B 】A.检测装置指示刻度不准 B.测量人员粗心大意C.测量原理方法不当 D.测试环境的变化二、多项选择题1.下列哪几项属于随机误差的特性【ABCE 】A.有界性 B.单峰C.对称性 D.替代性E.抵偿性三、填空题1.运算⨯-∆=δmin max max L y y L 100%是计算传感器 的公式。
基于霍尔传感器的转速测量系统的设计
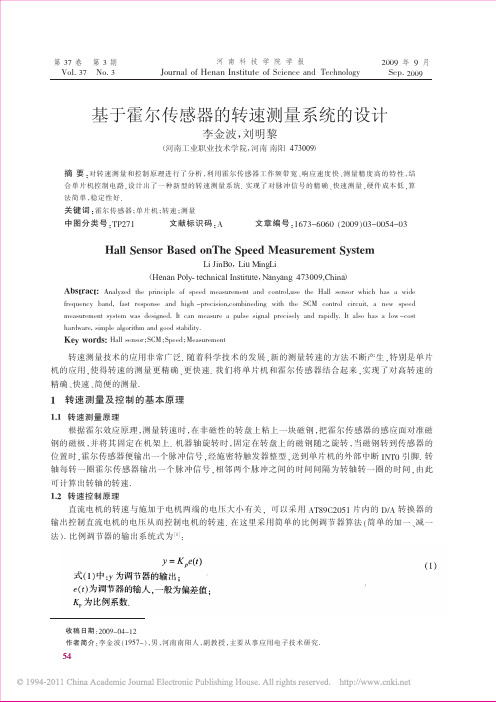
收稿日期:2009-04-12作者简介:李金波(1957-),男,河南南阳人,副教授,主要从事应用电子技术研究.基于霍尔传感器的转速测量系统的设计李金波,刘明黎(河南工业职业技术学院,河南南阳473009)摘要:对转速测量和控制原理进行了分析,利用霍尔传感器工作频带宽、响应速度快、测量精度高的特性,结合单片机控制电路,设计出了一种新型的转速测量系统.实现了对脉冲信号的精确、快速测量,硬件成本低,算法简单,稳定性好.关键词:霍尔传感器;单片机;转速;测量中图分类号:TP271文献标识码:A 文章编号:1673-6060(2009)03-0054-03Hall Sensor Based onThe Speed Measurement SystemLi JinBo ,Liu M ingLi(Henan Poly-technical Institute ,Nanyang 473009,China )Abstract:Analyzed the principle of speed measurement and control,use the Hall sensor which has a wide frequency band,fast response and high -precision,combineding with the SCM control circuit,a new speed measurement system was designed.It can measure a pulse signal precisely and rapidly.It also has a low -cost hardware,simple algorithm and good stability.Key words:Hall sensor ;SCM ;Speed ;Measurement)(t e K y p ?(1)转速测量技术的应用非常广泛.随着科学技术的发展,新的测量转速的方法不断产生,特别是单片机的应用,使得转速的测量更精确、更快速.我们将单片机和霍尔传感器结合起来,实现了对高转速的精确、快速、简便的测量.1转速测量及控制的基本原理1.1转速测量原理根据霍尔效应原理,测量转速时,在非磁性的转盘上粘上一块磁钢,把霍尔传感器的感应面对准磁钢的磁极,并将其固定在机架上.机器轴旋转时,固定在转盘上的磁钢随之旋转,当磁钢转到传感器的位置时,霍尔传感器便输出一个脉冲信号,经施密特触发器整型,送到单片机的外部中断INT0引脚.转轴每转一圈霍尔传感器输出一个脉冲信号,相邻两个脉冲之间的时间间隔为转轴转一圈的时间,由此可计算出转轴的转速.1.2转速控制原理直流电机的转速与施加于电机两端的电压大小有关,可以采用AT89C2051片内的D/A 转换器的输出控制直流电机的电压从而控制电机的转速.在这里采用简单的比例调节器算法(简单的加一、减一法).比例调节器的输出系统式为[1]:式(1)中:y 为调节器的输出;e (t )为调节器的输人,一般为偏差值;K p 为比例系数.第37卷第3期373Vol.No.河南科技学院学报Journal of Henan Institute of Science and Technology 2009年9月2009Sep.54李金波等:基于霍尔传感器的转速测量系统的设计第3期从式(1)可以看出,调节器的输出y与输入偏差值e(t)成正比.因此,只要偏差e(t)一出现就产生与之成比例的调节作用,具有调节及时的特点,这是一种最基本的调节规律.比例调节作用的大小除了与偏差e(t)有关外,主要取决于比例系数K p,比例调节系数愈大,调节作用越强,动态特性也越大.反之,比例系数越小,调节作用越弱.对于大多数的惯性环节,K p太大时将会引起自激振荡.比例调节的主要缺点是存在静差,对于扰动的惯性环节,K p太大时将会引起自激振荡.对于扰动较大,惯性也比较大的系统,若采用单纯的比例调节器就难于兼顾动态和静态特性,需采用调节规律比较复杂的PI(比例积分调节器)或PID(比例、积分、微分调节器)算法.2系统的硬件设计该测量系统的结构如图1所示.主要由单片机、霍尔传感器、施密特触发器和显示器等组成.图1测量系统的结构单片机采用AT89C2051芯片,其功能与MCS-51兼容,特点如下:20引脚封装,无P0和P2口,内部有2KE2PROM,对不需扩展程序存储器的系统特别适用.具有体积小,安装方便,价格便宜等优点.控制器AT89C2051主要完成转速脉冲的采集、16位定时计数器计数定时、运算比较、转速控制以及数码显示等多项功能.霍尔传感器是把霍尔元件、温度补偿电路、放大器及稳压电源等集成在一个芯片上,然后封装起来构成的.由于霍尔传感器测量方式属于补偿式测量[2],所以具有良好的精确度(±1%)和线性度(≤0.1%×额定电流).霍尔传感器分为线性和开关型两种,线性霍尔传感器主要用于位移、压力、电功率等测量,开关型霍尔传感器主要用于转速、转角、液位等测量.使用的霍尔传感器为开关型的,其输出波形如图2所示[3].3系统的软件设计测量转速的关键是快速准确地测量转轴每旋转一圈的时间.转轴旋转时,霍尔传感器输出的信号经施密特触发器74LS14整形后其波形如图3所示.图2开关型霍尔传感器的输出波形图3经施密特触发器整形后的波形此信号送到单片机的INT0引脚,设置外部中断0为边沿触发方式,在脉冲信号的下降沿向CPU发出中断请求.同时利用单片机的定时器T0进行定时,测量两次中断之间的时间.为了测量的方便设置一个测量标志flag,初始化flag为0.第一次外部中断产生,将flag置1,同时启动定时器开始定时,在紧接着的下次中断时关闭定时器,将flag清零.这样在flag=1时,定时器计时,测量转轴转一圈的时间,在flag=0时,定时器停止计时,计算转速,如此重复进行测量,即可测得转轴的即时转速.定时器T0中断服55(a)定时器T0中断服务程序.(b)外部中断服务程序图4程序流程。
霍尔转速传感器测速

实验中使用的霍尔转速传感器型号为MODEL-A,其输出电压与转速成正比。传感器与被 测物体表面保持一定距离,通过电磁感应方式测量转速。
测量过程
首先,将霍尔转速传感器放置在被测物体表面,并调整传感器与被测表面的距离。然后, 开启传感器电源,待稳定后记录输出电压值。为获取准确的转速信息,需要对输出电压进 行采样和数据处理。
06
参考文献与致谢
参考文献
[1] 张三, 李四. 霍尔转速传感器测速 原理及应用研究. 北京: 科学出版社, 2020.
[2] Wang, L., Zhang, Y., & Chen, H. (2019). Advances in Hall-effect sensor technologies for speed measurement. Journal of Sensors, 15(3), 45-52.
工业自动化
在工业自动化领域,霍尔转速传感器被用于各种机械设备的速度监测和 控制,如传送带、生产线等,以提高生产效率和产品质量。
霍尔转速传感器在其他领域的应用
航空航天
在航空航天领域,霍尔转速传感器可用于监测涡轮发动机的转速,以及飞机和火箭的飞行速度。这对于确保飞行器的安全和性能至关重要。
能源
在能源领域,风力发电和太阳能发电等可再生能源需要精确监测发电机和太阳能电池板的转速,以优化发电效率和能量转换。霍尔转速传感器可用于这些应用 中。数据处理与结果析数据采样数据处理
在实验中,使用数据采集器对霍尔转 速传感器的输出电压进行采样,采样 频率为10Hz。
将采样数据导入计算机中进行处理, 通过软件对数据进行滤波、平滑处理 ,以减小误差。
结果分析
经过数据处理后,可以得到被测物体 的实时转速数据。通过对这些数据的 分析,可以得出被测物体的转速变化 趋势、峰值以及平均转速等重要信息 。例如,如果被测物体是一辆汽车的 车轮,那么这些信息可以帮助研究人 员了解车轮的旋转速度、制动性能等 方面的性能。
一种提高开关电源输出精度的控制方法[发明专利]
![一种提高开关电源输出精度的控制方法[发明专利]](https://img.taocdn.com/s3/m/a368691bf90f76c660371aa0.png)
专利名称:一种提高开关电源输出精度的控制方法
专利类型:发明专利
发明人:徐申,于利民,陶蓉蓉,陈威宇,孙伟锋,陆生礼,时龙兴申请号:CN201810785261.7
申请日:20180717
公开号:CN109004840A
公开日:
20181214
专利内容由知识产权出版社提供
摘要:一种提高开关电源输出精度的控制方法,基于包括采样模块、精度控制模块、误差计算模块、PID模块以及PWM模块构成的控制系统,该控制系统与受控的开关电源连接起来构成一个闭环,通过检测输出电压控制模式切换,在输出电压超出上限电压时,通过模式切换使电路进入DCM模式,减小输入能量,使输出电压稳定在调节范围内,在输出电压低于下限电压时,通过模式切换使电路进入CCM模式,增加输入能量,使输出电压快速恢复到调节范围内。
在正常调节过程中,输出电压的变化被限制在上限电压与下限电压之间,电压输出纹波减小,精度得以提高。
申请人:东南大学
地址:210096 江苏省南京市玄武区四牌楼2号
国籍:CN
代理机构:南京经纬专利商标代理有限公司
代理人:奚幼坚
更多信息请下载全文后查看。
一种基于数据采集的转速实时测试系统及控制方法[发明专利]
![一种基于数据采集的转速实时测试系统及控制方法[发明专利]](https://img.taocdn.com/s3/m/bee8e23849649b6649d74750.png)
专利名称:一种基于数据采集的转速实时测试系统及控制方法专利类型:发明专利
发明人:陈丽霞,蒋韫韬
申请号:CN202010608899.0
申请日:20200630
公开号:CN111751568A
公开日:
20201009
专利内容由知识产权出版社提供
摘要:本发明涉及测试设备与智能监控领域,具体涉及一种基于数据采集的转速实时测试系统及控制方法。
包括转速实时测试单元、数据采集系统、控制信号处理模块和控制中心。
所述转速实时测试单元包括隔离模块、供电模块、频率电压转换模块,所述数据采集系统通过采集转速电压、压强信号,判断转速电压和压强信号,所述控制信号处理模块用于处理数据采集系统产生的控制信号;所述控制中心根据控制信号处理模块产生的信号对转速进行适时测试和监控。
本发明可实现转速传感器输出脉冲频率的实时测试,根据频率和压力作出快速判读,并向控制中心发出反馈信号,从而提高试验实时测试与控制的可靠性、精确性,提升试验测控水平,扩展试验测控范围。
申请人:内蒙航天动力机械测试所
地址:010076 内蒙古自治区呼和浩特市赛罕区黄合少镇南地村1054信箱601所
国籍:CN
更多信息请下载全文后查看。
基于霍尔传感器的电机转速控制设计
• 3.3.4 A44E的导通距离 测量
• 把一块小永久磁铁固定在 车轮的辐条上,A44E 在车 轮辐条附近,如图3-5所示。 经过实验得知,当磁铁和霍 尔开关A44E移近到一定距 离(设此距离为 r )时,A44E 芯片的OUT引脚有脉冲信 号输出。当二者的距离大 于 r时,OUT引脚没有脉冲 信号输出。在本设计实际 制作中多次测量得出霍尔 开关A44E导通的距离 r为 43mm到5 mm。
• 3.5显示电路的设计
• 3.5.1 显示电路设计 • 本设计显示电路使用
1602液晶模块显示,显示 效果良好。 • 3.5.2 液晶模块简介 • 实物1602液晶模块及管脚 介绍
• 字符型液晶是一种用5×7点阵图形来显示字符的液晶显示器,根 据显示的容量可分1行16个字、2行16个字、2行20个字等。最常 用的是2行16个字,如上图。 • 第1脚:VSS为电源地,接GND。 • 第2脚:VDD接5V正电源。 • 第3脚:液晶显示偏压信号 • 第4脚:数据/命令选择端(H/L) • 第5脚:读/写选择端(H/L) • 第6脚:E为使能信号,当E端由高电平跳变为低电平时,液 晶模块执行命令。 • 第7~14脚:D0~D7为8位双向数据线 • 第15脚: BLA背光电源正极(接+5V) • 第16脚: BLK背光电源负极(接GND)
• 3.3.3 A44E的磁输入 检测
•
A44E的磁输入为单极磁 场,即施加磁场的方式是改 变磁铁和 A44E之间的距 离。判定磁铁极性方法是: 把磁铁的两个极分别靠近 A44E 的正面,当其 OU T 引脚电平由高变低时即为 正确的安装位置,如图下图 所示。经过实验得 知,A44E 只对磁铁的 S 级 有响应而对 N级没有丝毫 响应。安装时一定要让磁 铁的 S级对准 A44E的反 应传感区。
转速信号
摘要:介绍一种简单、便携、多功能的发动机转速信号模拟器,采用PWM信号逼近的方法生成幅值随发动机转速变化的磁电信号,采用输出比较的方式输出霍尔信号。
该模拟器可以方便地设定发动机参数和实时在线修改发动机转速,并能够实时显示。
实验结果表明,该模拟器具有信号精度高、发动机转速范围大的特点。
引言随着发动机电控系统的结构和控制策略日趋复杂,电控系统的研发工作难度以及实验工作量大大增加,成本也大幅度提高。
V型开发模式已经成为发动机ECU(Electronic Control Unit,电子控制单元)开发流程的主流,其中的硬件在环仿真中,为了配合ECU软件的开发,需要模拟发动机的转速信号来验证软件算法的正确性。
目前已经有很多研发人员已经做了这方面的研究。
例如,清华大学的章健勇开发的发动机转速模拟器系统利用数字端口实现了大转速范围内发动机转速霍尔信号的模拟;北京理工大学的王宇明设计的便携式发动机工况信号模拟器,能够比较真实地模拟发动机传感器信号的类型、形态,基于模型的信号产生方法能够较好地反映发动机工况变化中传感器的内在关系,并且提出了把霍尔信号通过硬件逐步转化成为磁电信号的方法;北京城建设计研究总院的赵华伟设计的转速模拟器采用硬件方式产生频率方波信号和电流信号的方法,不仅能够提供发动机所需的方波信号,而且频率调节精度高,能够实现电流的输出。
这些模拟器尚不能模拟得到理想的磁电信号,并且对发动机参数变化的适应性很差。
本文提出一种生成标准磁电正弦信号的方法,并在此基础上设计了一款便携、灵活的发动机转速信号模拟系统。
磁电正弦信号可以通过硬件转化和软件逼近两种方法得到,实验证明前者得到的磁电信号精度不高,与真实磁电信号差异较大,所以本文采用软件逼近的方法。
软件分段逼近分为DA分段逼近和PWM分段逼近。
DA分段逼近的方法需要外扩一块D/A芯片,且转化过程需要占用大量单片机资源,不能满足高频的需求,所以本文选用PWM分段逼近的方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于DOE方法的转速传感器输出电压的精确控制
目前,我厂转速传感器输出电压的控制较为粗放,一致性较差,实际测量结果与设计指标误差较大,设计存在反复,影响研发周期。
文章基于实验设计(DOE)方法,运用Minitab软件,对输出电压进行流程分析及降噪处理,通过实验方案设计、实施、分析,构建合理模型,给出拟合公式,并经预测、验证,提出有效的控制手段。
标签:DOE;Minitab;转速传感器;输出电压;精确控制
1 概述
磁电式传感器运用电磁感应原理,将输入的运动速度转换成感应电动势输出,具有不需要供电电源、电路简单、性能稳定、输出阻抗小等优点[1]。
磁电式转速传感器广泛应用于发动机转速测量,在监控发动机状态过程中发挥着重要作用。
当发动机工作时,具有导磁性的音轮旋转,通过传感器线圈的磁通量发生周期性变化,传感器线圈中产生周期性电压,通过对输出电压处理计数,测出齿轮转速[2]。
根据磁场回路的大小,磁电式传感器可分为开放式磁电转速传感器和半封闭式磁电转速传感器。
开放式磁电转速传感器外壳是不导磁的,线圈在磁钢和音轮组成的大回路的磁场下工作,音轮旋转时产生交变的磁场,使线圈产生感应电势。
开放式磁电转速传感器对磁钢的要求不高,一般采用普通的铝镍钴永磁材料。
虽然在使用过程中磁性能容易下降,但可以在外部用重新充磁来调整,容易返修。
半封闭式磁电转速传感器是由铁芯、磁钢、导磁体、外壳组成的E形磁导体和音轮构成小回路的磁场,當音轮旋转时,磁场变化,在线圈内产生感应电动势。
半封闭式磁电转速传感器要求磁钢的磁性能强,一般采用钐钴磁钢。
半封闭式磁电转速传感器在使用中如果磁性能下降,很难再重新充磁。
由于易调整的特点,目前我厂的磁电式传感器以开放式磁电转速传感器为主。
下文论述均以开放式磁电转速传感器为基础。
目前,我厂转速传感器输出电压的控制较为粗放,一致性较差,实际测量结果与设计指标误差较大,设计存在反复,影响研发周期。
本文基于实验设计(DOE)方法,对输出电压进行流程分析及降噪处理,运用Minitab软件,通过实验方案设计、实施、分析,构建合理模型,给出拟合公式,并经预测、验证,提出有效的控制手段。
2 流程分析
转速传感器是根据电磁感应原理设计的,完整的测量系统由传感器及音轮两部分组成。
音轮按齿形不同可分为端面齿音轮与径向齿音轮,如图1所示。
以径向齿音轮为例,传感器的测量端正对音轮的齿,传感器的测量端与音轮的齿之间存在间隙,音轮转动时,间隙交替变化周期性地改变磁路中的磁阻,磁阻周期性
的变化引起通过线圈磁通量的变化(见图2),线圈两端输出周期性、上下对称的脉冲电压信号,如图3所示。
随着音轮转速的升高,输出电压幅值增大,直至达到饱和。
a.端面齿音轮
b.径向齿音轮
转速传感器将非电量转速信号转换为对称的脉冲信号,脉冲的频率值与转速的关系为:
其中,n为音轮转速,f为脉冲频率值,Z为音轮齿数。
由于音轮齿数Z为常数,从式(1)中可以看出,转速n与脉冲的频率值f 成正比关系。
转速传感器一般由铁芯、磁钢、外壳、端盖及线圈等组成,铁芯在为传感器提供磁通路径的同时也作为骨架供绕制线圈用,图4所示为磁电式转速传感器典型结构。
输出电压峰值Em=NBSω (2)
其中,N为线圈匝数,B为通过线圈的磁感应强度,S为线圈横截面积,ω为线圈切割磁场角速度。
B主要由磁钢磁感应强度B0和铁芯磁导率μ两大参数决定,其他影响因素有传感器測量端与音轮之间的间隙δ、音轮材料磁导率μ’等。
S由骨架外径D1及线圈外径D2决定,如图5所示,线圈外径D2又与匝数N、漆包线直径d、骨架长度L相关。
ω由音轮齿数Z和音轮转速n决定。
3 降噪处理及实验方案设计
对于某个确定的测量系统及固定的测量频率,音轮间隙δ、音轮材料磁导率μ’、骨架外径D1、漆包线直径d、骨架长度L、音轮齿数Z、音轮转速n可视为常量。
主要变量为线圈匝数N,磁钢磁感应强度B0,铁芯磁导率μ。
由此,确定响应为低频输出电压峰值Em,实验设计变量为线圈匝数N,磁钢磁感应强度B0,铁芯磁导率μ。
水平选择:3因子,2水平,3个中心点,全因子,共11次实验。
响应变量与参数:以某型转速传感器为例,线圈匝数[1800,2000],
磁钢磁感应强度[1000,1200],铁芯磁导率[24000,30000]。
运用Minitab软件生成的实验设计方案如图6所示。
4 实验实施
通过Ansoft/Maxwell 3D有限元仿真分析软件对低频输出电压峰值进行仿真计算。
仿真结果见图7。
5 实验分析
运用Minitab软件对实验结果进行分析。
低频输出峰值的主效应图见图8,无交互效应。
由图8可见,三个变量对响应的影响均显著,从斜率来看,对响应的影响程度排序为磁钢磁感应强度>线圈匝数>铁芯磁导率,这与图9所示的Pareto图结果一致。
6 模型构建
运用Minitab软件对实验结果进行因子回归分析。
得到如下回归方程:
低频输出峰值=-0.914+0.000279线圈匝数+0.000679磁钢磁感应强度+0.000005铁芯磁导率
模型合理与否的关键指标如下:R-sq=97.52%>80%,R-sq(调整)=96.46%>80%,R-sq(预测)=95.04%>80%。
线圈匝数P值=0.000<0.05,磁钢磁感应强度P值=0.000<0.05,铁芯磁导率P值=0.009<0.05。
由以上指标可见,回归方程准确度较高,能较好的解释现有的实验结果,可用于后续预测。
7 预测及验证
运用Minitab软件生成响应与变量的曲面图和等值线图。
图10~图15分别为铁芯磁导率取24000、27000、30000的情况下低频输出峰值与磁钢磁感应强度、线圈匝数的曲面图和等值线图。
由图可见,低频输出峰值与磁钢磁感应强度、线圈匝数呈正相关,并且可粗略地通过为磁钢磁感应强度、线圈匝数赋值,对低频输出峰值进行控制。
图16~图18为分别为铁芯磁导率取24000、27000、30000的情况下低频输出峰值(0.55~0.58)与磁钢磁感应强度、线圈匝数的等值线图。
通过在图中白色区域取值,可将低频输出峰值精确控制在0.55~0.58范围内。
运用Minitab软件进行响应优化预测。
如图19所示,取目标值0.565(0.55与0.58的均值),得到结果:当线圈匝数=1854.9945,磁钢磁感应强度=1200,铁芯磁导率=27151.8260时,可使低频输出峰值预测值达到0.565。
关键指标:合意性指数=1,拟合值标准误=0.00630,95%置信区间为(0.55011,0.57989),95%预测区间为(0.53125,0.59875),表明预测结果可信。
运用Ansoft/Maxwell 3D有限元仿真分析软件进行验证,线圈匝数取1855,磁钢磁感应强度取1200,铁芯磁导率取27152,仿真结果为0.56073,与预测值0.565相比,两者误差仅1%,构建的模型得到验证,其拟合度较高。
8 控制计划
基于回归方程,运用等值线图和响应优化器,通过为线圈匝数、磁钢磁感应强度、铁芯磁导率赋值,可精确控制输出电压,实现其数值望大、望小及望目等目的。
9 结论
本文基于实验设计(DOE)方法,对输出电压进行流程分析及降噪处理,运用Minitab软件,通过实验方案设计、实施、分析,构建合理模型,给出拟合公式,并经预测、验证,提出有效的控制手段。
参考文献
[1]强锡富.传感器[M].北京:机械工业出版社,2002.
[2]陈思娟,王海涛.增大磁电式转速传感器输出的方法研究[J].仪器仪表学报,2009,30(6):742-745.。