信号控制电路
PWM控制电路原理

PWM控制电路原理
PWM(Pulse Width Modulation)控制电路是一种通过改变矩
形波脉宽来控制电压或电流输出的技术。
它通过在一个周期内改变矩形波的高电平时间(即脉宽),从而改变电路输出的平均值。
PWM控制电路的原理基于以下几个要点:
1. 时钟信号:PWM控制电路需要一个时钟信号作为基准。
这
个时钟信号的频率决定了矩形波的周期。
2. 设定值(Set Point):PWM控制电路的输入是一个设定值,即所期望的输出值。
例如,如果控制电路是用来控制电机的转速,设定值就是所期望的转速。
3. 反馈信号:PWM控制电路通过一个反馈信号来获取实际的
输出值。
例如,对于电机转速控制电路,可以使用一个速度传感器来获取实际转速。
4. 比较器:PWM控制电路会将设定值和反馈信号进行比较,
得到一个误差值。
比较器通常会产生一个高电平或低电平的输出,表示误差的方向。
5. 控制器:PWM控制电路的核心是一个控制器,它根据比较
器的输出来调整矩形波的脉宽。
控制器可以采用不同的算法,例如比例控制、积分控制和微分控制等。
6. 动作执行器:PWM控制电路的最终目的是通过改变输出的平均值来控制某个设备或系统。
动作执行器可以是一个开关,也可以是一个控制电压或电流的电路。
根据控制器的算法不同,PWM控制电路可以实现不同的控制效果,例如稳定输出、精确调节和快速响应等。
它在各个领域都有应用,包括电机控制、照明调光、数码电子和通信等。
交通信号灯控制电路的设计与仿真

交通信号灯控制电路的设计与仿真交通信号灯是城市道路上的重要交通设施。
它不仅能够引导车辆行驶方向、保障行人安全出行,还能有效地控制交通流量,缓解车辆拥堵问题。
然而,要使交通信号灯发挥作用,就需要一个可靠的信号控制电路。
本文将介绍交通信号灯控制电路的设计与仿真。
1. 控制电路设计交通信号灯控制电路是一种可编程逻辑电路(FPGA)。
它可以根据不同的交通需要配置不同的控制方案。
基本的控制方案有三种:顺序控制、时间计划控制和循环控制。
1.1 顺序控制顺序控制是最简单的交通信号灯控制方案,它依次控制交通灯的颜色。
设计电路需要先设置一个时钟,并定义各信号灯的状态,例如,当橙色灯亮的时候,等待5秒钟后,绿色灯亮;当绿色灯亮时,等待10秒钟后,红色灯亮。
这样的交通信号灯控制方案简单、稳定,但是不适用于复杂的交通环境。
1.2 时间计划控制时间计划控制是根据交通流量和道路容量的不同,对交通信号灯的时间进行调整的控制方案。
具体做法是,通过交通流量传感器测量每个方向的车辆流量并累积,运用时序控制器进行计算,并对红绿灯时间进行动态调整。
这样可以保证交通信号灯实时地适应不同的流量情况,但是需要大量的传感器和计算器。
1.3 循环控制循环控制是一种随机的交通信号灯控制方案,通过交通数据和计算机模型确定路口交通灯每轮的时间长度,并以不同的顺序轮换信号灯,这样按照循环周期可能使交通流量更加均衡,并且可以排除一些失误。
但是需要进行大量的计算,并且不适用于复杂的交通环境。
2. 仿真设计完成后,需要对交通信号灯控制电路进行仿真,以检验控制电路的稳定性和有效性。
仿真软件通常有多种,本文介绍两种常用的仿真软件。
2.1 QucsQucs是一个免费的仿真软件,具有模拟、线性和非线性仿真电路的能力,可以模拟电路和系统的频段、噪声和传输等特性。
在Qucs中,可以很容易地设计复杂的控制电路,通过仿真分析不同方案的控制效果。
2.2 SPICESPICE是一种常用的模拟软件,主要用于电路和系统仿真。
信号机控制电路原理
信号机控制电路原理信号机控制电路包括点灯电路和主灯丝断丝报警电路两部分,其中点灯电路是通过室内联锁设备的动作,控制信号机的显示。
例如进站信号机点灯电路,它通过室内LXJ、TXJ、ZXJ、LUXJ、YXJ等的动作,点亮信号机的不同灯位,从而给出各种显示。
为保证信号机显示正确,点灯电路采用了位置法、双断法等保护措施。
位置法,即将控制条件放在电源和负载(室外信号变压器、灯泡)之间。
双断法,如在绿灯的去线和回线中都加入LXJ↑的条件。
为监督室外灯泡是否确实被点亮,室内装设了1DJ和2DJ,通过对电路中有无电流的检查,达到来监督灯泡是否被点亮的目的,从而做到灯光灭灯时能及时报警,允许灯光灭灯时自动改点禁止灯光。
信号机点灯电源为220V交流电,采用室内集中供给方式。
室外对应每一灯位装设一台信号变压器,这样一方面可以达到隔离供电目的,防止一处混线时造成错误点灯;另一方面则做到了高电压,低电流传输,减少电缆线路的衰耗和对电缆线路的技术要求。
对于各种类型的信号机,其点灯电路的控制条件各不相同,像调车信号机仅受DXJ 控制,各种复示信号机也仅受其主体信号机的XJ控制。
在这里我们特别提出,出站信号机除受站内联锁条件控制外,还有受闭塞条件的控制。
如在半自动闭塞区段,出站信号机的XJ电路中,要加上KTJ↑和XZJ↓的条件。
在交流计数闭塞区段,出站信号机的XJ电路中,加有1LQJ↑条件;点灯电路中加有2LQJ的吸起和落下条件,用来控制点绿灯还是点黄灯。
为保证不间断显示,信号机采用双丝灯泡,并在主灯丝回路中串联灯丝转换继电器DZJ,正常情况下,灯泡被点亮时DZJ↑,利用其后接点切断付丝回路。
在主灯丝断丝情况下,DZJ落下,自动改点付丝。
主灯丝灯丝报警电路,对于较大的站场,可每个咽喉设置一套设备,对较小的站场可两个咽喉共用一套设备,每套设备设一个断丝报警继电器DSJ,在控制台上设一个断丝报警灯和一个断丝报警电铃。
进站信号机平时处于关闭状态,点亮红灯,若红灯主丝完好则HDZJ吸起,切断DS1、DS2通过进站信号机可构成的回路。
液晶彩电信号处理与控制电路概述

液晶彩电信号处理与控制电路概述 液晶彩电信号处理与控制电路主要包括输入接口电路、公共通道电路、视频解码电路、A/D转换电路、去隔行处理电路、SCALER电路、微控制器电路和伴音电路等,这些电路一般安装在一块电路板上,此电路板一般称之为“主板”。
主板电路是液晶彩电最关键、最复杂的电路部分,作为维修人员,必须掌握其基本工作原理与信号流程。
第一节液晶彩电输入接口电路介绍 液晶彩电与其他设备之间连接使用,接收视频和音频信号需要通过特定标准的结合方式来实现,这些拥有固定标准的输入方式就是输入接口。
液晶彩电的输入接口负责接收外来视频和音频信号,常见的输入接口有HDMI接口、DVI接口、VGA接口、YPbPr色差分量输入接口、S端子接口、AV音频/视频输入接口、ANT天线输入接口、RS-232C接口等,此外,一些多媒体娱乐功能丰富的液晶彩电产品还配有USB接口、IEEE 1394接口和读卡器插槽等。
图3-1是Philips 32TA2800液晶彩电各输入接口示意图。
图3-1 Philips 32TA2800液晶彩电各输入接口示意图 从图中可以看出,Philips 32TA2800液晶彩电设置有AV1、S-Video、YPbPr、DSUB(VGA)、DVI-D等多个输入接口。
下面对液晶彩电中常用的输入接口作一简要介绍。
一、ANT天线输入接口 ANT天线输入接口也称RF射频接口,是家庭有线电视采用的接口模式。
RF的成像原理是将视频信号(CVBS)和音频信号相混合编码后输出,然后在显示设备内部进行一系列分离/解码的过程输出成像。
由于步骤烦琐且音、视频混合编码会互相干扰,所以它的输出质量是最差的。
目前生产的液晶彩电都具有此接口,接收时,只需把有线电视信号线连接上,就能直接收看有线电视。
ANT天线输入接口外形如图3-2所示。
图3-2 ANT天线输入接口二、AV接口 AV接口是液晶彩电上最常见的端口之一,标准视频接口(RCA)也称AV接口,通常都是成对的白色的音频接口和黄色的视频接口,它通常采用RCA(俗称莲花头)进行连接,使用时只需要将带莲花头的标准AV线缆与相应接口连接起来即可。
控制电路的工作原理
控制电路的工作原理
电路控制是通过合理的设计和配置电路元件,以实现特定的功能和控制目标。
控制电路的工作原理主要涉及以下几个方面:
1. 信号传输:控制电路通常需要通过信号传输来实现信息的传递和转换。
信号可以是电流、电压或频率等,在电路中通过导线、电缆或无线电波进行传输。
2. 逻辑运算:控制电路中的逻辑运算是基础的操作,它通过将输入信号进行逻辑运算,并通过输出信号来实现控制目标。
逻辑运算可以包括与门、或门、非门等,通过它们的组合可以实现更复杂的控制逻辑。
3. 时序控制:许多控制电路需要根据特定的时间序列来实现控制目标。
时序控制可以通过计时电路、时钟信号等方式实现,以确保电路按照事先设计的顺序和时间来执行。
4. 脉冲宽度调制(PWM):PWM是一种常用的控制电路技术,通过控制信号的高电平和低电平时间比例来实现对输出的控制。
PWM可以用于调节电机速度、控制亮度等应用场景。
5. 反馈控制:在一些需要持续监测和调整的控制电路中,反馈控制起着重要的作用。
通过采集反馈信号并与设定值进行比较,可以实现对输出信号的动态调整和稳定控制。
除了以上几个方面,控制电路的工作原理还与具体应用场景和
控制目标有关。
因此,在设计和实现控制电路时,需要根据具体情况进行综合考虑和优化。
液晶彩电信号处理与控制电路概述

液晶彩电信号处理与控制电路概述液晶彩电是现代家庭娱乐中不可或缺的设备之一。
其显示效果的优劣直接关系到观众的观看体验。
液晶彩电信号处理与控制电路起着至关重要的作用,它们负责对输入信号进行处理和控制,以提供清晰、流畅的图像和音频输出。
本文将概述液晶彩电信号处理与控制电路的基本原理和主要组成部分。
一、信号处理电路概述液晶彩电的信号处理电路主要包括输入端信号源解码、图像处理、音频处理和输出端接口等模块。
1. 输入端信号源解码输入端信号源解码模块用于接收并解码外部信号源的输入。
常见的信号源包括电视信号、视频信号、音频信号等。
在这一模块中,需要将输入信号转换为电视机内部可处理的数字信号。
2. 图像处理图像处理模块负责对输入的图像信号进行处理和优化。
其中包括亮度、色彩等参数的调节,以及针对不同图像场景的降噪处理和锐化处理等。
3. 音频处理音频处理模块用于对输入的音频信号进行处理和放大,以提供清晰、逼真的声音输出。
这部分主要涉及音频解码、声音场景调节和音频放大等功能。
4. 输出端接口输出端接口模块负责将处理后的信号输出到液晶屏幕和音箱等输出设备。
这包括液晶屏的驱动和刷新,以及音频信号的输出放大等。
二、控制电路概述液晶彩电的控制电路主要负责对整个电视机的各种功能进行控制和管理。
它包括主控芯片、存储芯片、遥控器接收器等组成部分。
1. 主控芯片主控芯片是液晶彩电的核心,它负责整个电视机的逻辑控制和信号处理。
主控芯片通常包含中央处理器(CPU)、图像处理器(GPU)、音频处理器(ADSP)等子模块,以及相关的外围接口。
2. 存储芯片存储芯片用于存储电视机的配置参数、预设图像和音频等数据。
这些数据可以通过用户界面进行修改和管理,以实现个性化的使用体验。
3. 遥控器接收器遥控器接收器模块负责接收并解码遥控器发送的红外信号,将用户的操作指令传递给主控芯片。
这使得用户可以通过遥控器轻松地控制电视机的各种功能。
三、总结液晶彩电信号处理与控制电路是液晶彩电的核心组成部分,它们通过对输入信号的处理和控制,确保电视机能够提供清晰、流畅的图像和音频输出。
交通信号灯控制逻辑电路设计

交通信号灯控制逻辑电路设计交通信号灯控制逻辑电路设计一、引言交通信号灯是交通管理系统中至关重要的一部分,它能够有效地控制车辆和行人的安全通行。
本文旨在设计一个具有高可靠性和可扩展性的交通信号灯控制逻辑电路,以实现以下目标:1.确保交通信号灯在正确的时间点亮和熄灭;2.实现多种交通模式的控制,如日常、高峰和紧急模式;3.具备故障检测和恢复功能,提高系统的可靠性。
二、系统设计1.硬件设计交通信号灯控制逻辑电路主要由以下几个部分组成:(1)微控制器:选择具有丰富I/O端口和强大处理能力的微控制器,如STM32。
它负责处理外部输入和控制信号灯的点亮和熄灭。
(2)交通信号灯:包括红、绿、黄三种颜色的LED灯,通过微控制器的GPIO 端口控制其点亮和熄灭。
(3)传感器:包括车辆检测传感器和行人检测传感器,用于检测车辆和行人的通行情况。
(4)存储器:存储交通信号灯的状态、故障信息和交通模式等。
(5)故障检测与恢复模块:实时监测交通信号灯的工作状态,一旦发现故障,立即进行恢复。
2.软件设计(1)操作系统:选择一个适用于微控制器的实时操作系统,如FreeRTOS。
它能够实现多任务管理和优先级调度。
(2)控制算法:根据车辆和行人的通行需求,设计控制算法来确定交通信号灯的点亮和熄灭时间。
(3)通信协议:实现与上位机或其他交通管理设备的通信,传输交通信号灯的状态、故障信息和交通模式等信息。
(4)故障检测与恢复程序:在软件层面实现故障检测与恢复功能,确保系统的可靠性。
三、逻辑电路设计1.日常模式:根据预设的时间表控制交通信号灯的点亮和熄灭,同时考虑车辆和行人的通行需求。
2.高峰模式:在高峰时段,延长绿灯时间,缩短红灯时间,提高车辆通行效率。
同时确保行人安全通过。
3.紧急模式:在紧急情况下,如交通事故或火灾,开启应急闪烁模式,以提醒车辆和行人注意安全。
同时,将相关信息传输给上位机和其他交通管理设备。
4.故障检测与恢复:实时监测交通信号灯的工作状态,一旦发现故障,立即进行恢复。
断路器的控制和信号电路
实用电路三:液压操作机构的断路器控制信号电路
(3)油压严重下降, 不能满足故障状态下 断路器跳闸要求时, 应能自动跳闸。当油 压降低到12.6MPa时, 微动开关触点S5闭合 ,启动中间继电器, 其常开触点闭合,使 断路器自动跳闸且不 允许再合闸。
33
实用电路四:音响监视的断路器控制信号电路
发 事 故 音 响
自动 跳闸
保护装置动作前 (KCC带电,发 平光)
保护装置 动作 跳开闸后(KCT 带电,发闪光) 发平光 发闪光
38
实用电路四:音响监视的断路器控制信号电路
控制电路 及其电源 监视 控制电路的电源 消失 ? 在合闸(跳闸) 位置,跳闸(合闸) 回路断线? 控制电源正常, 信号电源消失 ?
8
三相操作断路器的控制和信号电路
一、 断路器控制回路的基本要求
(1)断路器操作机构中的合、跳闸线圈是按短时通电设计的, 故在合、跳闸完成后应自动解除命令脉冲,切断合、跳闸 回路,以防合、跳闸线圈长时间通电。 (2)合、跳闸电流脉冲一般应直接作用于断路器的合、跳闸 线圈,但对电磁操作机构,合闸线圈电流很大(35~250A 左右),须通过合闸接触器接通合闸线圈。 (3)无论断路器是否带有机械闭锁,都应具有防止多次合、 跳闸的电气防跳措施。 (4)断路器既可利用控制开关进行手动跳闸与合闸,又可由 继电保护和自动装置自动跳闸与合闸。
合在短路故障上,K2闭合, 断路器跳闸。KCF的电流线 圈启动,KCF的常开闭合
电压 保持 电流 启动
5-8接通或K1被卡死,KCF的 电压线圈得电自保持,KCF的 常闭断开,切断合闸回路。
由防跳继电器构成的电气防跳电路
20
(一)断路器控制信号电路的构成
5.断路器的“防跳”闭锁电路
电路控制的原理是什么原理
电路控制的原理是什么原理电路控制的原理是通过改变电路中的信号,来操控电路的工作状态和性能。
电路控制的实现主要依靠以下几个原理。
1. 电压控制原理:电路中的元件如二极管、晶体管等,可以通过电压的变化来改变其工作状态。
例如,在晶体管的基极处加上一定的电压,可以使晶体管处于导通状态,从而控制电路的信号放大或开关功能。
2. 电流控制原理:电路中的元件如电阻、电感等,可以通过电流的变化来改变其工作状态。
例如,在电路中加入一个可变电阻,通过调节电阻值可以改变电路的电流流过。
3. 频率控制原理:电路中的元件如电容、电感等,可以通过调节频率来改变其工作状态。
例如,通过改变电容器的电容值可以调节电路的频率响应,实现对电路的频率控制。
4. 相位控制原理:电路中的元件如相位锁定环、移位寄存器等,可以通过调节不同信号的相位差来改变电路的工作状态。
例如,相位锁定环可以将输入信号的相位锁定在特定的值上,实现相位同步。
5. 控制逻辑原理:电路中的逻辑门如与门、或门等,可以通过改变控制信号的逻辑值来控制电路的输出。
例如,在与门中,只有当所有输入信号均为高电平时,输出信号才为高电平。
6. 数字控制原理:利用数字信号来控制电路的工作状态。
例如,通过编程控制一个可编程逻辑器件(如FPGA),可以实现对电路的复杂控制,包括逻辑运算、时序控制等。
电路控制的原理在实际应用中有着广泛的应用。
例如,在电子设备中,我们可以通过控制电路来实现对设备的开关、亮度调节、音量控制等功能。
在自动化控制系统中,电路控制则可以实现对各种设备、机械等的自动化控制。
对于电路控制的研究和应用,不仅需要对电路元件和信号的原理有深入的理解,还需要了解不同的控制方法和技术,以及电路控制系统的设计和实现。
只有综合运用各种原理和技术,才能实现高效可靠的电路控制。
无线遥控电路原理
无线遥控电路原理无线遥控电路原理是指通过无线信号进行远程控制的电路。
常见的无线遥控电路原理有红外遥控和无线射频遥控两种。
下面将详细介绍这两种无线遥控电路的原理。
1. 红外遥控电路原理:红外遥控电路利用红外线来传输信号。
一般由遥控器和接收器两部分组成。
遥控器:遥控器内部包含按键开关、红外LED和发射电路。
按键开关由操作人员按下时触发,发射电路将电能转换为红外线信号,通过红外LED发射出去。
接收器:接收器内部包含红外接收头和接收电路。
红外接收头接收到红外信号后,转换为电信号通过接收电路进行处理。
遥控过程:当操作人员按下遥控器上的按键时,遥控器内部的发射电路被激活,开始发射红外线信号。
接收器内部的红外接收头接收到红外线信号后,通过接收电路处理,并将处理后的信号用于控制被控制对象,例如电视机、空调等。
2. 无线射频遥控电路原理:无线射频遥控电路则是利用无线射频信号进行远程控制。
同样由遥控器和接收器两部分组成。
遥控器:遥控器内部包含按键开关、射频电路和无线天线。
按键开关由操作人员按下时触发,射频电路将电能转换为射频信号,通过无线天线发射出去。
接收器:接收器内部包含射频接收模块和接收电路。
射频接收模块接收到射频信号后,通过接收电路进行处理。
遥控过程:当操作人员按下遥控器上的按键时,遥控器内部的射频电路被激活,开始发射射频信号。
接收器内部的射频接收模块接收到射频信号后,通过接收电路进行处理,并将处理后的信号用于控制被控制对象。
无线遥控电路的原理是利用不同的信号进行远程控制,其中红外遥控电路主要适用于近距离遥控,例如电视机、空调等家电;而无线射频遥控电路适用于远距离遥控,例如无线门铃、无线车库遥控器等。
无线遥控电路的实现主要依赖于电路中的传感器和模块,例如红外接收头、发射电路、射频接收模块等。
同时还需要编码和解码技术,用于将按键信息转换为信号,以及将信号转换为控制命令。
此外,无线遥控电路还需要相关的电源和抗干扰措施,以确保信号的稳定传输和可靠性。
控制信号产生电路的设计
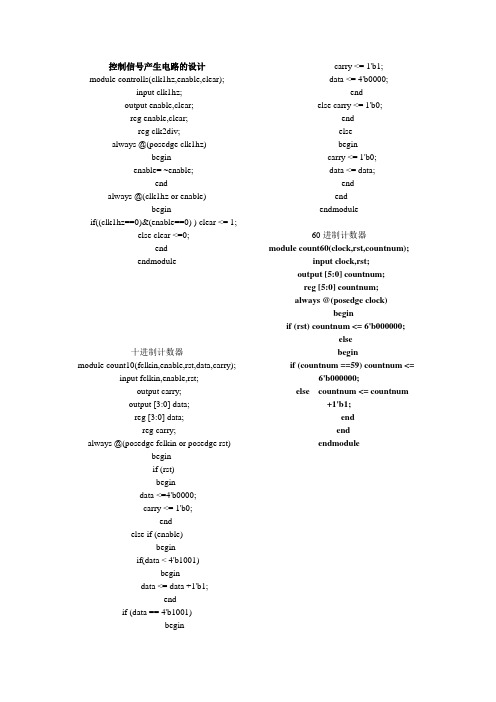
控制信号产生电路的设计module controlls(clk1hz,enable,clear);input clk1hz;output enable,clear;reg enable,clear;reg clk2div;always @(posedge clk1hz)beginenable= ~enable;endalways @(clk1hz or enable)beginif((clk1hz==0)&(enable==0) ) clear <= 1;else clear <=0;endendmodule十进制计数器module count10(fclkin,enable,rst,data,carry);input fclkin,enable,rst;output carry;output [3:0] data;reg [3:0] data;reg carry;always @(posedge fclkin or posedge rst)beginif (rst)begindata <=4'b0000;carry <= 1'b0;endelse if (enable)beginif(data < 4'b1001)begindata <= data +1'b1;endif (data == 4'b1001)begincarry <= 1'b1;data <= 4'b0000;endelse carry <= 1'b0;endelsebegincarry <= 1'b0;data <= data;endendendmodule60进制计数器module count60(clock,rst,countnum);input clock,rst;output [5:0] countnum;reg [5:0] countnum;always @(posedge clock)beginif (rst) countnum <= 6'b000000;elsebeginif (countnum ==59) countnum <=6'b000000;else countnum <= countnum+1'b1;endendendmodule交通灯控制程序module controller(clk,cnum,startew,startsn,rede,redw,reds,redn,greene,greenw,greens,greenn);input clk;input [5:0] cnum;output startew,startsn;outputrede,redw,reds,redn,greene,greenw,greens,greenn;reg startew,startsn;regrede,redw,reds,redn,greene,greenw,greens,greenn;always @(posedge clk)beginif (cnum == 0)beginstartsn <= 1'b1;startew <= 1'b0;endelse if ((cnum >=1) &&(cnum <= 24))beginstartsn <=1'b0;startew <= 1'b0;reds <= 1'b1;redn <= 1'b1;greene <= 1'b1;greenw <= 1'b1;rede <= 1'b0;redw <= 1'b0;greens <= 1'b0;greenn <= 1'b0;endelse if ((cnum >24) &&(cnum < 30))beginstartsn <= 1'b0;startew <= 1'b0;reds <= 1'b1;redn <= 1'b1;greene <= 1'b0;greenw <= 1'b0;rede <= 1'b1;redw <= 1'b1;greens <= 1'b0;greenn <= 1'b0;endelse if (cnum == 30)beginstartsn <= 1'b0;startew <= 1'b1;endelse if ((cnum >30) &&(cnum <= 59))beginstartsn <= 1'b0;startew <= 1'b0;reds <= 1'b0;redn <= 1'b0;greene <= 1'b0;greenw <= 1'b0;rede <= 1'b1;redw <= 1'b1;greens <= 1'b1;greenn <= 1'b1;endelsebeginstartsn <= 1'b0;startew <= 1'b0;reds <= 1'b0;redn <= 1'b0;greene <= 1'b0;greenw <= 1'b0;rede <= 1'b0;redw <= 1'b0;greens <= 1'b0;greenn <= 1'b0;endendendmodule分位倒计时显示控制电路的设计与仿真moduleanticount( clock,startp,data1,data2,enable);input clock,startp;output enable;output [3:0] data2,data1;reg [3:0] data2,data1;reg [4:0] count;reg enable;always @(posedge startp or negedge clock)beginif (startp) enable <= 1'b1;else if (count == 0) enable <= 1'b0;endalways @(posedge clock)beginif (enable)beginif ( count == 0) count = 5'b11110;// 设置倒计时值30秒else count <= count -1'b1;endelse count <= 5'b00000;endalways @(negedge clock)beginif (enable)begindata2 <= count/10;data1 <= count%10;endelsebegindata2 <= 4'b0000;data1 <= 4'b0000;endendendmodule电子抢答器控制模块的设计module voting(ctrlin,key,dataout,clk,reset,ctrlout);input ctrlin,clk,reset;input [7:0] key;output [3:0] dataout;output ctrlout;reg [3:0] dataout;reg ctrlout;always @ (posedge clk )beginif (reset)begindataout <= 4'b0000;ctrlout <=1'b0;endelse if(ctrlin)beginif(key[0]) begin dataout <= 4'b0001;ctrlout <=1'b1; endelse if(key[1]) begin dataout <= 4'b0010;ctrlout <=1'b1; endelse if(key[2]) begin dataout <= 4'b0011;ctrlout <=1'b1; endelse if(key[3]) begin dataout <= 4'b0100;ctrlout <=1'b1; endelse if(key[4]) begin dataout <= 4'b0101;ctrlout <=1'b1; endelse if(key[5]) begin dataout <= 4'b0110;ctrlout <=1'b1; endelse if(key[6]) begin dataout <= 4'b0111;ctrlout <=1'b1; endelse if(key[7]) begin dataout <= 4'b1000;ctrlout <=1'b1; endelse dataout <= 4'b0000;endelse dataout <= dataout;endendmoduleBmodule statemachine(clk,reset,starta,startb,hita,hitb,scorea,scoreb,clear,increasea,increaseb,tablelight,awin,bwin);input clk,reset,starta,startb,hita,hitb;input [4:0] scorea,scoreb;outputclear,increasea,increaseb,awin,bwin;output [8:0] tablelight;reg [8:0] tablestate,tablelight;reg clear,increasea,increaseb,awin,bwin;reg [5:0] state;parameterwaitstate = 6'b100000,atob = 6'b010000,btoa = 6'b001000,ascore = 6'b000100,bscore = 6'b000010,finalresult = 6'b000001;always @( posedge clk)beginif (reset)beginclear <= 0;increasea <= 0;increaseb <= 0;if ( (scorea == 21) ||(scoreb == 21))state <=finalresult;else if (starta == 1)beginstate <= atob;tablestate <= 0;endelse if (startb == 1)beginstate <= btoa;tablestate <= 8;endelsestate <= waitstate;endatob:beginif (hitb == 1)beginif (tablestate <=4) state <= ascore;else state <=btoa;endelsebeginif (tablestate ==8) state <= ascore ;else tablestate <= tablestate + 1'b1;endendbtoa:beginif (hita == 1)beginif (tablestate >=4 ) state <= bscore;else state <=atob;endelsebeginif (tablestate ==0) state <= bscore ;else tablestate <= tablestate - 1'b1;endendascore:beginincreasea <= 1;state <= waitstate;endbscore:beginincreaseb <= 1;state <= waitstate;endfinalresult:beginif (scorea == 21) awin<= 1;else bwin <= 1;enddefault : state <= waitstate ;endcaseendendalways @ ( negedge clk)beginif ( (state == atob) || (state == btoa))case (tablestate)0 : tablelight <= 9'b100000000;1 : tablelight <= 9'b010000000;2 : tablelight <= 9'b001000000;3 : tablelight <= 9'b000100000;4 : tablelight <= 9'b000010000;5 : tablelight <= 9'b000001000;6 : tablelight <= 9'b000000100;7 : tablelight <= 9'b000000010;8 : tablelight <= 9'b000000001;default : tablelight <= 9'b000000000;endcaseelse tablelight <= 9'b000000000;endendmodule五人表决器module w(a,b,c,d,e,pass);input a,b,c,d,e;output reg pass;always @(a,b,c,d,e)beginif(a+b+c+d+e>=3)pass=1;else pass=0;endendmodule去抖module antitwitter (clock,keyin,keyout); input clock,keyin;output keyout;reg[3:0]count;reg keyout;always@(posedge clock)beginif(keyin==1)begincount<=count+4'h1;if(count<=8) keyout<=1'b0;elsebeginkeyout<=keyin;count<=4'h9;endendelsebegincount<=4'h0;keyout<=1'b0;endendendmodule4分频module freg4 (clockin,clockout);input clockin;output clockout;reg[1:0] count;reg clockout;parameter N=1;always@(posedge clockin)beginif(count==N)begincount<=2'b00;clockout<=~clockout;endelse count<=count+2'b01;endendmodule5分频module count5 (reset,clk,cout);input clk,reset; output wire cout;reg[2:0] m,n;reg cout1,cout2;assign cout=cout1|cout2;always @(posedge clk)beginif(!reset) begin cout1<=0; m<=0; endelse begin if(m==4) m<=0; else m<=m+1;if(m<2) cout1<=1; else cout1<=0; endendalways @(negedge clk)beginif(!reset) begin cout2<=0; n<=0; endelse begin if(n==4) n<=0; else n<=n+1;if(n<2) cout2<=1; else cout2<=0; endendendmodule乒乓15modulepingpong15(clk,reset,starta,startb,hita,hitb,sco rea,scoreb,clear,increasea,increaseb,tablelight,awin,bwin) ;input clk,reset,starta,startb,hita,hitb;input [4:0] scorea,scoreb;output clear,increasea,increaseb,awin,bwin; output [14:0] tablelight;reg [14:0] tablestate,tablelight;reg clear,increasea,increaseb,awin,bwin;reg [5:0] state;parameterwaitstate = 6'b100000,atob = 6'b010000,btoa = 6'b001000,ascore = 6'b000100,bscore = 6'b000010,finalresult = 6'b000001;always @( posedge clk)beginif (!reset) //!resetbeginstate <= waitstate;clear <= 0;//awin <= 0;bwin <= 0;endelsebegincase (state)waitstate :beginclear <= 1;//increasea <= 0;increaseb <= 0;if ( (scorea == 21) || (scoreb == 21))state <= finalresult;else if (starta == 0) //beginstate <= atob;tablestate <= 0;endelse if (startb == 0)beginstate <= btoa;tablestate <= 14;endelsestate <= waitstate;endatob:beginif (hitb == 0) //hitb==0beginif (tablestate <= 7) state <= ascore;//b提前击球,a得分;else state <= btoa;endelsebeginif (tablestate == 14) state <= ascore ;//b没击球晚,a得分;else tablestate <= tablestate + 1'b1;endendbtoa:beginif (hita == 0) //hita==0beginif(tablestate >=7 ) state <= bscore; //a提前击球,b得分;else state <= atob;endelsebeginif (tablestate ==0 ) state <= bscore;// a没击球晚,b得分;else tablestate <= tablestate - 1'b1;endendascore:beginincreasea <= 1;state <= waitstate;endbscore:beginincreaseb <= 1;state <= waitstate;endfinalresult:beginif (scorea == 21) awin <= 1;else bwin <= 1;enddefault : state <= waitstate ; endcaseendendalways @ ( negedge clk)beginif ( (state == atob) || (state == btoa))case (tablestate)0 : tablelight <= 15'b011111111111111;1 : tablelight <= 15'b101111111111111;2 : tablelight <= 15'b110111*********;3 : tablelight <= 15'b111011*********;4 : tablelight <= 15'b111101*********;5 : tablelight <= 15'b111110*********;6 : tablelight <= 15'b111111*********;7 : tablelight <= 15'b111111*********;8 : tablelight <= 15'b111111*********;9 : tablelight <= 15'b111111*********;10: tablelight <= 15'b111111*********;11: tablelight <= 15'b111111*********;12: tablelight <= 15'b111111*********;13: tablelight <= 15'b111111*********;14: tablelight <= 15'b111111*********;default : tablelight <= 15'b111111*********;endcaseelse tablelight <= 15'b111111*********; endendmodule循环显示8位moduleseg_cycle(clock,discode,enable,code1,code2, code3,code4);//code5,code6,code7,code8); input clock;input[3:0]code1,code2,code3,code4;//code5,code6,code 7,code8;output[7:0] discode;output[3:0] enable;reg [7:0] discode;reg [3:0] enable;reg [1:0] count;reg [3:0] code;always@(posedge clock)beginif(count==3)count<=0;else count<=count+1'b1;case(count)2'b00:begincode<=code1;enable<=4'b1110;end2'b01:begincode<=code2;enable<=4'b1101;end2'b10:begincode<=code3;enable<=4'b1011;end2'b11:begincode<=code4;enable<=4'b0111;end// 3'b100:begin code<=code5;enable<=8'b00010000;end //3'b101:begincode<=code6;enable<=8'b00100000;end //3'b110:begincode<=code7;enable<=8'b01000000;end //3'b111:begincode<=code8;enable<=8'b10000000;end endcaseendalways@(posedge clock)begincase(code)4'b0000:discode<=8'b00111111;4'b0001:discode<=8'b00000110;4'b0010:discode<=8'b01011011;4'b0011:discode<=8'b01001111;4'b0100:discode<=8'b01100110;4'b0101:discode<=8'b01101101;4'b0110:discode<=8'b01111101;4'b0111:discode<=8'b00000111;4'b1000:discode<=8'b01111111;4'b1001:discode<=8'b01101111;default discode<=8'b00000000;endcaseendendmodule8位显示module seg_8(code,discode);input [3:0] code;output[7:0] discode;reg[7:0] discode;always@(code) begincase(code)4'b0000:discode<=8'b00111111;4'b0001:discode<=8'b00000110;4'b0010:discode<=8'b01011011;4'b0011:discode<=8'b01001111;4'b0100:discode<=8'b01100110;4'b0101:discode<=8'b01101101;4'b0110:discode<=8'b01111100;4'b0111:discode<=8'b00000111;4'b1000:discode<=8'b01111111;4'b1001:discode<=8'b01100111; default discode<=8'b00000000; endcaseendendmodule50分频module fredevider50(clockin,clockout); input clockin;output clockout;reg[5:0] count;reg clockout;parameter N=24;always@(posedge clockin)beginif(count==N)begincount<=6'b000000;clockout<=~clockout;endelse count<=count+6'b000001;endendmodule按一下一个灯亮,共4个灯module fsm (clock, reset,Q,K);input clock, reset,K;output Q;reg[1:0]countnum;reg [3:0] state;reg [3:0] Q;parameter s0 = 4'b0000,s1 = 4'b0001,s2 = 4'b0010,s3 = 4'b0011; always@(negedge K)countnum<=countnum+1; always @(posedge clock)if (!reset)beginQ <= 4'b1110;state <= s0;endelsecase (state)s0: if (countnum==1)beginstate <= s1;Q <= 4'b1101;endelse state <= s0;s1: if (countnum==2)begin state <= s2;Q <=4'b1011;endelse state <= s1;s2: if (countnum==3)beginQ <= 4'b0111;state <= s3;endelse state <= s2;s3: if (countnum==0)beginstate <=s0;Q <= 4'b1110;endelse state <= s3;default: state <= s0;endcaseendmodule四个状态(实验)module led16(clk,rst,key,led);input clk,rst,key;output [7:0]led;reg [7:0]led;reg [3:0]ledstate;reg [3:0]state;reg [1:0]count;parameters0=4'b0001,s1=4'b0010,s2=4'b0100,s3=4'b1000;always@(negedge key)count<=count+1'b1;always@(posedge clk)beginif(!rst)beginstate<=s0;ledstate<=4'd0;//1111_1111endelsebegincase(state)s0:beginif(count==1)begin state<=s1;ledstate<=4'd1;//1111_1110endelsebegin state<=s0;ledstate<=4'd0;//1111_1111endends1:beginif(count==2)begin state<=s2;ledstate<=4'd8;//0111_1111endelsebegin state<=s1;ledstate<=ledstate+1'b1;endends2:beginif(count==3)begin state<=s3;ledstate<=4'd15;//0000_0000endelsebegin state<=s2;ledstate<=ledstate-1'b1;endends3:beginif(count==0)begin state<=s0;ledstate<=4'd0;//1111_1111endelsebegin state<=s3;ledstate<=~ledstate;//qu fanendenddefaultbeginstate<=s0;ledstate<=4'd0;endendcaseendendalways @(posedge clk)begincase(ledstate)4'd0:led<=8'b1111_1111;4'd1:led<=8'b1111_1110;4'd2:led<=8'b1111_1101;4'd3:led<=8'b1111_1011;4'd4:led<=8'b1111_0111;4'd5:led<=8'b1110_1111;4'd6:led<=8'b1101_1111;4'd7:led<=8'b1011_1111;4'd8:led<=8'b0111_1111;4'd15:led<=8'b0000_0000;default led<=8'b1111_1111;endcaseendendmodule计数器(5)module count5 (reset,clk,cout);input clk,reset; output wire cout;reg[2:0] m,n;reg cout1,cout2;assign cout=cout1|cout2;always @(posedge clk)beginif(!reset) begin cout1<=0; m<=0; endelse begin if(m==4) m<=0; else m<=m+1;if(m<2) cout1<=1; else cout1<=0; endendalways @(negedge clk)beginif(!reset) begin cout2<=0; n<=0; endelse begin if(n==4) n<=0; else n<=n+1;if(n<2) cout2<=1; else cout2<=0; endendendmodule 32进制计数器modulecount60(clock,rst,countnum,data1,data2,); input clock,rst;output[4:0]countnum;output[3:0]data1,data2;reg[4:0]countnum;always@(posedge clock)beginif(!rst)countnum<=5'b00000;elsebeginif(countnum==31)countnum<=5'b00000;else countnum<=countnum+1'b1;endendassign data2=countnum/10;assign data1=countnum%10; endmodule。
控制信号电路的原理

控制信号电路的原理控制信号电路(Control signal circuit)是一种基础电子电路,用于控制电子系统和设备的工作状态、功能和操作。
它包括信号输入、信号处理和信号输出三个主要部分。
控制信号电路的原理主要涉及信号输入的采集、处理和放大,信号的传输和转换,以及信号输出的驱动和控制。
下面将从这几个方面详细介绍控制信号电路的原理。
1. 信号输入的采集:控制信号电路通常需要从外部或其他设备获取信号。
常见的信号输入方式包括按钮、开关、传感器等。
按钮和开关可以通过触点的闭合和断开实现控制信号的输入,传感器则通过感知外部环境的变化,并将其转换为电信号输入到控制信号电路中。
在采集信号的过程中,可能会涉及到去噪、滤波等处理,以提高信号的质量和稳定性。
2. 信号处理的放大和转换:控制信号电路需要对输入信号进行放大和转换,以适应后续的处理和操作。
信号放大主要是为了增加信号的幅度,使其能够驱动后续的电路和设备。
信号转换则是将信号进行合适的转换,以实现不同波形、幅度或频率的信号输出。
常见的信号处理电路包括放大电路、滤波电路、模数转换电路等。
3. 信号的传输和转换:当信号处理完成后,需要将信号传输到指定的位置或设备。
信号传输主要包括信号的导线连接和传输介质的选择。
信号的导线连接需要注意信号的传输距离、传输速度和抗干扰能力。
对于长距离传输或要求更高的抗干扰性能,可以使用差分信号传输、光纤传输等技术来提高信号的传输质量。
在信号传输过程中,还可能需要进行信号转换,例如将模拟信号转换成数字信号,或者将信号进行编码和解码。
4. 信号输出的驱动和控制:信号输出是控制信号电路的最终目的,它通过驱动电路将控制信号转化为对外部设备或系统的指令。
驱动电路的类型和复杂程度取决于被控制设备的要求和特性。
常见的驱动电路包括电磁继电器驱动电路、功率放大电路、可编程逻辑器件(FPGA)等。
在信号输出过程中,可能还需要进行逻辑判断和控制,例如使用微处理器或微控制器来实现复杂的控制逻辑。
交通信号灯控制电路设计
交通信号灯控制电路设计交通信号灯是城市交通管理中不可或缺的一部分,它可以保障车辆和行人的交通安全。
在交通信号灯控制电路设计中,我们需要考虑信号灯的正常运行、灯光的亮灭以及交通流量的感应和控制等因素。
下面是一个基于自动感应和定时控制的交通信号灯控制电路设计。
1.电路组成这个交通信号灯控制电路包含以下几个主要部分:-交通流量感应电路-控制信号产生电路-信号灯控制电路-定时控制电路-电源电路2.交通流量感应电路交通流量感应电路可以使用红外传感器或车辆感应线圈来感应车辆和行人的交通流量。
红外传感器可以通过感应物体的红外辐射来检测车辆和行人的存在,而车辆感应线圈则可以感应到车辆经过时的电磁信号。
这些感应器将被放置在交通信号灯附近,以感知交通情况。
3.控制信号产生电路交通信号灯通常需要红、绿、黄三种不同的灯光亮灭组合。
控制信号产生电路可以根据交通流量感应电路的反馈信号产生相应的控制信号。
当感应到车辆或行人时,控制信号产生电路将产生相应的控制信号,以便控制信号灯的亮灭。
4.信号灯控制电路信号灯控制电路接收控制信号,并控制信号灯的亮灭。
在交通信号灯中,红灯通常用于停车,绿灯用于通行,黄灯用于警示。
信号灯控制电路通过控制交通信号灯的亮灭,实现交通流量的有序推进。
5.定时控制电路除了根据交通流量感应来控制信号灯的切换外,定时控制电路也是交通信号灯控制电路中的重要部分。
定时控制电路可以设置每个信号灯的时间段,以确保交通流量的平衡和有序。
6.电源电路为了确保交通信号灯能够正常工作,需要一个稳定的电源电路来为整个控制电路系统供电。
电源电路可以使用交流电源或直流电源,具体根据实际应用环境来选择。
综上所述,一个完整的交通信号灯控制电路设计包括交通流量感应电路、控制信号产生电路、信号灯控制电路、定时控制电路和电源电路。
这个设计可以根据交通流量和定时设置来控制信号灯的亮灭,以确保交通的安全和有序。
在实际的应用中,还可以结合传感器和无线通信技术来实现更智能的交通信号灯控制系统。
交通信号灯自动控制电路设计

交通信号灯自动控制电路设计交通信号灯是城市交通运行过程中不可或缺的一部分,起到了调节道路交通、保障行车安全的重要作用。
而现代交通信号灯的自动化控制则是为了更有效地管理道路交通,减少人为干预,降低事故风险,提高道路通行效率。
本文将介绍一种基于电路的交通信号灯自动控制方案,以及其设计原理和实现方法。
一、设计原理该交通信号灯自动控制电路的原理是基于红绿灯自动间隔控制的思路,通过控制不同灯的亮灭时间,实现道路交通的自动化调度。
其大致思路如下:1. 接受外部信号该电路首先要能够感知道路交通状态的变化,通常是通过测量车流量、等待时间等来实现。
当测量仪器感测到车流量较大,或等待时间较长时,将会发送信号给电路,告知其需要改变信号灯的显示状态。
2. 控制信号灯显示根据接收到的信号,电路将会对信号灯进行控制。
一般的控制方法是使用定时器来控制不同信号灯亮灭的时间,比如:红灯亮20秒,黄灯闪烁5秒,绿灯亮35秒等。
3. 循环控制定时器控制完一个周期时间后,电路将自动回到初始状态,继续循环控制信号灯。
在实际设计时,循环的周期时间应根据实际道路交通情况进行调整,以保证交通信号灯的控制效果最优。
二、电路设计根据上述的交通信号灯自动控制原理,我们可以设计出一个基于555定时器和CMOS数字集成电路的电路板。
整个电路板的设计可以分为信号输入模块、定时器控制模块和信号输出模块三个部分。
1. 信号输入模块信号输入模块用来感知道路交通状态的变化,通常是通过测量车流量、等待时间等来实现。
这个模块的设计比较简单,只需要将传感器与电路板的输入端口相连接即可。
2. 定时器控制模块定时器控制模块是整个电路板的最核心部分,主要用来控制信号灯的亮灭时间。
该模块包括两个部分:555定时器模块和CMOS数字集成电路模块。
(1)555定时器模块555定时器模块主要用来产生不同周期的脉冲信号。
这个模块采用了比较经典的三声器结构,通过调整不同的电容器和电阻器,可以产生不同频率的脉冲信号。
光耦脉冲信号隔离传输与控制电路

光耦脉冲信号隔离传输与控制电路
首先,光耦脉冲信号隔离传输与控制电路的基本原理是利用光耦隔离器将输入信号转换成光信号,然后通过光电转换器将光信号转换回电信号输出。
这样可以实现输入端和输出端的电气隔离,避免了因接地干扰或电压浮动而引起的干扰和损坏。
这种隔离传输方式有效地提高了系统的稳定性和可靠性。
其次,光耦脉冲信号隔离传输与控制电路在工业控制领域有着广泛的应用。
例如,在工业自动化控制系统中,传感器采集的信号需要传输到PLC或其他控制设备进行处理,而传感器和控制设备之间往往存在较大的电气隔离距离,这时就需要使用光耦隔离器进行信号隔离传输。
这种电路可以有效地解决工业现场电磁干扰、地电位差等问题,保证了控制系统的稳定性和可靠性。
此外,光耦脉冲信号隔离传输与控制电路还可以应用于通信系统中。
在通信设备中,由于地电位差、电磁干扰等因素,往往需要对输入输出信号进行隔离处理,以保证通信质量和设备安全。
光耦隔离器可以提供高速、高带宽的信号隔离传输,适用于各种通信设备和场合。
总的来说,光耦脉冲信号隔离传输与控制电路是一种重要的电子电路,它通过光耦隔离器实现了输入输出信号的电气隔离传输和控制,广泛应用于工业控制、通信系统等领域,对于提高系统稳定性和可靠性起到了重要作用。
希望这个回答能够满足你的需求。
控制电路原理
控制电路原理1. 控制电路的概述控制电路是一种用于自动控制和监控电气或机械系统的电路。
它可以将传感器和执行器提供的信号转换为适当的控制信号来控制和监控系统的运行。
控制电路应用广泛,包括家庭和商业建筑、工业自动化和过程控制等领域。
控制电路通常由控制器和执行器组成,其中控制器负责根据传感器提供的信息生成适当的控制信号,而执行器则负责实际控制系统的运行。
传感器可以探测诸如压力、温度、湿度等物理量,执行器可以控制诸如阀门、电机、灯等设备。
2. 控制电路的分类控制电路可以按照不同的标准来分类,例如根据控制信号的类型、控制器的结构和执行器的类型等。
以下是一些常见的分类方式。
2.1 按照控制信号类型分类控制电路可以按照控制信号的类型来分类。
最常见的类型是模拟信号和数字信号:- 模拟信号是连续的变化信号,其值通常在一定区间内波动,例如电压、电流、温度等。
- 数字信号是离散的信号,其值只有两种状态,例如开关、逻辑电平等。
2.2 按照控制器的结构分类控制器可以分为逻辑控制器和模拟控制器:- 逻辑控制器是基于逻辑门或微处理器的数字控制器,通常用于离散的、逻辑性的控制任务,例如逻辑电路和自动化控制等。
- 模拟控制器是基于模拟电路的控制器,以模拟信号为输入和输出,通常用于连续的过程控制,例如温度、压力和流量等。
2.3 按照执行器的类型分类执行器可以按照其类型来分类。
以下是一些常见的执行器:- 电动执行器,例如电机、电磁铁和电动阀门等。
- 气动执行器,例如气缸、气垫和气动阀门等。
- 液压执行器,例如液压缸和液压阀门等。
3. 控制电路的基本原理控制电路的基本原理是将传感器检测到的信号转换为控制信号,并通过执行器控制系统的运行。
以下是一些常见的控制电路原理。
3.1 反馈控制原理反馈控制原理是一种控制器以传感器检测到的值为输入,将控制信号输出给执行器的控制策略。
当传感器检测到系统的状态发生变化时,控制器会自动调整控制信号,使系统恢复到预定的状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(4)电路混线时,禁止出现乱显示。
2019/12/29
石家庄铁路运输学校
11
进站信号机
DJ
LUXJ
2DJ ZXJ LXJ
DZJ
UB
2
2
84
U
3 2DJ
2
LB
TXJ
L
H U YB
2019/12/29
HB
TXJ
2UB
1
ZXJ LXJF 2DJ
77
1 LUXJ
YBB
H
DJ LXJ
4
RD1 XJZ 0.5A 220
2019/12/29
HH
石家庄铁路运输学校
LXJ RD2 XJF 6 0.5A 220
19
进站信号机
电路分析
(1)DZJ的作用
DZJ动作说明相应信号灯泡住灯丝断丝。
(2)DJ的作用
DJ↓说明信号机灭灯。
2019/12/29
石家庄铁路运输学校
3
调车信号机
说明
XJZ、XJF:信号电源交流正极、负极 BAH:白蓝回线 XJ:信号继电器
办理好进路、满足信号开放的条件后,XJ↑
DJ:灯丝继电器
DJ↑说明正点亮灯光的灯丝完好。
2019/12/29
石家庄铁路运输学校
4
调车信号机
说明
RD:
熔断器
RD1 0.5A
X ZXJ 5
X LXJF 2
石家庄铁路运输学校
14
进站信号机
电路分析
(3)LUXJ :绿黄信号继电器;
用于有车场的车站,前方设有进路信号机时,进 站信号机设置LUJ。
用于区分绿黄灯和绿灯。 ZXJ励磁条件:建立正线接车进路、进站信号的
LXJ、ZXJ吸起,同时建立了正线发车进路。
20
进站信号机
DZJ
UB
U
LB
L
HB
H
DJ LXJ
4
RD1 XJZ 0.5A 220
2019/12/29
LUH HH
石家庄铁路运输学校
LXJ
RD2 XJF
6 0.5A 220
21
进站信号机
电路分析
(3)LXJ的作用
区分信号的开放状态和关闭状态。
问题:
为什么电源正极、负极处分别使用LXJ的第4和第 6组接点?
1
1
1
1
1
1
2019/12/29
石家庄铁路运输学校
13
进站信号机
电路分析
(2)TXJ:通过信号继电器
用于区分黄灯和绿灯。 TXJ励磁条件:建立正线接车进路、进站信号的
LXJ、ZXJ吸起,同时建立了正线发车进路。
LUXJ
若有进路信号机,连接其开放条件
TXJ
X1 LXJF
1
2019/12/29
石家庄铁路运输学校
8
进站信号机
显示
XD
JG
X D3
ⅠAG
D1
ⅡAG
S5
5G
7
D11
13 11
25
21
SⅢ
ⅢG
3
D9
D13
17
ⅠG
5
D7
9 15
23
D17
1
D5
1/19WG
D15
19
27
SⅡ
ⅡG
4G S4
2019/12/29
石家庄铁路运输学校
9
进站信号机
显示
XD
JG
X D3
ⅠAG
D1
ⅡAG
BB、AB:
白灯变压器、蓝灯变压器
XJZ 220 BB
XJF 220
2019/12/29
B
石家庄铁路运输学校
5
进站信号机
显示
2019/12/29
石家庄铁路运输学校
6
进站信号机
显示
XD
JG
X D3
ⅠAG
D1
ⅡAG
S5
5G
7
D11
13 11
25
21
SⅢ
ⅢG
3
D9
D13
17
ⅠG
5
D7
9 15
石家庄铁路运输学校
LXJ RD2
XJF
6 0.5A
22106
进站信号机
电路分析
(5)DJ :灯丝继电器; 2DJ :二灯丝继电器
用于监督正点亮灯光灯丝完整。 注意区分与DZJ不同。
问题:DJ落下说明相应信号机处于什么状态?
2019/12/29
石家庄铁路运输学校
17
进站信号机
电路分析
2019/12/29
石家庄铁路运输学校
15
进站信号机
电路分析
(4)DZJ:灯丝转换继电器
每个双灯丝灯泡配备一个。
灯光点亮时,主灯丝断丝后,自动切换至副灯丝。
列车信号采用双灯丝灯泡,重要信号机另设主灯丝报
警电路。
DZJ
DJ LXJ
RD1
XJZ
4
0.5A 220
HB
H
2019/12/29
参考教材P57。
2019/12/29
石家庄铁路运输学校
22
进站信号机
DZJ
UB
U
DJ LXJ
4
RD1 XJZ 0.5A 220
LB
L
HB
H
LXJF 2DJ
RD1 XJZ
2UB
7
0.5A 220
U
YB
2019/12/29
YBB
YBH
LUH HH
6 石家庄铁路运输学校 YXJ
LXJ
(6)LXJ :列车信号继电器
(办理好列车进路后吸起)
(7)LXJF :列车信号继电器复示继电器
与LXJ动作一致,作为LXJ接点的补充。
FKJ 3
KJ
11线
KF
LKJF
DJ
LXF
LXJ
4
1 4 XJJ LKJ QJ
2
1
3
4
4
4
2019/12/29
石家庄铁路运输学校
18
进站信号机
HB
LXJ LUH
HH
6
YBH
6 石家庄铁路运输学校 YXJ
RD1 XJZ 0.5A 220
RD1 XJZ 0.5A 220
RD2 XJF 0.5A 220
12
进站信号机
电路分析
(1)ZXJ:正线继电器
有关道岔开通正线时,ZXJ励磁。 用于区分一个黄灯和两个黄灯显示。
X ZXJ
5/7DBJF 1/3DBJF 9/11DBJF 13/15DBJF 17/19DBJF 23/25DBJF
S5
5G
7
D11
13 11
25
21
SⅢ
ⅢG
3
D9
D13
17
ⅠG
5
D7
9 15
23
D17
1
D5
1/19WG
D15
19
27
SⅡ
ⅡG
4G S4
2019/12/29
石家庄铁路运输学校
10
进站信号机
点灯电路要求
(1)点灯电路断线要灭灯。 (2)允许灯光灭灯时,信号应降级显示。 (3)禁
1/19WG
D15
19
27
SⅡ
ⅡG
4G S4
2019/12/29
石家庄铁路运输学校
7
进站信号机
显示
XD
JG
X D3
ⅠAG
D1
ⅡAG
S5
5G
7
D11
13 11
25
21
SⅢ
ⅢG
3
D9
D13
17
ⅠG
5
D7
9 15
23
D17
1
D5
1/19WG
D15
19
27
SⅡ
ⅡG
4G S4
2019/12/29
铁路信号基础
信号机点灯电路
2019/12/29
石家庄铁路运输学校
1
调车信号机
显示
只有蓝色和白色显示。
2019/12/29
石家庄铁路运输学校
2
调车信号机
XJZ 220
控制电路 RD1 0.5A
DJ 6
XJ
BB
AB
XJF 220 RD2 0.5A
BAH
B
A
2019/12/29
石家庄铁路运输学校