西门子运动控制器SIMOTION收放卷应用的介绍
西门子PLC-SIM使用说明

计算机仿真技术把现代仿真技术与计算机发展结合起来,通过建立系统的数学模型,以计算机为工具,以数值计算为手段,对存在的或设想中的系统进行实验研究。
随着计算机技术的高速发展,仿真技术在自动控制、电气传动、机械制造等工程技术领域也得到了广泛应用。
与传统的经验方法相比,计算机仿真的优点是:(1) 能提供整个计算机域内所有有关变量完整详尽的数据;(2) 可预测某特定工艺的变化过程和最终结果,使人们对过程变化规律有深入的了解;(3) 在测量方法有困难情况下是唯一的研究方法。
此外,数字仿真还具有高效率、高精度等优点。
大型企业每年都需要对电气控制人员进行技术培训,每次培训都需要大量的准备工作,购买大量各种不同类型PLC、变频器、接触器、电缆等。
如果采用传统的经验方法:购买大量的控制器件,特别PLC、变频器等器件昂贵,很容易造成浪费;此外需要专门的培训地点。
所以,如果对控制人员进行技术培训能够采用计算机仿真技术,能极大地降低成本。
S7-PLCSIM Simulating Modules由西门子公司推出,可以替代西门子硬件PLC的仿真软件,当培训人员设计好控制程序后,无须PLC硬件支持,可以直接调用仿真软件来验证。
2 S7-PLCSIM软件的功能(1) 模拟PLC的寄存器。
可以模拟512个计时器(T0-T511);可以模拟131072位(二进制)M寄存器;可以模拟131072位I/O寄存器;可以模拟4095个数据块;2048个功能块(FBs)和功能(FCs);本地数据堆栈64K字节;66 个系统功能块(SFB0-SFB65);128个系统功能(SFC0-SFB127);123个组织块(OB0-OB122)。
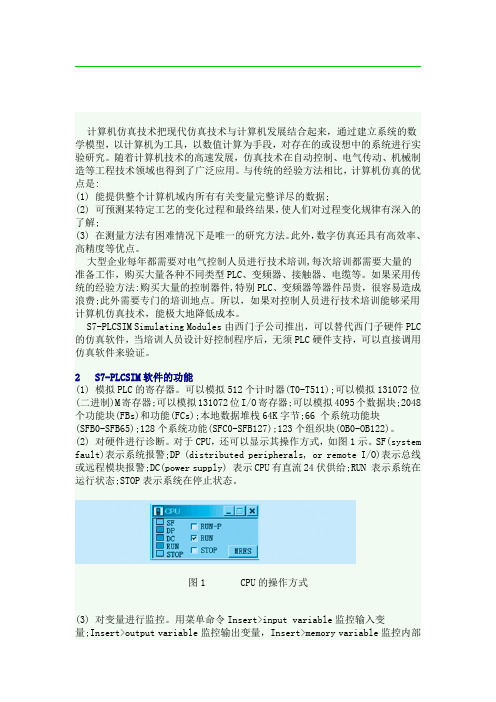
(2) 对硬件进行诊断。
对于CPU,还可以显示其操作方式,如图1示。
SF(system fault)表示系统报警;DP (distributed peripherals, or remote I/O)表示总线或远程模块报警;DC(power supply) 表示CPU有直流24伏供给;RUN 表示系统在运行状态;STOP表示系统在停止状态。
西门子运动控制器SIMOTION收放卷应用介绍

SIMOTION D Winder 包应用介绍
于长波
摘要:SIMOTION提供了一个可以应用于大部分开卷曲功能的应用包,其中包含了多种控制方式,多种卷径计算方法以及张力锥度、断带检测等功能。
但全面的同时带来了应用结构复杂、参数众多等问题。
本文根据以往的调试经验对Winder包的应用进行一下应用介绍,分为卷曲的基本原理、控制方式、程序结构、应用步骤四个部分。
关键词:SIMOTION 开卷曲
1 .开卷曲的基本原理
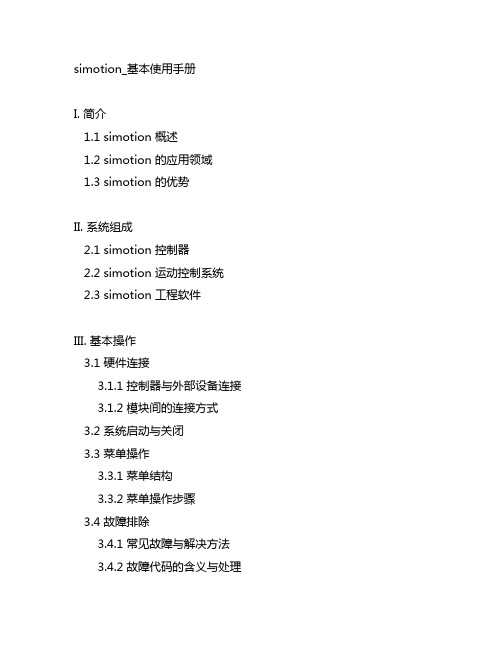
开卷曲的控制要求可以概括为通过控制电机的转矩来控制材料上的张力,使张力不变或按照一定的曲线减小(即张力锥度)。
从电机转矩到材料张力,这之间存在以下影响因素。
首先就是卷径,这是开卷曲控制最重要的一个参数,对其要求就是“稳”和“准”。
卷径计算可以大致分为速比法、厚度累积法和外部测量法。
simotion_基本使用手册
simotion_基本使用手册I. 简介1.1 simotion 概述1.2 simotion 的应用领域1.3 simotion 的优势II. 系统组成2.1 simotion 控制器2.2 simotion 运动控制系统2.3 simotion 工程软件III. 基本操作3.1 硬件连接3.1.1 控制器与外部设备连接 3.1.2 模块间的连接方式3.2 系统启动与关闭3.3 菜单操作3.3.1 菜单结构3.3.2 菜单操作步骤3.4 故障排除3.4.1 常见故障与解决方法 3.4.2 故障代码的含义与处理IV. 编程基础4.1 编程环境介绍4.2 编程语言及其特点4.3 编程实例演练4.3.1 简单的运动控制程序编写 4.3.2 系统故障处理的程序编写 4.4 调试与测试4.4.1 程序调试的基本方法4.4.2 程序测试的注意事项V. 运动控制5.1 运动控制原理5.2 运动控制参数设定5.3 运动控制程序设计5.3.1 位置控制程序设计5.3.2 速度控制程序设计5.4 运动学习与优化5.4.1 运动学习的方法5.4.2 运动优化的技巧VI. 系统维护6.1 系统备份与恢复6.1.1 控制器程序的备份方法6.1.2 系统参数的备份与恢复6.2 系统更新与升级6.3 系统性能监控6.3.1 系统各部分性能指标6.3.2 性能监控方法及工具VII. 故障处理7.1 硬件故障处理7.1.1 控制器故障处理7.1.2 模块故障处理7.2 软件故障处理7.2.1 程序故障处理7.2.2 系统故障处理VIII. 安全操作8.1 安全操作规程8.1.1 机器设备安全操作规程8.1.2 simotion 控制系统安全操作规程 8.2 应急处理8.2.1 突发情况的处理步骤8.2.2 安全设备的使用与保养IX. 使用注意事项9.1 温度与湿度要求9.2 电源要求9.3 使用环境要求9.4 维护保养要点结语simotion 控制系统的使用教程至此结束。
simotion运动控制器手册

Simotion运动控制器手册序言一、什么是Simotion运动控制器?1. Simotion运动控制器是西门子公司生产的一款高性能运动控制器产品。
它集成了PLC、运动控制和NC技术,可以广泛应用于各种自动化设备中,包括数控机床、包装机械、激光加工设备等领域。
二、Simotion运动控制器的性能特点2. Simotion运动控制器具有高速、高精度、高稳定性的特点,能够满足复杂运动控制系统的需求。
它还具有灵活的可编程性和良好的人机界面,便于用户进行系统集成和调试。
三、Simotion运动控制器的产品系列和规格3. Simotion运动控制器产品系列包括:D4x5-2、D4x5-2 DP/PN、D4x5-2 PN、P350-2、P350-4、D445-2、D445-2 PN等型号,满足不同应用场景的需求。
其规格参数包括:CPU性能、内存容量、通信接口、输入/输出点数等。
四、Simotion运动控制器的应用范围4. Simotion运动控制器广泛应用于各种自动化设备中,包括:数控机床、包装机械、激光加工设备、注塑机械、印刷设备等领域。
五、Simotion运动控制器的系统架构和工作原理5. Simotion运动控制器的系统架构包括:CPU、运动控制模块、通信接口模块、输入/输出模块、电源模块等组成。
它的工作原理是基于PLC、运动控制和NC技术的协同工作,实现对多轴运动的精密控制。
六、Simotion运动控制器的编程和调试方法6. Simotion运动控制器的编程和调试方法涉及STEP7、STARTER工程师工具等软件评台,以及相应的编程语言、调试指令等内容。
用户可以根据实际需求选择合适的方法进行工程开发和调试。
七、Simotion运动控制器的维护和故障排除7. Simotion运动控制器的维护和故障排除涉及硬件维护、软件升级、故障诊断、备件更换等方面,用户需要按照相关操作规范和流程进行操作,确保系统稳定运行。
simotion drive-based 参数

Simotion是西门子公司推出的一种先进的驱动技术,该技术基于Simotion控制器和高性能驱动器相结合的设计理念,能够实现多种运动控制应用。
Simotion drive-based参数是指Simotion系统中用于配置和调节驱动器参数的一组参数集合,通过调整这些参数可以实现对驱动器的精细控制,从而满足不同应用场景的需求。
Simotion drive-based参数具有以下特点和功能:1.多轴控制:Simotion驱动器可以实现对多个轴的同步控制,通过调节参数可以灵活配置各个轴的运动特性,实现复杂的多轴协同运动。
2.精准定位:通过参数调节可以实现对驱动器的定位精度进行优化,满足高精度定位的应用需求。
3.速度控制:Simotion drive-based参数可以用于调节驱动器的速度控制参数,实现对驱动器速度的精细调节和控制。
4.加减速控制:通过调节参数可以实现对驱动器的加减速特性进行优化,实现平稳的运动控制过程。
5.负载特性调节:Simotion drive-based参数还可以用于调节驱动器的负载特性参数,实现对不同负载情况下的运动控制优化。
在实际应用中,Simotion drive-based参数的调节和配置是非常重要的,它直接影响到驱动器的性能和运动控制的效果。
合理的参数配置能够提高设备的运动精度和稳定性,降低能耗,延长设备寿命。
在进行Simotion drive-based参数的调节和配置时,需要注意以下几点:1.了解设备运动特性:在调节参数之前,需要对设备的运动特性进行充分的了解,包括负载情况、运动速度要求、精度要求等。
2.根据应用需求调节参数:不同的应用对驱动器的要求不同,需要根据实际应用需求合理调节参数,以满足应用的具体要求。
3.参数调节过程中的测试与验证:在对参数进行调节和配置之后,需要进行充分的测试和验证,确保参数的调节效果符合预期,并满足应用需求。
4.参数调节过程中的安全性和稳定性:在参数调节过程中,需要确保设备的安全性和稳定性,避免因参数调节导致设备运动失控或者损坏。
西门子运动控制系统.

生产机械制造行业的范例- SIMOTIONSIMOTION是一个全新的西门子运动控制系统,它是世界上第一款针对生产机械而设计的控制系统,将运动控制,逻辑控制及工艺控制功能集成于一身,为生产机械提供了完整的解决方案。
机械运动越来越复杂,对速度及精度的要求也越来越高。
SIMOTION面向的行业主要是包装机械,橡塑机械,锻压机械,纺织机械,以及其他生产机械领域,正是针对复杂运动控制而推出的全新运动控制系统。
SIMOTION运动控制系统:∙由一个系统来完成所有的运动控制任务∙适用于具有许多运动部件的机器SIMOTION系统具有三个组成部分∙工程开发系统工程开发系统可以实现由一个系统解决所有运动控制、逻辑及工艺控制的问题,并且它还能够提供所有必要的工具,从编程到参数设定,从测试调试到故障诊断。
∙实时软件模块这些模块提供了众多的运动控制及工艺控制功能。
针对某一特定的机器所需的功能,灵活地选择相关的模块。
∙硬件平台硬件平台是SIMOTION运动控制系统的基础。
使由工程开发系统所开发的且使用了实时软件模块的应用程序可以运行在不同的硬件平台上,用户可以选择最适合自己机器的硬件平台。
SIMOTION的不同之处在于,可按任务层次划分的系统,具有灵活的功能,且使用同一种工程开发工具。
SIMOTION 运动控制系统可连接三种硬件平台,即:∙SIMOTION D-集成在驱动器中的紧凑型系统。
SIMOTION D的功能是集成在新的SINAMICS S120多轴驱动系统的控制模板上。
使之成为一个极其紧凑的拥有控制器及驱动器的系统。
将运动控制与驱动器功能集成在一起,使得系统具有极快的响应速度。
o典型应用领域根据其紧凑的设计,以及集成于驱动器上这一特点,SIMOTION D特别适用于:▪小型机械▪分布式自动化结构,例如拥有多轴的机器▪模块化设计的机器,也可以与SIMOTION P或SIMOTION C配合使用▪实时性要求极高的多轴耦合应用∙SIMOTION C -模块化与灵活性SIMOTION C230-2控制器是装配在S7-300机壳中。
西门子运动控制器SIMOTION收放卷应用介绍
SIMOTION D Winder 包应用介绍于长波摘要:SIMOTION提供了一个可以应用于大部分开卷曲功能的应用包,其中包含了多种控制方式,多种卷径计算方法以及张力锥度、断带检测等功能。
但全面的同时带来了应用结构复杂、参数众多等问题。
本文根据以往的调试经验对Winder包的应用进行一下应用介绍,分为卷曲的基本原理、控制方式、程序结构、应用步骤四个部分。
关键词:SIMOTION 开卷曲1 .开卷曲的基本原理开卷曲的控制要求可以概括为通过控制电机的转矩来控制材料上的张力,使张力不变或按照一定的曲线减小(即张力锥度)。
从电机转矩到材料张力,这之间存在以下影响因素。
首先就是卷径,这是开卷曲控制最重要的一个参数,对其要求就是“稳”和“准”。
卷径计算可以大致分为速比法、厚度累积法和外部测量法。
速比法是检测同一时刻下卷轴的转速和材料的线速度,两者相除即得到直径,这种方法实时性好,但稳定性欠佳。
在此基础上衍生出积分法和位置计算法,两者就是将一定时间内卷轴的角度位移与材料的位移相除,然后按一定的斜坡输出。
区别在于积分法是用速度的积分得到角度位移和材料位移,而位置计算法是直接取轴的位置值做计算。
这种方法稳定性好,实时性与直径计算的更新周期有关。
厚度累积法是根据卷轴的圈数和材料的厚度计算的一种方法,即卷轴每转一圈直径增加2倍的材料厚度,然后按照一定的斜坡输出。
这种方法稳定性非常好,但准确性与材料厚度的准确性有很大关系,这里所说的材料厚度并不是指材料本身的实际厚度,而是材料的实际厚度加上材料之间缝隙的厚度,即与松紧度有关。
外部测量法就是用传感器直接测量卷轴的实际直径,可分为接触式和非接触式,常见的接触式传感器有编码器和位移传感器,非接触测量传感器有激光、微波等。
由于测量数值与实际的直径可能是非线性的,所以要对测量值做非线性处理。
其次是对转矩的补偿,主要是加减速补偿和摩擦补偿。
加减速补偿指的是当材料在加速或减速时电机要提供额外的转矩对卷轴进行加减速,其大小与开卷曲机械系统的转动惯量和加减速度有关;其方向与工作方式(是开卷还是收卷)和出料方向(材料是在卷轴的上方还是下方)有关。
simotion 工艺对象-概述说明以及解释
simotion 工艺对象-概述说明以及解释1.引言1.1 概述概述工艺对象是指在工业生产中通过一系列动作、步骤和操作来完成特定任务的物体或系统。
它们通常是由设备、机器或自动化系统组成,被用于执行各种工艺过程,如生产、加工、装配和包装等。
随着工业技术的不断发展和进步,工艺对象的应用范围也越来越广泛,对于提高生产效率和质量具有重要意义。
在工艺对象中,确保各个组成部分协调运行并实现预期目标是至关重要的。
为了实现这一目标,许多先进的自动化技术被应用于工艺对象中。
其中一种重要的技术就是simotion。
simotion是西门子公司开发的一种先进的运动控制技术。
它结合了先进的硬件和软件组件,具有高度可靠性和灵活性。
simotion可以被广泛应用于各种工业场景中,尤其适用于那些对精确运动控制和高效生产要求较高的工艺对象。
本文将会介绍工艺对象的定义,探讨simotion技术的基本原理和特点,以及讨论simotion在工艺对象中的应用。
此外,我们还将总结工艺对象在生产中的重要性,以及simotion在工艺对象中的应用优势。
最后,我们将展望工艺对象未来的发展趋势,预测其在工业生产中的前景。
通过本文的阅读,读者将对工艺对象的概念有更深入的理解,了解simotion技术的基本原理和应用场景,以及认识到工艺对象在提高生产效率和质量中的重要作用。
希望本文能对读者加深对工艺对象和simotion 技术的认识,并为相关领域的研究和应用提供有益的参考。
1.2 文章结构文章结构部分:文章的结构分为以下几个部分:1. 引言:这一部分对simotion工艺对象的引言进行概述,包括对simotion技术的简要介绍以及文章结构的概述。
2. 正文:这一部分主要分为两个小节,分别是工艺对象的定义和simotion技术介绍。
2.1 工艺对象的定义:在这一小节中,将对工艺对象进行详细的定义和解释。
包括工艺对象的概念、特点和内涵,以及工艺对象在现代工业中的重要性和应用场景。
西门子Simotion运动控制器在普通卧式镗床中的应用

计 了 四种 加工 循环 : 面循 环 、 铣 阵列孔 加工循 环 、 圆周 孔加 工循 环 、 自定义孔 系加工循 环 。下 面 以阵列孔 加
r 4Ax s Ge r to 1 6 iX aRai 0
_
工循 环为例作简单说 明。 阵列孔加工循环 可以对 规则阵列状 排布孔系进 行 钻孔 、 镗孔 、 L 攻丝等不 同加工操作 , 功能类似 于 啄孑 、 其 数控 系统 中的固定 加 工循 环 , 对 于规则 排布 背景 下 但 的某 些特别点 , 以用更灵 活 的方式进 行 处理 ( : 可 例 修
数控 ・ 数显——西 门子 S t n运动控制器在普通卧式镗床中的应用 i i moo
机床电器 2 1 . 023
西 门子 Sm t n运 动控 制器 在 普 通 卧式镗 床 中的应 用 i oo i
邓开楠 , 宏岩 。 高 徐一楠 ( 阳机 床股份 有 限公 司中捷钻 镗床 厂 ,112 沈 104 )
i o m o o i o a r ng m a hi e nc m n h r z nt lbo i c n
DENG i—n n.GAO n Ka a Ho g—y n.XU a Yi—I n l a
( h n agMahn ol o ,t hn S eyn c ieT o C . LdC ia—C ehs v ka rl gadB r gMahn rs 10 4 ) zc ol a i D ln n o n c ieWok ,1 12 o n ii i
Ab t a t T i p p rp e e t t e a p iain o ime s S mo in mo e n o t l r n ta i o a o z n a b r g sr c : h s a e r s n s h p l t fS e n i t v me tc n r l ' i rd t n lh r o tl o n c o o oes i i i ma h n .I h a eo c a im r me o k i o h n e ,t e s i d e u e c i e n te c s fme h n s fa w r s n t a g d h pn l s s ̄e u n y c n e e o tolrmo ua in i — c q e c o v  ̄ rc n rl d lt n e o s a ft d t n c a ia e rv lc t d lt n te f e x su e h ls d lo e v e h oo y o t e ma hn t d o a i o a me h nc g a eo i mo u a i h e d a i s st e co e o p s ro t c n lg .S h c i e e r i l l y o c n r aie e a t on —t a e z x c i t o— p i tpn on i g l p on i p i t ,ma y k n s o u o t r c s i g c ce f n t n T r u h t e a p ia in n n i d fa tmai p o e s y l u ci . h o g h p l t c n o c o a v n e t n c n r ltc n l g ,t e ta i o a oio t lb rn c i e i u d t d a hg r cso ,lw o e o — d a c d mo i o to e h oo o y h r d t n lh rz n a o g ma hn s p a e ih p e ii n o p w r c n i i s mp i n af uo t c i e t o. u t ,h l —a tma i ma h n o 1 o c Ke r s S mo in;mo e n o to ;i r v me t fh r o tlb r g ma h n y wo d : i t o v me t n r l mp o e n o z na o i c i e c o i n
西门子运动控制器SIMOTION收放卷应用的介绍

SIMOTION D Winder 包应用介绍于长波摘要:SIMOTION提供了一个可以应用于大部分开卷曲功能的应用包,其中包含了多种控制方式,多种卷径计算方法以及力锥度、断带检测等功能。
但全面的同时带来了应用结构复杂、参数众多等问题。
本文根据以往的调试经验对Winder包的应用进行一下应用介绍,分为卷曲的基本原理、控制方式、程序结构、应用步骤四个部分。
关键词:SIMOTION 开卷曲1 .开卷曲的基本原理开卷曲的控制要求可以概括为通过控制电机的转矩来控制材料上的力,使力不变或按照一定的曲线减小(即力锥度)。
从电机转矩到材料力,这之间存在以下影响因素。
首先就是卷径,这是开卷曲控制最重要的一个参数,对其要求就是“稳”和“准”。
卷径计算可以大致分为速比法、厚度累积法和外部测量法。
速比法是检测同一时刻下卷轴的转速和材料的线速度,两者相除即得到直径,这种方法实时性好,但稳定性欠佳。
在此基础上衍生出积分法和位置计算法,两者就是将一定时间卷轴的角度位移与材料的位移相除,然后按一定的斜坡输出。
区别在于积分法是用速度的积分得到角度位移和材料位移,而位置计算法是直接取轴的位置值做计算。
这种方法稳定性好,实时性与直径计算的更新周期有关。
厚度累积法是根据卷轴的圈数和材料的厚度计算的一种方法,即卷轴每转一圈直径增加2倍的材料厚度,然后按照一定的斜坡输出。
这种方法稳定性非常好,但准确性与材料厚度的准确性有很大关系,这里所说的材料厚度并不是指材料本身的实际厚度,而是材料的实际厚度加上材料之间缝隙的厚度,即与松紧度有关。
外部测量法就是用传感器直接测量卷轴的实际直径,可分为接触式和非接触式,常见的接触式传感器有编码器和位移传感器,非接触测量传感器有激光、微波等。
由于测量数值与实际的直径可能是非线性的,所以要对测量值做非线性处理。
其次是对转矩的补偿,主要是加减速补偿和摩擦补偿。
加减速补偿指的是当材料在加速或减速时电机要提供额外的转矩对卷轴进行加减速,其大小与开卷曲机械系统的转动惯量和加减速度有关;其方向与工作方式(是开卷还是收卷)和出料方向(材料是在卷轴的上方还是下方)有关。
西门子PLC-SIM使用说明
计算机仿真技术把现代仿真技术与计算机发展结合起来,通过建立系统的数学模型,以计算机为工具,以数值计算为手段,对存在的或设想中的系统进行实验研究。
随着计算机技术的高速发展,仿真技术在自动控制、电气传动、机械制造等工程技术领域也得到了广泛应用。
与传统的经验方法相比,计算机仿真的优点是:(1) 能提供整个计算机域内所有有关变量完整详尽的数据;(2) 可预测某特定工艺的变化过程和最终结果,使人们对过程变化规律有深入的了解;(3) 在测量方法有困难情况下是唯一的研究方法。
此外,数字仿真还具有高效率、高精度等优点。
大型企业每年都需要对电气控制人员进行技术培训,每次培训都需要大量的准备工作,购买大量各种不同类型PLC、变频器、接触器、电缆等。
如果采用传统的经验方法:购买大量的控制器件,特别PLC、变频器等器件昂贵,很容易造成浪费;此外需要专门的培训地点。
所以,如果对控制人员进行技术培训能够采用计算机仿真技术,能极大地降低成本。
S7-PLCSIM Simulating Modules由西门子公司推出,可以替代西门子硬件PLC 的仿真软件,当培训人员设计好控制程序后,无须PLC硬件支持,可以直接调用仿真软件来验证。
2 S7-PLCSIM软件的功能(1) 模拟PLC的寄存器。
可以模拟512个计时器(T0-T511);可以模拟131072位(二进制)M寄存器;可以模拟131072位I/O寄存器;可以模拟4095个数据块;2048个功能块(FBs)和功能(FCs);本地数据堆栈64K字节;66 个系统功能块(SFB0-SFB65);128个系统功能(SFC0-SFB127);123个组织块(OB0-OB122)。
(2) 对硬件进行诊断。
对于CPU,还可以显示其操作方式,如图1示。
SF(system fault)表示系统报警;DP (distributed peripherals, or remote I/O)表示总线或远程模块报警;DC(power supply) 表示CPU有直流24伏供给;RUN 表示系统在运行状态;STOP表示系统在停止状态。
SIMOTION_运动控制器精讲

Automation and Drives
技术数据
SIMOTION
介绍 系统 用户收益 典型应用 技术数据
SIMOTION D
外围设备
SCOUT 编程系统
运行系统 OPC 服务器
人机界面
连接现场总 线的驱动器
Folie 11
© SIEMENS AG 2002
Automation and Drives
PROFIBUS/ MPI
PROFIBUS/ MPI PROFIBUS/ PROFIdrive
&
Industrial Ethernet
&
Industrial Ethernet
PROFIBUS
© SIEMENS AG 2002
Folie 7
Automation and Drives
全集成自动化
SIMOTION
SIMOTION 集成多种组件的功能
SIMOTION
介绍 系统 用户收益 典型应用 技术数据
许多单个组件
一个统一系统
© SIEMENS AG 2002
Folie 6
Automation and Drives
通讯
SIMOTION
任务:
使用的协议
介绍 系统 用户收益 典型应用 技术数据
工程(Engineering) 人机接口(HMI) 驱动器(Drives) 输入/输出(I/O)
硬件平台
SIMOTION C, 类似SIMATIC S7-300 的 安装结构. SIMOTION P, 基于工业PC的结构. SIMOTION D,与驱动器集成在一起.
可升级的功能
定位 同步操作 凸轮 ...
运动控制系统 SIMOTION硬件平台简介及应用
SIMOTION D –基于变频器多轴控制功能集成在变频器中EnlargeSIMOTION D –基于变频器在我们的SIMOTION D 轴控制系统中,SIMOTION 功能直接集成在SINAMICS S120 变频器系统的控制模块中。
这种基于变频器的运动控制系统的优点是,它使得由控制器与变频器组成的整体系统明显更加紧凑,响应更加迅速。
另外,这种创新的多轴控制系统还在单轴或多轴控制系统中提供了极高的可扩展性和灵活性,具有多种型号,适用于各种各样的应用。
多轴控制解决方案优点一览∙将运动控制功能、工艺功能和PLC 功能直接集成到变频器中,从而显著降低成本∙设计紧凑,减小了控制柜的体积∙没有接口,因此响应速度极快典型应用建议将SIMOTION D 在需要满足以下多轴控制要求的任何应用中使用。
∙紧凑型机器∙分布式自动化设计,尤其是对于具有大量轴的机器∙模块化的机器–也可作为SIMOTION P 或SIMOTION C 的补充∙有着严格时间要求的耦合轴应用标签硬件平台,SIMOTION D,基于变频器的SIMOTION D,运动控制系统SIMOTION,SIMOTION,SIMOTION 运动控制系统SIMOTION C –基于控制器模块化且应用灵活SIMOTION C –基于控制器SIMOTION C 是一种具有S7-300 设计形式的运动控制器。
除了已集成的接口之外,也可对此控制器加以扩展以包括进SIMATIC S7-300 I/O 模块。
这些运动控制器分为两个型号:SIMOTION C240 和SIMOTION C240 PN这两个型号具有相同的PLC 和运动控制性能。
但是,它们配有不同的接口。
C240 包括 4 个内置接口,分别用于模拟、步进和液压驱动器。
C240 PN 配有一个PROFINET 接口,包括 3 个端口。
另外,这两种控制器都配有多个数字量输入和输出以及两个PROFIBUS 接口,包括PROFIdrive 和一个通讯用工业以太网接口。
西门子Simotion运动控制器介绍
分布输入/输出 模块
同步时钟
6,0 2 7,2 1 & 同步时钟
© SIEMENS AG 2002
伺服驱动器
伺服驱动器
分布式外设
)ROLH
SIM O TIO N
带多轴控制的机械
$XWRP DWLRQ DQG 'ULYHV
Ethernet
HM I
SIM O TIO N ES
Ethernet
分布式 外设
分布式 外设
© SIEMENS AG 2002
)ROLH 10
SIM O TIO N
SIMOTION 在一工厂
$XWRP DWLRQ DQG 'ULYHV
6,0 $7,& +0 ,
6,0 $7,& 6
统一的配置: 6WHS ,6&2 87,6,0 $7,& +0 ,, 驱动器调试
统一数据管理: 6,0 $7,& 6,6,0 2 7,2 1,6,0 $7,& +0 ,,驱动器数据
集中外设
352 ),%86 接口 (WKHUQHW接口 '5,9(-&/L4 接口
$XWRP DWLRQ DQG 'ULYHV
6,1$0 ,&6 2- 自带 (7 2000 /6/;,所有 352 ),%86 标准子站 ('3 90/91) 路输入,路输入/输出(自带) 额外的输入/输出模块可供选择 2, 12 0 ELW/V,同步时钟 2, Z LWK 100 0 ELW/V ,可连接下列模块 进线电源(电源模块) 功率单元 (电机模块) 外设,编码器
S7 FM 352 / 452
卷烟切丝设备中的SIMOTION电气控制技术

卷烟切丝设备中的SIMOTION电气控制技术烟草行业的竞争力度随着经济的发展日渐激烈,卷烟厂为了提高企业的竞争力度,谋求更加广阔的发展空间,需要不断加大对卷烟切丝设备的研究力度,通过性能更加优良的设备来提高烟丝质量。
电气控制是卷烟切丝设备运行的重要环节,当前卷烟切丝设备电力控制技术还有很多不足之处需要完善。
据此,对SIMOTION运动控制系统进行了简要介绍,分析了卷烟切丝设备的工作原理,并对卷烟切丝设备中的SIMOTION电气控制技术进行了讨论。
标签:卷烟切丝设备;SIMOTION电气控制技术;运动控制doi:10.19311/ki.1672-3198.2016.23.129传统卷烟切丝设备的电气控制技术比较落后,设备工作效率较低,容易出现传送误差现象,且维修难度较大,严重影响了烟丝质量,制约了卷烟厂的发展。
如何应用先进技术对卷烟切丝设备系统进行完善、对其工作性能进行改良,是卷烟厂在发展过程中必须解决的问题。
大量实践表明SIMOTION运动控制系统在提高卷烟切丝设备的精准性和工作效率方面具有明显优势,已经得到了广泛的应用。
1 SIMOTION运动控制系统介绍SIMOTION是一项具有综合性控制功能的西门子运行控制系统,该系统是由不同控制模块组成的,可以根据生产需要自由选择控制模块,完成对多个机械运动的同步控制。
利用SIMOTION运动控制系统可以对生产设备、生产流程以及生产工艺进行控制,贯穿整个生产过程,为生产机械提供了完整的解决方案。
科技的进步使得生产活动越来越复杂,这就对机械运动的高效性及准确性提出了更高的要求,利用SIMOTION运动控制系统可以实现对复杂机械的有效控制,在提高机械运动效率以及精准性方面起到了重要作用,已被广泛应用与多个领域中去。
2 卷烟切丝设备工作原理分析以SQ37X系类卷烟切丝机为例,对其工作原理进行分析。
切丝机的主要组成包括出料斗、磨刀器、刀辊体、刀门、压实器、排链以及进料装置等部件,在切丝机在通电之后,会驱动刀辊体进行运转,将进行切丝的烟叶会均匀分布进给;磨刀石在刀门控制作用下做旋转运动对切丝刀片进行打磨;烟叶通过进料装置进入到切丝机中,当烟叶量达到切丝标准时,便会在上下链条的带动下进入到压实器进行压实形成烟饼;然后烟饼在通过刀门之后便会被切丝刀片切割成烟丝,并从出料斗中输出,烟丝的宽度与预先设定的切丝刀片切割速度有关。
SIEMENS SMART 200的片材辐照收卷设备应用

张力控制程序模块,该模块负责控制片材辐照的片材张 力部分,使片材的张力控制在一个特定的值的附近,不会过 大或者过小。
1 可编程控制器
■■1.1 可编程控制器简介 可编程逻辑控制器(PLC), 它采用可编程的逻辑存储器 ,
用于其内部存储数据、程序 , 执行逻辑运算、逻辑控制、计 数、定时与数学运算等实际应用的指令 , 并通过数字或模拟 方式来控制不同类型的机械设备或生产过程 [1]。本论文主要 简述 PLC Smart 系列在片材辐照中的应用。 ■■1.2 PLC Smart 系列优势
* [2] 王国文 , 何清波 . 盲人智能导航拐杖 [J].ELECTRONICS WOR LD. 技术交流 ..2019.22.089:171-172.
* [3] 孙正阳 , 屈志峰 , 万宏强 . 多功能智能拐杖创新设计 [J]. 设计 研发 ..2020.14:17-18.
* [4] 陈辉 , 方良斌 . 基于 STC89C52 单片机对智能导盲拐杖的设 计 [J]. 科技创新 ..2018.6:19-19.
信息工程
的为专属的西门子软件 STEP 7‑Micro/WIN SMART 。
STEP 7‑Micro/WIN SMART 是该款专有的控制器 的组态、编程和操作软件。 通过该软件可以实现软件和 硬件的实际配合,真正做到 用户程序的植入。 ■■3.2 PLC 程序
如图 4 所示,是以片材 辐照收线部分为例,所分的 子程序模块分别为手动、转 图 4 子程序模块 速、张力、温度、报警、通讯等模块。
西门子运动控制器SIMOTION收放卷应用介绍
SIMOTION D Winder 包应用介绍于长波摘要:SIMOTION提供了一个可以应用于大部分开卷曲功能的应用包,其中包含了多种控制方式,多种卷径计算方法以及张力锥度、断带检测等功能。
但全面的同时带来了应用结构复杂、参数众多等问题。
本文根据以往的调试经验对Winder包的应用进行一下应用介绍,分为卷曲的基本原理、控制方式、程序结构、应用步骤四个部分。
关键词:SIMOTION 开卷曲1 .开卷曲的基本原理开卷曲的控制要求可以概括为通过控制电机的转矩来控制材料上的张力,使张力不变或按照一定的曲线减小(即张力锥度)。
从电机转矩到材料张力,这之间存在以下影响因素。
首先就是卷径,这是开卷曲控制最重要的一个参数,对其要求就是“稳”和“准”。
卷径计算可以大致分为速比法、厚度累积法和外部测量法。
速比法是检测同一时刻下卷轴的转速和材料的线速度,两者相除即得到直径,这种方法实时性好,但稳定性欠佳。
在此基础上衍生出积分法和位置计算法,两者就是将一定时间内卷轴的角度位移与材料的位移相除,然后按一定的斜坡输出。
区别在于积分法是用速度的积分得到角度位移和材料位移,而位置计算法是直接取轴的位置值做计算。
这种方法稳定性好,实时性与直径计算的更新周期有关。
厚度累积法是根据卷轴的圈数和材料的厚度计算的一种方法,即卷轴每转一圈直径增加2倍的材料厚度,然后按照一定的斜坡输出。
这种方法稳定性非常好,但准确性与材料厚度的准确性有很大关系,这里所说的材料厚度并不是指材料本身的实际厚度,而是材料的实际厚度加上材料之间缝隙的厚度,即与松紧度有关。
外部测量法就是用传感器直接测量卷轴的实际直径,可分为接触式和非接触式,常见的接触式传感器有编码器和位移传感器,非接触测量传感器有激光、微波等。
由于测量数值与实际的直径可能是非线性的,所以要对测量值做非线性处理。
其次是对转矩的补偿,主要是加减速补偿和摩擦补偿。
加减速补偿指的是当材料在加速或减速时电机要提供额外的转矩对卷轴进行加减速,其大小与开卷曲机械系统的转动惯量和加减速度有关;其方向与工作方式(是开卷还是收卷)和出料方向(材料是在卷轴的上方还是下方)有关。
西门子SimotionD425配置放法攻略
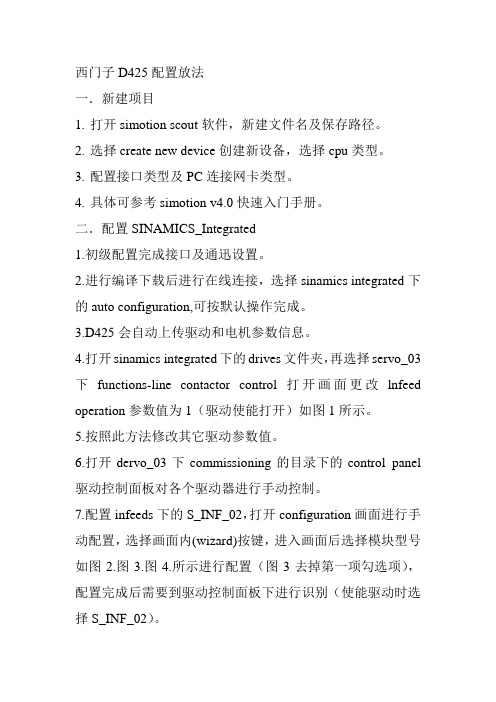
西门子D425配置放法一.新建项目1.打开simotion scout软件,新建文件名及保存路径。
2.选择create new device创建新设备,选择cpu类型。
3.配置接口类型及PC连接网卡类型。
4.具体可参考simotion v4.0快速入门手册。
二.配置SINAMICS_Integrated1.初级配置完成接口及通迅设置。
2.进行编译下载后进行在线连接,选择sinamics integrated下的auto configuration,可按默认操作完成。
3.D425会自动上传驱动和电机参数信息。
4.打开sinamics integrated下的drives文件夹,再选择servo_03下functions-line contactor control打开画面更改lnfeed operation参数值为1(驱动使能打开)如图1所示。
5.按照此方法修改其它驱动参数值。
6.打开dervo_03下commissioning的目录下的control panel 驱动控制面板对各个驱动器进行手动控制。
7.配置infeeds下的S_INF_02,打开configuration画面进行手动配置,选择画面内(wizard)按键,进入画面后选择模块型号如图2.图3.图4.所示进行配置(图3去掉第一项勾选项),配置完成后需要到驱动控制面板下进行识别(使能驱动时选择S_INF_02)。
图1图2图3图48.配置完成后编写S_INF_02的控制程序(如图5)。
9.把S_INF_02的控制程序添加到系统执行配置中(如图6)。
图5图610.配置各个驱动的报文(如图7),驱动配置完成。
图7三.配置轴1.选择insert axis添加轴一般按默认配置轴。
2.轴配置完成后可在控制面板里操作轴运动。
3.设置轴的机械配置(如图8)。
4.设置轴的默认手动速度、最大速度、最大加减速(如图9)。
5.设置轴的机械限位和软件限位(如图10)。
(最新整理)SIMOTION轴的回零功能

SIMOTION轴的回零功能编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(SIMOTION轴的回零功能)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为SIMOTION轴的回零功能的全部内容。
SIMOTION 轴的回零功能条目号:90719901日期:2014-05—08一、概述对于位置轴,输入及显示的相关位置是基于轴坐标系统的.轴的坐标系统必须与实际的机械坐标相一致.电机轴上的编码器通常可分为绝对值编码器及增量编码器两种类型.对于绝对值编码器,在轴运行前必须进行一次绝对值编码器的校正;对于增量编码器,必须通过执行回零运行来确定轴的机械零坐标。
可以通过编码器的零脉冲,外部零脉冲或零点开关+编码器的零脉冲的方法来实现.如果需建立直接的位置参考,可以激活同步实际值功能。
二、回零类型●主动回零(Active homing)对于此类型的回零,需完成一个指定的运动.通过配置可选择下述回零模式:– 通过零点开关及编码器零脉冲回零(output cam and encoder zero mark)– 仅通过外部零脉冲回零(external zero mark only)– 仅通过编码器零脉冲回零(encoder zero marker only)●被动回零(Passive homing/on—the—fly homing)此类回零发生在运动期间,此运动不是由回零命令产生的.通过配置可选择下述回零模式:– 通过零点开关及编码器零脉冲回零(output cam and encoder zero mark)– 仅通过外部零脉冲回零(external zero mark only)– 仅通过编码器零脉冲回零(encoder zero marker only)●直接回零(Direct homing/setting the home position)在无运动时设置轴的位置.●相对直接回零(Relative direct homing)在无运动时,轴的实际值通过一个指定的偏移量来进行偏移。
SIMOCODE功能概述及应用介绍juxi
二、与DCS 通讯位
2.1 Simocode DP –状态字
2.2 Simocode DP –控制字
2.3 Simocode Pro –状态字
2.4 Simocode Pro –控制字
三.SIMOCODE-DP系统功能概述:
1.SIMOCODE-DP-3UF5. (Siemens Motor Protection and Control Device with PROFIBUS-DP) 带PROFIBUS-DP接口的西门子电机保护及控制设 备。
SIMOCODE功能概述及应用介绍
ChenJuxi
一.MCC UNIT单元的组成部分 Simocode-DP (3UF5系列)
Simocode-Pro (3UF7系列)
1.1 Circuit Diagram with Safety Switch
1.2 Circuit Diagram with Local Start\stop
1.Win-SIMOCODE-DP/Smart是进行参数化,操作,诊断,及监测的软件, 安装在PC上,操作和维护人员可以通过该软件进行参数的修改、上传、下 载。还可以读到各种统计数据,如起动的次数,运行的时间等。 (注:若 要进行参数的下载,只能在SIMOCODE处于测试状态下)
2.MCC盘柜抽屉的位置指示: 红色位置:准备状态(主回路,控制回路均以送电) 兰色位置:测试状态(主回路断电,控制回路送电) 绿色位置:停止状态(主回路,控制回路均以断电)
7.运行和统计数据 SIMOCODE-DP提供了关于电机的大量运行和统计数据,可供用户进行观察 和诊断。
8.当前运行状态 SIMOCODE-DP不断传送当前运行状态,包括实际相电流(以设定电流%计) 开/关、逆时针/顺时针、快/慢、滑动断开、闭合、移动、警告、故障等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SIMOTION D Winder 包应用介绍于长波摘要:SIMOTION提供了一个可以应用于大部分开卷曲功能的应用包,其中包含了多种控制方式,多种卷径计算方法以及力锥度、断带检测等功能。
但全面的同时带来了应用结构复杂、参数众多等问题。
本文根据以往的调试经验对Winder包的应用进行一下应用介绍,分为卷曲的基本原理、控制方式、程序结构、应用步骤四个部分。
关键词:SIMOTION 开卷曲1 .开卷曲的基本原理开卷曲的控制要求可以概括为通过控制电机的转矩来控制材料上的力,使力不变或按照一定的曲线减小(即力锥度)。
从电机转矩到材料力,这之间存在以下影响因素。
首先就是卷径,这是开卷曲控制最重要的一个参数,对其要求就是“稳”和“准”。
卷径计算可以大致分为速比法、厚度累积法和外部测量法。
速比法是检测同一时刻下卷轴的转速和材料的线速度,两者相除即得到直径,这种方法实时性好,但稳定性欠佳。
在此基础上衍生出积分法和位置计算法,两者就是将一定时间卷轴的角度位移与材料的位移相除,然后按一定的斜坡输出。
区别在于积分法是用速度的积分得到角度位移和材料位移,而位置计算法是直接取轴的位置值做计算。
这种方法稳定性好,实时性与直径计算的更新周期有关。
厚度累积法是根据卷轴的圈数和材料的厚度计算的一种方法,即卷轴每转一圈直径增加2倍的材料厚度,然后按照一定的斜坡输出。
这种方法稳定性非常好,但准确性与材料厚度的准确性有很大关系,这里所说的材料厚度并不是指材料本身的实际厚度,而是材料的实际厚度加上材料之间缝隙的厚度,即与松紧度有关。
外部测量法就是用传感器直接测量卷轴的实际直径,可分为接触式和非接触式,常见的接触式传感器有编码器和位移传感器,非接触测量传感器有激光、微波等。
由于测量数值与实际的直径可能是非线性的,所以要对测量值做非线性处理。
其次是对转矩的补偿,主要是加减速补偿和摩擦补偿。
加减速补偿指的是当材料在加速或减速时电机要提供额外的转矩对卷轴进行加减速,其大小与开卷曲机械系统的转动惯量和加减速度有关;其方向与工作方式(是开卷还是收卷)和出料方向(材料是在卷轴的上方还是下方)有关。
机械系统的转动惯量包括电机的转动惯量、减速机的转动惯量、卷轴的转动惯量和材料的转动惯量,除了材料的转动惯量外其他对象的转动惯量在工作过程中是不变的,我们可以称为固定的转动惯量。
材料的转动惯量取决于材料的密度、宽度和直径,由于在工作过程中直径是一直变化的,所以这部分转动惯量可以称为变化的转动惯量。
另外材料的密度也不是指材料本身的密度,也要考虑材料之间的缝隙。
最后是摩擦补偿,指的是机械系统的摩擦,摩擦转矩与转速有关,一般会随转速的升高而加大,其方向与电机的实际转动方向相同。
此外,有些时候需要考虑材料在开卷曲时由于形变而需要的额外转矩,如一些比较厚的金属板等。
(Simotion Winder 包没有提供相关的补偿,需要在设定力上自己做补偿)2. Simotion Winder 包提供的开卷曲控制方式Simotion Winder 包提供的控制方式大体可分为三类:间接力控制、力闭环控制和恒速控制。
其中力闭环控制按力反馈的不同可分为力传感器闭环控制和跳舞辊闭环控制,同时按控制电机转矩的方式不同又可分为转矩限幅控制和速度调整控制。
所以Simotion Winder 包中提供六种开卷曲控制方式,见下图。
控制电机的转矩可以有两种方式,即调整速度和转矩限幅。
转矩限幅的方式是使速度环饱和电机处于转矩限幅的状态,通过直接调整转矩限幅值来控制电机的输出转矩。
速度调整的方式是使速度环不饱和,电机处于正常运行的状态。
调整速度给定后由于材料的耦合实际速度没有改变,而使速度环的积分部分相应调整,进而调整电机的输出转矩。
但这种调整方式只能用于张力闭环的控制。
为了更好的解释这种调整方式,以收卷为例描述一下调整的过程。
实际张力比设定张力小-------张力PID 输出一个正附加速度------实际速度不变使速度环积分增加-------电机输出转矩增加-------实际张力增加--------张力PID 输出减小---------实际张力与设定张力相等-------张力PID 输出为零2.1 间接力控制间接力控制是一种对力的开环控制,也是闭环力控制的基础。
这种控制方式是通过速度饱和转矩限幅来控制电机的转矩。
通过在材料的线速度上附加一个给定的线速度(velocity override 这里称为饱和速度),使卷曲轴的速度环饱和。
即开卷时减去附加线速度,使材料的线速度大于卷曲的线速度;收卷时加上附加线速度,使材料的线速度小于卷曲的线速度。
设定的力、当前直径和加减速转矩等因素计算得出电机的转矩,并做为电机转矩的限幅值,同时计算的转矩给到开卷曲电机的转矩预控上,使卷曲轴快速达到转矩限幅。
功能图如下:2.2 力闭环控制力闭环控制是在间接力控制的基础上增加一个力反馈,与力给定经PID 控制器输出调整信号。
如果采用“转矩限幅”的方式控制力,则PID 输出附加到转矩预控和转矩限幅上。
如果采用“速度调整”的方式控制力,则PID 的输出附加到速度给定上。
同时饱和速度设为零。
因为“速度调整模式”下卷曲轴的速度环不是饱和的,而是通过附加一定的速度来调整电机的转矩。
饱和速度转矩预控转矩限幅 张力给定与间接力控制相比,力闭环控制可以通过PID调整消除力误差。
误差来自以下几个方面:直径计算不准。
如采用厚度累加法时,由于厚度值不准确而产生累积误差。
摩擦测量不准。
系统的摩擦受很多情况影响,如润滑、保养等。
转动惯量不准。
材料的转动惯量受材料的密度影响最大,而减速机和卷筒的转动惯量无论是计算得出还是测量得出都可能有一定的误差。
功能图如下:张力反馈PID控制器2.3 跳舞辊闭环控制控制上与力闭环控制相似,只不过力的反馈是通过跳舞辊以位置的形式表达。
位置设定值一般设定在50%左右,即保证跳舞辊在整个活动空间的中间上下波动,这样系统会有一定的缓冲。
力的给定通常通过一个比例阀控制的汽缸向跳舞辊施加一个压力来实现。
比例阀的模拟量给定与跳舞辊的压力P 之间的影响因数有系统的气压以及汽缸的缸径。
当改变力时,可将力以附加转矩的形式通过力设定值给到开卷曲轴上,使力改变时系统可以快速的达到平衡,减少PID 调节时间。
功能图如下:F :材料张力;a :角度;G :跳舞辊重力;P :向跳舞辊施加的压力;F =G +P 2 cos a 2位置反馈位置PID 控制器2.4 恒速控制恒速控制将材料的给定速度作为收放卷的给定速度,材料上的力靠一个夹紧机构产生。
这种控制方式只控制收放卷的速度,力的大小取决于夹紧机构产生的摩擦力。
功能图如下:材料线速度检测夹紧摩擦机构收放卷速度给定3. WINDER 程序包的结构程序包括一个功能块FBWinder和一个结构sWinderConfig。
FBWinder功能块中又调用了其他几个功能块,sWinderConfig结构中又包含了其他几个结构。
具体如下:3.1 FBWinder 输入接口说明3.2 FBWinder 输入输出接口说明3.3 FBWinder 输出接口说明4. 应用步骤4.1 集成库文件开卷曲的控制程序和数据结构是以库文件形式提供给用户的,库文件的名称为“LConLib”,文件类型为“XML”。
将库文件集成到自己的项目中有两种方法:拷贝例程中的库到自己的项目中,或者在自己的项目中导入库文件。
库文件及例程都在SCOUT软件的安装文件中。
目录为:SCOUT4 .4_HF2\SCOUTDVD1\Utilities_Applications\src\Applications\Converting_Win der4.2建变量要建三个基本的变量:开卷曲功能块,数据类型为FBWinder,全局变量;开卷曲结构,数据类型为sWinderConfigType,全局变量;卷径锁存值,数据类型为REAL,掉电保持型全局变量。
建立变量之前要连接库文件LconLib。
ST和LAD两种语言例程如下:其中的“fbWinderControl 和gsWinderConfig ”为例程中的变量名称,在之后的容中涉及变量时都采用这个变量名称。
4.3 建卷曲轴和线性轴4.3.1卷曲轴卷曲轴可以为速度轴也可以为位置轴,但如果卷径计算采用位置计算法,则卷曲轴要设为位置轴,并且为旋转轴。
卷曲轴必须为一个实轴。
建立好轴后要查看轴的速度单位,并且在程序中指定单位。
● 如果卷曲轴为速度轴,并且轴的属性中显示的单位如下:则在初始化程序中将卷曲轴的单位设定为rpm● 如果卷曲轴为位置轴,并且轴的属性中显示的单位如下: 则在初始化程序中将卷曲轴的单位设定为°/s 4.3.2 线性轴因为卷曲轴类型为位置轴中的旋转轴,所以要看角度的速度,而不是speed 。
另外注意操作系统的语言,如果是中文,则此处会显示“?/s ”。
线性轴可以为速度轴,也可以为位置轴,如果设定为速度轴则需要在程序中设定线性轴的直径,以便系统计算处线性轴的线速度和线加速度。
线性轴可以为一个实轴,也可以为一个外部编码器或一个虚轴。
建立好线性轴后要查看轴的线速度单位和线加速度单位,并且在程序中指定单位。
●如果线性轴为速度轴,并且轴的属性中显示的单位如下:首先要通过设定你的线性轴的直径来确定你的长度单位。
例如你的线性轴的直径为170mm,如果想要把长度单位设为“米”,则程序如下:gsWinderConfig . r32LineAxisDiameter := 0.17;因为线性轴已经设置为速度轴,所以轴的速度单位要选择rpm,从而确定线性轴的单位为M/Min,程序如下:gsWinderConfig . eUnitLineAxisVelocity := M_MIN ;因为轴属性中的加速度为1/s2,所以线性轴的线加速度单位为M/s2,程序如下:gsWinderConfig . eUnitLineAxisAcceleration := M_S2 ;●如果线性轴为位置轴或外部编码器(无需在程序中设定线性轴的直径,要在轴的机械参数中输入周长),并且轴或编码器的属性中显示的单位如下:则线性轴的线速度单位为M/s,线加速度单位为M/s2,程序如下:gsWinderConfig . eUnitLineAxisVelocity := M_S;gsWinderConfig . eUnitLineAxisAcceleration := M_S2 ;4.4 加减速转矩补偿加减速转矩补偿就是要给功能块指定整个开卷曲机构的转动惯量,系统的转动惯量分为恒转动惯量部分和变转动惯量部分。
恒转动惯量部分在程序中分为电机的转动惯量、减速机的转动惯量和空卷轴的转动惯量。
变转动惯量部分指的是材料的转动惯量,由功能块通过材料的卷径、密度和宽度来计算。