EtherCAT特点详解
EtherCAT介绍

• 40 轴 (每轴6字节输入/ 输出数据) • 50个 I/O 站,总共560个 EtherCAT 总线端子 • 2000个数字量 + 200个模拟量I/O, 总线长度 500 m • EtherCAT性能 : 循环时间 230µs
@ 33% 总线负荷,报文长度77µs
27/12/2007
EtherCAT: Ethernet Control Automation Technology
CRC IPG
I/O
节点响 应时间
I/O
每节点 4 Byte 输入 + 4 Byte 输出 : 应用数据所占比例 4,75% @节点响应时间0µs 应用数据所占比例 1,9% @节点响应时间10µs
27/12/2007
EtherCAT: Ethernet Control Automation Technology
(Bit)或整个“一组乘客”—甚至是多组乘客
27/12/2007
EtherCAT: Ethernet Control Automation Technology
运行原理:飞速传输的以太网协议
EtherCAT: 速度更快 工业以太网 接线更灵活 组态更轻松 成本更低 更易实施 安全性能 冗余性能 适用于各种场合 经受实践考验 ETG 提供技术 及市场支持
运行原理:飞速传输的以太网协议
EtherCAT: 速度更快 工业以太网 接线更灵活 组态更轻松 成本更低 更易实施 安全性能 冗余性能 适用于各种场合 经受实践考验 ETG 提供技术 及市场支持
Car 27
如同一个高速火车: • “火车” (以太网帧) 不停地飞速行使 • 即便从狭窄的窗户也可以看到整个“火车” • “车厢”(子报文)长度可变 • 可以在每列“火车”经过时“提取”或“插入”单独的“乘客”
倍福EtherCAT介绍及应用
倍福EtherCAT介绍及应用————————————————————————————————作者:————————————————————————————————日期:ﻩ倍福EtherCAT介绍及应用摘要:EtherCAT–用于控制和自动化技术的以太网EtherCAT是以太网现场总线●EtherCAT是直达I/O 级的实时以太网。
●再也无须下挂子系统●没有网关延时●输出输出,传感器,驱动器,显示单元: 所有设备位于同一个总线上。
EtherCAT:更快传输速率:2x100Mbaud(全双工)刷新时间:●256开关量I/O:11µs●1000开关量I/O分布于100节点:30µs=0.03ms●200模拟量I/O(16位):50µs,20kHz采样频率●100伺服轴(每8字节IN+OUT):100目录EtherCAT –用于控制和自动化技术的以太网EtherCAT 是以太网现场总线ﻫ●EtherCAT 是直达I/O级的实时以太网。
●再也无须下挂子系统ﻫ●没有网关延时●输出输出,传感器,驱动器,显示单元: 所有设备位于同一个总线上。
EtherCAT :更快ﻫ传输速率: 2 x 100 Mbaudﻫ (全双工)刷新时间:●256开关量 I/O :11 µs●1000开关量I/O 分布于 100节点 :30 µs = 0.03 ms●200模拟量 I/O (16位) :50 µs, 20 kHz采样频率●100 伺服轴 (每 8 字节 IN+OUT) : 100 µs = 0.1 ms●12000开关量 I/O : 350 µsﻫ I/O和驱动使用的以太网带宽ﻫ以太网帧: ≥ 84字节(incl. preamble+ I PGInter Packet Gap)ﻫ带宽使用比较:●每节点4字节用户数据:●polling/time slicing: ca. 2.5%ﻫ●广播(master →slaves)ca.20 0●每节点2数据位的用户数据:ﻫ●EtherCAT:80…97%ﻫ实用原则:以太网“飞一般”通过绝对寻址,实现最小的协议头ﻫ优势:●专门针对分布式I/O的优化报文结构ﻫ●完全的硬件通讯: 最好的性能●若网络中只有EtherCat设备,则无须交换机ﻫ●显著的诊断功能ﻫ●以太网兼容的维护性能●可使用标准交换机ﻫ●通过交换机: 一个Mac地址可访问多达65535个节点ﻫ“飞一般”的运算,节约时间数据在报文传送期间可以修改或添加,而无需堆栈、缓存或分解/组合。
codesys的ethercat参数
codesys的ethercat参数摘要:一、介绍codesys 和ethercat1.Codesys 的背景和作用2.Ethercat 的定义和特点二、codesys 与ethercat 的关系1.Codesys 对ethercat 的支持2.Ethercat 在codesys 中的实际应用三、codesys 中的ethercat 参数设置1.Ethercat 参数概述2.重要参数及其作用3.参数设置方法与实例四、参数设置对ethercat 性能的影响1.参数设置对实时性的影响2.参数设置对通信效率的影响3.参数设置对系统稳定性的影响五、总结正文:一、介绍codesys 和ethercatCodesys(控制器开发系统)是一款由德国B&R 公司开发的用于自动化控制系统开发的软件平台。
它提供了丰富的工具和功能,帮助用户快速、高效地开发和调试控制器程序。
Ethercat(以太网实时控制协议)是一种实时以太网通信技术,广泛应用于工业自动化领域。
它具有高速、实时、可靠的特点,能满足高性能运动控制和工业自动化系统的需求。
二、codesys 与ethercat 的关系Codesys 软件平台对ethercat 技术提供了全面的支持,用户可以在codesys 中方便地配置和调试ethercat 通信。
通过codesys,用户可以充分利用ethercat 的高速、实时性能,实现高性能的自动化控制系统。
三、codesys 中的ethercat 参数设置在codesys 中,ethercat 参数设置对于保证通信的稳定性和性能至关重要。
以下是一些重要的参数及其作用:1.Sample rate:采样周期,决定了ethercat 通信的实时性。
采样周期越短,实时性越好,但会增加系统负担。
2.Synchronization:同步策略,包括sync_on_change 和sync_on_data。
sync_on_change 在数据发生变化时进行同步,sync_on_data 在接收到数据时进行同步。
EtherCAT主站平台_网卡_测试
EtherCAT主站协议栈前言EtherCAT(Ethernet for Control Automation Technology)是一种基于以太网的开发构架的实时工业现场总线通讯协议,它于2003年被引入市场,于2007年成为国际标准,并于2014年成为中国国家标准。
EtherCAT的出现为系统的实时性能和拓扑的灵活性树立了新的标准。
1)EtherCAT是最快的工业以太网技术之一,同时它提供纳秒级精确同步。
相对于设置了相同循环时间的其他总线系统,EtherCAT系统结构通常能减少25%-30%的CPU负载。
2)EtherCAT在网络拓扑结构方面没有任何限制,最多65535个节点可以组成线型、总线型、树型、星型或者任意组合的拓扑结构。
3)相对于传统的现场总线系统,EtherCAT节点地址可被自动设置,无需网络调试,集成的诊断信息可以精确定位到错误。
同时无需配置交换机,无需处理复杂的MAC或者IP 地址。
4)EtherCAT主站设备无需特殊插卡,从站设备使用可以由多个供应商提供的高集成度、低成本的芯片。
5)利用分布时钟的精确校准EtherCAT提供了有效的同步解决方案,在EtherCAT中,数据交换完全基于纯粹的硬件设备。
由于通讯利用了逻辑环网结构和全双工快速以太网而又有实际环网结构,“主站时钟”可以简单而精确地确定对每个“从站时钟”的运行补偿,反之亦然。
分布时钟基于该值进行调整,这意味着它可以在网络范围内提供信号抖动很小、非常精确的时钟。
总体来说EtherCAT具有高性能、拓扑结构灵活、应用容易、低成本、高精度设备同步、可选线缆冗余和功能性安全协议、热插拔等特点。
一、EtherCAT主站协议栈介绍北京盟通科技有限公司是德国acontis在中国大陆唯一授权的合作伙伴,德国acontis 公司提供跨平台、跨操作系统的商用EtherCAT主站协议栈及主站解决方案,其产品的专业性和可靠性得到全球超过200家工业客户的信赖与认可,包括KUKA机器、伦茨、阿尔斯通、巴赫曼等众多国际知名企业。
EtherCAT简介

EtherCAT——一种新的工业以太网标准概述近年来,在自动化控制技术领域,EtherCAT已经成为一种全球范围内先进的技术标准。
EtherCAT技术组(ETG)成立于2003年11月,截至2009年1月已经有来自于45个国家的900个成员加入该技术组。
自上世纪90年代末,以太网技术已经被认为是现场总线技术的一个补充,但并非完全取代了现场总线技术。
现场总线技术适合于大数据量传输,但不适合于测控工程领域中的确定性进程通讯以及高速数据传输。
因此,EtherCAT的设计目标是支持标准的以太网,并且能够以最小的硬件成本在实时控制领域开展使用,更新周期快,稳定性高。
这些特点,使得EtherCAT成为分布式测量应用的理想选择。
本文的重点是测量数据的采集,并阐明EtherCAT作为分布式测量系统基础技术的可能性——包括替代CAN或者Profibus的可能性。
EtherCAT的工作原理为了理解EtherCAT作为通信总线在测量工程中的优势,我们需要了解数据是如何传输的。
基于以太网的总线——包括在主/从系统中——接收器通常由发送器分配一个地址。
数据包被发送到接收器,接收器必须在能够发送任何应答之前,接收全部的数据。
在网络中的每一个用户都要遵循这样的过程。
相比之下,当主站发送的数据报文传输经过其节点时,EtherCAT从站设备仅接收为其发送的数据,此外,在报文传输过程中输入数据即被添加到报文中。
因此,一帧数据可以不必等到全部接收完才进行数据处理,相反地,数据处理可以尽早开始。
消息也仅延时几位发送。
分布式测量系统近年来,测量数据的采集已经趋向于分散化。
这个趋势的一个重要方面是试图尽可能近地在传感器端将输出的模拟信号数字化,以避免信号在传输线路中受到干扰的影响。
对于这种类型的数据采集,一个主要的前提条件是测量模块要离传感器近并且能够能够实时进行总线连接。
在这方面,允许更多独立用户的标准化总线连接将在普遍适用性和制造商独立性上发挥独特的优势。
ethercat 闭环工作原理

ethercat 闭环工作原理
EtherCAT是一种实时以太网通讯协议,具有高速和高数据有效率的特点。
其工作原理如下:
在一个通讯周期内,主站发送以太网数据帧给各个从站。
数据帧到达从站后,每个从站根据寻址从数据帧内提取相应的数据,并把它反馈的数据写入数据帧。
当数据帧发送到最后一个从站后返回,并通过第一个从站返回至主站。
这种传输方式在一个周期内实现了数据通讯,还改善了带宽利用率,最大有效数据利用率达90%以上。
如需更多关于EtherCAT闭环工作原理的资料,建议查阅相关文献或咨询专业人士。
各种工业以太网比较

EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,EterCAT名称中的CAT为ControlAutomation Technology(控制自动化技术)首字母的缩写。
最初由德国倍福自动化有限公司(Beckhoff AutomationGmbH)研发。
EtherCAT为系统的实时性能和拓扑的灵活性树立了新的标准,同时,它还符合甚至降低了现场总线的使用成本。
EtherCAT的特点还包括高精度设备同步,可选线缆冗余,和功能性安全协议(SIL3)。
Ethernet/IP是一个面向工业自动化应用的工业应用层协议。
它建立在标准UDP/IP与TCP/IP 协议之上,利用固定的以太网硬件和软件,为配置、访问和控制工业自动化设备定义了一个应用层协议西蒙公司开发PROFINET由PROFIBUS国际组织(PROFIBUS International,PI)推出,是新一代基于工业以太网技术的自动化总线标准。
作为一项战略性的技术创新,PROFINET为自动化通信领域提供了一个完整的网络解决方案,囊括了诸如实时以太网、运动控制、分布式自动化、故障安全以及网络安全等当前自动化领域的热点话题,并且,作为跨供应商的技术,可以完全兼容工业以太网和现有的现场总线(如PROFIBUS)技术,保护现有投资。
PROFINET是适用于不同需求的完整解决方案,其功能包括8个主要的模块,依次为实时通信、分布式现场设备、运动控制、分布式自动化、网络安装、IT标准和信息安全、故障安全和过程自动化。
MODBUS/TCP是简单的、中立厂商的用于管理和控制自动化设备的MODBUS系列通讯协议的派生产品。
显而易见,它覆盖了使用TCP/IP协议的“Intranet”和“Internet”环境中MODBUS 报文的用途。
协议的最通用用途是为诸如PLC’s,I/O模块,以及连接其它简单域总线或I/O 模块的网关服务的。
MODBUS/TCP协议是作为一种(实际的)自动化标准发行的。
EtherCAT特点详解

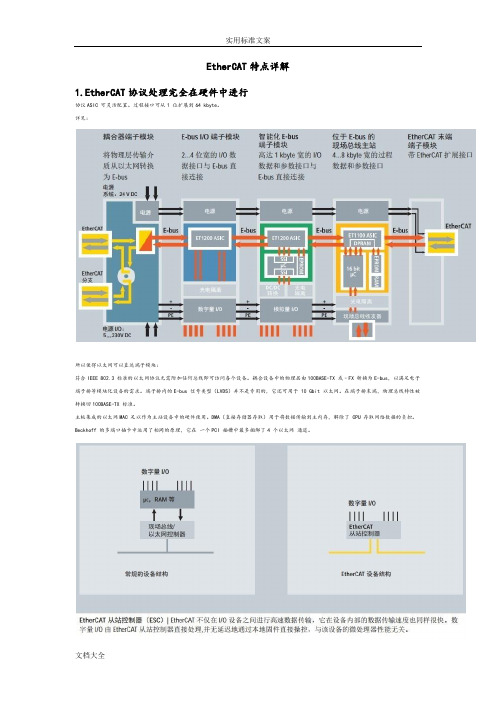
EtherCAT特点详解1。
EtherCAT协议处理完全在硬件中进行协议ASIC 可灵活配置。
过程接口可从1 位扩展到64 kbyte。
详见:所以使得以太网可以直达端子模块:符合IEEE 802。
3 标准的以太网协议无需附加任何总线即可访问各个设备.耦合设备中的物理层由100BASE—TX 或–FX 转换为E-bus,以满足电子端子排等模块化设备的需求。
端子排内的E-bus 信号类型(LVDS)并不是专用的,它还可用于 10 Gbit 以太网。
在端子排末端,物理总线特性被转换回100BASE-TX 标准。
主板集成的以太网MAC 足以作为主站设备中的硬件使用.DMA(直接存储器存取)用于将数据传输到主内存,解除了 CPU 存取网络数据的负担.Beckhoff 的多端口插卡中运用了相同的原理,它在一个PCI 插槽中最多捆绑了4 个以太网通道。
2. EtherCAT的性能EtherCAT 使网络性能达到了一个新境界.1000 个I/O 的更新时间只需30 µs,其中还包括I/O 周期时间。
单个以太网帧最多可进行1486 字节的过程数据交换,几乎相当于12000 个数字输入和输出,而传送这些数据耗时仅为300 µs。
与100 个伺服轴的通讯每100 µs 执行一次.可在这一周期时间内更新带有命令值和控制数据的所有轴的实际位置及状态,分布式时钟技术使轴的同步偏差小于1 微秒。
超高性能的EtherCAT 技术可以实现传统的现场总线系统无法迄及的控制理念.这样,通过总线也可以形成超高速控制回路.以前需要本地专用硬件支持的功能现在可在软件中加以映射。
巨大的带宽资源使得状态数据能够与任何数据并行传输。
EtherCAT 使通讯技术和现代工业PC 所具有的超强计算能力相适应,总线系统不再是控制理念的瓶颈,分布式I/O 可能比大多数本地I/O 接口运行速度更快。
这种网络性能优势在具有相对中等运算能力的小型控制器中较为明显。
EtherCAT特点详解

EtherCAT特点详解1.EtherCAT协议处理完全在硬件中进行协议ASIC 可灵活配置。
过程接口可从1 位扩展到64 kbyte。
详见:所以使得以太网可以直达端子模块:符合IEEE 802.3 标准的以太网协议无需附加任何总线即可访问各个设备。
耦合设备中的物理层由100BASE-TX 或–FX 转换为E-bus,以满足电子端子排等模块化设备的需求。
端子排内的E-bus 信号类型(LVDS)并不是专用的,它还可用于10 Gbit 以太网。
在端子排末端,物理总线特性被转换回100BASE-TX 标准。
主板集成的以太网MAC 足以作为主站设备中的硬件使用。
DMA(直接存储器存取)用于将数据传输到主内存,解除了CPU 存取网络数据的负担。
Beckhoff 的多端口插卡中运用了相同的原理,它在一个PCI 插槽中最多捆绑了4 个以太网通道。
2. EtherCAT的性能EtherCAT 使网络性能达到了一个新境界。
1000 个I/O 的更新时间只需30 µs,其中还包括I/O 周期时间。
单个以太网帧最多可进行1486 字节的过程数据交换,几乎相当于12000 个数字输入和输出,而传送这些数据耗时仅为300 µs。
与100 个伺服轴的通讯每100 µs 执行一次。
可在这一周期时间内更新带有命令值和控制数据的所有轴的实际位置及状态,分布式时钟技术使轴的同步偏差小于1 微秒。
超高性能的EtherCAT 技术可以实现传统的现场总线系统无法迄及的控制理念。
这样,通过总线也可以形成超高速控制回路。
以前需要本地专用硬件支持的功能现在可在软件中加以映射。
巨大的带宽资源使得状态数据能够与任何数据并行传输。
EtherCAT 使通讯技术和现代工业PC 所具有的超强计算能力相适应,总线系统不再是控制理念的瓶颈,分布式I/O 可能比大多数本地I/O 接口运行速度更快。
这种网络性能优势在具有相对中等运算能力的小型控制器中较为明显。
工业自动化现场总线:EtherCAT

工业自动化现场总线:EtherCAT2014 年 8 月 17 日下午 5:31crifan已有556人围观我来说几句EtherCAT是什么EtherCAT==Ether net for C ontrol A utomation T echnology==用于控制自动化技术的以太网EtherCAT是一个开放架构,以以太网为基础的现场总线系统。
常被称为实时以太网,开放的实时以太网。
EtherCAT是确定性的工业以太网,最早是由德国的Beckhoff公司所研发。
EtherCAT主要用于实现自动化的超高速通讯EtherCAT简评Beckhoff 基于以太网现场总线系统的 EtherCAT(Ethernet for Control Automation Technology)技术具有性能优异、拓扑结构灵活和系统配置简单等特点。
EtherCAT 突破了传统现场总线系统的限制,为现场总线技术领域树立了新的性能标准:30 µs 内可以更新1000 个 I/O,利用以太网和因特网技术实现垂直优化集成,网络容量几乎无限。
使用 EtherCAT 后,可以用简单的线型拓扑结构替代昂贵的星型以太网拓扑结构,无需昂贵的基础组件。
EtherCAT 还可以使用传统的交换机连接方式,以集成其它的以太网设备。
其它的实时以太网方案需要专用的主站硬件或扫描卡,而EtherCAT 只需要价格低廉的标准以太网卡便可实现。
EtherCAT 拥有杰出的通讯性能,接线非常简单,并对其它协议开放。
传统的现场总线系统已达到了极限,而EtherCAT则突破建立了新的技术标准——30 µs内可以更新1000个I/O 数据,可选择双绞线或光纤,并利用以太网和因特网技术实现垂直优化集成。
使用EtherCAT,可以用简单的线型拓扑结构替代昂贵的星型以太网拓扑结构,无需昂贵的基础组件。
EtherCAT还可以使用传统的交换机连接方式,以集成其它的以太网设备。
ethercat通讯原理
ethercat通讯原理EtherCAT(以太CAT)是一种高性能、实时性和开放性的实时以太网通信技术。
它基于标准的以太网硬件和IEEE 802.3以太网协议进行通信。
EtherCAT的通信原理是通过在以太网数据帧中进行快速和实时的数据通信,以达到高效的通信和控制。
下面将详细介绍EtherCAT通信的原理。
EtherCAT通信的核心原理是主站和从站之间的数据传递。
在EtherCAT网络中,主站是负责控制和监视从站的设备,而从站是执行主站指令的设备。
主站通过以太网发送数据帧,从站在接收到数据帧后,按照EtherCAT协议进行数据处理,并将数据返回给主站。
EtherCAT网络将数据帧分为多个数据段(Data Segment),每个数据段有一个从站的网络地址和数据大小。
主站发送数据帧时,数据段经过整个从站链路,每个从站在接收到数据段后,处理其中的数据并将数据通过链路传递给下一个从站。
EtherCAT通信的特点之一是采用了分布式时钟同步技术。
在整个EtherCAT网络中,有一个主站担任时钟主节点的角色,负责向所有从站发送同步数据。
从站接收到同步数据后,利用硬件实现时钟同步,保证所有从站的时钟保持同步。
EtherCAT通信还采用了逐次处理的方式,即从站接收到数据后立即处理数据,并将处理结果发送给下一个从站。
这样可以大大减小主站与从站之间的通信延迟,并且降低了通信周期。
EtherCAT通信的速度非常快,达到每个数据帧可达到1000多个从站的传输速率,同时EtherCAT通信还可以与标准以太网连接,实现与其他以太网设备的数据交换,提高了系统的灵活性和可扩展性。
总结起来,EtherCAT通信的原理是通过将数据分成多个数据段,逐个传递给从站,在从站之间进行快速数据处理和传递。
采用分布式时钟同步和逐次处理的技术,实现高效的通信和控制。
EtherCAT通信的优势是实时性强、速度快,同时与标准以太网兼容,具有较高的可扩展性和灵活性。
ethercat 直线插补 原理

ethercat 直线插补原理EtherCAT 直线插补原理介绍EtherCAT(以太CAT)是一种高速实时以太网通信协议,用于现场总线系统。
直线插补是在机床控制系统中常用的一种运动控制技术,它可以将多个点之间的平滑曲线插值为一系列线性插值点,从而实现精确的加工路径。
本文将以浅薄的角度解释 EtherCAT 直线插补的原理。
什么是直线插补直线插补是一种插补运动的方式,通过定义起点和终点,并指定一系列中间点,计算出使工具在这些点之间移动的线性路径。
这种方式在工业自动化领域中非常常见,尤其在数控机床系统中广泛应用。
EtherCAT 协议简介EtherCAT 是一种高性能实时以太网通信协议,其关键特点是通过一个主站实现多个从站的同步通信。
在 EtherCAT 网络中,主站负责发送指令和接收数据,而从站则负责接收指令并执行相应的动作。
EtherCAT 直线插补的原理EtherCAT 直线插补的原理是通过主站发送插补指令给从站,从站根据指令进行相应的插补计算,并将计算结果返回给主站。
主站和从站之间的通信是通过 EtherCAT 协议进行的。
插补算法在 EtherCAT 直线插补中,有多种插补算法可以选择,常见的有线性插值、梯形插值和圆弧插值。
在这些算法中,线性插值是最简单的一种方法。
它通过计算起点和终点之间的线性路径,并根据运动速度和加速度控制工具的运动。
控制器的角色在 EtherCAT 直线插补系统中,主站充当控制器的角色,从站则是执行器。
主站负责生成插补指令,并将其发送给从站进行执行。
从站接收并解析指令,根据指令计算插补路径,并控制执行器按照路径移动。
实时性要求EtherCAT 直线插补系统的一个重要特点是实时性要求高。
在实际应用中,对于加工路径的精细度和速度要求都很高,因此控制指令的传输和执行都需要在严格的时间约束下完成。
总结EtherCAT 直线插补是一种在工业自动化中广泛应用的运动控制技术。
通过使用高性能实时以太网通信协议,主站可以发送插补指令给从站,并实现精确的加工路径控制。
igh ethercat 示例代码 直线电机 -回复

igh ethercat 示例代码直线电机-回复什么是EtherCAT?EtherCAT是一种实时以太网通信协议,它具有高速和低延迟的特点,被广泛应用于工业自动化领域。
EtherCAT的主要特点是基于一种主从式架构,在一个环形的总线上连接多个从站设备,从而实现分布式控制和数据交换。
EtherCAT主要用于实时控制和监测任务,可以支持复杂的运动控制系统。
什么是直线电机?直线电机是一种将电能转化为直线运动的装置。
与常见的旋转电机不同,直线电机可以产生直线运动而不需要通过转动的装置。
直线电机主要由电磁感应原理、磁场定位、传感器和控制系统组成。
直线电机优点包括高速、精度高、响应灵敏等,因此在自动化设备和机器人等领域得到广泛应用。
如何实现EtherCAT与直线电机的控制?要实现EtherCAT与直线电机的控制,首先需要使用EtherCAT主站设备和直线电机驱动器。
EtherCAT主站设备负责控制和监视整个系统,而直线电机驱动器则负责将电能转化为直线运动并与EtherCAT通信。
下面是一步一步的流程:1. 硬件准备首先,需要准备一台安装了EtherCAT主站设备的计算机或嵌入式系统,以及一台带有直线电机的控制系统。
确保EtherCAT主站设备和直线电机驱动器能够通过EtherCAT总线进行连接。
2. 配置EtherCAT主站设备使用EtherCAT主站设备的软件工具,配置EtherCAT网络参数,例如总线位拓扑、通信速度等。
确保EtherCAT主站设备与直线电机驱动器可以正常进行通信。
3. 配置直线电机驱动器使用直线电机驱动器的配置软件,设置驱动器的参数,例如驱动电流、速度限制等。
确保直线电机驱动器能够正常地接收和响应EtherCAT主站设备发送的控制指令。
4. 编写控制程序使用EtherCAT主站设备的开发工具,编写控制程序来实现对直线电机的控制。
控制程序可以包括运动规划、位置闭环控制、速度控制等功能。
根据具体应用需求,编写相应的代码来实现所需的控制逻辑。
ethercat协议

ethercat协议EtherCAT协议。
EtherCAT(Ethernet for Control Automation Technology)是一种高性能实时以太网通信协议,它是基于乙太网的一种工业通信协议。
EtherCAT协议的特点是具有极高的实时性和通信效率,适用于工业自动化领域的高速数据交换和实时控制。
EtherCAT采用了一种分布式IO的网络拓扑结构,通过在每个从站设备上进行数据处理和转发,实现了一种高效的实时通信方式。
在EtherCAT网络中,主站通过发送数据帧的方式,将数据从一个从站传递到另一个从站,从而实现了高效的数据交换和实时控制。
与传统的以太网通信协议相比,EtherCAT协议具有以下几点优势:1. 高实时性,EtherCAT协议采用了分布式IO的方式,从而实现了高效的数据传输和实时控制。
在EtherCAT网络中,数据可以在微秒级的时间内传递,满足了工业自动化领域对实时性的要求。
2. 高通信效率,EtherCAT网络中的从站设备可以同时接收和发送数据,从而实现了并行的数据传输。
这种并行传输的方式大大提高了通信效率,减少了通信的延迟和传输的时间。
3. 灵活的拓扑结构,EtherCAT网络支持灵活的拓扑结构,可以根据实际的应用需求进行布线和配置。
从站设备之间可以通过链式、星型、树状等多种方式进行连接,满足了不同场景下的网络布局需求。
4. 易于集成,EtherCAT协议可以与现有的以太网设备无缝集成,不需要额外的硬件支持和网络设备。
这使得EtherCAT协议在工业自动化领域的应用更加便捷和灵活。
总的来说,EtherCAT协议作为一种高性能实时以太网通信协议,在工业自动化领域具有广泛的应用前景。
它不仅可以满足工业控制系统对于高实时性和高通信效率的要求,同时也具有灵活的拓扑结构和易于集成的特点,为工业自动化领域的网络通信提供了一种全新的解决方案。
总结一下,EtherCAT协议的出现为工业自动化领域的网络通信带来了全新的可能性,它以其高实时性、高通信效率、灵活的拓扑结构和易于集成等特点,成为了工业控制系统中的重要通信协议。
EtherCAT特点详解
EtherCAT特点详解1.EtherCAT协议处理完全在硬件中进行协议ASIC 可灵活配置。
过程接口可从1 位扩展到64 kbyte。
详见:所以使得以太网可以直达端子模块:符合IEEE 802.3 标准的以太网协议无需附加任何总线即可访问各个设备。
耦合设备中的物理层由100BASE-TX 或–FX 转换为E-bus,以满足电子端子排等模块化设备的需求。
端子排内的E-bus 信号类型(LVDS)并不是专用的,它还可用于 10 Gbit 以太网。
在端子排末端,物理总线特性被转换回100BASE-TX 标准。
主板集成的以太网MAC 足以作为主站设备中的硬件使用。
DMA(直接存储器存取)用于将数据传输到主内存,解除了 CPU 存取网络数据的负担。
Beckhoff 的多端口插卡中运用了相同的原理,它在一个PCI 插槽中最多捆绑了4 个以太网通道。
2. EtherCAT的性能EtherCAT 使网络性能达到了一个新境界。
1000 个I/O 的更新时间只需30 µs,其中还包括I/O 周期时间。
单个以太网帧最多可进行1486 字节的过程数据交换,几乎相当于12000 个数字输入和输出,而传送这些数据耗时仅为300 µs。
与100 个伺服轴的通讯每100 µs 执行一次。
可在这一周期时间内更新带有命令值和控制数据的所有轴的实际位置及状态,分布式时钟技术使轴的同步偏差小于1 微秒。
超高性能的EtherCAT 技术可以实现传统的现场总线系统无法迄及的控制理念。
这样,通过总线也可以形成超高速控制回路。
以前需要本地专用硬件支持的功能现在可在软件中加以映射。
巨大的带宽资源使得状态数据能够与任何数据并行传输。
EtherCAT 使通讯技术和现代工业PC 所具有的超强计算能力相适应,总线系统不再是控制理念的瓶颈,分布式I/O 可能比大多数本地I/O 接口运行速度更快。
这种网络性能优势在具有相对中等运算能力的小型控制器中较为明显。
igh ethercat 示例代码 直线电机

igh ethercat 示例代码直线电机摘要:I.引言- 介绍EtherCAT 技术- 说明EtherCAT 在直线电机控制中的应用II.EtherCAT 基本概念- EtherCAT 的工作原理- EtherCAT 的优势III.直线电机简介- 直线电机的定义- 直线电机的分类- 直线电机的工作原理IV.EtherCAT 示例代码- 代码概述- 代码实现V.结论- 总结EtherCAT 技术在直线电机控制中的应用- 展望EtherCAT 技术的未来发展趋势正文:I.引言EtherCAT(Ethernet for Control Automation Technology)是一种用于工业自动化领域的实时以太网技术。
它具有高速、高精度的特点,在各种工业控制场合得到了广泛的应用。
直线电机作为电机的一种,具有结构简单、运行可靠等优点,被广泛应用于各种直线运动场合。
本文将详细介绍EtherCAT 技术在直线电机控制中的应用。
II.EtherCAT 基本概念EtherCAT 是一种基于以太网的实时控制网络,通过主从通信实现设备之间的数据交换。
EtherCAT 的工作原理是,主设备周期性地向从设备发送数据帧,从设备根据这些数据帧执行相应的操作。
EtherCAT 的优势在于其高速、高精度的数据传输能力,以及良好的实时性能。
III.直线电机简介直线电机是一种将电能直接转换为直线运动的电机。
它主要由线圈和磁铁组成,线圈放置在磁铁的磁场中,当电流通过线圈时,会在磁铁上产生磁场,从而产生力矩,使电机产生直线运动。
直线电机根据其工作原理和结构特点,可分为永磁直线电机、混合式直线电机和电磁式直线电机等。
IV.EtherCAT 示例代码以下是一个简单的EtherCAT 示例代码,用于控制直线电机的运动:```c#include <stdio.h>#include <string.h>#include <fcntl.h>#include <unistd.h>#include <arpa/inet.h>#include <netinet/in.h>#include <ethercat.h>#define ETHERCAT_PORT 0x800#define ETHERCAT_BAUD 1000000#define ETHERCAT_PKT_SIZE 64int main(){int fd;struct sockaddr_in addr;unsigned char data[ETHERCAT_PKT_SIZE];int count = 0;// 初始化EtherCAT 设备if ((fd = open("/dev/ethercat", O_RDWR)) < 0){perror("open");return 1;}// 配置EtherCAT 设备if (ioctl(fd, ETHERCAT_IOCTL_SET_BAUD, ETHERCAT_BAUD) < 0) {perror("ioctl");return 1;}if (ioctl(fd, ETHERCAT_IOCTL_SET_PORT, ETHERCAT_PORT) < 0){perror("ioctl");return 1;}// 循环读取EtherCAT 数据while (1){memset(data, 0, ETHERCAT_PKT_SIZE);if (read(fd, data, ETHERCAT_PKT_SIZE) !=ETHERCAT_PKT_SIZE){perror("read");return 1;}// 根据数据控制直线电机count += data[0];if (count >= 100){// 当count 达到100 时,控制直线电机正向运动// 示例代码仅作演示,实际应用需根据具体场景进行修改}}close(fd);return 0;}```V.结论本文详细介绍了EtherCAT 技术在直线电机控制中的应用。
ethercat协议解析

• 信号分为模拟信号与数字信号两类;
• 模拟信号的电平连续变化;
• 数字信号的电平以脉冲变化;
模拟信号
v(t)
与数字信号
t
波形
(a)模拟信号 v(t)
t (b)数字信号
.
数据编码技术
计算机的 二进制数据
计算机内部 表示信息的 二进制数据
模拟信号 数字信号
模拟 数据 编码
数字 数据 编码
振幅键控ASK 移频键控FSK 移相键控PSK
• 1)EtherCAT是最快的工业以太网技术之一,同时它提供纳秒级精确同步。相对于设置了相同循环时 间的其他总线系统,EtherCAT系统结构通常能减少25%-30%的CPU负载。
• 2)EtherCAT在网络拓扑结构方面没有任何限制,最多65535个节点可以组成线型、总线型、树型、星 型或者任意组合的拓扑结构。
外同步编码 内同步编码
非归零码
曼彻斯特编码 差分曼彻斯特编码
通信系统用 于表示二进 制数据类型
数据信号 编码类型
.
具体的数据编码方法
模拟数据编码方法
b0 0 数据
(a)ASK ω
2
(b)FSK
π (c)PSK(绝对)
b1
b2
b3
1
0
0
ω
ω
ω
ω
1
2
2
0
π
π
b4
b5
1
0
ω
ω
ω
1
2
0
π
+0
+π
+0
+0
+π
• 第二种策略是基于以太网的实现,在网络层和传输层上进行修改。送一类工业以太网基于 标准的ISO/IEC802.3中物理层和数据链路层协议,工业控制的过程数据不通过TCP/IP协议传 输,而是采用专用的协议完成其传输。仅当系统需要访问商用网络时才使用TCP/IP。常用手 段有时间片机制。这一类工业太网中比较典型的是Ethernet powerlink、EPA(Ethernet for plant automation)和profinet RT(real-time)。
02. EtherCAT技术介绍

© EtherCAT Technology Group,
3
性能比较: 应用案例
EtherCAT : - 速度更快 - 同步性 - 工业以太网 - 灵活性 - 应用简单 - 成本低廉 - 实施轻松 - 安全性 - 冗余性 - 开放性 - 一致性 - 通用性 - 经实践考验
• • • •
40 轴 (每轴 20 Byte 输入和输出数据) 50 I/O 站,共计560个EtherCAT总线端子模块 2000 个数字量 + 200个模拟量, 总线长度500米 EtherCAT: 循环时间 = 276 µs 总线负载44%, 报文长度 = 122 µs
• 采用Scope View长时间监视两个独立的设备 • 两设备间距300 个节点,线缆长度120米
Interrupt Node 1
Simultaneousness: ~15 ns Jitter: ~ +/-20ns
Interrupt Node 300
© EtherCAT Technology Group,
工业以太网现场总线
02.07.2013
EtherCAT – 以太网现场总线
EtherCAT : - 速度更快 - 同步性 - 工业以太网 - 灵活性 - 应用简单 - 成本低廉 - 实施轻松 - 安全性 - 冗余性 - 开放性 - 一致性 - 通用性 - 经实践考验
• • • •
EtherCAT 一网到底,协议处理直达I/O层 无需任何下层子总线 无网关延迟 单一系统即可涵盖所有设备: 输入输出,传感器,执行器,驱动,显示….
160 Bit IP Header
© EtherCAT Technology Group,
19
Eathercat

EtherCAT求助编辑百科名片EtherCAT产品EtherCAT 是开放的实时以太网络通讯协议,最初由德国倍福自动化有限公司(Beckhoff Automation GmbH) 研发。
EtherCAT为系统的实时性能和拓扑的灵活性树立了新的标准,同时,它还符合甚至降低了现场总线的使用成本。
EtherCAT的特点还包括高精度设备同步,可选线缆冗余,和功能性安全协议(SIL3)。
目录简介原理端子实现以太网协议性能拓扑结构分布式时钟热连接高可用性安全性诊断开放性展开简介原理端子实现以太网协议性能拓扑结构分布式时钟热连接高可用性安全性诊断开放性展开编辑本段简介Ethercat主张"以太网控制自动化技术" 。
它是一个开放源代码,高性能的系统,目的是利用以太网协议(最惠国待遇系统局域网),在一个工业环境,特别是对工厂和其他制造业的关注,其中利用机器人和其他装备线上的技术。
EtherCAT是IEC规范(IEC/PAS 62407)。
编辑本段原理目前有多种用于提供实时功能的以太网方案:例如,通过较高级的协议层禁止CSMA/CD存取过程,并使用时间片或轮询过程来取代它。
其它方案使用专用交换机,并采用精确的时间控制方式分配以太网数据包。
尽管这些解决方案能够比较快和比较准确地将数据包传送到所连接的以太网节点,但带宽的利用率却很低,特别是对于典型的自动化设备,因为即使对于非常小的数据量,也必须要发送一个完整的以太网帧。
而且,重新定向到输出或驱动控制器,以及读取输入数据所需的时间主要取决于执行方式。
通常也需要使用一条子总线,特别是在模块化I/O系统中,这些系统与Beckhoff K-总线一样,通过同步子总线系统加快传输速度,但是这样的同步将无法避免引起通讯总线传输的延迟。
通过采用EtherCAT技术,Beckhoff突破了其它以太网解决方案的这些系统限制:不必再像从前那样在每个连接点接收以太网数据包,然后进行解码并复制为过程数据。
ethercat 入门 系统描述

EtherCAT 入门系统描述导言EtherCAT(以太CAT)是一种实时以太网通信协议,用于在工业自动化领域中,实现高性能、低延迟的实时控制系统。
本文将介绍EtherCAT的基本概念、工作原理、应用领域和入门实践,帮助读者对EtherCAT有一个全面的了解。
1. EtherCAT 概述EtherCAT是一种基于以太网的实时控制总线技术,由Beckhoff在2003年开发并发布。
EtherCAT使用一种分布式时钟同步方法,可以在微秒级实现通信,具有低延迟和高带宽的特点。
它通过实时以太网实现分布式控制器、设备和传感器之间的通信,并支持多种通信拓扑,如线性、环形和星形等。
2. EtherCAT 架构EtherCAT系统由主站和从站组成。
主站通常是一个工控机或PLC,负责发送和接收数据。
从站可以是各种类型的设备和传感器,如电机驱动器、温度传感器等。
主站通过EtherCAT总线将数据发送到从站,并从从站接收响应数据。
3. EtherCAT 性能特点3.1 高实时性EtherCAT通过一种优化的通信协议和分布式时钟同步机制,实现了高实时性的通信。
在EtherCAT网络中,从站可以将数据实时传输到主站,主站可以实时下发控制指令到从站,这使得EtherCAT非常适用于实时控制和反馈应用。
3.2 低传输延迟EtherCAT的通信延迟非常低,通常在微秒级别。
这主要得益于EtherCAT的传输方式,数据在从站上通过实时以太网线路进行处理,然后再通过总线传输到主站。
这种快速传输的特点使得EtherCAT在需要快速响应的应用中非常有用。
3.3 高带宽EtherCAT的带宽可以根据实际应用需求进行扩展,可以支持多个从站同时进行数据传输。
这使得EtherCAT在需要高带宽的应用场景中非常适用,如高速运动控制和大规模数据采集等。
4. EtherCAT 应用领域EtherCAT在众多工业自动化领域中得到广泛应用,以下是一些常见的应用领域:- 机床控制:EtherCAT可用于高精度和高速度的机床控制系统,通过将运动控制器和传感器连接到EtherCAT总线上,实现快速准确的运动控制。