Outlierdetection in the multiple clustersetting
迁移学习中的无监督迁移和半监督迁移方法研究
迁移学习中的无监督迁移和半监督迁移方法研究迁移学习是一种通过将已学习的知识应用于新任务中的机器学习方法。
在实际应用中,由于数据的不完整性和不平衡性,以及标签的稀缺性等问题,传统的监督学习方法往往难以取得理想的效果。
为了解决这些问题,研究者们提出了无监督迁移和半监督迁移方法。
本文将对这两种方法进行深入研究。
无监督迁移是指在源领域和目标领域之间没有标签信息的情况下进行知识迁移。
无监督迁移通过挖掘源领域和目标领域之间的相似性来实现知识传递。
最常用的无监督迁移方法之一是领域自适应。
领域自适应通过对源领域和目标领域进行特征空间上的映射,使得两个领域能够在特征空间上具有相似性。
常见的映射方法有最大均值差异(MMD)和核最大均值差异(KMMD)等。
另一种常见的无监督迁移方法是主成分分析(PCA)和独立成分分析(ICA)。
PCA通过对源领域和目标领域的数据进行降维,找到它们之间的共享特征,从而实现知识迁移。
ICA则通过对源领域和目标领域进行独立分析,找到它们之间的独立特征,并进行知识迁移。
除了无监督迁移方法外,半监督迁移方法也是一种常用的迁移学习方法。
半监督迁移是指在源领域和目标领域之间只有部分标签信息的情况下进行知识迁移。
半监督迁移通过利用已有的标签信息和未标签信息来实现知识传递。
最常用的半监督迁移方法之一是自训练(self-training)。
自训练通过使用已有的标签信息来训练模型,并利用模型对未标签数据进行预测,从而获得更多的标签信息。
另一种常见的半监督迁移方法是共享分布式表示学习(SDRL)。
SDRL通过对源领域和目标领域进行表示学习,将它们映射到一个共享特征空间中,并利用已有的标签信息来训练模型。
在这个共享特征空间中,源领域和目标领域之间的相似性得到了保留,从而实现了知识迁移。
除了以上介绍的无监督迁移和半监督迁移方法,还有许多其他的方法被用于解决迁移学习问题。
例如,基于图的迁移学习方法通过构建源领域和目标领域之间的图结构来实现知识传递。
拥挤目标检测算法
拥挤目标检测算法引言:随着城市人口的不断增加,交通拥堵问题也日益突出。
为了解决这一问题,研究人员开发了拥挤目标检测算法,以准确、高效地识别交通场景中的拥挤情况。
本文将介绍拥挤目标检测算法的原理、应用和未来发展方向。
一、原理拥挤目标检测算法基于计算机视觉技术,通过分析图像或视频中的像素信息,识别出交通场景中的拥挤目标。
该算法通常包括以下几个步骤:1. 图像预处理:对输入的图像进行去噪、灰度化和尺寸调整等预处理操作,以便后续的目标检测算法能够更好地处理图像数据。
2. 目标检测:利用深度学习模型,如卷积神经网络(CNN)或循环神经网络(RNN),对图像中的目标进行检测。
常用的目标检测算法有Faster R-CNN、YOLO和SSD等。
3. 特征提取:从检测到的目标中提取特征信息,以便后续的拥挤分析和预测。
常用的特征提取方法有基于颜色、纹理和形状等的特征描述子。
4. 拥挤分析:根据目标的位置、数量和运动轨迹等信息,分析交通场景中的拥挤程度。
可以采用密度估计、聚类分析和轨迹预测等方法进行拥挤分析。
二、应用拥挤目标检测算法在交通管理、智能监控和城市规划等领域具有广泛的应用前景。
1. 交通管理:利用拥挤目标检测算法,交通管理部门可以实时监测道路交通情况,及时采取措施缓解拥堵。
例如,在拥堵路段增加交通警力、调整信号灯时长或引导交通流向畅通的道路。
2. 智能监控:拥挤目标检测算法可以应用于城市中的摄像头监控系统,实时监测人流、车流等信息,为城市安全和治安管理提供有力的支持。
例如,检测出人群聚集、交通拥堵等异常情况时,及时报警和采取措施。
3. 城市规划:通过拥挤目标检测算法,城市规划部门可以分析交通拥堵的原因和影响,优化道路布局和交通规划。
例如,在城市规划中考虑道路容量、交通流量分配和公共交通优先等因素,以改善交通拥堵问题。
三、发展方向拥挤目标检测算法在不断发展和改进中,未来的研究方向主要包括以下几个方面:1. 提高检测准确率:通过优化模型结构、增加训练数据和改进训练算法等方式,提高拥挤目标检测算法的准确率和鲁棒性。
基于多层特征嵌入的单目标跟踪算法
基于多层特征嵌入的单目标跟踪算法1. 内容描述基于多层特征嵌入的单目标跟踪算法是一种在计算机视觉领域中广泛应用的跟踪技术。
该算法的核心思想是通过多层特征嵌入来提取目标物体的特征表示,并利用这些特征表示进行目标跟踪。
该算法首先通过预处理步骤对输入图像进行降维和增强,然后将降维后的图像输入到神经网络中,得到不同层次的特征图。
通过对这些特征图进行池化操作,得到一个低维度的特征向量。
将这个特征向量输入到跟踪器中,以实现对目标物体的实时跟踪。
为了提高单目标跟踪算法的性能,本研究提出了一种基于多层特征嵌入的方法。
该方法首先引入了一个自适应的学习率策略,使得神经网络能够根据当前训练状态自动调整学习率。
通过引入注意力机制,使得神经网络能够更加关注重要的特征信息。
为了进一步提高跟踪器的鲁棒性,本研究还采用了一种多目标融合的方法,将多个跟踪器的结果进行加权融合,从而得到更加准确的目标位置估计。
通过实验验证,本研究提出的方法在多种数据集上均取得了显著的性能提升,证明了其在单目标跟踪领域的有效性和可行性。
1.1 研究背景随着计算机视觉和深度学习技术的快速发展,目标跟踪在许多领域(如安防、智能监控、自动驾驶等)中发挥着越来越重要的作用。
单目标跟踪(MOT)算法是一种广泛应用于视频分析领域的技术,它能够实时跟踪视频序列中的单个目标物体,并将其位置信息与相邻帧进行比较,以估计目标的运动轨迹。
传统的单目标跟踪算法在处理复杂场景、遮挡、运动模糊等问题时表现出较差的鲁棒性。
为了解决这些问题,研究者们提出了许多改进的单目标跟踪算法,如基于卡尔曼滤波的目标跟踪、基于扩展卡尔曼滤波的目标跟踪以及基于深度学习的目标跟踪等。
这些方法在一定程度上提高了单目标跟踪的性能,但仍然存在一些局限性,如对多目标跟踪的支持不足、对非平稳运动的适应性差等。
开发一种既能有效跟踪单个目标物体,又能应对多种挑战的单目标跟踪算法具有重要的理论和实际意义。
1.2 研究目的本研究旨在设计一种基于多层特征嵌入的单目标跟踪算法,以提高目标跟踪的准确性和鲁棒性。
纹理物体缺陷的视觉检测算法研究--优秀毕业论文

摘 要
在竞争激烈的工业自动化生产过程中,机器视觉对产品质量的把关起着举足 轻重的作用,机器视觉在缺陷检测技术方面的应用也逐渐普遍起来。与常规的检 测技术相比,自动化的视觉检测系统更加经济、快捷、高效与 安全。纹理物体在 工业生产中广泛存在,像用于半导体装配和封装底板和发光二极管,现代 化电子 系统中的印制电路板,以及纺织行业中的布匹和织物等都可认为是含有纹理特征 的物体。本论文主要致力于纹理物体的缺陷检测技术研究,为纹理物体的自动化 检测提供高效而可靠的检测算法。 纹理是描述图像内容的重要特征,纹理分析也已经被成功的应用与纹理分割 和纹理分类当中。本研究提出了一种基于纹理分析技术和参考比较方式的缺陷检 测算法。这种算法能容忍物体变形引起的图像配准误差,对纹理的影响也具有鲁 棒性。本算法旨在为检测出的缺陷区域提供丰富而重要的物理意义,如缺陷区域 的大小、形状、亮度对比度及空间分布等。同时,在参考图像可行的情况下,本 算法可用于同质纹理物体和非同质纹理物体的检测,对非纹理物体 的检测也可取 得不错的效果。 在整个检测过程中,我们采用了可调控金字塔的纹理分析和重构技术。与传 统的小波纹理分析技术不同,我们在小波域中加入处理物体变形和纹理影响的容 忍度控制算法,来实现容忍物体变形和对纹理影响鲁棒的目的。最后可调控金字 塔的重构保证了缺陷区域物理意义恢复的准确性。实验阶段,我们检测了一系列 具有实际应用价值的图像。实验结果表明 本文提出的纹理物体缺陷检测算法具有 高效性和易于实现性。 关键字: 缺陷检测;纹理;物体变形;可调控金字塔;重构
Keywords: defect detection, texture, object distortion, steerable pyramid, reconstruction
II
多尺度特征融合提高目标检测速度
多尺度特征融合提高目标检测速度在现代计算机视觉领域,目标检测是一项核心任务,它涉及到从图像或视频中识别并定位感兴趣的对象。
随着深度学习技术的发展,基于卷积神经网络(CNN)的目标检测方法取得了显著的进展。
然而,随着目标检测任务的复杂性增加,如何提高检测速度成为一个重要的研究课题。
多尺度特征融合作为一种有效的技术手段,通过整合不同层次的特征信息,可以显著提升目标检测的速度和准确性。
一、目标检测技术概述目标检测技术旨在从图像或视频帧中识别出特定目标,并确定其位置。
传统的目标检测方法包括基于特征的方法和基于模型的方法。
基于特征的方法依赖于手工提取的特征,如SIFT、HOG等,而基于模型的方法则依赖于预先定义的目标模型。
随着深度学习技术的发展,基于CNN的目标检测方法逐渐成为主流,如R-CNN系列、YOLO和SSD等。
1.1 深度学习在目标检测中的应用深度学习,尤其是卷积神经网络(CNN),在图像识别和处理领域取得了革命性的进展。
CNN通过多层的卷积和池化操作,能够自动学习图像的层次化特征。
在目标检测任务中,CNN能够从图像中提取丰富的特征表示,为后续的目标识别和定位提供强有力的支持。
1.2 目标检测的挑战尽管基于深度学习的目标检测方法取得了显著的成果,但仍面临一些挑战:- 计算复杂性:深度学习模型通常需要大量的计算资源,这限制了它们在资源受限的设备上的部署。
- 实时性:在许多应用场景中,如视频监控、自动驾驶等,需要目标检测系统能够实时响应。
- 多尺度问题:目标在图像中可能出现在不同的尺度上,这要求检测系统能够处理不同大小的目标。
二、多尺度特征融合技术多尺度特征融合是一种通过结合不同尺度的特征信息来提高目标检测性能的技术。
在深度学习框架下,多尺度特征融合可以通过多种方式实现,包括特征金字塔网络(FPN)、多尺度输入、注意力机制等。
2.1 特征金字塔网络(FPN)特征金字塔网络(FPN)是一种流行的多尺度特征融合方法,它通过构建一个自顶向下的路径来融合不同尺度的特征。
用于目标检测的多头混合自注意力机制

用于目标检测的多头混合自注意力机制目录一、内容简述 (2)二、多头混合自注意力机制概述 (3)1. 自注意力机制简介 (4)2. 多头注意力机制 (5)3. 混合自注意力机制 (6)三、目标检测相关技术 (7)1. 传统目标检测方法 (8)2. 基于深度学习的目标检测方法 (9)3. 目标检测常用数据集与评价指标 (11)四、用于目标检测的多头混合自注意力机制 (11)1. 机制构建 (12)1.1 整体架构设计 (13)1.2 多头注意力模块设计 (14)1.3 混合自注意力模块设计 (15)2. 机制实现细节 (16)2.1 数据预处理与特征提取 (17)2.2 模型训练与优化方法 (19)2.3 模型评估与改进方向 (20)五、实验与分析 (22)1. 实验环境与数据集准备 (23)2. 实验方法与步骤介绍 (24)3. 实验结果分析讨论等总结性内容展示区按照您实验的详细步骤划分25一、内容简述随着深度学习技术的不断发展,目标检测作为计算机视觉领域的重要研究方向之一,受到了广泛的关注。
传统的目标检测方法主要依赖于手工设计的特征提取器,然而这些方法在面对复杂场景时往往表现不佳。
为了解决这一问题,本研究提出了一种用于目标检测的多头混合自注意力机制。
该机制的核心思想是将多头自注意力机制与混合策略相结合,旨在提高目标检测模型的性能和效率。
多头自注意力机制能够捕捉到输入序列的不同层次特征,从而有助于提高模型的表达能力。
而混合策略则通过将不同头的输出进行融合,使得模型能够充分利用各头的优势,进一步提高了检测精度。
我们设计了一种基于多头混合自注意力的目标检测模型,该模型通过引入多头自注意力机制,能够有效地捕捉到图像中的局部和全局信息,为目标的定位和识别提供了更加丰富的特征表示。
通过采用混合策略,我们将不同头的输出进行了有效融合,提高了模型的计算效率和检测速度。
实验结果表明,所提模型在多个数据集上均取得了优异的性能表现,为目标检测领域的发展提供了新的思路和方法。
基于时空卷积神经网络GL-GCN的交通流异常检测算法
2021年1月25日第5卷第2期现代信息科技Modern Information TechnologyJan.2021 Vol.5 No.2702021.1收稿日期:2020-11-29基金项目:国家自然科学基金资助项目(61 872230,61572311)基于时空卷积神经网络GL-GCN的交通流异常检测算法徐红飞,李婧(上海电力大学 计算机科学与技术学院,上海 200090)摘 要:交通流异常检测通常要考虑时间信息、空间信息等信息,这让交通流异常检测变得具有挑战性。
文章重点研究由交通事故、或短暂事件引起的非经常性交通异常检查。
新提出的算法(GL-GCN )利用交通的时空数据,空间信息采用图卷积网络捕获,时间依赖性采用深度神经网络DeepGLO 的方法建模。
同时捕捉时空特性并建立预测交通流模型,利用异常分数来判断交通流异常。
利用真实的交通流数据,证实了提出的模型具有有效性和优越性。
关键词:交通流;异常检测;深度神经网络;图卷积网络;时空特征中图分类号:TP39文献标识码:A文章编号:2096-4706(2021)02-0070-06Traffic Flow Anomaly Detection Algorithm Based on Spatiotemporal Convolution Neural Network GL-GCNXU Hongfei ,LI Jing(School of Computer Science and Technology ,Shanghai University of Electric Power ,Shanghai 200090,China )Abstract :Traffic flow anomaly detection usually considers time information ,spatial information and others ,which makestraffic flow anomaly detection challenging. This paper focuses on the non-recurrent traffic anomaly inspection caused by traffic accidents or short-term events. The new algorithm (GL-GCN )uses the spatiotemporal data of traffic ,the spatial information is captured by graph convolution network ,and the time dependence is modeled by DeepGLO neural network. This algorithm captures spatiotemporal characteristics at the same time and establishes the traffic flow prediction model ,and the traffic flow anomaly is judged by the anomaly score. The model is proved to be effective and superior by using the real traffic flow data.Keywords :traffic flow ;anomaly detection ;deep neural network ;graph convolutional network ;spatiotemporal characteristics0 引 言异常检测是数据挖掘的一个重要分支,是发现数据集中异常的现象,在金融、安全、医疗、执法等领域有着广泛的应用。
基于迁移学习的铁路场景异物侵限检测

基于迁移学习的铁路场景异物侵限检测近年来,随着铁路交通的不断发展,铁路安全问题日益受到人们的关注。
其中,异物侵限是铁路运行中的一个重要安全隐患。
为了保障铁路交通的安全运行,提高异物侵限检测的准确性和效率,研究者们开始探索基于迁移学习的方法。
迁移学习是一种将已学习到的知识和经验应用于新任务中的机器学习技术。
在铁路场景中,由于异物侵限数据集的获取较为困难,样本数量有限,因此传统的机器学习方法往往难以达到较高的准确性。
而迁移学习则可以通过从其他相关领域的数据中学习到的知识和特征,来提高铁路场景异物侵限检测的性能。
首先,迁移学习可以利用在其他领域获得的大量样本和丰富的特征信息,来辅助铁路异物侵限检测任务。
比如,可以使用图像识别领域的数据集进行预训练,提取出图像的基本特征和模式,然后将这些特征和模式迁移到铁路场景中进行异物侵限检测。
这样一来,可以避免在铁路场景中对大量数据进行标注和样本收集的困难。
其次,迁移学习可以通过将已学习到的模型参数应用于新的任务中,来加快铁路场景异物侵限检测的训练过程。
由于铁路场景中的数据量有限,传统的训练方法可能会导致过拟合问题。
而通过迁移学习,可以利用已训练好的模型参数,对新任务进行初始化,从而快速收敛并获得较好的性能。
最后,迁移学习还可以通过对异物侵限检测任务中的特定特征进行学习和迁移,来提高检测的准确性。
例如,对于铁路场景中的图像数据,可以通过预训练的模型,提取出与异物侵限相关的纹理、颜色、形状等特征,然后将这些特征迁移到异物侵限检测任务中进行进一步的训练和优化。
综上所述,基于迁移学习的铁路场景异物侵限检测方法具有很好的应用前景。
通过利用已学习到的知识和经验,迁移学习可以提高铁路场景异物侵限检测的准确性、效率和可靠性,为铁路交通的安全运行提供有力的支持。
随着技术的不断进步和应用的推广,相信基于迁移学习的铁路场景异物侵限检测方法将在未来得到进一步的发展和完善。
mlp提取空间特征
mlp提取空间特征
1. 数据预处理:在使用 MLP 提取空间特征之前,需要对输入数据进行预处理。
这可能包括对图像进行灰度变换、归一化、裁剪、翻转等操作,以便更好地适应 MLP 的输入要求。
2. 构建 MLP 模型:构建一个包含多个隐藏层的 MLP 模型。
模型的输入层应该与预处理后的数据维度相匹配,而输出层的节点数取决于要提取的特征数量。
3. 训练 MLP 模型:使用训练数据对 MLP 模型进行训练。
在训练过程中,可以使用反向传播算法来更新模型的权重和偏置,以最小化模型的预测误差。
4. 特征提取:一旦 MLP 模型训练完成,可以将输入数据送入模型中进行特征提取。
模型的输出可以被视为提取的空间特征,这些特征可以用于后续的任务,如分类、聚类等。
5. 特征评估:为了评估提取的空间特征的质量,可以使用一些标准的评估指标,如准确率、召回率、F1 分数等。
此外,还可以将提取的特征与其他特征提取方法进行比较,以确定 MLP 方法的优势和劣势。
需要注意的是,MLP 提取空间特征的效果很大程度上取决于模型的结构、训练数据的质量以及模型的超参数设置等因素。
因此,在实际应用中,需要对这些因素进行仔细的调整和优化,以获得更好的特征提取效果。
如何解决使用机器学习技术进行目标检测时的漏检问题
如何解决使用机器学习技术进行目标检测时的漏检问题目标检测是机器学习领域中的一个重要任务,其目的是在图像或视频中准确地定位和识别出感兴趣的目标对象。
然而,在实际应用中,使用机器学习技术进行目标检测时,常常会遇到漏检的问题,也就是无法将某些目标正确地识别出来。
本文将探讨如何解决使用机器学习技术进行目标检测时的漏检问题。
漏检是目标检测中常见的问题之一,特别是在目标较小、目标外形复杂、目标与背景颜色相近或光照条件不理想的情况下更为明显。
漏检的原因可以归结为以下几个方面:特征表示不充分、目标检测模型的泛化能力不足、数据集不平衡以及标注不准确等。
为了解决漏检问题,一种常用的方法是改进特征表示。
传统的目标检测算法通常采用手工设计的特征,这种方法对于复杂的目标通常表现不佳。
近年来,深度学习技术的兴起为目标检测带来了新的突破。
深度学习可以自动地从大量的数据中学习到高层次的特征表示,使得目标检测模型能够更好地适应不同的目标。
因此,使用深度学习技术提取特征往往能够显著改善目标检测的性能,减少漏检问题的发生。
另一种解决漏检问题的方法是提升检测模型的泛化能力。
目标检测模型的泛化能力决定了其在未见过的数据上的表现。
为了提升检测模型的泛化能力,可以采取以下几种方法。
首先,增加训练数据的多样性,包括不同场景下的图像、不同角度和尺度的目标等。
其次,通过数据增强技术来扩充训练数据集,例如随机裁剪、翻转、旋转等。
此外,引入迁移学习的思想,将在其他任务上训练好的模型参数作为目标检测模型的初始参数,能够加速模型的收敛并提高泛化能力。
数据集不平衡也是导致漏检问题的一个重要原因。
对于目标检测任务来说,正样本一般较少,而负样本往往非常丰富。
这会导致模型过于偏向于预测负样本,忽略了正样本的重要信息,从而产生漏检现象。
为了解决数据集不平衡问题,可以采用以下几种策略。
首先,采用合适的采样方法来平衡正负样本的数量,如欠采样、过采样、正负样本的加权等。
yolov5多尺度特征融合算法
yolov5多尺度特征融合算法一、前言随着计算机视觉技术的不断发展,目标检测已经成为了计算机视觉领域中的一个重要研究方向。
而在目标检测领域中,YOLO系列算法一直是备受瞩目的算法之一。
其中,YOLOv5是YOLO系列算法中最新发布的版本,相比于之前的版本,它在速度和精度上都有了较大的提升。
本文将主要介绍YOLOv5中多尺度特征融合算法。
二、多尺度特征融合在目标检测中,多尺度特征融合是一个非常重要的问题。
因为不同层次的特征对于不同大小和形状的物体具有不同的敏感性。
因此,在进行目标检测时,需要将这些不同层次的特征进行融合,以便更好地识别出各种大小和形状的物体。
在YOLOv5中,多尺度特征融合主要分为两个阶段:下采样和上采样。
1. 下采样下采样是指将输入图像缩小到较小尺寸以提高计算效率。
在YOLOv5中,下采样主要通过卷积和池化操作实现。
具体来说,YOLOv5使用了深度可分离卷积(Depthwise Separable Convolution)来减少计算量。
同时,为了保持特征的丰富性,YOLOv5还采用了跨层连接(Skip Connection)的方式将不同层次的特征进行融合。
2. 上采样上采样是指将下采样后得到的特征图恢复到原始大小。
在YOLOv5中,上采样主要通过反卷积操作实现。
为了使得反卷积后的特征图更加准确,YOLOv5还使用了插值操作和通道填充操作。
三、多尺度特征融合算法在YOLOv5中,多尺度特征融合算法主要包括两个模块:FPN (Feature Pyramid Network)和PAN(Path Aggregation Network)。
1. FPNFPN是一种常用的多尺度特征融合算法。
它通过构建金字塔结构来获取不同尺度的特征,并通过跨层连接将这些不同尺度的特征进行融合。
在YOLOv5中,FPN主要由以下三个部分组成:(1)底部网络:底部网络负责提取原始图像中的低级别特征。
(2)顶部网络:顶部网络负责提取原始图像中的高级别特征。
Outlier Detection for High Dimensional Data

多目标检测算法原理的应用
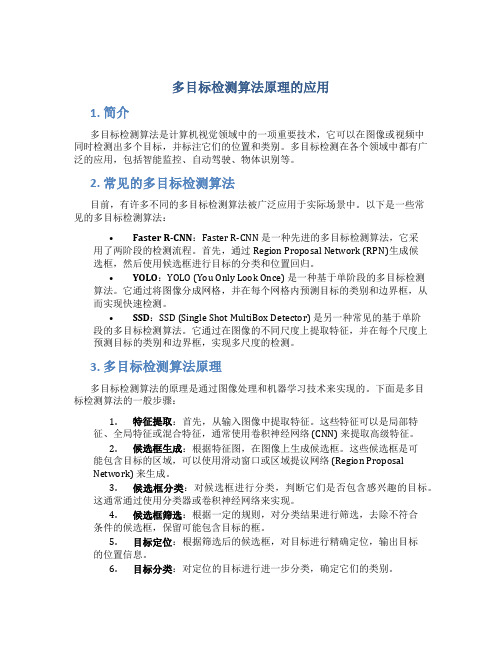
多目标检测算法原理的应用1. 简介多目标检测算法是计算机视觉领域中的一项重要技术,它可以在图像或视频中同时检测出多个目标,并标注它们的位置和类别。
多目标检测在各个领域中都有广泛的应用,包括智能监控、自动驾驶、物体识别等。
2. 常见的多目标检测算法目前,有许多不同的多目标检测算法被广泛应用于实际场景中。
以下是一些常见的多目标检测算法:•Faster R-CNN:Faster R-CNN 是一种先进的多目标检测算法,它采用了两阶段的检测流程。
首先,通过Region Proposal Network (RPN)生成候选框,然后使用候选框进行目标的分类和位置回归。
•YOLO:YOLO (You Only Look Once) 是一种基于单阶段的多目标检测算法。
它通过将图像分成网格,并在每个网格内预测目标的类别和边界框,从而实现快速检测。
•SSD:SSD (Single Shot MultiBox Detector) 是另一种常见的基于单阶段的多目标检测算法。
它通过在图像的不同尺度上提取特征,并在每个尺度上预测目标的类别和边界框,实现多尺度的检测。
3. 多目标检测算法原理多目标检测算法的原理是通过图像处理和机器学习技术来实现的。
下面是多目标检测算法的一般步骤:1.特征提取:首先,从输入图像中提取特征。
这些特征可以是局部特征、全局特征或混合特征,通常使用卷积神经网络 (CNN) 来提取高级特征。
2.候选框生成:根据特征图,在图像上生成候选框。
这些候选框是可能包含目标的区域,可以使用滑动窗口或区域提议网络 (Region ProposalNetwork) 来生成。
3.候选框分类:对候选框进行分类,判断它们是否包含感兴趣的目标。
这通常通过使用分类器或卷积神经网络来实现。
4.候选框筛选:根据一定的规则,对分类结果进行筛选,去除不符合条件的候选框,保留可能包含目标的框。
5.目标定位:根据筛选后的候选框,对目标进行精确定位,输出目标的位置信息。
基于相似度计算的物联网传输流丢包节点检测
基于相似度计算的物联网传输流丢包节点检测
童星
【期刊名称】《计算机仿真》
【年(卷),期】2022(39)5
【摘要】针对传统丢包节点检测方法存在的检测效率低、丢包节点定位精准度差、节点转发率低的问题,设计一种基于相似度计算的物联网传输流丢包节点检测方法。
首先构建传感器节点分布模型,并运用二元有向图对其描述,然后根据传输关联信息
熵结果创建传输任务信道分布模型;在此基础上,根据丢包节点检测的基本原理对未
知分类的节点实施分类检测,并且计算出每个分类的最大似然值,最后对节点进行感
测向量检测处理,并将跨度和实际节点之间的相似度作为对应的判定标准,完成丢包
节点检测。
仿真结果表明:与传统检测方法相比,该方法检测过程效率更高,且通过相似度计算提高了丢包节点定位的精准度,确保了较高的节点转发率,能够很好地适用
于对物联网传输任务的检测。
【总页数】5页(P388-392)
【作者】童星
【作者单位】青岛理工大学
【正文语种】中文
【中图分类】TP391.1
【相关文献】
1.基于物联网的透明传输移动环境勘探节点设计
2.基于节点认证的物联网感知层信息安全传输机制的研究
3.延时容忍网络中基于热点区域间节点流数据传输方案
4.基于相似度计算的计算机网络内部丢包节点检测方法
5.基于信任管理的物联网节点信息安全传输研究
因版权原因,仅展示原文概要,查看原文内容请购买。
基于自注意力深度哈希的海量指纹索引方法
基于自注意力深度哈希的海量指纹索引方法
吴元春;赵彤
【期刊名称】《计算机工程与应用》
【年(卷),期】2022(58)18
【摘要】现有的指纹索引方法大多是基于实数值特征向量,当应用于大规模指纹库时无法避免计算资源与存储空间消耗巨大的问题。
为了在海量指纹库中进行高效快速检索并得到实时响应结果,提出了一种全新的基于有监督深度哈希的指纹索引方法。
将传统指纹领域知识与自注意力深度哈希模型相结合。
传统领域知识用于指纹图像预处理来获取指纹二值骨架图,自注意力深度哈希模型进行特征提取与哈希映射得到二进制编码。
其中特征提取模块使用Transformer结构替换卷积神经网络来提取指纹细节特征,此外模型中加入了自动对齐模块并设计了一种STN-AE的结构来辅助训练该模块。
最后在NIST4、NIST14、FVC2000、FVC2002、
FVC2004等公开指纹数据集上进行了实验,实验结果证实该方法在提高海量指纹库中的检索速度以及降低存储消耗等方面是卓有成效的。
【总页数】10页(P241-250)
【作者】吴元春;赵彤
【作者单位】中国科学院大学计算机科学与技术学院;中国科学院大学数学科学学院;中国科学院大数据挖掘和知识管理重点实验室
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于相对距离哈希方法的一种高维索引
2.一种基于子空间学习的图像语义哈希索引方法
3.一种基于图像感知哈希的海量恶意代码分类方法
4.基于稀疏索引和哈希表的访问控制策略检索方法
5.基于注意力机制的医学影像深度哈希检索算法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于局部复杂度的视频序列显著点提取方法
基于局部复杂度的视频序列显著点提取方法
陈卓夷
【期刊名称】《计算机工程与应用》
【年(卷),期】2006(42)29
【摘要】文中提出一种基于局部复杂度视频序列中显著点的提取方法.首先,将视觉认知中的注意力机制引入视频处理,通过计算空域像素局部复杂度来提取图像显著点.其次,利用均值漂移聚类方法在时域中对显著点进行聚类,从而去除了分散的噪声点,它能自动确定类别数并具有严格的收敛性,该方法减少了运算量,提高了运算速度.实验证明,该方法提取的结果与人的视觉感知系统具有较好的一致性.
【总页数】4页(P187-189,201)
【作者】陈卓夷
【作者单位】邯郸学院计算机系,河北,邯郸,056005
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于显著图的红外图像显著轮廓提取方法研究 [J], 苏爱柳;徐贵力;蔡博;贾银亮;李开宇
2.基于空间分布特性和局部复杂度的显著目标检测算法 [J], 胡正平;孟鹏权
3.视频序列中基于多尺度时空局部方向角模式直方图映射的表情识别 [J], 付晓峰;付晓鹃;李建军;余正生
4.基于全局和局部特征融合的显著性提取方法 [J], 王红艳;高尚兵
5.基于局部层次化混合高斯模型的视频序列运动目标检测 [J], 王威;张鹏;高伟;王润生
因版权原因,仅展示原文概要,查看原文内容请购买。
基于注意力门残差网络的遥感影像道路提取

基于注意力门残差网络的遥感影像道路提取
李文书;李绅皓;赵朋
【期刊名称】《智能计算机与应用》
【年(卷),期】2022(12)10
【摘要】针对遥感影像道路提取出现的无关噪声多,道路不连续问题,本文通过改进U-Net提出了基于注意力门残差网络的道路提取算法。
首先,编码器部分引入残差块传递原始特征,在保证网络深度的同时,使梯度能够有效传递;其次,在连接层使用多尺度空洞卷积特征提取模块,来充分挖掘图像中的多尺度特征信息;最后,用注意力门将浅层网络信息和反卷积信息融合实现解码,以抑制浅层噪声特征。
使用的数据集包括Massachusetts Roads Dataset数据集和CVPR DeepGlobe 2018道路提取挑战赛数据集。
实验结果表明,该算法可以有效提升道路分割的效果。
【总页数】6页(P31-35)
【作者】李文书;李绅皓;赵朋
【作者单位】浙江理工大学信息学院
【正文语种】中文
【中图分类】TP391.1
【相关文献】
1.利用深度残差网络的遥感影像建筑物提取
2.基于孪生残差神经网络的遥感影像变化检测
3.基于残差网络的遥感影像松材线虫病自动识别
4.引入残差和注意力机制
的U-Net模型在水土保持遥感监管人为扰动地块影像自动分割中的研究5.注意力机制结合残差收缩网络对遥感图像分类
因版权原因,仅展示原文概要,查看原文内容请购买。
双阈值法地面激光点云强度图像边缘提取
双阈值法地面激光点云强度图像边缘提取
谭凯;程效军
【期刊名称】《同济大学学报(自然科学版)》
【年(卷),期】2015(043)009
【摘要】在扩展目标激光测距方程的基础上,根据扫描仪的辐射机制,分析了利用强度图像进行点云边缘提取的可行性及强度图像中非边缘点、边缘点及噪声点的八邻域特征.根据各类点的八邻域特征,提出了一种双阈值判别准则,用于提取强度图像中的非边缘点、边缘点与噪声点.根据判别结果:对非边缘点与噪声点进行中值滤波;对边缘点,其灰度值保持不变.最后利用Canny算子对滤波后的强度图像进行边缘提取,并通过实验对该方法进行了验证,对不同的双阈值选取结果进行了讨论分析.实验结果表明:利用原始激光强度图像可有效实现地面激光点云的边缘提取,双阈值法不仅能去除点云强度图像中的椒盐噪声,同时能保证边缘提取的精度.
【总页数】7页(P1425-1431)
【作者】谭凯;程效军
【作者单位】同济大学测绘与地理信息学院,上海200092;同济大学测绘与地理信息学院,上海200092
【正文语种】中文
【中图分类】P232
【相关文献】
1.基于数字图像相关方法的含双裂纹复合材料薄板应力强度因子测量 [J], 郝文峰;原亚南;姚学锋;马寅佶
2.地面激光点云强度噪声的三维扩散滤波方法 [J], 张毅;闫利
3.一种基于中心投影的地面激光雷达反射强度图像的生成方法 [J], 胡春梅;李天烁
4.图像平滑在地面激光点云与影像融合中的应用 [J], 胡春梅;李天烁
5.双旁路耦合电弧GMAW熔池图像边缘提取算法 [J], 薛诚;石玗;樊丁;李卫东因版权原因,仅展示原文概要,查看原文内容请购买。
基于泊松图像融合的自监督缺陷检测方法

基于泊松图像融合的自监督缺陷检测方法
陈腾飞;戴元杰;廖杜杰;朱志鹏;吴健辉
【期刊名称】《湖南理工学院学报(自然科学版)》
【年(卷),期】2024(37)1
【摘要】提出一种基于泊松图像融合的自监督缺陷检测方法,采用泊松图像融合对无标注的正常样本进行数据增强,生成多样化的、更贴近实际的模拟缺陷样本,解决缺陷样本数量少且不易标注的问题.结合缺陷样本的特征提出一种CANet网络,引入卷积注意力模块对编码器—解码器结构进行优化,防止采样过程中的信息丢失,并在网络末端添加掩码卷积层以提高输入数据的重建精度.在MV Tec数据集上进行实验,总体检测AUROC达到96.1%;通过与三种典型检测方法的比较,证明所提方法的有效性且具备较好的泛化性,能满足工业生产中不同种类产品的表面缺陷检测要求.
【总页数】7页(P27-33)
【作者】陈腾飞;戴元杰;廖杜杰;朱志鹏;吴健辉
【作者单位】三维重建与智能应用技术湖南省工程研究中心;湖南理工学院机械科学与工程学院;湖南理工学院信息科学与工程学院
【正文语种】中文
【中图分类】TP391.4
【相关文献】
1.基于图像融合分割的实木地板表面缺陷检测方法
2.基于红外与可见光图像融合的苹果表面缺陷检测方法
3.独立泊松序列与指数序列的变点检测方法比较
4.基于泊松融合数据增强的焊缝金相组织缺陷分类研究
5.基于红外和可见光图像融合的铺丝缺陷检测方法
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Computational Statistics&Data Analysis44(2004)625–638/locate/csda Outlierdetection in the multiple clustersetting using the minimum covariance determinantestimatorJohanna Hardin a;∗,David M.Rocke ba Department of Mathematics,Pomona College,610N.College Ave.,Claremont,CA91711,USAb Center for Image Processing and Integrated Computing,University of California at Davis,USAReceived1January2002;received in revised form1August2002AbstractMahalanobis-type distances in which the shape matrix is derived from a consistent high-breakdown robust multivariate location and scale estimator can be used toÿnd outlying points. Hardin and Rocke(/∼dmrocke/preprints.html)developed a new method foridentifying outlier s in a one-clustersetting using an F distribution.We extend the method to the multiple cluster case which gives a robust clustering method in conjunction with an outlier identiÿcation method.We provide results of the F distribution method for multiple clusters which have di erent sizes and shapes.c 2002Elsevier B.V.All rights reserved.Keywords:Minimum covariance determinant;Robust clustering;Outlier detection1.IntroductionGood methods for identifying clusters of well-separated uncontaminated groups of data have been available for many years.The process of clustering becomes more di cult,however,when the data include points which do not belong to any cluster. (Everitt,1993)Outlying points can skew the shape estimates of the clusters or distort optimization criterion which in turn can mask separation between clusters.A group of diabolically placed points can completely change the cluster arrangement under many clustering algorithms.∗Corresponding author.Fax:+909-607-8717.E-mail addresses:jo.hardin@(J.Hardin),dmrocke@(D.M.Rocke).0167-9473/$-see front matter c 2002Elsevier B.V.All rights reserved.PII:S0167-9473(02)00280-3626J.Hardin,D.M.Rocke/Computational Statistics&Data Analysis44(2004)625–638 Robust clustering methods often give an accurate depiction of the underlying data format,but even so,they do not usually identify particular outlying points which may be of interest or importance in their own right.Along with robust clustering methods, it is important to have a complimentary outlier identiÿcation method.Various method for detecting outliers in the one cluster multiple dimensional set-ting have been studied(Atkinson,1994;Barnett and Lewis,1994;Gnanadesikan and Kettenring,1972;Hadi,1992;Hawkins,1980;Maronna and Yohai,1995;Penny,1995; Rocke and Woodru ,1996;Rousseeuw and VanZomeren,1990).One way to identify possible multivariate outliers is to calculate a distance from each point to a“center”of the data.An outlierwould then be a point with a distance lar gerthan some pr ede-termined value.A conventional measurement of quadratic distance from a point X to a location Y given a shape S,in the multivariate setting isd2S(X;Y)=(X−Y)T S−1(X−Y):This quadratic form is often called the Mahalanobis squared distance(MSD).In the clustering context,an outlier can be thought of as a point with a large MSD from the center of each and every one of the clusters.After a robust clustering algorithm is applied to the data,each of the clusters can be thought of as coming from a unique population,and outlieridentiÿcation methods can be used individually on each cluster. For data that come from one population,the distribution of the MSD with both the true location and shape parameters and the conventional location and shape parameters is well known(Gnanadesikan and Kettenring,1972).However,the conventional loca-tion and shape parameters are not robust to outliers,and the distributionalÿt breaks down when robust measures of location and shape are used in the MSD(Rousseeuw and VanZomeren,1990).Hardin and Rocke(2002)developed a distributionalÿt to Mahalanobis distances which uses a robust shape and location estimate,namely the minimum covariance determinant(MCD).Given n data points,the MCD of those data is the mean and covariance matrix based on the sample of size h(h6n)that minimizes the determinant of the covariance matrix (Rousseeuw,1984).MCD=( X∗J;S∗J);whereJ={set of h points:|S∗J|6|S∗K|∀sets K s:t:#|K|=h}where#|!|deÿnes the numberof elements in set!X∗J =1hi∈Jx iS∗J=1hi∈J(x i− X∗J)(x i− X∗J)tThe value h can be thought of as the minimum numberof points which must not be outlying.The MCD has its highest possible breakdown at h= (n+p+1)=2 where · is the greatest integer function(Rousseeuw and Leroy,1987;Lopuha a andJ.Hardin,D.M.Rocke/Computational Statistics&Data Analysis44(2004)625–638627 Rousseeuw,1991).We will use h= (n+p+1)=2 in ourcalculations and r efer to a sample of size h as a half sample.The MCD is computed from the“closest”half sample,and therefore,the outlying points will not skew the MCD location or shape estimates.The concept of the MCD can be modiÿed easily toÿt the multiple clustersetting.With a good initialization and a known numberof cluster s,g,the MCD can be found separately for each of the clusters.The size of each cluster is determined by the number of points which are closer to that cluster’s center than to any otherclustercenter.The sizes of the cluster s and the MCD samples will be n i and h i= (n i+p+1)=2 i=1;:::;g,respectively.Using the MCD estimates in the MSD leads to robust distances from each of the clustercenter s foreach of the data points.A datum which is outlying will have a large robust distance from each of the cluster centers.However,not every data set will give rise to an obvious separation between extreme points which belong to the data set (i.e.are not outliers)and those which do not(i.e.are outliers.)In order to distinguish between these two types of extrema,outliers can be identiÿed using the quantiles of an F distribution(Hardin and Rocke,2002)on a clusterby clusterbasis.An outlying point will be labeled as such only if it is outlying with respect to all of the clusters. Note that throughout this paper,the number of groups is assumed to beÿxed and known.This assumption is malleable in that additional small clusters will be ignored in the robust analysis,so they will not have an impact on estimating the g principal clusters.If an analyst is unsure of the number of populations present in the data,it is wise to try the analysis on a variety of values for the number of clusters.We will apply cuto values to multi-cluster,multivariate normal data given di erent values of g;n;p,and di erent arrangements and percentages of outlying points.2.Clustering methodsMany algorithms exist for clustering various types of data.These algorithms use data,multivariate or univariate,as input,and as output the algorithm gives each datum a classiÿcation into a particular group.Some algorithms require that the number of clusters be pre-speciÿed,and some algorithms allow for an unknown number of clusters. Those algorithms that do require as input a number of groups can be run multiple times with di er ent values forthe numberof gr oups.The usercan then choose the r esult that makes the most sense according to the problem or according to some statistical criterion.Finding an appropriate criterion may prove to be a hard problem.For the method we use,ÿnding the correct number of groups for a particular data set is beyond the scope of this work.Our methods are applicable to data with no known structure or a priori metric,so we restrict out work to partitioning clustering methods,and we disregard hierarchical clustering methods for the time being.These methods can be used toÿnd a bestÿt to a problem with a given number of groups.2.1.Robust optimization clusteringThe clustering method we used assumes only that the clusters are elliptical.(The outlier identiÿcation methods,however,are calibrated at the multivariate normal.)Since628J.Hardin,D.M.Rocke/Computational Statistics&Data Analysis44(2004)625–638the cluster shape is estimated from assigned points,it is required that p+1points be assigned to each of the main clusters.However,this method allows for unassigned points,so ther e could easily be allowed a clusterof points which is smallerthan p+1 included in the group of outlying points.A program,called CLUSTER,implementing this method is described in(Reiners and Woodru ,2001).3.Robust estimators in a cluster settingEstimating clusterlocation and shape,even when the clustermember ship is known,is a di cult problem if outliers are present(Rocke and Woodru ,1996).Since clustering methods need also to assign points to clusters as well as simultaneously estimate the cluster location and shape,the problem of cluster analysis in the presence of outliers is even more di cult.3.1.A ne equivariant estimatorsWe are particularly interested in a ne equivariant estimators of the data.A location estimator y n∈R p is a ne equivariant if and only if for any vector v∈R p and any nonsingular p×p matrix M,y n(M x+v)=My n(x)+v:A shape estimator S n∈PDS(p)(the set of p×p positive deÿnite symmetric matrices) is a ne equivariant if and only if for any vector v∈R p and any nonsingular p×p matrix M,S n(M x+v)=MS n(x)M T:Stretching or rotating the data will not change an a ne estimate of the data.If the location and shape estimates are a ne equivariant,the MSDs are a ne invariant, which means the shape of the data determines the distances between the points.The only other real alternative to a ne estimates is to make a prior assumption about the correct distance measure.It is important to have a ne equivariant estimators so that the measurement scale,location,and orientation can be ignored.Since MSDs are a ne invariant,the properties and procedures that use the MSD can be calculated without loss of generality for standardized distributions.For the properties under normality,we can use N(0,I).3.2.Minimum covariance determinantThe MCD location and shape estimates are used as robust estimates of the location and shape of the clusters.Points that are outliers with respect to a particular cluster will not be involved in the location and shape calculations of that cluster,and points that are outliers with respect to all clusters will not be involved in the calculations of any clusters.The di erence between the single population case and the multiple cluster case is that,in the latter,MCD samples need to be computed for each cluster.ThisJ.Hardin,D.M.Rocke /Computational Statistics &Data Analysis 44(2004)625–638629important di erence leads to a need for a good robust starting point in the clustering situation.3.3.Estimating the MCDThe exact MCD is impossible to ÿnd except in small samples ortr ivial cases.So,the algorithm used to estimate the MCD will be the estimator.The algorithm used in the multiple clustercase will be similarto the single population algor ithm (Hawkins,1999;Rousseeuw and VanDriessen,1999)with the exception that the start-ing point of the algorithm will no longer be a random sub-sample of the data.The reason that it is important to have a non-random starting point for robust clustering is that random starts often give rise to shapes that are more representative of the entire data metric than the individual cluster metrics.Even with random samples of only g ×(p +1)points (where g is the numberof cluster s and p is the dimension),it is highly unlikely that a random starting point would partition the points into their g clusters respectively.From a starting point which re ects the entire data metric,it is di cult to separate the points into the correct g clusters.For a robust start,we used the method of Reiners and Woodru (2001)discussed previously.The outlier detection methods described in this paper are not dependent on the particular robust clustering algorithm CLUSTER .Any robust initialization would presumably give similar results.Random starts could be used if a condition was added to prevent the clusters from converging to the large dataset shape.The core of the MCD estimation algorithm is as follows:•Let H 1be a subset of h points.•Find XH 1and S H 1.(If det(S H 1)=0then add points to the subset until det(S H 1)¿0.)•Compute the distances d 2S H 1(x i ; X H 1)=d 2H 1(i )and sort them for some permutationsuch that,d 2H 1( (1))6d 2H 1( (2))6···6d 2H 1( (n )):•H 2:={ (1); (2);:::; (h )}Foreach dataset,the complete pr ocedur e forcalculating the MCDs foreach clusterisas follows.1.Decide from how many populations the data came.e the program CLUSTER (or similar clustering algorithm)to ÿnd an initial robust clustering of the data.3.From the initial clustering,calculate the mean and covariance of each of the clusters.(Each point belongs to at most one cluster,use the points belonging to a particular clusterto calculate its mean and covar iance in the usual way.)4.Calculate the MSD to each cluster,based on the most recently calculated mean and covariance,for each point in the dataset.5.Assign each point to the clusterforwhich it has the smallest MSD,ther eby deter -mining a clustersize (n j )foreach clusterbased on the numberof points that ar e closest to that cluster.630J.Hardin,D.M.Rocke /Computational Statistics &Data Analysis 44(2004)625–6386.Foreach cluster ,choose a “half sample”(h j = (n j +p +1)=2 )of those points with the smallest MSDs from step 4.7.For each cluster,compute the mean and covariance of the current half sample.8.Repeat steps 4–7until the half sample no longerchanges.9.Report estimates.Foreach cluster ,the MCD sample will then be the ÿnal half sample (step 6).Foreach cluster(j ),a robust distance like d 2S ∗j (x i ; X ∗j ),where S ∗j and X ∗j are the MCDshape and location estimates forcluster j ,is likely to detect outliers because outlying points will not a ect the MCD shape and location estimates.Forpoints x i that areextreme,d 2S ∗j (x i ; X ∗j )will be large for all j ,and forpoints x i that are not extreme,d 2S ∗j(x i ; X ∗j )will not be large for a particular j .We note that this algorithm may not converge for clusters with signiÿcant overlap.In this case,a model based likelihood algorithm should be used with the identiÿed outliers classiÿed as noise (or removed)and an iteration step that includes the model based algorithm each time instead of simply the partitioning given by the distances.4.Distance distributions4.1.Single population distance distributionsMSDs give a one-dimensional measure of how far a point is from a location with respect to a ing MSDs we can ÿnd points that are unusually far away from a location and call those points outlying.Unfortunately,using robust estimates gives MSDs with unknown distributional properties.In Hardin and Rocke (2002),an approximate distributional result for MSDs based on location and shape derived from an MCD sample is given.Although the robustdistances are asymptotically 2p ,an F distribution ÿts the extreme points much more accurately across all sample sizes but especially in small samples.The distances based on the MCD metric can be expressed asc (m −p +1)pmd 2S ∗X (X i ; X∗)·∼F p;m −p +1;(4.1)where X∗and S ∗X are the location and shape estimates of the MCD sample,p is the dimension of the sample,and m and c are both parameters based on the size and shape of the MCD sample.The unknown parameters,m and c ,can be estimated in three ways:using simulations,using an asymptotic result,or using an adjustment to the asymptotic result.The simulation results are the most accurate but also the most time consuming.The parameter c can be estimated byc =P ( 2p +2¡ 2(p;h=n ))h=n;J.Hardin,D.M.Rocke/Computational Statistics&Data Analysis44(2004)625–638631 where 2 is a Chi-Square random variable with degrees of freedom,and 2 ; is the quantile fora 2 random variable(Croux and Haesbroeck,1999).We treat the extreme points as e ectively independent of the MCD estimates,since they have little orno e ect on the estimates themselves(Hardin and Rocke,2002).For m there exists an asymptotic expression that is good in large samples and only moderately accurate in small samples(Croux and Haesbroeck,1999).Forsmall sam-ples,an adjustment to the parameter is provided using a linear equation to estimate m more accurately.The following interpolation formula is used to modify the theoretical parameter value of the degrees of freedom(Hardin and Rocke,2002).m pred=m asy·e(0:725−0:00663p−0:0780ln(n));(4.2) where m pred is the predicted degrees of freedom from adjusting the asymptotic degrees of freedom,m asy,given by Croux and Haesbroeck(1999).Croux and Haesbroeck used in uence functions to determine an asymptotic expression for the variance elements of the MCD sample.Details are given in Appendix A.In this paperwe use only the theoretical and adjusted parameter estimates in the interest of computing time.The empirical results for m hold forclustersample sizes in the hundr eds.Forclustersample sizes in the thousands,the asymptotic value of m should be used.4.2.Multiple population distance distributionsUsing the same arguments from the single population setting in the cluster setting, an F distribution can be used to approximate distances which are large with respect to a cluster location and shape.However,in this setting there are new factors to consider such as how many points ar e in each clusterand whetherextr eme points simply belong to anothercluster.In the single clustercase,the sample size of the dataset is used in the F cuto calculation.Therefore,in the multiple cluster case,a sample size must be known or estimated for each cluster.The sample size also determines the“h”parameter used in the MCD calculation.The sizes from theÿnal MCD iteration(step5in Section3.3) will be used as the sizes of each of the clusters.The last MCD iteration also provides a robust location and shape for each cluster,these estimates are used to compute distances from each cluster.For a particular point,the distance from each cluster center will be found,and a point will be counted in the clusterforwhich its distance is the smallest.#in cluster j=n j=ni=1I(d2S∗j(X i; X∗j)6d2S∗k(X i; X∗k)∀k=1;:::;g groups);where X∗j and S∗j are the location and shape estimates of the MCD sample,and m j and c j are both parameters based on the size and shape of the MCD sample from the j th cluster.With these constructs in mind,the distances of interest are those associated with the clusterto which a point is closest.Let˜d i be the distance from point x i to the closest cluster.An outlying point,x i,will be one with˜d i greater than some cuto value.632J.Hardin,D.M.Rocke/Computational Statistics&Data Analysis44(2004)625–638 Consider g groups of multivariate normal data in dimension p,and let X ij∼N p( j; j)where i=observation and j=cluster.Let S j be an estimate of j such that,m j S j·∼Wishart p( j;m j).Forthe multiple clustercase,c j=P( 2p+2¡ 2p;hj=n j)h j=n jandc j(m j−p+1)pm j d2S∗j(X i; X∗j)·∼F p;mj−p+1:Distributional cuto results for distances based on the above type of clustered data with four di erent types of outlier arrangements:none,cluster,radial,and di use are given.5.ResultsOutliers can be identiÿed as points with robust distances that exceed some cuto value.The cuto s are computed from distributional quantiles of 2and F distributions. Becauseÿnding estimates for the parameters m and c by simulation is so computation-ally intensive,results are provided only for the F cuto with theoretical and adjusted estimates for m and forthe 2p cuto .To compare the accuracy of these three esti-mates,we ran experiments on clean multivariate normal data and also on contaminated multivariate normal data.The contamination was done in three ways:1.As a distinct clusterof outlier s.2.As radial outliers.3.As di use outliers generated using a covariance structure equal to the entire dataset. The Monte Carlo experiments were done at p=4;7;10with g=2;3forthe clean data and g=2forthe contaminated data.Let n p g be the size of the groups simulated fora par ticulardimension(p)and numberof gr oups(g).(In the interest of brevity, only results for the balanced case are reported.The unbalanced sample size results are equivalent to those reported for the equal sample sizes.)n42=300;300and200;400n43=300;300;300and200;300;400n72=500;500and300;700n73=500;500;500and300;500;700n102=500;500and300;700n103=500;500;500and300;500;700J.Hardin,D.M.Rocke/Computational Statistics&Data Analysis44(2004)625–638633 Table1Clean data(2and3clusters)2Clusters3ClustersBalanced Balanced 1%F40.630.64P70.810.82100.800.81 1%Adj F40.910.90P70.990.99100.96 1.00 1%Chisq421.6621.57P717.9417.881017.5917.30 Each entry represents the percent of simulated data that was misclassiÿed according to a speciÿed cuto and percentage.Theÿrst column reports data that come from two populations,and the second column reports data that come from three populations.Balanced refers to data that consist of equal sized clusters;results were similar for unbalanced clusters.These data were generated as clusters of multivariate normal data with no contamination.The analysis was done using the MCD estimates.Results were equivalent for cuto s at the5%and0.1%level.The cluster centers were separated by a distance of2D where D=2p;:99=p.The value2p;:99is the asymptotic radius of a99%containment ellipsoid around a cluster of standard normal data.By separating the clusters at a distance of2D,we have clusters that do not overlap with high probability.In a clustersituation the size of the entir e dataset is known,but the size of the individual clusters in not known.Therefore,the clustering algorithm must be applied before outliers can be identiÿed.In the clustering algorithm n j,the numberof points belonging to cluster j,is determined.From n j we apply the theoretical formulas given for m j and c j,and we calculate the adjustment for m j.The cuto values for5%,1% and0.1%rejection are calculated for F p;mj−p+1(with both variants of m)and 2p. 5.1.Clean dataForeach combination of size,dimension,and numberof cluster s100sets of inde-pendent data were simulated,and the number of points the cuto s identiÿed as outlying was counted.(The numberof independent data sets is small due to the computational intensity of the initial clustering algorithm.)The tabulated results in Table1report the percentage of data identiÿed as outlying foreach nominal level at p=4;7;10and clustersizes as mentioned above.The F cuto results are much closer to the target signiÿcance level than the 2p cuto s,and the adjusted cuto is the most accurate.Also,because the cluster sizes are relatively large,the asymptotic F cuto is only slightly conservative.634J.Hardin,D.M.Rocke /Computational Statistics &Data Analysis 44(2004)625–6385.2.Contaminated dataThree methods were employed to generate outliers in each dataset,and both type I (i.e.“masked”data)and type II (i.e.“swamped”data)errors were measured.The type II error measures what percentage of true outlying points would be identiÿed as non-outlying.The type I error measures the percentage of points which were generated underthe null hypothesis that wer e not allocated to a clusterunderthe identiÿcation method.The outliers which were generated as a separate cluster were placed along the axis that was used to separate the clean clusters at the same distance the clean clusters were separated.E.g.cluster 1is distributed N (0;I ),cluster2was distr ibuted N (2D;I ),andthe cluster of outliers was distributed N (4D;I ).(Where D = 2p;:99=p ).The radial outliers were generated with the same center as their respective clean clusters but with a covariance of 5times the cluster’s covariance.We are interested in points that are truly outlying so that we can calculate the type II error of our method,but some points that are generated with a large covariance matrix may still be close to the cluster’s center.In dimension 4,38%of points generated with N (0;5I )will bewithin the 24;:99bound of a N (0;I )ing an acceptance-rejection algorithm,each outlying radial point that was generated was accepted if and only if it was outside the ellipse of clean data.The outliers were constructed to form an annulus around theclean data such that the average squared distance of an outlying point was 2 2p;:99away from the center of the clean data.By creating an annulus of outliers,we can correctly measure our type II error as those outlying points that get clustered.The di use outliers were generated using the location and shape of the entire dataset.Again,we are only interested in points that are truly outlying,so we use the same acceptance-rejection algorithm to reject points that fall among the clusters of good data.In dimension 4,n 42=300;300,82.7%of the disperse points would have fallen within 24;:99of one of the two clusters.The numberof outlier s simulated foreach combination of size and dimension was constructed relative to the smallest cluster.For dimension 4,n 42=200;400,if the numberof outlier s is 20%of the lar gercluster(80points),it would be di cult to distinguish between the good clusterof 200points and the bad clusterof 80points.So,the percentage of outliers of each pair of size and dimension is relative to the smaller of the two cluster s.Foreach dimension,size,and outliertype we simulated outlier s of size 20%of the smallest cluster.(In preliminary work di erent outlier percentages were tried and results were virtually identical.)Foreach combination of size,dimension,and type of outlier s,100sets of indepen-dent data were simulated,and the number of points the asymptotic F ,the adjusted F ,and the 2cuto s identiÿed as outlying was counted.5.2.1.Cluster outliersTable 2gives the results for both type I and type II errors for contaminated data.These simulations were done with two di erent cluster conÿgurations,but the total sample size of the clean data stayed constant across dimension (600total clean pointsJ.Hardin,D.M.Rocke/Computational Statistics&Data Analysis44(2004)625–638635 Table2Contaminated data(2clusters)Type I Error Type II ErrorClusterRadial Di use ClusterRadial Di use 1%F40.420.370.371%F40.17 1.730.32 P70.570.470.51P70.000.060.00 100.530.480.49100.000.000.00 1%Adj F40.600.540.521%Adj F40.12 1.430.10 P70.680.560.61P70.000.060.00 100.640.570.60100.000.000.00 1%Chisq418.0318.0217.591%Chisq40.000.120.00 P715.0214.7214.53P70.000.000.00 1014.3914.3114.20100.000.000.00 Each entry represents the percent of simulated data that was misclassiÿed according to a speciÿed cuto and percentage.Theÿrst column of tables reports the type I error for the procedure,and the second column reports the type II error.Cluster refers to data that was contaminated by generating clusters of multivariate normal data with a cluster of contamination of size20%of the smallest clean cluster.Radial refers to data that was contaminated by generating radial outliers of size20%of the smallest clean cluster.Di use refers to data that was contaminated by generating di use outliers of size20%of the smallest clean cluster.The analysis was done using the MCD estimates.Results were equivalent for cuto s at the5%and0.1%level.in dimension4and1000total clean points in dimensions7and10.)The theoretical F cuto is a little conservative,but it is an improvement over the 2cuto .Also,the adjusted F cuto o ers a slight improvement over the theoretical F.For type II error, there is virtually no clustering of the outlying points.5.2.2.Radial outliersLike the clusteroutlier s,the total sample size of the clean data stayed constant across dimension,and the outliers were always generated as20%of the smallest cluster size.We see again that the theoretical F is an improvement over the 2which is far too liberal at identifying outliers.Also,again the adjusted F cuto o ers a slight improvement over the theoretical F both in terms of type I and type II error.There is more type II error with the radial outliers,but the amount is negligible except for dimension4with an extreme cuto (0.1%or less.)5.2.3.Di use outliersThe results for di use outliers are similar to those for radial outliers.Once again, the theoretical F cuto gives an improved but conservative bound for the type I error while the adjusted F gives the best results for type I error and improved results over the theoretical F for type II error.The type II error is seen as a problem again only in dimension4with extreme cuto s(0.1%or less.)。