后方交会法在水平位移监测中的应用探讨
后方交会法在水平位移监测中的应用探讨
t n n i t r e t g p i tc o d n t sa d t o e i n e s c i n a g e r sd s wh c a e h i s i n e s c i o n o r i a e n h s n i t r e to n l so i e , o n ih m k s t e
后 方 交 会 法 在 水 平 位 移 监 测 中 的 应 用 探 讨
曹 凌 云
(中 国有 色金 属工 业长 沙勘 察设计 研 究 院 , 湖南 长 沙 4 0 1 1 0 1)
摘 要 : 根 据 后 方 交会 公 式 , 出 交 会 点 坐 标 变 化 量 与 交 会 角 或 交 会 边 变 化 量 之 间 的 线 性 关 系 导
r s uton ofh io a ipl c m e m me i t , sm p e, e e to nd e s o a al e i he e ol i orz nt ld s a e nti da e i l xp dii usa a y t n yz n t ~ or . The a plc ton ofr s c i n m e ho n ho ion a i p a e e y p ia i e e to t d i rz t ld s l c m nt mon t rng on t t biiy io i he s a lt o e a i on r i s i p ov st e wo k n fi inc n he r a — i e i e sa fe tv — fop r tng c t olpo nt m r e h r i g e fce y a d t e ltm ln s nd e f c i e— —
后方交会在施工测量中的应用
后方交会在施工测量中的应用摘要:测绘仪器经过长期的发展,其功能多样化、专业化充分显现,同时精度更加可靠。
测绘仪器的发展为工程测量提供了多种方法,尤其是全站仪的普遍运用使测量工作的开展更加便捷高效。
在施工放样过程中,由于后方交会的测量方法具有控制点布设灵活、施测方便快捷、控制点之间无需通视等优点,常被采用。
关键词:施工放样、后方交会、全站仪、精度一、引言玉溪矿业有限公司大红山铜矿位于新平县戛洒镇境内,其地理位置为东经101°39′,北纬24°06′,地表海拔高度为600-1850米,相对高差为1250米。
矿区属侵蚀剥蚀山地地形,地势险峻,河谷发育交错。
矿区地下工程错综复杂,井巷内通风条件、温湿度、空气能见度都相对地表有明显差异。
综合考虑客观限制条件以及安全因素,要求井下测量作业在满足精度的前提下,快速完成作业。
由于井巷工程顶板垮落、巷道喷浆支护、密闭墙施工、采空区、爆破作业等原因,使得布设在巷道顶板上的控制点掉落,造成控制点之间无法通视或者巷道内长距离没有控制点的状况。
当新建工程远离现有控制点且新建工程零星分布时,特别是采矿区域处于逐渐收缩的情况下时,为满足类似新建工程的施工放样测量,重新布设控制导线,进行测量平差,会增加生产成本以及安全风险。
如何根据实际情况选择恰当的测量方法进行工程放样,并完成后期测图工作,成为局限条件下应当思考的问题。
局限条件下,后方交会为高效开展井下测量作业提供了一种技术手段。
二、两点后方交会方法的比选根据后方交会过程中观测值的不同,可将后方交会方法分为测边后方交会、测角后方交会以及边角同测后方交会。
选择角度后方交会时,我们需要在已知点上观测夹角。
而根据实际情况出发,井下巷道内布设导线或临时控制点,较为可行的方法是在巷道侧帮及顶板上布设控制点。
这时,测角交会的方法没有现实可行性,不考虑。
如图1所示,某次测量作业中,在巷道侧帮布设三个临时控制点A (6993.327,2015.638,446.008)、B(6993.428,2017.308,445.987)、C (6986.975,2016.509,445.963),自由设站P点。
基坑变形监测水平位移测量的几种方法

基坑变形监测水平位移测量的几种方法作者:李月彬李彩云来源:《城市建设理论研究》2012年第18期摘要:随着城市经济建设的快速发展,城市用地越来越紧张,使得城市发展不得不向上或向下发展,基坑开挖的深度越来越深。
为了确保基坑支护的安全,不论是一、二、三级基坑,根据《建筑基坑工程监测技术规范》GB50497-2009的要求对基坑坡顶的水平位移都要求进行监测,现就当前基坑监测水平位移监测的几种方法进行探讨。
关键词:水平位移测量;视准线法;小角法;前方交会;后方交会;极坐标Abstract: With the rapid development of the city's economic construction, urban land is more and more tense, which makes the urban development had to go upward or downward, such as the deeper and deeper excavation of foundation pit. In order to ensure the safety of the excavation support system, no matter the primary, secondary, or third pit, according to the requirements of Building Foundation Pit Project Monitoring Technical Regulation GB50497-2009, the horizontal displacement of the pit top are required to be monitored. Hereby, this paper will expounds the several methods for the current horizontal displacement monitoring.Key words: horizontal displacement measurement; collimation line measurement; small-angle measurement; forward intersection; resection; polar coordinates中圖分类号:TV551.4文献标识码:A 文章编号:2095-2104(2012)视准线法视准线法,主要应用在场地比较开阔,基坑比较规整的长方形或正方形基坑。
后方交会法在基坑水平位移监测中的应用
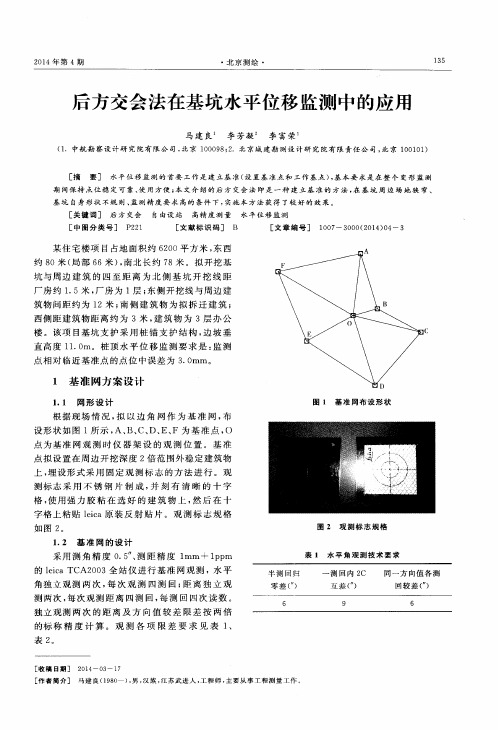
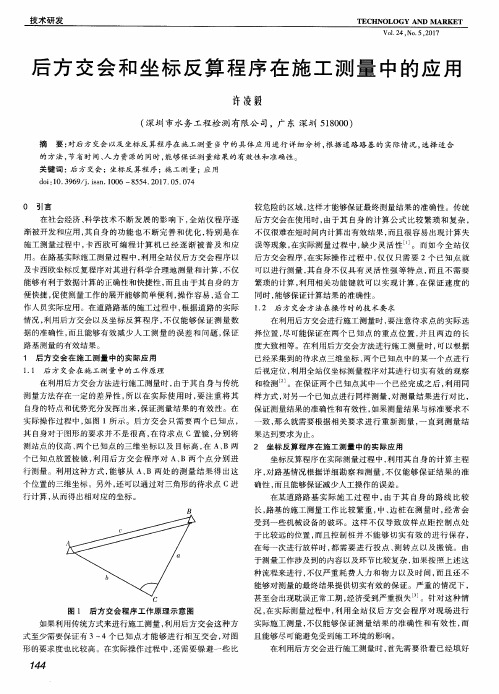
某住 宅楼 项 目占地 面积 约 6 2 0 0平方 米 , 东西
约 8 O米 ( 局部 6 6米 ) , 南 北长 约 7 8米 。 拟 开 挖 基
坑 与 周边 建 筑 的 四 至距 离 为 北 侧 基 坑 开 挖 线 距 厂房 约 1 . 5米 , 厂房 为 1 层; 东 侧开 挖线 与周 边建 筑 物 间距 约为 1 2米 ; 南 侧 建 筑 物 为拟 拆 迁 建 筑 ; 西侧距 建 筑物 距离 约 为 3米 , 建 筑物 为 3层 办 公
本项 目共 埋设 1 6 个 基坑 水平 位移 监 测点 , 取 其 中双站 极坐 标观 测较 差 最大 的监测 点 M2进 行 数据 分析 , 主 要 取 用 了监 测 点 M2从 基 坑 开 挖 一 5 m 至 一1 I m 过程 中的观测数据 , 统 计 结 果 见 表 4 , 由表 4可 知 监 测 点 M2的 测 量 较 差 均 在 3 am r 以内 , 满 足变 形点 的点 位精 度要 求 。
表 4 监 测 点 M2测 量 结 果 统计
参 考文 献
[ 1 ]高 绍 伟 , 姜晶 , 郭彤 . 全 站 仪 自由设 站 法 用 于基 坑 水 平
角独 立 观测 两 次 , 每 次 观 测 四测 回 ; 距 离 独 立 观 测两 次 , 每次 观测 距 离 四测 回, 每 测 回四 次读 数 。 独立 观测 两 次 的 距 离 及 方 向值 较 差 限 差 按 两 倍 的标 称 精 度 计 算 。观 测 各 项 限 差 要 求 见 表 1 、
表 2 。
[ 收 稿 日期 ] 2 0 1 4 —0 3 —1 7
[ 作 者简介] 马建良( 1 9 8 o ) , 男, 汉族 , 江苏武进人 , 工程师 1 4年 第 4期
测绘技术中的交会定位原理与应用

测绘技术中的交会定位原理与应用测绘是一门关于测量、绘制和分析地球表面特征的学科。
在测绘过程中,交会定位是一种基本的测量手段,它通过多个已知点和测量点之间的交会,来确定测量点的位置。
本文将介绍测绘技术中的交会定位原理与应用。
一、交会定位原理交会定位依赖于三角测量原理,即利用三角形的几何关系来计算未知点的坐标。
在交会定位中,需要至少三个已知点和它们与未知点的观测角度或观测距离。
根据测量数据,可以利用三角计量学的原理计算未知点的坐标。
交会定位方法有几种,其中最常用的是三角定位法和后方交会法。
1. 三角定位法三角定位法是一种基于三角形的几何关系来计算未知点坐标的方法。
在三角定位法中,需要至少三个已知点和它们与未知点的观测角度。
通过测量角度并利用正弦定理和余弦定理,在已知点与未知点之间建立三角形,从而计算未知点的坐标。
2. 后方交会法后方交会法是一种基于已知点和未知点之间的观测距离来计算未知点坐标的方法。
在后方交会法中,需要至少三个已知点和它们与未知点的观测距离。
通过测量距离和利用三角形的几何关系,在已知点与未知点之间建立三角形,从而计算未知点的坐标。
二、交会定位应用交会定位在测绘领域有着广泛的应用。
下面将介绍交会定位在工程测绘、地理信息系统(GIS)和导航系统中的应用。
1. 工程测绘在工程测绘中,交会定位被广泛应用于建筑工程和道路工程等。
通过利用交会定位法,可以确定建筑物或道路的地理位置和空间坐标。
这对于规划、设计和施工都有着重要的意义,可以保证工程施工的准确性和高效性。
2. 地理信息系统(GIS)GIS是一种将地理空间信息和属性信息进行整合、管理和分析的系统。
交会定位在GIS中起着至关重要的作用。
通过将已知点的坐标信息输入到GIS系统中,可以通过交会定位方法计算出未知点的坐标信息。
这对于地图编制、资源管理和空间分析等方面都具有重要意义。
3. 导航系统导航系统是一种用于定位和导航的技术系统。
交会定位在导航系统中被广泛应用于车载导航、航空导航和船舶导航等。
水平位移监测方法的相关研究
水平位移监测方法的相关研究摘要:各种类型全站仪特有的专用测量的应用一直是所有测量工作者的渴望,本文分析了全站仪边角后方交会法的原理,提出了在水平位移监测中全站仪边角交会的应用。
关键词:后方交会;水平位移;监测引言随着现代测量仪器的迅速发展,尤其是全站仪的大量普及,其测定的精度之高及简便快捷,已被测量工作者所认识。
而全站仪边角后方交会法由于其具有外业操作简便,受施工影响小等优点,有较好的水平位移监测精度,因此,该方法适合于城市建筑基坑、重大工程的水平位移监测。
1.边角后方交会法边角后方交会法类似于高速铁路所用CPⅢ控制网,基准点、工作基点、监测基点均为强制对中装制,采用固定设站按方向观测法对多个基准点(2个以上)和监测点进行边角观测,将观测得到的水平角、距离、天顶距按间接平差方法进行计算,从而得到设站点和待定点的坐标值。
1.1测站点、监测点坐标解算原理以A、B两个基准点、一个交会点P(工作基点)为例,在交会点P处观测SPA、SBP及夹角ρ,按以下过程解算工作基点、监测点坐标,如图1所示。
(1)根据已知控制点A、B,计算A、B两点之间的方位角αAB、αBA及边长SAB。
根据上述测站点的解算过程可知,影响后方交会精度的因子有:测角误差、测边误差、对中误差以及起算点误差等。
由于基准点采用强对中装制,因此对中误差可忽略不计。
计算分析表明,该方法受交会网形结构的影响。
基此,为方便讨论,利用测距精度0.6mm+1ppm,测角精度0.5″的数据,采用控制测量数据处理软件包CODAPS模拟计算对称交会,不同的交会角ρ对测站点精度的影响。
同时模拟计算非对称交会,当交会角ρ固定时,α、β的变化对测站点精度的影响。
(1)对称交会精度分析:网形如图2所示,经计算分析,交会角越小成果精度越低,反之越高。
当交会角ρ小于30°时会显著降低交会点的成果精度;当交会大于90°测站点精度优于1mm。
该误差统计如图3所示。
工程测量技术变形监测:后方交会法水平位移监测

等级
相邻基准点 的点位中误
差(mm)
平均边长 (m)
测角中 误差(″)
最弱边相对 中误差
一等
1.5
<300 <150
0.7 ≤1/250 000 1.0 ≤1/120 000
二等
3.0
<300 <150
1.0 ≤1/120 000 1.8 ≤1/70 000
三等
6.0
<350 <200
1.8 ≤1/70 000 2.5 ≤1/40 000
xp
xB
xBp
xB
a Kb 1 K2
y p yB yBp yB K xBp
a (xA xB ) ( yA yB ) cot
b ( yA yB ) (xA xB ) cot
c (xC xB ) ( yC yB ) cot
d ( yC yB ) (xC xB ) cot
四等 12.0
<400 2.5 ≤1/40 000
作业要求
按国家一等三角要求施测 按国家二等三角要求施测 按国家二等三角要求施测 按国家三等三角要求施测 按国家三等三角要求施测 按国家四等三角要求施测 按国家四等三角要求施测
测角后方交会
• 基准点:A、B与C
• 观测量:角度a与β • 求点P的平面坐标
后方交会法水平位移监测
武汉长江大桥
1957
南京长江大桥
1968
九江长江大桥 润扬长江大桥
芜湖长江大桥
安徽省芜湖市的芜湖长江大桥,全长10616米,是 目前中国最长的公铁两用桥。跨江主桥长2193米, 大桥主跨312米,是我国迄今为止公铁两用桥中跨 度最大的桥梁
铜陵长江大桥
安庆长江大桥
水平位移监测网的主要技术要求
后方交会技术在现代工程测量中的应用方法探讨

259管理及其他M anagement and other后方交会技术在现代工程测量中的应用方法探讨王志勇(江西有色地质勘查一队,江西 鹰潭 335000)摘 要:通过后方交会技术在建筑施工和矿山建设中的实践应用,大大的克服了一些因先天场地不足或者是仪器设备不齐全的情况下,同过该技术得到了很好的解决,同时也大大的增加了工作效率。
关键词:后方交会;全站仪;应用中图分类号:TB22 文献标识码:A 文章编号:11-5004(2020)18-0259-2收稿日期:2020-09作者简介:王志勇,男,生于1987年,汉族,江西吉安人,本科,研究方向:测绘工程。
近几年来我国经济的不断发展,科学技术的不断进步,测绘技术做为我们基础建设不可缺少的一部分,为工程建设提供了良好的技术支撑,为工程项目精度提供科学的保障,为工程建设打下了稳固的基础,同时测绘技术也得到了很好的应用与提升,促进了城镇现代化发展的进程和社会的进步。
本文主要介绍后方交会技术在现代工程建设项目中的一些应用、方法和注意事项[1]。
1 后方交会技术的主要优势(1)两两控制点之间不需相互通视,仪器随意假设空间较大。
后方交会测量只需全仪器假设点与控制点之间通视即可,全仪器可以不用假设在已知的控制点上,减少仪器对中时间,增加了便捷自由选择的空间。
(2)对于全仪器无法假设在控制点上或不方便假设仪器的控制点,可采用后方交会,例如:矿山中的竖井,受场地限制,在竖井转平硐时该方法能得到很好的应用。
大型基坑开挖的狭小场地,受场地及施工环境的限制,传统控制点易收到破坏,该方法能得到较好的应用。
2 后方交会技术在实际工程项目中的应用2.1 后方交会在施工测量中的应用。
在施工测量过程中,由于场地的限制采用全站仪对施工现场测量控制点的保存是一件相当头痛的事,常规的测站点要考虑到架设仪器的位置,点位的保存, 特别开挖过程中的公路、在建小区、地下室、绿化场地等等,控制点的点位保存即要考虑好仪器的架设还有点位的通视,哪就有点难了,常规方法是用支导线点引进施工现场,这些点位一般都施工现场较为开阔的地方,场地平整、开挖、机械设备的作业经常遭到破坏,重复引点对测量精度也会造成较大偏差[2]。
反射贴片和后方交会在基坑水平位移监测应用
CONSTRUCTION
第 5 卷 第 25 期 2015 年 9 月
反射贴片和后方交会在基坑水平位移监测应用
刘福春 1 姚加平 2 1、江苏星月测绘科技股份有限公司 江苏盐城 224000
2、江苏瑞都测绘有限公司 江苏盐城 224000
:摘 要 采用全站仪中的后方交会法,结合反射贴片。解决了因施工引起周边土体变形而导致工作基点不稳定或场地狭小无法长期保护工作基
3.2 水平位移监测点精度分析 如图(一)所示,仪器架设在 P 点上,通过后方交会法得出 P 点的坐 标,把图中测站点到 A1、A2 距离代入(4)得出测站点的反算误差 = 0.86 mm。极坐标测量的测站点为后方交会,所以不必考虑对中误差,只需要 考虑测角误差、测距误差、测点棱镜的对中误差、以及测站点的反算误差, 则监测点点位中误差为:
[1] 张冬晓.建筑基坑监测及预测预报系统研究:[学位论文].长沙:中南大学 2005.10~15 [2] 李锋.全站仪自由设站法的精度分析[J].现代测绘,2006(5):19~22 [3] 金建平.自由设站法在深基坑水平位移监测中的应用与分析[J].勘察科 学技术,2008(5):55-58. [4] 李全信.关于几种交会定点的精度估算公式[J].城市勘察.1994.(1)
此文章编码:2015S3150
(5)
式中 为全站仪的测角中误差, 为测距中误差, 为监测点
棱镜对中误差, 为测站点的反算误差。本次使用的全站仪为拓普康
MS05 则 =
。如果选择离开基准点最远的一个监测点来作为精
度估算,测距大概为 104.6 米,则 = 0.6 mm 。考虑棱镜对中误差
= 毫米,把以上内容带人(5)式得 =2.27 毫米。
后方交会法-基坑水平位移监测教程

三 全站仪后方交会法的操作
(1)开机、整平、对中 。 (2)按 MENU 进入菜单健,,按 F1 进入应用程序,再F3 进入“自由设站”程序 这里 F1 设置作业是为了当自由设站操作完成后,可以直接 进行测量,也便于数据存到指定作业里。 F2设置限差也就是充许计算出来的数据一个误,可以选择打 开或关闭 (3)按 F4 开始进行测站点 设置 ,这里主要是对名和仪 器高的设置
(4)设置目标点进入设置 第一种方法,就是仪器里已经把目标点坐标输入到了仪 器里面,只需要输入点名和棱镜高点确认完成设置。 第二种方法,就是现场输入坐标,需要F4翻页再按F1坐 标输入完成确认完成设置。 特别说明一点就是高程不能输0, 如果真遇到高程是0的 情况 ,输成 0.001 米,因为输入 0怕计算错误。
5、设置完成后就进入测量界面
对准目标点 按 F3 测存即可 ,然后按 F2 下一点进行目 标点设置,然后再测量,对两个及以上的目标点设置测量 好后在测量界面,按 F1 结果就可以显示测站点坐标 。
完了确认后就可以进行测量采集等工作啦。 完了确认 后就可以进行测量采集等工作啦。
四 什么是危险圆 ?
目 录
Contents
一 什么是后方交会法?
后方交汇法是:在待定点上 架设仪器,分别观测二个或者 以上(一般为3个以上)的已知 点的夹角,然后计算出待定点 的坐标,就是后方交汇法。特 点是:仪器架设在待确定点上。 后方交会法也叫自由设站法。
二 后方交会法原理
全站仪后方交会法观测,是一种以角度与距离同时测量的极 坐标法为基础,应用高精度全站仪在基坑附近一方便观测的 位置设一观测站,从观测站上观测若干个已知点(或一基准 线的两个基准点)以及变形监测点的方向和距离,按极坐标 法计算出两基点及各变形点在以仪器中心为坐标原点的坐标 系中的平面坐标,通过坐标换算(或是按最小二乘法进行平 差)计算出各变形观测点在以基准 点为坐标原点的坐标系中的平面坐 标,通过对各点的周期性观测,便 可得到各变形观测点的位移变化。
边角后方交会法在基坑水平位移监测中的应用及精度分析

Science &Technology Vision科技视界0引言基坑水平位移监测能及时了解基坑在开挖过程中的水平位移发展情况,为确保基坑开挖过程中的安全提供有效的预警。
城市复杂环境中开挖深基坑,对基坑水平位移的监测精度一般要求较高。
传统的基坑位移监测方法有视准线法、小角法、极坐标法、前方交会法、后方交会法等[1]。
不论哪种方法工作的前提都是工作基点稳定或者工作基点位移能精密测量出来。
在施工过程中,一般都要对施工现场进行围挡,施工场地狭小。
施工机械、车辆、临时堆积的材料等往往阻碍视线,基坑开挖过程中对周围土体的影响也会造成工作基点的移动。
传统单一的监测方法已不能很好适应目前基坑水平位移监测工作。
结合全站仪边角后方交会法和极坐标法,根据施工现场条件灵活、快速测定临时控制点坐标,再从临时控制点测定其它点位,能够有效解决以上问题。
1基于全站仪边角后方交会的基坑监测方法1.1全站仪边角后方交会法测量原理如图1所示,全站仪边角后方交会法的原理是:在待定点P 放置全站仪,测出待定点P 到已知控制点之间的距离以及方向角,根据方向角观测值和边长观测值建立方向角、边长误差方程式,根据间接平差理[2]计算待定点坐标。
图1A、B 为已知点,P 为待定点。
在P 点安置全站仪,瞄准A、B 方向,测出各自的方向值γ1、γ2,以及距离S 1、S 2,由已知条件可知,观测量n=4个,必要观测t=2个,多余观测r=2个,根据间接平差列出误差方程式:A=(1)上式中取ρ=180×60×60π≈206265,α0PA 、α0PB 、S 0PA 、S 0PB 为各观测边近似坐标方位角和近似边长,它们可由待定点的近似坐标以及已知点的坐标利用坐标反算公式求得,例如:α0PA =arctan(y A -y 0P x A -x 0P),S 0PA =(x A -x 0P )2+(y A -y 0P )2√上面的误差方程可以写成矩阵形式:V 4×1=A 4×2*X 2×1-L 4×1(2)其中X T =[δxp δyp ],L T =[S 1-S 01S 2-S 02γ1-γ01γ2-γ02],利用最小二乘平差求得:X=Q A TPL,Q =(A TPA )-1,其中P 为观测值权阵进一步可求得:x P =x 0P +δx ,y P =y 0P +δy(3)坐标改正数协因数阵为:Q XX =Q 11Q 12Q 21Q 22[]P 点点位中误差为:m P =±m 2x +m 2y √,m x =±m 0Q 11√,m y =±m 0Q 22√(4)其中,m 0为单位中误差,m 0=±V T PV n-t√1.2全站仪边角后方交会法精度分析(1)图形强度误差对全站仪边角后方交会的精度影响P 点坐标计算公式为:x P =x a +sin β1*S 1y P =y a +cos β1*S 1{(5)(5)式微分可得:dX P =sin β1dS 1+S 1cos β1dβ1dY P =cos β1dS 1-S 1sin β1dβ1{(6)把(6)式的dβ1利用余弦公式的微分置换整理可得:dX P =cos β2sin β()dS 1+cos β1sin β()dS 2dY P =sin β2sin β()dS 1+sin β1sin β()dS 2⎧⎩⏐⏐⏐⏐⎨⏐⏐⏐⏐(7)由误差传播定律可得P 点中误差为,M P =±M 2X +M 2Y √=±1sin βm 2s +m 2s 2√(8)全站仪的测距中误差,一般采用厂方给定的标准精度,m 2S =a 2+(bS )2(9)其中,a 为固定误差(单位mm),b 为比例误差(单位ppm,即10-6),S 为边长(单位km)将(9)带入(8)可得:M P =±2√sin βa 2+b 2(S 21+S 22)2√(10)依据文献[3]可知,对于一定的β角,当β1=β2,即P 点在位于AB 中垂线上或中垂线附近区域的精度要比其他区域高。
几种位移测量方法的讨论

几种水平位移监测方法的分析和比较摘要:本文对几种常用的水平位移监测方法进行了比较系统的分析和比较,包括视准线法、测小角法、测角交会法、测边交会法、极坐标法以及方向线偏移法。
列举出了这几种方法的原理、精度分析、优点、不足以及它们适用的场合等,对于在生产实践中进行水平位移观测时进行方法的选取具有一定的指导价值。
关键词:水平位移,视准线法,测小角法,前方交会法,测角交会,测边交会,极坐标法,方向线偏移法.1. 引言当需要观测某一特定方向(譬如垂直于基坑围护体系)的位移时,经常采用视准线法、测小角法等观测方法。
但当变形体附近难以找到合适的工作基点或需同时观测变形体两个方向位移时,则一般采用前方交会法。
水平位移观测观测实践中利用较多的前方交会法主要有两种:测角前方交会法和测边前方交会法。
另外还有极坐标法以及一些适合困难条件下使用的水平位移观测方法。
2. 水平位移观测方法分析和比较2.1 视准线法:点A、B是视准线的两个基准点(端点),1 d , 2 d , 3 d 为水平位移监测点。
观测时将经纬仪置于A点,将仪器照准B点,将水平制动装置制动。
竖直方向转动经纬仪望远镜,分别转至1 d , 2 d , 3 d 三个点附近,用小钢尺等工具分别量取水平位移监测点1 d , 2 d , 3 d 至A—B这条视准线的距离。
根据前后两次量取的距离,得出这段时间内水平位移量[1]。
精度分析:由视准线的设置过程可知,观测误差主要包括仪器测站点仪器对中误差、视准线照准误差、读数照准误差,其中,影响最大的无疑是读数照准误差。
可知,当视准线太长时,目标模糊,读数照准精度太差。
且后视点与测点距离相差太远,望远镜调焦误差较大,无疑对观测成果有较大影响。
另外此方法还受到大气折光等因素的影响。
优点:视准线观测方法因其原理简单、方法实用、实施简便、投资较少的特点, 在水平位移监测中得到了广泛应用,并且派生出了多种多样的观测方法,如分段视准线、终点设站视准线等。
后方交汇在房屋施工测量中应用的可行性探讨

后方交汇在房屋施工测量中应用的可行性探讨摘要:传统的测量放样手段内控法(铅直仪向上投测)相对于目前工程设计复杂性、施工难度不断提高及工期紧迫性等方面已显得明显滞后,本文依据测量学中后方交会的基本原理,探讨其在房屋施工测量放样中应用的可行性,为工程项目管理(安全管理、现场管理及成本管理)水平的持续改进与创新在测量放线环节上提供技术支持。
关键词:内控法,激光铅直仪,后方交会,危险圆。
后方交会用于房建工程施工测量放样在目前的相关规范中及教材中尚无明确论述,在房屋主体结构施工阶段,特别是高层房建施工测量中,伴随建筑结构设计的复杂性和多样性使得内控法逐渐不能满足现代施工的需要。
而测距仪、全站仪和大容量程序型计算器的广泛应用,测距、测角精度的不断提高,后方交汇观测成果的精度也不断提高;文章从后方交汇的主要形式:测角型、测边型和边角同测型,用评差概算原理探讨了采用不同类型仪器观测时,观测结果的理论精度(不考虑起始点误差);根据后方交汇的危险圆原理,提出了基于固定施工场地的优化交会图形设计和提高观测成果精度的设想,探讨其在现代房屋施工测量用的可行性。
一、后方交会1、测角后方交会三角形A、B、C是坐标已知的控制点A ( xA , yA) 、B ( xB ,yB ) 、C ( xC , yC),P点是任意楼层的待定点(即为后方交会点),观测时,置全站仪于P点,按照相关规范要求用全圆测回法测定α、β、γ角值,即可应用解析法公式算出待定点P的坐标P( xP , yP)2、测边后方交会观测时,置全站仪于P点,按照相关规范要求分别观测边s1,s2,即可应用解析法公式算出待定点P的坐标P( xP , yP)式中2-4中a,b为测距仪的固定误差和比例误差,γ为P点与两个已知点的夹角。
3、边角后方交会观测时,置全站仪于P点,按照《工程测量规范的要求》分别观测边SB 及角度γ。
即可应用解析法公式算出待定点P的坐标P( xP ,yp)式中,ms为测边中误差,mσ为测角中误差。
后方交会在施工测量中的应用与分析的开题报告
后方交会在施工测量中的应用与分析的开题报告一、选题背景和意义在进行土木工程施工前,需要对施工区域的地理和环境条件进行勘察和测量。
施工测量是土木工程施工的重要环节之一。
其中,后方交会是一种常用的测量方法,可以用于解决施工中的测量问题。
后方交会的基本原理是通过测量已知点间的水平距离和方向角,计算出未知点的坐标。
由于后方交会具有精度高、操作简单等特点,因此被广泛应用于土木工程中。
本次研究旨在探究后方交会在施工测量中的应用与分析,旨在对施工测量中后方交会方法的应用进行深入的研究,以期使施工测量更加准确、安全和高效。
二、研究内容和方法本次研究的主要内容包括:1. 后方交会法的基本原理和计算方法;2. 后方交会在水平角、垂直角度测量中的应用;3. 后方交会在高程测量中的应用;4. 后方交会在多边形封闭中的应用;5. 后方交会在控制测量中的应用;6. 后方交会在三角测量中的应用;7. 后方交会误差分析,包括误差来源、误差类型和误差控制方法。
本次研究的研究方法主要包括文献资料收集、实地测量和统计分析等方法。
通过对相关文献的收集和分析,了解后方交会技术的基础知识和应用情况。
在实地测量工作中,应用后方交会法进行测量,并根据实测数据进行误差分析。
三、预期目标和成果本次研究的预期目标和成果包括:1. 对后方交会方法的应用和分析进行深入研究,掌握后方交会方法的基本原理、计算方法和误差分析;2. 提出在施工测量中应用后方交会法的具体方法;3. 探究后方交会法在不同测量领域中的应用情况,为施工测量提供技术支持;4. 对本次实测数据进行统计分析,得出误差规律和误差控制方法,并对实测数据进行成果报告。
四、研究计划1. 第一阶段:文献资料收集和整理(时间:2周)收集和整理与后方交会方法相关的文献资料,深入了解后方交会方法的基本原理、计算方法和误差来源。
2. 第二阶段:实地测量和数据处理(时间:4周)在实地选定的测量点进行测量,并进行数据处理和分析,得出误差统计数据和可行的误差控制方法。
后方交会和坐标反算程序在施工测量中的应用
可 以进行测量 , 其 自身不 仅具有灵 活性强 等特点 , 而 且不需 要
繁 琐 的计 算 , 利用相关功 能键就 可以实现 计算 , 在 保 证 速 度 的 同时 , 能够 保 证 计 算 结 果 的准 确 性 。 1 . 2 后 方 交会 方 法在 操 作 时 的技 术要 求 在 利 用 后 方 交 会进 行施 工 测 量 时 , 要注 意 待 求 点 的实 际选 择位置 , 尽可能保证在两个 已知点 的重点 位置 , 并 且 两 边 的 长 度 大 致 相 等 。 在 利 用后 方 交 会 方 法 进 行 施 工 测 量 时 , 可 以 根 据 已经 采 集 到 的 待求 点 三 维坐 标 、 两 个 已知 点 中 的 某 一 个 点 进 行 后视定位 , 利 用 全 站 仪 坐 标 测 量程 序对 其 进 行 切 实 有 效 的 观察 和 检 测 。在 保 证 两 个 已 知 点其 中一 个 已经 完 成 之 后 , 利 用 同 样方式 , 对 另 一 个 已知 点 进行 同样 测 量 , 对测量结果进行 对 比, 保 证 测 量 结 果 的 准 确性 和有 效 性 , 如果 测 量 结 果 与 标 准 要 求 不
行计算 , 从 而 得 出相 对 应 的 坐 标 。
B
坐 标 反算 程序 在实 际测 量 过 程 中 , 利 用 其 自身 的 计 算 主 程
序, 对路基情况根据详细勘察 和测量 , 不 仅能够保 证结果 的准
确性 , 而 且 能 够 保 证 减 少人 工 操 作 的误 差 。 在某 道 路 路 基 实 际 施 工 过 程 中 , 由 于 其 自身 的路 线 比较
技术 研发
T E C H N 0 L 0 G Y A N D M AR _ K E T
交会法测定水平位移的精度分析

交会法测定水平位移的精度分析
岳建平;许捍卫
【期刊名称】《测绘工程》
【年(卷),期】2000(009)002
【摘要】对目前常用的几种典型交会测量方法进行了理论上的精度分析,并利用某大坝水平位移监测点的实测数据进行分析、验证,得出了一些有益的结论.
【总页数】4页(P64-67)
【作者】岳建平;许捍卫
【作者单位】河海大学;河海大学
【正文语种】中文
【中图分类】P207
【相关文献】
1.用距离差交会法测定建筑物的水平位移 [J], 陈丽华
2.空间前方交会法测定像控点的精度分析 [J], 程光亮;王宝山
3.拱坝水平位移前方交会观测点位精度分析 [J], 黄恒康;揭珍荣
4.边角后方交会法在基坑水平位移监测中的应用及精度分析 [J], 张少卫;李栋栋
5.短基线前方交会法测定水平位移及其精度分析 [J], 王国辉;马莉
因版权原因,仅展示原文概要,查看原文内容请购买。
桥梁工程中全站仪后方交会法的应用研究陈永璐张贵辉

桥梁工程中全站仪后方交会法的应用研究陈永璐张贵辉发布时间:2021-10-28T03:08:47.289Z 来源:《中国科技人才》2021年第20期作者:陈永璐张贵辉[导读] 在当前施工建设管理的基础上,实施全站仪后方交会法,能够有效的增进桥梁工程建设管理质量,发挥建设管理优势,提升建设管理水平。
中交路桥华南工程有限公司广东中山 528400摘要:在当前施工建设管理的基础上,实施全站仪后方交会法,能够有效的增进桥梁工程建设管理质量,发挥建设管理优势,提升建设管理水平。
尤其这种全站仪后方交会法本身能在指定的位置上对工程建设环节进行全面的监测分析,同时也能有效的衡量不同监控位置的实际距离和工作夹角度,最终确定使用的具体坐标位置方式,全面减少不同的外部施工因素对于整个桥梁工程施工产生的直接影响。
关键词:全站仪;自由设站;后方交会1 全站仪的基本概念及发展现状1.1 全站仪的基本概念在当前公路测量建设管理的过程中,尤其在部分山区公路建设管理的过程中,要想推进施工放样工作落实,施工作业人员往往通过多工种之间的交叉作业进行实现。
尤其在填挖使用的主要路段,随着填挖路段土方的施工建设速度不断加快,令整个地面环境的变动状态相对较大,另外在整个桥梁施工基础挖掘的过程中,若是基坑本身的环境较为复杂,基坑深度较大,加之车辆反复的震动压迫和周边设备的肆意堆放,往往会令整个施工场地范围内的施工控制点受到外部因素的影响而产生破坏。
若始终将施工作业控制点的位置设置在附近的山区位置,则能较好的保存施工控制点。
但是在这种状态环境之下,施工的控制点本身所假设的全站仪本身观察不到路基和基坑环境中所设定的精细点,不能以点对点的方式实施放样点位置的监测分析,而是需要结合当前施工控制点的实际环境特点,在周边的场地环境中设定一个临时点,以此用于检测和分析。
这个临时点本身的检测一般都会使用全站仪后方交会法进行观察。
这种方式的使用也是当前我国公路桥梁建设施工管理过程中的一项主要的检测方式,能够适应较为复杂的桥梁施工建设环境,同时也能全面减少测量人员的工作质量,让整个施工放样的环境变得更加的便捷多样,全面提升了当前的工作质量和工作效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第10卷第3期徐州建筑职业技术学院学报Vol.10 .32010年9月JOU RNA L OF XU ZHOU INST IT U T E OF A RCHIT ECT U RAL T ECHNO LOGYSep.2010后方交会法在水平位移监测中的应用探讨曹凌云(中国有色金属工业长沙勘察设计研究院,湖南长沙410011)摘 要:根据后方交会公式,导出交会点坐标变化量与交会角或交会边变化量之间的线性关系式,使水平位移量的解算变得直接、简单、快捷,在理论上便于分析.将此法应用于水平位移监测工作基点稳定性的检测工作,能够提高工作效率及监测成果的实时性及有效性.关键词:后方交会;工作基点;水平位移中图分类号:P 217文献标识码:A文章编号:1009 8992(2010)03 0011 03Application of Resection Method in Horizontal Displacement MonitoringCA O L ing y un(C hina Nonfer ro us M eta ls Industry Changsha Geo technicalInvestigatio n and Design Resear ch Institute,C hangsha,Hunan 410011,China )Abstract:Based on the resection form ula,derived is the linear relatio nship betw een the varia tions in intersecting point coo rdinates and tho se in intersection angles or sides,w hich makes the resolution of horizontal displacem ent imm ediate,simple,ex peditious and easy to analyze in the ory.T he applicatio n o f resection metho d in horizo ntal displacement m onitor ing o n the stability of o perating control po ints improves the w o rking efficiency and the real tim eliness and effectiv eness o f the m onitoring results.Key words:r esectio n metho d;o perating co ntro l point;ho rizontal displacement收稿日期:2010 06 21作者简介:曹凌云(1964-),男,湖南双峰人,教授级高级工程师,主要从事技术管理及变形监测与数据处理的研究.Email:ckcly@在城市重大工程施工监测中,水平位移监测工作基点稳定性的检测是一项重要内容.在多数情况下,由于现场条件限制,该项检测的开展有一定难度.因此,探讨简便、实用的方法检测工作基点的稳定性是十分必要的.后方交会法作为一种水平位移监测方法广泛应用于工程测量中,许多教材对其基本原理和应用方法均有阐述.它具有设站少、适合复杂多变的现场条件及速度快等特点,但在位移的解算上不够方便.而根据后方交会公式直接导出交会点的坐标变化量与交会角或交会边变化量之间的线性关系式,能够使位移量的解算变得简单、快捷,并便于分析.1 后方交会法坐标位移量的解算1.1 测角后方交会如图1所示,设P 为工作基点(后交点),交会角为 和 ,点1、2、3为监测基准点(参考点),并设点1、3到点2的距离分别为S 1和S 2,其夹角为 .则监测点P [1]:x 2+!x 2Py 2+k !x 2P,(1)12徐州建筑职业技术学院学报第10卷!x 2P =a-bk 1+k 2,(1a)k =a +cb +d,(1b)a =(x 1-x 2)+(y 1-y 2)co t b =(y 1-y 2)+(x 1-x 2)cot c =(x 3-x 2)+(y 3-y 2)cot d =(y 3-y 2)+(x 3-x 2)cot,(1c)图1 测角后方交会示意Fig.1 Sketch of angular resection取图1所示坐标系,则P 点坐标计算公式改为[2]:x P =!x 2P y P =k !x 2P,(2)a =y 1cotb =-y 1c =-x 3+y 3co td =y 3+x 3co t,(2a)其中:!x 2P 及k 的表达式同式(1a)及式(1b).由于变形属微小量,因而将式(2)及式(1a)、式(1b)、式(1c)进行微分并整理得:d x P =y 1(2y P -d )∀(b +d)(1+k 2)sin 2d +(y 3-kx 3)(2y P +b)∀(b +d)(1+k 2)sin 2 d ,(3)d y P =y 1(ky P -x P -kd )∀(b +d )(1+k 2)sin 2d +(y 3-kx 3)(ky P -x P +kb)∀(b +d)(1+k 2)sin 2 d ,(4)由图1不难看出:y 1=S 1,x 3=S 2sin ,y 3=S 2cos ,代入式(2a)及式(1b)有:a =S 1cotb =-S 1c =-S 2(co t cot -sin )d =S 2(cot +sin cot )及k =S 1cot +S 2(co t cot -sin)S 2(cot +sin cot )-S 1,代入式(3)、式(4)并顾及d x =!x i =x i -x 1d y =!y i =y i -y 1,则有:!x Pi =A ! i +A ! i!y Pi =B ! i +B ! i,(5)式中:A =S 12y p -S 2(cos +sin cot )∀S 2(cos +sin cot )-S 1(1+k 2)sin 2 ,A =S 22y p -S 1(cos -k sin )∀S 2(cos +sin cot )-S 1(1+k 2)sin 2 ,B =S 1(k y p -x P )-kS 2(cos +sin cot )∀S 2(cos +sin cot )-S 1(1+k 2)sin 2 ,B =S 2(ky p -x P )-kS 1(cos -k sin )∀S 2(cos +sin cot )-S 1(1+k 2)sin 2,上式中令∀=206.265,如果! ,! 以s 为单位,S 1,S 2,x P ,y P 以m 为单位,则!x P ,!y P 以mm 为单位.从式(5)中可以看出,监测点P 的坐标变化量即为交会角变化量的线性函数,因而在! ,! 为已知的情况下无需通过复杂的运算即可求出位移量,给实际应用带来了方便.将式(5)转化为中误差关系式,并令观测精度相同,有[3]:m d x =!2(A 2 +A 2)mm d y =!2(B 2 +B 2)m,式中:m 为一测回测角中误差.位移点点位中误差为:m d P =!m 2d x +m 2d y .1.2 测边后方交会如图2所示,设P 为工作基点(后交点),点A 、B 为监测基准点(参考点),并设工作基点P 到基准点A 、B 的距离分别为b 和a.为计算方便起见,建立图2所示的坐标系,A 为原点,则点P 的坐标计算公式为:x 2P =h 2=b 2-S 21y P =S 1,(6)图2 测边后交示意Fig.2 Sketch of side resection对式(6)进行微分得:第3期曹凌云:后方交会法在水平位移监测中的应用探讨13d x P=h d b-1hd S1d y p=d S1,(7)因为q2=b2-h2=b2-a2+(S-S1)2即 S1=-a2+b2+S22S,微分得:d S1=-aS d a+bSd b,代入式(7)得:d x P=aS1hSd a+bS2hSd bd yP =-aSd a+bSd b,(8)式中:S2=S-S1.对于固定图形,式(8)中的系数是不变的.令A x=aS1hS,B x=bS2hSA y=-aS ,B y=bS,则P点坐标位移公式简化为d x P=A x d a+B x d bd y P=A y d a+B y d b,(9)设首期由观测边长a0和b0算出P点的坐标x0和y0作为基准值,则由d a=a-a0,d b=b-b0,按式(9)可求得d x P和d y P,即为观测边长为a和b 的那一期成果的坐标位移量.P点坐标位移的中误差计算公式为[3]:m xP=A2x+B2x mm yP=A2y+B2y m,(10)式中:m为边长变化值的中误差,它是测边中误差的2倍.2 实际应用在实际工作中,对于测角后方交会,参考点可以是已知控制点,此时需反算距离S1、S2及夹角;也可以是明显的物点或其他特征点,此时只需测出距离S1、S2及夹角(不必具有高精度),而点P的坐标可以通过 、 求出,于是即可求出4个系数.由于位移量相对较小,因而4个系数可视作常数,这样每次作业完后即可方便地求得位移量.当然作为一种后方交会方法,为了提高检测的灵敏度,应当选择最佳图形,绝对避免∀危险圆#.对于测边后方交会,参考点只能是已知基准点,需精确测出距离a和b,并解算出S1、S2及h,于是求出4个系数.由于图形是固定的,位移量相对较小,4个系数是不变的,这样每次作业完后即可求得位移量.各观测周期间参考点P的水平位移大小及其方向可按下式计算[4]:S i=!X2i+!Y2iT i=arctan!Y i!X i,(11)其中:i为观测周期次数.根据式(11)算得的水平位移量和方向可作出相应的位移矢量图.在长沙市地铁二号线土建施工第三方监测项目中,将后方交会法用于基坑水平位移监测工作基点稳定性检测工作.在实际应用中,预先计算出系数表,以后每次仅需根据角度或边长的变化量即可迅速可靠地获得各工作基点的位移量,据以在现场确定各工作基点的稳定情况.3 结语后方交会法用于水平位移监测工作基点稳定性检测,具有设站少、外业工作简单、计算简便、速度快等特点,克服了在城市繁华地段施工因场地狭小、基准点不通视等给测量工作带来的烦恼,提高了工作效率及检测成果的实时性及有效性,具有较强的应用价值.参考文献:[1] 测量学编写组.测量学[M].北京:测绘出版社,1993.[2] 曹凌云.地铁工程第三方监测方法研究[D].长沙:中南大学,2006.[3] 李青岳.工程测量学[M].北京:测绘出版社,1984.[4] 李爱民.关于深基坑水平位移监测方案的探讨[J].测绘学院学报,2000,17(1):19 21.。