4.4 Auxiliary Functions
施耐德电气 S51 系列光电传感器 - 中文说明书

The S51 series offers the most cost-effective solution in m18 photoelectric sensors which is today improvedthanks to the increase of the operating distances. The range includes the tubular metal housing as well as a brand news flat plastic housing which make installation. The tubular plastic and metal models are both available with either axial or radial optics; in both cases the optic head and lenses do not protrude beyond the external 18 mm diameter of the sensor housing. The diffuse proximity model presents a 10 cm fixed operating distance with wide emission spectrum and the anothermodel with 1 - 40 cm trimmer-adjustable operating distance. standardretroreflective models have an operating distance up to 4 m whilst the polarised retroreflective models used for reliable detection of reflective objects are fitted with sensitivity adjustment and have a 3.5 m operating distance. the emitter and receiver models, used for longer operating distances, reach 18 meters.The sensors of the S51 series, with cable or m12 connector and PnP or nPn output, provide a 3 wireconnection configuration in compliance with the en60947-5-2 standard.• flat plastic or cylindrical metal housing • versions with axial or radial optics • cable or m12 connection with nPn or PnP output• standard 3 wire connection configuration• selectable dark or light outputPHOTOeLeCTRICS e N S O R SoutPut status Led; Power on Led on g00 model Adjustment trimmer (b01, c01 models) m12 connector cable connectionPLASTIC HOUSINGMeTAL HOUSINGINDICATORS AND SeTTINGSG00 MODELA00/B01/C01/C10/C20/F00 MODELSCONNeCTIONSACCeSSORIeSrefer also to Reflector, Connectors and Fixing brackets of the GeneralCatalogue.AAAC BDBBradIaL oPtIcstrimmer for sensitivity adjustment. rotate in aclockwise direction to increase the operating distance.DDLong diffuse proximity operating dist.: 1 ... 40 cm (radial version 30 cm) Short diffuse proximity operating dist.:0 ... 10 cm (radial version 8 cm)Narrow beam proximity operating dist.: 0.2…10 cmRetroreflex operating distance:0.1…4 m (radial version 3 m) on r5Polarised retroreflx operating distance: 0.1…3 m (radial version 2.5 m) on r5Through beam operating distance: 0…20 m (radial version 18 m)Power supply: 10 ... 30 vdc 1Ripple:≤2 vpp Consumption: ≤35 maLight emission 2 :infrared Led 880 nm red Led 650 nm (b01 mod.)Setting: sensitivity trimmer (b01, c01 mod.)3Indicators: yellow outPut Led (excl. g00 mod.)green Power Led (g00 mod.)Output type: nPn vers. or PnP vers.Output current:≤100 ma Saturation voltage: ≤2 v Response time: 1 ms 4 ms (f00 mod.)Switching frequency: ≤500 hz ≤120 hz (f00 mod.)Operating mode:dark/light selectable 4Auxiliary functions:test + and test - (g00 mod.)5Connection: 2 m Ø 4 mm cable 6m12 4-pole connector 7electrical protection:class 2Mechanical protection: IP67Protection devices:a, b 8Housing material: Pbt (s51-P vers.)nickel-plated brass (s51-m vers.)Lens material: PmmaWeight:25 g max. (s51-Pa/Pr-5 vers.)75 g max. (s51-Pa-/Pr-2 vers.) 60 g max. (s51-ma/mr-5 vers.) 100 g max. (s51-ma/mr-2 vers.)Operating temperature: -25 ... +55°c Storage temperature: -25 ... +70°c Reference standard: en 60947-5-2, uL 508optic versions; the maximum operating distance of the radial optic versions decreases as indicated in the tables given belowgrey 18%white 90%grey 18%white 90%grey 18%white 90%r2r5r2r5TeCHNICAL NOTeS1Limit values2average life of 100.000 h with ta = +25 °c 3270° single-turn trimmer 4with L/d input not connected the proximity models function in the light mode and the retrore-flex and through beam models in the dark mode; the light mode can be selected connecting the L/d input to +vdc, the dark mode connecting it to 0vdc 5emitter off with test+ connected to +vdc and test- to 0 vdc 6Pvc, 4 x 0.14 mm27m12 connector compatible with quick connection systems 8a - reverse polarity protectionb - overload and short-circuit protectionrecommended operating distance maximum operating distance*only on axial optic modelsII3dg*the company endeavours to continuously improve and renew its products; for this reason the technical data and contents of this catalogue may undergo variations without prior notice. for correct installation and use, the company can guarantee only the data indicated in the instruction manual supplied with the。
电气系统可编程序控制器毕业论文中英文资料外文翻译文献
电气系统可编程序控制器中英文资料外文翻译文献英文原文Programmable controller designed for electro-pneumatic systems This project deals with the study of electro-pneumatic systems and theprogrammable controller that provides an effective and easy way to control thesequence of the pneumatic actuators movement and the states of pneumatic system.The project of a specific controller for pneumatic applications join the studyof automation design and the control processing of pneumatic systems with theelectronic design based on microcontrollers to implement the resources of thecontroller.1.IntroductionThe automation systems that use electro-pneumatic technology are formed mainlyby three kinds of elements: actuators or motors, sensors or buttons and controlelements like valves. Nowadays, most of the control elements used to execute thelogic of the system were substituted by the Programmable LogicController(PLC).Sensors and switches are plugged as inputs and the direct controlvalves for the actuators are plugged as outputs. An internal program executes allthe logic necessary to the sequence of the movements, simulates other componentslike counter, timer and control the status of the system.With the use of the PLC the project wins agility, because it is possible tocreate and simulate the system as many times as needed. Therefore, time can besaved, risk of mistakes reduced and complexity can be increased using the sameelements.A conventional PLC, that is possible to find on the market from many companies,offers many resources to control not only pneumatic systems, but all kinds of systemthat uses electrical components. The PLC can be very versatile and robust to beapplied in many kinds of application in the industry or even security system andautomation of buildings.Because of those characteristics, in some applications the PLC offers to much resources that are not even used to control the system, electro-pneumatic system is one of this kind of application. The use of PLC, especially for small size systems, can be very expensive for the automation project.An alternative in this case is to create a specific controller that can offer the exactly size and resources that the project needs[3,4].This can be made using microcontrollers as the base of this controller.The controller, based on microcontroller, can be very specific and adapted to only one kind of machine or it can work as a generic controller that can be programmed as a usual PLC and work with logic that can be changed. All these characteristics depend on what is needed and how much experience the designer has with developing an electronic circuit and firmware for microcontroller. But the main advantage of design the controller with the microcontroller is that the designer has the total knowledge of his controller, which makes it possible to control the size of the controller, change the complexity and the application of it. It means that the project gets more independence from other companies, but at the same time the responsibility of the control of the system stays at the designer hands2.Electro-pneumatic systemOn automation system one can find three basic components mentioned before ,plus a logic circuit that controls the system. An adequate technique is needed to project the logic circuit and integrate all the necessary components to execute the sequence of movements properly.For a simple direct sequence of movement an intuitive method can be used[1,5],but for indirect or more complex sequences the intuition can generate a very complicated circuit and signal mistakes. It is necessary to use another method that can save time of the project, make a clean circuit, can eliminate occasional signal overlapping and redundant circuits.The presented method is called step-by-step or algorithmic [1,5], it is valid for pneumatic and electro-pneumatic systems and it was used as a base in this work. The method consists of designing the systems based on standard circuits made for each change on the state of the actuators, these changes are called steps.Fig.1.Standard circuit for the pneumatic system.Fig.2.Standard circuit for the electro-pneumatic system.The first part is to design those kinds of standard circuits for each step, the next task is to link the standard circuits and the last part to connect the control element that receive signals from sensors, switches and the previous movement and give the air or electricity to the supply lines of each step. In Figs.1 and 2 the standard circuits are drawn for pneumatic and electro-pneumatic system [8].It is possible to see the relations with the previous and the next steps.3. The method applied inside the controllerThe result of the method presented before is a sequence of movements of the actuator that is well defined by steps. It means that each change on the position of the actuators is a new state of the system and the transition between statesis called step.The standard circuit described before helps the designer to define the states of the systems and to define the condition to each change between the states. In the end of the design, the system is defined by a sequence that never chances and states that have the inputs and the outputs well defined. The inputs are the condition for the transition and the outputs are the result of the transition.All the configuration of those steps stays inside of the microcontroller and is executed the same way it was designed. The sequences of strings are programmed inside the controller with 5 bytes; each string has the configuration of one step of the process. There are two bytes for the inputs, one byte for the outputs and two more for the other configurations and auxiliary functions of the step. After programming, this sequence of strings is saved inside of a non-volatile memory of the microcontroller, so they can be read and executed.The controller task is not to work in the same way as a conventional PLC, but the purpose of it is to be an example of a versatile controller that is design for an specific area. A conventional PLC process the control of the system using a cycle where it makes an image of the inputs, execute all the conditions defined by the configuration programmed inside, and then update the state of the outputs. This controller works in a different way, where it read the configuration of the step, wait the condition of inputs to be satisfied, then update the state or the outputs and after that jump to the next step and start the process again.It can generate some limitations, as the fact that this controller cannot execute, inside the program, movements that must be repeated for some time, but this problem can be solved with some external logic components. Another limitation is that the controller cannot be applied on systems that have no sequence. These limitations are a characteristic of the system that must be analyzed for each application.4. Characteristics of the controllerThe controller is based on the MICROCHIP microcontroller PIC16F877 [6,7] with 40 pins, and it has all the resources needed for this project. It ha enough pins for all the components, serial communication implemented in circuit, EEPROM memory to save all the configuration of the system and the sequence of steps. For the execution of the main program, it offers complete resources as timers and interruptions.The list of resources of the controller was created to explore all the capacity of the microcontroller to make it as complete as possible. During the step, the program chooses how to use the resources reading the configuration string of the step. This string has two bytes for digital inputs, one used as a mask and the other one used as a value expected. One byte is used to configure the outputs value. One bytes more is used for the internal timer, the analog input or time-out. The EEPROM memory inside is 256 bytes length that is enough to save the string of the steps, with this characteristic it is possible to save between 48 steps.The controller has also a display and some buttons that are used with an interactive menu to program the sequence of steps and other configurations.4.1.Interaction componentsFor the real application the controller must have some elements to interact with the final user and to offer a complete monitoring of the system resources that are available to the designer while creating the logic control of the pneumatic system:.Interactive mode of work; function available on the main program for didactic purposes, the user gives the signal to execute the step..LCD display, which shows the status of the system, values of inputs, outputs, timer and statistics of the sequence execution..Beep to give important alerts, stop, start and emergency..Leds to show power on and others to show the state of inputs and outputs.4.2. SecurityTo make the final application works property, a correct configuration to execute the steps in the right way is needed, but more then that it must offer solutions in case of bad functioning or problems in the execution of the sequence. The controller offers the possibility to configure two internal virtual circuits that work in parallel to the principal. These two circuits can be used as emergency or reset buttons and can return the system to a certain state at any time[2]. There are two inputs that work with interruption to get an immediate access to these functions. It is possible to configure the position, the buttons and the value of time-out of the system.er interfaceThe sequence of strings can be programmed using the interface elements of the controller. A computer interface can also be used to generate the user program easily. With a good documentation the final user can use the interface to configure the strings of bytes that define the steps of the sequence. But it is possible to create a program with visual resources that works as a translator to the user,it changes his work to the values that the controller understands.To implement the communication between the computer interface and the controller a simple protocol with check sum and number of bytes is the minimum requirements to guarantee the integrity of the data.4.4. FirmwareThe main loop works by reading the strings of the steps from the EEPROM memory that has all the information about the steps.In each step, the status of the system is saved on the memory and it is shown on the display too. Depending of the user configuration, it can use the interruption to work with the emergency circuit or time-out to keep the system safety.A block diagram of micro controller main program is presented.5.Example of electro-pneumatic systemThe system is not a representation of a specific machine, but it is made with some common movements and components found in a real one. The system is composed of four actuators. The actuators A,B and C are double acting and D-single acting. Actuator A advances and stays in specified position till the end of the cycle, it could work fixing an object to the next action for example(Fig.3), it is the first step. When A reaches the end position, actuator C starts his work together with B, making as many cycles as possible during the advancing of B. It depends on how fast actuator B is advancing; the speed is regulated by a flowing control valve. It was the second step. B and C are examples of actuators working together, while B pushes an object slowly, C repeats. its work for some time.Fig.3.Time diagram of A,B,C and D actuators.When B reaches the final position, C stops immediately its cycle and comes back to the initial position. The actuator D is a single acting one with spring return and works together with the back of C, it is the third step. D works making very fast forward and backward movement, just one time. Its backward movement is the fourth step. D could be a tool to make a hole on the object.When D reaches the initial position, A and B return too, it is the fifth step.Fig.4 shows the first part of the designing process where all the movements of each step should be defined[2]. (A+)means that the actuator A moves to the advanced position and (A . )to the initial position. The movements that happen at the same time are joined together in the same step. The system has five steps.Fig.4.Step sequence of A,B,C and D actuators.These two representations of the system(Figs.3 and 4) together are enough to describe correctly all the sequence. With them is possible to design the whole control circuit with the necessary logic components. But till this time, it is not a complete system, because it is missing some auxiliary elements that are not included in this draws because they work in parallel with the main sequence.These auxiliary elements give more function to the circuit and are very important to the final application; the most important of them is the parallel circuit linked with all the others steps. That circuit should be able to stop the sequence at any time and change the state of the actuators to a specific position. This kind of circuit can be used as a reset or emergency buttons.The next Figs.5 and 6 show the result of using the method without the controller. These pictures are the electric diagram of the control circuit of the example, including sensors, buttons and the coils of the electrical valves.Fig.5.Electric diagram of the example.Fig.6.Electric diagram of the example.The auxiliary elements are included, like the automatic/manual switcher that permit a continuous work and the two start buttons that make the operator of a machine use their two hands to start the process, reducing the risk of accidents.6. Changing the example to a user programIn the previous chapter, the electro-pneumatic circuits were presented, used to begin the study of the requires to control a system that work with steps andmust offer all the functional elements to be used in a real application. But, as explained above, using a PLC or this specific controller, the control becomes easier and the complexity can be increase also.It shows a resume of the elements that are necessary to control the presented example.With the time diagram, the step sequence and the elements of the system described in Figs.3 and 4 it is possible to create the configuration of the steps that can be sent to the controller.While using a conventional PLC, the user should pay attention to the logic of the circuit when drawing the electric diagram on the interface (Figs.5and 6), using the programmable controller, describe in this work, the user must know only the concept of the method and program only the configuration of each step.It means that, with a conventional PLC, the user must draw the relation between the lines and the draw makes it hard to differentiate the steps of the sequence. Normally, one needs to execute a simulation on the interface to find mistakes on the logic.The new programming allows that the configuration of the steps be separated, like described by the method. The sequence is defined by itself and the steps are described only by the inputs and outputs for each step.The structure of the configuration follows the order:1-byte: features of the step;2-byte: for the inputs;3-byte: value expected on the inputs;4-byte: value for the outputs;5-byte: value for the extra function.Fig.7.Actuators A and B, and sensors.Fig.8.Actuators C and D, and sensors.Table 5 shows how the user program is saved inside the controller, this is the program that describes the control of the example shown before.The sequence can be defined by 25 bytes. These bytes can be divided in five strings with 5 bytes each that define each step of the sequence (Figs.7 and 8).7. ConclusionThe controller developed for this work shows that it is possible to create a very useful programmable controller based on microcontroller. External memories or external timers were not used in case to explore the resources that the microcontroller offers inside. Outside the microcontroller, there are only components to implement the outputs, inputs, analog input, display for the interface and the serial communication.Using only the internal memory, it is possible to control a pneumatic system that has a sequence with 48 steps if all the resources for all steps are used, but it is possible to reach sixty steps in the case of a simpler system.The programming of the controller does not use PLC languages, but a configuration that is simple and intuitive. With electro-pneumatic system, the programming follows the same technique that was used before to design the system, but here the designer works directly with the states or steps of the system.With a very simple machine language the designer can define all the configuration of the step using four or five bytes. It depends only on his experience to use all the resources of the controller.The controller task is not to work in the same way as a commercial PLC but the purpose of it is to be an example of a versatile controller that is designed for a specific area. Because of that, it is not possible to say which one works better; the system made with microcontroller is an alternative that works in a simple way.References[1]E.Nelli Silva,Fluid-mechanics systems Manual, Escola PolitecnicaUSP,2002(in Portuguese).[2]J.Swider,Control and Automation of Technological Process and Mechatronic systems,Silesian University Publishing Company,Gli-wice,2002(redaction in Polish).[3]J.Swider, G.Wszolek, W.Carvalho. Example of the system prepared to be controlled by the controller based on microcontroller,in:12 International Scientific Conference—Achievements in Mechanical and MaterialsEngineering,Gliwice-Zakopane,Poland,2003,pp.965-970.[4]J.Swider,G.Wszolek,W.Carvalho, Controller based on microcontroller designed to execute the logic control of pneumatic systems, in:12International Scientific Conference— Achievements in Mechanical and Materials Engineering,Gliwice-Zakopane,Poland,2003,pp. 959–964.[5]J.Swider,G.Wszoek, The methodical collection of laboratory and project tasks of technological process control in Pneumatic and Electro-pneumatic Systems with Logical PLC Control, Silesian University Publishing Company,Gliwice,2003.[6]PIC 16f87xDatasheet.MICROCHIP,2001.[7]Application notes AN587 and AN546.MICROCHIP,1997.[8]Fundamental of electro-pneumatic—FESTODidactic,2000.中文翻译应用于电气系统的可编程序控制器摘要此项目主要是研究电气系统以及简单有效的控制气流发动机的程序和气流系统的状态。
微积分常用英文词汇 分章

英汉微积分词汇English-Chinese Calculus Vocabulary第一章函数与极限Chapter 1 Function and Limit高等数学higher mathematics集合set元素element子集subset空集empty set并集union交集intersection差集difference of set基本集basic set补集complement set直积direct product笛卡儿积Cartesian product象限quadrant原点origin坐标coordinate轴axisx 轴x-axis整数integer有理数rational number实数real number开区间open interval闭区间closed interval半开区间half open interval有限区间finite interval区间的长度length of an interval无限区间infinite interval领域neighborhood领域的中心center of a neighborhood领域的半径radius of a neighborhood左领域left neighborhood右领域right neighborhood映射mappingX到Y的映射mapping of X onto Y满射surjection单射injection一一映射one-to-one mapping双射bijection算子operator变化transformation函数function逆映射inverse mapping复合映射composite mapping自变量independent variable因变量dependent variable定义域domain函数值value of function函数关系function relation值域range自然定义域natural domain单值函数single valued function多值函数multiple valued function单值分支one-valued branch函数图形graph of a function绝对值absolute value绝对值函数absolute value function符号函数sigh function整数部分integral part阶梯曲线step curve当且仅当if and only if (iff)分段函数piecewise function上界upper bound下界lower bound有界boundedness最小上界least upper bound无界unbounded函数的单调性monotonicity of a function 单调增加的increasing单调减少的decreasing严格递减strictly decreasing严格递增strictly increasing单调函数monotone function函数的奇偶性parity (odevity) of a function 对称symmetry偶函数even function奇函数odd function函数的周期性periodicity of a function周期period周期函数periodic function反函数inverse function直接函数direct function函数的复合composition of function复合函数composite function中间变量intermediate variable函数的运算operation of function基本初等函数basic elementary function初等函数elementary function线性函数linear function常数函数constant function多项式polynomial分段定义函数piecewise defined function阶梯函数step function幂函数power function指数函数exponential function指数exponent自然指数函数natural exponential function对数logarithm对数函数logarithmic function自然对数函数natural logarithm function三角函数trigonometric function正弦函数sine function余弦函数cosine function正切函数tangent function半角公式half-angle formulas反三角函数inverse trigonometric function常数函数constant function双曲线hyperbola双曲函数hyperbolic function双曲正弦hyperbolic sine双曲余弦hyperbolic cosine双曲正切hyperbolic tangent反双曲正弦inverse hyperbolic sine反双曲余弦inverse hyperbolic cosine反双曲正切inverse hyperbolic tangent最优化问题optimization problems不等式inequality极限limit数列sequence of number复利compound interest收敛convergence收敛的convergent收敛于a converge to a发散divergence发散的divergent极限的唯一性uniqueness of limits收敛数列的有界性boundedness of a convergent sequence子列 subsequence函数的极限 limits of functions函数当x 趋于0x 时的极限 limit of functions as x approaches 0x单侧极限 one-sided limit左极限 left limit右极限 right limit单侧极限 one-sided limits渐近线 asymptote水平渐近线 horizontal asymptote分式 fractions商定律 quotient rule无穷小 infinitesimal无穷大 infinity铅直渐近线 vertical asymptote夹逼准则 squeeze rule (Sandwich theorem)单调数列 monotonic sequence高阶无穷小 infinitesimal of higher order低阶无穷小 infinitesimal of lower order同阶无穷小 infinitesimal of the same order等阶无穷小 equivalent infinitesimal多项式的次数 degree of a polynomial三次函数 cubic function函数的连续性 continuity of a function增量 increment函数在0x 连续 the function is continuous at 0x左连续 left continuous / continuous from the left右连续 right continuous / continuous from the right连续性 continuity不连续性 discontinuity连续函数 continuous function函数在区间上连续 function is continuous on an interval不连续点 discontinuity point第一类间断点 discontinuity point of the first kind第二类间断点 discontinuity point of the second kind初等函数的连续性 continuity of the elementary functions定义区间 defined interval最大值 global maximum value (absolute maximum)最小值 global minimum value (absolute minimum)零点定理 the zero point theorem介值定理 intermediate value theorem第二章 导数与微分Chapter 2 Derivative and Differential 速度velocity速率speed平均速度average velocity瞬时速度instantaneous velocity匀速运动uniform motion平均速度average velocity瞬时速度instantaneous velocity圆的切线tangent line of a circle割线secant line切线tangent line位置函数position function导数derivative求导法differentiation可导的derivable可导函数differentiable function光滑曲线smooth curve变化率rate of change函数的变化率问题problem of the change rate of a function导函数derived function导数定义域domain of derivative左导数left-hand derivative右导数right-hand derivative单侧导数one-sided derivatives在闭区间[a, b]上可导is derivable on the closed interval [a, b] 指数函数的导数derivative of exponential function幂函数的导数derivative of power function切线的斜率slope of the tangent line截距interceptsx 截距x-intercept直线的斜截式slope-intercept equation of a line点斜式point-slope form切线方程tangent equation焦点focus角速度angular velocity成本函数cost function边际成本marginal cost逐项求导法differentiation term by term积之导数derivative of a product商之导数derivative of a quotient链式法则chain rule隐函数implicit function显函数explicit function隐函数求导法implicit differentiation加速度acceleration二阶导数second derivative三阶导数third derivative高阶导数nth derivative / higher derivative莱布尼茨公式Leibniz formula对数求导法log- derivative参数parameter参数方程parametric equation相关变化率correlative change rata微分differential微分学differential可微的differentiable函数的微分differential of function自变量的微分differential of independent variable微商differential quotient逼近法approximation用微分逼近approximation by differentials间接测量误差indirect measurement error绝对误差absolute error相对误差relative error第三章微分中值定理与导数的应用Chapter 3 MeanValue Theorems of Differentials and the Application ofDerivatives均值定理mean value theorem罗尔定理Roll’s theorem费马引理Fermat’s lemma拉格朗日中值定理Lagrange’s mean value theorem驻点stationary point稳定点stable point临界点critical point辅助函数auxiliary function拉格朗日中值公式Lagrange’s mean value formula柯西中值定理Cauchy’s mean value theorem洛必达法则L’Hospital’s Rule不定式indeterminate form“0”型不定式indeterminate form of type “”泰勒中值定理Taylor’s mean value theorem 泰勒公式Taylor formula系数coefficient余项remainder term线性近似linear approximation拉格朗日余项Lagrange remainder term麦克劳林公式Maclaurin’s formula佩亚诺余项Peano remainder term阶乘factorial凹凸性concavity上凹(或下凸)concave upward (concave up)下凹(或向上凸的)concave downward (concave down) 拐点inflection point极值extreme value函数的极值extremum of function极大与极小值maximum and minimum values极大值local (relative) maximum最大值global (absolute) maximum极小值local (relative) minimum最小值global (absolute) minimum目标函数objective function收入函数revenue function斜渐进线slant asymptote曲率curvature弧微分arc differential平均曲率average curvature曲率园circle of curvature曲率中心center of curvature曲率半径radius of curvature渐屈线evolute渐伸线involute根的隔离isolation of root隔离区间isolation interval切线法tangent line method第四章不定积分Chapter 4 Indefinite Integrals 原函数primitive function / antiderivative积分integration积分学integral积分号sign of integration被积函数integrand积分变量integral variable积分常数constant of integration积分曲线integral curve积分表table of integrals换元积分法integration by substitution有理代换法rationalizing substitution三角代换法trigonometric substitutions分部积分法integration by parts分部积分公式formula of integration by parts有理函数rational function真分式proper fraction假分式improper fraction部分分式partial fractions三角积分trigonometric integrals第五章定积分Chapter 5 Definite Integrals曲线下方之面积area under a curve曲边梯形trapezoid with曲边curve edge窄矩形narrow rectangle曲边梯形的面积area of trapezoid with curved edge积分下限lower limit of integral积分上限upper limit of integral积分区间integral interval分割partition黎曼和Riemannian sum积分和integral sum可积的integrableSimpson 法则逼近法approximation by Simpson’s rule梯形法则逼近法approximation by trapezoidal rule矩形法rectangle method曲线之间的面积area between curves积分中值定理mean value theorem of integrals函数在区间上的平均值average value of a function on an interval 牛顿-莱布尼茨公式Newton-Leibniz formula微积分基本公式fundamental formula of calculus微积分基本定理fundamental theorem of calculus变量代换change of variable换元公式formula for integration by substitution递推公式recurrence formula反常积分improper integral反常积分发散the improper integral is divergent反常积分收敛the improper integral is convergent无穷限的反常积分improper integral on an infinite interval无界函数的反常积分improper integral of unbounded functions瑕点flaw绝对收敛absolutely convergent第六章定积分的应用Chapter 6 Applications of the Definite Integrals 元素法the element method面积元素element of area平面plane平面图形的面积area of a plane figure直角坐标(又称“笛卡儿坐标”)Cartesian coordinates / rectangular coordinates x 坐标x-coordinate坐标轴coordinate axes极坐标polar coordinates极轴polar axis极点pole圆circle扇形sector抛物线parabola椭圆ellipse椭圆的轴axes of ellipse蚌线conchoid外摆线epicycloid双纽线lemniscate蚶线limacon旋转体solid of revolution, solid of rotation旋转体的面积volume of a solid of rotation旋转椭球体ellipsoid of revolution, ellipsoid of rotation曲线的弧长arc length of a curve可求长的rectifiable光滑smooth功work水压力water pressure引力gravitation变力variable force第七章空间解析几何与向量代数Chapter 7 Space Analytic Geometry and Vector Algebra纯量(标量)scalar向量vector自由向量free vector单位向量unit vector零向量zero vector相等equal平行parallel平行线parallel lines向量的线性运算linear operation of vector加法addition减法subtraction数乘运算scalar multiplication三角形法则triangle rule平行四边形法则parallelogram rule交换律commutative law结合律associative law分配律distributive law负向量negative vector三角不等式triangle inequality对角线diagonal差difference余弦定理(定律)law of cosines空间space空间直角坐标系space rectangular coordinates坐标平面coordinate plane卦限octant向量的模modulus of vector定比分点definite proportion and separated point中点公式midpoint formula等腰三角形isosceles triangle向量a与b的夹角angle between vector a and b方向余弦direction cosine方向角direction angle投影projection向量在轴上的投影projection of a vector onto an axis向量的分量components of a vector对称点symmetric point数量积(点积,内积)scalar product (dot product, inner product)叉积(向量积,外积)cross product (vector product, exterior product) 混合积mixed product锐角acute angle流体fluid刚体rigid body角速度angular velocity平行六面体parallelepiped平面的点法式方程point-norm form equation of a plane法向量normal vector平面的一般方程general form equation of a plane三元一次方程three-variable linear equation平面的截距式方程intercept form equation of a plane两平面的夹角angle between two planes点到平面的距离distance from a point to a plane空间直线的一般方程general equation of a line in space方向向量direction vector直线的点向式方程point-direction form equations of a line直线的对称式方程symmetric form equation of a line方向数direction number直线的参数方程parametric equations of a line两直线的夹角angle between two lines垂直perpendicular垂直线perpendicular lines直线与平面的夹角angle between a line and a planes 平面束pencil of planes平面束的方程equation of a pencil of planes行列式determinant系数行列式coefficient determinant曲面方程equation for a surface球面sphere球体spheroid球心ball center轨迹方程locus equation旋转轴rotation axis旋转曲面surface of revolution母线generating line圆锥面cone顶点vertex半顶角semi-vertical angle旋转双曲面revolution hyperboloids旋转单叶双曲面revolution hyperboloids of one sheet 旋转双叶双曲面revolution hyperboloids of two sheets 柱面cylindrical surface, cylinder圆柱circular cylinder圆柱面cylindrical surface准线directrix抛物柱面parabolic cylinder二次曲面quadric surface截痕法method of cut-off mark椭圆锥面elliptic cone椭球面ellipsoid双曲面hyperboloid单叶双曲面hyperboloid of one sheet双叶双曲面hyperboloid of two sheets旋转椭球面ellipsoid of revolution抛物面paraboloid椭圆体ellipsoid椭圆抛物面elliptic paraboloid旋转抛物面paraboloid of revolution双曲抛物面hyperbolic paraboloid马鞍面saddle surface椭圆柱面elliptic cylinder双曲柱面hyperbolic cylinder抛物柱面parabolic cylinder空间曲线space curve交线intersection curve空间曲线的一般方程general form equations of a space curve空间曲线的参数方程parametric equations of a space curve螺线spiral / helix螺矩pitch投影柱面projecting cylinder第八章多元函数微分法及其应用Chapter 8 Differentiation of Functions of Several Variables and Its Application 一元函数function of one variable二元函数binary function邻域neighborhood去心邻域noncentral neighborhood方邻域square neighborhood圆邻域circular neighborhood内点interior point外点exterior point边界点frontier point, boundary point聚点point of accumulation导集derived set开集open set闭集closed set连通集connected set开区域open region闭区域closed region有界集bounded set无界集unbounded setn维空间n-dimensional space多元函数function of several variables二重极限double limit多元函数的连续性continuity of function of several variables连续函数continuous function不连续点discontinuity point一致连续uniformly continuous偏导数partial derivative对自变量x的偏导数partial derivative with respect to independent variable x高阶偏导数partial derivative of higher order二阶偏导数second order partial derivative混合偏导数hybrid partial derivative全微分total differential偏增量partial increment偏微分partial differential全增量total increment可微分differentiable必要条件necessary condition充分条件sufficient condition叠加原理superposition principle全导数total derivative中间变量intermediate variable隐函数存在定理theorem of the existence of implicit function 光滑曲面smooth surface曲线的切向量tangent vector of a curve法平面normal plane向量方程vector equation向量值函数vector-valued function切平面tangent plane法线normal line方向导数directional derivative等高线level curve梯度gradient数量场scalar field梯度场gradient field向量场vector field势场potential field引力场gravitational field引力势gravitational potential曲面在一点的切平面tangent plane to a surface at a point曲线在一点的法线normal line to a surface at a point无条件极值unconditional extreme values鞍点saddle point条件极值conditional extreme values拉格朗日乘数法Lagrange multiplier method拉格朗日乘子Lagrange multiplier经验公式empirical formula最小二乘法method of least squares均方误差mean square error第九章重积分Chapter 9 Multiple Integrals重积分multiple integrals二重积分double integral可加性additivity累次(逐次)积分iterated integral体积元素volume element二重积分变量代换法change of variable in double integral极坐标表示的面积area in polar coordinates扇形的面积area of a sector of a circle极坐标二重积分double integral in polar coordinates三重积分triple integral直角坐标系中的体积元素volume element in rectangular coordinate system 柱面坐标cylindrical coordinates柱面坐标系中的体积元素volume element in cylindrical coordinate system 球面坐标spherical coordinates球面坐标系中的体积元素volume element in spherical coordinate system 剥壳法shell method圆盘法disk method反常二重积分improper double integral曲面的面积area of a surface质心center of mass静矩static moment密度density形心centroid转动惯量moment of inertia参变量parametric variable第十章曲线积分与曲面积分Chapter 10 Line (Curve) Integrals and Surface Integrals对弧长的曲线积分line integrals with respect to arc length第一类曲线积分line integrals of the first type对坐标的曲线积分line integrals with respect to x, y, and z第二类曲线积分line integrals of the second type有向曲线弧directed arc单连通区域simple connected region复连通区域complex connected region路径无关path independence格林公式Green formula顺时针方向clockwise逆时针方向counterclockwise区域边界的正向positive direction of region boundary第一类曲面积分surface integrals of the first type旋转曲面的面积area of a surface of a revolution对面积的曲面积分surface integrals with respect to area有向曲面directed surface对坐标的曲面积分surface integrals with respect to coordinate elements第二类曲面积分surface integrals of the second type有向曲面之元素element of directed surface高斯公式gauss formula拉普拉斯算子Laplace operator拉普拉斯变换Laplace transform格林第一公式Green’s first formula通量flux散度divergence斯托克斯公式Stokes formula环流量circulation旋度rotation (curl)第十一章无穷级数Chapter 11 Infinite Series一般项general term部分和partial sum收敛级数convergent series余项remainder term等比级数geometric series几何级数geometric series公比common ratio调和级数harmonic series柯西收敛准则Cauchy convergence criteria, Cauchy criteria for convergence 正项级数series of positive terms达朗贝尔判别法D’Alembert test柯西判别法Cauchy test交错级数alternating series绝对收敛absolutely convergent条件收敛conditionally convergent柯西乘积Cauchy product函数项级数series of functions发散点point of divergence收敛点point of convergence收敛域convergence domain和函数sum function幂级数power series幂级数的系数coefficients of power series阿贝尔定理Abel Theorem收敛半径radius of convergence收敛区间interval of convergence幂级数的导数derivative of power series泰勒级数Taylor series麦克劳林级数Maclaurin series二项展开式binomial expansion近似计算approximate calculation舍入误差round-off error (rounding error)欧拉公式Euler’s formula魏尔斯特拉斯判别法Weierstrass test三角级数trigonometric series振幅amplitude角频率angular frequency初相initial phase矩形波square wave谐波分析harmonic analysis直流分量direct component基波fundamental wave二次谐波second harmonic三角函数系trigonometric function system傅立叶系数Fourier coefficient傅立叶级数Fourier series周期延拓periodic prolongation正弦级数sine series余弦级数cosine series奇延拓odd prolongation偶延拓even prolongation傅立叶级数的复数形式complex form of Fourier series第十二章微分方程Chapter 12 Differential Equation解微分方程solve a differential equation常微分方程ordinary differential equation (ODE)偏微分方程partial differential equation (PDE)微分方程的阶order of a differential equation微分方程的解solution of a differential equation微分方程的通解general solution of a differential equation初始条件initial condition微分方程的特解particular solution of a differential equation初值问题initial value problem微分方程的积分曲线integral curve of a differential equation 可分离变量的微分方程variable separable differential equation 隐式解implicit solution隐式通解implicit general solution衰变系数decay coefficient衰变decay齐次方程homogeneous equation一阶线性方程linear differential equation of first order非齐次non-homogeneous齐次线性方程homogeneous linear equation非齐次线性方程non-homogeneous linear equation常数变易法method of variation of constant暂态电流transient state current稳态电流steady state current伯努利方程Bernoulli equation全微分方程total differential equation积分因子integrating factor高阶微分方程differential equation of higher order悬链线catenary高阶线性微分方程linear differential equation of higher order自由振动的微分方程differential equation of free vibration强迫振动的微分方程differential equation of forced oscillation串联电路的振荡方程oscillation equation of series circuit二阶线性微分方程second order linear differential equation线性相关linearly dependence线性无关linearly independence二阶常系数齐次线性微分方程second order homogeneous linear differential equation with constant coefficient二阶变系数齐次线性微分方程second order homogeneous linear differential equation with variable coefficient特征方程characteristic equation无阻尼自由振动的微分方程differential equation of free vibration with zero damping固有频率natural frequency简谐振动simple harmonic oscillation, simple harmonic vibration微分算子differential operator待定系数法method of undetermined coefficient共振现象resonance phenomenon欧拉方程Euler equation幂级数解法power series solution数值解法numerical solution勒让德方程Legendre equation微分方程组system of differential equations常系数线性微分方程组system of linear differential equations with constant coefficient。
柯迪亚克用5053数据线开隐藏功能-整理

柯迪亚克刷隐藏功能1、遥控开锁键,单击主驾驶双击其他门【】09中央电气系统→允许进入16→输入密钥31347→匹配功能10在通道内找到(6)访问控制-ZV Tuerentriegelung 新数据选择Einzeltuerentriegelung然后点击执行完2、熄火开门后玻璃升降器依然可用★【】进入09中央电气→允许进入31347 →10匹配通道找到(14)访问控制2-Freigabenachlauf?FH?bei??Tueroeffnen?abbrechen? 改为“未激活”3、开启后备箱车内灯不亮★【】进入09中央电气→允许进入31347 →点长编码控制长编码帮助,找行李箱盖激活内部灯,把钩去掉4、紧急刹车双闪★【】进入09中央电气→允许进入31347 →点长编码控制长编码帮助,找到紧急刹车转向灯激活,打钩5、日行灯可开关(0位置关闭,AUTO位置打开)★【】进入09→访问权限31347→匹配→(9)-日间行驶灯→Tagfahrlicht nur in Schalterstellung AUTO→改成激活6、电子驻车控制日行灯★【】(开启之后,在未解除电子驻车之前,日间行车灯是不会亮的)选择09→访问权限31347→匹配→(5)日间行驶灯Tagfahrlicht Dauerfahrlicht bei Handbremse abschalten →激活7、增加MIB中日行灯开关选项【】(原配MIB的车应该都有,后加装的才需要这个步骤)?进入09→访问权限31347→匹配→(2)-日间行驶灯Tagfahrlicht Aktivierung durch BAP oder Bedienfolge moeglich→激活8、引擎盖打开后雨刮器停止【】?(高尔夫)进入09→访问权限31347→匹配→(19)雨刮→Wischer Stopp bei Oeffnen der Motorhaube→激活9、仪表自检显示斯柯达RS标志【】进入17仪表→长编码,第九字节改为0A,BIT3加BIT1打钩10、尾灯随打开的车门同侧亮【未成功】★进入09→允许进入31347→匹配10 ,leuchte20 LICHTFUNKTION F20 未激活→Tuerausstiegslicht links。
柯迪亚克用5053数据线开隐藏功能-整理

柯迪亚克刷隐藏功能1、遥控开锁键,单击主驾驶双击其他门【】?09中央电气系统→允许进入16→输入密钥31347→匹配功能10在通道内找到(6)访问控制-ZV?Tuerentriegelung??新数据选择Einzeltuerentriegelung然后点击执行完2、熄火开门后玻璃升降器依然可用★【】进入09中央电气?→允许进入31347 ?→10匹配通道找到(14)访问控制2-FreigabenachlaufFHbeiTueroeffnenabbrechen 改为“未激活”3、开启后备箱车内灯不亮★【】进入09中央电气?→允许进入31347?→点长编码控制长编码帮助,找行李箱盖激活内部灯,把钩去掉4、紧急刹车双闪★【】进入09中央电气?→允许进入31347 ?→点长编码控制长编码帮助,找到紧急刹车转向灯激活,打钩5、日行灯可开关(0位置关闭,AUTO位置打开)★【】进入09→访问权限31347→匹配→(9)-日间行驶灯→Tagfahrlicht?nur?in?Schalterstellung?AUTO→改成激活6、电子驻车控制日行灯★【】?(开启之后,在未解除电子驻车之前,日间行车灯是不会亮的)选择09→访问权限31347→匹配→(5)日间行驶灯Tagfahrlicht?Dauerfahrlicht?bei?Handbremse?abschalten →激活?7、增加MIB中日行灯开关选项?【】(原配MIB的车应该都有,后加装的才需要这个步骤)?进入09→访问权限31347→匹配→(2)-日间行驶灯Tagfahrlicht?Aktivierung?durch?BAP?oder?Bedienfolge?moeglich→激活?8、引擎盖打开后雨刮器停止?【】????(高尔夫)进入09→访问权限31347→匹配→(19)雨刮→Wischer?Stopp?bei?Oeffnen?der? Motorhaube→激活9、仪表自检显示斯柯达RS标志【】10、进入17仪表→长编码,? 第九字节改为0A,BIT3加BIT1打钩11、尾灯随打开的车门同侧亮【未成功】★进入09→允许进入31347→匹配10?,leuchte20?LICHTFUNKTION?F20?未激活→Tuerausstiegslicht?links。
Grundig 滚筒烘干机使用说明书

............... . . . .82.4 Child safety . . . ........... . . . . . .82.5 Compliance with the WEEE regulation EN and disposing of the waste product . . ..............
Grundig tumble dryer manual
Grundig tumble dryer gtn38250hgcw manual. Grundig tumble dryer gtn27110gw manual. Grundig gr 7700 tumble dryer manual. Grundig advanced heat pump tumble dryer manual. Grundig tumble dryer instructions. Grundig tumble dryer problems. Grundig tumble dryer won't turn on.
.176. Program selection and operating your machine 186.1 Control Panel . . . . . . ...... .. . . . .186.2 Preparation of drying machine. . . .196.3 Program selection . . . . . . . . . .... .196.4 Program selection and consumption chart . . . . . . . ........ .......
柯迪亚克用 数据线开隐藏功能

柯迪亚克刷隐藏功能1、遥控开锁键,单击主驾驶双击其他门【】09中央电气系统→允许进入16→输入密钥31347→匹配功能10在通道内找到(6)访问控制-ZV Tuerentriegelung 新数据选择Einzeltuerentriegelung然后点击执行完2、熄火开门后玻璃升降器依然可用★【】进入09中央电气→允许进入31347 →10匹配通道找到(14)访问控制2-Freigabenachlauf?FH?bei??Tueroeffnen?abbrechen? 改为“未激活”3、开启后备箱车内灯不亮★【】进入09中央电气→允许进入31347 →点长编码控制长编码帮助,找行李箱盖激活内部灯,把钩去掉4、紧急刹车双闪★【】进入09中央电气→允许进入31347 →点长编码控制长编码帮助,找到紧急刹车转向灯激活,打钩5、日行灯可开关(0位置关闭,AUTO位置打开)★【】进入09→访问权限31347→匹配→(9)-日间行驶灯→Tagfahrlicht nur in Schalterstellung AUTO→改成激活6、电子驻车控制日行灯★【】(开启之后,在未解除电子驻车之前,日间行车灯是不会亮的)选择09→访问权限31347→匹配→(5)日间行驶灯Tagfahrlicht Dauerfahrlicht bei Handbremse abschalten →激活7、增加MIB中日行灯开关选项【】(原配MIB的车应该都有,后加装的才需要这个步骤)?进入09→访问权限31347→匹配→(2)-日间行驶灯Tagfahrlicht Aktivierung durch BAP oder Bedienfolge moeglich→激活8、引擎盖打开后雨刮器停止【】?(高尔夫)进入09→访问权限31347→匹配→(19)雨刮→Wischer Stopp bei Oeffnen der Motorhaube→激活9、仪表自检显示斯柯达RS标志【】进入17仪表→长编码,第九字节改为0A,BIT3加BIT1打钩10、尾灯随打开的车门同侧亮【未成功】★进入09→允许进入31347→匹配10 ,leuchte20 LICHTFUNKTION F20 未激活→Tuerausstiegslicht links。
卡拉罗传动系统 каталог 2018说明书

Thanks to a solid, long-lasting collabo-ration with major international con-structions of off-highway applications, Carraro Drive Tech has now developed a consolidated know-how in the devel-opment of integrated systems devoted to all applications in the construction equipment sector, firmly position-ing itself as a highly reliable full-liner partner.An appropriate combination of trans-missions, axles and drives today al-lows Carraro to offer a complete range for backhoe loaders, forklift trucks, wheel loaders, excavators, compactors, tracked vehicles and other wheeled and tracked applications.The skills developed in power electron-ics further allow Carraro Drive Tech to integrate their transmission systems with evolved management solutions as a guarantee of an efficient integration of drivelines.The full control of the system allows for the best possible management of the ergonomics and simplicity of use by the end user, at the same time also improv-ing the efficiency of the entire system both in terms of productivity and reduc-tion of machine consumption.Carraro Drive TechDrivelines for Construction EquipmentApplications(800) 321-9983Joseph Industries, Your Authorized Carraro Distributor****************Torque Converter Transmissions synchro shuttleMAIN TecHNIcAl dATA TlB1 2WD TlB1 4WDPower Rating82 kW @ 2,200 rpm82 kW @ 2,200 rpmMax input Torque750 Nm750 NmMax input speed2,400 rpm2,400 rpmInternal Pump Type Gear GearEngine Flywheel Interface SAe 3SAe 3Output Flage Type Yoke 1410Yoke 14102WD output drop from Engine180 mm180 mm4WD output drop from Engine–323 mmVehicle Pump Interface SAe c SAe cTorque Converter Size W300W300Speed Gear 4 Fwd + 4 Rev 4 Fwd + 4 RevFwd/Rev Ratios Option1:1 / 1:0.8291:1 / 1:0.829Fwd Speed Gear Ratios 1 st 2 nd 3 rd 4 th 1 st 2 nd 3 rd 4 th5.603:1 3.481:1 1.585:10.793:1 5.603:1 3.481:1 1.585:10.793:1 MFD Ratio Options-0.8:1 / 0.818:1 / 0.895:1Electronic Control No NoReverser Power Reverse Power ReverseGear Shifting Synchro Shuttle Synchro ShuttleMFD Connection Options–SAHR dog clutch / SAHR collar Shift Parking Brake Options None / SAHR Wet discs / Manual Wet discs None / SAHR Wet discs / Manual Wet discs Spin-On Oil Filter Options Horizontal / Vertical / Remote Horizontal / Vertical / RemoteElectric System Voltage12V12VDifferential Lock Solenoid on control Valve Assy on control Valve AssyPower Brake in/out Ports15 bar nom.15 bar nom.Speed Sensor Available AvailableTemperature Sensor Available AvailablePressure Sensor Available AvailableElectrical Harness N/A N/AMAIN TecHNIcAl dATA TlB1 sPs TlB1 sPs CoaxialPower Rating82 kW @ 2,200 rpm82 kW @ 2,200 rpmMax input Torque750 Nm750 NmMax input speed2,400 rpm2,400 rpmInternal Pump Type Gear GearEngine Flywheel Interface SAe 3SAe 3Output Flage Type Yoke 1410Yoke 14102WD output drop from Engine180 mm180 mm4WD output drop from Engine323 mm334 mmVehicle Pump Interface SAe c SAe cTorque Converter Size W300W300Speed Gear 4 Fwd + 4 Rev 4 Fwd + 4 RevFwd/Rev Ratios Option1:1 / 1:0.8291:1 / 1:0.829FWD Speed Gear Ratios 1 st 2 nd 3 rd 4 th 1 st 2 nd 3 rd 4 th5.603:1 3.481:1 1.585:10.793:1 5.603:1 3.481:1 1.585:10.793:1 MFD Ratio Options0.8:1 / 0.818:1 / 0.895:11:1Electronic Control Yes YesReverser Power Reverse Power ReverseGear Shifting Servo Power Synchro Servo Power SynchroMFD Connection Options SAHR dog clutch / SAHR collar ShiftSAHR Wet clutchPermanent / SAHR dog clutchSAHR collar Shift / SAHR Wet clutch Parking Brake Options None / SAHR Wet discs / Manual Wet discs None / SAHR Wet discs / Manual Wet discs Spin-On Oil Filter Options Vertical / Remote Vertical / RemoteElectric System Voltage12V12VDifferential Lock Solenoid on control Valve Assy on control Valve AssyPower Brake in/out Ports15 bar nom.15 bar nom.Speed Sensor Yes YesTemperature Sensor Yes YesPressure Sensor Yes YesElectrical Harness Available AvailableTorque Converter Transmissions Power synchro(800) 321-9983Joseph Industries, Your Authorized Carraro Distributor****************MAIN TecHNIcAl dATA TlB2TlB2 CoaxialPower Rating82 kW @ 2,200 rpm82 kW @ 2,200 rpmMax input Torque750 Nm750 NmMax input speed2,400 rpm2,400 rpmInternal Pump Type Gear GearEngine Flywheel Interface SAe 3SAe 3Output Flage Type Yoke 1410Yoke 14102WD output drop from Engine188 mm188 mm4WD output drop from Engine350 mm350 mmVehicle Pump Interface SAe c SAe cTorque Converter Size W300W300Speed Gear 4 Fwd + 4 Rev 4 Fwd + 4 RevFwd/Rev Ratios Option1:1 / 1:0.8291:1 / 1:0.829FWD Speed Gear Ratios 1 st 2 nd 3 rd 4 th 1 st 2 nd 3 rd 4 th5.533:1 3.359:1 1.533:10.811:1 4.426:1 2.687:1 1.226:10.649:1 MFD Ratio Options0.804:11:1Electronic Control Yes YesReverser Power Reverse Power ReverseGear Shifting Power Shift Power ShiftMFD Connection Options SAHR Wet clutch Permanent / SAHR Wet clutchParking Brake Options None / SAHR Wet discs / Manual Wet discs None / SAHR Wet discs / Manual Wet discs Spin-On Oil Filter Options Horizontal / Vertical / Remote Horizontal / Vertical / RemoteElectric System Voltage12V12VDifferential Lock Solenoid on control Valve Assy on control Valve AssyPower Brake in/out Ports15 bar nom.15 bar nom.Speed Sensor Yes YesTemperature Sensor Yes YesPressure Sensor Yes YesElectrical Harness Available Available TRAXTransmission Advanced Control systemTransmissionmanagement modeSemiautomatic: management by driverAutomatic: full automatized gearshiftVehicle responsivenesscustomizationSmooth or direct clutch modulationconfigurable software by customers needsPreventionautodiagnostic systemAlarm / error signal for excessive working parametresand wrong inputs / Safety Management SIl1/ISo13849 Perf. level cAuxiliary functions differential lock and steering sensor controldata interchange with electronic dashboard platform,cAN J1939, Serial line diagnostic and servicingGeneralOperating Temperature– 40 / + 85 °cStorage Temperature– 40 / + 85 °cProtection Rating IP 67ElectricalNominal Supply Voltage12 VdcAnalog Voltage Input Range0 / 5 VdcRated Digital Output Current 2 ARated PWM Output Current 2 ARated PWM Output Frequency 4 kHzSuperimposed Dither Frequency SW-adjustableSuperimposed Dither Amplitude SW-adjustableSerial Interface Communication RS232, asynchronous, one cAN interface accordingto SAe J1939 / ISo 11783 / ISo 11898HousingElectrical Connections56 pins board-mountedHousing Material High temperature nylon (Black)Weight0.25 Kg (for reference only)Torque Converter TransmissionsPower shiftElectronic Control Unit(800) 321-9983Joseph Industries, Your Authorized Carraro Distributor****************Hydrostatic TransmissionsModel TB172TB172/2DescriptionSingle speed Two speed synchro Output drop from engine mm172172Input interfaces ccHydraulic motors Hydraulic motors 80/16080/160SAe 1410/1480SAe 1410/1480dIN 13010/1410dIN 1410Reduction ratios 2.750:1 1 st 2 nd 2.031:1 4.286:1 1.359:11.853:1 2.971:11.273:11.553:11.545:11.179:1Max Input rpm 5,5005,500Max Input torque Nm1,1001,100Park brake typedry discs manual control ball and ramp typeNote TB172/2 is available in two versions: Stop&Go and Speed ShiftModel CV2Fls 3.2ls 4.2Description2 speed power shift 2 speed power shift 2 speed power shift Output drop from engine mm182185176Input interfaces ccHydraulic motor Hydraulic motor Hydraulic motor 80/10710780/140Reduction ratios 1 st 2 nd 1 st 2 nd 1 st 2 nd 9.137:1 2.400:14,2171.0225.143:1 1.371:14.310:11.132:14.934:1 1.316:14.423:11.179:1Max Input rpm 5,5005,5005,500Max Input torque Nm7707701,100Park brake typeWet Inboard SAHRHydrostatic Powershift Transmissions(800) 321-9983Joseph Industries, Your Authorized Carraro Distributor ****************The Carraro Drive Tech range for agri-cultural use includes traditional or sus-pended axles for tractors, with engines of between 35 and 350 HP, coupled with a range of transmissions up to 150 HP. Designed to meet different needs (crop types, land dynamics, manoeuvring room, etc.) and to work in all weather conditions, the Carraro transmission systems guarantee performance that will maximise the productivity of the agricultural machines on which they are used.Thanks to a sophisticated, yet user-friendly electronic control system, the whole powertrain is managed excel-lently, both in terms of usability and efficiency. Consumptions and environ-mental impact are thereby drastically reduced.The Carraro range of agricultural trans-missions is further increased with VaryT , an evolved technology that can be applied – as a module – to all power categories. VaryT encompasses a highly innovative, unique concept in the agri-cultural sector, allowing for the devel-opment of a new generation of vehicles, featuring more comfortable and ef-ficient ‘continuous variation’ transmis-sions.Carraro Drive TechDrivelines for agricultural applicationsOur wide agricultural rangeTransmissionsHP4080120160200240280320360400T 15.0T 10.0T 5.5T 5.0T 4.0T 3.0AxlesHP408012016020024028032036040020.8020.6020.5020.4520.3220.2520.1920.1620.08-09VSF Tractors(800) 321-9983Joseph Industries, Your Authorized Carraro Distributor ****************T 3.0 Agricultural transaxle› Designed for tractors bound for the emerg-ing markets for a power range up to 42 hp with a drop final reduction providing off-set wheel center axis› The two-axis design reduces dimensions, leaving ample room for the driver area› The basic version, with 8 forward plus 2 reverse speeds and constant mesh “collar shift” gears, allows massive cost savings, Premium option with synchro reverser pro-vide the 8+8 transaxle version› The hydraulic lift draft, position and mixed control type, lift capacity 10,000 N, is de-signed for large attachments, thereby re-ducing job performance times› The mechanically operated “Ball & Ramp” wet brakes positioned close to the differ-ential act before the reduction unit and are virtually maintenance free› The mechanical pedal-controlled differential locking ensures optimal grip even on diffi-cult terrain› The optimal speed distribution between 2.6-32 Km/h allows smooth operation with the different attachments carried on the 3- point hitch or towed› 540 and 540/540E PTO speed controlled by a Single main clutch or with a double main clutch provide possibility to indipendently control the PTO versus the transmission› The SAE 4 clutch housing interfaces with dif-ferent engine makes and satisfies the need for flexibility and image demanded by the various manufacturers Advantages› Progressive gear change with the tractor onthe go› The indipendent PTO at 540 rpm or540/540E ideal for jobs with balers, rotarycultivators, etc› The indipendent PTO at 540 rpm or540/540E allows for tractor stop duringimplement useOptions› The factory fitted “Rice paddy” seals allowto work in difficult environments› The facility for mechanical-control 4WDtake-off will add further versatility to thetransaxleT 3.0InpuT DATAMaximum transmission input net power kW25,5HP34,7Max engine speed at rated power rpm2000Maximum input torque Nm149COnfIGurATIOnTotal gear[fwd x rev]8 x 28 x 816 x 4Gear box forward split[gears x ranges]4 x 2 4 x 2 4 x 2 x 2Gear box shifting Collar shift Collar shift Collar shiftGear box reverse split[gears x ranges]1 x2 4 x 2 1 x 2 x 2Reverse shifting Constant mesh Collar shift Collar shiftMAIn DATAFlange to flange distance mm1368Reference torque at rear axle Nm7800Total tractor nallasted weight Kg1900Maximum rear tire size13.6 R 28Rear tire index radius mm625Rear lift capacity at lower link kN11Total transaxle weight Kg470OpTIOns1 or2 PTo Speed, Gear synchro, Reverse sliding gear, 4WD(800) 321-9983Joseph Industries, Your Authorized Carraro Distributor****************T 4.0 Agricultural transaxle› Designed for tractors bound for the emerg-ing markets for a power range up to 45 hp with a epiciclic final reduction providing in line wheel center axis› The two-axis design reduces dimensions, leaving ample room for the driver area› The basic version has 8 forward plus 2 re-verse speeds and constant mesh “collar shift” gears, Premium option with synchro reverser provide the 8+8 transaxle version › The hydraulic lift draft, position and mixed control type, lift capacity 10,000 N, is de-signed for heavy attachments› The wet oil brakes are ball and ramp type mechanically operated, located aside of dif-ferential unit and maintenance free› The transmission is equipped with 100% dif-ferential lock controlled by a pedal› The optimal speed distribution between 2.6-30 Km/h allows smooth operation with the different attachments carried on the 3-point hitch or towed› 540 and 540/540E PTO speed controlled by a Single main clutch or with a double main clutch provide possibility to indipendently control the PTO versus the transmission› The SAE 4 clutch housing enables to inter-face a large options of different engines Advantages› Progressive gear change with the tractor onthe go› The indipendent PTO at 540 rpm or540/540E ideal for jobs with balers, rotarycultivators, etc› The indipendent PTO at 540 rpm or540/540E allows for tractor stop duringimplement useOptions› The factory fitted “Rice paddy” seals allowto work in difficult environments› The facility for mechanical-control 4WDtake-off will add further versatility to thetransaxleT 4.0InpuT DATAMaximum transmission input net power kW31HP42,2Max engine speed at rated power rpm2000Maximum input torque Nm184COnfIGurATIOnTotal gear[fwd x rev]8 x 28 x 816 x 4Gear box forward split[gears x ranges]4 x 2 4 x 2 4 x 2 x 2Gear box shifting Collar shift Collar shift Collar shiftGear box reverse split[gears x ranges]1 x2 4 x 2 1 x 2 x 2Reverse shifting Constant mesh Collar shift Collar shiftMAIn DATAFlange to flange distance mm1368Reference torque at rear axle Nm8584Total tractor nallasted weight Kg2100Maximum rear tire size13.6 R 28Rear tire index radius mm625Rear lift capacity at lower link kN11Total transaxle weight Kg470OpTIOns1 or2 PTo Speed, Gear synchro, Reverse sliding gear, 4WD(800) 321-9983Joseph Industries, Your Authorized Carraro Distributor****************T 5.0 Agricultural transaxle› The 2-shaft design reduces gearbox size and provides ample room in the driver area, significantly enhancing ergonomics and comfort› The basic configuration offers synchronized reverser› The basic version complete with synchro-nized constant mesh gears 8 forward / 8 reverse gears ensures driving comfort and reliability› The wet service brakes are designed to be virtually maintenance free and to last as long as the tractor› The basic version control is manual/me-chanical› The ground drive rear power take-off(GDPTO), allows the attachment of a motor trailer, improving versatility and traction on slopes or muddy terrain› The independent rear PTO ideal for Vine-yard/Orchard tractors and light duty STD’s which are mainly used with attachments › The SAE 3 clutch housing ensures connec-tion to different makes of diesel engine and satisfies the flexibility and brand image re-quirements of the various manufacturersOptions› Hydraulic control is available on the ver-sion with suspended pedals for tractors with cabs, etc› 12 forward / 12 reverse or 24 forward /24 reverse gears, 30 km/h or 40 km/h › The central position 4WD box option incor-porates the patented Easy-shift system and is available for the 40 km/h version › The rear PTO clutch disk can be supplied either in the “normally closed” or “normally open” version› The 540 rpm one-speed rear PTO is offered in the basic version, while the two speed 540/540E or 540/1000, available as an op-tional› The draft, position and mixed control hy-draulic lift, together with descent speed and sensitivity control, is available as an optional › Clutch housing with special length and inter-faceT 5.0T 5.5VaryT 5.5OpTIOns1 or2 PTo speed, Ground drive PTo / Mechanical or hydraulic: brakes actuation, rear diff lock actuation / Wet clutch PTo(800) 321-9983Joseph Industries, Your Authorized Carraro Distributor ****************T 5.0 VVaryT 5.0 VOpTIOns1 or2 pto speed, ground drive pto / Mechanical or hydraulic: brakes actuation, rear diff lock actuation /Wet clutch pto / Creeper speed from 0,5 km/hT 5.0 fT 5.5 fVaryT 5.5 fOpTIOns1 or2 PTo Speed, Ground drive PTo / Mechanical or hydraulic: brakes actuation, Rear diff lock actuation / Wet clutch PTo› The 2-shaft design reduces gearbox size and provides ample room in the driver area, sig-nificantly enhancing ergonomics and com-fort› The basic configuration offers synchronized reverser ensuring easy and rapid reversal when manoeuvring in narrow spaces typical of orchards› The basic version complete with synchro-nized constant mesh gears 12 forward / 12 reverse gears ensures driving comfort and reliability, as well as significant tractor cost savings› The wet service brakes, situated near the differential and before the final reduction, are designed to be virtually maintenance free and to last as long as the tractor. The basic version control is manual/mechanical, while the hydraulic control is available as an optional on the version with suspended ped-als for tractors with cabs, etc› The ground drive rear power take-off (GDP-TO), basic on the 12 forward / 12 reverse and 24 forward / 24 reverse gear versions, allows the attachment of a motor trailer, im-proving versatility and traction on slopes or muddy terrain› The independent rear PTO has been de-signed to transmit all the engine’s power and is therefore ideal for Orchard tractors › The SAE 3 clutch housing ensures connec-tion to different makes of diesel engine and satisfies the flexibility and brand image re-quirements of the various manufacturers Options› The wide range of optionals available, suchas 8/12/24 gears, 30 km/h or 40 km/h andcreeper, are designed to satisfy the needs ofstate-of-the-art, high productivity tractors› The central position 4WD box option, de-signed for 4WD front axles with central dif-ferential, incorporates the SAHR wet clutchwhich provides shifting on-the-go and underload, so as to obtain automatic braking onthe four wheels when the brake pedals areengaged. The mechanical easy shift is alsoavailable as option› The twin dry disk central clutch control com-pletes the supply› The differential lock achieved with an hy-draulically-controlled wet multidisc clutch isavaliable› The 540 rpm one-speed rear PTO is offeredin the basic version, while the two speed540/540E or 540/1000, available as an op-tional, enhances cost-convenience and ver-satility› The clutch housing with special length andinterface can be supplied on request tosatisfy specific vehicle architecture require-mentsOpTIOns1 or2 PTo speed, ground drive PTo / Mechanical or hydraulic: brakes actuation, Rear diff lock actuation /Wet clutch: PTo, MFWD, differential lock / Creeper speed from 0,5 km/h› Transmission with Dual Clutch architecture: the even gears are connected to one of the two clutches, and the odd gears to the other. When changing gear the electronic control pre-selects the required gear by means of the synchroniser, and therefore inverts the clutch transmitting the power.› Standard speeds range from 1.6 to 40 km/h. Maximum speed can be taken to 50 or 60 km/h simply by acting on the electronic control.› Possibility of changing 8 gears smoothly in Powershift mode with 4 robotised ranges, thereby avoiding range changes and clutch use in almost all field work.› The Power Reverse clutch, housed in the central part of the transmission, allows for a fully-automatic change of direction, without gear changes, thereby reducing repeated actions and cycle times.› Independent rear PTO, designed to transmit full engine power, resulting in speeds of 540/540E/1000 revs./min.› The electronic control uses an electrical-hy-draulic clutch to manage the full transmis-sion, guaranteeing the 4 drive wheels during braking and in any working conditions, as well as the differential locking.› The hydraulic system connected to the transmission can be open centre or closed centre, with a sensitive line. In both cases, significant oil flows, pressure and lifting ca-pacity are obtained.› The rear axle contains two oil-cooled multi-disc brake units and a hydraulic actuator with power brake.› Electronic control lifter with dual external cylinders guaranteeing lifting capacity of 7500 kg.Options› The Supercreeper option allows for tractor use at speeds starting from 0.2 km/h. The specific overlay of the ranges also allows for the reaching of top speeds of 40 km/h, at just 1460 revs./min.› Ground speed PTO, available on an extra axis, with a rotation regime proportional to tractor speed and allowing for the con-nection of a motorised cart. This improves versatility and traction on uneven or rugged ground.OpTIOns3 PTo speed, Ground drive PTo / Super creeper speed from 0,2 km/hShift transmissions for Construction Equipment, transaxles for Agricultural tractors, also with VaryT version。
ACR 系列谐波仪表安装使用说明书

085ACR系列谐波仪表ACR Series Harmonic Meters安装使用说明书V1.3Installation and operation instructionV1.3安科瑞电气股份有限公司ACREL CO.,LTD申明DECLARATION版权所有,未经本公司之书面许可,此手册中任何段落、章节内容均不得被摘抄、拷贝或以任何形式复制、传播,否则一切后果由违者自负。
本公司保留一切法律权利。
本公司保留对本手册所描述之产品规格进行修改的权利,恕不另行通知。
订货前,请垂询当地代理商以获悉本产品的最新规格。
No part of this publication may be reproduced,stored in a retrieval system,or transmitted in any form by nay means,electronic,mechanical photocopying,recording,or otherwise without prior permission of Acrel. All rights reserved.This company reserve power of revision of product specification described in this manual,without notice.Before ordering,please consult local anget for the latest specification of product.目录CONTENTS1 概述General......................................................................................................................................................... - 1 -2 产品规格及功能特点Specification and features ............................................................................................. - 1 -2.1系列产品规格 Series Products specification ............................................................................................ - 1 -2.2系列产品辅助功能auxiliary functions of series products .......................................................................... - 3 -3 技术参数 Technical parameter .......................................................................................................................... - 6 -4 安装接线说明Instruction of installing connection ........................................................................................... - 7 -4.1安装尺寸installing size ............................................................................................................................... - 7 -4.2接线方法 Method of connection ................................................................................................................. - 8 -5 包装 Package .................................................................................................................................................... - 10 -6 工程施工注意事项Notice in engineering construction ................................................................................. - 10 -6.1电压输入V oltage input .............................................................................................................................. - 10 -6.2电流输入Current input .............................................................................................................................. - 10 -6.3通讯接线 Communication connection ...................................................................................................... - 11 -7 操作说明Operation description ....................................................................................................................... - 12 -7.1 ACR220ELH /ACR320ELH操作指南Operating guide ........................................................................... - 12 -7.2 ACR230ELH/ACR330ELH操作指南Operation guide ............................................................................ - 26 -8 通讯说明Communication description............................................................................................................. - 40 -8.1简介General ............................................................................................................................................... - 40 -8.2通讯地址表 Communication Address Table ........................................................................................... - 40 -8.3 通讯值与实际值对应关系(约定Val_t为通讯读出值,Val_s为实际值)Communication reading value Vsactual value(Take Val_t as Communication reading value,Val_sas actual value) ............................................. - 55 - 9 DL/T-645通讯指南Communication Guideline............................................................................................... - 58 -9.1 DL/T645-1997协议简述DL/T645-1997 protocol overview ................................................................. - 58 -9.2传输方式 Transmission mode ................................................................................................................... - 59 -9.3协议 Protocol ............................................................................................................................................. - 59 -10 平均值、极值、不平衡度相关说明Explanation of average value、extremum、unbalance................ - 65 -10.1按键操作指南Key operation guide ......................................................................................................... - 65 -10.2 通讯说明Communication description .................................................................................................... - 67 - 11以太网设置Ethernet network settings ................................................................................................................ - 76 -11.1 网络设置Network settings ................................................................................................................ - 76 -11.2 WEB网页配置WEB page configuration......................................................................................... - 77 -11.3 仪表设置Instrument settings ............................................................................................................ - 78 -11.4 ModScan32设置ModScan32 settings ........................................................................................... - 79 -1 概述GeneralACR系列谐波表包括ACR220ELH,ACR230ELH,ACR320ELH,ACR330 ELH 等多款仪表,是本公司按IEC标准设计,与国际先进技术同步的综合电力监控仪表。
维宏雕刻机英文版软件英汉词典
维宏雕刻机英文版软件英汉词典——北京天通数码郑,2006.12.22一、单词和短语:2D plt depth 二维PLT加工深度AAbout NcStudio 关于NcStudioAcceleration 加速度Advanced functions 高级加工指令Advanced MDI 执行加工指令Advanced start 高级开始All axes 全部轴Auto 自动Auto mode parameter 自动参数Auxiliary functions 辅助功能BBackground 背景Bottom view 仰视图CCalibration 对刀Cancel 取消Center of circle 圆心坐标Center view 居中Change description 变换说明Clear view 清除画面Close 关闭Connection acceleration 设定弯道加速度Coordiate 坐标Copy 复制Current 实际值Current coordinate 当前工件坐标点Customize 属性Cut 剪切DDeepen 0.01mm 下降0.01毫米Delta 差值Depth 雕刻深度Disable mechanical limits 限位释放Draw the mechanical limit frame 显示行程范围EEdit 编辑Edit loaded file 编辑当前加工程序Editor 程序编辑End (mechanical) coor 终点(机械)坐标Enter simulation mode then start 进入仿真模式并开始仿真Execute 执行Exit 退出FFederate 进给速率File 文件File information 加工程序信息File name 文件名Find 查找Find the next 查找下一个Fit to window 调整至窗口大小Front view 正视图Full screen 全屏GG00 feedrate 空程速度HHeight 高度Help 帮助Horizontal 横铣how log window 显示系统日志窗口II/O state IO状态IDLE 空闲Import parameter 文件输入Inner 内框JJiggle 微调JOG 点动Jog feedrate 手动速度LLeft view 左视图Limit 限位Linear acceleration 单轴加速度List view 列表Load the saved workpiece origin 读取保存过的工件原点Log 系统日志MM.coor 机械坐标Machine 机床Machining 加工参数Machining feedrate 机器速度Machining range 加工范围Manager 程序管理Manual 手动Max 最大Maximum rpm of the spindle 主轴最高转速Midpoint 中点Midpoint X轴中点Min 最小Mirror axis 轴镜像Mobile calibrator 浮动对刀Mobile calibrator 对刀块Motion range 运动范围Motor parameter 电机参数Move to reference point 回机械原点Move to workpiece origin 回工件原点NNew 新建加工程序No information 没有加工文件信息Normal jog feedrate 手动低速Northeast 东北等轴侧视图Northwest view 西北等轴侧视图Note 注意OOK 确定Open and load 打开并编辑Operator 操作Order 序号Outer 外框PParameter 系统参数Paste 粘贴Pause 暂停Pin 引脚号PLU per mm PLT单位每毫米Pol.. 极性RRadius 圆弧半径Raise 0.01mm 上升0.01毫米Rapid jog feedrate 手动高速Ratio 显示比例Recent edited file 最近编辑的加工程序Recent loaded file 最近装载的加工程序Record X X轴记录Rectange frame mill 铣矩形边框Rectange mill 矩形铣底Remaine 剩余距离Repeat 替换Report view 详细资料Resume 断点继续Right view 右视图Round frame Mill 铣圆形边框Round mill 圆形铣底SSafe height 退刀点Save 保存Save and load 保存并装载Save as 另存为Save the current workpiece origin 保存当前工件原点Select all 全选Set work coordinate offset 设置运动坐标偏移Set workpiece coordinate 设置当前点工件坐标Set workpiece origin 设置当前点为工件原点Setting 设定值Setting directly 直接设置Show all point 显示所有输入输出点Show auto window 显示自动窗口Show current point 显示当前加工点Show editor window 显示程序编辑窗口Show file line number 显示加工程序序号Show file manager window 显示程序管理窗口Show I/O state window 显示IO状态窗口Show manual window 显示手动窗口Show parameter window 显示系统参数窗口Show this dialog-box while running 执行加工指令时仍显示本窗口Show trace window 显示加工轨迹窗口Simulate port 仿真输入点Single block 单段执行Southeast view 东南等轴侧视图Southwest 西南等轴侧视图Space 刀尖间距Spindle 主轴参数Spindle high rev 主轴高速Spindle low rev 主轴低速Spindle medial rev 主轴中速Start 开始Start (mechanical) coor 起点(机械)坐标"Start point(i.e. ,bottom-left corner)" 开始左边(即坐下角坐标)Start up/stop delay of the spindle 主轴启动(停止)时间Status bar 状态栏Stop 停止TTag 名称Thickness of the mobile calibrator 对刀块的厚度Tip of the day 每日提示Toggle polarity 反向该点极性Tool bar 工具栏Tool radius 刀具直径Top view 俯视图Total time 花费时间Trace 跟踪颜色Trace 加工轨迹Trace current line 跟踪加工程序当前行Turn on coolant 冷却开启Turn on spindle 主轴开启UUndo 撤消Unit: mm 单位:毫米Unload 卸载VVertical 纵铣View 查看WW.coor 工件坐标Width 宽度Windows 窗口Workbench 工作台行程ZZ axis Z轴Zoom in 缩小Zoom out 放大Zoom ratio 显示比例二、句子解释Clear view after opening a new file :打开新文件后自动清空跟踪视图Enable the default spindle rpm, and ignore the rm declare in the file:使用缺省转速放弃加工文件中指定的主轴转速,使用人为设置的系统缺省主轴转速Enable the default feedrate, and ignore declared in the file:使用缺省速度放弃加工文件中的指定速度,使用上面设置的系统缺省速度Enable the self-adaption optimization algorithm for the feedrate ,which will give better performance of machining effection:速度自适应优化允许系统根据加工文件的连接特性,对加工速度进行优化IJK increment mode, which means IJK values at a circle G code are incremental values from the center of the circle:IJK增量模式圆弧编程(G代码)中,圆心参数(IJK)为相对于起点的增量In order to avoid the position error caused by accidental cause, such as power off, emergency stop .please carry out this step to build or correct the mechanical coordinate after software starts up and an emergency stop occurred.:为了防止在加工过程中因以外情况,如断电,造成当前位置不准确,请在程序启动或者放生紧停之后重新执行机械原点Input displacement-per-pulse of each axis, which are the displacement between cutter and workbench wherever the motor receives a pulse:输入各个轴脉冲位移当量,即电机每发出一个脉冲,刀和工作台的相对位移Note :please restart after changing above parameters:注意:修改工作台行程需要重新启动程序Please input the password to open the manufactory parameter window:请输入口令以打开厂商参数窗口Push the left button, then all axes move to the reference point in order Z,X and Y axes:按左面按钮,则三个轴以Z,X,Y的次序全部回机械原点Please select one of the following three ways:请使用下列三种方法之一回机械原点Push the left buttons, then corresponding axis moves back to the mechanical reference points:按左列按钮,则对应轴回机械原点Reverse axis Z when import (plt or eng) file:当有文件输入(plt或eng)时Z轴反向Safe height is the Z-axis workpiece coordinate where tools does never touch workpieces accidentally:执行“回零”动作时,刀的上抬高度(相对于工件)Set the workbench dimensions, which decide when the system raises an out-of-limit alarm after the mechanical coordinate has become effective :设置工作台行程空间:如果机床运动超出此范围,则系统提示软限位报警(回机械原点后生效)Set the angle-per-pulse while Y axis is a revolving axis当Y轴是转轴时,设定脉冲角度当量The time is calculated at 100% federate, perhaps not equal to the actual value:以上时间信息均是按100%进给倍率计算出来的,所以,并不一定等于实际加工时间Tip :press TURBO(or CTRL) key jog more rapidly提示:按下高速键(或CTRL键)则高速点动Tip :this dialog-box is a model-less, it means the main window is still active:提示:现在请在手动窗口To perform a calibration action, Continue ?:执行对刀操作,继续?You can validate the mechanical coordinate directly if you confirm that you had done this step at the last start-up and *The machine is not powered off *No emergency stop occurred如果你肯定当前位置与机械坐标一致,请执行直接设定操作。
Sinumerik 840D_840Di_810D 简明操作手册

简介
02.01
0-6
Siemens AG 2001. 保留所有权利 SINUMERIK 840D/840Di/810D 简短操作指南 (BAK) – 02.01 版
02.01
章节列表
章节列表
操作者控制系统
1 2 3 4 5 6 7
设置
人工控制的操作
零件编程
管理数据
自动模式
警报和消息
Siemens AG 2001. 保留所有权利 SINUMERIK 840D/840Di/810D 简短操作指南 (BAK) – 02.01 版
02.01
1. 操作者控制系统
1.7 外接机器控制面板上按键的功能
内嵌 HMI 高级 HMI
6
心轴控制 心轴禁用
心轴停止
主轴停止 Spindle Stop
心轴启动
主轴启动 Spindle Start
7
进料控制 进料/快速横向行进禁用
进料停止
进给停止 Feed Stop
进料开始
进给开始 Feed Start
02.01
1. 操作者控制系统
1.2 长条型操作者面板 OP 010C 上按键的功能
内嵌 HMI 高级 HMI
A B 2 2 3 4 5 6
显示屏 字母数字小键盘 更正/光标键 机器区域键 回调 软键栏 ETC 键 水平方向 菜单展开
区域切换键 软键栏 垂直方向
Siemens AG 2001. 保留所有权利 SINUMERIK 840D/840Di/810D 简短操作指南 (BAK) – 02.01 版
1-11
1. 操作者控制系统
02.01
1.3 长条型操作者面板 OP 010S 上按键的功能
艾默生电容补偿器控制器用户手册说明书
v Read the manual carefully before the device isinstalled.v Only qualified staff is allowed to perform theinstallation.v Connect the relay as per the wiring diagram inthe manual.v Before connecting the relay check the supplyvoltage.v Please check whether the CT is connected atthe Main Incomer.v Connect the CT when the relay is in OFFcondition. Use suitable size cable for the CT.v Do not disturb the connection when the relay isON.v Please ensure the discharge time interval ofcapacitor.v Disconnect the device if it does not work duringcommissioning.v Do not install the device if it is in damagedcondition.OPERATION & INSTRUCTIONMANUALØSuitable for Thyristor switched Capacitor panel.ØVarious possibilities for bank selection. Including user defined bank values in KVAR. ØInput sensing line-to-line voltage.ØSelectable current input range. 1Amp and 5Amp. (CT input)ØProtection against Over/Under voltage, Over/Under ØCompensation on fundamental waveform, KVAR calculation and also the effects of supply frequency and voltage.ØØStandard 144 X 144 mm panel flush mountingarrangement. Max depth 60mm. Recommended cutout for panel front door is 138x138 mm.Features:ØMeasurement Voltage (L-L): 415 Volt + 10 %.ØInput Measurement Current: 1A / 5 A.ØContact rating for output suitable for 1Amp, 440V ØMeasurement accuracy: Class-1ØOperating temperature: 0 to 55°C. ØStorage temperature: -10 to +75°C ØOutput commands models for 8,12 and 16 output.Specifications:POWER FACTOR CONTROLLERThe Display is LCD and the factory set (Default) condition shows the PF, which is power factor, sensed from the load sensing CT i.e. the Transformer/supply grid. The screen also shows “ IND” for Inductive Power Factor & “ CAP” forCapacitive Power Factor. The last digit on the upper line of display shows the operation mode i.e. 'A 'for auto mode and 'M' for Manual mode. The bottom line of the LCD display shows capacitor bank status.Display in other Parameters:To observing other system related parameters Scroll up/down keys. Following is the sequence of the parameters displayed on LCD screen.Display Overall Values : Displays the Overall values(average) like voltage, current, Active Power, Reactive Power, Apparent power, Frequency.Display Power : Displays the power related Parameters like P .F., kW, kVA, and kVAr.Display Step kVAr : Displays the values of kVAr output i.e. measured for every step.Display Auxiliary Functions .Display:Fault Finding Guidelines:Fault TypeProbable ReasonAction to TakeUnit Does not turn ON. LCD is blank with no Backlit.q Input supply not coming.q Input side fuses blownü Check the input supply to restore ü Check fuses in the unit for OK.Unit not turning ON any capacitor banks, immediately after Power on.This is perfectly OK if unit is powered up, there is a delay of correction timethat is provided in the unit only after which units can turn on outputs.As this is normal action, need not take any action. Unit will start performing normally after the stipulated time delay.With whatever capacitor banks ON,SPF does not indicate the PF asimproved.Check connection as per controlwiring diagram. Check that Load CT put is in correct phase Correct the wiring as per the scheme requirements and the CT positioning.Relay shows Capacitive PF whilethere is No Capacitive Load Phase Sequence of CTCheck the KW in the Relay if it is negative Interchange the CT polarity.Main Energy Meter PF reading &Relay PF reading is not matched q CT position & ratingq Excessive Distance betweenRelay & Energy Meterü Check the CT position & correct it as per given in Scheme 1 or 2.ü CT wiring should be up to 10mtr.Thyristor controlled by this unit is/are not turning ON/OFF even if front LCD indication shows correct.q Wiring to the command wiring isopen circuitq Card control circuit fuses areblown Relays in SPF module faultyü Check the continuity for any open ckt.ü Check the Common terminal of relay.ü Replace the fuses in control circuit.ü If above all is in OK condition replace the SPF relay new one.Lots of faults that are seen as faults are due to wrong parameter setting. It is recommend going through the details on Parameter setting explanation part of this manual and setting them correctly.SPF relay keyboard has 7 keys,ENT - key is at center and there are UP , DOWN - for scrolling the display windows, MODE and SAVE -keys are placed at right and left side of DOWN key.MODE -key is used to have access in different mode of relay operations and also used for . For editingany parameter in the relay, press mode switch the Password window will be displayed, if password is enabled. (By default it is disabled). Enter password by using arrow keys then press ENT. Using UP & DOWN key, select one of the following mode. Ø EDIT PARAMETERS Ø AUTO OPERATION Ø MANUAL OPERATIONThen press ENT switch to enter the specific mode . (During commissioning edit the required parameters by setting in the EDIT PARAMETER mode, then follow the AUTO or MANUAL mode selection).Method for Keyboard/Display Editing:Automatic Power Factor ControllerENTMODESAVEOutput of relay contacts available up to 08 steps.Load etcediting data in the memory :For enquiry contact : 09422031641SPF-08TRefer wiring diagram in the back side of controller test certificate. Displays the unit ID,utilization counter and internal temperature TX - Transformer modeGX - Generator modeDisplay Harmonics :Displays voltage and current harmonicsEXT -PT RATIO : 0001.0CUR CT PRIMARY MAINS :1000IS TO CHANGE CT PRIMARY ?CUR CT PRIMARY MAINS :1000ENT2 TIMESNOCUT CT PRIMARY MAINS:1 000 CUT CT PRIMARY MAINS:1 004 ENTPF UP Lim : Mains [IND : 1] : 0.990YESIS TO CHANGE UP LIMIT ?NOPF Up Lim : MaIns: 0.990IND : 1CAP : OPF Up Lim : MaIns: 0.990ENTENTENTENTSAVEPF Up Lim : Mains CAP : 0 : 0.990PF Up Lim : Mains CAP : 0 : 0.999PF LOW Lim : Mains [IND :1] : 0.970PF LOW Lim : Mains[IND :1] : 0.970DISPLAY SHOWS________________DISPLAY SHOWSMODESELECTEDIT PARAMETERENTSTEP CONNECTED : 08IS TO CHANGESTEPS ?NOYESENTSTEP CONNECTED : 07ENT8STEP CONNECTED : 0DEFAULT MODE AUTO : 0COMPENSATION KVAR MEAN :1CAP BANK VOLTAGE ( L-L) : 440VCORRECTION TIME SEC : 00020IS TOCHANGE TIME ?YESENTCORRECTED TIME SEC : 00020CORRECTED TIME SEC : 000 2CORRECTED TIME SEC: 000 01ENTDISCHARGE TIME SEC : 0007 ENTIS TOCHANGE TIME ?YESDISCHARGE TIME SEC : 00070DISCHARGE TIME SEC : 000 07 DISCHARGE TIME SEC : 000 06ENTENTCORRECTION TYPEUnequal :IS TO CHANGE TYPE ?10Unequal BANK [1] KVAR :10IS TOCHANGE BANK KVAR?YESENTUnequal bank (1) KVAR : 1Unequal bank (1) KVAR : 15YES5Unequal bank (1) KVAR : 15Unequal bank (1) KVAR : 0ENTUnequal bank (2) KVAR 0015:Unequal bank (2) KVAR 0025:DISPLAY SHOWSNow the initial settings of relay is completed12345109876Easy programming to start the relay SPF-04/08/12/16YES4 TIMESFIXED -BANK SETTINGEXT FIXED KWAR :25ENTSWITCH ON SUPPLY DISPLAY SHOW= 0.976 IND A OKMODESELECTEDIT PARAMETERSTARTCONNECT 415 V AC SUPPLYL2 - Y Phase Input L1 - R phase InputS1CONNECT THE CT TERMINALS2-S1 (1A) : B phase C.T. For 1A SecondaryS2-S1 (5A) : B Phase C.T. For 5 A SecondaryCONNECT THE OUT PUT TERMINALSTO FIRING CARD S1S2L1L25A 1A COM C1C2C3C4C5C6C7C8COMEasy programming to start the relay SPF-08TSAVEP.F= 0.976 IND A OKP.F= 0.976 IND A OKP.F = 0.976 IND A OKP.F GEN SUPPLYPNNC : NO CONNECTIONv Read the manual carefully before the device isinstalled.v Only qualified staff is allowed to perform theinstallation.v Connect the relay as per the wiring diagram inthe manual.v Before connecting the relay check the supplyvoltage.v Please check whether the CT is connected atthe Main Incomer.v Connect the CT when the relay is in OFFcondition. Use suitable size cable for the CT.v Do not disturb the connection when the relay isON.v Please ensure the discharge time interval ofcapacitor.v Disconnect the device if it does not work duringcommissioning.v Do not install the device if it is in damagedcondition.OPERATION & INSTRUCTIONMANUALØØVarious possibilities for bank selection. Including user defined bank values in KVAR. ØInput sensing line-to-line voltage.ØSelectable current input range. 1Amp and 5Amp. (CT input)ØProtection against Over/Under voltage, Over/Under ØCompensation on fundamental waveform, KVAR calculation and also the effects of supply frequency and voltage.ØØStandard 144 X 144 mm panel flush mountingarrangement. Max depth 60mm. Recommended cutout for panel front door is 138x138 mm.Features:ØMeasurement Voltage (L-L): 415 Volt + 10 %.ØInput Measurement Current: 1A / 5 A.ØContact rating for output suitable for 1Amp, 440V ØMeasurement accuracy: Class-1ØOperating temperature: 0 to 55°C. ØStorage temperature: -10 to +75°C ØOutput commands models for 8,12 and 16 output.Specifications:POWER FACTOR CONTROLLERControl Wiring Diagram :The Display is LCD and the factory set (Default) condition shows the PF, which is power factor, sensed from the load sensing CT i.e. the Transformer/supply grid. The screen also shows “ IND” for Inductive Power Factor & “ CAP” forCapacitive Power Factor. The last digit on the upper line of display shows the operation mode i.e. 'A 'for auto mode and 'M' for Manual mode. The bottom line of the LCD display shows capacitor bank status.Display in other Parameters:To observing other system related parameters Scroll up/down keys. Following is the sequence of the parameters displayed on LCD screen.Display Overall Values : Displays the Overall values(average) like voltage, current, Active Power, Reactive Power, Apparent power, Frequency.Display Power : Displays the power related Parameters like P .F., kW, kVA, and kVAr.Display Step kVAr : Displays the values of kVAr output i.e. measured for every step.Display Auxiliary Functions .Display:Fault Finding Guidelines:Fault TypeProbable ReasonAction to TakeUnit Does not turn ON. LCD is blank with no Backlit.q Input supply not coming.q Input side fuses blownü Check the input supply to restore ü Check fuses in the unit for OK.Unit not turning ON any capacitor banks, immediately after Power on.This is perfectly OK if unit is powered up, there is a delay of correction timethat is provided in the unit only after which units can turn on outputs.As this is normal action, need not take any action. Unit will start performing normally after the stipulated time delay.With whatever capacitor banks ON,SPF does not indicate the PF asimproved.Check connection as per controlwiring diagram. Check that Load CT put is in correct phase Correct the wiring as per the scheme requirements and the CT positioning.Relay shows Capacitive PF whilethere is No Capacitive Load Phase Sequence of CTCheck the KW in the Relay if it is negative Interchange the CT polarity.Main Energy Meter PF reading &Relay PF reading is not matched q CT position & ratingq Excessive Distance betweenRelay & Energy Meterü Check the CT position & correct it as per given in Scheme 1 or 2.ü CT wiring should be up to 10mtr.Thyristor controlled by this unit is/are not turning ON/OFF even if front LCD indication shows correct.q Wiring to the command wiring isopen circuitq Card control circuit fuses areblown Relays in SPF module faultyü Check the continuity for any open ckt.ü Check the Common terminal of relay.ü Replace the fuses in control circuit.ü If above all is in OK condition replace the SPF relay new one.Lots of faults that are seen as faults are due to wrong parameter setting. It is recommend going through the details on Parameter setting explanation part of this manual and setting them correctly.SPF relay keyboard has 7 keys,ENT - key is at center and there are UP , DOWN - for scrolling the display windows, MODE and SAVE -keys are placed at right and left side of DOWN key.MODE -key is used to have access in different mode of relay operations and also used for . For editing anyparameter in the relay, press mode switch the Password window will be displayed, if password is enabled. (By default it is disabled). Enter password by using arrow keys then press ENT. Using UP & DOWN key, select one of the following mode. Ø EDIT PARAMETERS Ø AUTO OPERATION Ø MANUAL OPERATIONThen press ENT switch to enter the specific mode . (During commissioning edit the required parameters by setting in the EDIT PARAMETER mode, then follow the AUTO or MANUAL mode selection).Method for Keyboard/Display Editing:Automatic Power Factor ControllerENTMODESAVEOutput of relay contacts available up to 04 steps.Load etcediting data in the memory :.Suitable for Thyristor switched Capacitor panel.SPF-16TRefer wiring diagram in the back side of controller test certificate. TX - Transformer modeGX - Generator modeDisplays the unit ID,utilization counter and internal temperature Display Harmonics :Displays voltage and current harmonics For enquiry contact : 09422031641STARTCONNECT 415 V AC SUPPLYL2 - Y Phase Input L1 - R phase InputS1CONNECT THE CT TERMINALS2-S1 (1A) : B phase C.T. For 1A SecondaryS2-S1 (5A) : B Phase C.T. For 5 A SecondaryS1S2L1L2CUT CT PRIMARY MAINS:1 000 CUT CT PRIMARY MAINS:1 004 ENTPF UP Lim : Mains [IND : 1] : 0.990YESIS TOCHANGE UP LIMIT ?NOPF Up Lim : MaIns: 0.990IND : 1CAP : OPF Up Lim : MaIns: 0.990ENTENTENTENTSAVEPF Up Lim : Mains CAP : 0 : 0.990PF Up Lim : Mains CAP : 0 : 0.999PF LOW Lim : Mains [IND :1] : 0.970PF LOW Lim : Mains[IND :1] : 0.970DISPLAY SHOWS________________DISPLAY SHOWSMODESELECTEDIT PARAMETERENTSTEP CONNECTED : 04STEP CONNECTED : 07ENT8STEP CONNECTED : 0DEFAULT MODE AUTO : 0COMPENSATION KVAR MEAN :1CAP BANK VOLTAGE ( L-L) : 440VCORRECTION TIME SEC : 00020IS TOCHANGE TIME ?YESENTCORRECTED TIME SEC : 00020CORRECTED TIME SEC : 000 2CORRECTED TIME SEC: 000 01ENTDISCHARGE TIME SEC : 0007 ENTIS TOCHANGE TIME ?YESDISCHARGE TIME SEC : 00070DISCHARGE TIME SEC : 000 07 DISCHARGE TIME SEC : 000 06ENTENTCORRECTION TYPEUnequal :IS TO CHANGE TYPE ?10Unequal BANK [1] KVAR :10IS TO CHANGE BANK KVAR?YESENTUnequal bank (1) KVAR : 1Unequal bank (1) KVAR : 15YES5Unequal bank (1) KVAR : 15Unequal bank (1) KVAR : 0ENTUnequal bank (2) KVAR 0015:Unequal bank (2) KVAR 0025:DISPLAY SHOWSNow the initial settings of relay is completed12345109876Easy programming to start the relay SPF-04/08/12/164 TIMESFIXED -BANK SETTINGEXT FIXED KWAR :25ENT5A 1A COM EXT -PT RATIO : 0001.0CUR CT PRIMARY MAINS :1000IS TO CHANGE CT PRIMARY ?CUR CT PRIMARY MAINS :1000ENT2 TIMESNOYESSWITCH ON SUPPLY DISPLAY SHOWMODESELECTEDIT PARAMETERNC : NO CONNECTIONGEN SUPPLYPNEasy programming to start the relay SPF-16TSAVEIS TO CHANGESTEPS ?NOYESENT= 0.976 IND A OKP.F = 0.976 IND A OKP.F = 0.976 IND A OKP.F = 0.976 IND A OKP.F 43C1C2C3C4C5C6C7C8COMC151C16CONNECT THE OUT PUT TERMINALSTO FIRING CARDv Read the manual carefully before the device isinstalled.v Only qualified staff is allowed to perform theinstallation.v Connect the relay as per the wiring diagram inthe manual.v Before connecting the relay check the supplyvoltage.v Please check whether the CT is connected atthe Main Incomer.v Connect the CT when the relay is in OFFcondition. Use suitable size cable for the CT.v Do not disturb the connection when the relay isON.v Please ensure the discharge time interval ofcapacitor.v Disconnect the device if it does not work duringcommissioning.v Do not install the device if it is in damagedcondition.OPERATION & INSTRUCTIONMANUALØSuitable for Thyristor switched Capacitor panel.ØVarious possibilities for bank selection. Including user defined bank values in KVAR. ØInput sensing line-to-line voltage.ØSelectable current input range. 1Amp and 5Amp. (CT input)ØProtection against Over/Under voltage, Over/Under ØCompensation on fundamental waveform, KVAR calculation and also the effects of supply frequency and voltage.ØØStandard 144 X 144 mm panel flush mountingarrangement. Max depth 60mm. Recommended cutout for panel front door is 138x138 mm.Features:ØMeasurement Voltage (L-L): 415 Volt + 10 %.ØInput Measurement Current: 1A / 5 A.ØContact rating for output suitable for 1Amp, 440V ØMeasurement accuracy: Class-1ØOperating temperature: 0 to 55°C. ØStorage temperature: -10 to +75°C ØOutput commands models for 8,12 and 16 output.Specifications:POWER FACTOR CONTROLLERThe Display is LCD and the factory set (Default) condition shows the PF, which is power factor, sensed from the load sensing CT i.e. the Transformer/supply grid. The screen also shows “ IND” for Inductive Power Factor & “ CAP” forCapacitive Power Factor. The last digit on the upper line of display shows the operation mode i.e. 'A 'for auto mode and 'M' for Manual mode. The bottom line of the LCD display shows capacitor bank status.Display in other Parameters:To observing other system related parameters Scroll up/down keys. Following is the sequence of the parameters displayed on LCD screen.Display Overall Values : Displays the Overall values(average) like voltage, current, Active Power, Reactive Power, Apparent power, Frequency.Display Power : Displays the power related Parameters like P .F., kW, kVA, and kVAr.Display Step kVAr : Displays the values of kVAr output i.e. measured for every step.Display Auxiliary Functions Display:Fault Finding Guidelines:Fault TypeProbable ReasonAction to TakeUnit Does not turn ON. LCD is blank with no Backlit.q Input supply not coming.q Input side fuses blownü Check the input supply to restore ü Check fuses in the unit for OK.Unit not turning ON any capacitor banks, immediately after Power on.This is perfectly OK if unit is powered up, there is a delay of correction timethat is provided in the unit only after which units can turn on outputs.As this is normal action, need not take any action. Unit will start performing normally after the stipulated time delay.With whatever capacitor banks ON,SPF does not indicate the PF asimproved.Check connection as per controlwiring diagram. Check that Load CT put is in correct phase Correct the wiring as per the scheme requirements and the CT positioning.Relay shows Capacitive PF whilethere is No Capacitive Load Phase Sequence of CTCheck the KW in the Relay if it is negative Interchange the CT polarity.Main Energy Meter PF reading &Relay PF reading is not matched q CT position & ratingq Excessive Distance betweenRelay & Energy Meterü Check the CT position & correct it as per given in Scheme 1 or 2.ü CT wiring should be up to 10mtr.Thyristor controlled by this unit is/are not turning ON/OFF even if front LCD indication shows correct.q Wiring to the command wiring isopen circuitq Card control circuit fuses areblown Relays in SPF module faultyü Check the continuity for any open ckt.ü Check the Common terminal of relay.ü Replace the fuses in control circuit.ü If above all is in OK condition replace the SPF relay new one.Lots of faults that are seen as faults are due to wrong parameter setting. It is recommend going through the details on Parameter setting explanation part of this manual and setting them correctly.SPF relay keyboard has 7 keys,ENT - key is at center and there are UP , DOWN - for scrolling the display windows, MODE and SAVE -keys are placed at right and left side of DOWN key.MODE -key is used to have access in different mode of relay operations and also used for . Forediting any parameter in the relay, press mode switch the Password window will be displayed, if password is enabled. (By default it is disabled). Enter password by using arrow keys then press ENT. Using UP & DOWN key, select one of the following mode. Ø EDIT PARAMETERS Ø AUTO OPERATION Ø MANUAL OPERATIONThen press ENT switch to enter the specific mode . (During commissioning edit the required parameters by setting in the EDIT PARAMETER mode, then follow the AUTO or MANUAL mode selection).Method for Keyboard/Display Editing:Automatic Power Factor ControllerENTMODESAVEOutput of relay contacts available up to 12 steps.Load etcediting data in the memory ...:SPF-12TRefer wiring diagram in the back side of controller test certificate. Display Harmonics : Displays voltage and current harmonicsTX - Transformer modeGX - Generator modeDisplays the unit ID,utilization counter and internal temperature For enquiry contact : 09422031641STARTCONNECT 415 V AC SUPPLYL2 - Y Phase Input L1 - R phase InputS1CONNECT THE CT TERMINALS2-S1 (1A) : B phase C.T. For 1A SecondaryS2-S1 (5A) : B Phase C.T. For 5 A SecondaryS1S2L1L2CUT CT PRIMARY MAINS:1 000 CUT CT PRIMARY MAINS:1 004 ENTPF UP Lim : Mains [IND : 1] : 0.990YESIS TO CHANGE UP LIMIT ?NOPF Up Lim : MaIns: 0.990IND : 1CAP : OPF Up Lim : MaIns: 0.990ENTENTENTENTSAVEPF Up Lim : Mains CAP : 0 : 0.990PF Up Lim : Mains CAP : 0 : 0.999PF LOW Lim : Mains [IND :1] : 0.970PF LOW Lim : Mains[IND :1] : 0.970DISPLAY SHOWS________________DISPLAY SHOWSMODESELECTEDIT PARAMETERENTSTEP CONNECTED : 08IS TO CHANGESTEPS ?NOYESENTSTEP CONNECTED : 07ENT8STEP CONNECTED : 0DEFAULT MODE AUTO : 0COMPENSATION KVAR MEAN :1CAP BANK VOLTAGE ( L-L) : 440VCORRECTION TIME SEC : 00020IS TOCHANGE TIME ?YESENTCORRECTED TIME SEC : 00020CORRECTED TIME SEC : 000 2CORRECTED TIME SEC: 000 01ENTDISCHARGE TIME SEC : 0007 ENTIS TOCHANGE TIME ?YESDISCHARGE TIME SEC : 00070DISCHARGE TIME SEC : 000 07 DISCHARGE TIME SEC : 000 06ENTENTCORRECTION TYPEUnequal :IS TO CHANGE TYPE ?10Unequal BANK [1] KVAR :10IS TO CHANGE BANK KVAR?YESENTUnequal bank (1) KVAR : 1Unequal bank (1) KVAR : 15YES5Unequal bank (1) KVAR : 15Unequal bank (1) KVAR : 0ENTUnequal bank (2) KVAR 0015:Unequal bank (2) KVAR 0025:DISPLAY SHOWSNow the initial settings of relay is completed123451098764 TIMESFIXED -BANK SETTINGEXT FIXED KWAR :25ENT5A 1A COM C1C2C3C4C5C6C7C8COMC9C10C11C12EXT -PT RATIO : 0001.0CUR CT PRIMARY MAINS :1000IS TO CHANGE CT PRIMARY ?CUR CT PRIMARY MAINS :1000ENT2 TIMESNOYESSWITCH ON SUPPLY DISPLAY SHOWMODESELECTEDIT PARAMETEREasy programming to start the relay SPF-12TSAVE= 0.976 IND A OKP.F = 0.976 IND A OKP.F = 0.976 IND A OKP.F = 0.976 IND A OKP.F CONNECT THE OUT PUT TERMINALSTO FIRING CARDGEN SUPPLYPNNC : NO CONNECTION。
液压支架电液控制器
液压支架电液控制器(SCU)PM4操作软件手册铁法第三套自动化刨煤机系统Version 版本: Tiefa III V 1.00SUPPORT CONTROL UNIT PM4 (SCU) 支架电液控制器PM4 (SCU) (6)E NCLOSURE D ESIGN 外壳设计 (6)K EYBOARD D ESIGN 键盘设计 (7)T IEFA III F OIL 铁法第三套键盘膜片 (7)E LECTRONIC C IRCUIT C ARD A SSEMBLY 组装电子功能卡 (7)E MERGENCY S TOP/L OCKOUT F EATURES 紧急停车/闭锁功能 (8)SOLENOID DRIVER MODULE (SDM) 螺纹驱动器(电磁阀)模块(SDM) (10)POWER SUPPLY WITH INTEGRATED POWER ADAPTER (PA)配备集成电源适配器(PA)的电源 (12)ISOLATION ADAPTER (IA) 绝缘适配器(IA) (13)SENSORS 传感器 (14)P RESSURE S ENSOR 压力传感器 (14)R EED C ONTACT A DVANCING R AM 推移千斤顶测控杆 (15)SKK 24 ELECTRICAL CABLE SYSTEM 电缆系统SKK 24 (16)VIEW TO PM 4 CONNECTION PORTS PM 4 连接端口视图 (18)VALVE CONNECTIONS 阀连接 (20)SYSTEM OVERVIEW DRAWING 系统全貌图 (21)F ACE S UPPORT C OMPONENTS 工作面支架部件I (21)F ACE S UPPORT C OMPONENTS 工作面支架部件II (22)F ACE E ND S UPPORT C OMPONENTS 工作面端头支架部件 (22)S YSTEM O VERVIEW 系统全貌I - VI (23)S YSTEM MCU2 MCU2 系统 (29)THE PM4 CONTROL PANEL PM4 控制面板 (30)PM4 KEYBOARD FUNCTIONS PM4 键盘功能 (31)DISPLAY 显示 (38)D EFAULT DISPLAY 缺省显示 (38)E MERGENCY S TOP I NDICATION 紧急停车显示 (38)L OCAL L OCKOUT I NDICATION 本架闭锁显示 (38)D ISPLAY OF D ISCONNECTED OR D AMAGED S ENSORS 显示未连接或损坏的传感器 (38)MENU OVERVIEW 菜单一览表 (39)THE MENU PLAN FOR THE TIEFA III PROGRAM 铁法第三套刨煤机PM4 菜单程序 (40)A UXILIARY F UNCTIONS 辅助功能 (41)Tiefa Third Automated Plow System铁法第三套自动化刨煤机系统PM4 Operating Software Manual PM4 操作软件手册Date 日期:2006-02Version 版本:4 CONTRACT 合同05-CTKX/2324126CDD EFAULT DISPLAY 缺省显示 (41)M EASURED V ALUES 测定的数据 (42)E RROR M ESSAGES 错误信息 (43)G LOBAL P ARAMETER 共用参数 (45)I NCREMENTAL P LOWING 固定刨深刨煤方式 (47)P ROHIBIT A CTIONS 禁止动作 (50)B LOCKANCHORAGE 分段锚固 (52)S ERVICE 服务 (54)A UTOSEQUENCE (ASQ, BATCH) P ARAMETER 自动排序(ASQ, BATCH) 参数 (57)B ANKPUSH P ARAMETERS 成组推移参数 (60)PRT P ULLBACK 拉回运行轨道 (62)C ONTROL P ARAMETER 控制参数 (63)E MERGENCY S TOP 紧急停车 (64)POSITIVE SET AUTOMATIC (PSA) 初撑力自动保持(PSA) (65)F UNCTION OF PSA 初撑力自动保持功能 (65)F UNCTION D IAGRAM PSA 初撑力自动保持功能图解 (66)PM4 OPERATION 操作PM4 (67)D IRECT A DJACENT C ONTROL F UNCTIONS 直接控制邻架功能 (67)R EMOTE A DJACENT C ONTROL F UNCTIONS 遥控邻架功能 (69)A UTOSEQUENCE (ASQ) 自动排序(ASQ) (71)N EIGHBOR F ATCH 邻架成组控制 (72)B ANKPUSH 成组推移 (74)PRT P ULLBACK 拉回运行轨道 (76)P ARAMETER C HANGES 改变参数 (77)INCREMENTAL PLOWING WITHOUT MCU 不使用主控台MCU 实现定距刨煤 (78)ACTIVATION OF PLOWING MODE CON, CONVENTIONAL PLOWING (78)THE SERVER-PM4 PM4 服务器 (79)T HE M ENU P LAN OF THE S ERVER-PM4 PM4 服务器菜单 (79)A UXILIARY F UNCTIONS 辅助功能 (80)S YSTEM S TATUS M ENUE 系统状况菜单 (80)S ERVICE M ENUE 服务菜单 (82)R UNNING THE I NCREMENTAL P LOWING ONLY BY THE S ERVER-PM4只靠PM4 服务器来运行定距刨煤 (84)M OVING OF S ERVER-PM4 TO S UPPORT N O. 1 把PM4 服务器移到第1 号支架 (85)INSTALLATION OF PM4 安装PM4 (86)INSTALL THE PM4 TO THE C ABLE B RACKET 把安装到黄铜电缆托架上 (86)L OAD THE S OFTWARE 下载软件 (86)Date 日期:2006-02 Version 版本:Tiefa III V 1.00DOC NO 文件号:ECN 4007 134 BA 00 5Safety instructions 安全指南Don’t activate support functions in areas where persons are staying !有人停留在支架时不要启动支架功能!The pushing of the red emergency-stop-button only stops all running electrical activated support actions !按下红色紧急停车按钮只能停止所有电气控制的支架动作!Mining equipment (plow-system) and prt not gets switched off !刨煤机系统和运行轨道不会停止!The pushing of the black fast stop buttons in supports without PM4 only stops all running electrical activated support actions !在不配备PM4 的支架按下黑色急停按钮只能停止所有电气控制的支架动作!Mining equipment (plow-system) and prt not gets switched off !刨煤机系统和运行轨道不会停止!While working or staying longer in a support secure yourself by pushing the black support-lock-switch of the PM4 at your actual position.如果在支架工作或停留时间较长,按下本架PM4 的黑色支架闭锁按钮!The PM4 display must show ‘>> locked <<‘ !PM4 显示屏幕必须显示出‘>> locked <<‘!Check the solenoid driver for the led´s are off or red !检查螺纹驱动器显示灯是否关闭或红色!While working on plow and PRT secure yourself by pushing the black support-lock-switch of PM4 at your actual position and in both neighbor PM4s ! 当对刨煤机和运行轨道进行工作时按下本架和两侧邻架PM4 的黑色支架闭锁按钮来保护自己!The PM4 display must show ‘>> locked <<‘ !PM4 显示屏幕必须显示出show ‘>> locked <<‘ !By running the full automatic mode during incremental plowing different automatic functions in front and behind the mowing plow are possible.采用全自动模式进行定距刨煤时,可以在运行中的刨头前后实现不同的自动功能。
基于常见的几种辅助函数的构造方法的思考
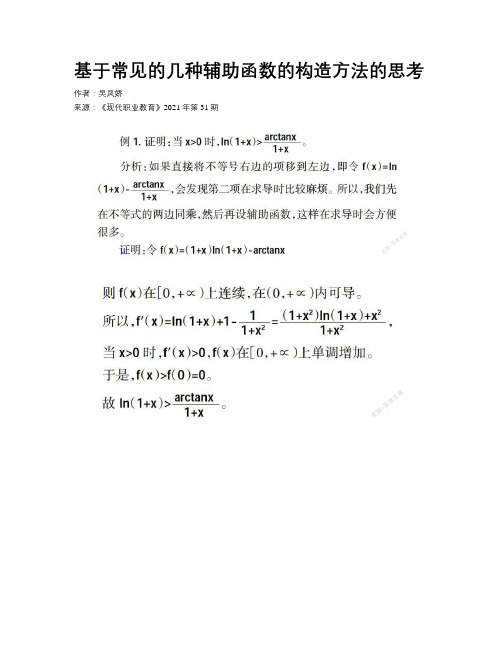
基于常见的几种辅助函数的构造方法的思考作者:***来源:《现代职业教育》2021年第31期[摘要] 在高等数学的学习中通常会遇到一些辅助函数的构造,如何根据题目的特点巧妙地构造辅助函数对解决问题十分重要。
为了说明辅助函数的构造方法,从题目类型,通过分析有效的构造辅助函数以及在教学中的思考,提高学生的自主学习能力。
[关键词] 高等数学;辅助函数;教学[中图分类号] G642 [文献标志码] A [文章编号] 2096-0603(2021)31-0156-02辅助函数的构造是数学学习中的难点之一。
如何巧妙地构造辅助函数对解题有事半功倍的效果,这也考查了学生独立思考的能力,能否将“抽象”的问题通过某个式子联系起来。
因此,在条件“不足”的情况下,我们只有根据题目的特点以及相应的关键词等重要信息,来指引学生往“特定”的方向去思考。
另外,在遇到一些比较抽象复杂的证明题时,命题人主要想考查学生能否对问题进行独立的思考、能否从题目中提取出关键的信息。
众所周知,数学题目可以千变万化,解题的方法也多种多样。
而教师要做的是指导学生找到解决问题的突破口,这才是关键,教会他们一种解题思路、一种方法,也就是所谓的“授之以鱼,不如授之以渔”。
所以,教师通过对典型例题的分析、讲解,让学生慢慢地体会、掌握此种方法,能做到举一反三。
一旦方法掌握之后,不管题目怎样变化,学生都能做出来。
所以,可以这样告诉学生,这些问题都是有“套路”的,让他们从心理上不再惧怕,不要遇到这种题目就直接放弃,要鼓励他们仔细、独立地分析题干,得出有用的信息。
经过长期的训练、方法的积累,学生才能更加自信地解题,这样他们也能够制订清晰的目标。
本文将根据以下几种题型,通过详细的分析、完整的解答,指引学生轻松构造辅助函数。
一、关于不等式的证明不等式的证明是一个难点,也是学生最怕遇到的一种题型。
但是如果我们掌握了其中的技巧——构造恰当的辅助函数,就变得简单了。
通常不等式的证明方法主要是作差法,即将不等号右边的项移到左边,使得右边变成“0”。
维宏雕刻机英文版软件英汉词典
维宏雕刻机英文版软件英汉词典维宏雕刻机英文版软件英汉词典——北京天通数码郑,2006.12.22 一、单词和短语:2D plt depth 二维PLT加工深度AAbout NcStudio 关于NcStudioAcceleration 加速度Advanced functions 高级加工指令Advanced MDI 执行加工指令Advanced start 高级开始All axes 全部轴Auto 自动Auto mode parameter 自动参数Auxiliary functions 辅助功能BBackground 背景Bottom view 仰视图CCalibration 对刀Cancel 取消Center of circle 圆心坐标Center view 居中Change description 变换说明Clear view 清除画面Close 关闭Connection acceleration 设定弯道加速度 Coordiate 坐标Copy 复制Current 实际值Current coordinate 当前工件坐标点Customize 属性Cut 剪切DDeepen 0.01mm 下降0.01毫米Delta 差值Depth 雕刻深度Disable mechanical limits 限位释放Draw the mechanical limit frame 显示行程范围 EEdit 编辑Edit loaded file 编辑当前加工程序Editor 程序编辑End (mechanical) coor 终点(机械)坐标Enter simulation mode then start 进入仿真模式并开始仿真Execute 执行Exit 退出FFederate 进给速率File 文件File information 加工程序信息 File name 文件名Find 查找Find the next 查找下一个Fit to window 调整至窗口大小 Front view 正视图Full screen 全屏GG00 feedrate 空程速度 HHeight 高度Help 帮助Horizontal 横铣how log window 显示系统日志窗口 II/O state IO状态IDLE 空闲Import parameter 文件输入 Inner 单轴加速度 List view 列表Load the saved workpiece origin Log 系统日志读取保存过的工件原点MM.coor 机械坐标Machine 机床Machining 加工参数Machining feedrate 机器速度 Machining range 加工范围 Manager 程序管理Manual 手动Max 最大Maximum rpm of the spindle 主轴最高转速Midpoint 中点Midpoint X轴中点Min 最小Mirror axis 轴镜像Mobile calibrator 浮动对刀Mobile calibrator 对刀块Motion range 运动范围Motor parameter 电机参数Move to reference point 回机械原点 Move to workpiece origin 回工件原点 NNew 新建加工程序No information 没有加工文件信息 Normal jog feedrate 手动低速Northeast东北等轴侧视图Northwest view 西北等轴侧视图Note 注意OOK 确定Open and load 打开并编辑Operator 操作Order 序号Outer 外框PParameter 系统参数Paste 粘贴Pause 暂停Pin 引脚号PLU per mm PLT单位每毫米Pol.. 极性RRadius 圆弧半径Raise 0.01mm 上升0.01毫米Rapid jog feedrate 手动高速Ratio 显示比例Recent edited file 最近编辑的加工程序 Recent loaded file 最近装载的加工程序 Record X X轴记录Rectange frame mill 铣矩形边框 Rectange mill 矩形铣底Remaine 剩余距离Repeat 替换Report view 详细资料Resume 断点继续Right view 右视图Round frame Mill 铣圆形边框Round mill 圆形铣底SSafe height 退刀点Save 保存Save and load 保存并装载Save as 另存为Save the current workpiece origin 保存当前工件原点Select all 全选Set work coordinate offset 设置运动坐标偏移Set workpiece coordinate 设置当前点工件坐标Set workpiece origin 设置当前点为工件原点Setting 设定值Setting directly 直接设置Show all point 显示所有输入输出点Show auto window 显示自动窗口Show current point 显示当前加工点Show editor window 显示程序编辑窗口Show file line number 显示加工程序序号Show file manager window 显示程序管理窗口Show I/O state window 显示IO状态窗口Show manual window 显示手动窗口示系统参数窗口 Show parameter window 显Show this dialog-box while running 执行加工指令时仍显示本窗口 Show tracewindow 显示加工轨迹窗口Simulate port 仿真输入点Single block 单段执行Southeast view 东南等轴侧视图Southwest 西南等轴侧视图Space 刀尖间距Spindle 主轴参数Spindle high rev 主轴高速Spindle low rev 主轴低速Spindle medial rev 主轴中速Start 开始Start (mechanical) coor 起点(机械)坐标"Start point(i.e. ,bottom-left corner)" 开始左边(即坐下角坐标) Startup/stop delay of the spindle 主轴启动(停止)时间 Status bar 状态栏Stop 停止TTag 名称Thickness of the mobile calibrator 对刀块的厚度Tip of the day 每日提示Toggle polarity 反向该点极性Tool bar 工具栏Tool radius 刀具直径Top view 俯视图Total time 花费时间Trace 跟踪颜色Trace 加工轨迹Trace current line 跟踪加工程序当前行Turn on coolant 冷却开启Turn on spindle 主轴开启UUndo 撤消Unit: mm 单位:毫米Unload 卸载VVertical 纵铣View 查看WW.coor 工件坐标Width 宽度Windows 窗口Workbench 工作台行程ZZ axis Z轴Zoom in 缩小Zoom out 放大示比例 Zoom ratio 显二、句子解释Clear view after opening a new file :打开新文件后自动清空跟踪视图Enable the default spindle rpm, and ignore the rm declare in the file:使用缺省转速放弃加工文件中指定的主轴转速,使用人为设置的系统缺省主轴转速Enable the default feedrate, and ignore declared in the file:使用缺省速度放弃加工文件中的指定速度,使用上面设置的系统缺省速度Enable the self-adaption optimization algorithm for thefeedrate ,which will givebetter performance of machining effection:速度自适应优化允许系统根据加工文件的连接特性,对加工速度进行优化IJK increment mode, which means IJK values at a circle G code are incrementalvalues from the center of the circle:IJK增量模式圆弧编程(G代码)中,圆心参数(IJK)为相对于起点的增量In order to avoid the position error caused by accidental cause,such as power off,emergency stop .please carry out this step to build or correct the mechanicalcoordinate after software starts up and an emergency stop occurred.: 为了防止在加工过程中因以外情况,如断电,造成当前位置不准确,请在程序启动或者放生紧停之后重新执行机械原点Input displacement-per-pulse of each axis, which are the displacement betweencutter and workbench wherever the motor receives a pulse:输入各个轴脉冲位移当量,即电机每发出一个脉冲,刀和工作台的相对位移Note :please restart after changing above parameters:注意:修改工作台行程需要重新启动程序Please input the password to open the manufactory parameter window: 请输入口令以打开厂商参数窗口Push the left button, then all axes move to the reference point in order Z,X and Y按左面按钮,则三个轴以Z,X,Y的次序全部回机械原点 axes:Please select one of the following three ways:请使用下列三种方法之一回机械原点Push the left buttons, then corresponding axis moves back to the mechanical reference points:按左列按钮,则对应轴回机械原点Reverse axis Z when import (plt or eng) file:当有文件输入(plt或eng)时Z轴反向Safe height is the Z-axis workpiece coordinate where tools doesnever touch workpieces accidentally:执行“回零”动作时,刀的上抬高度(相对于工件)Set the workbench dimensions, which decide when the system raises an out-of-limit alarm after the mechanical coordinate has become effective : 设置工作台行程空间:如果机床运动超出此范围,则系统提示软限位报警(回机械原点后生效)Set the angle-per-pulse while Y axis is a revolving axis当Y轴是转轴时,设定脉冲角度当量The time is calculated at 100% federate, perhaps not equal to the actual value: 以上时间信息均是按100%进给倍率计算出来的,所以,并不一定等于实际加工时间Tip :press TURBO(or CTRL) key jog more rapidly提示:按下高速键(或CTRL键)则高速点动Tip :this dialog-box is a model-less, it means the main window isstill active: 提示:现在请在手动窗口To perform a calibration action, Continue ?:执行对刀操作,继续,You can validate the mechanical coordinate directly if you confirm that you had done this step at the last start-up and *The machine is not powered off *No emergency stop occurred如果你肯定当前位置与机械坐标一致,请执行直接设定操作。
柯迪亚克用5053数据线开隐藏功能-整理
leuchte16?Dimming?Direction?CD16?改?minimize
leuchte17?C17?改?Blinken?rechts?Dunkelphase
leuchte17?Dimmwert?CD17?改?0
leuchte17?Dimming?Direction?CD17?改?minimize
21、变道转向灯3为5闪?★【】
选择09?→允许进入31347?→?匹配通道
找到Komfortblinken?Blinkerzyklen?→?选择将值3改成5
22、调运动指针和燃油加注量【】
运动指针:17仪表板?→编码控制?→长编码帮助?→第2字节BIT0打勾
燃油加注量:17仪表板?→编码控制?→长编码帮助?→第10字节BIT4打勾
43、leuchte24?G24?改?Blinken?rechts?Hellphase
44、leuchte24?Dimmwert?GH24?改?0
45、leuchte24?Dimming?Direction?GH24?改?Minimize
46、睫毛灯同步闪烁【】
leuchte16?C16?改?Blinken?links?Dunkelphase
(4)-Leuchte19BLKHRC31-LichtfunktionA19改成BlinkenrechtsDunkelphase
此方法是开转向灯先闪内侧再闪外侧,但是会报控制单元编码错误的故障
53、开启限速提醒功能【】
54、进入17→匹配→(1)-速度警告→未激活改成激活(3)-速度警告-速度→输入需要提醒的速度(默认为0)
55、自动启动除霜【】
56、进入08-匹配-搜索?Activa.?Autom.?Calefacc.?Windshield?deicing?MAX?-更改为ON
银行机构业务部 英语
银行机构业务部英语The Business Department of banking institutions is an essential division that plays a crucial role in the overall functioning and success of a bank. This department is responsible for managing a wide range of business activities, including client relationships, account management, and financial transactions.One of the primary functions of the Business Department is to build and maintain strong relationships with clients. The department's personnel engage in frequent communication with clients to understand their financial needs and offer suitable banking products and services. They act as the primary point of contact for clients, addressing any inquiries or concerns they may have. By building trust and rapport with clients, the department ensures customer satisfaction and loyalty, which is vital for the long-term success of the bank.Another significant responsibility of the Business Department is account management. Personnel in this department oversee the opening and closing of accounts, ensuring that all necessary documentation and legal requirements are fulfilled. They also handle account updates such as name changes, address changes, and beneficiary modifications. Additionally, the department manages account statements, which include regular updates on balances, transactions, and interest accruals. Account management ensures the accuracy and integrity of customer accounts, reflecting the bank's commitment to financial transparency and accountability.The Business Department also handles financial transactions on behalf of clients. This includes processing deposits, withdrawals, and transfers. These transactions can involve cash, checks, or electronic transfers, depending on the client's preference and the bank's technological capabilities. The department ensures accuracy, efficiency, and security in all financial transactions, minimizing the risk of errors or fraud. By providing seamless transactional services, the Business Department contributes to a positive customer experience and fosters long-term customer loyalty.In addition to these core functions, the Business Department of banking institutions may also engage in various auxiliary activities. This can include supporting loan officers by performing credit checks, assessing borrower credibility, and preparing loan documentation. The department may also handle foreign currency exchange for clients who require international monetary transactions. Some branches may provide investment advisory services, where the Business Department assists clients in making informed investment decisions to grow their wealth.In conclusion, the Business Department of banking institutions is crucial in managing client relationships, account management, and financial transactions. This department ensures effective communication, customer satisfaction, and financial transparency. It plays a vital role in the overall success and reputation of the bank, contributing to its growth and profitability.。
数据加密外文翻译

Data encryptionFirst SynopsisIn the open correspondence and in the computer system, builds the safe reliable electronic commerce platform is very important. Usually needs through the encryption method to the customer related information, like the password, the contract and so on to protect, causes it not to steal or the distortion. When the customer hands in the service application, must to the customer status validity, the text integrity carry on the confirmation.HMAC (Keyed-Hashing for Message Authentication) is a public agreement. It is one kind based on key's text complete proof technique, its security is the establishment in the Hash algorithm foundation. It requests the correspondence both sides shared system key, the agreement algorithm, to carry on the Hash operation to the text, like MD5, SHA, RIPEMD and so on, form the fixed length the authentication code. Correspondence both sides determine the text through the authentication code's verification the validity. This agreement may use for to make the encryption, the digital signature, the text confirmation and so on. HMAC may with any iteration hashing function bundle use. MD5 and SHA-1 are this kind of hashing functions.This kind of structure's leading role is:1. Does not need the revision to be possible to use the suitable hashing function. Moreover the hashing function displays in the software aspect is very good. And the sound code is public and general.2. Maintain the hashing function original performance, but does not cause its degeneration.3. Cause reasonably based on about first floor hashing function supposition message discrimination mechanism encryption strength analysis.4. When discovers either needs the operating speed is quicker or the safer hashing function, may very easy realize the first floor hashing function replace.[Annotation]: When comp book documents, MD5 and SHA-1 are use the most widespread encryption to use the hashing function.Second HMAC algorithm principles2.1 HMAC algorithm definition:Expresses as follows with the formula:HMAC=H(key or opad ,H(key or ipad,text))H(X, Y) expression carries on one kind of Hash operation to X + Y news.Representative Ipad is redundant B time single byte hexadecimal system system constant OX36;Representative Opad is redundant B time single byte hexadecimal system constant OX5C; key represents 64 bytes strings of character, is composed of the key, insufficient makes up 0;Text represents the random length text;Key length ≥L byte. When is bigger than B, passes through the Hash computation to form L byte Peru key (B is first in the Hash algorithm an iterative computation block data byte count; L is the Hash algorithm forms the text abstract the byte count, in MD5 is in 16, SHA-1 is 20).2.2 Algorithm step(1) Increases behind key K 0 founds a word length is the B string of character.(e.g., if the K word length is 20 bytes, B=60 byte, then after K, will join 44 zero byte 0x00), if the K length will be bigger than time B, should undergo hashing function processing.if (key_len > 64){ MD5_CTX tctx;MD5Init(&tctx);MD5Update(&tctx, key, key_len);MD5Final(tk, &tctx);key = tk;key_len = 16;}(2) On one step will produce the B word length's string of character and ipad make the "or else". k_ipad[i] ^= 0x36;(3) Fills data stream text to the second step result string of character.(4) Affects with H in the data stream which third step produces.transfer hashing function (MD5, SHA-1)(5) The B word length string of character which and opad first step produces does the "or else". k_opad[i] ^= 0x5c;(6) Enters again the fourth step result packing in the fifth step result.(7) Affects with H in the data stream which sixth step produces, the output final outcome.2.3 MD5 algorithmThe MD5 algorithm by circulates many times to the random length news the iterative hash operation, forms 16 Byte text abstract finally. This abstract has uniqueness to the text, may take the authentication code. Under target computer's computation speed, this abstract is difficulty with explains(1) the text fillsThe MD5 algorithm request carries on the packing to the random length text, the constitution N×64 Byte news grouping, N is an integer. And each grouping padding data is divided 2 steps. First, the packing causes the data position length exactly for (N×64-8) the Byte number, namely in text valid data replacement 1 0x1, other makes up 0x0 to satisfy the above request. Then, again on replacement 8 bytes (64) before text data length (packing, byte count). Thus, the data by the packing is 64Byte (512bit) integral multiple. Also divides 16 4 byte sub-groupings.(2) initialization MD5 parameterThe 4 4 byte shift quantity (A, B, C, D) use for to take the text abstract the starting value:A=0x01234567 B=0x89abcdef C=0xfedcba98 D=0x76543210(3) algorithmThe MD5 algorithm is to the news grouping in turn iterative algorithm. 1st time operates the starting value is ABCD, each iterative computation's result will replace later ABCD to take the next time starting value, altogether will undergo N time iterative computation, will obtain this news text abstract.2.4 realize the stepThe first step: Increases fillsIncreases padding to cause the data length (bit is unit) the mold 512 is 448. If the data length happen to is the mold 512 is 448, increases 512 to fill bit, i.e. fills the integer is 1-512. First bit is 1, other are 0 completely.The second step: Makes up lengthThe data length transformation is the 64bit value, if the length surpasses the data length scope which 64bit can express, the value retains finally 64bit, increases behind data which fills to front, causes the final data is the 512bit integral multiple. Is also the 32bit 16 time of integral multiples. In RFC1321, 32bit is called word.The third step: Initialization variableWith to 4 variables, respectively is A, B, C, D, is 32bit is long. The initialization is: A: 01 23 45 67 B: 89 ab cd ef C: fe dc ba 98 D: 76 54 32 10The fourth step: Data processingFirst defines 4 auxiliary functions: F(X, Y, Z) G(X, Y, Z) H(X, Y, Z) I(X, Y, Z) In which: X&Y expresses according to the position and, X | Y expressed that according to the position or, not(X) expressed takes according to the position instead. xor expresses according to the position different or. in the function X, Y, Z are 32bit. defines the array which needs to use: The T(i), i value 1-64, T(i) was equal to that abs(sin(i)) 4294967296 time of integral part, i is a radian.After the supposition first three step processing data length is 32*16*NbitThe fifth step: Output:Obtains finally ABCD is the output result, altogether 128bit. A is the low position, D is a top digit.Third KeyUse in HMAC the key being possible to be the random length (key which will be longer than B first by the H processing). But when the key length is smaller than the L situation is disappointing, because like this will reduce the function the working strength. The length is bigger than L the key is acceptable, but the extra length cannot remarkable enhance the function the working strength. (if a stochastic key were considered that is unreliable, then chooses a long key is unwise). The key must select (or use stochastically formidable based on stochastic seed's pseudo-random production method), and wants the periodic renewal. (the present attack has not pointed out an effective replacement key's frequency, because these attacks are not in fact feasible. However, the periodic renewal key is one latent defect basic security measure which copes with the function and the key exists, and may reduce divulges the harm which the key brings. )Forth matters needing attentionHMAC is may not revise the sound code according to the first floor hashing function to be possible to use this way to define. Especially it when uses the H function must rely on the pre-definition initialization value IV (a definite value, by each iteration hashing function when initialization its compression function assigns). However, if you want, may revise the H function the sound code to support invariable initialization value Ivs.This idea is this: The compression function the intermediate result which (K XOR opad) and (K XOR ipad) produces in the B word length block data may when the key just produced in advance calculates well. Saves first these intermediate results, then when each time has the news needs to confirm produces the H function the initialization value IV. This method must distinguish the news which has preserved the H compression function regarding two B word length block data (K XOR opad) and (K XOR ipad) the application for each. When distinguishes the short data stream, preserves such information is important. What we must stress: Treats these intermediate results to treat the key to be the same likely, and wants same to carry on the security.The above choice realizes the result which the HMAC method is local carries out, to internal operational has not affectedFifth safeHere will explain that the message discrimination mechanism the security is decided by the hashing function encryption characteristic which uses: 1. Anti-conflict attack capability (is restricted in initialization value is only stochastic, and secret, and function output to aggressor is not available situation) 2. Treats as uses when the single block data the H compression function the message discrimination attribute (in HMAC these block data is part unknown, when aggressor self-restraint interior H functional calculus result, and aggressor cannot full choice)In HMAC uses above the hashing function has or a stronger attribute generally. In fact, if a hashing function does not have above attribute that it not to be suitable regarding the majority encryption application procedure, including based on this function choice message discrimination plan. (see also [BCK1] to HMAC function principle detailed elaboration and complete analysis), so long as obtains about the candidate hashing function encryption intensity limited trust, then observes it to use in the message discrimination the security and the following HMAC structure two kind of attributes is very important.1. This kind of structure is the independence in the hashing function which concrete uses, and the latter is may encrypt the hashing function substitution by any other securities2. The message discrimination was opposite in the encryption is one kind “the instant” the influence. Public can cause this plan to one kind of message discrimination plan's destruction to replace, but it to has distinguished the information is actually helpless. This forms the sharp contrast with the encryption. If its encryption algorithm is explained. Today encrypts the data, can receive in the future the threat which explains,To the HMAC known most powerful attack is based on the hashing function conflic t frequency. (“birthday attack law” [PV, BCK2], but is not suitable completely for the smallest rational hashing function.数据加密一简介在开放的通信和计算机系统中,建立安全可靠的电子商务平台是十分重要的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
template <class T, class Compare> inline const T& max (const T& a, const T& b, Compare comp) { return comp(a,b) ? b : a; } }
The comparison argument might be a function or a function object that compares both arguments and returns whether the first is less than the second in some particular order (function objects are introduced in Section 5.9).
I l@ve RuBoard
4.4 Auxiliary Functions
The algorithm library (header file <algorithm>) includes three auxiliary functions, one each for the selection of the minimum and maximum of two values and one for the swapping of two values. 4.4.1 Processing the Minimum and Maximum The functions to process the minimum and the maximum of two values are defined in <algorithm> as follows:
//overloaded global swap() for this type inline void swap (MyContainer& c1, MyContainer& c2) { c1. swap (c2); //calls implementation of swap()
3
}
So, calling swap() instead of swapping the values directly might result in substantial performance improvements. You should always offer a specialization of swap() for your own types if doing so has performance advantages.
//call max() with special comparison function pmax = max (px, py, int_ptr_less); ... }
Note that the definition of min() and max() require that both types match. Thus, you can't call them for objects of different types: inti; long l; ... l = std::max(i,l) ;
If both values are equal, generally the first element gets returned. However, it is not good programming style to rely on this. Both functions are also provided with the comparison criterion as an additional argument: namespace std { template <class T, class Compare> inline const T& min (const T& a, const T& b, Compare comp) { return comp(b,a) ? b : a; }
/* function that compares two pointers by comparing the values to which t */ bool int_ptr_less (int* a, int* b) { return *a < *b; }
int main() { int x = 17; int y = 42; int* px = &x; int* py = &y; int* pmax;
I l@ve RuBoard
4ห้องสมุดไป่ตู้
namespace std { template<class T> inline void swap(T& a, T& b) { T tmp(a); a = b; b = trap; } }
By using this function you can have two arbitrary variables x and y swap their values by calling std::swap(x,y);
Of course, this call is possible only if the copy constructions and assignments inside the swap() function are possible. The big advantage of using swap() is that it enables to provide special implementations for more complex types by using template specialization or function overloading. These special implementations might save time by swapping internal members rather than by assigning the objects. This is the case, for example, for all standard containers (Section 6.1.2) and strings (Section 11.2.8). For example, a swap() implementation for a simple container that has only an array and the number of elements as members could look like this: class MyContainer { private: int* elems; //dynamic array of elements int numElems; //number of elements public: ... //implementation of swap() void swap(MyContainer& x) { std::swap(elems,x.elems); std::swap(numElems,x.numElems); } ... };
//ERROR: argument types don't match
However, you could qualify explicitly the type of your arguments (and thus the return type): l = std::max<long>(i,l) ;
1
The following example shows how to use the maximum function by passing a special comparison function as an argument:
// util/minmax1.cpp #include <algorithm> using namespace std;
namespace std { template <class T> inline const T& min (const T& a, const T& b) { return b < a ? b : a; }
template <class T> inline const T& max (const T& a, const T& b) { return a < b ? b : a; } }
//OK
4.4.2 Swapping Two Values
2
The function swap() is provided to swap the values of two objects. The general implementation of swap() is defined in <algorithm> as follows: