SAMSON阀门定位器
samson 3730系列电气阀门定位器 安装说明

EB 8384-4 ZH13730系列 电气阀门定位器 3730-4型PROFIBUS-PA 通信 图1:3730-4型 安装与操作说明 EB 8384-4 ZH固件版本K 1.12/R 1.45 2008年7月版EB 8384-4 ZH 2目录目录页码1 设计与工作原理 (9)1.1 附加的设备 (10)1.2 通信 (10)1.3 技术数据 (11)2 装配到控制阀-安装件和附件 (14)2.1 直接集成装配 (18)2.1.1 3277-5型执行器 (18)2.1.2 3277型执行器 (20)2.2 根据IEC60534-6标准进行装配 (22)2.3 装配到3510型微流量控制阀 (24)2.4 装配到角行程执行器 (26)2.5 用于双动作执行器的反向放大器 (28)2.5.1 安装压力表 (28)2.6 安装一个分体式阀位传感器 (30)2.6.1 直接集成安装阀位传感器 (30)2.6.2 根据IEC60534-6标准安装阀位传感器 (30)2.6.3 将阀位传感器安装到3510型微流量控制阀 (32)2.6.4 将阀位传感器安装到角行程执行器 (34)2.7 安装有不锈钢壳体的定位器 (36)2.8 单动作执行器的吹扫气功能 (36)3 连接 (38)3.1 气动连接 (38)3.1.1 信号压力表 (38)3.1.2 供气压力 (38)3.2 电气连接 (40)3.2.1 建立通讯 (42)4 操作 (44)4.1 使用调整和显示 (44)4.2 确认和选择参数 (46)4.3 操作模式 (47)4.3.1 自动及手动操作模式 (47)4.3.2 SAFE—故障-安全位置 (48)5 启动与设置 (48)5.1 确定故障-安全位置 (49)EB 8384-4 ZH 3目录5.2 设置输出气量限制Q (49)5.3 调整显示方向 (50)5.4 信号压力限制 (50)5.5 检查定位器的工作范围... (50)5.6 初始化 (52)5.6.1 初始化模式 (54)5.7 出错/故障 (60)5.8 零点校正 (61)5.9 复位到默认值 (61)5.10 通过本机接口启动(SSP) (62)5.11 设定总线地址 (62)6 状态和诊断报警 (64)6.1 标准版EXPERT自诊断 (64)6.2 增强版EXPERT+自诊断 (64)6.3 状态报警的分类和缩写状态 (65)7 调整限位开关 (68)8 快速启动指南 (69)8.1 安装 (69)8.2 启动 (70)8.3 初始化 (71)8.3.1 最简单的方法(M A X) (71)8.3.2 精确方法(NOM) (71)8.3.3 手动方法(MAN) (72)9 安装感应限位开关 (73)10 维护 (74)11 防爆型设备的维护 (74)12 PROFI BUS-PA通信 (75)12.1 综述 (75)12.2 循环数据交换 (75)12.2.1 GSD文件 (76)12.2.2 数据交换 (77)12.2.3 应用在PC37控制系统上 (81)12.2.4 定位器启动常规指导 (81)12.3 CHE CKBACK-设备状态 (81)EB 8384-4 ZH4目录 12.4 所测量数值的状态编码 (83)12.4.1 行规 3.01的状态报警 (83)12.4.2 行规 3.01的状态报警的缩写状态 (87)12.5 带PROFIBUS-DP的自诊断 (92)12.6 非循环数据交换 (98)13 通过TROVIS-VIEW软件设置 (99)13.1 概述 (99)13.1.1 系统要求 (99)13.2 TROVIS-VIE W 软件的安装 (100)13.3 启动TROVIS-VIEW和完成基本设置 (101)13.4 数据传输 (103)13.4.1 离线操作(间接的数据传送) (104)13.4.2 在线操作(直接的数据传输) (104)13.4.3 设定参数 (105)13.5 初始化定位器 (107)14 附录 (110)14.1 代码表 (110)14.2 参数表 (130)15 尺寸mm (184)鉴定证书 (185)EB 8384-4 ZH 5定位器版本修改阀门定位器软硬件版本修改通信旧版本新版本K 1.00 K 1.01内容修改K 1.01 K1.10FEATURE_SELECT参数支持以下设定:激活的诊断功能可以通过GOOD_FUNCTION_CHECK或BAD_FUNCTION_CHECK来报告K1.10 K1.11-更多数据记录状态显示(见144页)-更多附加功能(FEATURE_SELECT)(见144页)-可以按照需求定义离散的阀位(POS_D_LIMIT_LOW,POS_D_LIMIT_UP)(见75页)K1.11 K1.12重新设置设别参数会将控制器内的所有参数复位。
SAMSON 3780说明书

SAMSON 3780说明书调节阀维护及操作规程DCS系统对调节阀的控制主要通过调节阀自身的电气阀门定位器完成。
我司生产线上的调节阀为德国SAMS ON调节阀,SAMSON调节阀采用智能数字阀门定位器(3780,HART协议数字通信),其控制精度高,运行稳定。
定位器的主要性能介绍如下:结构与工作原理HART电气定位器是为连接气动调节阀而设计的,它可确保阀杆位置(受控变量)与控制信号(参考变量)之间的对应关系。
它将控制装置 4至20mA的输出信号和调节调的行程相比较,并产生一个相应的压力信号作为输出变量。
为此,用户需要提供辅助气源压力1.4-6巴。
定位器辅助能源是由4到20mA参考变量信号提供。
定位器由一个感应,非接触或位移传感系统,一个由2/2-通开关阀组成的电控阀块以及一个电控单元组成。
电控单元包含两个用于处理控制算法及管理通讯的微控器.一旦实际阀门行程值(实际值)与参考变量(设定点)之间出现偏差,微控器就会产生一个二进制脉冲调制信号去控制两个 2/2通开关阀,且分别由一个指定的放大器来控制。
其中一个阀控制排气,另一个控制气源.气源阀(3)将供气(7气源压力1·46巴)送到执行器(填充)。
排气阀(将执行器排出空气流排放到大气中(排气)。
这些开关阀即可以有开关状态—一常开。
常闭—一也可产生可变宽度的单脉冲。
对于这两个受控_阀门,阀林将会移动到与参考变连量相对应的位置。
如果没有系统偏差气源阀和排气阀都将关闭。
作为一个标准功能,定位器配有一个故障信息输出(根据DDN19Z34,NANUR标准的进制输出),用于向控制室发送故障信号。
成的激活位于定位器铰接盖上的写保护开关‘可防止设定被HART通讯修改。
作为对标准定位器型号的补充,有几个附加的选项用于扩展定位器功能。
带眼位开关的定位器为了在故障一安全电路中指示出阀门的最终位置,两个软件限位开关或两个接近开关被带强制排空功能的定位器一个控制定位器的6-24V电压信号,使得信压力施加到执行器。
阀门定位器SAMSON阀门变送器
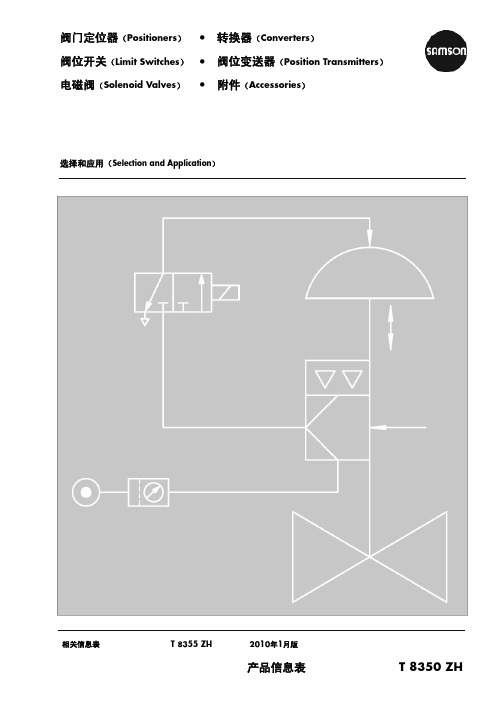
产品信息表 (Information Sheet ) T 8350 ZH 2010年1月版 1 阀门定位器(Positioners ) •转换器(Converters )阀位开关(Limit Switches ) •阀位变送器(Position Transmitters ) 电磁阀(Solenoid Valves ) •附件(Accessories )选择和应用(Selection and Application )相关信息表 T 8355 ZH 2010年1月版产品信息表 T 8350 ZH阀门定位器、转换器、阀位开关、阀位变送器、电磁阀和闭锁阀都是为使气动控制阀满足工业过程需要而设计的附属装置/附件。
空气过滤减压阀和气源减压组件用于为气动仪表提供合适的压缩空气。
阀门定位器用于按预先选定的阀位(被调参数x)和输入控制信号(给定值w)之间的对应关系进行准确定位。
阀门定位器将气动或电动控制设备(控制器、控制站、过程控制系统)输出的控制信号与控制阀的行程/开启角进行比较,进而产生一个气动输出压力(P st)(输出变量y)。
阀门定位器通常作为伺服放大器将低能量的输入控制信号转换为与其成比例的具有一定功率的输出信号压力,最大可到气源压力(6bar/90psi)。
阀门定位器可用于标准或分程控制。
根据输入控制信号类型,可分为气动阀门定位器(p/p)和电气阀门定位器(i/p)。
气动阀门定位器接受输入控制信号为0.2至1.0巴(3至15psi),进而产生最大6巴(90psi)的输出信号压力P st。
电气阀门定位器使用的输入控制信号为4至20mA或1至5mA直流电流信号,产生最大6巴(90psi)的输出信号压力(P st)。
3730-3型和3731-3隔爆型数字式电气阀门定位器附加有在现场设备与过程控制系统间的HART®通信。
3730-4型数字式电气阀门定位器带Profibus通信、3730-5型和3731-5隔爆型型数字式电气阀门定位器带Ff通信,为现场总线型智能阀门定位器,应用集成到现场总线系统的现场控制元件。
萨姆森SAMSON定位器调试注意事项
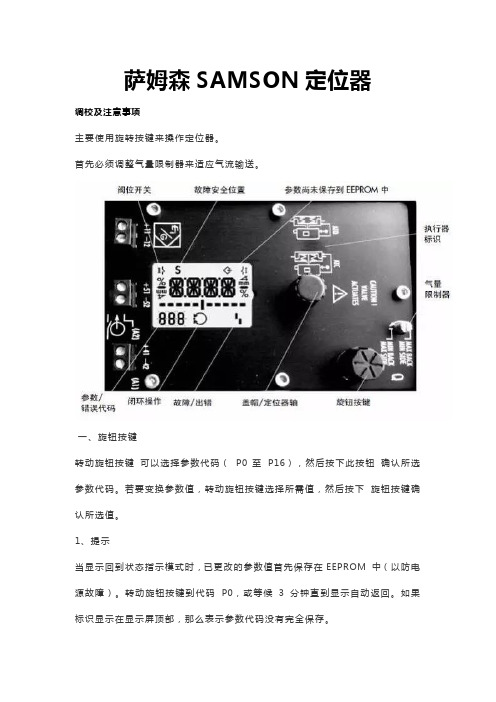
萨姆森SAMSON定位器调校及注意事项主要使用旋转按键来操作定位器。
首先必须调整气量限制器来适应气流输送。
一、旋钮按键转动旋钮按键可以选择参数代码(P0至P16),然后按下此按钮确认所选参数代码。
若要变换参数值,转动旋钮按键选择所需值,然后按下旋钮按键确认所选值。
1、提示当显示回到状态指示模式时,已更改的参数值首先保存在EEPROM 中(以防电源故障)。
转动旋钮按键到代码P0,或等候 3 分钟直到显示自动返回。
如果标识显示在显示屏顶部,那么表示参数代码没有完全保存。
2、注意在参数代码P2、P3、P4 和P8 改变后,需重新初始化定位器。
气量限制器Q Q 气量限制器是用来调节空气输送使之适应执行器尺寸。
根据执行器气路方式不同可以选择两种不同的设置。
二、气量限制器在送气时用于适配执行器的尺寸。
►执行器传输时间<1s,如有效膜片面积小于240cm2 的线性执行器,需要限制空气流量(MIN)。
►执行器传输时间≥1s, 不需要限制空气流量(MAX)。
气量限制器Q 的位置同样取决于信号压力如何作用在SAMSON执行器上:►“SIDE”(侧面)位置适用于执行器在侧面连接信号压力,如3271-5。
►“BACK”(后面)位置适用于执行器在后面连接信号压力,如3277-5“SIDE”也适用于非SAMSON 的执行器。
1、显示LC 显示器指示出设定代码和功能的符号。
棒形图通过(+/-)符号及数值显示出控制偏差,棒形图的一格表示为1%的控制偏差。
若定位器没有初始化,棒形图不指示控制偏差,而是指示反馈杆相对于阀杆/轴的偏转角度。
棒形图的一格对应大约5°的偏转角度。
如果显示屏上出现表示故障的符号,那么要旋转旋钮按键直到ERR 出现,查看错误代码E0 至E15。
详见5.6 节。
2、启动警告当装置正在运行时,不要启动系统。
在施加供气与电信号时,控制阀可能会在整个行程范围或旋转角范围内移动,范围取决于设定参数。
►连接气源(SUPPLY 9)►给定输入控制信号4 至20 mA, (接线端子11 和12)。
SAMSON(萨姆森)阀门定位器调试步骤

SAMSON(萨姆森)阀门定位器调试步骤Ø 1.1定位器的基本描述1.定位器的基本介绍该定位器是由SAMSON公司生产的 3730-3型数字式电气阀门定位器。
阀门定位器的基本组成:电子行程传感器系统、模拟电/气转换系统、带微处理器的电子单元。
其显示屏显示符号含义和各按钮作用在以下几图中详细介绍。
显示含义及其按钮位置图Ø 1.2调试前准备工作1.准备工具:十字螺丝刀(1×100mm)、一字螺丝刀(3×100mm)、活动扳手(8寸)、活动扳手寸(10寸)、万用表、对讲机等。
2.检查定位器,电磁阀,反馈开关接线。
3.检查阀门供气压力并对过滤减压阀排污。
Ø 1.3阀门定位器的菜单介绍及自整定1.菜单“0”项为操作模式,共有四项注意:若要选择相应的菜单项,先用黑色旋钮旋转至相应的菜单选项,比如“0”选项,按下黑色旋钮,当“0”闪烁时,再旋转黑色旋钮旋转至相应选项,比如“MAN”项,再次按下黑色旋钮确定,完成操作,此方法以下均适用。
MAN为手动操作模式AUTO为自动操作模式SAFE为故障-安全位置ESC为取消在此我们选择AUTO(自动模式)2.菜单“1”项为手动给定阀门行程,此菜单项只有将“0”项菜单选择为MAN(手动模式)时才会出现,此时可转动旋转按钮手动给定阀门行程。
3.菜单“2”项可调整显示方向,即将显示器的可视方向调整180°4.菜单“3”项为确认允许组态,有三个菜单选项NO、YES、ESC 通过旋转按键选择“YES”对定位器进行组态5.菜单“4”项为连接销钉位置,此处根据现场阀门选择90°,即角行程执行机构。
注意:操作此项时,必须将“3”项选为YES6.菜单“5”项为额定范围,此项我们不做调整。
注意:操作此项时,必须将“3”项选为YES7.菜单“6”项为初始化模式,共有六项:MAX:控制阀的最大范围,从气动执行器的关闭至另一方向停止点(即控制阀从全关到全开)阀内件的行程/转角NOM:控制阀的工作范围,从关闭位置到指示的开位置阀内件的行程/转角MAN:手动选择范围SUB:在线替换校验(紧急模式)ZP: 零点校验ESC :取消在此我们选择“MAX”,按下初始化按钮,阀门开始自整定。
萨姆森调节阀定位器的安装及校准

萨姆森调节阀定位器的安装及校准一、Samson 3730-2型定位器特点1、易于装配到带SAMSON直接集成安装连接口,NAMUR凸缘的直行程或角行程气动执行机构,以及控制阀带符合IEC 60534-6-1标准的杆型支架上,或者符合VDI/VDE 3845标准的角行程气动执行机构2、任意的安装位置3、简单的单旋钮按键,菜单调用操作4、方便读数,可根据读数方向需要选择改变LCD显示方向5、使用TROVIS-VIEW软件经SSP串行接口由PC机进行组态6、可变的自动启动具有4种不同的初始化模式7、在紧急情况,同时生产现场不允许控制阀进行全行程动作时,使用“Sub”初始化模式(替换法)对阀门定位器进行替换后的启动8、输出信号压力限值可调9、可激活紧急关闭功能10、标配2个可组态的阀位报警二、技术参数(数据表)三、组成3730-2/3型数字式电气阀门定位器主要由带微处理器的电子单元、模拟的电气转换器和输出气动放大器以及阀位传感器(角位移传感器)组成。
1、Samson 3730-2型定位器功能原理图2、外形尺寸图3、原理1、阀门定位器接受控制系统或控制器输出的电动控制信号,按预先设置关系辅助气动执行机构调整阀位并实现准确定位。
2、阀门定位器将输入控制信号(给定参数w)和控制阀位行程或旋转角(被调参数x)反馈量进行比较、处理,进而输出相应的气动控制信号pst(输出参数y)给气动执行机构3、当输入控制信号变化或有阀位偏差,则对气动执行机构加压或泄压若需要,可调整输出气量改善信号压力作用,4、还可由软件设置输出信号压力限制值1.4、2.4或3.7巴。
带有固定设定值的气量定值器(9)可保持一恒定气量排空,用于阀门定位器壳内正压吹扫和优化气动放大器输出容量。
5、由气源压力定值器(8)向电气转换器(6)的提供恒定压力的气源,且不受外部气源压力变化影响。
4、气动连接5、安装与连接6、电缆连接确定行程反馈杆和连接销钉位置必须满足行程及要求7、显示与定位器内部功能图四、萨姆森定位器校正1、定位器面板2、操作1、阀门定位器由用户容易掌握使用的单旋钮按键进行操作,通过转动旋钮按键选择参数,按下旋钮按键激活需要的设定。
samson 3760 型 气动阀门定位器 电气阀门定位器 说明书

EB 8385 ZH13760型气动阀门定位器 电气阀门定位器图1·3760型定位器安装与操作说明EB 8385 ZH2008年6月版目录目录页码1 设计和工作原理 (6)2 装配到气动执行器 (8)2.1 调整操作方向 (8)2.2 根据IEC 60534-6标准进行装配 (10)3 连接 (13)3.1 气动连接 (13)3.1.1 信号压力指示 (13)3.1.2 供气压力 (13)3.1.3 防护级别IP65 (13)3.2 电气连接 (14)3.2.1 开关放大器 (14)4 操作....................................................................... (15)4.1 起始值和给定值................................................................. (15)4.2 对“气动执行器杆伸出”的调整 (16)4.3 对“气动执行器杆缩回”的调整 (17)5 调整阀位开关...................................................................... . (18)5.1 阀位开关的改装................................................. . (18)6 定位器形式转换................................................................... . (20)6.1 气动式p/p转型成电气式i/p (21)6.2 电气式i/p转型成气动式p/p (22)7 尺寸mm ................................................................. (23)测试证书EB 8385 ZH2安全指导EB 8385 ZH 3EB 8385 ZH4定位器 型号 3760- X X X X X X防爆保护不带根据ATEX 指令的Ex II 2G EEx iA IIC T6 CSA/FM根据ATEX 指令的Ex II 3 G EEx nA II T6 附件不带感应接近开关气动连接 G1/81/8NPT电气连接 不带M20 x 1.5 蓝色M20 x 1.5 黑色 插塞接头符合 DIN 43650 输入控制信号 0.2 至 1 bar / 3 至 15 psi 4 至 20 mA 带 i/p 模块 6109 0 至 20 mA 带 i/p 模块 6112 1 至 5 mA 带 i/p 模块 6112选型0 1 3 80 1 2 3011201230122EB 8385 ZH5行程范围 0至5, 0至7。
SAMSON萨姆森定位器调试方法
SAMSON萨姆森定位器调试方法
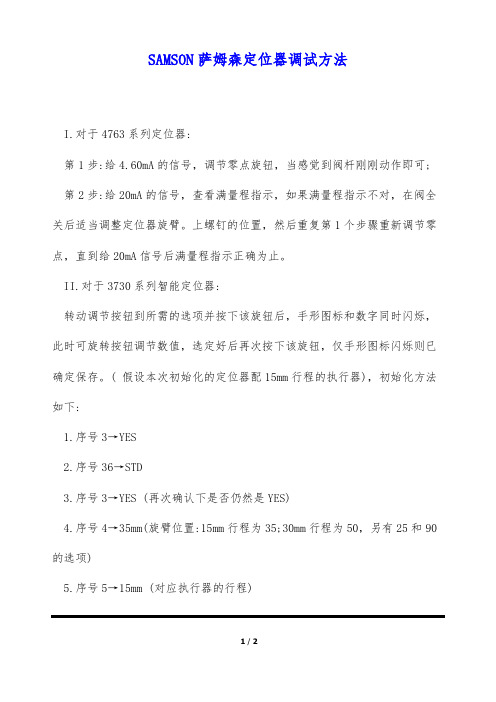
I.对于4763系列定位器:
第1步:给4.60mA的信号,调节零点旋钮,当感觉到阀杆刚刚动作即可;
第2步:给20mA的信号,查看满量程指示,如果满量程指示不对,在阀全关后适当调整定位器旋臂。
上螺钉的位置,然后重复第1个步骤重新调节零点,直到给20mA信号后满量程指示正确为止。
II.对于3730系列智能定位器:
转动调节按钮到所需的选项并按下该旋钮后,手形图标和数字同时闪烁,此时可旋转按钮调节数值,选定好后再次按下该旋钮,仅手形图标闪烁则已确定保存。
( 假设本次初始化的定位器配15mm行程的执行器),初始化方法如下:
1.序号3→YES
2.序号36→STD
3.序号3→YES (再次确认下是否仍然是YES)
4.序号4→35mm(旋臂位置:15mm行程为35;30mm行程为50,另有25和90的选项)
5.序号5→15mm (对应执行器的行程)
6.序号6→NOM
7.等待14秒后按下初始化按钮即可。
精品资料欢迎下载。
Samson定位器简介

当输入控制信号变化或有阀位偏差,则对气动执行机构加压 或泄压。若需要,可调整输出气量改善信号压力作用,还可 由软件设置输出信号压力限制值1.4、2.4、3.7巴。
装配到角行程气动执行机构(VDI/VDE 3845) 24 至 100O 开启角
在已初始化的行程/旋转角度:最大可调比为1:5
Байду номын сангаас总线连接
现场总线接口物理层 现场设备按照
IEC 61158-2,总线供电 113(没有防爆保护) 111(防爆保护型) FM3610实体,FISCO和FNICO
通信
现场总线
数据传输符合FOUNDATIONTM现场总线规范, 通信文件级别:31PS、32L; 互用性测试按互用性系统IST版本4.6
所需软件(本机)
SAMSON SSP接口和串行接口适配器 TROVIS-VIEW带3730-5数据库模块
允许工作电压
9 至 32 VDC · 通过总线供电 防爆型按EC检定证书中的限值。
最大工作电流
15mA
出错时的附加电流
0mA
气源
气源 空气质量
1.4 至 7 巴(20至105psi) 按ISO 8573-1(2001):最大颗粒尺寸和密度:4级 · 含油量:3级 露点:3级或必须低于预期的最低环境温度10K
– 集成的电磁阀 – 集成的增强版EXPERT+自诊断(T 8388 ZH) – 不锈钢外壳
相关产品信息表
T 8350 ZH
2008 年 8 月版
数据表
T 8384-5 ZH
SAMSON气动阀门定位器3730

图1 • 4763型电气阀门定位器
安装与操作说明 EB 8359-2 ZH
2004 年9月版
目录
目录
页
1
结构和工作原理
6
2
装配到控制阀
8
2.1 装配到铸造支架的控制阀
8
2.2 装配到杆型支架的控制阀
9
2.3 阀门定位器盖
9
3
连接
10
3.1 电气连接
EB 8355-2 ZH 11
操作
4 操作 4.1 阀门定位器和执行器的组合 图7到图10为气动执行器、输入控制信号、作用方向和安装位置的布置。 若以后有所改变,如:改变控制回路作用方向;或在现场改变气动执行器动 作方式,从“气动执行器杆伸出”改变为“气动执行器杆缩回”型式或相反 改变,都涉及改变阀门定位器的装配位置。
输出压力Pst 特性
滞后 灵敏度 作用方向 1.4巴气源时的 比例(增益)Xp 稳态时耗气量 (Xp=1%) 供气量 “杆伸出”3271型执 行器响应时间 允许环境温度
影响
防护等级 重量 材料
4 至 20 mA 非防爆 在20℃时的内阻Ri:约250Ω±7% 0 至 20 mA 对于EEx ia II C 防爆型,数据参见认证证书
镀铬或喷塑的不锈钢
注:巴(bar)-德国使用的压力单位,1巴=100kPa=0.1MPa
EB 8359-2 ZH 5
结构和工作原理
1 结构和工作原理 4763型电气阀门定位器用于控制阀的准确定位,使其阀行程对应于控制信号。 为此,阀门定位器接受控制系统(控制器)输出的控制信号,作为给定值(w) 与与反馈来的控制阀行程(x)相比较,进而输出一个气动压力信号(输出y) 传送到控制阀的气动执行器。 4763型电气阀门定位器主要由电气(i/p)转换器(21)、包括反馈杆(1)和 轴(1.1)及范围弹簧(6)的机械部分、以及由喷嘴/挡板和气动放大器组成 的气动控制部分。 输入控制信号(例如4到20mA)直接进入电气(i/p)转换器并按比例转换成一 个送到气动控制部分的压力信号Pe。被控制的阀位通过反馈杆(1)使范围弹 簧(6)产生反馈力。与输入控制信号成正比的压力信号Pe作用在测量比较膜 片(8)的有效面积上,产生的给定力直接与阀位传递给范围弹簧(6)的反 馈力进行比较。测量比较膜片(8)由膜片连杆(9)与范围弹簧(6)直接相 连,膜片连杆上的拨杆(9.1)可带动挡板(10.2)位移,并使喷嘴(10.1) 的背压发生变化。 输入控制信号/压力信号Pe的变化或阀杆位置的变化将使给定力与反馈力比 较后有一个偏差,导致连杆位移,拨杆带动挡板位移,离开或靠近喷嘴使其 背压变化。喷嘴背压引入气动放大器(12),经放大输出Pst信号压力给气动 执行器,最终使阀位定位于控制信号的对应值,系统到达新的平衡。 通过气量调整Q(14)和比例(增益)Xp(3)的设置可优化阀门定位器的控制。 对于不同的阀门行程和输入控制信号,可更换相应的范围弹簧(6)。
萨姆森 SAMSON 定位器 3766

1.4...6巴(20...90psi) 最大颗粒和密度:4级·含油量:3级
露点:3级或低于当地环境温度10K
输出信号压力pst
0...约2.5巴与0...6巴(0...约35与0...90psi)之间可限制
流量特性
线性 最终偏差≤1%
滞后
≤0.3%
灵敏度
≤0.1%
作用方向
可逆
比例/增益Xp
0.5...2.5%(增益Kp:>200...40)
过载
最大
0.2...1巴(3...15psi) 0.4...0.8(6...12 psi)
2巴(29psi)
输入控制信号W 3767型
信号范围 量程
4(0)...20mA 8...20mA
二线制,反向保护
1...5mA 2...4mA
20℃时电阻R
200Ω
880Ω
气源
气源范围 空气质量标准按IEC 8573-1(2001-02)
图4 直接装配到 3241-7型控制阀
类型
- 3766型·气动阀门定位器 - 3767型·电气阀门定位器 按选型代码进行详细配置。
图5 装配在3278型 角行程执行器
相关信息表 T 8350 ZH
2006年8月版
数据表
T 8355 ZH
工作原理(图6到图8) 3766型气动阀门定位器(图6)和3767型电气阀门定位器(图7) 都基于力平衡原理,两者唯一的区别是3767型内置了一个i/p 电气转换器(E)。 对于3767型电气阀门定位器,输入的控制信号(i)流经永久磁 铁(E1)磁场中的动圈(E2)并产生与控制信号i成正比的悬 浮力作用在平衡杆(E3)上,克服喷嘴(E6)流出气流在平衡 杆挡板(E7)上的作用力并使喷嘴背压稳定在相应值上,输入 控制电流信号的变化按比例转换为气动控制信号pe送给气动 单元。 气动控制信号pe在测量比较膜片(5)上的作用力与范围弹簧 (4)的力(阀位反馈力)相比较。如果输入控制信号引起气 动控制信号pe变化或阀位引起反馈杆(1)变化,膜片连杆使 杠杆/挡板(3)与喷嘴(2.1或2.2)的间隙发生变化,产生与 偏差相对应的喷嘴背压。可调整气路转换块(7)决定哪个喷 嘴工作即决定阀门定位器正反作用。 气源供给气动放大器(10)和气源压力调整针阀(9),调整 后的气源经比例/增益调整Xp(8)和气路转换块(7)到喷嘴 (2.1 或2.2),从与挡板(3)的间隙流出。控制信号或阀位 反馈杆(1)变化引起挡板与喷嘴间隙变化,使喷嘴背压变化 并传到气动放大器(10),经放大产生输出信号压力pst,再 经输出气量调整(11)传送到气动执行器,使阀位定位在控制 信号要求值。 对于直行程控制阀,阀行程是由连接销钉(1.1)传递给反馈 杆(1)的;对于角行程控制阀(图8),是在反馈杆上加一个 随动轮(20),并随安装在执行器传动轴(21)上的凸轮盘(22) 的转动而位移。最终,反馈杆的线性运动被转换为范围弹簧(4) 的作用力。 若用于双作用执行器,阀门定位器则再装一个反向输出气动放 大器,将输出两个相反的输出信号压力(pst1和pst2)。 可调比例/增益Xp(8)和输出气量调整针阀Q(11)用来优化 定位控制。两个调整螺钉(6.1和6.2)用来调整零点和量程, 也可调整为不同工作模式,如分程控制。
samson 4763型电气阀门定位器 说明书

4763型电气阀门定位器4765型气动阀门定位器应用单作用阀门定位器装配到气动控制阀并辅助实现准确定位,输入控制信号为4(0)至20mA或1至5mA标准电动信号(4763型)或0.2到1巴(3至15psi)的标准气动信号(4765型)。
额定行程7.5至90mm阀门定位器作为气动控制阀的重要附件,接受控制系统或控制器输出的电动或气动控制信号,按预先设置关系辅助气动执行器调整阀位并实现准确定位。
阀门定位器将输入控制信号(给定参数W)和控制阀位反馈信号(被调参数X)进行比较、处理,进而输出相应的气动控制信号pst (输出参数Y)给气动执行器。
特点·结构紧凑,维护量小 ·任意装配位置·不受机械振动影响; ·正反作用可调 ·良好的动态响应特性 ·适用常规或分程控制 ·可调比例/增益 ·可调输出气量; ·耗气低·特殊型可使用氧气气源装配到符合IEC 60534-6标准的控制阀铸造支架或杆型支架上。
可供选择的两只压力表用于监测气源压力和输出信号压力,可选不锈钢外壳和镀镍接头的压力表,或全不锈钢压力表。
4765型气动阀门定位器也可以改变为电气阀门定位器。
类型4763-0型(图1)·电气阀门定位器,用于非防爆区 4763-1型·电气阀门定位器,用于防爆区输入电路为本安 II 2 G EEx ia IIC T6(按照ATEX) 4763-8型·电气阀门定位器,用于EEx nA“无火花”场所 4765/6116型(图3)·电气阀门定位器,带6116型EEx d隔爆电气转换器(图2,认证见数据表T 6116 EN)4765型(图1)·气动阀门定位器,输入控制信号0.2至1巴或3至15psi(注:1巴〔bar〕=100kPa=0.1MPa;psi[磅力/平方英寸]为英美压力单位,1psi=6.89kPa)图3 4765/6116型Ex d隔爆阀门定位器图1 4763型/4765型阀门定位器 图2 6116型电气转换器(壳盖已打开)工作原理4765型气动阀门定位器和4763型电气阀门定位器两者唯一区别是后者内部带电气(i/p)转换器,用于将控制系统或控制器来的电流信号按比例转换成气动控制信号pe。
Samson阀门定位器的原理及应用
此 数字 阀 门定位 器接 收通 过现 场 总线传 送 的 参 考 变 量 (参 考 变 量 w) ,并 将 它 与 控 制 阀 的 行 程 或 旋 转 角 (控 制 变 量 X) 相 比较 。 定 位器发 出一个气 动信号压力 (输出变量 Y)来 使 阀位 与 输 入 对 应 。
1 引言
中海 石 油 建 滔 化 工 有 限 公 司 年 产 60万 吨 甲醇装置 100单元、150单元、300单元 、800 单 元 等 大 量 采 用 了 Samson现 场 总 线 阀 门 定 位 器 , 总 线 定 位 器 在 控 制 和 运 行 方 面 跟 以 前 的 4-20mA 定 位 器 有 较 大 的 区别 , 因 此 掌 握 其 原 理 及 使 用 方 法 是 十 分 必 要 的 。
3 与调 节阀的接合
定 位 器 可 以直 接 和 SAM SON 3277型 执 行 器 接 合 或 与 按 照 IEC 60534—6 (NuMAR) 的 带 铸 铁 框 架 或 柱 形 框 架 的 调 节 阀 接 合 也 可 与 按 照 VDIN DE 3845的旋 转 执 行 器 接 合 。
电子技术 · Electronic Technology
Samson阀 门定位器的原理及应 用
文 /罗运 林
适 。
设 定 输 入 ,使 能 组 态 功 能变 成 非 法 且 显 示 恢 复
Samson现 场 总 线 阀 门 作 原 理 , 与 调 节 阀 的 连接 ,操 作 方 法,故
准状态运行 ,要激活初始化 按钮 以保证定位器
(3)将随 动夹子放 在执行 器杆上 ,调整 最 佳 运 行 。
SAMSON 工业控制阀 定位器 3730-1 操作说明书

输出气量调整 Q(10)用于优化与不同气 动执行器配合的定位控制
紧密关闭功能:
一旦当输入控制信号低于 1%或高于 99% (详见通过参数 P10 和 P11 设置终端阀 位),气动执行器就会立即完全充气或排 空。
8
EB 8384-1 ZH
8
II 3 D IP 65 T 80 °C
外壳材料
标准铝材
0
不锈钢 1.4581
1
特殊类型
无
0
指定漆色涂覆
1
带 ¼ NPT 排气接口
3
特殊类型 无
000
6
EB 8384-1 ZH
技术数据
定位器
行程(可调)Hale Waihona Puke 行程范围 输入控制信号 w 最小电流
直接集成装配到 3227 型执行器:3.6~30mm 根据 IEC60534-6 标准连接:3.6~200 mm,或角行程执行器 24°~100°
EB 8384-1 ZH 5
选型
产品代码
3730-1 型 X 0 0 0 0 0 0 0 0 X 0 0 X 0 0 0
防爆保护
不带
0
根据ATEX指令的 II 2 G EEx ia IIC T6
1
根据FM/CSA指令的 Ex ia/Ex n
3
根据ATEX指令的 II 3 G EEx nA/nL II T6和
代码表…………………………………………………………..38
维护……………………………………………………………..42
防暴设备的维护………………………………………………..42
尺寸 mm ………………………………………………………..43
SAMSON阀门定位器

SAMSON的阀门定位器也跟随着控制技术的发展,经历了由气动、电动、数字、发展到现在的区域总线阀门定位器。
在世界同类产品中,SAMSON 的阀门定位器以它的结构紧凑、耗气量低、工作可靠、定位器中可选附加功能多等优势得到了大家广泛的好评。
为了便于大家讨论,我们首先复习一下定位器中的基本自控元件。
定位器中基本自控元件介绍——电/气转换器原理随着仪表技术的发展,气动仪表领域已逐步被电动仪表和计算机控制所占领,现在只有在一些特殊的场合还在使用气动仪表,作为仪表中的阀门附件“定位器”也由原来的气动阀门(P/P)定位器逐步由电/气(E/P)阀门定位器所代替。
那么在电/气阀门定位器中输入的电信号是如何转换成气信号的呢?我们以SAMSON 6111 型电/气转换器为例介绍一下它的工作原理(见图1):图1 Function Diagram of 6111图1A Type 4763气动功率放大器(8)在设计时;选用合适的弹簧力(8.2),使当输入信号为0 mA 时保持输出PA 在100mbar ,这样输出的压力通过恒节流孔(8.4)使喷嘴(7)内有一定的背压。
当输入的信号增加时;通电的线圈(2)切割永久磁铁(3)的磁力线,产生向上的力→挡板(6)靠近喷嘴(7)使背压(PK)增加→膜片(8.3)↓→打开阀芯(8.5)→输出PA↑。
当输入信号减少时;挡板(6)离开喷嘴(7)→背压(PK)减少→输出压力(PA)作用下膜片(8.3)↑→阀芯(8.5)关死→输出压力通过阀芯(8.5)释放。
当PA 同PK 平衡时输出压力保持不变;这时电信号在线圈(2)中产生的力也同背压(PK)取得平衡。
这样输入的电信号就转换成气信号了。
定位器的组成以SAMSON 的4763 电/气阀门定位器(图1A)为例,定位器主要组成部分见图2。
图2 1.反馈杆(1)2.反馈弹簧(6)3.反馈风箱(7)4. 气动功率放大器(7下部)5. 电/气转换器(21)定位器工作原理1. 模拟定位器我们还是以SAMSON的4763定位器为例(参考图3)。
SAMSON智能定位器自整定步骤
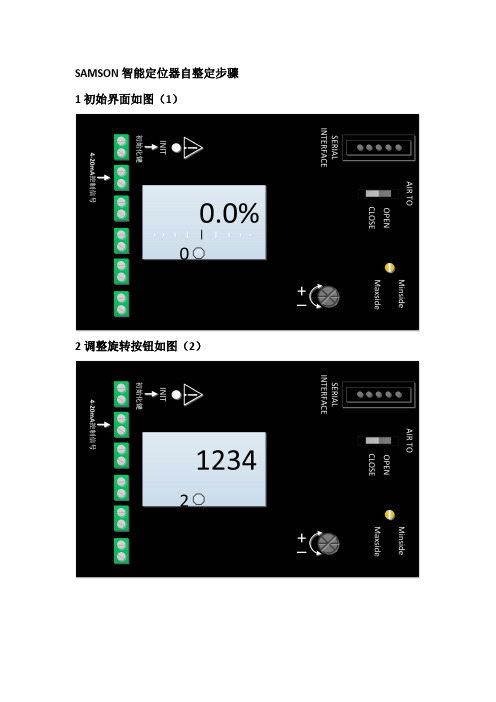
SAMSON智能定位器自整定步骤1初始界面如图(1)
2调整旋转按钮如图(2)
3调整旋转按钮至3选项如图(3)
按下旋钮后,旋转旋钮将NO改为YES后按下旋转按钮
4调整旋钮至图(4){销钉安装位置}
5调整旋钮至图(5){阀的公称行程}
6调整旋钮至图(6)
按下旋转按钮后,旋转按钮将NOM改为MAX,按住按钮确认
完成以上步骤后,用小螺丝刀捅入INIT圆孔内自整定开始
整定画面在TUNE和MAX中双向切换
整定结束后,显示屏画面出现WAIT如图
然后跳转到TEST,整定结束
另外通过第20项可选择特性,在广东石化所使用的SAMSON定位器中角行程普遍选择5选项即旋转阀芯阀线性,所对应的阀位显示为4mA-0%,8mA-35.6%,12mA-56.5%,16mA-75.4%,20mA-100%
具体特性数字为
0线性1等百分数2可逆等百分数3蝶阀线性4蝶阀等百分数
5旋转阀芯阀线性6旋转阀芯阀等百分数7部分球阀线性
8部分球阀等百分数9用户自定义
当定位器的屏幕上出现S字符时,需用通过第36项进行出厂设置旋转按钮调至36项后,找到std项,按住按钮即可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SAMSON的阀门定位器也跟随着控制技术的发展,经历了由气动、电动、数字、发展到现在的区域总线阀门定位器。
在世界同类产品中,SAMSON 的阀门定位器以它的结构紧凑、耗气量低、工作可靠、定位器中可选附加功能多等优势得到了大家广泛的好评。
为了便于大家讨论,我们首先复习一下定位器中的基本自控元件。
定位器中基本自控元件介绍——电/气转换器原理
随着仪表技术的发展,气动仪表领域已逐步被电动仪表和计算机控制所占领,现在只有在一些特殊的场合还在使用气动仪表,作为仪表中的阀门附件“定位器”也由原来的气动阀门(P/P)定位器逐步由电/气(E/P)阀门定位器所代替。
那么在电/气阀门定位器中输入的电信号是如何转换成气信号的呢?我们以SAMSON 6111 型电/气转换器为例介绍一下它的工作原理(见图1):
图1 Function Diagram of 6111
图1A Type 4763
气动功率放大器(8)在设计时;选用合适的弹簧力(8.2),使当输入信号为0 mA 时保持输出PA 在100mbar ,这样输出的压力通过恒节流孔(8.4)使喷嘴(7)内有一定的背压。
当输入的信号增加时;通电的线圈(2)切割永久磁铁(3)的磁力线,产生向上的力→挡板(6)靠近喷嘴(7)使背压(PK)增加→膜片(8.3)↓→打开阀芯(8.5)→输出PA↑。
当输入信号减少时;挡板(6)离开喷嘴(7)→背压(PK)减少→输出压力(PA)作用下膜片(8.3)↑→阀芯(8.5)关死→输出压力通过阀芯(8.5)释放。
当PA 同PK 平衡时输出压力保持不变;这时电信号在线圈(2)中产生的力也同背压(PK)取得平衡。
这样输入的电信号就转换成气信号了。
定位器的组成
以SAMSON 的4763 电/气阀门定位器(图1A)为例,定位器主要组成部分见图2。
图2 1.反馈杆(1)
2.反馈弹簧(6)
3.反馈风箱(7)
4. 气动功率放大器(7下部)
5. 电/气转换器(21)
定位器工作原理
1. 模拟定位器我们还是以SAMSON的4763定位器为例(参考图3)。
我们设:调节阀为FC(气开);定位器为正作用
图3
A)阀位根据输入信号成比例动作
输入信号↑→Pe 点气压↑→反馈风箱中连杆(9)向左动作→压紧弹簧(6),挡板(10.2)靠近喷嘴(10.1)→输出风压↑→阀杆(对于气开阀)↑→压紧弹簧(6)→反馈风箱中连杆(9)向右动作→挡板(10.2)离开喷嘴(10.1)→输出气压(Pst)↓。
当反馈弹簧的力与反馈风箱的力平衡时,阀位保持与输入信号对应的位置。
B)定位
当输入信号不变时:由于工艺条件变化导致阀杆↑→压紧执行器弹簧→压紧弹簧(6)→反馈风箱中连杆(9)向右动作→挡板(10.2)离开喷嘴(10.1)→输出气压↓→由执行器向下的弹簧力使阀位回到原来的地方。
由于工艺条件变化导致阀杆↓→放松执行器弹簧→放松弹簧(6)→反馈风箱中连杆(9)向左动作→挡板(10.2)靠近喷嘴(10.1)→输出气压↑→使执行器向上运动使阀位回到原来的地方。
2.数字阀门定位器
数字阀门定位器与模拟阀门定位器的主要区别是:偏差计算、反馈信号处理、输入/输出信号处理等采用了数字集成电路和微处理器进行处理。
以SAMSON TYPE 3780为例,参考图4和图5:
图4 3780 Positinoer
图5 Function Diagram of 3780
定位器的输入模拟信号经A/D转换后至微处理器(2);阀门的变化信号经过位置感应传感器(5)和A/D转换也同时到达微处理器。
微处理器根据输入信号和阀位信号的偏差经过计算和输出控制信号使供气电磁阀3和排气电磁阀4工作,使阀位与输入信号相对应。
通信用的HART信号是经过解调器(1)后至微处理器。
3.HART 定位器
HART定位器同模拟定位器的主要区别是:
1)定位器在接收4~20mA 模拟信号的同时,还可接收到在4~20mA 模拟信号上叠加的一个带有HART 传输协议的交流信号。
2)模拟的4~20mA 信号用于控制阀位,定位器可以用模拟信号发生器进行阀位调校。
3)HART 信号主要用于定位器的设定和组态以及阀门的故障诊断(取决于定位器功能)。
4.PROFIBUS 和Fieldbus 定位器
主要特点是:
1)信号的传输是通过PROFIBUS 或Fieldbus 协议的区域总线进行的。
2)定位器不能直接接受4~20mA 的模拟信号。
3)定位器中含有符合相关协议的输入,输出及PID 控制模块。
4)检查和调校定位器;必须用能与定位器进行通讯和含有应用软件的设备进行。
定位器的基本功能
1. 比例动作和定位作用
比例动作:根据输入的信号,使阀门的阀位与输入信号相对应。
定位作用:当输入信号固定时,阀位不受工艺条件的变化而变化。
2. 功率放大
针对气动输入信号而言,定位器可将输入的气信号;通过定位器中的气动功率放大器进行放大,使微小的信号就可以控制阀门动作。
3. 提高阀门的控制精度
由于定位器是根据输入信号与阀门位置的偏差对输出信号进行调整的,一旦输入信号与阀门位置有偏差,定位器将自动调整输出信号以改变阀位,直到阀位与输入信号相对应为止,这样大大提高了阀门的控制精度。
4. 克服摩擦力
由于定位器本身的定位闭环控制,当摩擦力变化时(指阀杆的填料、执行器的密封等部分的摩擦力);定位器可以根据由摩擦力造成的位置偏差,自动增加或减少输出到执行器的压力,以克服摩擦力对阀门开度造成的影响。
5. 改变作用方式
通过定位器我们可以改变阀门的作用方式。
根据阀门的作用方式我们可按表1来设定定位器的正、反作用。
6.改变阀门特性曲线
阀门的流量特性,除了在阀门制造时通过改变阀芯/座的形状来实现外;我们还可以在定位器中,通过改变反馈量(模拟定位器)和设定参数(数字定位器)来改变阀门的流量特性。
SAMSON 定位器中只有数字定位器(3730-2/3,3780,3785,3787)和在角行程应用时的3767模拟定位器;可以通过定位器改变阀门的流量特性。
用定位器改变阀门流量特性的实质是:通过改变定位器输入信号和阀位的关系来改变阀门的开度,实现不同的阀门流量特性。
我们通过表2看一下通过阀芯形状实现等百分比特性和通过定位器实现等百分比特性有何不同呢?
从表2我们可以发现:当利用阀芯形状改变调节阀的流量特性时,无论线性和等百分比特性的阀门,它们的开度(行程指示牌)同输入的信号是相对应的。
(但实际阀门内部的开度是不同的)而通过定位器实现等百分比特性的阀门开度;相对线性特性而言,其输入信号同阀位的关系有明显的不同,而且它们关系与阀门的结构和类型以及阀门固有的流量特性有关。
如果阀门的固有流量特性是线性特性,我们就可以利用定位器很方便地改变它们的特性,反之我们要慎重行事。
7.信号转换/分程控制
我们可以通过定位器实现电/气转换,也可以利用定位器来实现阀门的分程控制。
8. 阀门故障诊断(数字定位器)
在数字定位器中,我们可以利用定位器实现对阀门的故障进行诊断。
9. 整合其它功能(回讯开关,电磁阀,位置变送器等)
利用定位器我们可以将:回讯开关,电磁阀,位置变送器等整合在一起,这样可使阀门的附件之间的连接更加紧凑和可靠,同时也可提高定位器的性能价格比。
定位器分类
SAMSON 阀门定位器有多种类型和功能,我们按主要类型归纳如下:
1.气动阀门定位器
气动阀门定位器有:Type 3760,4765,3766,3761。
2.电/气阀门定位器
模拟定位器有:Type 3730-1,3760,3761,3766,4763;数字定位器有:Type 3730-2,3730-3(HART),3780(HART),3785(PROFIBUS),3787(Fieldbus)。
3.电动阀门定位器
模拟电动阀门定位器:已经整合在3274,5824 等电动执行器中。
结束语
由于定位器在阀门使用中起着举足轻重的作用,如何在实际应用中选用好定位器,对阀门的性能价格比,过程控制的稳定性有很大关系,我们只有充分理解和了解定位器,才能充分发挥它的作用。
【返回】【关闭】【打印】【发送】相关文章
■ 发表评论
第一页|上一页|下一页|尾页
用户名:匿名发出:
留言:
PROCESS《流程工业》杂志社© 版权所有
Copyri ght © 2002 Vogel, All Rights Reserved
地址:北京市西城区白云路1号11层邮编 100045
电话:0086/10/63326090 Email:*******************.cn
Warning: mysql_num_rows(): supplied argument is not a valid MySQL result resource in /home/vcc_web/process/authMM/sess_mysql.php on line 56。