ov7725模块电路图
图解Windows 10平板电脑电路原理和维修

15 Windows 10二合一平板电脑电路分析
15.1 Windows 10二合一平板电脑硬 件组成
15.2 Windows 10二合一平板电脑架 构组成
15.3 Windows 10平板电脑的电源电 路
15.4 Windows 10平板电脑中的EC电 路和上电时序分析
15.5 Windows 10平板电脑CPU电路
4.2 CPU挂接/连 接的外部模块
4.3 CPU引脚信号 的说明
4.4 CPU的工作过 程
4.5 CPU电路的检 修
05
Part One
5 平板电脑的存储电路
5 平板电脑的存储电路
A
C
5.2 闪存 NAND电路
5.1 内存DDR 电路
5.3 串行闪存 电路
B
5.4 SSD固态 硬盘电路
D
01 5.1.1 DDR内存控
15.4.1 Windows 10平板电脑中的 EC电路
15.4.2 英特尔6、7、8、9系列芯 片组上电时序及信号解释
15 Windows 10二合一平板电脑电路分析
15.4 Windows 10平板电脑中的EC电路和上电时序分析
15 Windows 10二合一平板电脑电路分析
15.5.1 CPU供 电电路
制器
02 5.1.2 DDR内存的
内部结构
03 5.1.3 DDR电路连
接图
04
5.1.4 DDR芯片各 引脚符号说明及引
脚作用
05 5.1.5 DDR电路的
工作原理
5 平板电脑的存储电路
5.1 内存DDR电路
06 5.1.6 内存DDR电
路的检修
5.2.1 闪存控制器
CMOS-Sensor的调试经验分享

CMOS-Sensor的调试经验分享CMOS Sensor的调试经验分享我这里要介绍的就是CMOS摄像头的一些调试经验。
首先,要认识CMOS摄像头的结构。
我们通常拿到的是集成封装好的模组,一般由三个部分组成:镜头、感应器和图像信号处理器构成。
一般情况下,集成好的模组我们只看到外面的镜头、接口和封装壳,这种一般是固定焦距的。
有些厂商只提供芯片,需要自己安装镜头,镜头要选择合适大小的镜头,如果没有夜视要求的话,最好选择带有红外滤光的镜头,因为一般的sensor都能感应到红外光线,如果不滤掉,会对图像色彩产生影响,另外要注意在PCB设计时要保证镜头的聚焦中心点要设计在sensor的感光矩阵中心上。
除了这点CMOS Sensor硬件上就和普通的IC差不多了,注意不要弄脏或者磨花表面的玻璃。
其次,CMOS模组输出信号可以是模拟信号输出和数字信号输出。
模拟信号一般是电视信号输出,PAL和NTSC都有,直接连到电视看的;数字输出一般会有并行和串行两种形式,由于图像尺寸大小不同,所要传输的数据不同,数据的频率差异也很大,但是串行接口的pixel clock频率都要比并行方式高(同样的数据量下这不难理解),较高的频率对外围电路也有较高的要求;并行方式的频率就会相对低很多,但是它需要更多引脚连线;所以这应该是各有裨益。
(笔者测试使用的系统是8bit并行接口)另外输出信号的格式有很多种,视频输出的主要格式有:RGB、YUV、BAYER PATTERN等。
一般CMOS Sensor 模组会集成ISP在模组内部,其输出格式可以选择,这样可以根据自己使用的芯片的接口做出较适合自己系统的选择。
其中,部分sensor为了降低成本或者技术问题,sensor部分不带ISP或者功能很简单,输出的是BAYER PATTERN,这种格式是sensor的原始图像,因此需要后期做处理,这需要有专门的图像处理器或者连接的通用处理器有较强的运算能力(需要运行图像处理算法)。
CMOS摄像头视频采集控制器共4页

CMOS摄像头视频采集控制器The Sdram Controller Based of FPGAHUI Wei-jun(Yan Cheng institute of technology, Yancheng 224051,China)Abstract: The principle 、configuration registers and SCCB time sequence are introduced in this paper. Based on this,the design of OV7725 controller based on FPGA is realized, the code structure of the design is given as well as. Design code is completed and downloaded on QUARTUSII13.0 platform. The results shows that the design is successful.OV7725是豪威的一款CMOS摄像头,具有成本低、灵敏度高等特点,在视频图像采集系统中,得到广泛应用。
目前,各种CMOS摄像头虽然感光效果等有所差异,但是其开发流程差不多,就是通过对摄像头寄存器的配置,使摄像头按照配置参数要求采集视频图像。
OV7725一共有172个寄存器,用于工作模式的配置。
由于寄存器众多,配置参数需要通过SCCB总线传输。
因此,有必要设计控制器实现OV7725的参数配置。
1 OV7725功能通过SCCB协议,对OV7725配置。
然后,在时钟驱动下,感光元件对图像进行采样,采样信号在12bit的A/D转换后,通过DSP进行相关图像处理,输出符合配置要求的10bit视频数据。
2 OV7725配置寄存器OV7725的配置寄存器有172个。
在传感器正常工作之前,这些寄存器必须进行配置,否则,不能得到预期画质的图像。
基于图像识别的智能小车系统设计
第1章绪论1.1课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作。
2)摄像机,用来获得道路图像信息。
3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆作为移动机器人的一个重要分支正得到越来越多的关注。
1.2国内外发展现状及趋势智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制其速度,而智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
国外智能车辆的研究历史较长。
它的发展历程大体可以分成三个阶段:第一阶段20世纪50年代是智能车辆研究的初始阶段。
1954年美国Barrett Electronics公司研究开发了世界上第一台自主引导车系统AGVS (Automated Guided Vehicle System)。
一种矿工智能帽的设计及实现

一种矿工智能帽的设计及实现作者:陈彩明谢承玲刘洪林刘堂宇来源:《现代电子技术》2013年第08期摘要:将传统矿工帽集成为井下个人安全的一个移动管理平台,可最大限度地保护矿工的安全。
采用MTK6235手机平台实现了传统矿工帽具备瓦斯浓度、温湿度的实时监测与报警,并通过广角夜视摄像头和VOIP通信实现了对矿工井下作业的视频监测和对讲指挥功能。
该系统可与井上综合信息应用管理系统轻松对接,实现了对矿工安全综合系统的智能化。
关键词:智能矿工帽;移动管理平台;瓦斯浓度浓度监测; VOIP通信中图分类号: TN919⁃34; TP302 文献标识码: A 文章编号: 1004⁃373X(2013)08⁃0084⁃02由于煤矿安全事故的屡次发生,国家越来越重视对井下安全监测和管理,在井下安装了大量的针对甲烷、一氧化碳等气体的监测监控管理系统[1⁃2],特别是目前针对矿山开采领域所推行综合信息应用管理系统,全面推进煤矿等危险矿山行业管理信息化、生产自动化、安全管理实时、远程化,这些对保证矿山安全生产和矿工的生命安全都有着十分重要的作用,也是煤炭高产、高效的重要保证。
随着电子技术和无线通信技术的发展,以往只能固定使用相关监控设备可以升级到无线便携式的应用模式[3],为矿山井下的安全监测应用提供了一个新的设计方案,本文中针对矿山工人的矿工帽做了全新设计,使之不再是只用来照明、保护头部安全的工具,而是有多种监测功能、拍照功能、VOIP对讲功能的个人安全综合系统。
1 矿工智能帽的实现原理目前矿工帽主要作用是在于照明和安全防护,考虑到矿工帽作为井下作业的必备防护工具,可考虑在矿工帽上增加一些新功能特性,比如有毒气体的安全监测、工作环境温/湿度测试、以及现场工作环境图像的监测等[4⁃6],这些功能可以集成在矿工帽上,与矿工灯一起附在矿工帽上,随着矿工在井下的活动范围变化,从而实时快速把相关信息传送到井上监控中心。
由于矿工在井下的活动空间不是完全固定,所以采用传统控制设计模式显然存在比较大问题,比如系统只能采用电池供电,对于设备的电源功耗进行管理,需要一个智能电源管理系统,如果采用无线信息传输,一般都是采用ISM频段的WiFi,ZigBee等无线技术[7⁃8],传统设计方法是搭积木一样的增加相关模块设计方案。
基于数字图像的煤岩辨识系统综述
基于数字图像的煤岩辨识系统综述摘要:在煤矿开采过程中,为将煤与矸石区分开来,提出了以人工智能、模式识别为理论基础,以数字图像处理为关键技术,并引用傅里叶变换作为图像处理的核心算法,以ARM主控板为开发平台的煤岩辨识系统。
该系统以CMOS摄像头采集煤矿开采过程中的图像,通过对图像的分析,来确定采煤机滚筒的路径。
关键词:煤岩辨识数字图像处理ARM 傅立叶变换Abstract:In the coal mining process, a new coal and rock recongnition system is proposed to distinguish between coal and rock, based on the principle of artificial intelligence and pattern recognition as the theoretical foundation. Fourier transform are described as the digital image processing key technique. The suggested coal and rock recongnition system is realized in the smart ARM development platform. Finally,determining the path of the drum shearer is through the analysis of image which captured by CMOS cameras in the mining process.Key words:coal and rock recongnition;digital image processing;ARM;Fourier transform煤炭是中国的主要能源之一。
基于改进PERCLOS的疲劳驾驶检测系统的设计
现代电子技术Modern Electronics TechniqueNov. 2023Vol. 46 No. 222023年11月15日第46卷第22期0 引 言随着汽车保有量和路网密度的快速增加,交通事故频发,造成很多人员伤亡和财产损失[1]。
疲劳驾驶已经成为影响交通事故不可忽视的隐式因素,因其造成的交通事故数量约占中体事故数量[2]的10%~20%。
对驾驶员进行疲劳驾驶检测、提醒,能够有效地降低因疲劳驾驶引发的交通事故。
随着边缘设备算力的提升以及硬件成本的下降,主流的疲劳驾驶检测系统大部分采用的是基于深度学习的检测算法,但是这些算法计算开销较大,导致出现功耗较高、检测速度低等缺点,同时单一的检测指标也容易出现漏检的现象。
为了解决以上问题,本文设计一种基于改进PERCLOS 的疲劳驾驶检测系统,对驾驶员眼部特征、握力特征和汽车横向加速度特征进行多信号的监测,从人体生理信号、动作特征以及汽车运动轨迹的融合信息中进行准确的疲劳驾驶判断。
1 系统总体设计整个疲劳驾驶检测系统由车载终端、云服务器和远端监测主机三部分组成,系统结构如图1所示。
车载终端的主控为OpenMV [3],CMOS 摄像头、握力检测电路和加速度计组成驾驶信息感知模块,语音识别电路和DOI :10.16652/j.issn.1004⁃373x.2023.22.008引用格式:许龙铭.基于改进PERCLOS 的疲劳驾驶检测系统的设计[J].现代电子技术,2023,46(22):41⁃45.基于改进PERCLOS 的疲劳驾驶检测系统的设计许龙铭(广州城市理工学院 通信工程学院, 广东 广州 510800)摘 要: 针对疲劳驾驶事件频发、检测难度较高的问题,设计一种基于改进PERCLOS 的疲劳驾驶检测系统。
以搭载CMOS 摄像头的OpenMV 作为主控,实时检测驾驶人的人脸图像,采用基于Haar 特征的Cascade 分类器来分割人眼区域,再从人眼区域内提取瞳孔的颜色深度特征,计算得出人眼开合度,从而判断驾驶员是否在眨眼。
电磁曲射炮控制与弹道分析系统模拟
2021年1月25日第5卷第2期现代信息科技Modern Information TechnologyJan.2021 Vol.5 No.2382021.1收稿日期:2020-12-21电磁曲射炮控制与弹道分析系统模拟梁明智(哈尔滨工业大学(威海) 信息科学与工程学院,山东 威海 264209)摘 要:电磁炮是一种利用电磁能量对弹丸进行加速赋能的武器装置。
相较于常见的火药武器,电磁炮的杀伤性更强,打击范围更广。
该模拟电磁曲射炮装置是以基于ARM Cortex-M4内核的MK66芯片为主处理器,由摄像头模块与激光模块定位后通过激光精准测量目标位置,得到所需的仰角与初速度。
经由DAC 控制继电器通断以控制电容充放电的方式控制电磁炮发射速度,同时运用PID 控制技术控制舵机角度,实现电磁炮装置的精准制导。
关键词:高压电容;自动瞄准;电磁力;摄像头定位;继电器中图分类号:TP368.1文献标识码:A文章编号:2096-4706(2021)02-0038-03A Simulation of Electromagnetic Curving Gun Control and Trajectory Analysis SystemLIANG Mingzhi(School of Information Science and Technology ,Harbin Institute of Technology (Weihai ),Weihai 264209,China )Abstract :Electromagnetic gun is a kind of weapon device that uses electromagnetic energy to accelerate the energy of projectile.Compared to conventional gunpowder weapons ,electromagnetic guns are more lethal and can strike over a wider area. The simulatedelectromagnetic curved gun is based on the MK 66 chip based on ARM Cortex-M 4 core. After positioning by camera module and laser module ,the target position is accurately measured by laser ,and the required elevation and initial speed are obtained. The firing speed of the electromagnetic gun is controlled by the way of capacitor charge and discharge by DAC control relay on and off ,and the steering angle is controlled by the PID control technology to realize the precise guidance of the electromagnetic gun device.Keywords :high voltage capacitor ;automatic aiming ;electromagnetic force ;camera positioning ;relay0 引 言传统武器一般都是利用爆炸产生的巨大压强将弹丸弹出,但爆炸所产生的动能有限,且能量的转化率也相对比较低,因此弹丸的最大击打距离也受到极大的限制,为了突破这一限制,电磁炮应运而生,亟需研究自动控制系统操纵电磁炮的重要性不言而喻[1,2]。
OV7725芯片应用笔记,完整说明,寄存器配置

OV7725 Camera ModuleSoftware Application NoteLast Modified: Dec 12th , 2007Document Revision: 1.04OmniVision Technologies, Inc. reserves the right to make changes without further notice to any product herein to improve reliability, function or design. OmniVision does not assume any liability arising out of the application or use of any project, circuit described herein; neither does it convey any license under its patent nor the right of others.Sensor datasheet is the official document of OmniVision. Software/hardware/dual camera applicaton notes are application guide lines for reference. If there are any difference between sensor datasheet and application notes, please follow sensor datasheet and kindly report the difference to OVT FAE.This document contains information of a proprietary nature. None of this information shall be divulged to persons other than OmniVision Technologies, Inc. employee authorized by the nature of their duties to receive such information, or individuals or organizations authorized by OmniVision Technologies, Inc.OV TCo n fi de n t i al Fo r S u nn yTable of ContentsOV7725 Camera Module.....................................................................................................................1Software Application Note...................................................................................................................11. Select Output format....................................................................................................................41.1 Backend with full ISP...........................................................................................................41.2 Backend with YCbCr ISP.....................................................................................................51.3 Backend without ISP.............................................................................................................51.4 Equations to Convert from One Format to Another.............................................................52. Select Output Resolution.............................................................................................................62.1 Backend with ISP..................................................................................................................62.2 Backend without ISP.............................................................................................................63. Adjust frame rate.........................................................................................................................63.1 Frame Rate Adjustment for 24Mhz input clock....................................................................630 fps, PCLK = 24Mhz..........................................................................................................615 fps, PCLK = 12Mhz..........................................................................................................725fps, PCLK = 24Mhz...........................................................................................................714.3fps, PCLK = 12Mhz........................................................................................................73.2 Frame Rate Adjustment for 26 Mhz input clock...................................................................730 fps, PCLK = 26Mhz..........................................................................................................715 fps, PCLK = 13Mhz..........................................................................................................825fps, PCLK = 26Mhz...........................................................................................................814.3fps, PCLK = 13Mhz........................................................................................................83.3 Frame rate adjustment for 13 Mhz input clock.....................................................................930 fps, PCLK = 26Mhz..........................................................................................................915 fps, PCLK = 13Mhz..........................................................................................................925fps, PCLK = 26Mhz...........................................................................................................914.3fps, PCLK = 13Mhz........................................................................................................94. Night Mode................................................................................................................................104.1 Night Mode with Fixed Frame Rate...................................................................................10For 24Mhz/26Mhz Clock Input............................................................................................10For 13Mhz Clock Input........................................................................................................104.2 Night Mode with Auto Frame Rate.....................................................................................10For 24Mhz/26Mhz Clock Input............................................................................................10For 13Mhz Clock Input........................................................................................................115. Remove Light Band...................................................................................................................125.1 Light Band...........................................................................................................................125.2 Remove Light band.............................................................................................................125.3 Select Banding Filter by Region Information.....................................................................12Banding Filter Setting for 24Mhz Input Clock....................................................................135.4 When Light Band can not be Removed..............................................................................146. White Balance............................................................................................................................146.1 Simple White Balance.........................................................................................................146.2 Advanced White Balance....................................................................................................146.3 How to select?.....................................................................................................................157. Defect Pixel Correction.............................................................................................................15OV TCo n fi de n t i al Fo r S u nn y8. BLC............................................................................................................................................159. Video Mode...............................................................................................................................1510. Digital zoom............................................................................................................................1611. OV7725 Functions...................................................................................................................1611.1 Light Mode........................................................................................................................1611.2 Color Saturation................................................................................................................1711.3 Brightness..........................................................................................................................1811.4 Contrast.............................................................................................................................1911.5 Special effects...................................................................................................................2012. Deal with Lens.........................................................................................................................2112.1 Light fall off......................................................................................................................2112.2 Dark corner.......................................................................................................................2112.3 Resolution.........................................................................................................................2112.4 Optical contrast.................................................................................................................2112.5 Lens Cover........................................................................................................................2212.6 Lens Correction.................................................................................................................2213. Reference Settings...................................................................................................................2213.1 YCbCr...............................................................................................................................2213.2 RGB raw...........................................................................................................................2413.3 RGB565. (24)OV TCo n fi de n t i al Fo r S u nn y1. Select Output formatOV7725 support 4 output formats: YCbCr, RGB565/RGB555, Bayer raw RGB and Processed raw RGB. How to choose the right output format for camera phone design or other applications? Let's look at the backend chip first.The general diagram of backend chip is as below:The data format at LCD driver are always RGB. For example, RGB444, RGB565, RGB555,RGB888 etc. The data format and memory interface are always Compressed. The Compression data is compressed from YCbCr data. So Both RGB and YCbCr data are needed inside the backend chip. The “X” block is different for different backend chips.1.1 Backend with full ISPThis kind of backend has full ISP. It takes raw RGB input, doing interpolation to generateRGB24 and doing translation to generate YCbCr. This kind of backend could take either Bayer raw RGB or processed raw RGB.The advantage of processed raw RGB over Bayer raw RGB is the output data are processed. Sensor functions such as defect pixel correction, lens correction, gamma, color matrix, de-noise, sharpness, BLC etc. could be applied. Since the life time of backend chip is longer than imagesensor, sometimes backend chips could not fix defects of new sensors if taken Bayer raw RGB. But the defects of new sensors could be fixed in processed raw RGB output.If backend take Bayer raw RGB format from sensor, all the image process operations such as defect pixel correction, lens correction, gamma, color matrix, de-noise, sharpness, BCL etc should be done by backend. If backend take processed raw RGB format from sensor, the image process operations such as defect pixel correction, lens correction, gamma, color matrix, de-noise,OV TCo n fi de n tsharpness, BCL etc could be done either inside sensor or by backend chips. In other words, user could select the image process operation be done by which side.1.2 Backend with YCbCr ISPThis kind of backend has ISP, but could take only YCbCr format. The ISP could convert YCbCr to RGB format for LCD display and compress YCbCr for storage.1.3 Backend without ISPThis kind of backend doesn't have ISP built-in. It can not convert from one format to another by hardware. Actually the format conversion is done by software. There are 3 possible solution for this kind of backend chips.a. Sensor output YCbCr. Backend convert YCbCr to RGB for display by software.b. Sensor output RGB565. Backend convert RGB565 to YCbCR for compression.c. Sensor output RGB565 for preview, output YCbCr for capture ( compression).Solution a. provide the best picture quality. Since the input data is 24-bit RGB equivalent. It could converted to RGB888 for LCD display. Solution b. provide the worst picture quality. Since the input data is only 16-bit RGB565, even it is converted to YCbCr, the color depth is still 16-bit. The solution c. provide similar picture quality as solution a. But since preview is RGB565, capture is YCbCr, preview picture may looks a little different than capture picture.1.4 Equations to Convert from One Format to AnotherYCbCr to RGB24Y = 0.299R + 0.587G + 0.114BCb = 0.568(B-Y) + 128 = –0.172R – 0.339G + 0.511B + 128Cr = 0.713(R-Y) + 128 = 0.511R – 0.428G – 0.083B + 128Y = ((77 * R + 150 * G + 29 * B) >> 8);Cb = ((-43 * R - 85 * G + 128 * B) >> 8) + 128;Cr = ((128 * R - 107 * G - 21 * B) >> 8) + 128;RGB24 to YCbCrR = Y + 1.371(Cr – 128)G = Y – 0.698(Cr – 128) – 0.336(Cb – 128)B = Y + 1.732(Cb – 128)OV TCo n fi de n t i al Fo r S u nn yR = Y + (351*(Cr – 128)) >> 8G = Y – (179*(Cr – 128) + 86*(Cb – 128))>>8B = Y + (443*(Cb – 128)) >> 82. Select Output Resolution 2.1 Backend with ISPIf Backend chip has built-in ISP (Full ISP or YCbCr ISP), the ISP could do image scale. So OV7725 outputs only VGA format. ISP scaled VGA image to other resolution that mobile device needed.2.2 Backend without ISPIf backend chip doesn't have image scale capability, then the LCD scaler of OV7725 must be used to scale output resolution exactly the LCD size. For example, if the LCD size is 176x220, then the LCD scaler will scale the output size to 176x220.3. Adjust frame rateThe recommended frame rates are 30fps and 15fps for 60Hz light environment, 25fps and 14.3fps for 50Hz light environment. The frame rate for night mode is lower, we'll discuss night mode later.Reference settings for above frame rates are listed below.3.1 Frame Rate Adjustment for 24Mhz input clock30 fps, PCLK = 24MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x01);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);write_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x00);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);OV TCo n fi de n t i al Fo r S u nn y15 fps, PCLK = 12MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x03);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);write_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x00);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);25fps, PCLK = 24MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x01);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);write_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x66);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);14.3fps, PCLK = 12MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x03);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);write_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x1a);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);3.2 Frame Rate Adjustment for 26 Mhz input clock30 fps, PCLK = 26MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x01);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);OV TCo n fi de n t i al Fo r S u nn ywrite_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x2b);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);15 fps, PCLK = 13MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x03);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);write_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x2b);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);25fps, PCLK = 26MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x01);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);write_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x99);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);14.3fps, PCLK = 13MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x03);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);write_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x46);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);OV TCo n fi de n t i al Fo r S u nn y3.3 Frame rate adjustment for 13 Mhz input clock30 fps, PCLK = 26MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x00);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);write_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x2b);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);15 fps, PCLK = 13MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x01);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);write_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x2b);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);25fps, PCLK = 26MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x00);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);write_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x99);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);14.3fps, PCLK = 13MhzSCCB_salve_Address = 0x42;write_SCCB(0x11, 0x01);write_SCCB(0x0d, 0x41);write_SCCB(0x2a, 0x00);OV TCo n fi de n t i al Fo r S u nn ywrite_SCCB(0x2b, 0x00);write_SCCB(0x33, 0x46);write_SCCB(0x34, 0x00);write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);write_SCCB(0x0e, 0x65);4. Night ModeThere are 2 types of settings for night mode. One type is set to fixed low frame rate, for example 3.75fps. The other type is set to auto frame rate, for example from 30fps to 3.75fps. Whenenvironment is bright, the frame rate is increased to 30fps. When environment is dark, the frame rate is decreased to 3.65fps.4.1 Night Mode with Fixed Frame RateFor 24Mhz/26Mhz Clock Input3.75fps night mode for 60Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x0f);write_SCCB(0x0e, 0x65);3.125fps night mode for 50Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x0f);write_SCCB(0x0e, 0x65);For 13Mhz Clock Input3.75fps night mode for 60Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x07);write_SCCB(0x0e, 0x65);3.125fps night mode for 50Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x07);write_SCCB(0x0e, 0x65);4.2 Night Mode with Auto Frame RateFor 24Mhz/26Mhz Clock Input30fps ~ 3.75fps night mode for 60Hz light environment SCCB_salve_Address = 0x42;OV TCo n fi de n t i al Fo r S u nn ywrite_SCCB(0x11, 0x01);write_SCCB(0x0e, 0xf5);15fps ~ 3.75fps night mode for 60Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x03);write_SCCB(0x0e, 0xe5);25fps ~ 3.125fps night mode for 50Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x01);write_SCCB(0x0e, 0xf5);14.3fps ~ 3.6fps night mode for 50Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x03);write_SCCB(0x3b, 0xe5);For 13Mhz Clock Input30fps ~ 3.75fps night mode for 60Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x00);write_SCCB(0x0e, 0xf5);15fps ~ 3.75fps night mode for 60Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x01);write_SCCB(0x0e, 0xe5);25fps ~ 3.125fps night mode for 50Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x00);write_SCCB(0x0e, 0xf5);14.3fps ~ 3.6fps night mode for 50Hz light environment SCCB_salve_Address = 0x42;write_SCCB(0x11, 0x01);write_SCCB(0x0e, 0xe5);Note:When OV7725 is set to low frame rate, there may be many white pixels shown on LCD of mobile phone or on PC diaplay.OV TCo n fi de n t i al Fo r S u nn y5. Remove Light Band 5.1 Light BandThe strength of office light is not even. It changes with AC frequency. For example, if the AC frequency is 50Hz, the light changes strength at 100hz.5.2 Remove Light bandLight band is removed by set exposure to n/100 (n/120 for 60Hz)seconds. The banding filter value tell OV7725 how many lines is 1/100 (1/120 for 60Hz) seconds.5.3 Select Banding Filter by Region InformationThe region information of mobile phone could be used to select banding filter values. A light frequency table is built to indicate which region uses 50Hz light and which region uses 60Hz light. When region information is got, the light frequency information could be get from the table.Different frame rate could be used for different light frequency. So the frame rate is optimized for Not n/100, has band= n/100, no bandAC Light OV TCo n fi de n t i al Fo r S u nn yboth 50hz light condition and 60hz light condition.Banding Filter Setting for 24Mhz Input Clock30fps for 60Hz light frequency SCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //banding filter enable write_SCCB(0x22, 0x7f); //60Hz banding filter write_SCCB(0x23, 0x03); //4 step for 60hz 15fps for 60Hz light frequency SCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //banding filter enable write_SCCB(0x22, 0x3f); //60Hz banding filter write_SCCB(0x23, 0x07); //8 step for 60hz 25fps for 50Hz light frequency SCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //banding filter enable write_SCCB(0x22, 0x98); //50Hz banding filter write_SCCB(0x23, 0x03); //4 step for 50hz 14.3fps for 50Hz light frequency SCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //banding filter enable write_SCCB(0x22, 0x4c); //50Hz banding filter write_SCCB(0x23, 0x06); //7 step for 50hzBanding Filter Setting for 13Mhz/26Mhz Input Clock 30fps for 60Hz light frequency SCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //banding filter enable write_SCCB(0x22, 0x89); //60Hz banding filter write_SCCB(0x23, 0x03); //4 step for 60hz15fps for 60Hz light frequency SCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //banding filter enable write_SCCB(0x22, 0x44); //60Hz banding filter write_SCCB(0x23, 0x07); //8 step for 60hz 25fps for 50Hz light frequency SCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //banding filter enable write_SCCB(0x22, 0xa5); //50Hz banding filter write_SCCB(0x23, 0x03); //4 step for 50hz 14.3fps for 50Hz light frequencyOV TCo n fi de n t i al Fo r S u nn ySCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //banding filter enable write_SCCB(0x22, 0x52); //50Hz banding filter write_SCCB(0x23, 0x06); //7 step for 50hz5.4 When Light Band can not be RemovedNormally the light band is removed by banding filter.But there is some special conditions such as mix light of sun light and office light, take picture of florescent light, the light band can not removed. The reason is the exposure time is less than 1/100 second for 50hz light environment and less than 1/120 second for 60hz light environment, so the light band can not be removed.The light band is this conditions could not be removed for all CMOS sensors, not only OV7725. So there is no way to remove light band in this condition.6. White BalanceOV7725 support simple white balance and advanced balance.6.1 Simple White BalanceSimple white balance assume “gray world”. Which means the average color of world is gray. It is true for most environment.Advantage of simple AWBSimple white balance is not depend on lens. A general setting for simple white balance could applied for all modules with different lens.Disadvantage of simple AWBThe color is not accurate in conditions where “gray world” not true. For example the background has a huge red, blue or green etc. the color of the foreground is not accurate. If the camera target single color such as red, blue, green, the simple white balance will make the single color gray.SettingsSCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //AWB onwrite_SCCB(0x69, 0x5d); // Simple AWB6.2 Advanced White BalanceAdvanced white balance uses color temperature information to detect white area and do the white balance.OV TCo n fi de n t i al Fo r S u nn yAdvantage of Advanced AWBColor is more accurate than simple white balance. Even the background is single color, the camera will not make the single color gray.Disadvantage of Advanced AWBAdvanced white balance setting is depend on lens. The setting must be adjusted for every module with new lens. The adjustment must be done by OmniVision FAE in optical lab with some optical equipment such as light box, color checker etc.SettingsContact with OmniVision local FAE.6.3 How to select?Generally, for low resolution camera module such as CIF, VGA and 1.3M, simple AWB is selected. For high resolution camera module such as 2M, 3M, advanced AWB is selected.7. Defect Pixel CorrectionDefect pixel include dead pixel and wounded pixel.Dead pixel include white dead pixel and black dead pixel. White dead pixel is always white no matter the actual picture is bright or dark. Black dead pixel is always black no matter the actual picture is bright or dark.Wounded pixel may change with light, but not as much as normal pixel. White wounded pixels are much brighter then normal pixels, but not complete white. Black wounded pixels are much darker than normal pixels, but not complete black.OV7725 has built-in defect pixel correction function. If OV7725 output YCbCr, RGB565,Processed raw RGB, the defect pixel correction function could be enabled to fix defect pixels. But if Bayer raw RGB is used, the defect pixel correction function of sensor could not be used. The defect pixel correction of backend chip should be used instead.Please pay attention to the defect pixel correction function of backend chip. Some backend chip may not be able to correct all defect pixels of OV7725.8. BLCThe function of Black Level Calibration (BLC) is to product accurate color in the dark area of picture. There is automatic BLC function built-in OV7725. It should always be turned on.9. Video ModeVideo mode need high frame rate, usually fixed 15fps. There is no night mode for video mode.OV TCo n fi de n t i al Fo r S u nn y10. Digital zoomIf OV7725 output image smaller than QVGA, it may support digital zoom. For exampleVGA not digital zoom supported QVGA 1x, 2x QQVGA 1x, 2x, 4x QCIF 1x, 1.8x QQCIF 1x, 2x, 3.6x If backend chip support scale up, then more zoom level could be supported.11. OV7725 Functions11.1 Light ModeAutoSCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //AWB on write_SCCB(0x0e, 0x65); write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);SunnySCCB_salve_Address = 0x42;write_SCCB(0x13, 0xfd); //AWB off write_SCCB(0x01, 0x5a);write_SCCB(0x02, 0x5c);write_SCCB(0x0e, 0x65); write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);CloudySCCB_salve_Address = 0x42;write_SCCB(0x13, 0xfd); //AWB off write_SCCB(0x01, 0x58);write_SCCB(0x02, 0x60);write_SCCB(0x0e, 0x65); write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);OfficeSCCB_salve_Address = 0x42;write_SCCB(0x13, 0xfd); //AWB off write_SCCB(0x01, 0x84);write_SCCB(0x02, 0x4c);write_SCCB(0x0e, 0x65); write_SCCB(0x2d, 0x00);OV TCo n fi de n t i al Fo r S u nn ywrite_SCCB(0x2e, 0x00);HomeSCCB_salve_Address = 0x42;write_SCCB(0x13, 0xfd); //AWB off write_SCCB(0x01, 0x96);write_SCCB(0x02, 0x40);write_SCCB(0x0e, 0x65); write_SCCB(0x2d, 0x00);write_SCCB(0x2e, 0x00);NightSCCB_salve_Address = 0x42;write_SCCB(0x13, 0xff); //AWB on write_SCCB(0x0e, 0xe5);11.2 Color SaturationThe color saturation of OV7725 could be adjusted. High color saturation would make the picture looks more vivid, but the side effect is the bigger noise and not accurate skin color.Saturation + 4SCCB_salve_Address = 0x42;write_SCCB(0xa7, 0x80);write_SCCB(0xa8, 0x80);Saturation + 3SCCB_salve_Address = 0x42;write_SCCB(0xa7, 0x70);write_SCCB(0xa8, 0x70);Saturation + 2SCCB_salve_Address = 0x42;write_SCCB(0xa7, 0x60);write_SCCB(0xa8, 0x60);Saturation + 1SCCB_salve_Address = 0x42;write_SCCB(0xa7, 0x50);write_SCCB(0xa8, 0x50);Saturation 0SCCB_salve_Address = 0x42;write_SCCB(0xa7, 0x40);write_SCCB(0xa8, 0x40);OV TCo n fi de n t i al Fo r S u nn y。
OV7725
gpio_i2c_write(I2C_OV7725, 0x13, 0xf0); gpio_i2c_write(I2C_OV7725, 0x0d, 0x41);//0x51/0x61/0x71 for different AEC/AGC window gpio_i2c_write(I2C_OV7725, 0x0f, 0xc5); gpio_i2c_write(I2C_OV7725, 0x14, 0x11);//0x81 gpio_i2c_write(I2C_OV7725, 0x22, 0x7f);//ff/7f/3f/1f for 60/30/15/7.5fps gpio_i2c_write(I2C_OV7725, 0x23, 0x03);//01/03/07/0f for 60/30/15/7.5fps gpio_i2c_write(I2C_OV7725, 0x24, 0x50);//0x80
基于STM32的智能家居系统设计-毕业论文

---文档均为word文档,下载后可直接编辑使用亦可打印---摘要随着5G时代的到来,万物互联即将成为现实, 智能家居也悄然声息地进入到人们的生活中,我们的生活方式也会发生翻天覆地的改变, 变得更方便, 变得更高质量。
智能家居是Iot以住宅为平台,将总线技术、无线网络技术、安全防范技术、自动控制技术、音视频技术等技术按照人们的需求有机结合在一起,搭建成一个高质量、高效率的日常事务和各设备管理系统,与普通家居相比,不仅提高家居安全性、舒适性、便利性,环保性,还节省了各种能源费用。
本设计利用Crotex-M3内核的STM32作为智能家居控制系统的上位机,通过GUI界面查看各传感器反馈的实时信息,也可以通过操控图形界面来根据这些信息进行对应的处理。
大部分模块由STC89C52单片机作为下位机来驱动, 安防方面的模块由STM32驱动,STM32和AT89C52之间通过ESP8266模块作为通讯工具,利用IEEE 802.11(WIFI)协议进行通讯。
本篇毕业设计论文主要详细描述了智能家居中的安防系统开发和各相关模块的功能实现的具体过程,最终利用GSM模块,人体红外传感器,指纹识别模块,摄像头监控等实现实时报警提醒和远程监控,及时做好相应的措施来避免灾难的发生和人员伤亡,保证财产安全。
关键字:嵌入式;STM32;智能家居;指纹识别;远程监控;GSMDesign of smart home system——Security system software developmentAbstractWith the coming of 5G era, the Internet of everything is about to become a reality, smart home also quietly enters into people's life, and our life style will change dramatically, become more convenient, become higher quality. Smart home is IOT's residential platform, which combines bus technology, wireless network technology, security technology, automatic control technology, audio and video technology and other technologies according to people's needs to build a high-quality and efficient daily affairs and equipment management system. Compared with ordinary home, it not only improves home safety, comfort, convenience, and environment also saves all kinds of energy costs.In this design, STM32 of crotex-m3 core is used as the upper computer of smart home control system. The real-time information fed back by each sensor can be viewed through GUI interface, and the corresponding processing can be carried out according to these information through the operation of graphic interface. Most of the modules are driven by STC89C52 as the lower computer, and the security module is driven by STM32. Between STM32 and AT89C52, the communication tool is esp8266 module, which uses IEEE 802.11 (WiFi) protocol to communicate. This thesis mainly describes the development of the security system in the smart home and the specific process of the function realization of each related module. Finally, the GSM module, human infrared sensor, fingerprint identification module, camera monitoring and other modules are used to realize the real-time alarm and remote monitoring, and corresponding measures are taken in time to avoid the occurrence of disasters and casualties and ensure the property safety.Keywords: embedded; STM32; smart home; fingerprint recognition; remote monitoring; GSM目录1、绪论 (1)1.1智能家居系统研究背景 (1)1.2 智能家居中安防系统的重要性 (1)2、智能家居控制系统方案设计 (2)2.1总体思路 (2)2.2安防界面设计 (4)3、硬件设计 (5)3.1 上位机的选择 (5)3.2安防模块介绍 (6)3.2.1GSM/GPRS模块介绍 (6)3.2.2指纹解锁模块介绍 (7)3.2.3人体红外检测模块介绍 (9)3.2.4摄像头模块介绍 (11)4、软件设计 (13)4.1开发工具介绍 (13)4.1.1 SourceInsight代码编辑软件 (13)4.1.2 MDK5编程软件 (14)4.1.3 串口调试助手XCOM (15)4.1.4 SynoChip芯片测试软件 (16)4.2 操作系统UCOSIII (17)4.2.1 UCOSIII任务管理 (17)4.2.2 UCOSIII的移植 (19)4.3 Stemwin图形界面开发 (21)4.3.1 Stemwin的移植 (21)4.3.2 Stemwin的配套开发工具介绍 (22)5、智能家居系统上位机安防功能设计 (25)5.1 初始化工作 (25)5.2创建任务与启动任务 (25)5.2.1 TOUCH任务 (25)5.2.2 CHECK任务 (26)5.2.3 EMWIN任务 (27)5.3 界面介绍 (28)5.3.1安防-主界面 (28)5.3.2安防-设置界面 (28)5.3.3安防-指纹解锁门禁界面 (29)5.3.4安防-信息监测界面 (30)5.3.5安防-摄像头监控界面 (30)5.3.6安防-手动开关界面 (31)5.4 安防系统 (32)5.4.1传感器信息监测设计 (32)5.4.2 报警系统-GSM短信通知设计 (37)5.4.3门禁系统设计 (43)5.4.4 门禁系统-人体红外检测 (52)5.4.5 摄像头监控设计 (54)6、调试 (56)6.1设置中心-更改手机号码 (56)6.2设置中心-更改门禁系统相关参数 (57)6.3添加、验证指纹 (58)6.4删除指纹 (60)6.5更改、验证密码 (62)6.6传感器信息监测 (64)6.7在手动控制界面控制下位机 (65)6.8摄像头监控与抓拍图片查看 (66)7、总结 (67)7.1心得与收获 (67)7.2 设计过程遇到的难题与不足 (68)7.2.1关于界面制作的选择 (68)7.2.2关于GSM模块的问题 (68)参考文献 (70)谢辞 (71)附录 (72)附录1程序源码 (72)主界面的源代码 (72)信息监测界面源代码 (74)设置界面的源代码 (83)手动控制界面源代码 (87)门禁系统界面源代码 (91)摄像头监控界面源代码 (103)附录2 英语文献 (112)附录3 中文文献 (119)1、绪论1.1智能家居系统研究背景随着人们的生活水平不断提高,人们对生活环境的要求逐渐升高,人们越发重视家庭中生活的舒适,安全和便利。
滚球控制系统的设计与实现

Automatic Control •自动化控制Electronic Technology & Software Engineering 电子技术与软件工程• 129【关键词】平板 STM32单片机 OV7725摄像头 舵机 LCD1 设计任务在边长为65cm 光滑的正方形平板上均匀分布着9个外径3cm 的圆形区域,其编号分别为1~9号。
设计一个控制系统,通过控制平板的倾斜,使直径不大于2.5cm 的小球能够按照指定的要求在平板上完成各种动作,并从动作开始计时并显示,单位为秒。
2 系统分析对小球进行受力分析,理想状态下,小球的加速度与板的倾角程正比例关系,其关系式为a=gsinx ,x 为板子倾斜角度,速度为a 的积分,位移为速度的积分。
如果取速度为直接控制量的话,那角度与速度的对应关系是直接的线性关系。
假设执行机构与板子倾斜度的传递函数值为1,那么P 控制可以完美控制小球的速度,进而控制小球的位移。
但实际系统中,小球的加速度与板子倾斜角度并非完全是线性关系,此时要加D 及时修正,并且小球与平板存在静摩擦,有时给一定倾斜角度并不会使其运动,所以要加I 进行补偿,但是I 的滞后非常严重,不适用于动态系统,故应采用积分分离的PID 控制方法来控制小球的速度。
如果要得到良好的位移相应曲线,能控制速度从根本上解决超调失调的现象。
故本题可采用串级PID 的方式,将当前位移差期望的速度送到内环PID 去修正补偿,以追随当前期望速度,具体算法在后续文字中有部分说明。
可近似为a=gx 。
3 模块选型控制模块:控制模块是整个控制系统的核心,承载着执行控制算法,实现控制功能的作用。
因此,要保证系统整体的控制质量,控制器的选择非常重要!在控制器的选择方案中,选择技术成熟,应用广泛的STM32作为主控芯片。
滚球控制系统的设计与实现文/鲁放 张宸赫 郑晗检测模块:检测模块是系统的“眼睛”,从根本上决定了整个系统的控制精度,在进行选型时统筹考虑检测精度与检测速度,再进行众多比较后选择兼具速度与精度的OV7725搭配K60最小系统板初步处理原始观测数据组成检测模块。
基于NRF24L01的无线传输图像方案设计

技术创新45基于N R F24L01的无线传输图像方案设计◊成都大学信息与科学工程学院方红肖宇刘嘉艺张诗艺本文基于NRF24L01设计一种无线传输图像的方案并进行 了验证,详细介绍系统的硬件模块,以及无线传输图像的代 码设计。
硬件系统上主要是以STM32F103作为主控制器,0V7725摄像头采集图像,NRF4L01为无线传输模块。
该系统可 以稳定的传输图像,可应用于监控系统,无人机等领域。
随着如今伩器设备的小型化、智能化,人们对设备的易操 作性、便携性也日益提高了要求。
而无线图像传输作为智能 化、易操作的依据之一,也是目前科研领域的一大热门课题。
无线图像传输主要可以应用在无人机侦察,移动监控,灾情勘 察等等民生或者军事领域,拥有广阔的应用场景。
本文主要是 提出一种无线传输图像的系统设计方案,采用S T M32F103作为 主控制器,O V7725摄像头担任图像采集的任务,而N R F4L01模 块完成图像的无线发送和接收。
N R F24L01作为一种无线通信技术,其拥有远距离、低功 耗、低成本和低复杂度等诸多优点,并且非常稳定[1]。
整个系统 由两个整体部分构成,一个整体部分担任主机,另一个整体部 分担任从机,从而实现图像的规亂1系统设计本系统通过主要是由两个S T M32最小系统、O V7725摄像 头、N R F24L01和L C D等模块组成。
其中N R F24L01作为最重要 的一部分承担无线传输来自主控的指令以及传输由摄像头采集 的图像。
整个系统分为主机与从机,主机以S T M32最小系统则 作为系统的主控制,以SPI操作配置N R F24L01,同时使用通用 异步收发串口(U S A R T)的方式实现被采集图像的发送到从 机,从机同样以S T M32最小系统作为主控制器,N R F24L01为接 收图像的通信模块,并加上L C D模块实现对接收到的图像进行 显示,N R F24L01在实际实验中无外接天线情况下通信距离约为 15m。
ov7725数字摄像头编程基本知识笔记
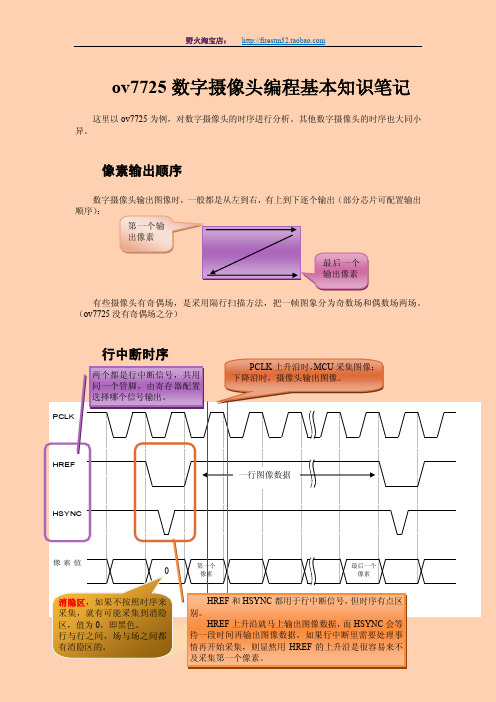
PCLKHREFHSYNC 像素值ov7725数字摄像头编程基本知识笔记这里以ov7725为例,对数字摄像头的时序进行分析。
其他数字摄像头的时序也大同小异。
像素输出顺序数字摄像头输出图像时,一般都是从左到右,有上到下逐个输出(部分芯片可配置输出顺序):有些摄像头有奇偶场,是采用隔行扫描方法,把一帧图象分为奇数场和偶数场两场。
(ov7725没有奇偶场之分)行中断时序0 第一个输出像素最后一个输出像素 最后一个像素 消隐区,如果不按照时序来采集,就有可能采集到消隐区,值为0,即黑色。
行与行之间,场与场之间都一行图像数据 第一个 像素 PCLK 上升沿时,MCU 采集图像;下降沿时,摄像头输出图像。
HREF 和HSYNC 都用于行中断信号,但时序有点区别。
HREF 上升沿就马上输出图像数据,而HSYNC 会等待一段时间再输出图像数据,如果行中断里需要处理事情再开始采集,则显然用HREF 的上升沿是很容易来不两个都是行中断信号,共用同一个管脚,由寄存器配置选择哪个信号输出。
场中断时序采集图像思路①使用for 循环延时采集1. 需要采集图像时,开场中断2. 场中断来了就开启行中断,关闭场中断3. 行中断里用for 循环延时采集像素,可以在行中断里添加标志位,部分行不采集,即可跨行采集。
4. 行中断次数等于图像行数时即可关闭行中断,标志图像采集完毕。
②使用场中断和行中断,DMA 传输1. 需要采集图像时,开场中断2. 场中断来了,开行中断和初始化DMA 传输3. 行中断来了就设置DMA 地址,启动DMA 传输。
如果先过滤部分行不采集,则设置一个静态变量,每次行中断来了都自加1,根据值来选择采集或不采集某些行。
4. 每个PCLK 上升沿来了都触发DMA 传输,把摄像头输出的值读取到内存数组里。
当触发n 次(n=图像列数目)后就停止DMA 传输。
5. 行中断次数等于一幅图像的行数,或者等待下一个场中断来临 就结束图像采集,关闭行中断和场中断。
CMOS图像传感器调试问题汇总1.

摄像头问题及解决办法汇总一、名词解释1.白平衡白平衡指的是传感器对在光线不断变化环境下的色彩准确重现的能力表示。
大多数拍照系统具有自动白平衡的功能,从而能在光线条件变化下自动改变白平衡值。
设计工程师寻找的图像传感器应该配备了一个很好的自动白平衡(AWB控制,从而提供正确的色彩重现。
2.动态范围动态范围测量了图像传感器在同一张照片中同时捕获光明和黑暗物体的能力,通常定义为最亮信号与最暗信号(噪声门槛级别比值的对数,通常用54dB来作为商业图像传感器的通用指标。
具有较宽动态范围的图像传感器可以在明光环境下提供更好的性能(例如,使用较窄动态范围传感器在明光环境下拍出的照片会出现“水洗”或模糊的现象。
3.工频干扰(BandingSensor在日光灯作为光源下获取图像数据时会产生flicker,其根本原因是照在不同pixel上光能量不同产生的,所接受的光能量的不同也就是图像的亮度的不同。
由于CMOS sensor的曝光方式是一行一行的方式进行的,任何一个pixel的曝光时间是一样的,也就是同一行上的每个pixel的曝光开始点和曝光的时间都是一模一样的,所以同一行的所有点所接收到的能量是一样的,而在不同行之间虽然曝光时间都是一样的,但是曝光的开始点是不同的,所以不同行之间所接受到的能量是不一定相同的。
为了使不同行之间所接受的能量相同,就必须找一个特定的条件,使得每一行即使曝光开始点不同,但是所接受的光能量是相同的,这样就避开了flicker,这个特定的条件就是曝光时间必须是光能量周期的整数倍时间。
Banding由工频干扰引起,交流电光源都有光强的波动,在中国交流电频率是50Hz,光强的波动就是100Hz,周期10ms。
如果camera曝光时间不是10ms的整数倍,那么在不同的感光面接收到的光能量一定不一样,体现在图像上就是有明暗条纹。
消除banding就得想办让曝光时间是10ms的整数倍!60Hz的交流电需要控制曝光时间为8.33ms的整数倍。
基于物联网技术的智能家居系统设计与实现

基于物联网技术的智能家居系统设计与实现李亚慧,刘娜,刘国权,温丹丽(沈阳师范大学软件学院,沈阳110034)摘要:5G技术与物联网技术的愈发成熟,使得人们在点滴生活中感受高科技带来的便利,智能家居逐渐深入人们的生活中。
基于物联网技术,采用结构化设计方案,完成智能家居系统的设计,该系统包括网络通信、家电智能控制和安全保护功能部分。
相比于市面上大多智能家居系统,该系统还着重考虑了住宅环境的安全防范问题,采用门窗配有红外检测仪、室內地板配有重力感应设备等,优化和提升了用户的居住体验。
关键词:智能家居;网络控制;物联网技术1概述智能家居(smart home,home automation)是以住宅为平台,利用综合布线技术、网络通信技术、安全防范技术、自动控制技术、首视频技术将家居生活有关的设施集成,构建高效的住宅设施与家庭日程事务的管理系统,提升家居安全性、便利性、舒适性、艺术性,并实现环保节能的居住环境。
现阶段的智能家居仍处于发展期,智能家居与某些地区的住房条件整合度还不够好、安全性欠缺、识别不灵敏等问题造成智能家居仍存在问题。
该系统除了实现常规的管理外,还在安全防盗、灵敏度控制等方面做了优化。
物联网技术简单来说是在互联网的基础上,利用无线数据通信技术、射频识别技术等构建一个以实现物与物,人与物的智能化连接系统。
具体来讲是通过各种信息传感器、定位系统、红外感应设备等按规定的协议实时采集需要监控的物体或过程信息,通过服务器平台呈现给用户操作。
2系统设计与实现2.1系统设计设计的智能家居系统包括网络通信、家电智能控制和安全保护功能。
分别由无线传输模块、设备控制模块 和手动控制模块、智能安防模块实现,并配备其他模块以实现具体功能。
网络通信方面,采用无线传输模块兼具两种模式,AP模式使得手机,平板电脑等支持WiFi通信的设备可以连接到当前模式。
家电智能控制方面采用家电通过语音识别人类发出的指令以进行人机对话;采用步进电机控制门窗的开启与关闭;矩阵键盘来对本系统的窗帘、开关灯、开关门、开关风扇、灯的亮度和风扇风力强度实现手动控制。
电赛

滚球控制系统(B题)【本科组】一、系统方案本系统主要由单片机最小系统、摄像头模块、LCD模块、电源模块组成,下面分别论证这几个模块的选择。
1、最小系统结构的论证与选择方案一:stc89c51最小系统板。
stc89c51系列的单片机是目前使用最普遍的单片机之一,它的使用十分简单,软件设计并不复杂,但是它的定时器不能同时输出几路PWM波形,不能同时控制几个直流电机。
主频速度只能达到1Mhz。
方案二:STM32F103ZET6最小系统板。
STM32F103ZET6是ST公司生产的单片机之一。
综合以上二种方案,选择方案二。
2、电机的论证与选择方案一:直流电机。
电机电压为控制变量,以位置或速度为命令变量。
但是需要反馈控制系统,且不能精确定位控制。
方案二:步进电机是以步阶方式分段移动,步进电机采用直接控制方式,它的主要命令和控制变量都是步阶位置,所步进电机课实现精确定位控制。
综合以上二种方案,选择方案二。
3.技术路线的比较与选择方案方案一:用FPGA来产生电机的控制信号。
但FPGA成本高且电路复杂,用的不娴熟,顾放弃此方案。
方案二:用模拟电路来产生电机的控制信号。
对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要500Hz(周期是2ms)的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用5mV以上的控制电压的变化就会引起电机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到电机的控制精度要求方案三:用单片机作为电机的控制单元。
我们采用STM32F103ZET6,该款单片机资源丰富,16位的单片机使PWM信号的脉冲宽度实现微秒级的变化,从而提高电机的转角精度单片机完成控制算法,再将计算结果转化为PWM信号输出到电机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,受外界干扰较小,整个系统抗干扰能力强。
基于OpenMV的红外引导式AGV搬运小车何美漫熊玮

基于OpenMV的红外引导式AGV搬运小车何美漫熊玮发布时间:2022-03-14T14:08:23.679Z 来源:《中国科技信息》2021年11月下作者:何美漫熊玮[导读] 设计了一种基于OpenMV 的红外引导式AGV搬运小车。
上海理工大学光电信息与计算机工程学院何美漫熊玮上海 200093摘要:设计了一种基于OpenMV 的红外引导式AGV搬运小车。
搬运小车采用STM32F103ZET6处理器作为主控芯片;使用OpenMV对二维码和物块颜色进行识别,根据所获取的信息进行路径规划;利用红外传感器进行定位与寻迹;通过机械爪配合六自由度机械臂进行物块的抓取与放置;电源通过DC/DC降压模块为各个模块提供稳定的工作电压;利用L298N芯片来驱动编码直流电机,带动麦克纳姆轮转动,实现多方位移动。
经实验验证,搬运小车能准确读取信息,并将不同颜色物块按照搬运顺序摆放至正确位置。
关键词:OpenMV;AGV搬运小车;STM32;L298N;麦克纳姆轮0引言随着工业4.0的兴起,现代工业已进入了新的发展阶段,技术逐渐转向大数据化、智能化、结构物联网化、环境绿色化[2]。
自动向导车(AGV)作为一种新型智能机器人,是一类能够沿着规定的导航路线行驶的小车。
以蓄电池作为动力源,在无需人工引导下,可以通过系统预设的算法,自行规划出预定路线,并根据路线自行驾驶。
其具有柔性好,自动化程度好和智能化水平高等特点。
鉴于其生产成本低、效率高、安全性能强,可以被广泛应用于仓储业、制造业、医药、化工、机场、图书馆等诸多领域[1]。
因此,为了顺应时代的发展,我们设计制作了“一种基于OpenMV 的红外引导式AGV搬运小车”。
1 系统总体方案1.1 系统设计要求要求设计一款基于OpenMV 的红外引导式AGV搬运小车,小车能够自行完成物料搬运工作。
工作主要有以下两方面的内容:(1)机械臂配合OpenMV摄像头正确地读取二维码任务信息,以及识别不同颜色物料的位置,并将所获得的信息清晰地显示在LCD屏幕上。