超定方程最小二乘解
求超定方程组的最小二乘解
求超定方程组的最小二乘解最小二乘法是一种常用的数学方法,用于求解超定方程组的近似解。
超定方程组指方程的个数多于未知数的个数,因此无法直接求解精确解。
而最小二乘法通过将方程组中的每个方程的残差平方之和最小化,找到一个最接近解的估计值。
最小二乘法的应用非常广泛,尤其在数据拟合和回归分析中被广泛使用。
举个例子来说,假设我们有一组观测数据,表示了某个物理过程的实际情况。
而我们想要通过一个数学模型来描述这个物理过程。
但是由于观测误差等原因,我们无法通过这组数据直接得到精确的解。
这时,我们可以使用最小二乘法来逼近这个数学模型。
首先,我们假设这个数学模型是一个线性方程组。
然后,我们根据观测数据,使用最小二乘法来找到一个最接近的解。
具体的求解步骤如下:1. 假设我们的线性方程组可以表示为 Ax = b 的形式,其中 A是一个 m 行 n 列的系数矩阵,x 是一个 n 维列向量表示未知数,b是一个 m 维列向量表示观测数据。
2. 我们的目标是找到一个最小二乘解 x*,使得 ||Ax - b||^2 = min。
其中,||.|| 表示向量的模(即向量的长度的平方)。
3. 通过数学推导可以得到,最小二乘解可以通过求解正规方程组ATAx = ATb 得到。
其中,AT 是 A 的转置矩阵,A^T 表示 A 的伪逆矩阵。
4. 求解正规方程组的方法有多种,最常见的是使用矩阵的分解方法,如QR分解或奇异值分解等。
通过以上步骤,我们可以得到最小二乘解 x*,并使用它来逼近我们的数学模型。
最小二乘法的优点在于它能够处理带有误差的观测数据,提供一个最优的近似解。
它在实际应用中具有广泛的指导意义。
举个实际案例来说,假设我们要估计一辆汽车的燃油消耗量与其速度的关系。
我们首先收集了一组汽车在不同速度下的燃油消耗数据。
然后,我们可以使用最小二乘法来拟合一个线性模型,得到一个最优的近似解。
通过最小二乘法,我们可以得到一个线性关系的方程,表示速度与燃油消耗量之间的关系。
c++ 矩阵超定方程的最小二乘求解
在进行C++矩阵超定方程的最小二乘求解时,我们首先需要理解什么是矩阵超定方程和最小二乘法。
矩阵超定方程指的是方程组的数量多于未知数的数量,这种情况下无法精确求解方程组,因为方程组中存在冗余信息。
而最小二乘法是一种数学优化方法,用于寻找一组参数,使得函数的预测值与实际观测值之间的残差平方和最小化。
在C++中,我们可以利用已有的数学库或自己编写矩阵运算的函数来实现矩阵超定方程的最小二乘求解。
我们需要将超定方程组表示成矩阵形式,例如 A * x = b,其中 A 是m×n 的矩阵(m > n),x 是n×1 的未知数向量,b 是m×1 的观测值向量。
然后我们可以利用最小二乘法来求解未知数向量 x。
在C++中,我们可以使用Eigen这样的成熟数学库来进行矩阵运算和最小二乘求解。
Eigen提供了方便的矩阵和向量操作接口,使得矩阵超定方程的最小二乘求解变得非常简单和高效。
我们可以使用Eigen中的LeastSquaresConjugateGradient类或其他最小二乘求解器来解决超定方程组,从而得到最优的未知数向量 x。
除了使用成熟的数学库外,我们还可以自己编写矩阵运算和最小二乘求解的函数。
通过理解最小二乘法的原理和矩阵运算的基本操作,我们可以实现一个高效的最小二乘求解算法,用于解决矩阵超定方程。
这种方式可以加深我们对最小二乘法和矩阵运算的理解,同时也可以满足特定的需求和定制化的要求。
在C++中实现矩阵超定方程的最小二乘求解是一项非常重要和有意义的任务。
无论是使用现有的数学库还是自己编写算法,都需要深入理解矩阵运算和最小二乘法的原理,同时结合具体的应用场景来实现高质量、深度和广度兼具的算法。
希望通过我们的努力,能够为矩阵超定方程的最小二乘求解提供更加全面、深入的理解和应用。
希望以上内容对你有所帮助。
如有任何疑问或需要进一步讨论的,欢迎随时与我联系。
矩阵超定方程的最小二乘求解在实际应用中有着广泛的应用,比如在工程、物理学、经济学和统计学等领域。
超定方程组的最小二乘解
第六章 第二节
学
MATH
上页 下页 返回
思维的体操 第六章 第二节 ——加里宁
上页 下页 返回
第六章 第二节
第二节 超定方程组的最小二乘解
设方程组Ax=b中, A=(aij)mn, b是m 维已知向量, x 是n 维解向量,当 m>n 即方程组中方程的个数 多于自变量的个数, 称此方程组为超定方程组.
????????????????????????????????????????????????????????????????763111254213221xx第六章第二节????????????????????????????????????????????????????????????????763111254213221xx正规方程组为上页下页返回正规方程组为????????????????????????????????????????????????????????????????????????????????????????????7631112542132125421321254213221xx第六章第二节即解得即解得????????????????????????????????????????????????????????????????????????????????????????????7631112542132125421321254213221xx上页下页返回?????????????????????485146331821xx??????????2418
ATA是正定矩阵,必有det(ATA)>0。故
AT Ax ATb
的解存在且唯一。可用平方根法或SOR法求解。
上页 下页 返回
例1 求超定方程组
超定方程组最优解(最小二乘解)推导
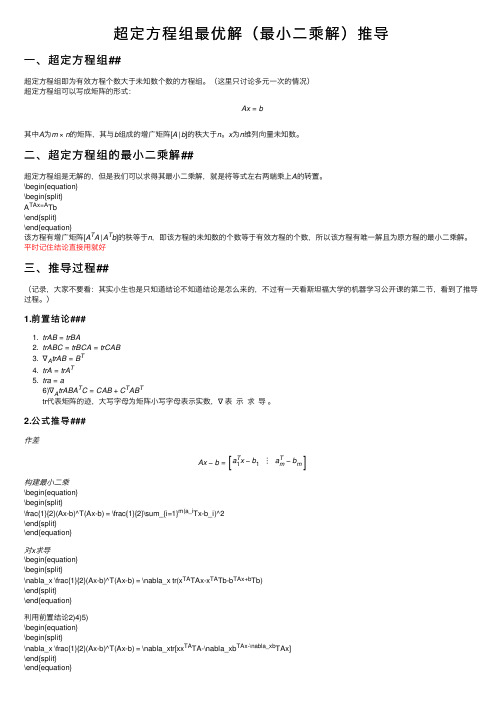
超定⽅程组最优解(最⼩⼆乘解)推导⼀、超定⽅程组##超定⽅程组即为有效⽅程个数⼤于未知数个数的⽅程组。
(这⾥只讨论多元⼀次的情况)超定⽅程组可以写成矩阵的形式:Ax=b其中A为m×n的矩阵,其与b组成的增⼴矩阵[A|b]的秩⼤于n。
x为n维列向量未知数。
⼆、超定⽅程组的最⼩⼆乘解##超定⽅程组是⽆解的,但是我们可以求得其最⼩⼆乘解,就是将等式左右两端乘上A的转置。
\begin{equation}\begin{split}A TAx=A Tb\end{split}\end{equation}该⽅程有增⼴矩阵[A T A|A T b]的秩等于n,即该⽅程的未知数的个数等于有效⽅程的个数,所以该⽅程有唯⼀解且为原⽅程的最⼩⼆乘解。
平时记住结论直接⽤就好三、推导过程##(记录,⼤家不要看:其实⼩⽣也是只知道结论不知道结论是怎么来的,不过有⼀天看斯坦福⼤学的机器学习公开课的第⼆节,看到了推导过程。
)1.前置结论###1. trAB=trBA2. trABC=trBCA=trCAB3. ∇A trAB=B T4. trA=trA T5. tra=a6)∇A trABA T C=CAB+C T AB Ttr代表矩阵的迹,⼤写字母为矩阵⼩写字母表⽰实数,∇表⽰求导。
2.公式推导###作差[]Ax−b=a T1x−b1⋮a T m−b m构建最⼩⼆乘\begin{equation}\begin{split}\frac{1}{2}(Ax-b)^T(Ax-b) = \frac{1}{2}\sum_{i=1}m(a_i Tx-b_i)^2\end{split}\end{equation}对x求导\begin{equation}\begin{split}\nabla_x \frac{1}{2}(Ax-b)^T(Ax-b) = \nabla_x tr(x TA TAx-x TA Tb-b TAx+b Tb)\end{split}\end{equation}利⽤前置结论2)4)5)\begin{equation}\begin{split}\nabla_x \frac{1}{2}(Ax-b)^T(Ax-b) = \nabla_xtr[xx TA TA-\nabla_xb TAx-\nabla_xb TAx]\end{split}\end{equation}其中利⽤前置结论6)注:⼤括号下的A为前置结论中的A,⼤括号上的A为矩阵A。
超定方程组的最小二乘解原理
超定方程组,又称为过定方程组,是线性代数中的一个概念。
当方程组的未知数数量少于方程数量时,该方程组就被称为超定方程组。
由于超定方程组通常没有精确解,我们常常会寻求一个近似解,使得所有方程的残差平方和最小。
这就是最小二乘解的原理。
一、最小二乘解的基本概念最小二乘法是一种数学优化技术,它通过最小化误差的平方和来寻找数据的最佳函数匹配。
利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和最小。
最小二乘法还可用于曲线拟合,其他一些优化问题也可通过最小化能量或最大化熵用最小二乘法来表达。
二、超定方程组的性质对于超定方程组,由于方程数量多于未知数数量,因此通常不存在一个解能够使得所有方程同时成立。
这种情况下,我们需要寻找一个近似解,即一个解,使得所有方程的残差(即方程的实际值与解代入方程后得到的计算值之间的差)的平方和最小。
三、最小二乘解的原理最小二乘解的原理就是基于上述思想,通过最小化残差平方和来寻找超定方程组的近似解。
具体步骤如下:构建残差平方和函数:首先,我们需要构建一个表示残差平方和的函数。
假设超定方程组有(m) 个方程,(n) 个未知数((m > n)),未知数的向量记作(\mathbf{x} = (x_1, x_2, \ldots, x_n)^T),方程组的系数矩阵记作(\mathbf{A} = (a_{ij})_{m \times n}),常数项向量记作(\mathbf{b} = (b_1, b_2, \ldots, b_m)^T)。
那么,残差向量可以表示为(\mathbf{r} = \mathbf{A}\mathbf{x} - \mathbf{b}),残差平方和函数可以写为(S(\mathbf{x}) = \mathbf{r}^T\mathbf{r} = (\mathbf{A}\mathbf{x} - \mathbf{b})^T(\mathbf{A}\mathbf{x} - \mathbf{b}))。
62第二节 超定方程组的解
2x1 4x2 11.0478 3x1 5x2 2.9119
x1 2x2 5.5239
b1 b2 b3
解得最小二乘解为
x1 x2
3.0403 1.2418
2x1 x2 7.3224 b4
m
n
m
故误差平方和为 I r 2 2
数学学院 信息与计算科学系
nm
m
即有 ( aij aik )xk aij bi ( j 1,2,..., n)
k 1 i1
i 1
此线性方程组写成矩阵形式就是
AT Ax AT b
故x*是 ATAx=ATb 的解.
定理得证.
这里 ATAx=ATb 是关于x1,x2, …,xn的线性 方程组,称为正规方程组或法方程组.
数学学院 信息与计算科学系
解的存在唯一性
由于ATA是n 阶方阵,且是对称阵,当R(A)=n 时, 对任意 y≠0,有Ay≠0 ,所以
yT ( AT A) y ( Ay, Ay) Ay 2 0 2
可见ATA是正定矩阵,必有det(ATA)>0。故法方程
AT Ax AT b
的解存在且唯一.
2 2 yT AT (b Ax* )
2
Ay
2 2
b Ax*
2
Ay 2
b Ax*
2
2
2
2
所以x*是Ax=b 的最小二乘解.
数学学院 信息与计算科学系
必要性 误差向量r=b-Ax 的第 i 个分量为
n
ri bi aik xk (i 1,2,..., m),
python 最小二乘法求解超定
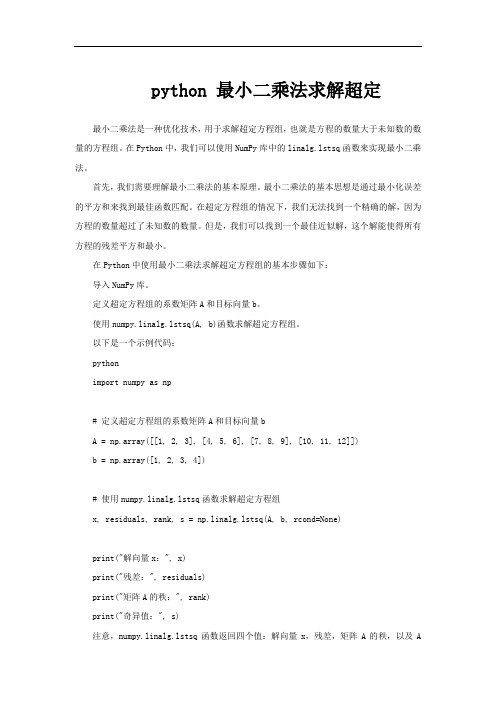
python 最小二乘法求解超定最小二乘法是一种优化技术,用于求解超定方程组,也就是方程的数量大于未知数的数量的方程组。
在Python中,我们可以使用NumPy库中的linalg.lstsq函数来实现最小二乘法。
首先,我们需要理解最小二乘法的基本原理。
最小二乘法的基本思想是通过最小化误差的平方和来找到最佳函数匹配。
在超定方程组的情况下,我们无法找到一个精确的解,因为方程的数量超过了未知数的数量。
但是,我们可以找到一个最佳近似解,这个解能使得所有方程的残差平方和最小。
在Python中使用最小二乘法求解超定方程组的基本步骤如下:导入NumPy库。
定义超定方程组的系数矩阵A和目标向量b。
使用numpy.linalg.lstsq(A, b)函数求解超定方程组。
以下是一个示例代码:pythonimport numpy as np# 定义超定方程组的系数矩阵A和目标向量bA = np.array([[1, 2, 3], [4, 5, 6], [7, 8, 9], [10, 11, 12]])b = np.array([1, 2, 3, 4])# 使用numpy.linalg.lstsq函数求解超定方程组x, residuals, rank, s = np.linalg.lstsq(A, b, rcond=None)print("解向量x:", x)print("残差:", residuals)print("矩阵A的秩:", rank)print("奇异值:", s)注意,numpy.linalg.lstsq函数返回四个值:解向量x,残差,矩阵A的秩,以及A的奇异值。
其中,解向量x就是我们要求的近似解。
以上就是Python中使用最小二乘法求解超定方程组的方法。
最小二乘法求超定方程组例题
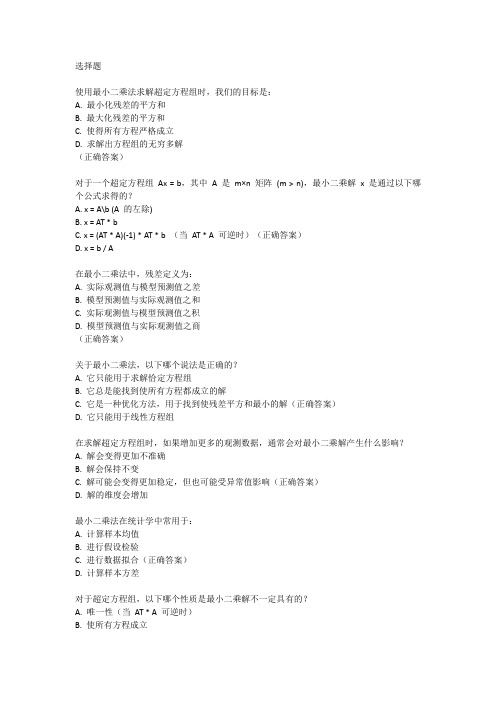
选择题使用最小二乘法求解超定方程组时,我们的目标是:A. 最小化残差的平方和B. 最大化残差的平方和C. 使得所有方程严格成立D. 求解出方程组的无穷多解(正确答案)对于一个超定方程组Ax = b,其中A 是m×n 矩阵(m > n),最小二乘解x 是通过以下哪个公式求得的?A. x = A\b (A 的左除)B. x = AT * bC. x = (AT * A)(-1) * AT * b (当AT * A 可逆时)(正确答案)D. x = b / A在最小二乘法中,残差定义为:A. 实际观测值与模型预测值之差B. 模型预测值与实际观测值之和C. 实际观测值与模型预测值之积D. 模型预测值与实际观测值之商(正确答案)关于最小二乘法,以下哪个说法是正确的?A. 它只能用于求解恰定方程组B. 它总是能找到使所有方程都成立的解C. 它是一种优化方法,用于找到使残差平方和最小的解(正确答案)D. 它只能用于线性方程组在求解超定方程组时,如果增加更多的观测数据,通常会对最小二乘解产生什么影响?A. 解会变得更加不准确B. 解会保持不变C. 解可能会变得更加稳定,但也可能受异常值影响(正确答案)D. 解的维度会增加最小二乘法在统计学中常用于:A. 计算样本均值B. 进行假设检验C. 进行数据拟合(正确答案)D. 计算样本方差对于超定方程组,以下哪个性质是最小二乘解不一定具有的?A. 唯一性(当AT * A 可逆时)B. 使所有方程成立C. 使残差平方和最小D. 是方程组的一个近似解(正确答案)在最小二乘法中,如果观测数据中存在异常值,可能会对最小二乘解产生什么影响?A. 解会变得更加准确B. 解会完全不受影响C. 解可能会受到较大影响,导致偏差(正确答案)D. 解的维度会降低关于最小二乘解,以下哪个说法是不正确的?A. 它是一种逼近解,不一定满足所有方程B. 它的求解过程中涉及到了矩阵运算C. 它总是能给出全局最优解(正确答案)D. 它适用于观测数据多于未知数个数的情况。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
end
b=G\L;
%解几何方程
error=abs(b(1:3)); P=P+b(1:3);k=k+1;
%计算位值修正量绝对值 %修正定位数据
end
toc
%程序运行计时结束
format long e
X=[P;b(4)]'
%显示满足精度的定位数据
Format
计算结果
elapsed_time = 0.0160
GPS-7
17977519.820 -13089823.312 14331151.065 21847468.81689
GPS-8
9682727.508
-24060519.485 3985404.530
20352077.19349
x
y
z
Clock offset
96133.382910 -5674076.3699 2740537.6613 -36000.0000
欠定方程组: 方程个数小于未知量个数的方程组。 对于方程组 Ra=y,R 为 n×m 矩阵,且 n<m。则方程组有无穷多组解,此时称方程组
为欠定方程组。 内点法和梯度投影法是目前解欠定方程组的常用方法。
超定方程组最小二乘解课程设计
最小二乘法广泛地应用于工程计算中,用最小二乘法消除(平滑)误差,用最小二乘法 从有噪声的数据中提取信号,从海量数据中找出数据变化的趋势,……。甚至利用简单函数 计算复杂函数的近似值,我们并不期望它的近似值多么精确(事实上很多时候也不用很精 确),尽管如此还是希望计算出的近似数据与原始数据之间有相似之处。如果从线性代数角 度来理解最小二乘法,实际上是将一个高维空间的向量投影到低维子空间所涉及的工作。
||
b
GX
*
||2
min
XRm
||
b
GX
||2
该问题是一个优化问题。 命题 1:如果 X*是正规方程组 GTGX=GTb 的解,则 X*是超定方程组 GX=b 的最小二乘解 证 由题设可得,GT (b – GX*)=0。对任意 n 维向量 Y,显然有
(X* – Y)TGT (b – GX*)=0 考虑残差 2-范数平方,由
下面数据来自于 Applied mathematics and computation 119(2001)21—34
文章题目:Alternative algorithms for the GPS static positioning solution
作者:John B. Lundberg
表 1 GPS 卫星数据
矩阵的每一行代表一个方程,m 行代表 m 个线性联立方程。 n 列代表 n 个变量。如果 m 是独立方程数,根据 m<n、m=n、m>n 确定方程是 ‘欠定’、‘适定’ 还是 ‘超定’。
超定方程组:方程个数大于未知量个数的方程组。 对于方程组 Ra=y,R 为 n×m 矩阵,如果 R 列满秩,且 n>m 超定方程一般是不存在解的矛盾方程。 例如,如果给定的三点不在一条直线上, 我们将无法得到这样一条直线,使得这条直
其中,(x,y,z) 为接收机坐标,(x j,y j,z j)为卫星 Pj 的坐标; j 是伪距(实际上可得到
的距离观测量)。当已知接收机的概略位置 r0 = (x0,y0,z0)时,可以用牛顿迭代法结合最 小二乘原理实现精确定位。对模型右边应用 Taylor 级数展开,并略去高次项,得到
l jx m jy n jz b Lj
||
b
GY
||22
||
(b
GX
*
)
G( X
*
Y
)
||
2 2
上式右端利用内积,得
||
b
GY
||
2 2
||
b
GX *
||
2 2
|| G( X *
Y)
||22 ||
b
GX *
||
2 2
从而有 || b – GY ||2 ≥ || b – GX*||2
等式仅当 Y=X*时成立。所以 X*是超定方程组 GX=b 的最小二乘解。 命题 2:如果 X*是超定方程组 GX=b 的最小二乘解,则 X*满足正规方程组 GTGX=GTb
设视界内的卫星数为 N。将上述方程组写为矩阵形式,得到 GX=L
其中, X [x y z b]T ,L=[L1,L1,……,LN]T 而
l1 m1 n1 1
G
l
2
m2
n2 1
l
N
mN
nN
1
用最小二乘法求解超定方程组,得正规方程
一、超定方程组的最小二乘解
当方程组 GX=b 的方程数多于未知数个数时,对应的系数矩阵 G 的行数大于列数,此 时方程组被称为是超定方程组。设 G=(giu)m×n,当 m>n 时即所谓的高矩阵,绝大多数情况下, 超定方程组没有古典意义下的解。超定方程组的最小二乘解是一种广义解,是指使残差 r = b – GX 的 2-范数达取极小值的解,即
X=
Columns 1 through 3
9.613338291042342e+005 -5.674076369901314e+006 2.740537661301808e+006
Column 4
-3.600000000248986e+004
数值实验问题 1.一个测绘员要测量出在某个基准点上三个山头 A、B、C 的高度,首先从基准点处
2 4
11
3
1
5 2
x
y
3
6
该方程组的右端向量是三维向量,系数矩阵的每一列也是三维向量,但待求的未知向量却是
二维向量。将系数矩阵按列分块,G =[1,2],记右端向量为。则方程组求解问题可表示 为求组合系数 x 和 y 使
x1 + y2 = 的向量的线性组合问题。由于两个向量1,2 不构成三维空间的一组基,所以一般情况下 这一问题无解。而由向量1,2 张成的子空间 span{1,2}是一张平面,记为。则超定方 程组的最小二乘解实际上是求 X*,使 GX* 恰好等于 在平面上的投影。而最小二乘解所 对应的残差向量则垂直于向量 GX*。事实上,由正规方程组
ID
X
Y
Z
GPS-1
16414028.668 660383.618
20932036.907 24658975.31743
GPS-2
16896800.648 -18784061.365 -7418318.856 22964286.41228
GPS-3
9339639.616
-14514964.658 20305107.161 21338550.64536
其中, x x x0 ,y y y0 , z z z0 ,
lj
x
j R~ j
x0
,mj
,nj
z
j R~ j
z0
Lj j R~ j , R~ j (x j x0 )2 ( y j y0 )2 (z j z0 )2
线同时经过给定这三个点。 也就是说给定的条件(限制)过于严格, 导致解不存在。在实 验数据处理和曲线拟合问题中,求解超定方程组非常普遍。比较常用的方法是最小二乘法。 形象的说,就是在无法完全满足给定的这些条件的情况下,求一个最接近的解。
曲线拟合的最小二乘法要解决的问题,实际上就是求以上超定方程组的最小二乘解的 问题。
GPS-4
-18335582.591 -11640868.305 15028599.071 23606547.29359
GPS-5
-2077142.705 -20987755.987 -15879741.196 24263298.50401
GPS-6
-4957166.885 -23306741.039 12039027.096 20758264.10823
-18335582.591, -11640868.305, 15028599.071
-2077142.705, -20987755.987, -15879741.196
-4957166.885, -23306741.039, 12039027.096
17977519.820, -13089823.312, 14331151.065
9682727.508, -24060519.485, 3985404.530];
ro=[24658975.31743
22964286.41228
21338550.64536
23606547.29359
24263298.50401
20758264.10823
21847468.81689
20352077.19349];
P=[0;0;0];
%设定位数据初始值即概略坐标
error=10;k=0;
tic while error>1e-8
%程序运行计时开始 %设置定位精度
for j=1:8
Dj=xyz(j,:)-P'; dj=norm(Dj);
%计算接收机到第 j 颗卫星向量及其长度
G(j,1:3)=Dj/dj;G(j,4)=-1; L(j,:)=dj-ro(j); %计算几何矩阵第 j 行及方程右端值
GTGX=GTb 的解。如果系数矩阵(GTG)可逆,则正规方程组有唯一解。此时,最小二乘解可以形式地写 为如下形式
X=(GTG)-1GTb 两种常用的方法如下 1.用对称矩阵的三角分解法解正规方程组 GTGX = GTb;记 A=GTG,则 A 是对称矩阵,由 三角分解 A = L D LT,其中 L 是下三角矩阵,D 是对角矩阵。将这一算法写过三个过程: ①解下三角方程组:LY1 = GTb; ②解对角方程组:DY2 = Y1 ; ③解上三角方程组:LTY3 = Y2 2.用矩阵的 QR 分解直接求解超定方程组 由 QR 分解(正交三角分解)G=QR,其中 Q 是正交矩阵,R 是上三角矩阵。将 QR 分解代 入最小二乘解表达式中,得